投影矩阵的求法
几何变换中的投影与展开的计算方法归纳
几何变换中的投影与展开的计算方法归纳几何变换是几何学中的重要概念,广泛应用于建筑设计、工程制图、计算机图形学等领域。
在进行几何变换时,涉及到投影和展开的计算方法。
本文将对几何变换中的投影与展开的计算方法进行归纳总结,并探讨其应用。
一、投影的计算方法投影是指将三维物体沿着某一方向投射到二维平面上的过程。
投影的计算方法主要有平行投影和透视投影两种。
1. 平行投影平行投影是指将物体的每一个点都以平行的方式投射到投影平面上。
常见的平行投影方法有平行投影变换和正交投影变换。
平行投影变换是通过设定投影平面与物体并行,然后将物体上的每个点都沿着投影线投射到投影平面上,得到相应的平行投影图形。
平行投影变换可以使用矩阵乘法来实现,通过定义变换矩阵,将物体上的点坐标进行线性变换,从而得到投影后的图形。
正交投影变换是指通过设定观察点与物体之间的距离为无穷大,使得投影线与投影平面垂直,从而得到平行投影图形。
正交投影变换也可以使用矩阵乘法来实现,通过定义变换矩阵,将物体上的点坐标进行线性变换,从而得到投影后的图形。
2. 透视投影透视投影是指将物体的每一个点都按照透视关系进行投射到投影平面上。
透视投影方法可以通过透视投影变换来实现。
透视投影变换是通过设定观察点与投影平面之间的距离,使得投影线与投影平面的交点距离观察点的距离与物体上相应点距离观察点的距离成一定比例关系,从而得到透视投影图形。
透视投影变换同样可以使用矩阵乘法来实现,通过定义变换矩阵,将物体上的点坐标进行线性变换,从而得到投影后的图形。
二、展开的计算方法展开是指将三维物体展开成为一个平面图形的过程。
展开的计算方法主要有剪切法和展开图法两种。
1. 剪切法剪切法是指通过在物体的边界上切开,然后展开平铺在平面上的方法。
常见的剪切法有剖面展开和倒角展开两种。
剖面展开是指通过在物体的某个剖面上进行切割,并根据切割后的平面形状进行展开。
剖面展开可以通过数学计算和几何推导来得到。
摄像机矩阵和投影矩阵推导
向量 C
x
(位移)向量
虽然多数时候向量纯粹表达方向,但事实上它还带有
长度的信息,向量{x,y,x}在3D空间的长度 是 。故,可以把向量理解为在一个方向 上长度为 的位移。 例如两点之间的距离向量,就是一个典型的位移向量。
我们通常结合上下文,来判断向量是纯粹方向的还是
位移的向量。
向量的基本运算:加法
坐标系的转换和矩阵
后续的内容主要记录World坐标系转换之后的Camera
坐标系,Projection坐标系的转换。
接下来记录的转换矩阵推导,是用DirectX来举例。事
实上,这些推导过程在OpenGL上也是一样的,如果 有差别,也是一些数值上的细微差别,例如DirectX的 远近裁剪面定为[0~1],而OpenGL的定为[-1~1]。
太少了,列举不出来呀。
坐标系的转换
抄录自MSDN,Transform pipeline
Wiki
Transform pipeline,/en-
us/library/windows/desktop/ee418867(v=vs.85).aspx
达两者,但它们在数值层面是一致的。 因方向向量的核心是方向,故两个方向向量的x,y,z数 值可能不同,但方向却是一样的,我们认为这两个方 向向量等价。
点和(方向)向量
方向向量C和B
等价,因它们表达 的方向是相同的。 数值上点A和向量 B相等,但物理意义 不同
y
z
点A{5,2,6} 向量B {5,2,6}
注意到上式左边是叉乘结果向量的模的平方,所以对
等式两边开平方,即得:
上式便是关于叉乘的模的等式。至此,我们知道叉乘
会得到一个垂直于原来两个向量(以及它们所在平面) 的向量,且这个向量的长度满足上述等式。但仍有一 个问题:这个垂直向量朝向那个方向呢?
矩阵投影与最小二乘方法

题目:《神奇的矩阵——矩阵投影与最小二乘方法》学校:哈尔滨工程大学姓名:黎文科联系方式: QQ群:53937814 联系方式: 190356321@矩阵投影与最小二乘方法最小二乘法(Least Squares Method,简记为LSE)是一个比较古老的方法,源于天文学和测地学上的应用需要。
在早期数理统计方法的发展中,这两门科学起了很大的作用。
丹麦统计学家霍尔把它们称为“数理统计学的母亲”。
此后近三百年来,它广泛应用于科学实验与工程技术中。
美国统计史学家斯蒂格勒( S. M. Stigler)指出, 最小二乘方法是19世纪数理统计学的压倒一切的主题。
1815年时,这方法已成为法国、意大利和普鲁士在天文和测地学中的标准工具,到1825年时已在英国普遍使用。
追溯到1801年,意大利天文学家朱赛普·皮亚齐发现了第一颗小行星谷神星。
经过40天的跟踪观测后,由于谷神星运行至太阳背后,使得皮亚齐失去了谷神星的位置。
随后全世界的科学家利用皮亚齐的观测数据开始寻找谷神星,但是根据大多数人计算的结果来寻找谷神星都没有结果。
时年24岁的高斯也计算了谷神星的轨道。
奥地利天文学家海因里希·奥尔伯斯根据高斯计算出来的轨道重新发现了谷神星。
高斯于其1809年的著作《关于绕日行星运动的理论》中。
在此书中声称他自1799年以来就使用最小二乘方法,由此爆发了一场与勒让德的优先权之争。
近代学者经过对原始文献的研究,认为两人可能是独立发明了这个方法,但首先见于书面形式的,以勒让德为早。
然而,现今教科书和著作中,多把这个发明权归功于高斯。
其原因,除了高斯有更大的名气外,主要可能是因为其正态误差理论对这个方法的重要意义。
勒让德在其著作中,对最小二乘方法的优点有所阐述。
然而,缺少误差分析。
我们不知道,使用这个方法引起的误差如何,就需建立一种误差分析理论。
高斯于1823年在误差e 1 ,… , e n 独立同分布的假定下,证明了最小二乘方法的一个最优性质: 在所有无偏的线性估计类中,最小二乘方法是其中方差最小的!在德国10马克的钞票上有高斯像,并配了一条正态曲线。
正交投影矩阵的一个性质

正交投影矩阵的一个性质杜琨;顾桂定【期刊名称】《华东师范大学学报(自然科学版)》【年(卷),期】2012(000)001【摘要】证明了秩为k的正交投影矩阵,一定存在k阶主子阵,其Rayleigh商有一个正的下界.证明中综合使用了矩阵的奇异值、特征值、范数之间的优超关系以及酉矩阵和复合矩阵的性质,为进一步揭示正交投影矩阵的性质提供了一种可能.%In this paper we showed that for an orthogonal projection matrix with rank k, there exists an principal submatrix with order k of the matrix, such that its Rayleigh quotient has a positive lower bound. The proof was made by using the relation of the singular values, eigenvalues and norm of matrices, as well as the properties of unitary matrix and compound matrix.【总页数】3页(P97-99)【作者】杜琨;顾桂定【作者单位】上海财经大学金融学院,上海200433;上海财经大学数学系,上海200433【正文语种】中文【中图分类】O157.5【相关文献】1.正交投影矩阵的一个求法 [J], 张杰;杨春德2.分块正交投影矩阵的一个性质证明 [J], 刘晓冀3.基于正交投影矩阵的强弱信号闭环测向方法 [J], 张倩;陶海红;张博一4.用广义正交投影矩阵求解线性规划 [J], 钮海;王宝富;何光宗5.投影矩阵的Kronecker积及其相关的正交表 [J], 庞善起;闫荣;郭学宾因版权原因,仅展示原文概要,查看原文内容请购买。
投影矩阵
一般的错切
后裁剪面 对象
前裁剪面 投影平面
顶视图和侧视图
θ φ
xp = x – z cot θ
yp = y – z cot φ
错切矩阵
xy 错切(z值不变)
⎡1 ⎢0 H(θ , φ ) = ⎢ ⎢0 ⎢ ⎣0 0 − cot θ 1 − cot φ 0 1 0 0 0⎤ 0⎥ ⎥ 0⎥ ⎥ 1⎦
称这个视景体为正则视景体(canonical view volume)
正交规范化
glOrtho(left, right, bottom, top, near, far) 规范化 ⇒ 求出把指定裁剪体转化为默认裁剪体的变换 (right, top, −far) (1, 1, −1)
(left, bottom, −near)
• •
这些变换都是非奇异的 默认值为单位阵(正交视图)
规范化使得不管投影的类型是什么,都是相对 于默认的简单立方体进行裁剪 能的保留深度信息,这对隐藏面消除是非 常重要的
正则视景体
OpenGL缺省的视景体是中心在原点,边长 为2的立方体,相当于调用
glMatrixMode(GL_PROJECTION); glLoadIdentity(); glOrtho(-1.0, 1.0, -1.0, 1.0, -1.0, 1.0);
OpenGL的透视
glFrustum可以定义非对称视景体,但 gluPerspective不能做到这一点
OpenGL透视矩阵
glFrustum的规范化
• 剪切变换H:把非对称视景棱台变换为对称的 • •
四棱台,远近平面不变 缩放变换S:把四棱台的侧面变换为x= ±z和y= ±z,远近平面不变 透视规范化变换N: x= ±z变换为x= ±1, y= ±z变换为y= ±1,近平面z=-near变换为z=-1, 远平面z=-far变换为z = 1
点的投影教案
点的投影教案引言:点的投影是几何学中重要的概念之一,它在建筑、制图和计算机图形学等领域都有广泛的应用。
点的投影不仅可以帮助我们理解空间中的几何关系,还可以在实际生活中起到实用的作用。
本教案将介绍点的投影的基本概念和性质,并结合实际例子进行讲解,以帮助学生更好地理解和应用点的投影。
一、什么是点的投影?点的投影是指将一个点投射到另一个平面上,并使投影点与原点与投影点在另一平面上的垂直距离最小。
在数学中,点的投影可以通过使用向量和矩阵等工具来进行计算和表示。
二、点的投影的性质1. 投影点存在唯一性:对于给定的点和平面,其投影点是唯一确定的。
这是因为平面上的垂直线只与一个点相交。
2. 投影点与原点直线的垂直性:投影点和原点之间的连线与平面垂直。
这可以通过平行四边形法则来证明。
3. 投影点与目标平面的距离:投影点到目标平面的距离与原点到目标平面的距离相等。
三、点的投影的实际应用1. 建筑设计:在建筑设计中,点的投影可以帮助设计师确定建筑物在不同角度和位置的投影,从而实现空间感的表达和建筑结构的合理布局。
2. 制图学:在制图学中,点的投影可以用于绘制二维图形的立体效果,使图形更加生动和立体感强。
3. 计算机图形学:在计算机图形学中,点的投影是实现三维模型渲染和图像生成的基础,通过计算点的投影可以实现逼真的图像呈现。
四、点的投影的计算方法1. 平行投影:当目标平面与原点所在的平面平行时,点的投影可以简化为平行投影。
平行投影可以通过矩阵变换来实现,其中平行投影矩阵是一个特殊的投影矩阵。
2. 透视投影:当目标平面与原点所在平面不平行时,点的投影需要进行透视投影计算。
透视投影可以通过坐标变换和追踪光线来实现,其中透视投影矩阵是一个非线性变换矩阵。
五、点的投影的练习题1. 已知点A(2, 3, 4)和平面P:x + 2y - 3z = 1,求点A在平面P上的投影点坐标。
2. 已知点B(1, -1, 2)和目标平面Q:2x - y + z = 3,求点B在目标平面Q上的投影点坐标。
直线的投影矩阵及其应用

一
、
直 线 的 投 影 矩 阵
情 一 知 线L 署 百 号 设 间 任 点M 形 已 直 : 一Y , 空 中 一 一
( ,Y , )在 L上 的 投 影 为 M ,如 图 ,直 线 L 的 方 向 向量
A
为 ,记 — B
C
。
一
,
即在 这 里 向量 都 写 成 列 向量 的
维普资讯
第 1 1卷第 2 期
汪 小 黎 :直 线 的投 影 矩 阵及 其 应 用
1 0 7 1 0 O O
5 9
的投影矩 阵 为 P 一
7 O 1 O
4 9 7
7 1
,
又 知 Ml( ,0 一 1 、M2( ,一 3 )分 别 为 L , 2 , ) 4 ,O
摘 要 介 绍 空 间解 析 几 何 中直 线 的投 影 矩 阵 ,并 给 出点 在 直 线 上 的 投 影 问 题 的统 一 解 法 及 求 两 异 面 直 线 直 线 ;投 影 矩 阵 ;投 影 点 坐 标 ;异 面 直 线 距 离 中图分类号 O 5 11
间距 离 的 简捷 方 法 关键 词
解 因 直 L 方 向 为 一{112 所 直 的 影 阵 P一 为 线 的 向 量 一,,) 以 线L 投 矩 为 吉 ,
[ 2 知 , 在L投标 [一 二 ] 点2 直上影为] 1 , , 线南坐[R 从 3 而 一 三 +]
5 2
又
5
2
,
即 求 影 标 一 , ,. 所 投 坐 为(导 5 1 )
1
2 .求 两 异 面 直 线 间 的 距 离
已知商异面直线 L ; l
一
一
投影矩阵、最小二乘法和SVD分解
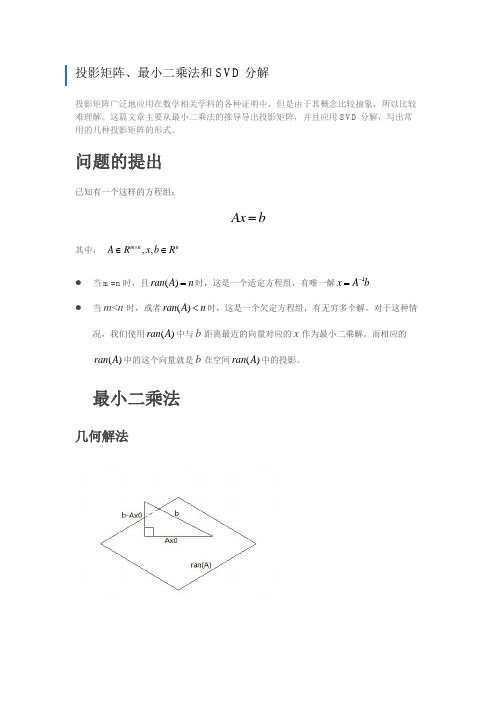
投影矩阵、最小二乘法和SVD 分解 投影矩阵广泛地应用在数学相关学科的各种证明中,但是由于其概念比较抽象,所以比较难理解。
这篇文章主要从最小二乘法的推导导出投影矩阵,并且应用SVD 分解,写出常用的几种投影矩阵的形式。
问题的提出 已知有一个这样的方程组: Ax b =
其中,,,m n n A R x b R ⨯∈∈
● 当m=n 时,且()ran A n =时,这是一个适定方程组,有唯一解1x A b -=
● 当m <n 时,或者()ran A n <时,这是一个欠定方程组,有无穷多个解。
对于这种情况,我们使用()ran A 中与b 距离最近的向量对应的x 作为最小二乘解。
而相应的()ran A 中的这个向量就是b 在空间()ran A 中的投影。
最小二乘法
几何解法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
江苏匡立柱
投影变换是六个基本变换之一,也是近年来高考考察的一个热点,但是教材4—2的第25页的介绍却很简单,特别是例5和例6只是简单指出⎢
⎣
⎡
1
1
⎥
⎦
⎤
和
⎢
⎣
⎡
-
2
1
2
1
⎥
⎦
⎤
-
2
1
2
1
是投影矩阵,这让学生很迷惑。
下面的例子将帮助学生走出迷惑。
例1、求与直线x
y=垂直的投影矩阵。
解法一:设平面内任意的一个点)
,
(
y
x
P,在投影矩阵的作用下得到的点)
,
(y
x
P'
'
',就是直线x
y=与过点P且与其垂直的直线)
(
x
x
y
y-
-
=
-的交点。
找到)
,
(
y
x
P和)
,
(y
x
P'
'
'两个点的关系,然后写成矩阵相乘的形式就得到了所求投影矩阵。
()
⎩
⎨
⎧
-'
-
=
-'
'
=
'
x
x
y
y
x
y
⎩
⎨
⎧
+
='
+
='
⇒
)
(
)
(
2
1
2
1
y
x
y
y
x
x
⎢
⎣
⎡
⇒
2
1
2
1
⎥
⎦
⎤
2
1
2
1
⎥
⎦
⎤
⎢
⎣
⎡
y
x
=⎥
⎦
⎤
⎢
⎣
⎡
'
'
y
x
,所求矩阵⎢
⎣
⎡
2
1
2
1
⎥
⎦
⎤
2
1
2
1点评:解法一也可以适用于“求与x轴垂直投影到直线x
y=的矩阵”,“求与y轴垂直投影到直线x
y=的矩阵”。
解法二:在与直线x
y=垂直的直线x
y-
=上取特殊点)1
,1(-,⎩
⎨
⎧
=
=
⇒
⎩
⎨
⎧
-
=
=
y
x
x
y
x
y
,设投影矩阵⎢
⎣
⎡
=
c
a
A⎥
⎦
⎤
d
b
,所以⎢
⎣
⎡
c
a
⎥
⎦
⎤
d
b
⎥
⎦
⎤
⎢
⎣
⎡
-1
1
=⎥
⎦
⎤
⎢
⎣
⎡
同理:在直线1
+
-
=x
y上特殊点)0,1(,
⎩
⎨
⎧
=
=
⇒
⎩
⎨
⎧
+
-
=
=
2
1
2
1
1y
x
x
y
x
y
,所以
⎢
⎣
⎡
c
a
⎥
⎦
⎤
d
b
⎥
⎦
⎤
⎢
⎣
⎡
1
=⎥
⎦
⎤
⎢
⎣
⎡
1
2
1
,
2
1
2
1,=
=c
a,0
,0=
-
=
-d
c
b
a,得到
2
1
2
1,=
=d
b,
所求矩阵⎢
⎣
⎡
2
1
1
⎥
⎦
⎤
2
1
1。
点评:解法二的两条直线选取有任意性,只要能得到两次矩阵变换,四个方程解出d
c
b
a,
,
,即可。
邮编222111
江苏省连云港市赣榆县海头高级中学匡立柱。