投影矩阵
投影矩阵的性质
投影矩阵的性质
1投影矩阵的概念
投影矩阵是一种线性变换,它将一个多维空间中的实矩阵线性映射到另一个多维空间中的投影矩阵。
投影矩阵有两个空间,即源空间和目标空间。
源空间是被映射的空间,即输入向量;而目标空间是映射得到的空间,即输出矩阵。
因此,投影矩阵可以说是一种将源空间中的信息转换为目标空间中信息的线性运算。
2投影矩阵的性质
1.投影矩阵是一种线性变换矩阵,它将一个多维空间中的数据映射到另一个多维空间中,从而把原来的信息表示投影到另一个空间中。
2.由于投影矩阵是一种线性变换,所以它具有结构完整性和转换关系的稳定性。
3.投影矩阵的维度大小和输入的特征和输入的向量的维度有关,一的维数越大,投影矩阵的维数也越多。
4.投影矩阵是矩阵,它是对角矩阵,对于对角线上元素,可以按照1/不等于1的比例进行归一化,也可以不归一化。
5.在图像变换方面,投影矩阵可以用来实现图像缩放、平移、旋转等功能。
6.投影矩阵的特性有单射性特性、可逆性特性和稳定性特性。
3投影矩阵的应用
1.投影矩阵可以用来解决多元线性回归问题,将一组特征数据映射到最佳的投影空间,从而获得最佳的线性拟合结果;
2.在机器学习方面,投影矩阵可以用来做特征抽取和特征选择,将原始特征空间映射到新特征空间,以便进行特征处理和数据可视化;
3.投影矩阵也可以用来作图像处理,通过把图像数据转换到新坐标空间,然后再进行后续图像处理;
4.投影矩阵还可以用来做数据可视化,让数据显示的在不同空间的变化,更加直观的展示给用户,从而更好的理解和分析数据。
投影矩阵 杠杆统计量
投影矩阵杠杆统计量?
答:投影矩阵和杠杆统计量在统计学和数据分析中具有重要意义。
投影矩阵是一种用于描述数据投影的矩阵,通常用于回归分析中。
在回归分析中,投影矩阵用于将解释变量(自变量)投影到响应变量(因变量)所张成的空间中。
具体来说,投影矩阵是一种将解释变量空间映射到响应变量空间的线性变换矩阵。
而杠杆统计量则是一种用于衡量每个观测值对回归分析的贡献的统计量。
在回归分析中,每个观测值都有一个对应的杠杆值,该值反映了该观测值对回归系数估计值的影响程度。
具体来说,杠杆统计量是每个观测值的自变量值与所有自变量值的均值之差的平方和与所有观测值的自变量值与均值之差的平方和的比值。
因此,投影矩阵和杠杆统计量在回归分析中具有重要的作用。
通过对投影矩阵和杠杆统计量的计算和分析,可以更好地理解解释变量与响应变量之间的关系,以及每个观测值对回归分析的贡献。
投影矩阵
一般的错切
后裁剪面 对象
前裁剪面 投影平面
顶视图和侧视图
θ φ
xp = x – z cot θ
yp = y – z cot φ
错切矩阵
xy 错切(z值不变)
⎡1 ⎢0 H(θ , φ ) = ⎢ ⎢0 ⎢ ⎣0 0 − cot θ 1 − cot φ 0 1 0 0 0⎤ 0⎥ ⎥ 0⎥ ⎥ 1⎦
称这个视景体为正则视景体(canonical view volume)
正交规范化
glOrtho(left, right, bottom, top, near, far) 规范化 ⇒ 求出把指定裁剪体转化为默认裁剪体的变换 (right, top, −far) (1, 1, −1)
(left, bottom, −near)
• •
这些变换都是非奇异的 默认值为单位阵(正交视图)
规范化使得不管投影的类型是什么,都是相对 于默认的简单立方体进行裁剪 能的保留深度信息,这对隐藏面消除是非 常重要的
正则视景体
OpenGL缺省的视景体是中心在原点,边长 为2的立方体,相当于调用
glMatrixMode(GL_PROJECTION); glLoadIdentity(); glOrtho(-1.0, 1.0, -1.0, 1.0, -1.0, 1.0);
OpenGL的透视
glFrustum可以定义非对称视景体,但 gluPerspective不能做到这一点
OpenGL透视矩阵
glFrustum的规范化
• 剪切变换H:把非对称视景棱台变换为对称的 • •
四棱台,远近平面不变 缩放变换S:把四棱台的侧面变换为x= ±z和y= ±z,远近平面不变 透视规范化变换N: x= ±z变换为x= ±1, y= ±z变换为y= ±1,近平面z=-near变换为z=-1, 远平面z=-far变换为z = 1
透视投影变换矩阵
最终的最对于任意点并且投影平面的方也是任意的的透视投影变换矩阵
P=T逆P’T
*矩阵乘顺序不可交换
方法二(直接直线和面的交点): 视点(xe,ye,ze)空间一点p(x,y,z)在平面上的投影p’=(x',y',z')=t(x,y,z); 平面ax+by+cz+d=0; 把p‘代入 得到t的值;再把t带入参数方程获得p';最终整理得透视投影矩阵P
P=
请求出错错误代码400请尝试刷新页面重试
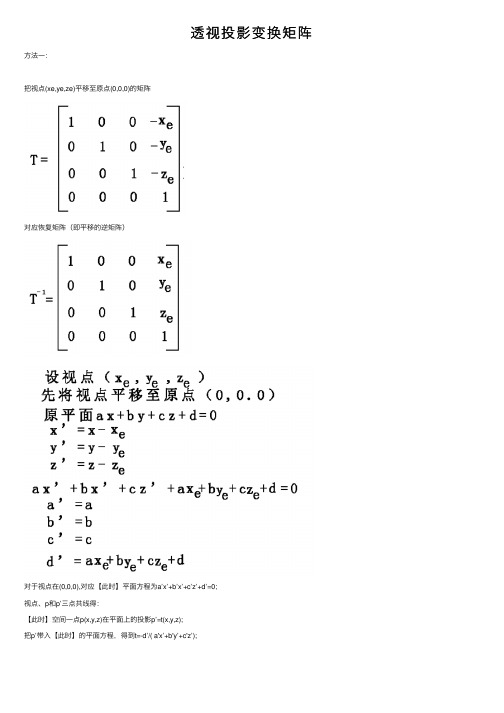
方法一: 把视点(xe,ye,ze)平移至原点(0,0,0)的矩阵
透视投影变换矩阵
对应恢复矩阵(即平移的逆矩阵)
对于视点在(0,0,0),对应【此时】平面方程为a’x’+b’x’+c’z’+d’=0; 视点、p和p’三点共线得: 【此时】空间一点p(x,y,z)在平面上的投影p’=t(x,y,z); 把p’带入【此时】的平面方程,得到t=-d’/( a'x’+b'y’+c'z’);
投影矩阵、最小二乘法和SVD分解
投影矩阵、最小二乘法和SVD 分解 投影矩阵广泛地应用在数学相关学科的各种证明中,但是由于其概念比较抽象,所以比较难理解。
这篇文章主要从最小二乘法的推导导出投影矩阵,并且应用SVD 分解,写出常用的几种投影矩阵的形式。
问题的提出 已知有一个这样的方程组: Ax b =
其中,,,m n n A R x b R ⨯∈∈
● 当m=n 时,且()ran A n =时,这是一个适定方程组,有唯一解1x A b -=
● 当m <n 时,或者()ran A n <时,这是一个欠定方程组,有无穷多个解。
对于这种情况,我们使用()ran A 中与b 距离最近的向量对应的x 作为最小二乘解。
而相应的()ran A 中的这个向量就是b 在空间()ran A 中的投影。
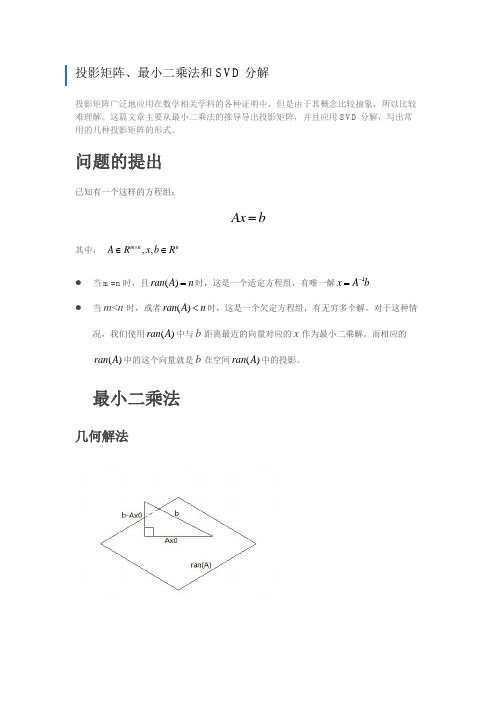
最小二乘法
几何解法。
OpenGL投影矩阵(ProjectionMatrix)构造方法
OpenGL投影矩阵(ProjectionMatrix)构造⽅法(翻译,图⽚也来⾃)⼀、概述绝⼤部分计算机的显⽰器是⼆维的(a 2D surface)。
在OpenGL中⼀个3D场景需要被投影到屏幕上成为⼀个2D图像(image)。
这称为投影变换(参见或),需要⽤到投影矩阵(projection matrix)。
⾸先,投影矩阵会把所有顶点坐标从eye coordinates(观察空间,eye space或view space)变换到裁剪坐标(clip coordinated,属于裁剪空间,clip space)。
然后,这些裁剪坐标被变换到标准化设备坐标(normalized device coordinates, NDC,即坐标范围在-1到1之间),这⼀步是通过⽤⽤裁剪坐标的w_c分量除裁剪坐标实现的。
因此,我们要记住投影矩阵⼲了两件事: 裁剪clipping(即frustum culling,视景体剔除)和⽣成NDC。
下⽂会讲述如何根据6个参数(left, right, bottom, top, near和far边界值)来构建投影矩阵。
注意视景体剔出(也即clipping)是在裁剪坐标下完成的,是早于⽤w_c(即上⾯提到的w分量,c表⽰clipping)除裁剪坐标的(它会⽣成NDC)。
裁剪坐标x_c, y_c, z_c会与w_c进⾏⽐较。
如果裁剪坐标⽐-w_c⼩或者⽐w_c⼤,则丢弃这个顶点(vertex)。
即经裁剪后剩余的顶点的裁剪坐标满⾜:-w_c < x_c, y_c, z_c < w_c。
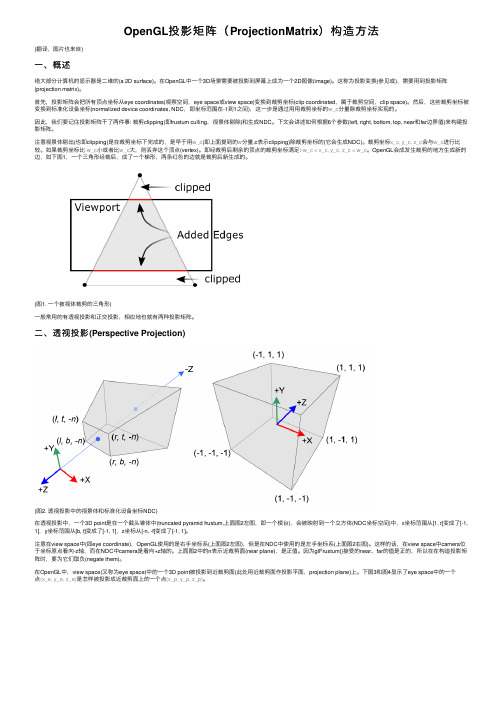
OpenGL会成发⽣裁剪的地⽅⽣成新的边,如下图1,⼀个三⾓形经裁后,成了⼀个梯形,两条红⾊的边就是裁剪后新⽣成的。
(图1. ⼀个被视体裁剪的三⾓形)⼀般常⽤的有透视投影和正交投影,相应地也就有两种投影矩阵。
⼆、透视投影(Perspective Projection)(图2. 透视投影中的视景体和标准化设备坐标NDC)在透视投影中,⼀个3D point是在⼀个截头锥体中(truncated pyramid frustum,上⾯图2左图,即⼀个棱台),会被映射到⼀个⽴⽅体(NDC坐标空间)中,x坐标范围从[1, r]变成了[-1, 1],y坐标范围从[b, t]变成了[-1, 1],z坐标从[-n, -f]变成了[-1, 1]。
正交投影矩阵的特征值_解释说明以及概述
正交投影矩阵的特征值解释说明以及概述1. 引言1.1 概述正交投影矩阵是在三维几何中广泛应用的重要概念。
它通过将三维空间中的点映射到二维平面上,实现了几何对象在屏幕上的显示和处理。
正交投影矩阵的特征值是对该矩阵进行分析和解释时的关键指标。
本文将深入探讨正交投影矩阵的特征值,旨在帮助读者全面理解和应用正交投影矩阵。
1.2 文章结构本文将按以下结构展开讨论:- 引言:概述文章主题和结构;- 正交投影矩阵的特征值:定义、概念和性质;- 正交投影矩阵的特征值解释说明:详细解释特征值在几何学中的意义;- 正交投影矩阵的特征值计算方法:介绍常用计算方法、数值计算注意事项及优化方法;- 正交投影矩阵的特征值应用案例研究:背景介绍、目标与方法论概述、实验结果及数据分析讨论;- 结论与展望:对本文主要内容进行总结,并展望未来研究方向。
1.3 目的本文的目的在于:- 对正交投影矩阵的特征值进行详细解释和说明,使读者能够全面理解特征值在几何学中的应用;- 提供常用的正交投影矩阵特征值计算方法并介绍数值计算注意事项及优化方法,帮助读者在实际应用中更准确地计算特征值;- 运用实际案例展示正交投影矩阵特征值的应用场景和深入分析实验结果,为读者提供实操经验;- 总结全文,并对未来进一步研究方向进行展望,为相关领域的学者提供参考。
2. 正交投影矩阵的特征值2.1 正交投影矩阵的定义正交投影矩阵是指一个方阵,其满足以下两个条件:首先,它是一个正交矩阵,也就是说该矩阵的转置乘以它自身等于单位矩阵;其次,它是一个投影矩阵,即该矩阵平方等于它自身。
2.2 特征值的概念和性质在线性代数中,对于一个n×n的方阵A, 如果存在一个非零向量v使得Av=λv,其中λ为实数,则称λ为A的特征值,v称为对应于特征值λ的特征向量。
特征值和特征向量揭示了方阵变换行为中的重要信息。
一些常见的特征值性质包括:每个方阵都有特征值;方阵乘积的特征值与因子方阵的特征值相关;主对角线元素之和等于矩阵所有特征值之和。
正交投影矩阵(orthogonalprojectionmatrix)
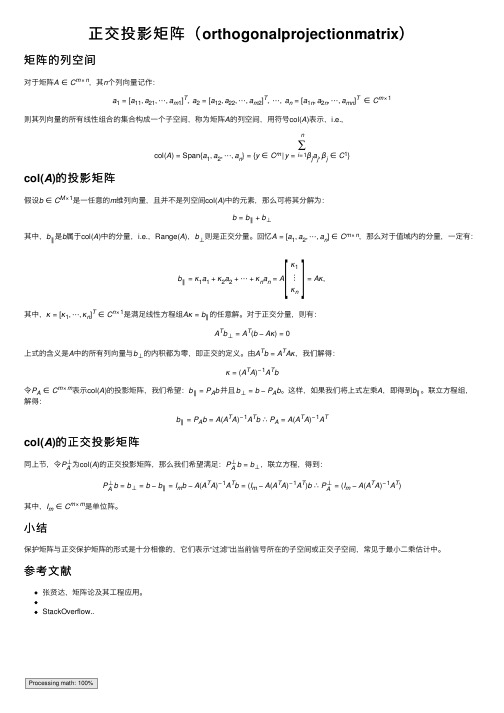
正交投影矩阵(orthogonalprojectionmatrix)矩阵的列空间对于矩阵A∈C m×n,其n个列向量记作:a1=[a11,a21,⋯,a m1]T,a2=[a12,a22,⋯,a m2]T,⋯,a n=[a1n,a2n,⋯,a mn]T∈C m×1则其列向量的所有线性组合的集合构成⼀个⼦空间,称为矩阵A的列空间,⽤符号col(A)表⽰,i.e.,col(A)=Span{a1,a2,⋯,a n}={y∈C m|y=n∑i=1βj a j,βj∈C1}col(A)的投影矩阵假设b∈C M×1是⼀任意的m维列向量,且并不是列空间col(A)中的元素,那么可将其分解为:b=b∥+b⊥其中,b∥是b属于col(A)中的分量,i.e.,Range(A),b⊥则是正交分量。
回忆A=[a1,a2,⋯,a n]∈C m×n,那么对于值域内的分量,⼀定有:b∥=κ1a1+κ2a2+⋯+κn a n=A κ1⋮κn=Aκ,其中,κ=[κ1,⋯,κn]T∈C n×1是满⾜线性⽅程组Aκ=b∥的任意解。
对于正交分量,则有:A T b⊥=A T(b−Aκ)=0上式的含义是A中的所有列向量与b⊥的内积都为零,即正交的定义。
由A T b=A T Aκ,我们解得:κ=(A T A)−1A T b令P A∈C m×m表⽰col(A)的投影矩阵,我们希望:b∥=P A b并且b⊥=b−P A b。
这样,如果我们将上式左乘A,即得到b∥。
联⽴⽅程组,解得:b∥=P A b=A(A T A)−1A T b∴P A=A(A T A)−1A Tcol(A)的正交投影矩阵同上节,令P⊥A为col(A)的正交投影矩阵,那么我们希望满⾜:P⊥A b=b⊥,联⽴⽅程,得到:P⊥A b=b⊥=b−b∥=I m b−A(A T A)−1A T b=(I m−A(A T A)−1A T)b∴P⊥A=(I m−A(A T A)−1A T)其中,I m∈C m×m是单位阵。
projinv用法matlab
projinv用法matlab1.简介在M AT LA B中,p ro ji n v是一个非常有用的函数,用于计算投影矩阵的逆。
在此文档中,我们将深入了解p roj i nv函数的使用方法和相关注意事项。
2.什么是投影矩阵?在计算机图形学和计算机视觉领域,投影矩阵是一种将三维世界中的点映射到二维平面上的变换矩阵。
它是进行透视变换和投影的关键工具。
3.使用projin v 函数在M AT LA B中,使用p r oj in v函数非常简单。
以下是基本的函数调用格式:```m at la bi n v_ma tr ix=p ro jin v(m at ri x)```其中,`ma tr ix`是一个投影矩阵,`inv_ma tr ix`是它的逆矩阵。
4.示例为了更好地理解p roj i nv函数的使用,我们将通过以下示例演示其工作原理。
```m at la b%创建一个投影矩阵m a tr ix=[100;010;001];%计算投影矩阵的逆矩阵i n v_ma tr ix=p ro jin v(m at ri x);```在上面的示例中,我们创建了一个简单的投影矩阵,并使用pr o ji nv函数计算了其逆矩阵。
现在,`i nv_m at ri x`将包含投影矩阵的逆。
5.注意事项在使用p ro ji nv函数时,需要注意以下几点:-输入矩阵必须是投影矩阵。
如果输入的矩阵不是投影矩阵,将会导致错误的计算结果。
-输出的逆矩阵是一个投影矩阵的逆矩阵。
请注意,投影矩阵的逆不一定是一个投影矩阵。
-如果投影矩阵不可逆,该函数将会抛出一个错误。
6.总结p r oj in v是MA TL AB中一个非常有用的函数,用于计算投影矩阵的逆。
在本文档中,我们简要介绍了pr oj in v函数的使用方法,以及使用示例和注意事项。
希望这些信息对你在MA TL AB中使用pr oj in v函数时有所帮助。
*至此,关于p r o j in v函数的简单介绍和使用方法就结束了。
斜平行投影变换矩阵推导

斜平行投影变换矩阵推导斜平行投影是一种特殊的投影方式,它将三维物体投影到二维平面上。
在斜平行投影中,投影线与投影平面呈一定的角度,而不是完全垂直。
这种投影方式在许多领域都有应用,例如建筑设计、动画制作和虚拟现实等。
为了推导斜平行投影的变换矩阵,我们首先需要了解一些基本概念和公式。
在三维空间中,一个点的坐标可以表示为 (x, y, z)。
在二维平面上,一个点的坐标可以表示为 (x', y')。
斜平行投影的变换矩阵可以将三维坐标转换为二维坐标。
假设投影平面与x轴之间的角度为θ,那么变换矩阵可以表示为:(T = \begin{bmatrix}\cos\theta & -\sin\theta & 0 \\sin\theta & \cos\theta & 0 \0 & 0 & 1\end{bmatrix})这个矩阵将三维坐标 (x, y, z) 转换为二维坐标 (x', y'),其中 x' 和 y' 分别表示在投影平面上的横向和纵向坐标。
接下来,我们可以通过矩阵乘法来计算二维坐标。
假设三维坐标为 (x, y, z),则可以通过以下公式计算二维坐标:(T \cdot \begin{bmatrix}x \y \z \\end{bmatrix} = \begin{bmatrix}x' \y' \z' \\end{bmatrix})其中 (z' = z)。
通过矩阵乘法,我们可以得到:(x' = x \cos\theta - y \sin\theta)(y' = x \sin\theta + y \cos\theta)(z' = z)这样,我们就得到了斜平行投影的变换矩阵和对应的坐标变换公式。
正交投影矩阵公式
正交投影矩阵公式正交投影矩阵公式是一种常用的数学计算公式,它可以将投影空间中的一组点映射到另一组点上,并使其保持其形状和大小不变。
它可以帮助我们在几何和图像处理中实现许多有趣的功能,例如,它可以将一个投影空间中的点映射到另一个投影空间中,以及将一个投影空间中的点映射到另一个投影空间中。
正交投影矩阵公式定义如下:P=A(A^T)^-1A^T其中,A为一个m*n矩阵,m为投影空间的维度,n为点的维度,P为一个m*n矩阵,用于描述将空间中点映射到另一个投影空间中的转换关系。
正交投影矩阵公式可以用来实现多种功能,例如,它可以用来实现投影空间的缩放、平移、旋转和镜像等变换。
此外,它还可以用来实现图像处理中的图像缩放、图像平移、图像旋转和图像镜像等功能。
正交投影矩阵公式的特点是,它具有非常简单的算法,可以快速实现投影空间的变换。
另外,它还具有可扩展性,可以根据空间变换的需求来调整参数,以达到最佳的效果。
正交投影矩阵公式在几何和图像处理领域中非常常用,它可以帮助我们实现几何和图像处理中的多种功能。
因此,正交投影矩阵公式非常重要,我们可以借助它来实现投影空间的变换,以及图像处理中的图像缩放、图像平移、图像旋转和图像镜像等功能。
此外,正交投影矩阵公式还可以用于计算投影空间中的点之间的距离,从而实现有效的空间变换。
例如,我们可以使用正交投影矩阵公式计算空间中的点之间的距离,从而实现投影空间的缩放、平移、旋转和镜像变换。
总之,正交投影矩阵公式是一种重要的数学计算公式,它可以帮助我们实现投影空间的缩放、平移、旋转和镜像变换,以及图像处理中的图像缩放、图像平移、图像旋转和图像镜像等功能。
正交投影矩阵公式的使用方法简单,可扩展性强,具有很多优点,因此,它在几何和图像处理领域中有着重要的应用价值。
D3D,OPENGL视点变换矩阵,投影矩阵(clip space)的推导过程
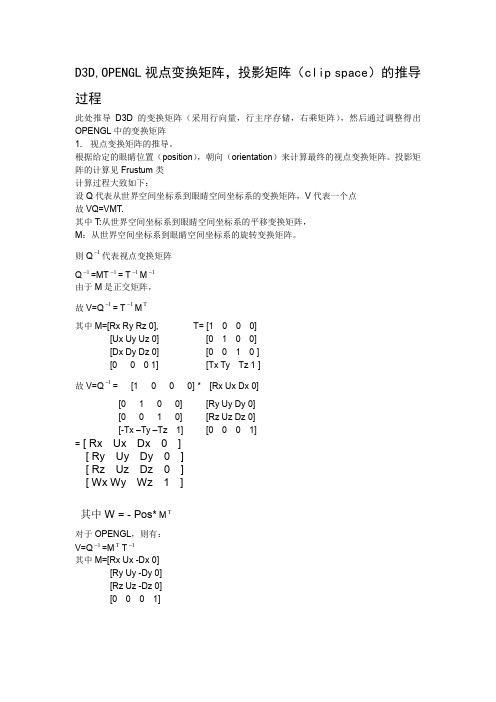
D3D,OPENGL视点变换矩阵,投影矩阵(clip space)的推导过程此处推导D3D的变换矩阵(采用行向量,行主序存储,右乘矩阵),然后通过调整得出OPENGL中的变换矩阵1. 视点变换矩阵的推导。
根据给定的眼睛位置(position),朝向(orientation)来计算最终的视点变换矩阵。
投影矩阵的计算见Frustum类计算过程大致如下:设Q代表从世界空间坐标系到眼睛空间坐标系的变换矩阵,V代表一个点故VQ=VMT.其中T:从世界空间坐标系到眼睛空间坐标系的平移变换矩阵,M:从世界空间坐标系到眼睛空间坐标系的旋转变换矩阵。
则Q1-代表视点变换矩阵Q1-=MT1-= T1-M1-由于M是正交矩阵,故V=Q1-= T1-M T其中M=[Rx Ry Rz 0], T= [1 0 0 0][Ux Uy Uz 0] [0 1 0 0][Dx Dy Dz 0] [0 0 1 0 ][0 0 0 1] [Tx Ty Tz 1 ]故V=Q1-= [1 0 0 0] * [Rx Ux Dx 0][0 1 0 0] [Ry Uy Dy 0][0 0 1 0] [Rz Uz Dz 0][-Tx –Ty –Tz 1] [0 0 0 1]= [ Rx Ux Dx 0 ][ Ry Uy Dy 0 ][ Rz Uz Dz 0 ][ Wx Wy Wz 1 ]其中W = - Pos* M T对于OPENGL,则有:V=Q1-=M T T1-其中M=[Rx Ux -Dx 0][Ry Uy -Dy 0][Rz Uz -Dz 0][0 0 0 1]T= [1 0 0 Tx][ 0 1 0 Ty][0 0 1 Tz][0 0 0 1 ]故V=Q1 =[Rx Ry Rz Wx][Ux Uy Uz Wy][-Dx –Dy –Dz Wz][0 0 0 1]其中W = -M T* Pos2. 透视投影(perspective projection)矩阵的推导假设(X,Y,Z,1)为一个点,投影后的点为(Xp,Yp,Zp,1)则根据相似三角形原理,有:Xp/X=Yp/Y=N/Z所以:Xp=N*X/ZYp=N*Y/ZZp=N故投影变换可以表示为齐次坐标形式:(Xp,Yp,Zp,1)=(X,Y,Z,Z/N)对于X和Y :在进行上一步变换后,还要进一步做裁剪变换,即将投影后的坐标映射为[-1,1].即:(X*N/Z,Y*N/Z) : ([l,r],[b,t]) ([-1,1],[-1,1])即:(X*N/Z-l)/(r-l)=(s+1)/2由此可以得到:对于Z,变换稍微复杂一些。
投影矩阵的充要条件
投影矩阵的充要条件投影矩阵是线性代数中一个重要的概念,它在计算机图形学、机器学习等领域有着广泛的应用。
在理解投影矩阵的性质和特点时,我们需要了解它的充要条件。
一、什么是投影矩阵投影矩阵是一个方阵,它可以将一个向量投影到一个低维的子空间上。
具体来说,对于一个n维向量空间V中的向量x,如果存在一个n×n的矩阵P,使得Px=x,那么矩阵P就是一个投影矩阵。
二、投影矩阵的性质1. 幂等性:投影矩阵的平方等于它本身,即P²=P。
这是因为对于任意向量x,Px再次投影到子空间上仍然等于x。
2. 对称性:投影矩阵是对称矩阵,即P^T=P。
这是因为对于任意向量x和y,有x^TPy=y^TPx,即x和y的投影结果相同。
3. 特征值:投影矩阵的特征值只能是0或1。
证明如下:设P是一个投影矩阵,λ是它的特征值,v是对应于λ的特征向量。
则有Pv=λv。
由于P是幂等矩阵,有P²=P,所以Pv=P²v=P(Pv)=P(λv)=λPv=λ²v。
由于v不为零,所以λ²=λ,即λ=0或1。
三、投影矩阵的充要条件可以通过其性质来推导得出。
设P是一个n×n的矩阵,满足P²=P,P^T=P,且所有特征值都是0或1。
我们需要证明P是一个投影矩阵。
首先,由于P是对称矩阵,可以对它进行对角化,即存在一个正交矩阵Q和一个对角矩阵D,使得P=QDQ^T。
由于P是幂等矩阵,有P²=P,即(QDQ^T)²=QDQ^T。
展开得到QD²Q^T=QDQ^T,即D²=D。
由于D是对角矩阵,所以D的对角元素只能是0或1。
因此,P的特征值只能是0或1。
其次,我们需要证明P满足Px=x。
对于任意向量x,有Px=QDQ^Tx=QD(Q^Tx)。
由于D是对角矩阵,所以Q^Tx是一个向量,记作y。
则有Px=QDy=Q(Dy)=Q(Dy)=Qy=x。
因此,P满足Px=x。
第六章 广义逆矩阵

1.定义:设L是Cn的子空间,则称沿着L⊥到L的投影算子 定义: 定义 PL,L⊥为正交投影算子,简记为PL;正交投影算子在Cn 的基e1,…,en下的矩阵称为正交投影矩阵,记为PL . 2. 定理 矩阵P为正交投影矩阵的充要条件是P为幂等 Hermite矩阵.
3. 正交投影矩阵 L的构造方法 正交投影矩阵P
设 dimL=r , 则 dimL⊥=n-r . 在 子 空 间 L 和 L⊥ 中 分 别 取 基 底 X=(x1,…,xr)和Y=(y1,…,yn-r) 满足 XHY=Or×(n--r),于是
( X H X ) 1 X H PL = [ X , O][ X , Y ]1 = [ X , O] H 1 H (Y Y ) Y = X ( X H X ) 1 X H A 1 说明:令 [ X , Y ] = ,则有 B
定理二:设矩阵A给定,则A+满足如下性质 定理二:设矩阵 给定, 给定
1. 2. 3. 4. 5. 6.
rank A+=rank A (A+)+=A (AH)+=(A+)H, (AT)+=(A+)T (AHA)+=A+(AH)+, (AAH)+=(AH)+A+ A+=(AHA)+AH=AH(AAH)+ R(A+)=R(AH), N(A+)=N(AH)
A I = [ X , Y ][ X , Y ] = [ X , Y ] = XA + YB B X H = X H XA + X H YB = ( X H X ) A 两边左乘 XH 得
投影矩阵

视锥就是场景中的一个三维空间,它的位置由视口的摄像机来决定。
这个空间的形状决定了摄像机空间中的模型将被如何投影到屏幕上。
透视投影是最常用的一种投影类型,使用这种投影,会使近处的对象看起来比远处的大一些。
对于透视投影,视锥可以被初始化成金字塔形,将摄像机放在顶端。
这个金字塔再经过前、后两个剪切面的分割,位于这两个面之间的部分就是视锥。
只有位于视锥内的对象才可见。
视锥由凹视野(在上图中,变量投影矩阵是一个典型的缩放和透视矩阵。
投影变换将视锥变换成一个直平行六面体的形状。
因为视锥的近处比远处小,这样就会对靠近摄像机的对象起到放大的作用,也就将透视应用到了场景当中。
在视锥中,摄像机与空间原点间的距离被定义为变量视矩阵将摄像机放置在场景的原点。
又因为投影矩阵需要将摄像机放在将两个矩阵相乘,得到下面的矩阵:下图显示了透视变换如何将一个视锥变换成一个新的坐标空间。
注意:锥形体变成了直平行六面体,原点从场景的右上角移到了中心。
在透视变换中,这个矩阵基于一定的距离(这个距离是从摄像机到邻近的剪切面)对对象进行平移和旋转,但是它没有考虑到视野(在这个矩阵中,在程序中,使用视野角度来定义x和y缩放系数比使用视口的水平和垂直尺寸(在摄像机空间中)并不方便多少。
下面两式使用了视口的尺寸,并且与上面的公式相等:在这些公式中,Zn表示邻近的剪切面的位置,变量Vw和Vh表示视口的高和宽。
这两个参数与D3DVIEWPORT2结构中的dwWidth和dwHeight成员相关。
不管你使用那个公式,将同世界和视变换一样,可以调用下面的D3DMATRIX ProjectionMatrix(const float near_plane,// distance to near clipping planeconst float far_plane,// distance to far clipping planeconst float fov_horiz,// horizontal field of view angle, in radiansconst float fov_vert)// vertical field of view angle, in radians {float h, w, Q;w = (float)cot(fov_horiz*0.5);h = (float)cot(fov_vert*0.5);Q = far_plane/(far_plane - near_plane);D3DMATRIX ret = ZeroMatrix();ret(0, 0) = w;ret(1, 1) = h;ret(2, 2) = Q;ret(3, 2) = -Q*near_plane;ret(2, 3) = 1;return ret;} // end of ProjectionMatrix()一旦创建完了矩阵,你需要调用一个顶点经过世界、观察和投影变换之后,下图展示了一个不适合的投影矩阵,和一个经过缩放的适合的矩阵:在前面的矩阵中,所有的变量都被假定为非零。
透视投影矩阵的推导

透视投影矩阵的推导视锥体如图,近截⾯与远截⾯之间构成的这个四棱台就是视锥体,⽽透视投影矩阵的任务就是把位于视锥体内的物体的顶点X,Y,Z坐标映射到[-1,1]范围。
这就相当于把这个四棱台扭曲变形成⼀个⽴⽅体。
这个⽴⽅体叫做规则观察体 (Canonical View Volume, CVV)。
如下图:变换⽅法或规则:如下图,有⼀点P,位于视锥体内,设坐标为(x,y,z).分别对x,y坐标和z坐标的变换到[-1,1]的⽅式进⾏讨论:1.x,y坐标的变换⽅式:(1)连接视点eye与P点与近裁剪⾯交于P’点(2)设近裁剪⾯的宽度为W,⾼度为H,P’点的x坐标范围是[-W/2,W/2],y坐标范围是[-H/2,H/2],然后分别线性映射⾄[-1,1]内即可。
2.z坐标的变换⽅式z坐标的范围是N⾄F,需要映射到[-1,1],映射⽅法暂时按下,不做想法。
透视投影函数形式void Matrix4X4::initPersProjMatrix(float FOV, const float aspect, float zNear, float zFar) 透视投影矩阵构建函数的参数:Fov:纵向的视⾓⼤⼩aspect:裁剪⾯的宽⾼⽐zNear:近裁剪⾯离摄像机的距离,图中的nzFar:远裁剪⾯离摄像机的距离,图中的f通过这⼏个参数和三⾓函数的数学知识可以求得近裁剪⾯的⾼度,参考上图:求得点P在近裁剪⾯的投影点P’的坐标根据相似三⾓形对应边长度的⽐率相同,由图可得其中x’,y’的范围沿原点对称,只要将他们分别除以W/2,H/2,即可以使范围位于[-1,1]内。
前⾯已求得W,H,因此:假设我们最后需要的坐标点P’’即是推导矩阵然后为了⾃动化的得到这个结果,我们使⽤矩阵这种数学⼯具,将⼀个矩阵乘以⼀个向量,得到⼀个新的向量,使得我们所有的运算步骤和运算数据蕴藏在矩阵和乘法中。
下⾯的⼯作就是寻找到⼀个矩阵使得:我们发现求解很难找出合适的m00、m02,因为左边x和z是以加法的形式相邻,右边z确成为了x的分母。
线性代数笔记18投影矩阵和最小二乘
线性代数笔记18投影矩阵和最小二乘线性代数笔记18——投影矩阵和最小二乘 - 我是8位的 - 博客园一维空间的投影矩阵先来看一维空间内向量的投影:向量p是b在a上的投影,也称为b在a上的分量,可以用b乘以a方向的单位向量来计算,现在,我们打算尝试用更“贴近”线性代数的方式表达。
因为p趴在a上,所以p实际上是a的一个子空间,可以将它看作a放缩x倍,因此向量p可以用p = xa来表示,只要找出x就可以了。
因为a⊥e,所以二者的点积为0:我们希望化简这个式子从而得出x:x是一个实数,进一步得到x:a T b和a T a都是点积运算,最后将得到一个标量数字。
这里需要抑制住消去a T的冲动,向量是不能简单消去的,a和b 都是2×1矩阵,矩阵的运算不满足乘法交换律,a T无法先和1/a T计算。
现在可以写出向量p的表达式,这里的x是个标量:这就是b在a上的投影了,它表明,当b放缩时,p也放缩相同的倍数;a放缩时,p保持不变。
由于向量点积a T a是一个数字,p可以进一步写成:在一维空间中,分子是一个2×2矩阵,这说明向量b的在a上的投影p是一个矩阵作用在b上得到的,这个矩阵就叫做投影矩阵(Projection Matrix),用大写的P表达:推广到n维空间,a是n维向量,投影矩阵就是n×n的方阵。
观察投影矩阵会法发现,它是由一个列向量乘以一个行向量得到的:可以看出aa T的列向量是线性相关的,所以它的列空间和行空间的维度都是1,这说明它的秩是1,aa T是一个秩一矩阵,并且是一个对称矩阵。
由于a T a是一个标量,所以aa T决定了投影矩阵的性质:投影矩阵还有另外一个性质:它的几何意义是,对一个向量投影两次和投影一次相同,b在a上的投影是p,再投影一次仍然是p。
向量投影到子空间有什么意义呢?这要从方程Ax = b说起。
对于Ax = b来说,并不是任何时候都有解,实际上大多数这种类型的方程都无解。
opencv 投影矩阵计算公式
opencv 投影矩阵计算公式
OpenCV中的投影矩阵计算涉及到相机标定和摄像机姿态估计等内容。
投影矩阵通常是指相机的内参矩阵和外参矩阵的组合,用于将三维空间中的点投影到二维图像平面上。
在OpenCV中,投影矩阵通常由相机内参矩阵和旋转矩阵、平移向量组成。
投影矩阵的计算公式可以通过相机标定和摄像机姿态估计的方法得到。
在相机标定中,常用的方法是利用棋盘格等已知模式的图像来计算相机的内参矩阵,包括焦距、主点坐标和畸变参数等。
而外参矩阵则涉及到相机的旋转矩阵和平移向量,可以通过摄像机姿态估计的方法来获取。
在OpenCV中,可以使用`cv2.calibrateCamera`函数进行相机标定,该函数会返回相机的内参矩阵以及畸变参数。
而对于摄像机姿态估计,可以使用`cv2.solvePnP`函数来估计物体在相机坐标系中的姿态,进而得到相机的旋转矩阵和平移向量。
综上所述,投影矩阵的计算公式涉及到相机的内参矩阵、旋转矩阵和平移向量,可以通过相机标定和摄像机姿态估计的方法来获
取。
这些方法在OpenCV中都有相应的实现函数,可以方便地进行相机标定和姿态估计,进而得到投影矩阵。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
22
投影矩阵
P =NSH =
2zmin
xm
ax
xm
in
0
0
0
0
2 z m in ymax ymin
0 0
xmax xmin
xmax xmin ymax ymin
ymax ymin far near
far near 1
0
0
2far
near
far near
投影矩阵P = STH把原来的裁剪体 变换为默认的裁剪体
DOP
对象
远面
近面
裁剪体
顶视图 x = -1
z= 1
DOP
x=1 z = -1
变形后的对象
14
简单透视
考虑简单透视:COP在原点,近裁剪面 在z = -1,由平面x = ± z, y = ±z确定的 有90度的视野
15
透视矩阵
齐次坐标下的简单投影矩阵为
0
23
为何采取这种方法?
规范化使得只需要一个流水线体系 就可以进行透视投影和正交投影
尽可能位于四维齐次空间中,以便 保持隐藏而消除和明暗处理所需要 的三维信息
简化了裁剪的操作
24
20
OpenGL 的透视
glFrustum 可以定义非对称视景体, 但 gluPerspective 不能做到
21
OpenGL 透视矩阵
在glFrustum中的规范化需要进行一 个初始剪切变换,从而形成一个视 景棱台,接着进行放缩变换,得到 规范后的透视视景体。最后,透视 矩阵导致只需要最后的正交变换:
倾斜投影= 剪切+正交投影
10
一般的剪切
顶视图
侧视图
11
剪切矩阵
xy 剪切 (z 值不变)
1 0 cotθ 0 H(q,f) = 0 1 cotφ 0
0 0 1 0 0 0 0 1
投影矩阵 P = Morth H(q,f)
一般情形 P = Morth STH(q,f)
12
等价性
13
对裁剪体的影响
这种策略可以使我们在流水线中应 用标准变换,并进行有效的裁剪
4
流水线
模型对于默认立方体
投影 3D 2D
5
注释
在模型-视图变换和投影变换的过程中, 我们是一直在四维齐次坐标中的
– 默认值为单位阵(正交视图)
规范化使得不管投影的类型是什么,都 是相对于默认的简单立方体进行裁剪
17
a 与b的选取
如果取
a = near far far near 2near far
b=
near far
那么近平面映射到 z = -1 远平面映射到 z =1 各侧边映射到 x = 1, y = 1
18
规范变换
变形后的对象
原来的 裁剪体
原来的 对象
变换后的 裁剪体
19
规范化与隐藏面消除
far near
far near
1
8
最后的投影
令 z =0 等价于如下的齐次坐标变换
1 0 0 0
Morth =
0 0
1 0
0 0
0 0
0 0 0 1
从而在4D中一般的正交投影为
P = MorthST
9
倾斜投影
OpenGL的投影函数不支持一般的 平行投影,例如立方体的如下图示
此时立方体好像发生了剪切,然后 再进行正交投影
计算机图形学
杨武
影像科学与技术实验室 东南大学计算机学院 yangwu@
第五章之第三节
投影矩阵
2
基本内容
推导出在标准OpenGL投影中所用 的投影矩阵具体表示
介绍倾斜投影 介绍投影规范化
3
规范化
不想为每种类型的投影设计不同的 投影矩阵,所以把所有的投影转化 为具有默认视景体的正交投影
1 0 0 0 M = 0 1 0 0
0 0 1 0 0 0 1 0
注意这个矩阵与远裁剪面无关
16
推广
1 0 0 0 0 1 0 0 N = 0 0 α β 0 0 1 0
透视除法后,点 (x, y, z, 1) 变到了
x’ = -x/z , y’ = -y/z ,Z’ = -(a+b/z)
无论α, β的值是什么,在正交透影后就得到所 期望的点。此时矩阵N非奇异
– 进行放缩从而使视景体的边长为2
S(2/(left-right),2/(top-bottom),2/(near-far))
P = ST =
2
right
lef
t
0
0
0
0 2 top bottom 0 0
0
0 2 near far 0
torriipgghhttbotllteeoffmtt
top bottom
虽然这里选择的透视矩阵形式上看起来有 点儿任意,但这种选择保证如果在原来的 裁剪体内z1>z2, 那么变换后的点满足 z1’>z2’
因此如果首先应用规范变化,隐藏面消除 算法有效
然而,公式z’ = -(α+β/z)意味着由于规范化 导致距离发生了改变,这可能导致数值问 题,特别是当近距离非常小的时候更是如 此
投影直到最后时刻才进行
– 从而可以尽可能的保留深度信息,这对隐 藏面消除是非常重要的
6
正交规范化
glOrtho(left,right,bottom,top,near,far) 规范化 求出把指定裁剪体转化为默认裁剪体的变换
7
正交规范化矩阵
两步 – 把中心移到原点,对应的变换为
T(-(left+right)/2, -(bottom+top)/2,(near+far)/2))