非线性补偿-过程控制(自动化)
过程控制系统课设

过程控制系统课程设计一、设计任务书1. 题目PH控制系统2. 设计要求①设计义某化工过程中废液中和的pH控制系统;②对控制系统稳定性进行分析;③对控制系统的参数进行整定;④控制系统Simulink仿真。
3 . 仪器设备A3000现场控制系统,pH控制系统。
二、基本原理pH控制系统子工业,尤其是化工等行业,应用非常广泛。
利用pH控制可以实现化工过程的正常生产过程、造纸厂等化工厂废液达标排放等。
1. pH的特点PH控制系统的主要方式有:有一种碱(或酸)滴定另一种物质使pH值保持在某一值上;对两种分别呈酸性和碱性物质的流量进行控制使pH值保持在某一值上;控制两种物质使混合溶液保持在一定的pH值上。
PH控制和其他控制参数的不同主要有以下两点:●PH滴定曲线的高度非线性;●滴定过程的测量纯滞后特性。
图01为典型的酸碱滴定特性曲线。
从图01知,溶液的pH值随中和流量非线性变化。
图01 典型的酸碱滴定特性曲线显然在控制系统中将pH值的变化转化为中和反应酸碱的控制流量变化,是根据滴定特性曲线进行的。
将滴定特性曲线转化为酸碱流量变化规律的方法主要有三种:●利用非线性阀补偿过程的非线性;●采用三段式滴定调节器,用三条相接的线性段代替非线性滴定曲线;●采用滴定曲线的非线性调节器精确描述滴定曲线。
随着技术的进步,利用非线性阀补偿滴定曲线非线性用的越来越少;而基于计算机功能元器件或计算机的第二种方法和第三种方法应用越来越多。
对滞后的补偿常采用以下三种方法:●微分Smith补偿方法,由于该方法本身适应能力较差,较少使用;●改进的Smith补偿方法;●自适应方法,应用较多的是增益自适应的Smith法。
为了提高控制系统的误差跟踪能力,pH控制系统经常采用的控制策略是PI或PID,不能采用P调节。
2. 三段式非线性调节器和采用滴定曲线的非线性调节器(1)三段式非线性调节器实际中,酸碱中和后通过pH计测得pH值的大小,控制系统当前pH值大小折算成溶液中酸碱量的多少,并调节系统酸碱流量的大小实现要求的pH值。
过程控制与自动化仪表
16、量程调整的目的是使变送器输出信号的上限值������������������������ 与测量范围的上限值������������������������ 相对应。 17、零点调整和零点迁移的目的都是使变送器输出信号的下限值 ������������������������ 与测量信号的下限值 ������������������������ 相对应。 18、物位是指设备和容器中液体或固体物料的表面位置。 19、电容式物位计适用各种导电、非导电液体的液位或粘性料位的远距离连续测量和指示,也 可用于导电和非导电液体之间及两种介电常数不同的非导电液体之间的界面测量。它不受真空、 压力及温度等环境的影响,安装方便,结构牢固,易维修,价格较低,但选型时应根据现场实际 情况,即被测介质的性质(导电性、粘性) 、容器类型(规则 /非规则、金属/非金属)选择合适 的电容式物位计。
6
第四章
1、过程参数检测与变送作为过程控制技术的一个重要组成部分,是实现过程控制的基础。 能感受规定的被测量,并按照一定规律将其转换为可用电量的器件或装置就是传感器。 2、敏感元件是直接感受被测物理量,并以确定关系输出另一物理量的元件。 3、传感元件的作用是将传感元件输出的非电量转换为电参量。 4、测量转换电路的作用是将传感元件输出的电参量转换为便于传输和处理的电量。 5、变送器是把传感器的输出信号转变为可被空啊在其识别的信号的一种转换器。 6、信号制是指在成套仪表系列中,各个仪表的输入/输出之间采用何种统一的标准信号进行联络 传输的问题。 7、过程控制仪表使用的联络信号一般可分为气压信号和电动信号。 8、电动模拟信号有直流电流、直流电压、交流电流和交流电压四种。 9、检测仪表的信号传输方式一般有两种:串联型和并联型。 10、变送器信号传送和供电的方式有三种。 11、绝对误差是指仪表的实测示值 X 与真值������������ 的差值。 12、相对误差是绝对误差△X 与真值������������ 的比值。 13、引用误差是绝对误差△X 与检测仪表量程������������ 之比的百分数。 14、准确度又称为精度,主要用于反映仪表的准确程度。 15、仪表的校表是指如何确定仪表的准确度等级,而仪表的选表是指如何选择仪表的准确度等 级。 根据仪表的校验数据来确定仪表的准确度等级, 仪表的允许误差应大于或等于仪表校验所得的最 大相对误差的百分数; 根据工艺要求选择仪表准确度等级时, 仪表的允许误差应小于或等于工艺 上所允许的最大相对误差的百分数。
自动化仪表与过程控制

参考书
3
自动检测技术与装置. 张宏建等. 化学工业出版社. 2004.7
4
自动化仪表与过程控制. 施仁等. 电子工业出版社. 2009.2
5
自动检测技术及仪表控制系统. 张毅等. 化学工业出版社. 2005.3
6
过程控制及仪表. 邵裕森. 上海交大出版社
7
参考书
点名作业20%
1
Hale Waihona Puke 试验成绩10%2期末考试70%
3
考核方式
过程控制的特点
第一章 过程控制与自动化仪表概述
系统由被控过程和检测控制仪表组成 过程控制采用各种检测仪表、控制仪表和计算机等自动化工具,对整个生产过程进行自动检测、自动监督和自动控制。检测仪表把工艺参数转换为电信号或气信号,反映生产过程状况;控制仪表接受检测信号对过程进行控制。 被控过程的多样性 生产规模不同、工艺要求各异、产品品种多样导致过程的结构性、动态特性多样。通常被控过程属于多变量、大惯性、大时延特征,还有非线性与时变特性。(锅炉、热交换器、精馏塔) 控制方案的多样性 被控对象复杂导致控制方案多样性。单/多变量控制系统、常规仪表控制/计算机集散控制系统、提高控制品质的和实现特定要求的控制系统。单回路、串级、前馈、比值、均匀、分程、选择性、大时延、多变量系统,还有先进过程控制系统(自适应、预测、补偿、智能、非线性控制等)。
02
过程控制
自动化仪表----- 用于生产过程自动化的仪器或设备,是实现工业企业自动化的必要手段和技术工具。
特点----- 兼容性、统一标准
自动化仪表
连续生产过程主要有以下几种形式:
.传热过程 通过冷热物流之间的热量传递,达到控制介质温度、改变介质相态或回收热量的目的。典型设备:换热器
9.分程控制-过程控制(自动化)解析

本讲主要内容
分程控制的特点与适用场合; 分程区间的确定方法; 阀位控制的概念与设计方法。
例1:间歇聚合反应器的控制问题
T
Y
冷水
“A”
蒸汽
“B”
控制要求:反应开始前,需要用蒸汽加热以达到反应所需 的温度;当反应开始后,因放出大量反应热,需要用冷水 进行冷却。要求全过程自动控制反应器的温度,怎么实现?
氮封的技术要求
实行氮封的技术要求是:要始终保持储罐内的 氮气压微量正压。储罐内储存物料量增减时, 将引起罐顶压力的升降,应及时进行控制,否 则将使储罐变形,更有甚者,会将储罐吸扁。 因此,当储罐内液面上升时,应停止继续补充 氮气,并将压缩的氮气适量排出。反之,当液 面下降时应停止放出氮气。只有这样才能达到 既隔绝空气,又保证容器不变形的目的。
多回路PID控制系统小结
用于改善控制系统性能的多回路PID系统 (1)串级控制系统; (2)前馈控制系统; (3)变增益/变比值控制系统。
用于满足工艺特定需要的多回路PID系统 (1)均匀控制系统; (2)比值控制系统; (3)分程控制系统; (4)阀位控制系统; (5)选择性控制系统。
练习
题1 下图为化学反应器的过程控制系统:1)说明图中的控制策略属于哪类控制系统?2) 最主要的被控变量是什么?最主要的操纵变量是什么?3)图中哪个控制器要整定的最慢, 哪个控制器要整定的最快?为什么?4)阀门V1是气开还是气关?为什么?V2是气开还是 气关?为什么?5)指出各图中控制器的正反作用,并给出选取的理由;6)给出图中控制 规律的选取。
0.10
调节阀气动信号(MPa)
避免两调节阀频繁开 闭的方法: (1)控制阀引入不 灵敏区。 (2)同时,控制器 引入调节死区(为什 么?)
自动控制原理第八章非线性控制系统
如果一个非线性系统在初始扰动下偏离平衡状态,但在时间推移过程中能够恢复到平衡状态,则称该系统是稳定 的。
线性系统稳定的必要条件
系统矩阵A的所有特征值均具有负实 部。
系统矩阵A的所有特征值均具有非正实 部,且至少有一个特征值为0。
劳斯-赫尔维茨稳定判据
劳斯判据
通过计算系统矩阵A的三次或更高次特征多项式的根的实部来判断系统的稳定性。如果所有根的实部 均为负,则系统稳定;否则,系统不稳定。
输出反馈方法
通过输出反馈来改善非线性系统的性能,实 现系统的稳定性和跟踪性能。
自适应控制方法
通过在线调整控制器参数来适应非线性的变 化,提高系统的跟踪性能和稳定性。
非线性系统的设计方法
根轨迹法
通过绘制根轨迹图来分析系统的稳定性,并 设计适当的控制器。
相平面法
通过绘制相平面图来分析非线性系统的动态 行为,进行系统的分析和设计。
感谢您的观看
THANKS
自动控制原理第八章非线性 控制系统
目录
• 非线性系统的基本概念 • 非线性系统的分析方法 • 非线性系统的稳定性分析 • 非线性系统的校正与设计 • 非线性系统的应用实例
01
非线性系统的基本概念
非线性系统的定义
非线性系统的定义
非线性系统是指系统的输出与输入之 间不满足线性关系的系统。在自动控 制原理中,非线性系统是指系统的动 态特性不能用线性微分方程来描述的 系统。
02
它通过将非线性系统表示为一 个黑箱模型,通过测量系统的 输入输出信号来研究其动态特 性。
03
输入输出法适用于分析具有复 杂结构的非线性系统,通过实 验测量和数据分析,可以了解 系统的动态响应和稳定性。
03
过程控制思考题(填空简答)
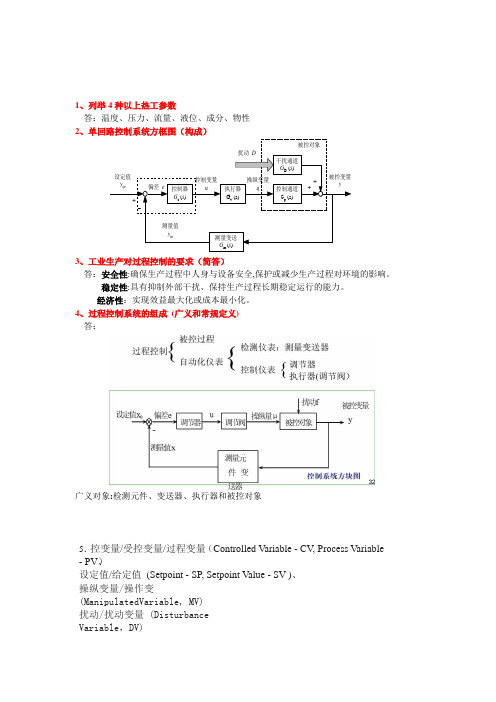
1、列举4种以上热工参数答:温度、压力、流量、液位、成分、物性2、单回路控制系统方框图(构成)3、工业生产对过程控制的要求(简答)答:安全性:确保生产过程中人身与设备安全,保护或减少生产过程对环境的影响。
稳定性:具有抑制外部干扰、保持生产过程长期稳定运行的能力。
经济性:实现效益最大化或成本最小化。
4、过程控制系统的组成 (广义和常规定义)答: 广义对象:检测元件、变送器、执行器和被控对象5.控变量/受控变量/过程变量(Controlled Variable - CV , Process Variable - PV )、设定值/给定值 (Setpoint - SP, Setpoint Value - SV )、操纵变量/操作变(ManipulatedVariable, MV)扰动/扰动变量 (DisturbanceVariable ,DV)控制器G c (s )执行器G v (s)控制通道G p (s)测量变送G m (s )设定值y sp 偏差 e +_控制变量u 操纵变量q 被控变量y 测量值y m 扰动 D 干扰通道G D (s )++被控对象测量/测量信号 (Measurement )控制/控制信号/控制变量(Control Variable )6、干扰和扰动的概念答:干扰(扰动):除操纵变量以外,作用于对象并能引起被控变量变化的因素,称为干扰或扰动。
7、过程控制系统按结构如何分类(画出结构图)答:反馈控制系统前馈控制系统前馈-反馈控制系统7、按设定值如何分类答:定值控制系统:设定值固定不变或在规定的小范围内变化随动控制系统:设定值随时间任意变化程序控制系统:设定值按预定的时间程序变化,也称为顺序控制系统8、过程控制单项性能指标有哪些?分别表征什么特性(会算)答:最大偏差和超调量(准确性指标)、衰减比(稳定性指标)、余差(准确性指标)、过渡时间(快速性指标)、振荡周期或频率(快速性指标)9、数学模型要素答:输出量和输入量10、有自衡过程和无自衡过程(含传递函数)答:当原来处于平衡状态的过程出现干扰时,其输出量在无人或无控制装置的干预下,能够自动恢复到原来或新的平衡状态,则称该过程具有自衡特性,否则,该过程则被认为无自衡特性。
关于化工行业智能化应用的展望

关于化工行业智能化应用的展望摘要:现代化工业水平持续上升,对过程控制提出严格要求。
工业领域应用过程控制方式,已经成为自动化重要分支。
热工、化工工艺设备持续革新,为了全面发挥出工艺效能,增加经济效益,需要配置自动化装置。
文章在对化工智能化仪表特点与功能分析基础上,介绍了化工智能仪表应用的优势,重点对智能化仪表在化工过程控制中的应用进行分析。
关键词:智能化仪表;化工过程控制;应用要点引言在化工生产中,智能化仪表具备重要作用,能够全面促进现代化建设发展。
现代工业发展速度加快,自动化控制提出较多严格要求,对仪表智能化提出重要指示。
现阶段,化工企业生产规模持续扩大,且生产技术、工艺内容日益复杂,合理应用智能化仪表,全面促进化工发展。
1.智能化仪表特点与功能1.1 数据存储功能在智能化仪表中配置微处理器,只需针对仪表实施通电操作,就可以恢复到断电数据状态。
对于传统仪表来说,通过组合逻辑电路、时序电路方式,可以高效采集数据。
然而仪表断电之后,需要从初始状态计算应用仪表,人力与物力消耗大。
智能化仪表具备记忆功能,能够存储多个数据参数。
1.2 计算功能在传统仪器使用中,操作人员可以获取基础参数,之后通过模拟算法电路实行运算。
通过此种方式,只能对简单数据进行分析。
如果需要处理海量、复杂数据,则操作消耗时间比较多,相应降低计算精度。
应用智能化仪表,需要采用数字电路控制法,能够实现准确数学运算。
1.3 可编程特性利用编辑方式,可以实现程序功能,植入系统能够代替硬件结构,全面实现仪器仪表功能。
按照逻辑电路可知,计算机软件程序替代后,属于硬件软件化处理。
尤其是接口芯片复杂控制。
当选用程序编写时,则操作较为简单[3]。
如果应用硬件编写,需要依赖定时电路和控制电路,相应增加系统复杂度。
1.4 误差修正功能微处理器应用软件,可以实现自主计算与分析,处理检测过程的抗干扰问题、线性化问题,有效缓解硬件负担。
计算机系统存储容量大,所以采用远程控制方式,合理引入计算机系统,能够获取仪表检测结果,同时做出相关处理反应。
过程控制工程_8-13非线性控制系统
8.3.1 位式控制的改进及其发展
(1)一般的改善方法 合理选择中间区,或采用多位式控制,以减小振荡的 幅值。
8.3.1 位式控制的改进及其发展
(2)控制作用的改进
脉冲宽度调制,输出变成一系列的方波,方波宽度
受输入偏差的调制,提高方波变化的频率,接近连续 控制,可消除振荡。
8.1.1 液位的非线性控制 (2)非线性控制器类型
① PI、PID型,不灵敏区内只是增益K发生变化——A型
② PI型,K和Ti同时起作用——B型
③ 不灵敏区内以PV代替SP,因此,不灵敏区成为“死 区”,不灵敏区外,和B型一样
8.1.1 液位的非线性控制
参数整定要注意的问题:
①作为液位均匀控制器,其不灵敏区以外的控制作用要 大些,迅速拉回到不灵敏区内;
Gc1(s) P1(s) G11(s)
Y1(s)
G12(s) G21(s)
R2
Gc2(s) P2(s)
Y2(s)
G22(s)
Y (s) G(Байду номын сангаас)P(s) Y1(s)
Y2 (s)
G11(s) G21(s)
G12 (s)P1(s) G22 (s)P2 (s)
解耦控制—设计控制系统,消除系统之间耦合
Fo
8.1.1 液位的非线性控制
液位的非线性控制还可采用变增益 的非线性控制器。 是:控 制器的增益或积分时间与输入偏差以一定关系连续地变化,例如 控制器的增益KC及积分时间Ti与液位偏差以一个指数关系连续地 变化,同时增益和积分时间之间为使系统ζ值恒定,保证Ti 、KC 恒定。偏差与KC、Ti间的关系可用下式表示:
G12(s) G21(s)
5.前馈控制系统-过程控制(自动化)
蒸汽 HV, RV 工艺介 质
稳态工作点:T1=20℃, RF=10 T/hr,RV=2T/hr, Kv=800,T2=180℃。 假设:T2温度测量变送的量 程为100-300℃,RV和RF的 量程分别为0 ~ 5 T/hr和0 ~ 25 T/hr。
cp, RF , T1 冷凝液
T2
换热器的线性前馈控制
结论
引入前馈控制的可能应用场合:
常规反馈控制系统难以满足要求; 干扰可测。 主要被控量不可测
应用前馈控制的前提条件:
主要干扰可测; 调节阀与被测干扰之间没有因果关系; 干扰通道的响应速度比控制通道慢,至少应接近; 干扰通道与控制通道的动态特性变化不大。
副变量需要满足:
快速反应主要干扰的影响 干扰对副、主变量的影响具有因果关系 调节阀对副、主变量的影响具有因果关系
NO!
无法采用串级控制!
换热器的前馈控制方案
蒸汽 FF
HV, RV
工艺 介质
RF
cp, RF , T1
凝液
T2
前馈控制的思想
D1 前馈 控制器 对象 y Dn
u
D1,……,Dn为 可测扰动;u,y 分别为被控对象 的操作变量与受 控变量。
换热器反馈控制系统举例
(参见模型…/FFControl/ExHeaterPID.mdl)
换热器前馈反馈控制系统 1
(参见模型…/FFControl/ExHeaterFFC_PID1.mdl)
换热器前馈反馈控制系统 2
(参见模型…/FFControl/ExHeaterFFC_PID2.mdl)
前馈+反馈控制的仿真
6.3s 1 % GFF ( s) 0.975 exp 0.3s 3s 1 %
过程控制课件--第六章利用补偿原理提高系统

01
利用补偿原理提高系统可靠性和安 全性
提高系统可靠性和安全性的重要性
提高系统可靠性:减少故障发生率,提高系统稳定性 提高系统安全性:防止数据泄露、病毒攻击等安全威胁 提高系统可用性:确保系统在关键时刻能够正常运行 提高系统可维护性:降低维护成本,提高系统维护效率
利用补偿原理增强系统可靠性和安全性的方法
01
利用补偿原理提高系统性能指标
提高系统性能指标的方法
补偿原理:通过引入补偿器,提高系统的稳定性和准确性 反馈控制:通过反馈信号,调整系统的输出,提高系统的性能 前馈控制:通过预测未来的输入,提前调整系统的输出,提高系统的性能 自适应控制:根据系统的状态和输入,自动调整系统的输出,提高系统的性能
01
利用补偿原理实现系统智能化控制
智能化控制技术的发展现状
智能化控制技 术在工业生产 中的应用越来
越广泛
智能化控制技 术在智能家居、 智能交通等领 域的应用逐渐
普及
智能化控制技 术的发展推动 了人工智能、 大数据等技术
的发展
智能化控制技 术的发展面临 着技术瓶颈和
伦理问题
利用补偿原理实现智能化控制的方法
提高系统的稳定性:通过补偿,可以减少系统的不稳定因素,提高系统的稳定性。 提高系统的准确性:通过补偿,可以减少系统的误差,提高系统的准确性。 提高系统的响应速度:通过补偿,可以加快系统的响应速度,提高系统的效率。 提高系统的抗干扰能力:通过补偿,可以减少系统的干扰,提高系统的抗干扰能力。
补偿原理的实现方式
反馈控制:通过反馈信号来调整系统的输出,以实现对输入信号的补偿 前馈控制:通过预测输入信号的变化,提前调整系统的输出,以实现对输入信号的补偿 自适应控制:通过不断学习和调整系统的参数,以实现对输入信号的补偿 模糊控制:通过模糊逻辑来调整系统的输出,以实现对输入信号的补偿
集散控制系统复习题

集散控制系统复习题一、填空题1.集散控制系统是以微处理器为基础的集中分散型控制系统。
集散控制系统的主要特点是集中管理和分散控制。
2.TPS和PKS是Honeywell公司的集散控制系统产品,Delta V是Emerson公司的集散控制系统产品,I/A S是Invensys公司的集散控制系统产品。
国产集散控制系统的产品有浙大中控的SUPCON、新华公司的XDPF、国电智深的EDPF等。
3.集散控制系统基本构成由分散过程控制装置、操作管理装置、通信系统组成。
4.分级递接控制系统结构分为多层结构、多级结构、多重结构。
P165.开放系统的标志是可移植性、可操作性、可适宜性和可用性。
6.集散控制系统的分散控制结构表现为组织人事的分散、地域的分散、功能的分散和负荷的分散。
P187.常用的冗余方式有同步运转方式、待机运转方式、后退运转方式和多级操作方式。
8.现场总线是在过程自动化和制造自动化中,实现智能化现场设备与高层设备之间互联的、全数字、串行、双向传输的、多分枝结构的通信系统。
9.现场总线可分为执行器传感器现场总线、设备现场总线和全服务现场总线三类。
10.现总线的特点是开放性、智能化、互操作性、环境适应性和分散控制等。
11.采用现场总线控制系统的主要因素是节省硬件数量和投资、节省安装费用与维护费用、多变量检测和运输、缩短安装时间和投运时间、等。
P2112.现场总线控制系统与传统集散控制系统的相同点包括分散控制集中管理和综合自动化组成部分等;主要差别包括通信和传输的差别和数字传输技术等。
13.影响现场总线实时性的主要因素有现场总线数据传输速率和主战应用程序的大小与复杂程度;主要解决措施包括减少网络通信的吞吐量,保证一旦有通信要求就能够立即实现通信、提高有效通信量、减少通信冲突的发生,保证通信的实时性、采用全双工通信模式和交换式以太网、采用塌缩的通信模型和通信协议、选用合适的现场总线仪表,减少通信量、采用发布方/预约接收方的通信结构、设置优先级、采用虚拟局域网和引入质量服务等。
死区非线性系统特性分析及补偿控制
《自动化技术与应用》2006年第25卷第4期工业控制与应用Industry Control and Applications死区非线性系统特性分析及补偿控制王印松,田瑞丽(华北电力大学自动化系,河北 保定 071003)摘要:针对含有非线性“死区”环节的热工控制对象,用线性系统理论和描述函数方法分析了系统的动态特性,给出了可选择的控制器的类型和参数的极限值;为了克服“死区”对闭环系统性能的影响,建立了偏差信息与死区参数之间的关系,构造了一个动态“死区逆模型”来修正控制器的输出,试验结果表明,所设计的动态逆模型可以完全补偿死区特性的影响,这种方法简单、可行。
关键词:死区;极限环;补偿控制中图分类号:TP273 文献标识码:B 文章编号:100327241(2006)0420064204Analysis a n d Co mp e ns atio n f or N o nline arS ys te m s wit h De a d -zo neWANG Yin -song ,TIAN Rui -li(Automation Department of N orth China E lectric P ower University ,Baoding 071003,China )Abstract :The dynamic performance of a thermal plant with dead-zone is analyzedbased on the describing function method.T o eliminate the dead-zone effect a Dead-zone inverse m odel is established.The result of simulation shows that this compensation method is feasible and effective.K ey w ords :Dead-zone ;Limit-cycle ;C ompensation control1 引言由于机械设计和制造方面的原因,在许多典型的工业控制系统的执行机构中通常包含“死区”环节,这些环节的存在会恶化系统的调节品质,影响系统的输出精度;如果调节器参数选择不当,甚至可能会使系统出现自激振荡,无法正常工作。
《自动化仪表与过程控制》习题及思考题

《自动化仪表与过程控制》习题及思考题习题一1、设有一温度测量仪表,量程为0%~1100。
g精度为0.5级,试求该仪表允许的最大绝对误差、分格值的下限值和灵敏限的上限值?2、为什么热电偶测温时要进行冷端温度补偿?如何进行补偿?3、用热电偶测温时,为什么要用补偿导线?补偿导线能起冷端温度补偿的作用吗?4、用镖铭-镖硅(分度号:K)热电偶工作时,冷端温度TO=30 %,测得热电偶的电势:E (T, T0) =39.29mv,求被测介质的实际温度?5、热电偶冷端温度补偿桥路如下图所示。
已知∕∣=∕2=0∙5"Z A,热电偶为镖铭-铜银热电偶。
试求补偿电阻扁,在基准温度"=20%时的阻值。
习题二1、已知粕错-伯、铜-康铜热电偶具有下图所示温度特性,其中& < & < ( <储,试设计一个非线性反馈电路,并简述其工作原理。
2、DDZ-IIl型热电阻温度变送器的线性化器原理图及热电阻非线性特性如下两图所示。
求,,与用的关系表达式,并简述其线性化原理.RN3、有两只DDZ-Ill型温度变送器,一只变送范围为IoOo°c,另一只变送范围为1500°c,这两只表的精度等级均为0.5级,若用这两只表去测量500°C ~15OO o c 的温度,试问用哪只表测量时误差小些?(配合热电偶使用)习题三1、什么是绝对压力、表压力和真空度?其关系如何?2、为什么一般工业上的压力计都做成测表压或真空度,而不做成测绝对压力的形式?3、某压力表的测量范围为O-IPa,精度等级为1级,试问此压力表允许的最大绝对误差是多少?若采用标准压力计来校验该压力表,在校验点为0∙5Pa时, 标准压力计的读数为0,508Pa,试问被校压力表在这一点是否符合1级精度?为什么?4、若测量某容器压力,工艺要求压力为:L5±0∙05VPα,现可供选择的弹簧管压力表的精度有:LO、1.5、2.5X及4.0,可供选择的量程有:0~1.6, 0-2.5, 及0~4.0 (MPa),试选择弹簧管压力表的量程及精度等级?5、现有一只测量范围在0~L6MPa,精度为1.5级的普通弹簧压力表,校验后, 其结果如下:标准表MPa00.3850.79 1.21 1.595上行程MPa00.40.8 1.2 1.6下行程MPa00.380.78 1.195 1.59试问这只表是否合格?6、液位检测系统如图所示。
基于阀门非线性补偿的亚临界机组主蒸汽温度控制
DOI:10.15913/ki.kjycx.2024.07.022基于阀门非线性补偿的亚临界机组主蒸汽温度控制王航(国家能源投资集团有限责任公司,北京100011)摘要:为保证火电机组的安全稳定运行,需维持主蒸汽温度处在正常范围内。
利用减温水调节主蒸汽温度,若在设计控制方案时不考虑减温水调节阀的流量特性,会出现由于减温水调节阀的非线性特性导致控制品质下降。
通过搭建某亚临界机组的主蒸汽温度超前区、惰性区和阀门对象仿真模型,研究了带有阀门非线性补偿的主蒸汽温度控制。
通过采集阀门输入输出数据,拟合阀门流量特性曲线,设计了基于多项式拟合方法的阀门开度补偿器。
仿真结果表明,此方法可在一定程度上克服阀门流量特性引起的非线性,使整个系统的控制效果更加快速和平稳,提升主蒸汽温度控制的品质。
关键词:火电厂亚临界机组;主蒸汽温度;阀门流量特性;非线性补偿中图分类号:TP273;TM621 文献标志码:A 文章编号:2095-6835(2024)07-0085-04根据中国当前电力能源结构的构成,火电机组在国内总装机容量中仍占50%以上[1]。
主蒸汽温度控制对于火电机组的安全、稳定和高效运行起着非常关键的作用,而主蒸汽温度对象是一个非线性、大惯性、大迟延对象,其参数会随着工况的变化而变化,要建立其精确的数学模型相对困难[2-3],从而导致主蒸汽温度的有效控制成为火电机组运行中的一个难题。
目前火电机组主要通过调节减温水调节阀来进行主蒸汽温度控制。
阀门是工业生产中广泛使用的流量控制设备。
阀门具有非线性特性,在控制系统分析设计过程中,如果不将其非线性加以考虑,会导致控制品质下降,甚至对工艺回路系统造成冲击,导致控制系统的预期控制效果与实际控制效果出现较大差异[4]。
常见的阀门非线性因素包括限位、死区、间隙、行程时间、开关特性、黏滞特性和流量特性[5]。
针对阀门死区的非线性特性,文献[6]通过对阀门模型的非线性特性进行辨识,确定了模型的相关参数,通过克服死区非线性特性对系统的影响,提高了系统的动态性能;文献[7]对阀门的非线性特性进行建模,以模拟阀门的限位、死区、黏滞和开关特性等非线性特性,从而更深入地分析调节阀的非线性动态模型。
(工业过程控制)13.非线性补偿

非线性补偿的基本原理
逆特性补偿法
通过在系统中引入具有相反非线性特 性的元件或环节,来抵消原始非线性 特性的影响。
预失真补偿法
在输入信号进入系统之前,先对其进 行适当的非线性变换,以补偿系统中 的非线性失真。
迭代学习控制法
通过不断迭代和学习,逐渐减小或消 除非线性对系统性能的影响。
03
非线性补偿的应用
在化工过程控制中的应用
总结词
提高产品质量和产量
详细描述
非线性补偿技术可以改善化工过程的控制效果,提高产品质量和产量。通过补偿非线性 效应,能够减小产品的不合格率,并增加产量。
在电力系统的应用
总结词
提高电力系统的稳定性和效率
VS
详细描述
在电力系统中,非线性负载会导致谐波和 无功功率等问题,影响系统的稳定性和效 率。非线性补偿技术可以用于抑制谐波、 补偿无功功率,从而提高电力系统的稳定 性和效率。
常见非线性特性
饱和非线性、死区非线性、间隙非线性、继电器非线 性等。
非线性补偿的重要性
01
02
03
提高系统性能
通过补偿非线性,可以减 小或消除非线性对系统性 能的影响,提高系统的线 性度和精度。
扩展系统动态范围
非线性补偿能够扩展系统 的动态范围,使得系统在 更大的输入范围内保持良 好的性能。
提高系统稳定性
神经网络补偿法
利用神经网络的自适应性和学习能力, 对系统中的非线性进行补偿和校正。
02
非线性补偿的方法
逆系统方法
总结词
逆系统方法通过构建逆模型来补偿非 线性特性,使整个系统线性化。
详细描述
第8、9、10章非线性、纯滞后、解耦控制系统
GA
u 输出
教学进程
8.2 非线性过程的非线性控制
有些非线性特性严重的过程,必须采用非线性控制
8.2.1 pH控制的非线性控制
典型的非线性过程 P195 图8-9 在PH值为7附近非线性畸 变严重,斜率非常大,普通PID控制器难于控制
pH控制在工业应用很多,如污水处理过程
11 10 9 8
pH 7
u c
图8-19 使用模型的开关控制
教学进程
8.3.2 Bang-Bang 控制 属于一种最优控制,时间最优控制,可以通过最优控制理 论进行推导 关键:开关时间的计算 (1)手动Bang-Bang控制 操作人员根据开关时间计算公式求出切换时间,手动 控制阀门
教学进程
8.3.2 Bang-Bang 控制
缺点:产生不衰减的振荡环
8.3.1 位式控制的改进及其发展 (1)一般的改善方法 合理选择中间区,或采用多位式控制,以减小振荡的 幅值。
教学进程
8.3.1 位式控制的改进及其发展
(2)控制作用的改进
脉冲宽度调制(PWM),输出变成一系列的方波,方波 宽度受输入偏差的调制,提高方波变化的频率,接近连续 控制,可消除振荡。
运算单元 执行装置
过程
逻辑单元
教学进程
8.1.2 线性过程的其它非线性控制
VSS采用计算机实现容易,简单的可以采用仪表的一 些计算单元完成
P193 图8-5 一个简单的变结构控制器
对于高阶系统的控制效果好于一般PID控制器
K1
(•)2
√(•)
输入偏差
ė
S
K2
(•)2
eP
TP
+1 -1
Ti /s
×
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
pH值与x是非线性关系,即中和过程具有严重的非线性特性
中和过程的动态模型
参见 p. 239 图14.3-3
pH中和过程的单回路控制
中 和 液 被调液体
SP AC
生成液
仿真实验过程: (1) t = 60 min,pH设定值从6.5提高至7.0; (2) t = 110 min,被调酸性液体的流量F1从30 L/min下降至15 L/min; (3) t = 160 min,被调液体pH值从5下降至4.5; (4) t = 210 min,中和液pH值从11下降至10.5.
和 液
生成液
V
中和反应:
HO H H 2O
中和反应平衡式:
HOHKw
1014(mo/lL)2
pH的定义式:
pH lgH, H 1 0pH ,O H1 0 1 4pH
pH中和过程的稳态模型
被调液体
F1,C1, pH1
中 和
F2,C2, pH2
液
生成液
V
x
Kw [H]
[H]
假设先混合后反应, 混合后 的酸与碱浓度x1、 x2分别为
G2 即控制阀开度
热平衡方程:
C 1G 1(TT 1)G 2
控制通道静态增益:
Kp
T 1
G2 C1பைடு நூலகம்1 G1
Kv 选快开阀
结论
在进行调节阀流量特性选择时还需注意几个问题:
1、对过程的非线性补偿,可以只考虑静态补偿,但有时也需 从动态上加以考虑,这要看具体过程的情况而定。
2、在多种扰动因素下,过程特性可能有不同规律的变化。此时, 选用调节阀应考虑在主要扰动因素下,对过程特性进行补偿。
统的回路增益为线性; 自适应控制器:根据控制系统的性能自动调整控制
器的增益,以使系统的回路增益为近似线性。
非线性增益补偿方法1 --调节阀特性补偿
y f (d ) um
f ×100
100
80
3
1
60
4
40
2
20
3.3
0
20
40
60
80
100
l ×100
非线性增益补偿方法1 --调节阀特性补偿(续)
在系统设计时,只要把被控过程中随负荷变化的那一 部分特性包括到副回路中去,就可起到对非线性的校 正作用。
非线性增益补偿方法3 --比值器实现非线性补偿
u(t)
×
RVsp
RV
FC
T2sp
TC
蒸汽
补偿方法:通过引入中间变 量u,实现主对象增益的近 似线性。
RF
T2
凝液
工艺 介质
C 1RF(T2T 1)R V
RV u
RF
T2 1 RV RF
T2 u
RF
1 RF
结论
U是中间变量 ,是蒸汽流量RV与工艺物料量RF之比,被控变 量T2为工艺介质的出口温度。 由公式可知,u与T2间的静态 增益与负荷无关,即主对象增益为线性。
图中的控制系统结构:变比值控制系统。
被调液体
F1, pH1
pH中和过程
中 F2, pH2
x1F1F 1F2c1,x2F1F 2F2c2
中和反应的结果使混合液 中的剩余酸浓度为
x x 2 x 1 [O ]H [H ]
[H]
x2 4
Kw
x 2
pH中和过程的非线性
p H lg H ] [ l gx 4 2 K w 2 x ,
xF 2 c 2 F 1 c 1 F 1 F 2
G1, T1 进料
蒸汽
Tsp
u(t)
G2
TC
Tm
T 凝液
假设主要干扰为进 料流量。可写出热 平衡方程:
C 1G 1(TT 1)G 2
控制通道静态增益:
T 1
Kp
G2 C1G1 G1
补偿方法:通过合理选择调节阀的流量特性,实现广义对象增益 的近似线性。
非线性增益补偿方法1 --调节阀特性补偿(续)
单回路控制中,非线性因素主要存在于两个部分:一是用于实 际控制的测量仪表或执行机构中所包含的非线性,如控制器中 的限幅特性,阀门的等百分比、抛物线和快开等特性都属于非 线性特性。
二是对象本身存在非线性(如对象的增益不是常数而是负荷等 因素的非线性函数-----变增益的对象,有些对象动态特性的 描述用非线性方程来表示。)。
pH中和过程的 非线性变比值串级控制方案
F 被调液体
前馈控制
中
和 液
FC Rsp ×
生成液
u
干扰:被调液体的流量
pHC ysp
中和过程的变比值串级PID控制
F1
被调液体
中 和
F2
液
FC ×
生成液
u2
AC
pHm
pHsp
仿真实验过程: (1) t = 60 min,pH设定值从6.5提高至7.0; (2) t = 110 min,被调酸性液体的流量F1从30 L/min下降至15 L/min; (3) t = 160 min,被调液体pH值从5下降至4.5; (4) t = 210 min,中和液pH值从11下降至10.5.
单回路控制方案:由于中和曲线通常在pH=7附近具 有最大的灵敏度,即中和剂对pH值的通道增益最大, 因而控制系统极易在pH=7附近产生等幅振荡。为避 免出现等幅振荡,可引入调节死区,即在pH=7附近 不改变中和剂的流量。但带来的问题是控制系统的 控制精度下降,中和剂消耗增大。
在单回路控制系统中,当中和液控制阀前压力变化 较大时,解决办法-------设置中和液流量的副回路控 制以提高控制性能。
3、调节阀的流量特性,在实际管路中可能由于阀两端差压的变 化而发生畸变。因此,最后确定的流量特性,应考虑对管路特性 所造成畸变的修正。
4、装有阀门定位器的调节阀,可以采用改变定位器反馈凸轮的 特性来获得所需的流量特性。
非线性增益补偿方法2 --串级控制的内回路补偿
TC
Fm
Fsp
FC
进料
v(t)
P1
P2 燃料油
补偿方法:通过引入串 级控制方式,克服副回 路中的非线性。
出料 对于内环等效对象的稳态增益:
Kp' 2
Kc2KvKp2 1Kc2KvKp2Km2
Kc2KvKp2Km2 1
Kp' 2
1 Km2
结论
随负荷变化的Kp2对Kp2′影响很小,等效副对象的放大 系数主要由反馈回路的Km2来决定。
G1, T1 进料
蒸汽
Tsp
u(t)
G2
TC
Tm
T
Kp
T 1
G2 C1G1 G1
凝液
从静态增益补偿的角度考虑:
Kp
Kv
G1
G2 即控制阀开度
选等百分比阀
非线性增益补偿方法1 --调节阀特性补偿(续)
G1, T1 进料
蒸汽
Tsp
u(t)
G2
TC
Tm
T
凝液
从动态特性变化的角度考虑:
Tp
稳定性变差
G1
主要针对变增益对象特性,探讨常用的非线性补偿方法。
非线性增益补偿控制
对象增益非线性补偿方法
调节阀特性补偿,使广义对象增益为近似线性; 串级控制方式,以系统的鲁棒性来克服副回路中对
象的非线性; 引入比值等中间参数,使主回路广义对象的增益为
近似线性; 变增益控制器:通过引入对象增益的反函数以使系