农用机器人末端执行器设计方法探讨
【精品论文】码垛机器人多功能末端执行器的设计
【精品论文】码垛机器人多功能末端执行器的设计摘要:码垛机器人是一种用于物料的自动堆叠或拆卸的机器人。
末端执行器是码垛机器人中起到抓取和堆叠物料的重要组成部分。
本论文在对码垛机器人末端执行器的功能需求进行分析的基础上,设计了一种多功能末端执行器。
该末端执行器具有抓取、旋转、推动、举升等功能,并能够根据不同的物料进行灵活的调整。
通过对末端执行器的力学和电气设计的详细分析,验证了其设计的可行性。
实验结果表明,该多功能末端执行器能够满足各种物料的堆叠需求,并具有较好的抓取稳定性和操作精度。
关键词:码垛机器人;末端执行器;多功能;抓取稳定性;操作精度1. 引言码垛机器人作为现代物流领域中的重要装备,能够提高物料的堆垛效率和减少人工劳动,广泛应用于仓库、物流中心等场所。
末端执行器作为码垛机器人中与物料直接接触的部分,其功能的设计和性能的优化对整个系统的效率和稳定性有着重要影响。
2. 码垛机器人末端执行器的功能需求分析针对码垛机器人的末端执行器,其主要功能需求包括抓取、旋转、推动、举升等。
首先,末端执行器需要具有足够的抓取力和抓取稳定性,以确保能够稳定地抓取不同形状和材料的物料。
其次,末端执行器还需要能够对物料进行旋转调整位置,以适应不同堆叠方式的需求。
此外,末端执行器还需要能够推动物料,以便将其准确地堆叠到目标位置。
最后,末端执行器还需要能够对物料进行举升,以便于在堆叠过程中调整高度。
3. 多功能末端执行器的设计在对末端执行器的功能需求进行分析的基础上,设计了一种多功能末端执行器。
该末端执行器由机械臂、抓取器、旋转装置、推动装置和举升装置组成。
机械臂负责控制末端执行器的运动轨迹,抓取器负责抓取物料,旋转装置通过驱动装置实现物料的旋转,推动装置通过轮胎或滚轮实现物料的推动,举升装置通过液压或电动机实现物料的举升。
各个部件之间通过传感器和执行器进行信息传递和控制。
4. 多功能末端执行器的力学设计针对多功能末端执行器的力学设计,进行了详细的分析和计算。
基于TRIZ理论的苹果采摘机器人末端执行器的设计
(1) 结构合理紧凑并且可靠性高就会给批量生产带来难
度,即可制造性(32);
(2)执行器要尽可能做到适应复杂环境的采摘作业,可能
增加执行器机构的复杂程度,即装置的复杂性(36)。
以 上 两 类 条 件 通 用 工 程 参 数 为 27 、32 、35 、36 、39 , 分 别 将
以上参数作为行、列建立矛盾矩阵列表[4],如表2所示。
表2 执行器冲突矩阵
27
32
35
36
39
27
13、35、8、24 13、35、1 1、35、29、38
32
2、13、15
27、26、1 35、1、10、8
35 35、13、8、24 1、13、31
15、29、37、28 35、28、6、37
36 13、5、1 27、26、1、13 19、15、28、37
灵活程度高,结构设置合理紧凑,即结构的稳定性(39);
(2)采摘作业往往时间长、任务紧,所以末端执行器必须
可靠性高,即可靠性(27);
(3)为了节省资源,末端执行器的适用范围应该广泛,即
适应性及多用性(35)。
设计制作时在保证以上条件的过程中很有可能导致其他
性能有所下降,现将可能下降的性能总结如下:
Sheji yu Fenxi◆设计与分析
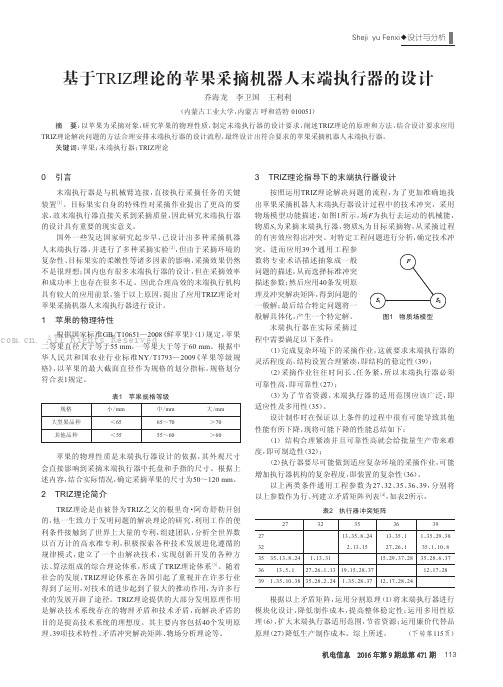
基于TRIZ理论的苹果采摘机器人末端执行器的设计
乔海龙 李卫国 王利利 (内蒙古工业大学,内蒙古 呼和浩特 010051)
摘 要:以苹果为采摘对象,研究苹果的物理性质,制定末端执行器的设计要求,阐述TRIZ理论的原理和方法,结合设计要求应用 TRIZ理论解决问题的方法合理安排末端执行器的设计流程,最终设计出符合要求的苹果采摘机器人末端执行器。
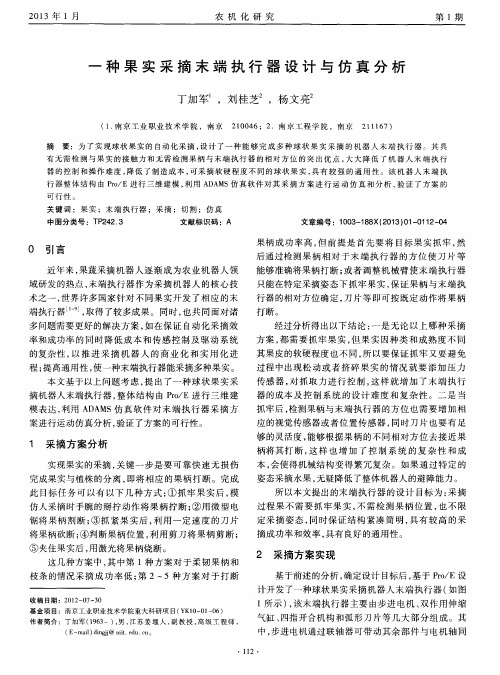
一种果实采摘末端执行器设计与仿真分析
1 所示) , 该末端执行器主要 由步进 电机 、 双作 用伸缩
摘
要 :为 了实 现 球状 果 实 的 自动 化 采摘 , 设 计 了一 种 能 够 完 成 多 种 球状 果 实采 摘 的 机 器 人 末 端 执 行 器 。其 具
有 无需 检 测 与 果实 的 接触 力 和无 需 检 测果 柄 与 末端 执 行 器 的相 对 方位 的 突 出优 点 , 大 大 降 低 了机 器 人末 端执 行
2 0 1 3年 1月
农 机 化 研 究
第 1期
一
种 果 实 采 摘 末 端 执 行 器 设 计 与 仿 真 分 析
丁加 军 ,刘 桂 芝 ,杨 文亮
( 1 . 南 京 工业 职 业 技术 学 院 ,南 京 2 1 0 0 4 6;2 .南 京 工 程学 院 ,南 京 2 1 l 1 6 7)
过程 中出现 松 动 或 者 挤 碎 果 实 的情 况 就 要 添 加 压 力 传感 器 , 对 抓取力进行控制 , 这 样 就 增 加 了末 端 执 行 器 的成 本 及 控 制 系 统 的 设 计 难 度 与 末 端执 行 器 的方 位 也需 要 增 加 相
此 目标任务 可以有 以下几种方式 : ①抓牢果 实后 , 模 仿人采摘时手腕的掰拧动作将果柄拧断 ; ②用微型 电
锯将果柄割 断; ③ 抓 紧果 实 后 , 利 用 一定 速 度 的刀 片
定采摘姿态 , 同 时保 证 结 构 紧 凑 简 明 , 具 有 较 高 的采
将 果 柄砍 断 ; ④ 判断 果 柄 位 置 , 利用剪刀将果柄剪断 ; ⑤ 夹 住果 实 后 , 用激 光将 果柄 烧 断 。 这 几 种方 案 中 , 其 中第 1种 方 案 对 于柔 韧 果 柄 和 枝条 的情 况 采 摘 成 功 率 低 ; 第 2—5种 方 案 对 于 打 断
柑橘收获机器人末端执行器的设计和优化

柑橘收获机器人末端执行器的设计和优化摘要:本课题主要通过对以前的研究论文的学习及本地水果采摘环境的考察,找到适合本地柑橘,胡柚等水果进行机械收获的机器人末端执行器的本体设计,包括对采摘对象的生长环境的调查取样,末端执行器的三维建模和整体机械人的建模。
关键词:柑橘收获末端执行器结构优化1 水果收获机器人的概念和研究意义水果收获机器人主要分为两部分:机器人的本体结构部分和控制部分。
其中,本体结构部分又可分为:机械手,末端执行器,底部平台,有的还有视觉系统。
在中国,随着农村经济的快速发展和不断调整种植结构,水果栽培面积,例如苹果、柑橘和葡萄,达到自1993年以来的900万公顷,占世界上水果种植面积总数的四分之一。
然而,水果收割任务中50%到70%的劳动力还是靠体力劳动。
因为农业人口正在减少,收获自动化亟待普及。
此外,由于果树是高个子,收割工作需要使用梯子,使手工收获危险高和效率低下[1]。
所以,农业收获机械化亟待普及。
因为水果本身易损伤和生长环境的复杂等因素的制约,现阶段的各种水果收获机器人都有各种不足。
本文就近几年来的有关论文进行研究学习及对本地柑橘的生长环境的调研,拟设计了一种适合本地柑橘机械采摘的简易机械臂及末端执行器。
2 本地柑橘的自然采摘环境浙江大部分都是山地地貌,并且大都种植了柑橘、芦柑、胡柚等柑橘属的植物。
虽然浙江的气候、土壤等都适宜于柑橘的生长,但是浙江的山地地貌也给采摘和运输带来了一定的难度。
每年的采摘季节,需要大批的劳动力,而于此相反的是,本地的劳动力日渐下降,全都去城镇务工了。
因此,针对柑橘的采摘机器人呼之欲出。
柑橘果实外有一层较厚的果皮,它能很好的减轻柑橘间的碰撞冲击力。
3 本设计的末端执行器及机械臂的结构3.1 采摘机械手的设计与工业机器人机械手不同,果蔬果实收获机器人的机械手,所处的外部环境是复杂的、多变的、非结构的,并且与果实的栽培方式有很大关系。
因此,设计机械手应在考虑栽培方式的基础上,使果实处于其作业空间内,并且能够避免障碍物(叶子、茎秆等),准确地抓取到果实。
末端执行器的设计

末端执行器的设计末端执行器(End effector)是机器人系统中的最后一部分,它连接到机器人臂的末端,负责与环境进行交互和完成特定任务。
末端执行器的设计对于机器人的性能和功能起着至关重要的作用。
本文将探讨末端执行器的设计原则、常见类型以及相关应用。
1.末端执行器的设计原则:a.功能性:末端执行器应能够实现所需的任务。
不同的任务可能需要不同的末端执行器设计,如抓取器、钻头、喷涂器等。
b.灵活性:末端执行器应具备适应性和灵活性,可以适应不同的工件形状和尺寸,并能完成不同的操作。
c.高精度:末端执行器应具备高精度和稳定性,以确保任务能够以准确的方式完成。
d.安全性:末端执行器设计应考虑安全因素,以防止误操作或对人员和环境造成伤害。
2.常见类型的末端执行器:a.机械手爪:机械手爪是最常见的末端执行器之一,具备可调节的爪状结构,可以通过夹爪抓住和释放物体。
机械手爪可以根据抓取对象的形状和尺寸进行调整。
b.吸盘:吸盘末端执行器使用真空或气流来固定和释放物体。
它适用于平面或光滑工件的抓取任务,如玻璃板、金属板等。
c.刀具:刀具末端执行器可以用于加工、切割和打磨任务。
它们可以是旋转刀具、磨石或剪切器等。
d.喷嘴:喷嘴末端执行器用于涂覆、喷涂和喷射任务。
它们可以是喷枪、喷嘴或涂装墨斗等。
3.末端执行器的相关应用:a.工业自动化:末端执行器在工业自动化中广泛应用。
例如,机器人装配线上的机械手爪可以用来抓取和放置零件,以实现自动化装配。
b.医疗领域:末端执行器可以用于手术机器人和康复机器人中。
例如,手术机器人的末端执行器可以用于精确的手术操作,康复机器人的末端执行器可以用于辅助患者进行康复训练。
c.服务机器人:末端执行器可以用于服务机器人中,用于抓取和搬运物体,如无人送餐机器人或清洁机器人。
d.农业领域:末端执行器可以用于农业机器人中,用于收割、种植和灌溉等任务。
总结:末端执行器的设计在机器人系统中起着重要的作用。
一种水果采摘机器人末端执行器

一种水果采摘机器人末端执行器一种水果采摘机器人的末端执行器随着科技的不断进步,机器人技术正在越来越广泛地应用于各种领域。
其中,水果采摘领域也不例外。
水果采摘机器人的末端执行器是实现采摘水果的关键部分,它能够通过精确的操作,快速、高效地完成水果采摘任务。
一、末端执行器的设计水果采摘机器人的末端执行器一般采用机械手或机器人手臂的设计。
它通常由多个关节组成,具有高度的灵活性和操作性。
末端执行器可以通过感应器来感知水果的位置和形状,并通过复杂的算法来确定最佳的采摘路径。
二、末端执行器的操作流程1、感应水果:末端执行器使用感应器来探测水果的位置和形状。
这些感应器可以是光学相机、红外相机或深度相机等。
通过对采集到的图像进行处理和分析,可以确定水果的精确位置和大小。
2、路径规划:一旦确定了水果的位置,末端执行器将通过复杂的算法计算出最佳的采摘路径。
这些算法通常考虑多种因素,如机械手的灵活性、水果的位置和形状等。
3、采摘水果:在规划好路径后,末端执行器将开始执行采摘操作。
它可以使用夹持器或剪刀等工具来抓住或切断水果的茎干。
在采摘过程中,末端执行器需要保证水果不受损伤,同时也要保证机械手的操作安全。
4、放置水果:一旦采摘完成,末端执行器将把水果放置到指定的位置。
这个位置可以是篮子、箱子或其他容器。
放置过程中,末端执行器需要保证水果的稳定性和整齐性,以便后续的处理和运输。
三、末端执行器的优势1、高效性:末端执行器可以快速、准确地完成采摘任务,大大提高了采摘效率。
2、准确性:通过感应器和算法的配合,末端执行器可以精确地定位水果的位置和形状,从而保证采摘的准确性。
水果采摘机器人末端执行器的研究进展随着现代农业技术的不断发展,自动化和机器人技术在农业生产中的应用越来越广泛。
其中,水果采摘机器人在提高生产效率、降低劳动成本、提升水果质量等方面具有明显优势。
然而,采摘水果的精度和效率在很大程度上取决于机器人末端执行器的设计和功能。
采摘机器人末端执行器研究现状与展望

刚性结构 的现状 , 以柔性设 计为 目标 , 将柔性 控制应 用 于系统中, 实现采摘过程 的精确控制并减少对果实
的损 伤 。 2 增 强 复 杂环 境 的适 应 能 力 : 变 果 蔬 的传 统 栽 ) 改 培模 式 , 更 好 的栽 培 方 式 分 开 果 实 与 茎 叶 , 用 以利 于 机 器人 的采 摘 ; 强设 备 的感 知 能 力 , 增 改进 动 作 原 理 , 加 强新 型 附 件 的 应 用 研 究 来 提 高 对 复 杂 环 境 的适 应 能力。
1 1 1 非夹 持类 .. 1 直接 切 断式 。这类 末 端 执 行 器直 接 剪 断果 梗 , )
人 主要 由机 械 手 、 端 执 行 器 、 觉 系 统 和 行 走 装 置 末 视 等组 成 。机 器 人 移动 到 目标 位 置 之后 , 端 执 行 器 最 末 终完 成 采摘 动作 , 且 多 数 果 蔬 的 外 表 较 为 脆 弱 , 并 形 状及 生 长状 况 复 杂 , 因此 末 端 执 行 器 的设 计 直 接 关 系 到能 否 准确 高 效 地完 成 采 摘 。 目前 , 内外 已经 掀 起 国 了研 究 采摘 机 器 人 的热 潮 , 别 是 日本 、 国 、 兰 等 特 美 荷 发达 国家 一直 走 在采 摘 机 器 人 研 究 的前 列 , 后 开 发 先 了各 种 果蔬 采 摘 机器 人 及 其 末 端 执 行 器 。 近 年来 , 国 内各 类 果 蔬 采 摘 机 器 人 方 面 的研 究 也 取 得 一 定 的 成 果 , 后研 制 了茄 子 、 莓 、 茄 、 果 等 采 摘 机 器 人 先 草 番 苹
3 扩展设备的通用性 : ) 开发可 以采摘形状相 近果 实的末端执行器 , 如可以采摘苹果 、 、 橙 番茄等球形 或 类球形水果 和茄子 、 黄瓜等长条 形水果 , 在小范 围内
《采摘机器人末端执行器设计与抓取特性研究》
《采摘机器人末端执行器设计与抓取特性研究》一、引言随着科技的进步和农业现代化的推进,采摘机器人成为了提高农业生产效率和减少人工成本的重要工具。
而末端执行器作为采摘机器人的核心部分,其设计和抓取特性直接影响着机器人的工作效率和准确性。
因此,对采摘机器人末端执行器设计与抓取特性的研究具有重要的现实意义。
二、采摘机器人末端执行器设计1. 设计要求与目标采摘机器人末端执行器设计需满足以下要求:适应不同形状和大小的果实,确保抓取的稳定性和准确性,同时要保证轻便、耐用和低能耗。
设计目标是通过精确的机械结构和智能控制系统,实现自动化、高效化的果实采摘。
2. 结构设计末端执行器主要由夹持机构、驱动机构和控制机构三部分组成。
夹持机构负责与果实接触并实现夹持动作,驱动机构提供夹持动作的动力,控制机构则负责整个执行器的控制与协调。
其中,夹持机构的设计是关键,需根据果实的形状和大小进行定制化设计。
3. 材料选择执行器的材料选择需考虑其强度、耐磨性、耐腐蚀性以及轻量化等因素。
常用的材料包括高强度合金、工程塑料等。
此外,为保证执行器的耐用性,还需对关键部件进行表面处理,如喷涂防腐漆等。
三、抓取特性研究1. 抓取稳定性研究抓取稳定性是评价末端执行器性能的重要指标。
通过优化夹持机构的结构和材料,以及合理设置夹持力的大小和方向,可提高抓取的稳定性。
此外,还可通过引入视觉系统和力觉传感器,实现精确的定位和力控制,进一步提高抓取的稳定性。
2. 抓取速度与效率研究为提高采摘机器人的工作效率,需对末端执行器的抓取速度与效率进行研究。
通过优化驱动机构的传动方式和控制策略,可实现更快的夹持动作和更高的工作效率。
同时,结合智能控制算法,可实现多任务并行处理和优化调度,进一步提高机器人的工作效率。
四、实验与分析为验证设计的合理性和抓取特性的有效性,我们进行了大量的实验和分析。
实验结果表明,优化后的末端执行器能够适应不同形状和大小的果实,具有较高的抓取稳定性和工作效率。
1末端执行器的设计

1末端执行器的设计1.1末端执行器控制系统如图1所示,为末端执行器控制系统的原理图,其工作原理是:由上位机接收来自传感器的信号,发出启动指令,启动指令驱动伺服电动机工作,带动执行机构工作,通过安装在手抓末端的传感器实时检测夹板的为止信息,将其反馈给上位机,在反馈信号的作用下,执行机构能够准确的到达指定位置。
在末端执行器定位完成后,末端执行器开始动作,旋转以及实现对物料的放置。
同时,在控制循环系统的作用下,不停地对物料进行有规律的码垛。
图1 末端执行器控制系统原理图1.2末端执行器的选型末端执行器是码垛机器人的一个非常重要的组成部分,它装在操作手腕的前端,用以直接抓取码垛物料,并进行移动和码垛。
根据被码垛物料的种类和形状,如码垛物料有箱形、袋形、圆形,因此,为了使用被码垛物料的要求,其末端执行器的结构也各不相同。
如图1所示,最左边的是叉形末端执行器,一般用于比较重、大的袋装物料(如肥料袋等);中间的是真空吸盘形末端执行器,一般用于块状物料(如玻璃板等);最右边的是夹板形末端执行器,一般用于尺寸较大的箱形、袋形物料(如冰箱包装箱等)。
图1 几种常见的末端执行器结构图在本课题中,用到了第三种夹板型末端执行器,配合一个推臂用于装取袋装的码垛物料。
其优点在于:能够快速的完成物料的装取任务,方便接下来的搬运以及码垛任务,并且不会造成包装袋的损坏,避免了包装物料的流失,效率高,控制简单等。
从驱动方式上来看,末端执行器可以采用电力驱动、液压驱动以及气压驱动。
下面是几种驱动方式的优缺点。
电力驱动:精确度高,调速方便,但推力较小,大推力成本高。
液压驱动:体积小,调速方便,但系统成本高,可靠性差,维修保压麻烦。
气压驱动:成本低,动作可靠,不发热,无污染。
但推力偏小,不能实现精确的中间位置调节,通常是两个极限位置使用。
因为实际中,末端执行器抓取以及推臂的推送物料不需要太精确的过程控制,并且考虑到造价以及维修费用的问题,末端执行器一般选用气压驱动。
末端执行器毕业设计

末端执行器毕业设计引言末端执行器是机器人学中的重要组成部分。
它位于机器人的末端,负责完成各种任务,比如抓取、搬运、装配等。
在毕业设计中,我们将设计一种末端执行器,并研究其性能和应用。
目标本毕业设计的目标是设计一个具有多功能的末端执行器,能够完成不同的任务。
同时,我们还将研究该末端执行器的关键性能指标,并探索其在工业自动化、医疗护理等领域的应用。
设计方案1. 机械结构设计末端执行器的机械结构设计是设计过程中的重要环节。
我们将采用三维建模软件进行设计,并考虑以下几个方面:•结构稳定性:保证末端执行器在操作过程中具有足够的稳定性,以防止意外发生。
•线性运动范围:确保末端执行器在各个方向上具备足够的线性运动范围,以适应不同任务的需求。
•承载能力:考虑末端执行器需要承载的最大负荷,从而确定机械结构的强度和稳定性。
2. 电气控制设计末端执行器不仅要具备机械结构的设计,还需要合适的电气控制设计。
我们将采用微控制器进行电气控制,并考虑以下几个方面:•电机驱动:选择适当的电机类型,并设计合适的电机驱动电路。
•传感器应用:利用合适的传感器来监测末端执行器的位置、力量等信息,并输出给微控制器进行相应的控制。
•通信接口:为了方便控制和监测,我们将设计合适的通信接口,如串口或无线通信。
3. 控制算法设计末端执行器的控制算法设计是本设计中的关键环节。
我们将研究现有的控制算法,并根据末端执行器的特点和任务需求进行适当的改进和优化。
•位置控制算法:设计合适的位置控制算法,保证末端执行器能够准确地到达目标位置。
•力控制算法:针对负载变化较大的任务,设计合适的力控制算法,确保末端执行器能够稳定地抓取和搬运物体。
•路径规划算法:针对复杂的任务情境,设计合适的路径规划算法,使末端执行器能够高效地完成任务。
性能测试为了验证末端执行器的性能,我们将进行一系列的性能测试。
测试内容包括:•位置精度测试:通过设定不同位置,测试末端执行器是否能够精确到达目标位置。
机器人末端执行器设计与控制研究

1.高刚性和高精度
机器人末端执行器要求高刚性的主要原因是为了保持机械结构的稳定性。高精度便于机器人进行精细操作。这两方面的要求往往不一定完全一致,需要在设计时做出妥协。
2.小尺和轻重量
机器人末端执行器的小尺寸和轻重量也是机器人制造中一个重要的指标。尺寸小轻盈的机器人更容易适应复杂的环境,也更容易完成更微小的操作。
2.基于机器学习
随着人工智能技术的持续创新,机器学习在机器人末端执行器的控制中也被广泛应用。通过机器学习的方法,使机器人可以自主根据具体场景进行操作,大大提高机器人的自适应性。
3.基于传感器
传感器是机器人末端执行器的基础,能够对物体、距离、形状、材料等信息进行感知和处理,因此,采用多种不同的传感器适应多样化的场景。同时,传感器也是实现闭环控制系统的必备条件之一。
3.多功能性
机器人末端执行器需要灵活多变,就像人类的手臂一样,在不同的场景下需要完成不同的任务。因此,设计时需要考虑多样化的使用场景。
4.可靠性
机器人末端执行器的可靠性也是设计中的一个重要因素。如今,机器人越来越广泛应用于人类的日常生活和工作场景中,可靠性对于机器人的安全性和稳定性至关重要,因此纠错功能和高可靠性应当成为设计方案中的一个重要组成部分。
机器人末端执行器的研究成果具有广泛的应用价值。例如,它可以应用于智能制造领域,实现无人化控制生产线的自动化、连续化、高效化。此外,还可以将机器人末端执行器应用于医疗健康领域,例如手术机器人,具备高精度的控制和操作能力,可以做到微创手术,有效降低病人手术风险和恢复时间。此外,机器人末端执行器还可以应用于危险环境下的人员操作,例如辐射、火灾、水下作业等,可以避免人员受到伤害。
三、机器人末端执行器的控制方法
果蔬采摘机器人末端执行器的结构组成现状分析

果蔬采摘机器⼈末端执⾏器的结构组成现状分析采摘机机器末端执⾏器研究现状分析末端执⾏器是果蔬采摘机器⼈的另⼀重要部件,它的设计通常被认为是机器⼈的核⼼技术之⼀。
⼀般果蔬的外表⽐较脆弱,它的形状及⽣长状况通常复杂。
在机器⼈采摘过程中果蔬外表发⽣损伤的原因主要有:①果蔬位置识别或机械臂控制规划有误,导致末端执⾏器划伤或刺伤果蔬外表;②末端执⾏器夹持或抓取⼒过⼤,压伤果蔬外表;③末端执⾏器抓持不稳定导致果蔬掉落,与地⾯或其他坚硬物体接触⽽碰上外表。
作为采摘机器⼈的执⾏装置,末端执⾏器应根据不同果蔬果实的⽣物、机械特性及栽培⽅式,采取不同的专⽤机构以提⾼采摘的成功率并减⼩对果蔬的损伤为主要⽬标。
⼀般集成两项功能:①检测果实的位姿,为执⾏机构提供导航信息;②以适当⼒度夹持果实或果梗并剪切果柄,完成采摘动作。
在动作上通常包括获取果实和果实与植株分离两部分。
为了安全与⾼效的完成采摘动作,末端执⾏器还可能加⼊吸盘、推杆等附加机构以及各类传感器以完成准确采摘并减⼩损伤。
1.获取⽅式获取和分离果实是采摘机器⼈末端执⾏器必须实现的两⼤关键动作,即⾸先通过抓取、吸⼊、勾取等⼀定⽅式获取果实,再通过扭断、剪切等不同⽅法完成果实与果梗的分离。
从⽬前发表的⽂献来看,获取果实的⽅式主要归为⾮夹持类和夹持类两种。
分离果实与果梗的⽅式有传统的扭断、折断、拉断以及通过剪⼑或切⼑进⾏切断,还有新式的热切割⽅法等。
1.1.直接切断式这类末端执⾏器⼀般都是直接剪断果梗,由于其本⾝不能实现果实的回收,因此剪掉的果实直接落地或者落⼊事先放置的果箱中。
例如,⽇本开发的甜椒采摘机器⼈末端执⾏器、茄⼦采摘末端执⾏器、番茄采摘末端执⾏器、美国柑橘采摘末端执⾏器均为此类结构,如下图所⽰。
1甜椒采摘末端执⾏器2茄⼦采摘末端执⾏器3番茄采摘末端执⾏器这类末端执⾏器的结构更能较为简单,适⽤于植株冠层内枝叶较稀疏,且果实具有⼀定抗冲击能⼒的果蔬。
对于果梗较短的植株,往往造成⽆法剪切或碰上果实的现象,对于冠层空间⽐较复杂的植株,果实下落过程中很容易被碰上,并且下落的位置也不定,影响果实的回收。
工业机器人机械手末端执行器设计与控制

工业机器人机械手末端执行器设计与控制工业机器人是现代制造业中不可或缺的重要设备,而机械手末端执行器则是工业机器人的核心组成部分。
它的设计和控制直接影响着工业机器人的性能和效率。
本文将重点讨论工业机器人机械手末端执行器的设计与控制。
一、机械手末端执行器的设计机械手末端执行器是机械手用来完成工件抓取、放置等操作的部件。
它通常由机械结构和驱动系统两部分组成。
在机械结构设计中,需要考虑到机械手的使用场景和工件的特点,以确定合适的末端结构。
比如,如果需要抓取重物,末端结构应具备足够的力量和稳定性;如果需要进行精细操作,末端结构则需要更好的灵活性和精度。
同时,机械结构的材料选择和制造工艺也是设计的重要因素。
合适的材料可以提高机械手的耐久性和抗磨性,而先进的制造工艺则可以提高结构的精度和稳定性。
在驱动系统设计方面,需要选择合适的执行器来驱动机械手末端执行器。
常见的驱动方式包括电动、液压和气动。
不同的驱动方式有着各自的特点和适用场景。
电动执行器具有精度高、响应快的优点,适用于精细操作;而液压和气动执行器则适用于高力矩和高速度的操作。
二、机械手末端执行器的控制机械手末端执行器的控制是指通过控制系统来实现对机械手末端执行器的运动和动作的控制。
在控制系统设计中,需要考虑到机械手末端执行器的运动规划和轨迹控制。
运动规划是指确定机械手末端执行器在三维空间中的位置和姿态,以完成特定的操作。
轨迹控制则是指通过控制执行器的运动轨迹,使其按照设计要求进行工作。
为了更好地实现机械手末端执行器的控制,通常会采用传感器来获取执行器的状态信息,如位置、力量和速度等。
这些传感器可以提供实时的反馈信息,帮助控制系统准确地感知执行器的运动状态,从而实现精确的控制。
此外,控制系统还需要考虑到机械手末端执行器与环境之间的交互。
比如,在与人工操作员共同工作的场景中,机械手末端执行器需要具备人机协作能力和安全保护措施,以避免潜在的安全风险。
三、机械手末端执行器的发展趋势随着智能制造和人工智能技术的不断发展,工业机器人机械手末端执行器也在不断演进。
串番茄采摘末端执行器的设计与夹持实验

串番茄采摘末端执行器的设计与夹持实验段红燕,李世杰,杨 浩(兰州理工大学机电工程学院,兰州 730050)摘 要:基于串番茄生长特性和采摘要求,设计了一种适应于采摘成串番茄的末端执行器。
基于螺旋理论,建立了夹持接触力学模型,分析了夹持的力封闭性;同时,建立了稳定夹持模型,对夹指的可靠夹持力进行了分析,得出夹持力F≥8.24N。
制作了物理样机,并对直径为3~8mm的串番茄母枝进行了负重干扰性能的夹持实验,实验结果表明:夹指所能承受的动态负重随母枝直径的增大而增大,最小动态负重为1.015kg,完全满足采摘串番茄时的夹持能力需求。
关键词:末端执行器;夹持;采摘;串番茄;螺旋理论中图分类号:S225;TP242 文献标识码:A文章编号:1003-188X(2021)01-0057-050 引言串番茄又名穗番茄,是近年来流行于国内外市场的一种成串收获上市的新型番茄品种,由于其果实颜色、果穗货架寿命、果实硬度和果实品质等方面很多突出特点,深受消费者的喜爱[1]。
随着我国科技的发展,机器人采摘逐渐代替了人工来改善劳动条件,提高工作效率,降低了采收成本。
机器人通过末端执行器对果蔬进行采收,末端执行器是直接与果蔬接触的重要部件[2],对果蔬的采摘效率、采摘损伤率及采摘范围都有重要的影响。
由于果蔬的生长习性、采摘要求的差异,国内外学者已对各种果蔬的采摘末端执行器进行了大量的研究[3]。
针对番茄、苹果、柑橘等球状果蔬的采摘,学者们采用了拟人指、吸盘式及咬合式等方式的末端执行器[4-7],而对成串采摘夹持母枝类的末端执行器研究较少。
为此,以采摘成串的串番茄为研究对象,设计了针对成串采摘末端执行器,基于力螺旋理论来分析了手指的力封闭性,同时对夹持力进行了分析,并制作了物理样机,进行了负重干扰性能的夹持实验。
1 末端执行器的设计收稿日期:2019-07-05基金项目:国家自然科学基金项目(51665028);甘肃省兰州市科技局基金项目(2015-RC-44)作者简介:段红燕(1977-),女,河北邯郸人,副教授,硕士生导师,(E-mail)duanhy@lut.edu.cn。
机器人的手指和末端执行器的设计和应用

机器人的手指和末端执行器的设计和应用近年来,机器人的发展迅猛,越来越多的机器人已经可以替代人类完成一些简单但重复的任务。
然而,机器人只有在手指和末端执行器的设计上得到足够的改进,才能成为一个真正实用的工具。
在本文中,我们将探讨机器人手指和末端执行器的设计和应用。
一、机器人手指的设计和应用1. 手指的形态和数量机器人的手指形态和数量因其作业环境而异。
工业矫形手对于加工和装配任务是非常常见的。
例如,对于汽车制造,矫形手的数量通常在3到6个之间,并具有一定的可变性。
而对于其他一些需要触摸到细小物体的工作,如医疗和科学方面的任务,手指的数量可能要增加到10个以上。
此外,手指的形态也因应用而异。
例如,对于一些需要操作复杂零件的任务,通常需要一些特殊的手指设计。
2. 手指的力学特性机器人的手指具有与人类手相似的力学特性,即强而有力,但同时也具有柔韧性。
强大的手指可以拥有几百达希的扭矩,这样机器人就可以轻松完成许多精密机器人操作。
同时,柔软的手指可以更容易地处理装配环境中的不规则和难以操作的零件,从而提高了机器人的工作效率。
3. 手指的控制机器人的手指控制需要微精度的位置控制和力控制,通常需要采用高精度的控制系统来控制手指的运动。
现代机器人大多使用电子控制系统,包括传感器、调节阀和执行器。
通过这些元件的控制,机器人可以精确地调整其手指的位置和力度,进而通过触摸来进行识别和操作。
二、末端执行器的设计和应用1. 末端执行器的运动方式机器人的末端执行器决定了机器人的可操作范围和运动方式。
大多数末端执行器是通过旋转方式进行运动,因为这种方式可以提供更好的可控制性和更高的精度。
同时也有一些末端执行器采用了线性运动的方式进行操作,例如在矫形手和其他需要加工任务中。
2. 末端执行器的夹紧力末端执行器的夹紧力是执行器设计中的一个关键因素。
机器人的夹紧力应该足够强大,可以紧紧地抓住零件,而不会在运动的过程中失去对其的控制。
同时,这种力度也应该是可调节的,可以根据不同工件的要求进行调整。
农业机器人末端执行器的特点

农业机器人末端执行器的特点农业机器人的末端执行器是指连接在机器人末端的工具或装置,用于执行具体的农业操作。
这些执行器在农业机器人中扮演着关键的角色,其特点影响着机器人的性能和适用性。
以下是农业机器人末端执行器的一些特点:
1.多功能性:农业机器人的末端执行器通常具有多功能性,能够执行不同的农业任务。
例如,可能设计成可以用于种植、喷洒、收割等多种农业操作。
2.智能控制:现代农业机器人的末端执行器通常集成了智能控制系统,可以通过传感器和算法实现自动化、智能化的操作。
这有助于提高机器人在不同环境下的适应性和效率。
3.精准性:末端执行器需要具备高精度的执行能力,以确保农业任务的准确完成。
这可能涉及到精准的操控、定位和感知技术的应用。
4.适应性:农业机器人末端执行器需要具备一定的适应性,能够适应不同的农业场地、作物和气候条件。
可调整的设计和灵活的操作方式有助于适应多样化的农业环境。
5.耐久性:农业机器人在户外工作,末端执行器需要具备足够的耐久性,能够抵御恶劣天气、土壤条件和其他环境因素的影响。
6.安全性:安全性是农业机器人设计中的重要考虑因素。
末端执行器应具备安全设计,以防止与人类、动物或其他物体发生碰撞,并减小潜在的风险。
7.易于维护:为了确保长期可靠的运行,末端执行器的设计应考虑易于维护和维修。
这包括模块化设计、易更换的零部件等。
8.节能环保:在设计中考虑末端执行器的能源效率和环保性能,
以符合现代农业对可持续性的要求。
农业机器人末端执行器的特点直接关系到机器人的实际应用效果和经济效益,因此在设计和选择时需要仔细考虑各种因素。
末端执行器的设计

1末端执行器的设计末端执行器控制系统如图1所示,为末端执行器控制系统的原理图,其工作原理是:由上位机接收来自传感器的信号,发出启动指令,启动指令驱动伺服电动机工作,带动执行机构工作,通过安装在手抓末端的传感器实时检测夹板的为止信息,将其反馈给上位机,在反馈信号的作用下,执行机构能够准确的到达指定位置。
在末端执行器定位完成后,末端执行器开始动作,旋转以及实现对物料的放置。
同时,在控制循环系统的作用下,不停地对物料进行有规律的码垛。
图1 末端执行器控制系统原理图末端执行器的选型末端执行器是码垛机器人的一个非常重要的组成部分,它装在操作手腕的前端,用以直接抓取码垛物料,并进行移动和码垛。
根据被码垛物料的种类和形状,如码垛物料有箱形、袋形、圆形,因此,为了使用被码垛物料的要求,其末端执行器的结构也各不相同。
如图1所示,最左边的是叉形末端执行器,一般用于比较重、大的袋装物料(如肥料袋等);中间的是真空吸盘形末端执行器,一般用于块状物料(如玻璃板等);最右边的是夹板形末端执行器,一般用于尺寸较大的箱形、袋形物料(如冰箱包装箱等)。
图1 几种常见的末端执行器结构图在本课题中,用到了第三种夹板型末端执行器,配合一个推臂用于装取袋装的码垛物料。
其优点在于:能够快速的完成物料的装取任务,方便接下来的搬运以及码垛任务,并且不会造成包装袋的损坏,避免了包装物料的流失,效率高,控制简单等。
从驱动方式上来看,末端执行器可以采用电力驱动、液压驱动以及气压驱动。
下面是几种驱动方式的优缺点。
电力驱动:精确度高,调速方便,但推力较小,大推力成本高。
液压驱动:体积小,调速方便,但系统成本高,可靠性差,维修保压麻烦。
气压驱动:成本低,动作可靠,不发热,无污染。
但推力偏小,不能实现精确的中间位置调节,通常是两个极限位置使用。
因为实际中,末端执行器抓取以及推臂的推送物料不需要太精确的过程控制,并且考虑到造价以及维修费用的问题,末端执行器一般选用气压驱动。
基于气压传动的苹果采摘机器人末端执行器的设计

科技风2021年3月D0I:10.19392/ki.1671-7341.202108005基于气压传动的苹果采摘机器人末端执行器的设计赵竹辽宁农业职业技术学院辽宁营口115009摘要:随着我国苹果种植规模化的发展,苹果采摘机器人成为苹果机械化生产环节中最重要的一环。
本文以苹果为采摘对象,研究苹果的物理性质,分析苹果采摘末端执行器组成和工作原理,结合当前苹果采摘末端执行器结构存在的不足,设计一款基于气压传动原理的苹果采摘末端执行器。
关键词:气压传动;苹果采摘;末端执行器Design of end-Effector of Apple Picking Robot based on pneumatic transmissionZhao ZhuLiaoning Agricultural Technical College LiaoningYingKou"5009Abstract%With the large-scale development of apple planting in China,apple picking robot has become the most important link in the mechanization of apple production.Taking applet at the picking object,this papeo studies the physical propertiec of applet,analyzec the composition and working principle of the apple-picking end-effectoo,and desions an apple-picking end-effector based on the pneumatic transmission principle in combination with the deficiencies of the current apple-picking end-effectoo structure.Key words%Pneumatic transmission;Apple picking;End-Effector我国是世界最大的苹果种植国,产量和面积均占世界续表50%以上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
技术推广农用机器人末端执行器设计方法探讨韦家增(上海师范大学信息与机电工程学院,上海200234)摘要:本文结合农业生产的环境特点和要求,根据机器 人谢原JS,从材料选择到电机、及手腕谢博各方面进行初步探讨,为棚灘人的*«^册樹織施关键词:农用机器人;末端执行器;机械手农业生产环境恶劣、工作繁重、重复无趣。
为减轻农业 从业人员的劳动强度,世界各国都在加紧研发适合农业生 产使用的农用机器人。
其与工业机器人相比虽然有许多相 似之处,也有其自身的特点。
目前,农用机器人以移动机器 人为主,主要有轮式移动机器人、履带式移动机器人、足式 移动机器人、跳跃式移动机器从蛇形移动机器人等。
各 种移动式机器人都有其各自独特的优越性,比较而言轮式 移动机器人速度快、运动平稳、承载能力强大,而且轮式移合素养。
在培训过程中应为推广人员提供与农户交流的机 会,提高其实践能力,并且还要积极学习相关的政策法规,积极请教专家学者,不断弥补自身缺陷,从而为农民提供更 加高质量的服务。
另外,还应为农机推广技术人员提供进 修的机会,开阔其视野,接触更加专业的人员,同时还可定 期组织技术骨干进人企业观摩和学习,丰富农机推广人员 经验,并促使其在新时代得到更多的启发。
2.9部门建设农机推广部门的建设工作可从2个方面人手。
首先是 办公设施。
需要根据部门规模配置合适的设施,确保在节约 资金的同时符合建设标准。
其次是技术与机具。
要求积极 引进先进技术及设备,并明确各类技术与设备的功能、特点 及优势,确保在推广过程中能够更具针对性,减少工作失误。
构建信息服务网络。
要求相关部门定期收集农机市 场信息,并对信息进行整合与分析,从而明确市场动态,并预 测未来的麵趋势,确保能高质量的市纖息服务。
2.10资金筹措不论是技术推广还是建设示范基地,最为关键还是资 金,由于技术推广所需资金额度较大,如果仅依靠财政补发, 显然获取难度较高,因此需要积极寻找筹资人,找到双方互 惠互利的合作点[4]。
最佳的合作人选是负责生产与销售农 机的商业人员。
在推广过程中可举办农机试用会,向农民 全方位展示农机用途与使用效果,吸引农民关注。
3 推广阻碍及策略目前在创新技术推广方式过程中遇到了许多阻碍,主 要体现在以下几个方面。
一是缺少政策支持,导致推广风险动机器人还辟自重轻、机构简单以及工作效率高等优点,在农业领域有着广阔的应用前景及不可撼动的地位[1]。
1农用机器人整体设计农用机器人鉢上都是在露天环境工作,不仅有灰尘、风沙,还会有泥水働,机器人的故障報高。
甚至没有三 相电源、液压站及气压源等条件。
加之中国的农副产品附加 值不高,为使农用机器人在市场上有较高的竞争力,价格是 必须考虑的主要因素。
因此与一般工业机器人比较,农用机 器人在设计上必须注意以下5个方面:(1)农用机器人结构 尽量简单,减少舱机使用数量,动作精度可以相对较低,以减 少制造成本。
⑵加强主要位置的密闭性保护,减少风沙、污泥等侵謂机器人元件的损害。
⑶各机构之间采用模较大,影响了人员的积极性,推广动力不足。
二是技术落后 及资金短缺问题并未彻底得到解决,严重妨碍了创新工作的 开展,并且农技人员薪水较低,难以建立起稳固的推广队伍。
三是尽管农机推广宣传工作逐步开展,并且探索了多个渠 道,但结合实际情况来看,推广效果较差,处于滞后状态。
基于以上存在的问题,当前需要尽快出台激励政策,并 建立实践平台’实现生产、研究等工作的一体化开展,同时还 应建立经费保障机制,提高人员待遇,促歡员更加积极地投入到推广工作的开展中。
麟,应树立推广机构的良好形 象,选择业务水平较高的人员进人一线工作,获得农民认可。
4 结束语总而言之,为了促使传统农业生产模式向现代化农业 转变,除了研究与开发先进的农机化技术之外,还应不断寻 求更多的推广渠道,从合作、培训、筹集更多经费等方面人 手,为农机推广提供有力支持,同时还要让农民认识到农机 化技术的真正价值,确保在推广的同时获得农民的认可。
参考文献:[1 ]辛太国,战桂丽.新形势下农机化推广发展现状、问题及对策[J].农机使用与维修,2014(10):7-10.[2]孙国军.浅谈新形势下农机推广工作的新思路[J].河北农机,2015(9):20-21.[3 ]关雪寒.浅谈新形势下吉林市农机技能培训与技术推广[J].农业机械,2014(21):44-45.[4 ]刘庆,王晓雷.浅谈建设县乡农机推广体系的有效措施[J].农业技术与装备,2013(20):67-68.(收稿日期:2018-12-06)技术推广魏册,通过机械装配联接和总线働等施融合为4整体,降低机器人维护成本。
(4)尽量使用铝合金材料,或 不镑钢材料制作,増加机器人的抗锈蚀能力。
对于负荷较小 的机器人,可使用塑料、树脂等材料,减少材料成本“5)由于农业生产季节性很强,春种、秋收、夏除草。
制作可更换的 机械稍或夹持器等构件,增加机器人的用途。
2 手腕结构设计机器人手腕是连接末行器和手臂的重要组成部分,决定机器人作业灵活性的关键部件,具有传动系统结构复 杂、装配要求高等特点。
为了使机器人的夹持器能够处于空 间的任何方向,机器人腕部应能够绕X、Y、Z3个坐标轴转 动,即3个旋转自由度。
但为了简化农用机器人结构,根据 麵情况需要,机器人腕部通常只需绕2个坐标轴转动。
和 人的手腕一样,机器人手腕可以绕其手臂轴线转动,以及绕 着与手臂轴线垂直的另一轴线转动,S卩二自由度手腕。
还有 些机器人手腕甚至只能绕其中一W线转动,即单自由度手 腕。
这种单自由度手腕结构简单、操作容易、制作成本低,非 常适合在农用机器人上使用。
由于手腕位于臂部最前端,它 的静动载荷都由臂部承受。
因此,在腕部设计时必须尽可能 结构紧凑、重量轻。
由于腕部重量对臂部电机产生的力矩与 臂长成正比,对于臂长较大的机器人,也可以将手腕的驱动 安装在手臂的后端,通过链轮传动操作,减少其对邦的负荷。
虽然手腕的自由度越多手腕越灵活,手腕的活动空间就 越大,但自由度越多结构就变得越复杂,使得操作控制困难,增加了制造成本’也增加了手腕的重量。
因此,手腕的自由 度应该与实际应用相一致,并尽可能简单。
3 机械手结构设计机默手部是机器人最重要的执行构件,简称机械手。
机械手能模仿人手的某些动作,根据程序控制抓取、搬运物 体,操作工具。
按驱动方式、运动轨迹以及用途等分类,机 械手有不同的类型。
如按驱动方式分类,有液压驱动、气压 驱动、电驱动以及机械驱动等等。
工业机器人中应用的机械手多为双指头爪式,按其手 指的运动可以分为平移型和回转型。
农用机器人的机械手 与工业机器人的鉢相似,但工业机器人的抓取对象通常都 有确定的尺寸,设计相对简单。
农用机器人抓取对象的状态 有时要复杂得多。
例如采摘机器人,可以采摘黄瓜、柑橘、青 椒、西红柿、草莓等,也可采摘苹果、荔枝、麵桃等。
机器人 要能采摘不同性质、不同大小和形状的水果。
而且抓取力要 适中,抓取力过大会损坏抓取对象,抓取力过小导致抓不住。
这就要求机器人的视觉感知、路径规划等智能控制系统的配 合,也要求机械手的设计与采摘对象相适应,避免损伤采摘 对象,从而提高工作效率。
机械手同样位于臂部最前端,应 尽可能使其结构简单和紧凑,质量轻,以减轻手臂的负荷。
4驱动方式的选择工业机器常麵液压或气臌魏实现夹持器和手腕的动作,操作简单。
液压系统功率密度大、响应快、噪 声小,但液压站成本高,而气压源要便宜得多。
农用机器人一般流动性大,工作场所没有液压站、气压源,如水果采摘 机器人,这时驱动方式可设计为电机驱动,采用齿条、链轮 或轮系传动。
对于有固定工作场所的农用机器人,特别是 负载较大的农用机器人,如养殖机器人,可以考虑使用气压 或液压装置驱动。
与工业机器人比较,农用机器人对实时 反应速度、运动精度和运动速度要求不高,但由于技术人员 缺乏,对其可靠性和价格有较高要求。
有些工作场所没有 三相电源,只能选用单相电电机。
对于有三相电的场所,可 选用三相电供电的电机,其速度比单相电电机快。
对于没 有有线电源的地方,使用有线电机显然不方便,可使用电池 供电的电机。
农用机器人的交流电机一般使用步进电机驱 动。
步进电机驱动系统主要是开环控制,所以精度不高,但 控制容易、维修方便,比较适合农业机器人使用。
另外,末端执行器驱动电机还应具备以下特点:一是响 应速度快,即电机从获得指令信号到完成指令所需要的时 间应尽可能短,提高工作效率;二是末端执行器位于臂部的 最前端,电机也应该体积小、质量小,较大的电机可以放到臂的后端;三是应有一定的调速范围;四是启动转矩应足够 大,转动灵活;五是能够频繁地变速运动,并可承受短时间 的过载;六是能够适应恶劣的外部环境。
5 电机型号的选择农用机器人电机型号选择也视具体应用情况确定。
首 先根据理论分析和仿真等施获得机器人在特定工作任务下的负载情况进行电机选型,然后考虑3个因素:电机最大 扭矩、电机功率和电机最大最小转速。
电机最大扭矩是旋转开始时所需的转矩。
首先减速器 承载的总转矩由克服系统加速度所需的转矩摩擦转矩总和乃以及电机克服负载的转矩3个部分组成。
即:Tg=Z jg+7/ (1)(1)若与电机相连减速器的传动比为,传递效率为,同 步带轮的传递效率为,则电机最大转矩为:(2 ■电机最大转速、最小转速,则电机的最大功率为:户舰=『电机似祖⑶⑶可根据前述公式雅的电机最大撕、电机功率和 电机最大最小转速结果选取合适的电机。
6 结束语本文通过对农业生产环境分析,认为轮式移动机器人 比较适合生产使用,建议构件之间采用模块化设计以及制 造材料应选铝合金、不镑钢或塑料树脂等不易镑蚀的材料。
提出了农用机器人设计应注意事项,对农用机器人电机的 选用、夹持器的册以及手腕的设计进行探讨,为农用机器 人的设计提供理论依据和新方法。
参考文献:[1 ]李格伦,崔天时,刘春莉,等.农用轮式机器人运动控制系iE®rf-Jf^[J].^lfL^:5F^,2018,40(02):192-196.(收稿日期=2018-12-19)。