同步系统设计
基于PLC的卷染机多单元同步控制系统设计
摸屏相 结合的卷 染机控制 系统,针对 卷染机控 制 目标
对 系统 的硬件进行 了设计,并在此基础上对 系统的软
,
式 ( 1 )中, , 1 为伺服 电机 M2牵引辊 角速度 , 为减速 比; 为牵引辊半径 。
件进行 了详 细设计,其 中触摸屏 人机界 面主要 包括登 录界 面、监控界面、参数设置界面、报 警界面等。
是 通过卷绕辊、减速 器 3 、伺服 电动机 M3以及 P L C
控制 系统构成。由于卷绕辊的半径 随着织物巷 绕的 不
断 累积而逐渐增 大,为 了保证卷绕线速 度不变,将光
图 3 巷 柒机 张 力控 制 结 构框 图
电编码 器安装在卷 绕轴 附近, 用于对 线速度 进行检 测,并将 检测 结果传 送到 P L C 中由 P L C完成 线速度 的闭环控 制。轧染单元 由加压辊、减速 器 1 、伺服 电
t h e t r a n s mi s s i o n s p e e d a n d t e n s i o n o f t h e f a b r i c , a n d e n s u r e ha t t t h e c o i l i n g ma c h i n e s y s t e m h a s b e t t e r p e fo r r ma n c e . F i r s t l y , he t c o mp o s i t i o n o f he t c o n ro t l s y s t e m wa s a n ly a z e d i n d e t a i l wi t h hr t e e u n i t t r a n s mi s s i o n s y s t e m, a n d t h e c o n r t o l t a r g e t o f he t c o i l i n g ma c h i n e s y s t e m wa s d e t e r mi n e d . Th e n he t o v e r a l l c o n t r o l me ho t d o f t h e c o i l d y e i n g ma c h i n e wa s d e s i g n e d , a c o n ro t l s y s t e m b a s e d o n P LC a n d t o u c h s c r e e n wa s p r e s e n t e d , a n d t h e h rd a wa re o f t h e c o n t r o l s y s t e m wa s d e s i g n e d . Ba s e d o n t h e h rd a wa re s t r u c t u r e , he t P L C s o f t wa re a n d t o u c h s c r e e n ma n ・ ma c h i n e i n t e r f a c e we r e d e s i g n e d , a n d t h e s i mu l a t i o n r e s u l t s o f i n t e fa r c e re a g i v e n . T h e c o n ro t l s y s t e m wa s r e a s o n a b l y d e s i g n e d , s i mp l e i n s t r u c t u r e a n d s t a b l e i n p e fo r r ma n c e , a n d f a c i l i t a t e s d e b u g g i n g a n d u p g r a d i n g o f l a t e r ma i n t e n a n c e . T h e s y s t e m r e a l i z e d t h e mu l t i u n i t s y n c h r o n o u s i n t e l l i g e n t c o n t r o l o f he t d y e i n g ma c h i n e , g r e a t l y i mp r o v e s t h e a u t o ma t i o n d e g r e e o f he t d y e i n g ma c h i n e , a n d i mp r o v e s he t p e fo r r ma n c e o f he t d y e i n g s y s t e m.
无线同步打铃系统设计

Байду номын сангаас
3软件 设计
3 . 1功 能 设 计 分为计算机( 上位机 ) 软件 、 主控机软件和从控机软件三 部分 。 2硬 件 选型 3 . 1 . 1计算机 软件 i要功能 2 . 1 单 片机 从主控机读取、 编辑并传送 同步时钟 、 时间表 、 铃声音乐及其它 因为要连接多个外部器件 , 引脚需求较多 , 同时最好 自带硬件 信息 。 计算机传送完数据后 , 主控机可独立工作 , 只有再次修改数据 S P I 同步 串行接 口, 所 以选择 目前市场较为 流行 的S TM3 2 单片机 。 的时候才需要计算机 。 3 . 1 . 2 i控 机 软件 i要 功 能 S T M3 2 系列是意法半导 体基 于AR M C o r t e x - M3 内核 , 专 为要 求 高性能、 低成本、 低功耗 的嵌入式系统设计 的3 2 位单片机 , 适合较为 ( 1 ) 接收 由计算机( 上位机) 传送 的同步时钟 、 时间表、 铃声音乐 复杂功能的系统 , 价格较低( 最低1 0 元左右) , 自带 大量 的外设资 源, 等信 息 , 并存储到外部存储器 。 简化了电路设计 , 并且拥有丰富的开发资料及 先进 的硬件单步调试 ( 2 ) 向所有从控机 传送 同步时钟 , 统 一校正从控机的时间 。 机制 。 ( 3 ) 向所有从控机 传送修改 、 新增数 据。 2 . 2无 线 通 信 模 块 ( 4 ) 通过无线数传模 块地 址 , 控 制不同部分从控机实现不 同的 无 线数 据 传 输 模 块 通 常 工 作 于 4 3 3 M Hz 和2 . 4 GHz 的两个I S M 打铃 , 如: 学生 宿合 区 、 教 室区、 图书馆 、 运动场等等 。 频段 。 2 . 4 G Hz 频段传输速率高 , 但穿透性不好 , 易被 阻隔 ; 4 3 3 MHz ( 5 ) 带触摸屏 的L C D 显示器 , 可显示所有信息 , 利用触摸屏可对 的频段特性恰好相反 。 因为 打铃系统需要跨越 多个建筑物 , 并在建 时间、 时间表等信息修 改并传送到从控机 。 3 . 1 . 3 从 控机 软件 i要功 能 筑物 内部通 信 , 所 以考 虑4 3 3 MHz 的频段的产 品。 本设计选用n RF 9 0 5 无线数传模块。 模块可通过软件设置地址 , ( 1 ) 接收主控机的同步时钟 , 并校正 自己的RT C ( 实时 时钟) 。 如 只有匹配本机地址 时才会 接收数据 。 因为n R F 9 0 5 的实 际传 输速率 果主控机失效 , 则根据 已上一次校正时间 , 由自己的R TC 来控制运 约为5 0 k b p s , 适合传输控制信息及少量数据 , 并不能直接传输音质 行 , 直到主控机有效为止 。 为1 2 8 k b p s 及 以上 的mp 3 数据 , 所以不能直接通过无线信道播放铃 ( 2 ) 接收主控机传 送的数据 , 并存储 到外部存储器。 声音乐 , 所 以设计 方案 中需要用 到外 部大容量存储模块 。 ( 3 ) 根据打铃时间表 , 需要打铃 的时候 , 从外部存储器取 出相应 主控机 是无线发射端 , 考虑 使用5 0 0 0 mW( + 3 8 d B m) 功率 的产 的音 频数 据送到音频解码器 , 从而实现 定时打铃 、 播放音乐 。 品, 最大瞬间 电流约为1 5 0 0 mA, 配置 1 5 c m吸盘 天线 , 开阔地离地面 ( 4 ) 显示 日期时间、 当前正在执 行的时间表( 起床、 第X X 节课 , 课 3 米高视距无干扰可通信在3 0 0 0 米以上 , 如果配置高增益天线 , 则通 间休 息 等 等 ) 。 信距 离可 以达 到更 远 。 从 控机是 接收 端 , 使 用小 功率 的型 号( 如 3 . 2主 要 工 作 流 程 + 2 0 d B m) R [ 1 可。 为了避免无线 收发时丢失数据 , 程序主要部分 以中断方式运 2 . 3外部 存储 模 块 大容 量存 储 模块 行, 见 图4 。 n RF 9 0 5 每 次会传送3 2 字节的数据 , 考虑其 中1 6 字节用于 外部存储模 块是一块S D存储 卡( 2 G B 及以上容量 , 取决于多少 传送 同步 时钟信号 , 另外 1 6 字节 用于其它信息传送 , 大量数据需要
基于PLC的液压同步系统的程序设计方法

基于PLC的液压同步系统的程序设计方法在液压系统中,经常要求系统能控制处理多个执行机构同步运行的问题。
下面以笔者为国内某热电厂所设计的由一台PLC和四个电液比例阀组成的系统为例,说明同步系统的组成及程序设计方法。
一、系统组成系统由PLC、电流比例阀、齿轮双齿条油缸及转动执行机构等部分组成。
由PLC控制四个电液比例阀分别驱动四个齿轮双齿条油缸,带动四个执行机构转动。
控制要求规定:四个执行机构转动时,其转动速度应同步,最终的转动位置角度应相同。
系统的PLC选用Koyo SZ-4型产品,其各种模块安装在机架内的不同槽位上,I/O点的地址定义号由该模块所在的槽位决定,八槽机架所安装的模块类型及其地址定义号如图1所示。
图1系统的开关量输入模块选用8ND1型和16ND1型24VDC模块,它们的地址号为1010 ~1077,共56点。
主要用来连接按钮输入信号和接收绝对式旋转编码器发生的编码信号。
开关量输出模块选用8TR1型24VDC模块,它的地址号为~010~Q017,主要用来连接各种指示灯。
模拟量输出模块的型号为2DA2,该D/A模块提供2路-10V~—+10V的输出电压。
Z-CTIF为高速计数模块,该模块用于接收增量式旋转编码器发来的高速脉冲。
比例阀选用的是4WRZ16型先导式电液比例换向阀,其电源形式为直流24V,电磁铁名义电流为800mA。
由PLC输出的-10V~+10V电压控制功率放大器输出-800mA~+800m A电流,输出电流的大小决定了电液比例阀阀口的开度。
系统选用Koyo TRD-NA360PW绝对式旋转编码器作为执行机构转动角度检测反馈元件。
当电液比例阀驱动齿轮双齿条油缸带动执行机构低速转动时,绝对式旋转编码器可将执行机构的转动位置角度实时反馈给PLC。
系统选用的增量式旋转编码器用于发出执行机构转动方向和转动角度大小的指令。
二、程序设计方法1、旋转编码器数据采集的编程方法图2为绝对式旋转编码器和增量式旋转编码器数据采集的部分程序。
多电机同步控制系统的设计

多电机同步控制系统的设计
电机同步控制系统是一种电机控制系统,可同时控制多架电机。
该系统可实现多电机同步驱动,从而更好地控制输出动力。
在这里,我们讨论的是如何设计一个可以控制多架电机的同步控制系统。
1. 首先,需要分析多架电机之间的联系,确定要控制的每个电机的位置信息,以及动力控制精度。
2. 然后,完成电路设计,构建一个适应每个电机的控制系统,同时确定每个电机的输入和输出参数。
3. 接下来需要编写调试电机控制程序,以保证每个电机保持同步处于正确位置,同时控制输出动力。
4. 最后,需要进行测试,确保设计的电机同步控制系统满足用户的要求,以及能够正常运行。
用于电动汽车的永磁同步电机驱动控制系统设计与实现
用于电动汽车的永磁同步电机驱动控制系统设计与实现1. 本文概述随着全球对可再生能源和环保意识的日益增强,电动汽车(EV)作为一种绿色、低碳的出行方式,正逐渐成为未来交通的主要趋势。
作为电动汽车的核心部件,电机驱动控制系统的性能直接影响着车辆的动力性、经济性和可靠性。
永磁同步电机(PMSM)因其高效率、高功率密度和优良的控制性能,在电动汽车领域得到了广泛应用。
本文旨在探讨用于电动汽车的永磁同步电机驱动控制系统的设计与实现,为电动汽车的进一步发展提供技术支持和理论参考。
文章首先介绍了永磁同步电机的基本原理和特性,分析了其在电动汽车应用中的优势和挑战。
随后,详细阐述了永磁同步电机驱动控制系统的总体设计方案,包括硬件平台的选取、控制策略的制定以及关键技术的实现。
在硬件设计方面,文章讨论了功率电子开关的选择、电流传感器的配置以及电机参数的匹配等问题。
在控制策略方面,文章重点介绍了矢量控制、直接转矩控制等先进控制方法,并分析了它们在提高电机性能、优化能量利用等方面的作用。
文章还针对永磁同步电机驱动控制系统中的关键技术问题,如参数辨识、无位置传感器控制、热管理等进行了深入研究和探讨。
通过理论分析和实验验证,文章提出了一系列有效的解决方案,为永磁同步电机在电动汽车中的实际应用提供了有力支持。
文章总结了永磁同步电机驱动控制系统的设计与实现过程中的经验教训,展望了未来在该领域的研究方向和应用前景。
通过本文的研究,旨在为电动汽车的电机驱动控制技术的发展提供有益的参考和借鉴。
2. 永磁同步电机在电动汽车中的应用及优势提高电动汽车效率:永磁同步电机能够提供稳定和强大的磁场,提高电机的效率和输出功率,从而提高电动汽车的动力性能。
增强电动汽车性能:永磁同步电机的转子损耗很小,功率密度高,可采用多极,为采用直接驱动、全封闭结构和系统集成化提供了可能。
高效能:永磁同步电机的能效更高,不需要产生额外的磁场,转子能够快速响应变化的负载条件,实现最大功率输出。
(整理)同步时钟系统设计方案
2.2时钟系统2.2.1系统功能地铁时钟系统为地铁工作人员和乘客提供统一的标准时间,并为其它各有关系统提供统一的标准时间信号,使各系统的定时设备与本系统同步,实现地铁全线统一的时间标准,从而达到保证地铁行车安全、提高运输效率和管理水平、改善服务质量的目的。
地铁1号线一期工程时钟子系统按中心一级母钟和车站二级母钟两级方式设置,系统基本功能如下:1)同步校对中心一级母钟设备接收外部GPS或∕和北斗卫星标准时间信号进行自动校时,保持同步。
同时产生精确的同步时间码,通过传输通道向1号线一期工程的各车站、车辆段的二级母钟传送,统一校准二级母钟。
二级母钟系统接收中心母钟发出的标准时间码信号,与中心母钟随时保持同步,并产生输出时间驱动信号,用于驱动本站所有的子钟,并能向中心设备回馈车站子系统的工作信息。
二级母钟在传输通道中断的情况下,应能独立正常工作。
2)时间显示中心一级母钟和二级母钟均按“时:分:秒”格式显示时间,具备12和24小时两种显示方式的转换功能;数字子钟为“时:分:秒”显示(或可选用带日期显示)。
3)日期显示中心一级母钟应产生全时标信息,格式为:年,月,日,星期,时,分,秒,毫秒,并能在设备上显示。
4)为其它系统提供标准时间信号中心一级母钟设备设有多路标准时间码输出接口,能够在整秒时刻给地铁其它各相关系统及专业提供标准时间信号。
这些系统主要包括:◆传输系统◆无线通信系统◆公务及站内通信系统◆调度电话系统◆广播系统◆导乘信息系统◆电视监视系统◆UPS电源系统◆网络管理系统◆地铁信息管理系统◆综合监控系统◆信号系统◆自动售检票系统◆门禁系统◆屏蔽门系统5)热备份功能一级母钟、二级母钟均有主、备母钟组成,具有热备份功能,主母钟故障出现故障立即自动切换到备母钟,备母钟全面代替主母钟工作。
主母钟恢复正常后,备母钟立即切换回主母钟。
6)系统扩容由于控制中心为1、2、3号线共用,因此1号线一期工程时钟系统应具备系统扩容功能,通过增加适当的接口板,为1号线南北延长线各车站及2、3号线设备提供统一的时钟信号,同时预留接口对接入该中心的其它线路提供统一的时钟信号,最大限度地实现线路间的资源共享,以节省投资和设备的维护成本、提高运营服务质量。
LTE-M系统高稳定主从时间同步设计
LTE-M 系统高稳定主从时间同步设计王翔,魏佳鹏(河北远东通信系统工程有限公司,河北石家庄050200)收稿日期:2020-12-260引言当前,LTE-M 系统发展迅速,技术及产业链有了很大的发展,已经形成了规模产业,成为地铁领域车地无线通信系统建设的首要选择。
而LTE-M 系统要可靠运行和提供稳定的服务,首要条件是采用一个高稳定高精度的时间同步系统为整个系统提供频率和相位同步。
根据3GPP 标准的规定,频率同步精度达到0.05ppm 、相位同步精度达到2.5μs 内,才能保证系统长久地为用户提供高效、稳定和可靠的服务。
目前LTE-M 系统有2种同步方式可供选择,一种是使用GPS 同步方式;另一种是使用IEEE1588v2精确时间同步方式。
IEEE1588v2精确时间同步方式具有成本低廉、架设简便等优点,并且其同步精度已经与GPS 同步方式相差无几[1]。
而高稳定的IEEE1588v2时间同步方式可以同时满足LTE-M 系统对同步精度和同步可靠性的需求。
本文阐述了IEEE1588v2精确时间同步协议的基本原理,根据LTE-M 系统对于时间稳定性的需求提出了双环网双源异主主从时间同步解决方案。
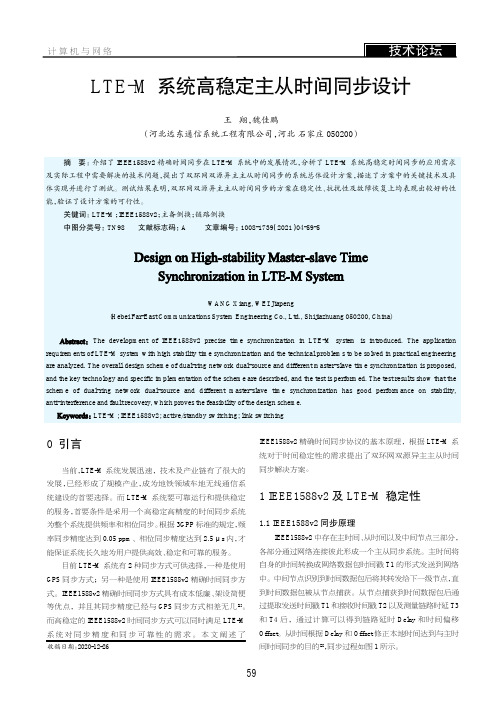
1IEEE1588v2及LTE-M 稳定性1.1IEEE1588v2同步原理IEEE1588v2中存在主时间、从时间以及中间节点三部分,各部分通过网络连接彼此形成一个主从同步系统。
主时间将自身的时间转换成网络数据包时间戳T1的形式发送到网络中。
中间节点识别到时间数据包后将其转发给下一级节点,直到时间数据包被从节点捕获。
从节点捕获到时间数据包后通过提取发送时间戳T1和接收时间戳T2以及测量链路时延T3和T4后,通过计算可以得到链路延时Delay 和时间偏移Offset 。
从时间根据Delay 和Offset 修正本地时间达到与主时间时间同步的目的[2],同步过程如图1所示。
图1IEEE1588v2时间同步过程1.2稳定性影响分析在使用IEEE1588v2同步方式的LTE-M系统中,时间同步的稳定性取决于IEEE1588v2时间同步的稳定性。
液压支架同步升降系统设计

置信 号 , 指令 输 入 信 号 进行 比较 运 算 , 与 发 出 比 例 伺 服 换 向 阀 的 控 制 信 号 。 制 器 由 控
PC机 、 A/D及 D/A转 换 构 成 ; 体 控 制 编 程 具 实现 。
2 同步升 降控制 系统构 成及建模
电液 伺 服 升 降 同步 控 制 系 统 由四 个 同
步 子 系 统 构 成 , 个 动 力机 构 的 组 成 和 主 四 要液 压 、 器元 器 件 基 本 参 数 如 下 。 电 () 1比例 伺服 阀 : 四个 系统均采 用BOS CH 公 司NG 非 线 性 ( 0 比例 伺 服 阀 。 本 参 6 6 %) 基 数如 下 : 定 供 油 压 力 : 1 额 2 MPa; 定 流 量 : 额 2 1 mi 额 定 工 作 电流 : l mA{ 宽 : 4 / n; 士 0 频 5 HZ 响应 时 间(0 %)<l ms O ; 10 : 0 。 ( ) 例溢 流 阀BOSCH公司 NG6 2比 比例 溢 流阀 , 公称压 力为3 .MP ; 1 5 a 响应时 间(0 %) 10 :
工 业 技 术
SI0 C NE&TCNLG E EHO0Y.
匪圜
液 压 支 架 同步 升 降 系学 院 机 电 工 程 学 院 西 安 陕
7 3 1 00) 0
摘 要 : 文分析 了液 压 同步系统 的研 究现 状及 存在 的问题 , 本 并据此设 计 出运 用 电液比 例伺服 阀实现 四缸 同步的液 压控 制系统 , 立 了升 建 降 同 步控 制 系统 的 解 析 模 型 , 分 析 模 型 时 作 了一 些 假 设 , 忽略 了某 些 参 数 的 影 响 , 而从 分 析 简化 的 数 学 模 型 得 出 了优 化 系统 静 , 在 并 进 动 态 特 性 的 条 件 。 对 建 模 结 果 存 在 的 同 步 误 差 , 析 了误 差 产 生 的 原 因 , 出 了减 小 误 差 的 方 法 。 针 分 提 关 键 词 : 步控 制 电液 伺服 机 构 同 PD控 制 I 中图 分 类 号 : H1 7 T 3 文献标识码 : A 文 章编 号 : 6 2 3 9 ( 0 10 ( ) O 1 —0 1 7 - 7 1 2 1 ) 7b- 1 1 2 防 随 着 液 压 技 术 在 工 程 领 域 中 的 广 泛 采 要 求 在 升 降 过 程 中 速 度 平 稳 一 致 , 止 梁 一 用 , 同 液 压 机 构 之 间 的 同 步 问 题 日益 得 体 扭 曲 变 形 。 般 多 点 同 步 升 降 电 液 伺 服 不 阀 阀 到 重 视 。 于 每 一 套 液 压机 构 负 载 存 在 差 系 统 具 有 两 种 形 式 : 控 和 泵 控 方 式 。 控 由 压 异 、 件 性 能 不 同 以及 制 造 误 差 , 耗 等 使 式 由 集 中 泵 站 提 供 动 力 源 , 力 油 通 过 控 元 损 系 得 多 执 行 机 构 在 同 步 运 动 中 会 产 生 误 差 。 制 阀 组 的 分 配 进 入 液 压 缸 , 统 通 过 各 路 电 液 伺 服 系 统 是 一 种 由 电信 号 处 理 装 置 和 阀 件 通 断控 制 流 量 , 而 实 现 同 步 ; 控 式 从 泵 液 压 动 力 机 构 组 成 的 反馈 控 制 系 统 , 过 的 动 力 源 为 分 散 形 式 , 个 缸 体 由独 立 油 通 每 油 通 使 用 电液 伺 服 阀 , 小 功 率 的 电 信 号 转 换 泵 驱 动 , 泵 为 变 频 调 速 电机 驱 动 , 过 调 将 为 大 功 率 的 液 压 动 力 , 而 可 实 现 一 些 重 从 型 大 功 率 机 械 设 备 的 伺 服 控 制 , 有 结 构 具
时钟同步系统方案设计分享

时钟同步系统在福建某通信局投入使用由我公司自主研发生产的一套时钟同步系统在福建某通信局成功投入使用。
本次时钟同步系统,主要是根据福建某通信局发展需要,应对项目实施需求,具有针对性的配置的一套完整的时钟同步系统,分享如下:
1.时钟同步系统的需求原因
应对通信局客户对北斗GPS时钟同步系统的需求逐渐增多,现有槽道已无法满足未来的客户需求,后期运行也大大增加施工安全隐患。
经过市场调研,选由我公司自行配置一套北斗GPS时钟同步系统,要求各网段授时设备独立运行,可供多用户共同使用,同时楼顶线路只允许架设1套GPS北斗卫星天线。
2.时钟同步系统的配置方案
因工程配置的局限性,本次时钟同步系统需求配置6台北斗GPS
时钟同步设备,且只能共用一套卫星天线,因此我们在系统内配置了GPS北斗双模有源分配器将其分开,具体连接方式如下图:
时钟同步系统配置方案
3.时钟同步系统的授时方法(同步科技,小安,189********(微信同
时钟同步系统整体采用NTP授时方式,需要同步时间的授时终端,通过获取时间同步设备的IP地址,来实现局域网内所有网络设备
的时间统一,网络配置图如下所示:
时钟同步系统的网络配置图
4.时钟同步系统配置清单
鉴于以上需求,配置1套完整的时钟同步系统,清单如以下表格:
高精确的时间对于通信局系统的正常运行有着十分重要的意义,
本次时间同步系统主要是基于GPS北斗的时间同步系统,
能够实时地对主站计算机终端时间进行校正, 目前在通信局配置有着很大的需要。
以上为此次给通信局配置的时间同步系统的一个说明,相关用户可作为参考。
异步与同步系统设计

异步与同步系统设计1.概念:异步系统是指任务的执行不按照顺序进行,任务之间相互独立,不需要等待其他任务的结果即可开始执行。
异步系统设计中通常涉及到事件驱动、回调函数等概念。
2.设计原则:-尽量避免阻塞:异步系统设计中,任务的执行不会阻塞其他任务的进行,因此需要尽量避免任务阻塞,提高系统的并发性能。
-使用事件驱动:通过事件驱动的方式触发任务的执行,可以实现任务的异步执行。
-使用回调函数:通过回调函数的方式,任务的执行结果可以在任务完成后通知其他任务或者上层模块。
3.特点:-并发性高:异步系统设计充分利用了任务的并行执行,提高了系统的并发性能。
-响应速度快:由于任务的异步执行,系统的响应速度更快,能够更好地处理用户的请求。
-复杂度高:异步系统设计相对复杂,需要处理任务的依赖关系、任务的执行顺序等问题。
4.适用场景:- 高并发场景:异步系统适用于需要处理大量并发请求的场景,如Web服务器、消息队列等。
-IO密集型应用:异步系统能够更好地处理IO密集型的应用,如文件读写、网络请求等。
-需要快速响应的应用:异步系统能够更快地响应用户的请求,提供更好的用户体验。
1.概念:同步系统是指任务的执行按照顺序进行,一个任务的执行需要等待其他任务的结果。
同步系统设计中通常涉及到线程、锁、信号量等概念。
2.设计原则:-线程同步:同步系统设计中,需要使用线程同步的机制,保证任务之间的执行顺序和协作方式。
-互斥操作:同步系统中,需要使用锁等机制实现对临界资源的互斥访问,保证数据一致性。
-进程间通信:同步系统中,需要使用进程间通信的机制,实现不同任务之间的数据传输和协作。
3.特点:-顺序执行:同步系统的任务按照顺序执行,保证了任务之间的依赖关系和顺序要求。
-容易理解:同步系统相对异步系统而言,设计和调试相对容易,逻辑清晰。
-并发性低:同步系统任务串行执行,不能充分利用系统的并发性能。
4.适用场景:-数据一致性要求高:同步系统适用于对数据一致性要求较高的场景,如数据库操作、事务处理等。
同步互动课堂系统设计方案
同步互动课堂系统设计方案1.系统设计2.1需求分析此次建设的XXXXX同步互动课堂系统,采用一个平台多种应用的原则,依托市城域网为载体,能够实现学校的互动教学平台与12个班级的直播交流。
实现远程互动教学、精品课件直播/录播/存储、精品课件资源共享、跨区域教学合作/学术交流、创新教学模式和听课模式、视频会议、培训教研等多种应用。
目前,XXXXX需要建设一套同步课堂系统。
可满足学校的互动教学,并实现12个课堂的直播,具体需求如下:➢核心设备具有很强的稳定性,能够保证7x24小时不间断运行,并且采用嵌入式架构,保证不受病毒的干扰;(核心资源采用市现有资源)➢系统在音视频传输方面需要采用先进的硬件平台,并以软件视频会议的方式进行交互式传输;➢能够适应现有的教学方式,能够自动的实现音视频图像切换技术;➢实现图像的智能分析,对学生、老师的发言动作做智能的跟踪;➢能够对本地老师、学生、板书、远端学生的实时画面做存储或直播,共享优质资源,学生可以通过后期点播或直播进行收看;➢图像质量做到1920x1080p清晰度,以做到互动教学的高清晰视频目的;➢录制的课堂可以上传到XXXXX的资源平台进行共享,并且具有评分、留言、多平台点播等功能;➢采用统一标准,可以扩展到桌面、移动设备上,以实现名师一对一、非教室老师、学生通过互联网接入到课堂中进行实时互动;2.2XXXXX同步互动课堂设计“同步互动课堂”系统的功能:➢“同上一节课”远程互动教学➢精品课件直播/录播/存储➢精品课件资源共享➢远程高清视频培训/会议➢跨区域教学合作/学术交流➢创新教学模式和听课模式整个系统是以普及共享优质课程资源为目的、体现现代教育思想和教育教学规律、展示教师先进教学理念和方法、服务学习者自主学习、通过网络传播的开放课程以及实现区域性异地多点互动视频教学和远程交互式培训(会议)为建设容,所有的网络课程、所有的作业,所有的教师互动、学生互动都可以在这个平台上进行。
3/2接线条件下大型电厂同步系统的设计与运行
卜 3l 罔 - 3母 l J 0 { 1 t k V
哦
,
对 于线路 的同期操 作 , 从设 计上 来说 , 去一 般 过
. 奄 1 . i " - J
采 用带相位 闭锁 的手动准 同期装 置 ,相位 闭锁 ” “ 即在 合 闸 回路 串接具 有 同定 闭 锁 角6的 同步 闭锁 继 电器 接点 。并 且是无论在 哪 台断路器上 合环 , 闭锁角都 相 同。 这种设计 , 于差频并 网, 对 手动 准同期时 , 在压差 、 频 差 均合 格 时可 以通过 人 工控制 相 角差 实现 同期并 网 于 同频并 网 , 对 情况就不 同 了 : 因同频 并 网相角差
作者简介 : 刘佩芬 ( 9 6 )女 , 15一 , 陕西成阳人 , 大学小科 , 剐教授 , 从事电力 系统 门动化方而的教学和科研] 作。
ห้องสมุดไป่ตู้
系统联 络线 。线 路 合 闸既有 差频 并 网又有 同频 并 网
情 况 , 多 数情 况下 是 同频并 网 且
同频并 网 , 即待 并列 断路 器两 侧频 率相 同 , 只有
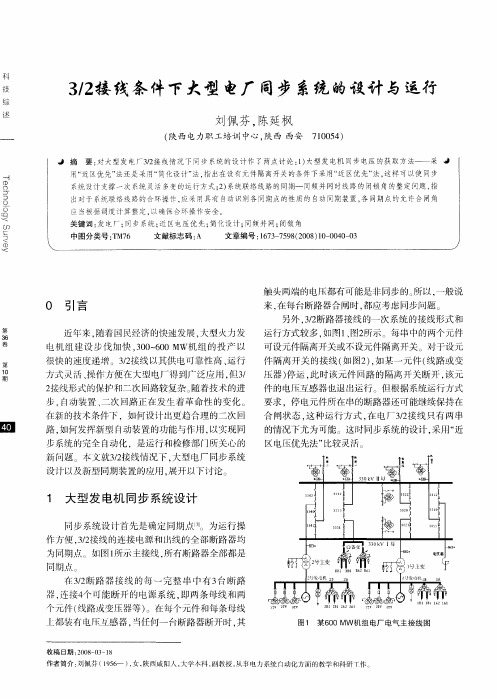
器, 连接4 可能断开的电源系统 . 个 即两条母线和两 个元件 ( 线路 或变压 器等 ) 。在 每个元 件和 每条母 线 上都装有电压互感器, 当任何一台断路器断开时 , 其
图1 某 6 0MW 机 组 电厂 电气 主接 线 图 0
收 稿 日期 :0 8 0 一l 20 — 3 8
触 头两 端 的电压都有 可能 是非 同步 的。 以 , 所 一般 说
0 引言
第
3 6
来, 在每台断路器合闸时, 都应考虑同步问题 。
另外 ,/断路 器接 线 的一 次系统 的接线形 式 和 32 运行方 式较 多 , 图 1图2 如 、 所示 .每 串 中的两个元 件 、 可设 元件 隔离开关 或不设 元件 隔离 开关 。对于设 元 件 隔离 开关 的接 线 ( 图2 , 某一 元 件 ( 如 )如 线路 或 变 压器 ) 运 ,Lt 停 C H该元 件 回路 的隔离 开 关 断开 , 元 , 该 件 的电压互 感器也 退 出运行 。但根据 系统 运行方 式 要求 ,停 电元件所 在 串的断路 器还 可能继 续保持 在 合 闸状 态 , 种 运行 方 式 , 电厂 32 线 只有 两 串 这 在 /接 的情 况下尤 为可 能 。这时 同步系统 的设计 , 采用 “ 近 区电压优先 法 ” 比较灵 活 。
同步系统架构设计

0
架构分层与模块划分
4
架构分层概述
01
表示层
负责与用户进行交互,展示系统功 能和信息。
服务层
03
提供可复用的服务接口,支持应用 层的业务处理。
02
应用层
处理具体的业务逻辑,实现系统核 心功能。
数据访问层
负责与数据库进行交互,实现数据 的增删改查等操作。
04
各层功能及模块划分
表示层
包括用户界面设计和前端交互逻辑,提供友 好的用户体验。
要求的场景。
混合式部署
结合集中式和分布式部署的优点, 根据业务需求和数据特点,灵活 调整部署策略,实现最优的系统
性能和资源利用率。
硬件环境要求
服务器
选择高性能、高可靠性的服务器, 配置足够的 CPU 、内存、存储和 网络资源,以满足同步系统的运
行需求。
存储设备
根据数据量大小和访问频率,选择 合适的存储设备,如高速硬 盘、 SSD 或分布式存储系统等。
意事项等。
接口应保证稳定性和兼容性 , 避免频繁变更导致的不必
要麻 烦。
0
部署方案与环境要求
5
部署方案选择
集中式部署
将同步系统核心组件部署在中心 节点,管理所有数据同步任务, 适用于数据量较小、实时性要求
不高的场景。
分布式部署
将同步系统组件分散部署在多个 节点,通过负载均衡和数据分片 技术,提高系统吞吐量和可扩展 性,适用于大数据量、高实时性
故障检测 系统能够自动检测故障,如硬件故障、
网络故障等,并及时进行处理。
数据恢复 在发生故障时,系统能够自动恢复数
据,确保数据的连续性和可用性。
容错设计 采用容错设计,确保系统在发生故障 时仍能正常运行,如冗余设计、负载 均衡等。
基于FPGA的高精度同步时钟系统设计
( 1 .De p a r t me n t o f En g i n e e r i n g Ph y s i c s ,Ts i n g h u a Un i v e r s i t y,B e i j i n g 1 0 0 0 8 4,Ch i n a ;2 .Ke y La b o r a t o r y o f P a r t i c l e &
间戳 交 换 的过 程 示 意 图如 图 1所 示 。
在很 多 大 型 物 理 实 验 和 工 业 应 用 中 , 时 钟 同步 技 术 都 扮 演 着 举 足 轻 重 的 作 用 。 比如 在 中 国 四川 锦 屏 暗 物 质 探 测实验 中 , 需 要 为 多 个 独 立 探 测 装 置 提 供 相 应 的 时 间 信
—
中 的 同步 系 统 就 是 基 于 纯 硬 件 实 现 的 。
Ra di a t i o n I ma g i ng,M i n i s t r y o f Edu c a t i on,Ts i ng hua Un i ve r s i t y;3. Ts i ng hua Fr e e s c a l e Tr a i ni n g Ce nt e r ) Ab s t r a c t :T h i s pa pe r i nt r od uc e s t he ba s i c t he o r y of Pr e c i s i o n Ti me Pr ot oc o 1 ( PTP) . A l o w- c os t a nd h i g h — p r e c i s i on t i me s y nc h r o ni z a t i o n s ys t e m i s d es i gne d a nd i m pl e me nt e d ba s e d on PT P. Al l t h e mo dul e s i n t h e de s i gn,i nc l udi n g l oc a l t i me m od ul e, t i me pr o t oc ol m od ul e, s e n di ng buf f e r mo dul e,r e c e i vi ng buf f e r mo du l e a n d t i me s t a mp m od ul e, a r e i m pl e me n t e d i n FPG A. T h i s de s i g n c a n a c h i e v e na n os e c o nd s y nc hr o ni z a t i on a c c u r a c y . Be s i de s ,t h i s l ow c o s t s ol ut i on i s e a s y t o e xt e nd,t hus s u i t a bl e f or a p pl i c a t i ons i n l o c a l ne t wor k c l oc k s y n e hr o—
UWB室内无线同步的定位基站系统设计
UW B室内无线同步的定位基站系统设计武志凯,刘宾(中北大学信息与通信工程学院,太原030051)摘要:针对UW B室内定位系统中有线同步方式存在时钟电路设计困难㊁现场布线复杂且硬件成本较高的问题,提出采用基站间无线同步的方式,服务器只需发送一次定位指令,基站间就可进行定时同步,简化了同步机制,降低了系统的硬件成本,减轻了服务器与基站间的网络通信负荷;针对现有的基站大多采用串行主控芯片进行定位数据和其他功能子模块的控制与处理,造成处理效率低下㊁不能满足高密度标签实时定位需求的问题,提出采用F P G A作为基站主控芯片,不同功能同时并行执行,提升了基站的处理速度和工作效率㊂实际测试结果表明,该基站系统操作简便㊁运行稳定㊁定时精准,具有较高的实际价值㊂关键词:室内定位;UW B;F P G A;无线同步中图分类号:T N925文献标识码:AD e s i g n o f I n d o o r W i r e l e s s S y n c h r o n i z a t i o n P o s i t i o n i n g B a s e S t a t i o n S y s t e m B a s e d o n U W BW u Z h i k a i,L i u B i n(S c h o o l o f I n f o r m a t i o n a n d C o mm u n i c a t i o n s E n g i n e e r i n g,N o r t h U n i v e r s i t y o f C h i n a,T a i y u a n030051,C h i n a)A b s t r a c t:I n t h e c a b l e s y n c h r o n o u s l y i n UWB i n d o o r p o s i t i o n i n g s y s t e m i s d i f f i c u l t,c o m p l i c a t e d f i e l d w i r i n g a n d h a r d w a r e c l o c k c i r c u i t d e s i g n t o t h e p r o b l e m o f h i g h c o s t,t h e m e t h o d o f w i r e l e s s s y n c h r o n i z a t i o n b e t w e e n b a s e s t a t i o n s i s p r e s e n t e d i n t h i s p a p e r,t h e s e r v e r s i m p l y s e n d s a p o s i t i o n i n g i n s t r u c t i o n,b e t w e e n t h e b a s e s t a t i o n c a n b e f o r t i m e s y n c h r o n i z a t i o n,s i m p l i f y t h e s y n c h r o n i z a t i o n m e c h a n i s m, r e d u c e t h e h a r d w a r e c o s t o f t h e s y s t e m,a n d r e d u c e t h e n e t w o r k c o mm u n i c a t i o n b e t w e e n t h e s e r v e r a n d t h e b a s e s t a t i o n l o a d.I n v i e w o f t h e e x i s t i n g b a s e s t a t i o n m o s t l y a d o p t s s e r i a l m a s t e r c o n t r o l c h i p p o s i t i o n i n g d a t a a n d o t h e r f u n c t i o n s o f c o n t r o l a n d p r o c e s s i n g m o d u l e, p r o c e s s i n g e f f i c i e n c y i s l o w,c a n't m e e t t h e d e m a n d o f h i g h d e n s i t y l a b e l r e a l-t i m e p o s i t i o n i n g p r o b l e m,p u t f o r w a r d u s i n g F P G A a s t h e b a s e s t a t i o n m a s t e r c o n t r o l c h i p,d i f f e r e n t f u n c t i o n e x e c u t e d i n p a r a l l e l a t t h e s a m e t i m e,i m p r o v e t h e p r o c e s s i n g s p e e d a n d e f f i c i e n c y o f t h e b a s e s t a t i o n.T h e p r a c t i c a l t e s t s h o w s t h a t t h e b a s e s t a t i o n s y s t e m i s e a s y t o o p e r a t e,s t a b l e i n o p e r a t i o n a n d a c c u r a t e i n t i m i n g,w h i c h h a s g r e a t p r a c t i c a l v a l u e.K e y w o r d s:i n d o o r p o s i t i o n i n g;UW B;F P G A;w i r e l e s s s y n c h r o n i z a t i o n引言近年来,随着博物馆㊁变电站㊁养老院和大型商场等人员或设备密集型场所对获取室内人员或一些重要设备和物品实时位置信息的迫切需求,对高精度㊁高密度㊁环境复杂的室内定位系统的研发显得尤为重要[1-4]㊂UW B技术以其抗干扰能力强㊁时间戳分辨率高以及带宽资源丰富等特性,在室内环境复杂㊁标签数量多的环境下得到了越来越广泛的应用[5-6]㊂现有的室内定位系统通常采用M C S51或S T M32为主控芯片,通过有线同步的方式进行时钟同步㊂一方面,定位系统需要设计专门的时钟同步电路,增大了系统的硬件成本;另一方面,在标签数量大㊁定位数据上传速率快的情况下,会造成基站处理速度与标签上传速度无法匹配的问题[7-8]㊂本文针对上述问题,采用F P G A为主控芯片,通过并行架构对各模块进行并行处理,大大降低了接收标签定位信息所需用的时间,提高了单位时间内的接收标签数量;采用无线同步的方式对同一区域内的基站进行时钟同步,降低了系统网络信道的通信负荷,减少了系统的硬件成本,使整个定位系统更加方便灵活,易于推广㊂1系统总体设计该系统主要由主控模块㊁UW B定位模块㊁无线数传模块㊁网络接口模块和相机模块构成㊂采用无线同步的方式实现了基站间的时钟同步㊂基站在定位窗口期内接收到标签发送的定位信息后,上传到服务器,通过T D O A算法对其进行定位;无线数传模块采用443M无线信道与标签进行通信,实现电子围栏示警和一键S O S求救的功能;相机模块通过前端摄像头采集该区域内的实时图像,实现了指定区域内人员行为实时显示的功能㊂系统设计框图如图1所示㊂图1基站系统设计框图图2 基站定位功能流程图2 无线同步理论分析基于UW B 时间戳信息的定位方式有两种,分别是双向测距(TWR ,T w o W a y R a n g i n g )和时间差定位技术(T D O A ,T i m e D i f f e r e n c e o f A r r i v a l)[9-10]㊂通常基于TWR 的T O A 定位方法通信量大,使其存在支持移动标签节点数量较少㊁定位时间间隔和移动标签功耗较大的问题,很难满足室内人员密度高㊁立体流动性强和房间密集等应用需求[11]㊂针对上述问题,本系统采用上行T D O A 定位方式,标签按照设定频率上传定位信息㊂基站同步完成后进入监听标签上传的定位信息状态,接收到标签发送的定位信息后,将时间戳信息上传给服务器,采用T D O A 算法对其进行定位㊂该定位方式在节约UW B 信道宽带资源的同时,提高了待定位标签的密度和定位实时性,适合应用在高密度的室内定位场合㊂T D O A 定位系统中基站之间的超宽带时间需要进行高精度同步,可分有线和无线两种方式,有线方式一般采用C A T 5电缆传输全局时钟和同步信号到各个锚节点超宽带收发器,使得每个节点的超宽带时间计时频率保持严格一致,无线方式一般通过参考基站向普通基站广播发送超宽带无线信号,普通基站接收到同步帧后保存对应的同步时间戳信息,通过不同基站间的距离信息,进而实现时间同步,这两种同步方式的优劣势如表1所列㊂由表1可知,两种同步方式各有其优劣势㊂考虑到在实际应用中布线困难与高精度时钟同步电路设计困难的问题,本系统采用无线同步方式对基站进行时钟同步㊂当某一区域内进行定位功能时,服务器向该区域内的所有基站发送定位指令㊂接收到定位指令后,该区域内的普通基站转为接收同步帧状态,此时参考基站定时向其他基站发送同步帧信息㊂区域内普通基站通过片上处理算法滤除此时间片内可能出现的其他标签定位帧信息,在接收到同步帧信号并记录同步帧到达时间戳信息后,转为监听标签上传的定位帧信息状态,接收到标签发送的定位帧信息后,基站将此次同步帧的时间戳信息和标签定位帧信息进行上传,完成单次定位监听过程㊂具体流程图如图2所示㊂3 基站子模块设计3.1 主控模块本系统中基站主要负责与服务器㊁表1 有线同步和无线同步方式差异方 式优 势劣 势有线同步方式时间同步精度高,基站之间的时间偏差稳定硬件电路现场布线复杂无线同步方式系统硬件成本较低时间偏差不稳定,且需频繁同步标签和参考基站之间的信息交互和基本信号处理工作㊂为了保证系统能够正常运行,基站的中央处理单元必须具有较高的主频和较强的运算能力,从而保证以太网协议栈的快速运行,提高基站E t h e r n e t 网数据包的吞吐能力;实现超宽带收发事件快速处理的实时响应,为分布式处理UW B 定位特征信息提供基础㊂F P G A 支持复杂时序逻辑控制,可以实现定位系统中基站的所有工作,并且F P G A 为并行处理系统,可以方便后续功能的并行扩展㊂因此,本系统采用赛灵思公司的S pa n t a n 6系列F P G A ,型号为X C 6S L X 45,内含丰富的逻辑资源,可用R AM 存储资源为2088K B ,满足大量数据的存储需求;可用I /O 接口为218个,满足多个模块接口的要求;输入时钟为19~250MH z ,最大主频可通过P L L 倍频至0.94G H z,满足高速处理数据的需求㊂3.2 U W B 定位模块本系统中UW B 模块采用D e c a W a v e 公司生产的DWM 1000芯片模组进行超宽带无线通信㊂该模块集成了内置天线及相应的射频电路和时钟电路㊂其中,时钟电路由输出精度为1p pm 的38.4M 有源温度补偿晶振,为DWM 1000内部提供高精度的稳定时钟源㊂由于晶振对电源噪声比较敏感,因此,本系统采用L D O (线性稳压电源)为其提供供电电压,为整个模块工作稳定提供良好的电源电压㊂主控芯片可作为主机,通过S P I 协议与其进行数据交互,DWM 1000通过更新中断寄存器中的中断标志位来通知主控芯片各类事件的发生㊂主控芯片与DWM 1000数据交互时序图如图3所示㊂图3 D WM 1000数据交互时序图DWM 1000模块中数据传输速率分为110k b ps ㊁850k b p s 和6.8M b ps ,其数据打包时间和支持标签数量如表2所列㊂表2 不同传输速率的打包时间和标签容量速 率打包时间支持标签数量110k b p s 3.042m s 59.2850k b ps 380.3μs 473.46.8M b p s 103.3μs 1742.0由上表可知,在实时定位系统中,若采用6.8M b ps 传输数据速率,则系统容量能够满足每秒钟发送1742个标签,且能够保证97%的成功发送概率㊂针对在室内定位中标签数量较多㊁定位刷新频率较快的问题,本系统采用6.8M b ps 的数据传输速率㊂3.3 其他功能模块针对在实际应用中出现的某些区域禁止人员活动以及人员遇险后发送求救措施的需求,本系统采用S X 1212低功耗无线数传芯片实现电子围栏示警与一键S O S 求救功能㊂该芯片通过虚拟S P I 协议和主控进行通信,支持0.78~150k b ps 的数据传输速率,且频率范围为300~510MH z ,而UW B 的频率范围为3.1~10.6G H z,彼此频率范围相差较大,相互之间互不影响㊂此外,本系统还包括图像采集功能㊁在线参数修改功能等,当需要观察某一区域内的人员情况时,服务器可向该区域内的基站发送图像采集指令,基站接收到指令后,从定位状态切换到采集图像状态,将该区域内的图像信息实时上传给服务器,实现了某一区域内实际情况的实时显示;服务器可通过网络接口实时修改基站的参数,用来调整网络参数和UW B 天线发射功率和接收灵敏度等,简易便捷㊂4 测试与分析在完成整个基站系统设计后,对其进行测试㊂将基站定位窗口期设置为1m s ,定时同步周期设置为2m s㊂通过服务器向基站发送定位指令后,该区域内的所有基站进入定位状态,图4为参考基站发送同步信息的间隔波形,高电平代表发送同步信息所需时间,图5为普通基站的定时定位时间波形,高电平表示2m s 的同步间隔内定位所占时间㊂由图4和图5可知,进入定位状态后,参考节点以2m s 的间隔定时发送同步信息,普通节点在接收到同步信息后转为接收定位信息状态,定位窗口期为1m s,整个系统无线同步方式简单便捷,工作稳定㊂放置标签在该区域内,标签以0.3s 的间隔发送定位信息,图6为通过网络助手接收到的各个基站上传的定位信息,图7为服务器软件平台标签位置信息显示图㊂由图6和图7可知,该系统可以实时有效上传标签的图4参考基站发送同步信息的间隔波形图5普通基站的定时定位时间波形图6 基站上传定位信息图位置信息,服务器通过T D O A 算法对基站上传的定位信息进行解算后,可以精准地确定该标签的实时位置信息㊂5 结 语本文采用F P G A 为主控芯片设计了室内定位多功能基站系统㊂通过无线同步方式对其进行时钟同步,降低了系统的硬件成本,简化了定位流程,减轻了网络线路的通信负荷㊂同时具备电子围栏示警㊁一键S O S 求救㊁图像实时显示和在线修改参数的功能㊂实际测试表明,该系统自图7 服务器软件平台标签位置信息显示图动定时同步时间间隔准确㊁接收标签数量大,处理信息快,具有较高的实际价值㊂参考文献[1]张忠娟.基于UW B 的室内定位技术研究[D ].天津:天津大学,2012.[2]樊祥宁.超宽带无线通信关键技术研究[D ].南京:东南大学,2015.[3]嵇茂祥.UW B 室内定位系统研究与实现[D ].上海:华东师范大学,2017.[4]张泽.基于超宽带的室内高密度移动定位系统[D ].广州:华南理工大学,2018.[5]朱颖.基于UW B 的室内定位系统设计与实现[D ].南京:南京邮电大学,2019.[6]闫大禹,宋伟,王旭丹,等.国内室内定位技术发展现状综述[J ].导航定位学报,2019,7(4):5-12.[7]顾衍明.基于UW B 的室内机器人定位系统研究与设计[D ].哈尔滨:哈尔滨工业大学,2018.[8]金利剑.基于UW B 的定位系统设计与研究[D ].杭州:浙江理工大学,2019.[9]陶偲.基于UW B 的室内S D S -TWR 测距算法优化和定位算法融合的研究[D ].武汉:华中师范大学,2016.[10]李晨辉,甄杰,祝会忠,等.复杂环境下的超宽带高精度定位算法[J ].测绘科学,2020,45(1):4-10.[11]严威.基于UW B 的井下目标精确定位平台的硬件设计与实现[D ].北京:中国矿业大学,2020.武志凯(硕士研究生),主要研究方向为电子系统设计㊁光信息探测与数字图像处理㊂(责任编辑:薛士然 收稿日期:2020-10-15)。
整理同步时钟系统设计方案

整理同步时钟系统设计方案同步时钟系统是一种可与多个设备进行时间同步的系统,它能够确保所有设备的时钟保持一致,以便进行协同操作或数据通信。
在这篇文章中,我们将讨论同步时钟系统的设计方案。
具体而言,我们将重点考虑以下几个方面:时钟同步方法、网络结构、时钟算法、时钟精度和稳定性等。
一、时钟同步方法常用的时钟同步方法包括硬件同步和软件同步两种。
硬件同步通过物理连接(如专用时钟信号线)将设备的时钟进行同步。
这种方法具有高精度和稳定性,但需要额外的硬件支持。
软件同步则通过网络通信协议实现,可以在现有网络基础设施上进行部署。
虽然软件同步的精度和稳定性相对较低,但它具有灵活性和成本效益。
二、网络结构在设计同步时钟系统时,需要考虑网络结构的拓扑和规模。
常见的网络结构包括星型、总线型、环形等。
星型结构适用于规模较小的系统,总线型结构适用于系统规模较大且设备之间的距离比较近的情况,而环形结构则适用于设备之间的距离较远且需要高可靠性的场景。
三、时钟算法时钟算法是同步时钟系统的核心部分,用于计算设备之间的时间差并进行调整。
常见的时钟算法包括协议层时钟同步(PTP)、网络时间协议(NTP)等。
PTP通常用于高精度和实时性要求较高的场景,如网络传输、电力系统等;而NTP则适用于对时间精度要求相对较低的场景,如电脑时钟同步。
四、时钟精度和稳定性时钟精度和稳定性是同步时钟系统设计中需要考虑的重要参数。
精度指的是时钟与参考时钟之间的误差,稳定性指的是时钟的漂移率。
在设计同步时钟系统时,需要根据具体应用场景的要求来选择合适的时钟源和时钟算法,以达到所需的精度和稳定性。
为了提高系统的精度和稳定性1.选择高精度的时钟源,如GPS、原子钟等。
2.使用高性能的时钟算法,如PTPv23.优化网络结构,减少网络延迟和抖动。
4.定期校准时钟,减少时钟的漂移。
综上所述,同步时钟系统的设计方案包括时钟同步方法、网络结构、时钟算法、时钟精度和稳定性等多个方面。
铁路局时间同步系统的设计
DoI : 1 0 . 3 9 6 9  ̄ . i s s n . 1 6 7 3 — 4 4 4 0 . 2 0 1 7 . 0 3 . 0 0 9
铁 路 时 间 同步 网为 铁 路运 输 各 业务 系统 提 供 统
一
和 准确 的 时 间 ,辅 助 各 运 输生 产 部 门协 调 一 致 工
1 系统构成
铁 路地 面 时 间 同步 网按 三 级架 构 组 成 ,一 级 时 间 同步节 点 设 置在 铁 路 总 公 司调 度 中心 ,二 级 时 间 同步节 点 设 置 在各 铁 路 局调 度 所 或客 专 调度 所 ,三 级 时间 同步节 点设 置在 站 、段 、所 。
作 。目前,各铁路局 时间同步网建设随着各条铁路
2 O 1 0( 4 ): 4 5 - 4 5 .
[ 5 】 何 国彪 . O T N互 联 互 通 及 组 网技 术研 究 [ D ] . 北京 : 北 京 交
通 大 学 ,2 0 1 4 .
以某铁路局新建时间同步系统为例 ,铁路局时
间 同步 系统 采用 主从 同步方 式 组 网 ,分为 两级 结构 ,
随着 铁路运 行速 度的不 断提高和铁 路 线路跨 区域
发 展 ,铁 路 各 系 统 时 间 同 步 越 来 越 重 要 ,铁 路 局
二级同步时间节点设置在铁路局调度楼 ,三级 同步
线 工 程 的 建 设 ,存 在 没 有 规 划 成 系 统 性 建 设 、 没 有 实 现 全 局 性 覆 盖 和 建 设 标 准 不 统 一 的 缺 陷 ;部 分 时 间 同 步 基 准 源 只 取 自美 国 的 全 球 定 位 系 统 ( GPS) ,不 能 接 收 我 国 自主 知 识 产 权 的 北 斗 导 航 卫 星 同步 基 准信 号 ,存 在 国 家 战 略 上 的 安 全 隐患 。
基于Web Service的数据库同步系统的设计与实现

基于Web Service的数据库同步系统的设计与实现摘要结合当前流行的Web Service和技术构造了一个不受平台限制的异构数据库同步系统。
实现了处于Internet上的Sql Server2000向Oracle 的单向同步功能,能够基于IP的安全身份验证功能,多个IP实现了净量数据的传输。
对同步的配置信息采用XML存储,采用Windows应用程序界面化配置,操作方便、易懂。
因为同步环境是对处于Internet上的异构数据库的实时同步;在设计与开发中,重点关注异构数据库的同步以及数据传输的可靠性;探讨能实现可靠数据的同步,以及传输的高效性。
介绍了实现系统的思路以及所需的关键技术。
系统用到的相关技术有捕获技术Windows 托盘服务、多线程处理、以及网络消息机制、多IP同步、同步IP权限验证、同步表名及字段以及字段类型的可配置、异构数据类型的转换、Web Service等。
关键词:Web Service;异构数据库;同步;;The Design and Implementation of DatabaseSynchronization System Based on Web ServiceAbstractWe can construct the Heterogeneous database synchronous system using Web Service. It has realized the function of one-way synchronous from SQL Server2000 to Oracle. It has some functions, the security authentication of IP, the data transmission of IP, the Synchronization configuration using XML storage and the windows application program UI which can make this system be operated easily.Because the synchronous environment will be real-time synchronous for heterogeneous database on the Internet, in the design and implementation, this system has showed the synchronization of heterogeneous database and data transmission reliability, achieving the synchronization of reliable data, the security methods of data transmission, and the efficiency transmission. It will display the ideas of realization and the necessary critical technologies. There are some relevant technologies that this system used, for example, the capture technology, the windows tray service, multi-thread processing, and the network news mechanism, and so on.Key words: Web Service; Heterogeneous Database; Synchronization; ;目录论文总页数:24页1引言 (1)1.1课题背景 (1)1.2国内外研究现状 (1)1.3本课题研究的意义 (2)1.4本课题的研究方法 (2)2WEB SERVICE数据库同步原理 (3)2.1W EB S ERVICE构成与特点 (3)2.1.1Web Servcie的结构 (3)2.1.2Web Servcie的关键技术---协议 (3)2.1.3Web Servcie的特点 (4)2.1.4Web Servcie安全 (5)2.2数据库复制的分类 (5)2.3复制数据的类型 (6)2.4数据捕获技术 (7)2.5冲突检测 (8)3需求分析 (9)3.1同步环境 (9)3.2功能需求 (9)3.3性能需求 (10)3.4输入输出要求 (10)3.5运行需求 (10)4方案设计 (11)4.1数据库同步复制模型 (11)4.2数据库设计 (11)4.2.1源结点Sql Server 2000表设计 (11)4.2.2目的结点Oracle表设计 (12)4.3模块设计 (13)4.3.1数据捕获部分 (13)4.3.2同步部分 (13)4.3.3冲突检测处理部分 (16)5代码实现 (16)5.1开发环境 (16)5.2关键代码详解。
一种画面同步系统的设计与实现

一种画面同步系统的设计与实现姜利英;梁茂;岳保磊;孔令春【摘要】为了更好满足现在会议等场合的需求,通过采用和修改MJPG-streamer 开源视频服务器软件的源码,为其添加新的功能模块,实现板端与PC端屏幕同步显示的效果.使得原本多用于视频监控的MJPG-streamer,有新的应用领域.介绍MJPG-streamer的主要插件及其功能并详细给出利用MJPG-streamer画面同步的实现的方法.实验结果表明,该设计可以很好实现屏幕间的同步.【期刊名称】《现代计算机(专业版)》【年(卷),期】2015(000)005【总页数】4页(P65-67,72)【关键词】嵌入式Linux;MJPG-streamer;同步【作者】姜利英;梁茂;岳保磊;孔令春【作者单位】郑州轻工业学院电气信息工程学院,郑州450002;郑州轻工业学院电气信息工程学院,郑州450002;郑州轻工业学院电气信息工程学院,郑州450002;北京凌阳爱普科技有限公司,北京100085【正文语种】中文随着计算机网络技术、移动通信技术、多媒体技术的快速发展[1],人们对产品的体验的要求越来越高。
当前公司在进行产品展示时,多进行远距离展示,这样就会增加了公司的成本,并占用了办公室内的空间,且搬移不便。
基于此,本文采用了一个开源工程软件,经过修改,设计实现了一种画面同步系统,减小了对投影设备的依赖,同时减少了占地空间,该系统在会展中心、学校、银行、公司等有着广泛的市场和发展前景。
该系统是以Cortex-A8处理器S5PV210为核心,在嵌入式Linux系统平台下,通过MJPG-streamer的输入插件获取屏幕的数据,然后对所得到的视频数据通过内部总线送到视频服务器MJPG-streamer上,视频服务器经过对图像压缩处理,经过以太网传输出去,远端客户机通过浏览器或者专用软件访问视频服务器[2],即可在客户端同步显示板端实时画面,系统总体如图1所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 惰性延迟产生的主要原因是输出 电路的电容和驱动门的内阻抗。 惰性延迟和传送延迟一样,也受 环境变化的影响,但是它正比于 结点的相对扇出。
• 总延迟和惰性延迟、传送延迟及 相对扇出的关系。相应的公式为: • 总延迟=传送延迟十 ( 单位负载 的惰性延迟x相对扇出)
边缘缓慢
• 边缘缓慢是指脉冲信号高低电平变化时 的转换时间加长。 • 在基本反相器中,当输入电压在高和低 之间变化时,将有一大电流出现。所以 若边缘缓慢将使大暂态电流出现时间拖 长。
• 超过一定的绝对负载量之后,通 过线形缓冲增加驱动能力的优点 不再存在。这是由于在ASIC中的 线条宽度有时有限,电流大时在 线上会产生大的电压降。在这种 情况下,用树形缓冲较好;
树形缓冲
• 使用树形缓冲时,时钟电路分成若 干分支,每一分支的驱动强度按几 何级数增长。在实际设计中,通常 使每一分支驱动某一局部电路中的 各部件。在这个局部电路内有一缓 冲器,缓冲器常由一反相器和由其 驱动的功率缓冲器组成。这样做的 另一个好处是,可以保持信号的符 号不变,以及在分文点处呈现一单 位负载。
同步的定义
• 对于静态同步设计,一系统是同步的, 假若: • 1. 每个边缘敏感部件的时钟输入是一次 时钟输入的某个函数;并且仍是像一次 时钟那样的时钟情号。 • 2. 所有存储元件(包括计数器)都是边缘 敏感的,在系统中没有电平敏感存储元 件。
• 这个定义和结构化VLSI设计中的 同步序列机的定义是一致的,一 同步序列机定义为是由一组合网 络组成的,且具有从输出端经过 边缘在状态变化。
• 值得指出的是,这种时钟分配方 案的各个分支在各级之间应该具 有相同的相对扇出,因为不平衡 的分支是时钟歪斜的最大来源。 • 由于布线电容通常是一结点上总 负载的重要组成部分,在设计好 版图后应当再次校核相对扇出。
• 同步电路易于设计和修改,并且 和工艺关系不大,但是它通常不 如异步电路效率高,即占用芯片 面积较大。异步设计通常需要有 更高的设计技巧和经验。
带使能端的D型触发器(E型触发器)
E 型触发器用于有条件地锁存数据: • 1. 允许元件具有一控制线(允许 线 ) ,它把此元件转换至有效状 态或无效状态。 • 自由运行电路元件没有允许线。 它在每一时钟上升边都可改变状 态。
基本的同步部件
•
构成同步基本部件基础的是边 缘敏感D型触发器(图6-1)。其基 本性质为,在时钟(ck)输入的上 升边之后, d 输入端的逻辑值出 现在q输出端,而其补值出现在q 非输出端。这一过程就是取样过 程。
边缘敏感D型触发器
• D型触发器受到一些定时限制,即建立 时间、保持时间和最小时钟宽度。
• 当信号是一个加到边缘敏感部件 的时钟时,上升时间长的后果更 为严重。 • 在同步系统中,边缘缓慢加上门 限电压有差别以及本地引入的噪 声,将使时钟线上产生不同的延 迟,结果将出现我们不希望有的 所谓“时钟歪斜”现象。
• 时钟歪斜是指有效时钟边缘 不在同一时刻出现,当用上 升缓慢的边缘触发不同的边 缘敏感部件时就可能发生这 种情况。 •
线形缓冲
负载等价于64
• 上例表面上看来,似乎不用缓冲器要比 用缓冲器的方案更快,因为后者层次更 多。然而,应用传送延迟和惰性延迟的 计算公式 ( 按每单位负载标称 1ns 传送延 迟和 1ns 惰性延迟计算 ) ,可以得出下列 结果: • 1. 不用缓冲器的电路: • 总延迟=1十64×1=65ns • 2. 用线形缓冲电路: • 总延迟= (1 十 4×1) 十 (1 十 4×1)十(1十4×1)=15ns
• “扇出”一词原指从一个输出端 引出的这种连接的数目,但是现 在它应该计算加到每一连接线上 的等效单位负载数目。由被驱动 部件和外部输出加成的负载总和 是驱动部件输出端的“绝对扇 出”。
• 另外一个很有用的概念是相对扇 出—绝对扇出和驱动能力之比 • 电路中任一结点处的相对扇出为:
绝对扇出 相对扇出 驱动能力
• CMOS的扇出没有固定的限制。然 而,结点的相对扇出决定着电路 的若干特性,特别是决定其电路 延迟。ASIC性能要求给予相对扇 出一个上限,它和生产工艺过程 有关,通常在8至16之间。
电路延迟
CMOS电路中的延迟基本上是两部分延迟之和:
电路延迟 传送延迟 惰性延迟
电路延迟
• 传送延迟是由于栅极下面的耗尽 层充电和放电需要时间产生的。 它取决于栅的类型,供电电压, 温度和工艺过程参数。通常,温 度愈高则载流子的迁移率愈低、 电阻愈高,故延迟愈长。供电电 压低和驱动输入的上升时间长也 使传送延迟增加。
时钟歪斜
时钟缓冲
• 同步系统中时钟(及其他全局控制 线,如复位线)必然负载很重。这 样有可能导致电路延迟和时钟歪斜 不能容忍。克服这个问题的方法是 时钟信号缓冲,具体实现方法有二: 线形缓冲和树形缓冲。
• 线形缓冲 ( 图 5-8) 在信号线上使 用一串缓冲器,使驱动强度逐步 增大。每一缓冲器的驱动强度 (它通常和负载一样)分配,应使 每一结点的相对扇出相同。
• 时钟歪斜是同步系统中最严重的 问题之—。若歪斜的程度大于从 边缘敏感存储器的输出到下一级 输入的延迟时间,则其影响将变 得很明显。它能使移存器中的数 据丢失,使同步计数器发生错误。 时钟歪斜可以由适当的时钟缓冲 使之减小,或者在边缘敏感器件 的输出和其馈给的任何边缘敏感 输入端之间加入一定的延迟。
驱动能力、绝对扇出和相对扇 出
• 从电性能看,每一输出信号受一 定强度的驱动,即具有一定的驱 动能力,它决定于此部件的晶体 管结构。
• 每一输入端在驱动它的部件(或 外部输入端)上加了一定的负载。 像驱动能力一样,负载也取决于 部件的晶体管结构。 • 负载是阻抗性的,电抗分量影响 最大。
• 单位负载和单位驱动能力是由一 个单位晶体管构成的反相器产生 的。反相器的输出定义为具有单 位驱动能力,而其输入则定义为 在驱动它的任何电路上加有一单 位负载。