全数字摄影测量系统VirtuoZoNT模板
全数字摄影测量系统(VirtuoZo)数字化成图过程论文

全数字摄影测量系统(VirtuoZo)数字化成图过程摘要:随着社会的进步,计算机技术和数字图像处理技术的发展,使人类社会已经进入了数字化信息时代。
摄影测量已由原先的模拟摄影测量和解析摄影测量,发展到今天的数字摄影测量。
全数字摄影测量系统(virtuozo)不仅在国内已成为各测绘部门从模拟摄影测量走向数字摄影测量更新换代的主要装备,而且也被世界诸多国家和地区所采用。
关键词: virtuozo、空中三角测量、数字地面高程模型dem中图分类号:g623.58 文献标识码:a 文章编号:随着信息技术和计算机技术的迅猛发展,数字摄影测量已取代传统的模拟摄影测量和解析摄影测量,使摄影测量进入数字化时代。
全数字摄影测量系统(virtuozo)全是利用数字影像或数字化影像完成摄影测量作业。
由计算机视觉(其核心是影像匹配与影像识别)代替人眼的立体量测与识别,不再需要传统的光机仪器。
从原始资料、中间成果到最后产品都是数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息。
国家测绘局对各省级测绘局向数字化规模生产的转轨实施资金、技术上的大力扶持政策,有力地推动数字摄影测量系统在各地方局的推广应用,数字摄影测量系统的应用使得传统摄影测量生产发生了深刻的变革。
一、数字摄影测量系统的组成数字摄影测量系统主要由两部分组成:一部分是影象获取装置与成果输出设备;另一部分(也是其核心部分)是一台计算机、数字摄影测量软件及其它外围设备。
virtuozo全数字摄影测量系统由以下几个部分组成:高精度影象扫描仪。
sgi o2工作站(virtuozo unix工作站版本)512mb内存,mips r5000,rev2.1的cpu,主机速度200mhz,2l”彩色立体显示器,高档微(virtuozo nt版本)512mb内存,cpu为pⅱ-mmx300,21”彩色立体显示器,24bit真彩色(分辨率为1280×1024),20gb硬盘。
VirtuoZo教学手册
全数字摄影测量系统(VirtuoZo)教学手册目录前言 (3)一、数据准备 (4)二、建立测区与模型的参数设置 (6)三、航片的内定向、相对定向与绝对定向 (9)1.内定向作业流程: (10)2.相对定向作业流程: (13)3.绝对定向作业流程: (15)四、同名核线影像的采集与匹配 (17)1.生成核线影像 (18)2.影像匹配 (18)五、DEM、DOM与等高线等数字产品的生成 (21)前言全数字摄影测量系统(VirtuoZo)是武汉适普软件有限公司与武汉大学遥感学院共同研制的全数字摄影测量系统,属世界同类产品的五大名牌之一。
全数字摄影测量系统是利用数字影像或数字化影像完成摄影测量作业。
由计算机视觉(其核心是影像匹配与影像识别)代替人眼的立体量测与识别,不再需要传统的光机仪器。
从原始资料、中间成果到最后产品都是数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息。
全数字摄影测量系统(VirtuoZo)不仅在国内已成为各测绘部门从模拟摄影测量走向数字摄影测量更新换代的主要装备,而且也被世界诸多国家和地区所采用。
在对全数字摄影测量系统(VirtuoZo)的使用中,武汉适普软件有限公司摸索和总结出一套简单易学的基本作业流程,使初学者能够更快更好的掌握该系统。
该作业流程包括:数据准备、参数设置、定向、核线采集与匹配、DEM与DOM以及等高线生成、数字化测图、拼接与出图七个步骤。
一、数据准备数字摄影测量所需资料:相机参数:应该提供相机主点理论坐标X 0、Y 0,相机焦距f 0,框标距或框标点标 控制资料:外业控制点成果及相对应的控制点位图航片扫描数据:符合VirtuoZo 图像格式及成图要求扫描分辨率的扫描影像数据。
VirtuoZo 可接受多种图像格式:如TIFF 、BMP 、JPG 等。
利用VirtuoZo全数字摄影测量系统自动生成等高线

利用 Virt u oZ o 全数字摄影测量系统自动生成等高线陈平萍 王艳华(铁道专业设计院 ,北京 100020)摘 要 介绍了利用 VirtuoZ o 全数字摄影测量系统自动生成等高线的方法和技巧 。
关键词 VirtuoZ o 等高线 方法和技巧The Automatic G eneration of Contour by Usi ng the Digital Photogra m metric System Virtuo Z o NTChen Pingping Wang Y anhuaFull( T he Pr ofessional lnstitu te o f Railw ay )Abstract This paper introduces the m ethod and technique of using the Full Digital Photogram m etric Sys 2tem VirtuoZ o NT to generate contour autom atically.K ey w ords VirtuoZ o NT ; C ontour ; Ex perience and technique在传统的测图模式下 ,等高线的生成是依靠在模 拟测图仪上绘出计曲线 ,然后通过手工或软件内插出 首曲线来完成的 。
随着计算机技术的普及和发展 ,数 字摄影测量作为摄影测量学最新的发展阶段 ,已逐步 趋于完善并已应用到了生产中 。
适普公司开发的 Vir 2 tuoZ o 全数字摄影测量系统在等高线的生成上已高度 自动化 ,且效率比传统的测图方式提高了数倍 ,可同时 生成等高线矢量和栅格数据 ,为后续产品如数字线划 地图 、等高线正射影像叠合图等制作提供了高效可靠 的保证 。
我处于今年 5 月进行了京原线 1 :10 000 地形 图的采集工作 ,在工期要求非常紧的情况下 ,采用了自 动生成等高线然后在此基础上进行测图的方式 ,取得 了较好的效果 ,出色的完成了任务 。
VirtuoZo七步教学手册(已经修改)
全数字摄影测量系统(VirtuoZo)七步教学手册目录前言 (3)一、数字摄影测量数据准备 (4)二、建立测区与模型的参数设置 (6)三、航片的内定向、相对定向与绝对定向 (9)1.内定向作业流程: (10)2.相对定向作业流程: (13)3.绝对定向作业流程: (15)四、同名核线影像的采集与匹配 (17)1.生成核线影像 (18)2.影像匹配 (18)五、DEM、DOM与等高线等数字产品的生成 (21)六、基于立体影像的数字化测图(IGS数字测图) (25)七、多个模型的拼接、成果图输出 (30)前言全数字摄影测量系统(VirtuoZo)是武汉适普软件有限公司与武汉大学遥感学院共同研制的全数字摄影测量系统,属世界同类产品的五大名牌之一。
全数字摄影测量系统是利用数字影像或数字化影像完成摄影测量作业。
由计算机视觉(其核心是影像匹配与影像识别)代替人眼的立体量测与识别,不再需要传统的光机仪器。
从原始资料、中间成果到最后产品都是数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息。
全数字摄影测量系统(VirtuoZo)不仅在国内已成为各测绘部门从模拟摄影测量走向数字摄影测量更新换代的主要装备,而且也被世界诸多国家和地区所采用。
在对全数字摄影测量系统(VirtuoZo)的使用中,武汉适普软件有限公司摸索和总结出一套简单易学的基本作业流程,使初学者能够更快更好的掌握该系统。
该作业流程包括:数据准备、参数设置、定向、核线采集与匹配、DEM与DOM以及等高线生成、数字化测图、拼接与出图七个步骤。
一、数据准备数字摄影测量所需资料:相机参数:应该提供相机主点理论坐标X 0、Y 0,相机焦距f 0,框标距或框标点标控制资料:外业控制点成果及相对应的控制点位图航片扫描数据:符合VirtuoZo 图像格式及成图要求扫描分辨率的扫描影像数据。
全数字化摄影测量系统(VirtuoZo NT)
全数字化摄影测量系统(VirtuoZo NT)
白杉;子荫
【期刊名称】《全球定位系统》
【年(卷),期】2003(028)003
【摘要】全数字化摄影测量系统VirtuoZo NT作为可以直接从数字影像中获取测绘信息的软件平台是一个全软件化设计、功能齐全、高度智能化的摄影测量解决方案,可提供从自动空中三角测量到测绘地形图的整体作业流程。
VirtuoZo NT采用国际最先进的超快速匹配算法确定同名点,匹配速度高达500—1000点/秒,可处理航空影像、SPOT影像和近景影像,包括8bit黑白影像和24bit彩色影像。
多种高效。
【总页数】1页(P52)
【作者】白杉;子荫
【作者单位】无
【正文语种】中文
【中图分类】P231.5
【相关文献】
1.基于VirtuoZo NT系统制作DEM方法的研究 [J], 李敬园
2.VIRTUOZO NT 2.0数字化摄影测量系统应用初探 [J], 王刊生
3.全数字化摄影测量系统在送电线路中的应用——浅谈VirtuoZo AAT计算精度分析 [J], 张京海;贾自甜
4.全数字化摄影测量系统VirtuoZo在架空送电线路工程中的应用 [J], 徐君民;朱
号东;奚毓敏;何顺华
5.数字摄影测量系统VirtuoZo NT与遥感信息定量化 [J], 林卉;杜培军
因版权原因,仅展示原文概要,查看原文内容请购买。
VirtuoZo七步教学手册(已经修改)讲解学习
V i r t u o Z o七步教学手册(已经修改)全数字摄影测量系统(VirtuoZo)七步教学手册目录前言 (4)一、数字摄影测量数据准备 (5)二、建立测区与模型的参数设置 (8)三、航片的内定向、相对定向与绝对定向 (12)1.内定向作业流程: (13)2.相对定向作业流程: (16)3.绝对定向作业流程: (18)四、同名核线影像的采集与匹配 (21)1.生成核线影像 (22)2.影像匹配 (23)五、DEM、DOM与等高线等数字产品的生成 (26)六、基于立体影像的数字化测图(IGS数字测图) (31)七、多个模型的拼接、成果图输出 (36)前言全数字摄影测量系统(VirtuoZo)是武汉适普软件有限公司与武汉大学遥感学院共同研制的全数字摄影测量系统,属世界同类产品的五大名牌之一。
全数字摄影测量系统是利用数字影像或数字化影像完成摄影测量作业。
由计算机视觉(其核心是影像匹配与影像识别)代替人眼的立体量测与识别,不再需要传统的光机仪器。
从原始资料、中间成果到最后产品都是数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息。
全数字摄影测量系统(VirtuoZo)不仅在国内已成为各测绘部门从模拟摄影测量走向数字摄影测量更新换代的主要装备,而且也被世界诸多国家和地区所采用。
在对全数字摄影测量系统(VirtuoZo)的使用中,武汉适普软件有限公司摸索和总结出一套简单易学的基本作业流程,使初学者能够更快更好的掌握该系统。
该作业流程包括:数据准备、参数设置、定向、核线采集与匹配、DEM与DOM以及等高线生成、数字化测图、拼接与出图七个步骤。
一、数据准备数字摄影测量所需资料:相机参数:应该提供相机主点理论坐标X0、Y0,相机焦距f0,框标距或框标点标控制资料:外业控制点成果及相对应的控制点位图航片扫描数据:符合VirtuoZo图像格式及成图要求扫描分辨率的扫描影像数据。
VirtuoZo NT全数字摄影测量系统实习报告

VirtuoZo 全数字摄影测量系统实习报告一、实习目的通过本次实习,了解4D产品的生产过程,熟悉使用VirtuoZo 全数字摄影测量系统生产4D产品的过程,掌握生产过程中各步骤的原理,加深对有关理论知识的理解。
(1)了解VirtuoZo数字摄影测量系统的功能;(2)掌握VirtuoZo数字摄影测量系统的作业流程;(3)加深对数字摄影测量基本理论、方法和过程的理解;(4)培养实际动手能力。
二、实习过程1、了解VirtuoZo 系统VirtuoZo系统是基于WindowsNT的全数字摄影测量系统,利用数字影像或数字化影像完成摄影测量作业。
由计算机视觉(其核心是影像匹配与影像识别)代替人眼的立体量测与识别,不再需要传统的光机仪器。
从原始资料、中间成果及最后产品等都是以数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息。
VirtuoZo的主要软件模块包括:解算定向参数、自动空中三角测量、核线影像重采样、影像匹配、生成数字高程模型、制作数字正射影像、生成等高线、制作景观图、DEM透视图、等高线叠加正射影像、基于数字影像的机助量测、文字注记、图廓整饰。
VirtuoZo的作业方式为自动化与人工干预。
系统在自动化作业状态下运行不须任何人工干预。
人工干预是作为自动化系统的“预处理”与“后处理”,如必要的数据准备、必要的辅助量测等及自动化过尚无法解决的问题。
人工干预不同于单的人工控制操作,而是尽可能达到了半自动化。
根据VirtuoZo制作4d产品的基本工作流程如下:2、数据准备(1)实习测区资料分析根据给定的实习的原始资料,了解测区的航线数、影像数、原始影像的分辨率、像片比例尺、全测区控制点分布、控制点数据、相机数据。
(2)建立测区数据准备完善后,进入VIrtuoZo主界面,首先要新建一个测区,通过文件打开测区,新建一个测区名,系统默认后缀名为blk,默认保存在系统盘下的wxf文件夹里。
VirtuoZo全数字摄影测量系统系列产品及模块
VirtuoZo全数字摄影测量系统系列产品及模块VirtuoZo全数字摄影测量系统系列产品及模块1. VirtuoZo Classic--全数字化摄影测量软件标准版2. VirtuoZo Lite--全数字化摄影测量软件普及版3. VirtuoZo Education--全数字化摄影测量软件教育版4. VirtuoZo OrthoKit--制作正射影像软件5. VirtuoZo MapEngine--数字化测图软件6. VirtuoZo MSMapper--MicroStation 测图接⼝软件7. VirtuoZo EPMapper--电⼒选线与量测三维可视化平台8. VirtuoZo OrthoMapper--正射影像数字测图软件9. VirtuoZo CADMapper--AutoCAD 测图接⼝软件10. VirtuoZo AAT--⾃动空中三⾓测量系统-----------------------------------------------------------------------------------------------VirtuoZo Classic--全数字化摄影测量软件标准版VirtuoZo标准版,⽣产DEM、DOM、 DLG 和 DRG 产品的全数字摄影测量软件。
其中还包括基于第三⽅DEM数据(USGS格式)制作正射影像、基于正射影像的数字测图以及与 Microstation 接⼝的⽴体数字测图和正射影像测图等功能。
VirtuoZo Lite--全数字化摄影测量软件普及版VirtuoZo 系列产品功能⾮常强⼤,同时也需要较⾼的硬件配置做⽀撑,但是对于部分教育⽤户,他们不需要系统达到数据⽣产的标准,对于去野外作业的⽤户,他们携带⾼配置的计算机⾮常不⽅便,只需要携带笔记本更为合适。
针对这⼀情况,适普公司开发了 VirtuoZo Lite,该版本是 VirtuoZo 的普及版本,提供 VirtuoZo 标准版本的所有功能,⽤户可使⽤传统的红绿眼镜进⾏⽴体观测。
VirtuoZo使用手册
“全数字摄影测量系统VirtuoZo”使用1.目的通过参观全数字摄影测量系统VirtuoZo,使学生初步了解全数字摄影测量系统的基本功能、一般作业流程以及主要产品的制作过程。
2.内容指导教师讲解全数字摄影测量系统基本概念、主要功能及一般作业流程。
学生按照要求,完成一些简单的操作,例如,内定向、相对定向、绝对定向、数字高程模型的建立、正射影像以及景观图的生产等。
3.资料准备每个学生提供一台数字摄影测量工作站VirtuoZo及立体观测设备一对数字航空影像以及相应的影像参数。
例如:主距、框标距、摄影比例尺、成图比例尺、控制点、数字高程模型的间隔参数以及正射影像的比例尺等。
4.操作步骤(1)准备工作:设置桌面区域大小为1024*768像素。
进入VirtuoZo的主界面,依次单击“文件”“打开测区”,输入一个新的测区名称。
单击“确定”之后,弹出“设置测区”对话框。
选择合适的“主目录”,“控制点文件”,“加密点文件”和“相机检校文件”。
同时将“摄影比例”和“成图比例”分别设置为8000和2000。
单击“文件”“引入”“影像文件”菜单项,系统弹出“输入影像”对话框,将“像素大小”设为-1,分别插入两个影像文件,“11156.tif”和“11155.tif”。
选中将彩色转黑白。
单击“处理”将其转换为vz格式。
单击“文件”“打开模型”菜单项,输入一个新的模型名称,系统弹出“设置模型参数”对话框,分别插入左右影像文件“11156.vz”(左影像)和“11155.vz”(右影像)将影像匹配参数除航向重叠度外均改为11。
并保存。
(2)内定向:“模型定向”“内定向”菜单项。
出在VirtuoZo的主界面上,依次单击“处理”现如下界面:单击“接受”按钮,开始进行内定向。
对左右两张影像,分别进行内定向。
依次调整8个控制点至适当位置。
完毕后单击“保存推(3)相对定向:在VirtuoZo的主界面上,依次单击“处理”“模型定向”“相对定向”菜单项。
当代数字摄影测量系统教材
当代数字摄影测量系统调查报告学院:测绘学院专业:测绘工程班级:2011级10 班学号:2011301610406姓名:龚珣2012-5-30 至 2012-5-5目录1、国内1.1、单机1.1.1、Virtuzo NT1.1.2、JX-4G1.2、集群1.2.1、Map Matrix1.2.2、数字摄影测量格网(DPGrid)1.2.3、JX-51.2.4、GEOWAY CIPS2、国外2.1、单机2.1.1、Inpho2.1.2、像素工厂(Pixel Factory)2.1.3、ImageStation SSK2.1.4、LPS2.2、集群2.2.1、1.1.1、VirtuoZo NTVirtuoZo NT 系统是适普软件有限公司与武汉大学遥感学院共同研制的全数字摄影测量系统,属世界同类产品的五大名牌之一。
此系统是基于WindowsNT 的全数字摄影测量系统,利用数字影像或数字化影像完成摄影测量作业.VirtuoZo NT 基本软件有:·解算定向参数·自动空中三角测量·核线影像重采样·影像匹配·生成数字高程模型·制作数字正射影像·生成等高线·制作景观图、DEM 透视图·等高线叠加正射影像·基于数字影像的机助量测·文字注记·图廓整饰1.1.2、JX-4GJX-4G数字摄影测量工作站(DPS)是结合生产单位的作业经验开发的一套半自动化的微机数字摄影测量工作站,主要用于各种比例尺的数字高程模型“DEM”、数字正射影像“DOM”、数字线划图“DLG”生产,是一套实用性强,人机交互功能好,有很强的产品质量控制的数字摄影测量工作站。
一、实用性1、可视化:矢量(包括线型和符号)、DEM和TIN,可映射到立体屏幕上栅格地图可映射到立体屏幕上城市三维数据可在立体屏幕上显示二维屏幕可同时进行矢量、DEM、TIN和DOM的迭加、显示和编辑影像漫游、图形漫游、测标漫游,实现了方便的实时立体编辑命令2、自动化:自动内定向、相对定向半自动绝对定向高可靠性的自动匹配由特征点和特征线生成TIN和DEM由TIN内插等高线3、交互性:DEM立体编辑TIN 立体编辑等高线立体编辑三维城市数据立体编辑超过100条的矢量编辑命令4、速度与精度:实现高速全图像平滑漫游高精度、高密度的特征点、线的自动提取高效率高精度的DEM生成生成的等高线形态与地形很吻合由TIN生成高质量正射影像可以和矢量精确套合地球曲率的改正使得小比例尺(如1:10万航片测图)定向精度提高5、便利性:利用二次大地定向的功能,可以实现先内业后外业的作业方式利用第二原始影像功能,可以导入旧的空三数据利用DEM(或TIN)自动将二维数据转换为三维数据,或经少量立体观测使二维房屋数据加入高程坐标变成三维房屋数据手轮立体测图与鼠标立体测图的快捷切换二、兼容性1、多种影像处理:传统航空照片(最大分辨率12μm)立体IKONOS立体SPOT5立体WORLDVIEW立体Geoeye立体IRS-P5立体QUICKBIRD立体ADEOS立体RADAR资源三号近景ADS40/80、DMC、UCD、SWDC等数码相机影像2、可完成多种任务:矢量测图、DEM、TIN、DOM、三维城市3、输出格式:矢量—DGN, DXF, shapefile(ARC GIS), ASC和JX4DEM—ASC,DXF 和JX4(中国国家标准)TIN—JX4, ASC 和DXFDOM—Tiff 和TFW4、与下列三种软件实时联机:Microstation(95/SE/J/V8)Auto CAD(2000/2002)ARCGIS 8.3/9.0/9.35、多种空三数据导入:Pat-B/LH/ImageStation/JX4/Vz/SSk等6、利用下列数据直接建立模型:外方位元素、矩阵7、利用现有数据:在测图时引用或参考已有矢量从已有向量中提取有关的层作为特征线辅助相关并生成TIN利用已有矢量或DEM生成正射影像8、自主设计层控文件9、通过设计action文件实现测图组合命令三、技术优势1.双屏幕显示,图形和立体独立显示于两个不同的显示器上,使得视场增大,立体感强,影像清晰、稳定,便于进行立体判读。
数字摄影测量VirtuoZo的工作流程和运用
数字摄影测量VirtuoZo的工作流程和运用摘要:简单介绍了航测地形图成图的内业数据处理的一般步骤,结合VirtuoZo.NT版数字摄影软件进行了具体说明。
关键词:航测解析空中三角测量数字摄影测量一、引言随着我国经济体制改革的进一步深入,国家基础设施建设得到了前所未有的发展,在讲究速度效益的今天,利用传统方式、手段测绘大面积地形图已跟不上历史的进程。
航空摄影测量成图已经在这方面显现了巨大的优势,我院在2001年购买了一批VirtuoZo航测成图软件,在生产中发挥了重要作用。
二、原理概述航空摄影测量制作地形图大体上分三个阶段:航空摄影、航测外业和航测内业。
航空摄影就是在航摄飞机上安装航空摄影机,从空中对测区地面作有计划的摄影,以取得适合航测制图要求的航摄像片,航测外业是野外实地进行像片联测和判读调绘,像片联测的目的是利用地面控制点把航摄像片与地面联系起来;像片的判读调绘是在像片上补绘,没有反映出的地物、地类界等,并搜集地图上必需有的地名、注记等地图元素,此外,对于内业难以施测的平坦地区的等高线,航摄漏洞以及大面积的云影、阴影、影像不清地区的补测工作,也是航测外业工作的任务,航测内业就是根据航摄像片和航测外业成果在室内专用的航测仪器上的测绘地形原图。
三、地形图的航测内业制作方法和步骤应用航摄像片测绘地形原图,无论是单张像片纠正或立体测图都需要一定的数量的控制点。
在绝大多数的情况下,为了减少外业的工作量,在野外只测定少量必要的地面控制点,而采取在室外内利用像片之间内在的相互联系的几何特性,用摄影测量的方法进行增补,这种在室内应用摄影测量方法借助少量地面控制点求得测图时所需控制点地面坐标的工作,匀称地面控制点的摄影测量加密。
控制点的摄影测量加密是摄影测量的一项主要内容。
随着电子计算机工业的发展,测绘计算也采用了电子计算机,控制点的摄影测量加密现今都使用解析空中三角测量。
解析空中三角测量是将建立的投影光束、单元模型或航带模型以至区域模型的数学模型,根据少量地面控制点,按最小二乘法原理进行平差计算,解求出各加密点的地面坐标,解析空中三角测量按加密区域分为单航带法和区域网法两类。
全数字摄影测量系统VirtuoZo的认识及使用
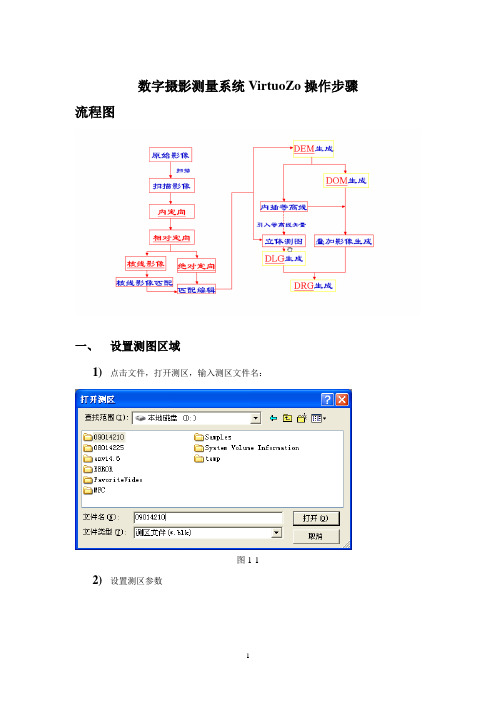
数字摄影测量系统VirtuoZo操作步骤流程图
一、设置测图区域
1)点击文件,打开测区,输入测区文件名:
图1-1
2)设置测区参数
图1-2
二、设置模型参数
1)影像数据的导入
图2-1
2)模型参数的设定:
图2-2 三、内定向:
1)左影像内定向:
图3-1-1
图3-1-2
2)人工方式,自动方式进行调整
图3-2
3)右影像内定向(图略)
四、相对定向:
1)处理—>模型定向—>相对对象
图4-1 2)自动相对定向
图4-2
五、绝对定向:
1)寻找相应的控制点,对控制点进行精确调整
图5-1 六、核线重采样
图6-1
七、影像匹配
图7-1
八、生成DEM
图8-1
九、生成正射影像
图9-1 十、生成等高线
图10-1
十一、等高线正射影像
图11-1 十二、立体影像
图12-1
图12-2 十三、正射影像
图13-1
十四、等高线影像
图14-1
十五、等高线叠合影像
图15-1
十六、透视显示
图16-1
十七、立体显示
图17-1
图17-2。
“全数字摄影测量系统VirtuoZo”使用操作指南
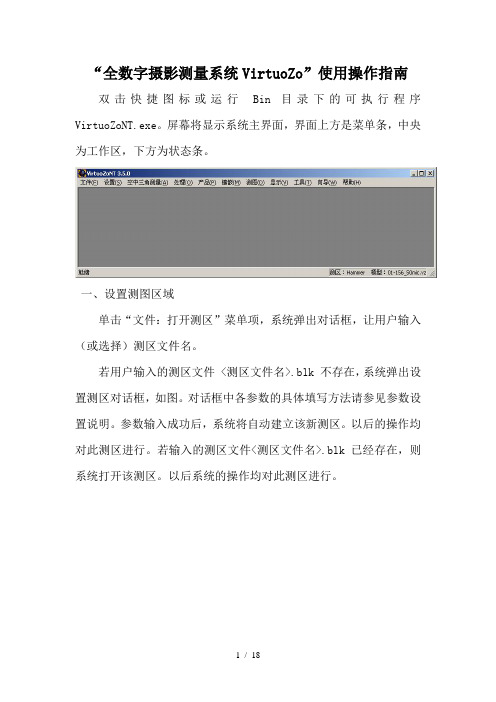
“全数字摄影测量系统VirtuoZo”使用操作指南双击快捷图标或运行Bin 目录下的可执行程序VirtuoZoNT.exe。
屏幕将显示系统主界面,界面上方是菜单条,中央为工作区,下方为状态条。
一、设置测图区域单击“文件:打开测区”菜单项,系统弹出对话框,让用户输入(或选择)测区文件名。
若用户输入的测区文件 <测区文件名>.blk 不存在,系统弹出设置测区对话框,如图。
对话框中各参数的具体填写方法请参见参数设置说明。
参数输入成功后,系统将自动建立该新测区。
以后的操作均对此测区进行。
若输入的测区文件<测区文件名>.blk 已经存在,则系统打开该测区。
以后系统的操作均对此测区进行。
按照教员提供的参数设置测区相关文件。
1、测区目录和文件包括:主目录:输入测区所在的目录。
此项在测区建立后变灰,用户不能再进行修改。
控制点文件:输入控制点文件名。
可直接输入控制点文件名,或单击文本框右侧的文件查找按钮,选择已建立的当前测区的控制点文件。
加密点文件:输入模型控制点文件名。
可直接输入模型控制点文件名,或单击文本框右侧的文件查找按钮,选择已建立的模型控制点文件。
模型控制点通常就是空中三角测量平差解算出来的加密点。
相机检校文件:输入相机检校文件名。
建议根据使用的相机类型命名,如 RC10.cmr。
2、基本参数摄影比例:摄影比例尺分母。
航带数:测区的航带数目。
影像类型:原始的影像类型有六种。
它们依次是量测相机、非量测相机、卫星影像、IKONOS 影像、QuickBird 影像和可量测数码相机。
3、缺省测区参数设置包括:DEM 格网间隔:设置 DEM 格网间隔,间隔的单位与控制点单位相同。
等高线间距:设置等高线间距,其单位与控制点单位相同。
DEM 旋转:设置 DEM旋转或不旋转。
选择不旋转选项,表示 DEM 是沿控制点所在的坐标系方向建立;选择旋转选项,表示 DEM 采集方向与控制点所在的坐标系存在一定的旋转角度。
全数字摄影测量系统VirtuoZoNT
返回
数字摄影测量要解决的主要问题
1.影像匹配 人眼观察 影像相关 2.影像识别 目视解译(判读、识别) 计算机自动解译(分类)
数字摄影测量核心-影像匹配
影像识别
VirtuoZo NT 基本操作流程
返回
第一步:数据准备
准备原始资料
控 制 点 资 料
相 机 检 校 文 件
航 片 结 合 表
航 摄 负 片
返回
6)保存相对定向结果:鼠标右键选择菜单“保 存”
相对定向精度: 每点残差 0.050mm ; 中误差 0.010mm
3.绝对定向
1)普通方式的绝对定向:选择右键菜单 “绝对定向—普通方式”,进行定向计 算,在定向结果窗中显示绝对定向的中 误差及每个控制点的定向误差。
返回
2)检查与调整:在弹出控制点微调窗, 对残差过大的控制点,可进行微调。
1.在e盘新建文件夹:virlog 2.新建一个测区:
1)打开VirtuoZo 2)文件-打开测区,新建一个名为hammer.blk的测区 ,保存在e:\virlog。此文件为索引文件。 3)在弹出的设置测区对话框中,进行相应设置。
3.设置相机参数文件:
点击 设置-相机参数
C:\VirtuoZo\Example\hamer\images\hamerindex\rc30.cmr
以上DEM、DOM、DRG、DLG被合称为4D 数字产品 返回
数字摄影测量 -----基本流程
原始影像
扫描
DEM生成
DOM生成 内插等高线
引入等高线矢量
扫描影像 内定向 相对定向 核线影像 核线影像匹配 绝对定向 匹配编辑
VirtuoZo操作指南(试用版)
全数字摄影测量软件VirtuoZo操作指南2007年7月西南交通大学测量系目 录序言 (4)第1章数字摄影测量理论介绍 (5)1.1 数字摄影测量基本概念 (5)1.2扫描影像空间分辨率介绍 (8)第2章数据准备 (10)2.1 数字化影像 (10)2.2 控制点资料 (11)2.3 相机检校文件 (14)2.4 特别说明 (14)第3章立体模型建立 (15)3.1测区、模型建立及参数设置 (15)3.1.1新建测区 (15)3.1.2参数设置 (16)3.1.3创建立体模型 (18)3.2模型定向 (19)3.2.1内定向 (19)3.2.2相对定向 (20)3.2.3 刺入控制点 (21)3.2.4绝对定向 (22)3.3生成核线影像 (23)3.4影像匹配及编辑 (23)3.4.1影像匹配 (23)3.4.2匹配结果编辑 (24)第4章产品生成及编辑 (27)4.1 DEM生成与编辑 (27)4.1.1生成DEM (27)4.1.2 DEM编辑 (27)4.1.3显示DEM成果 (30)4.2制作正射影像和生成等高线影像 (31)4.2.1制作正射影像 (31)4.2.2正射影像修补 (32)4.2.3生成等高线 (36)4.2.4等高线和正射影像叠合 (36)4.2.5显示各成果 (36)4.3 DEM拼接和影像镶嵌 (38)4.3.1 DEM拼接 (39)4.3.2影像镶嵌 (40)4.3.3成果显示 (40)第5章数字化测图 (43)5.1地物量测 (43)5.1.1新建矢量文件 (43)5.1.2房屋量测 (45)5.1.3道路量测 (46)5.1.4点状地物量测 (47)5.1.5地物矢量信息编辑 (48)5.2地貌测图 (49)5.2.1引入等高线文件 (50)5.2.2修测等高线 (50)序言数字摄影测量是一门实践性很强的学科,通过理论学习和操作实践,有助于学生掌握数字摄影测量的基本原理和处理方法。
全数字化摄影测量系统VirtuoZo项目简介
六、侧绘、遥感全数字化摄影测量系统VirtuoZo项目简介:VirtuoZo是我校全数字化自动测图系统WuDAMS的商品化名称,是国际同类五大著名软件系统之一。
经过近二十年的奋斗,VirtuoZo的核心技术处于国际领先水平,目前已研制开发了工作站、微机两大类。
其主要功能为从输人的数字地面模型制作带等高线的正射影象图与三维立体模型与交叉式全自动地物量测,可用于摄影测量、遥感与地理信息系统的数据采集与更新、测图与地图修测等。
VirtuoZo工作站版本由澳大利亚VirtuoZo System公司与香港中威图形有限公司代理在世界市场上销售,已有40余套销售到美国、日本、澳大利亚等国家和地区,国内销售已超过10套,已推广到广东国土局、山东测绘局等单位。
VirtuoZo 微机版本商品化工作基本完成,即将推向国内市场。
近景摄影测量技术项目简介:该技术可用不同摄影方式(包括多重摄影)、不同摄影机、不同控制点布局和不同精度要求等进行多种近景摄影测量,有国内当前近景摄影测量解析处理最完整的软件系统,能广泛应用于工业、农业、水利、建筑、医学、生物、考古、刑侦等领域。
先后完成了矿区危崖产状、水轮机叶片、奶牛形体等20多项工程,特别是完成了香港志莲寺的整体搬迁重建工程的结构设计与安装施工监理。
连续运行卫星定位导航服务系统是利用GNSS卫星导航定位技术,在一个城市、一个地区或一个国家根据需求按一定距离建立长年连续运行的一个或若干个固定GNSS参考站,利用计算机、数据通信设备和互联网络(LAN/WAN)技术将各个参考站与数据中心组成网络,由数据中心从参考站采集数据,利用参考站网软件进行处理,然后向各种用户自动地发布不同类型的卫星导航原始数据、各种类型RTK改正数据等组成的一个网络系统。
这个系统能够全年365天,每天24小时连续不断地运行,全面取代常规大地测量控制网,全天候地支持各种类型的GNSS测量、定位、变形监测和放样作业。
VirtuoZo数字摄影测量实习指导书(土地专用)
《摄影测量与遥感》实习指导书(数字摄影测量部分)中国矿业大学环境与测绘学院二零一零年一月第一章数据处理过程一、整体过程二、数据准备四、定向过程注:图中(以下图相同)虚线框内容表示为可选操作,若用户在做完上步操作时已达到要求时,则可跳过不做虚线框中的操作,直接进入到下步操作。
六、核线采集与匹配七、数字化测图第二章单模型处理操作过程(以VirtuoZoNT 3.7软件为例)一、建立测区和模型,并进行一些相关的设置1、数据准备数据准备包括:控制点分布图,影像,控制点文件,相机参数文件2、新建或打开一个测区首先,我们需要建立一个测区,因为我们以后的工作是在该测区下进行的。
测区就是待处理的航空影像(当然也包括各种卫星影像或近景影像)所对应的地面范围(或区域)。
VirtuoZo主界面中的文件菜单下没有新建菜单项,而是将新建与打开合并为打开测区。
单击打开测区菜单项,系统弹出打开或创建一个测区对话框,如下图所示:单击对话框中的打开,系统弹出设置测区对话框,以设置测区参数,如下图所示:其中,摄影比例:是指摄影比例尺分母,摄影比例尺在航摄时就已确定,由执行航飞任务的单位为您提供,默认为30000。
航带数:测区内航带数目,默认为1条。
影像类型:用于影像的类型选择,VirtuoZo支持量测相机影像、非量测相机影像、卫星影像、IKONOS 影像、QuickBird影像等,请确保测区的影像类型和您即将使用的影像类型一致。
3、引入影像文件在主菜单上单击文件→引入→影像文件菜单项,系统弹出输入影像对话框。
该对话框中的好多参数与测区参数中的值是一致的,在此没必要对其进行修改。
我们只需给定像素大小即可(由扫描仪的参数而定,一般情况下,扫描单位会提供给您具体数值,如果您使用提供的训练数据,请把像素大小设为0.045),如果选为-1,系统将会读出文件内保存的像素大小,并自动填回去。
至于其它的选项,要根据具体情况而定。
比如选中屏蔽警告信息项,则在转换影像的过程中,所有的警告信息和错误提示对话框都不再出现,防止转换过程因等待操作人员确认而停止,转换中发现有问题的文件会有相应标记选中删除原始影像项,转换影像的过程中,系统将会把已经经过转换的原始影像删除,以节省磁盘空间(一旦原始影像被删除,以后想再利用它们就不可能了)。
矿产
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
矿产
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
添加第二 条航带的3 张影像
6.新建模型:
1)打开 C:\VirtuoZo\Example\hamer\images\hamerIndex.html
2)文件-打开模型,新建一个名为157-156.mdl的测区 ,保存在d:\hammer\image。
第三步:航片的内定向、相对定 向与绝对定向
内定向:建立影像扫描坐标与像点坐标 的转换关系。
VirtuoZo可自动识别框标点,自动完成 扫描坐标系与相片坐标系间变换参数的 计算,自动完成相片内定向。
相对定向:通过量取模型的同名像点, 解算两相邻影像的相对位置关系;
VirtuoZo;利用二维相关,自动识别左 、右像片上的同名点,一般可匹配数十 至数百个同名点,自动进行相对定向。 并可人工对误差大的定向点进行删除。 并用微调按钮进行控制点精确定位,理 论上需要3个控制点,一般为6个。
1.在e盘新建文件夹:virlog
2.新建一个测区:
1)打开VirtuoZo 2)文件-打开测区,新建一个名为hammer.blk的测区
,保存在e:\virlog。此文件为索引文件。 3)在弹出的设置测区对话框中,进行相应设置。
3.设置相机参数文件:
点击 设置-相机参数
先对左片01-157_50mic.tif.vz进行内定向
内定向:建立影像扫描坐标与像点坐标的转换关系,
求取转换参数,通常选取像片的四个框标点,组成误 差方程、平差求解;
相对定向:确定摄影时像对的两张相片之间的相对
位置关系,其目的就是使得同名光线对对相交,建立 起一个与实地相似的立体几何模型;
绝对定向:相对定向建立的模型没有比例尺和坐标
系,为了测制地形图,需要将模型依据一定数量的已 知控制点归化到要求 比例尺上,并将其置于大地坐标 系的正确方位中,这个过程为绝对定向。 其实质是解求7个绝对定向元素,一般用4个角点求取;
数字 化原 始航 片( 扫描
)
卫星 影像 及相 应参
数
否 检查原始资料是否完整
C:\VirtuoZo\Example\hamer\images\hamerindex
第二步:建立测区与模型的参数设置
建立测区
设置控制点文件
转入原始影像
设置相机参数文件
建立立体模型
设置立体模型生成产品的参数
1. 建立测区:输入测区的相应参数(给出测区路径
绝对定向:通过量取地面控制点或内业 加密点对应的像点坐标,解算模型的外 方位元素,将模型纳入到大地 坐标系中 。
绝对定向是在相对定向完成后进行。也 可以利用加密成果进行绝对定向。
数字摄影测量的定向过程
引入外方位元素 已知外方位元素
填入外方位元素
调用主界面程序 直接绝对定向
内定向处理
建立框标模板 自动匹配框标中心
数字摄影测量
-----几个基本概念
核线影像:在一个立体模型中,地面上任意一点与
两摄站中心构成的平面(核面)与左右影像面的交线 称为左右核线,沿核线方向对原始影像重新采集的影 像称为核线影像,(见下图),由此可见,位于同名 核线上的像点,不存在上下视差;
数字摄影测量
-----几个基本概念
左核线 S1
手工干预调节
自动相对定向 人工干预调整相对定向点
半自动绝对定向
引入外方位元素 由 PATB 解 算 的 绝对定向参数文件
将其转换为 VirtuoZo识 别 的 外方位元素文件
调用主界面程序 直接绝对定向
双屏方式调整绝对定向点
立体方式调整绝对定向点
1.内定向
1)调用内定向程序(处理-模型定向-内 定向),建立框标模板。
以上DEM、DOM、DRG、DLG被合称为4D 数字产品 返回
数字摄影测量 -----基本流程
原始影像
扫描
扫描影像
内定向
相对定向
核线影像 绝对定向 核线影像匹配
匹配编辑
DEM生成
DOM生成 内插等高线
引入等高线矢量
立体测图 叠加影像生成 DLG生成
DRG生成
二、数字摄影测量
C:\VirtuoZo\Example\hamer\images\hamerindex\rc30.cmr
4.建立加密点文件:
点击 设置-地面控制点
C:\VirtuoZo\Example\hamer\images\hamerindex\hamer.gxyz
5.转换影像文件: 1)点击 文件-引入-影像文件
返回
数字摄影测量要解决的主要问题
1.影像匹配 人眼观察 影像相关 2.影像识别 目视解译(判读、识别) 计算机自动解译(分类)
数字摄影测量核心-影像匹配
影像识别
VirtuoZo NT 基本操作流程
返回
第一步:数据准备
准备原始资料
控 制 点 资 料
相 机 检 校 文 件
航 片 结 合 表
航 摄 负 片
及测区名称、控制点文件路径及文件名、加密点文件 路径及文件名、相机参数文件路径及文件名等);
2. 建立控制点文件:将该测区已知的地面控制点
坐标输入相应的控制点文件中;
3. 建立相机参数文件:将相机参数输入相应的文
件中保存;
4. 引入扫描影像:将扫描后的影像转化为VZ格式
的影像数据;
To be continued
a1
左右视差
S2
核
a2′ a2 a2〞面源自A′ Ay(q) x(p)
右核线
上下视差 地表
返回上页
数字摄影测量
-----几个基本概念
DSM:数字表面模型(Digital Surface Model); DEM:数字地面(高程)模型(Digital Elevation Model); DOM:数字正射影像模型(Digital Ortho-Image Model ); DRG:数字删格地图(Digital Raster Graphics); DLG:数字线划(矢量)图(Digital Line Graphics) ;
全数字摄影测量系统
VirtuoZoNT
内容结构
一、摄影测量基本原理 二、数字摄影测量 三、VirtuoZoNT的基本操作流程 四、单模型4D产品的制作 五、多模型的拼接 六、交互式矢量测图系统
第十一章 摄影测量的外业
§11-1 像片控制点的联测
数字摄影测量
-----几个基本概念