仿鱼机器人的运动仿真
多关节鱼形机器的设计
摘要根据水下鱼形机器人的设计方案进行仿真,分析运动规律及校核机构。
利用UG中三维建模、运动仿真及设计仿真等模块,对已经设计好的机器鱼进行系统仿真,并比较输出数值和计算数值的关系,从而完善设计过程。
主要对机器鱼的四个部分进行分析,分别是驱动机构、沉浮机构、转向机构、充电机构。
其中,驱动机构由尾部摆动机构实现,鱼身后半部和鱼尾的两节做有相位差的摆动,通过摆动来击打水从而推动鱼身前进。
沉浮功能由鱼身前半部分的侧鳍通过转动一定角度来实现的。
转向功能,由鱼身前半部分的鳍通过转动一定的角度来实现的,鳍与鱼身竖直方向的夹角的改变使其受到水的推动力的向左或者向右的分力,从而使鱼身可以绕其重心进行旋转。
外形设计是根据金枪鱼的外形进行多次拟合而归纳而成的。
最终对整个机器鱼进行配重,使重力中心和浮力中心在一条直线上,保证机器鱼能在水中平稳正常运动,同时控制模块中植入远程通信功能。
关键词:水下鱼形机器人;运动仿真;远程通信ABSTRACTAccording to the underwater fish-shaped robot to simulate the design, analysis and verification body movement. UG in the use of three-dimensional modeling, motion simulation and design of simulation modules, the fish have been designed machine system simulation, and compare the output value and the numerical calculation, in order to improve the design process. The main fish-machine analysis of four parts, namely the drive mechanism, ups and downs mechanism, steering, charging mechanism. Among them, the drive mechanism from the rear swing institutions, fish and fish tail behind the first half there are two of the swing phase, through the swing to hit the water in order to promote the fish forward. Rise and Fall of the functional from the first half of the fish lateral fins rotate through a certain angle to achieve. Shift function, by the fish through the latter part of the pelvic rotation to achieve a certain point of view, the ventral fin fish vertical with the angle between the direction of change to be the driving force of water to the left or the right of the play, so that fish can rotate around its center of gravity. Design is based on the shape of tuna and summarized a number of fitting together. Eventually the whole fish weight machines, so that center of gravity and buoyancy in a straight line, the fish can assure a smooth and normal movement in the water. Control to transplant long range correspondence in the mold piece function in the meantime.Keywords: Fish-shaped underwater robot; motion simulation; c ommunication目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1引言 (1)1.2水下鱼形机器人技术的基本概念 (1)1.2.1 鱼类游动方式的分类 (1)1.2.2 仿鱼鳍机器鱼的特点 (2)1.3仿生机器鱼研究概况 (2)1.4目前研究热点及未来发展方向 (5)1.5本课题研究内容 (5)第2章UG中运动仿真和有限元分析模块功能介绍 (7)2.1运动仿真介绍 (7)2.1.1 运动仿真模块 (7)2.1.2 运动仿真模块能执行何种类型分析 (7)2.1.3 如何创建运动仿真 (7)2.1.4 运动仿真的机构运动方式 (7)第3章水下鱼形机器人机构确定 (9)3.1沉浮机构的确定 (9)3.2转向机构的确定 (13)3.3舵机选择 (13)3.4整体结构位置设计及外形确定 (14)3.4.1 整体结构尺寸确定 (14)3.4.2 外形结构尺寸确定 (15)第4章基于UG的鱼形机器人的运动仿真 ............................................. 错误!未定义书签。
仿生机器鱼玩具的机构设计_仿真与实现
4 ) 设计结果:结构、运动、控制数据等。
3. 仿生机器鱼的运动仿真
图 5(a)给出了一个基于鲹科鱼类设计的摆动 轮廓图。此设计方案中,关节数 n=4,摆动部占身 长比例 r=0.6,波长倍数 0.6 ,各关节长度比例 为 1:0.93:0.76:0.61,摆动的曲线方程为:ybody= [0.05x+0.09x2][sin(0.5x)],周期采样数 m=18。 其仿真游动效果见图 5(b)。
成的包络区域的面积,m 情况,存在等式约束与
不等式约束,我们选择混合罚函数法来进行参 数优化。
惩罚函数法通过构造惩罚函数把有约束优化 问题转换为无约束优化问题,采用坐标轮换等方 法实现对无约束优化问题的求解,实现对有约束 问题的参数优化。通过对关节结构尺寸的优化, 得到按照波动方程ybody(x,t)进行游动的仿生机器 鱼的最优一组结构尺寸参数。
参数。 3.5 设计实现 鱼类身体的摆动大体按照式(1)所表示的波
动 方 程 进 行 摆 动 ,由 于 机 器 鱼 是 由 多 个 僵 硬 的 连 杆 铰 接 组 成 ,为 实 现 波 动 运 动 ,每 个 关 节 点 必 须 在 理 论 曲 线 上 。关 节 点 对 理 论 曲 线 的 匹 配 过程如图 3。当前关节与前一关节的延长线在 连接处产生一个夹角,骨架的运动就是在驱 动电机带动下,通过改变夹角的值来产生运 动。
2. 仿生机器鱼的设计思想
仿生机器鱼运动控制算法设计及性能评估
仿生机器鱼运动控制算法设计及性能评估随着科技的不断发展,仿生机器鱼作为一种模拟真实鱼类行为的智能机器人得到了广泛的关注与研究。
仿生机器鱼具备了真实鱼类的机械结构和运动特征,能够在水中自由地游动、转向和操纵,具备了一定的灵活性和适应性。
在这篇文章中,我将着重探讨仿生机器鱼运动控制算法的设计和性能评估。
首先,我们需要考虑的是仿生机器鱼的运动控制算法的设计。
仿生机器鱼的运动控制算法需要模拟真实鱼类的运动方式,并具备自主的决策能力,以实现在水中灵活自如的运动。
为了实现这一目标,可以考虑以下几个关键因素:1. 运动模式选择:仿生机器鱼可以采用鱼类行为学中已有的运动模式,如直线游动、转向、盘旋等。
选择合适的运动模式可以使机器鱼更加适应不同的环境和任务需求。
2. 运动轨迹规划:仿生机器鱼需要通过计算和规划来确定运动轨迹,以实现预设的任务目标。
可以采用轨迹规划算法来生成运动轨迹,如最优路径规划、遗传算法等。
3. 运动控制策略:仿生机器鱼需要根据环境信息和任务目标来选择合适的运动控制策略,以实现良好的运动性能。
可以采用自适应控制、反馈控制等方法来实现运动控制策略。
4. 感知与感知处理:仿生机器鱼需要通过传感器来感知环境信息,并通过感知处理技术来提取和处理有效的信息。
可以采用视觉传感器、压力传感器等来感知水中的障碍物、水流等信息。
5. 控制器设计:仿生机器鱼的控制器设计需要考虑到运动特性、动力学模型和控制算法的综合因素。
可以采用模糊控制、神经网络控制等方法来设计控制器,以实现精确的运动控制。
在设计完成仿生机器鱼的运动控制算法之后,我们需要对其性能进行评估。
性能评估是评估算法的有效性和可行性的过程,可以通过以下几个方面进行评估:1. 运动准确性:评估仿生机器鱼的运动控制算法在执行各种任务时的准确性。
可以通过比较仿真结果和实际测试结果来评估运动的准确性。
2. 运动稳定性:评估仿生机器鱼在不同环境下的运动稳定性。
可以通过检测机器鱼的姿态、速度等参数来评估运动的稳定性。
仿生鱼鳍单元设计及运动仿真分析
仿生鱼鳍单元设计及运动仿真分析何建慧;章永华【摘要】Based on motor-cam-slider-crank mechanism,a biomimetic fish fin unit was developed.Then,the kinematics of biomimetic fish fin unit was analyzed,the relationship between cam and fin ray was also established.In combination with Adams simulation software,the change of angular displacement,angular velocity and angle acceleration of fin ray was presented under different cam angular velocities of π/6 rad·s-1 and 2π/3 rad·s-1.The results indicate that:the curves of angular displacement,angular velocity and angle acceleration with time present the same undulating rule with equal frequency.However,the ray angular acceleration time curve presents small asymmetry relative to the zero line.Moreover,the frequency and the amplitude of angular displacement,angular velocity and angle acceleration increase with the increase of motor rotation velocity.This motion characteristics coincide with the motion law of biological fins.The development of current biomimetic fish fin unit provides a reference for the further research on bio-propulsor.%利用电机-凸轮-滑块-曲柄机构,设计了一款仿生鱼鳍单元.对仿生鱼鳍单元的运动学进行分析,建立了凸轮运动参数与鳍条运动参数之间的关系.结合Adams仿真软件,分析凸轮角速度分别为π/6和2π/3 rad·s-1时鳍条运动角位移、角速度和角加速度随时间的变化.结果显示:鳍条角位移、角速度和角加速度曲线均呈现等频率波动规律,但鳍条角加速度时间曲线相对零位呈现小幅度的不对称性;随着电机转速增加,鳍条角位移、角速度和角加速度的变化频率增大,幅值也随之增大.上述运动特征与生物鱼鳍的运动规律相符,该仿生鱼鳍单元结构设计为进一步研制仿生鳍推进器提供参考.【期刊名称】《系统仿真技术》【年(卷),期】2017(013)002【总页数】5页(P170-174)【关键词】仿生鱼鳍;鳍条;凸轮;曲柄-滑块机构【作者】何建慧;章永华【作者单位】台州职业技术学院机电工程学院,浙江台州 318000;台州职业技术学院机电工程学院,浙江台州 318000【正文语种】中文【中图分类】TP242.6鱼类因非凡的运动能力使其能够在复杂的水下环境中生存[1],这一点引起了研究人员广泛的关注,并于近二十年内开发了大量的仿生机器鱼推进器。
机器鳄鱼运动的仿生步态规划方法
机器鳄鱼运动的仿生步态规划方法
黄可凡;贾文祯;韩路路;蒋建平
【期刊名称】《机械科学与技术》
【年(卷),期】2024(43)4
【摘要】模仿真实动物的运动步态是仿生机器人步态规划研究的一个重点。
针对一种新型仿生机器鳄鱼的步态规划问题,采用动作捕捉技术获取了真实鳄鱼的运动步态。
在此基础上,利用高斯牛顿法求解出机器鳄鱼的腿部关节角度,拟合得到与真实步态轨迹相似性较好的仿生步态,并分析了机器鳄鱼在该步态下的运动稳定性。
虚拟样机的运动仿真实验结果表明:机器鳄鱼能用与真实鳄鱼相似的步态,以0.3
m/s的速度向前爬行,且具备较高的稳定性。
【总页数】7页(P566-572)
【作者】黄可凡;贾文祯;韩路路;蒋建平
【作者单位】中山大学航空航天学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.基于足端轨迹的仿生四足机器人运动学分析与步态规划
2.一种仿人机器人斜坡运动步态规划方法
3.气动柔性关节仿生六足机器人步态规划与运动性能研究
4.仿生机器人运动步态控制:强化学习方法综述
5.仿生机器鱼步态控制及闭环运动控制方法综述
因版权原因,仅展示原文概要,查看原文内容请购买。
仿生学在机器人技术研究中的应用案例分析

仿生学在机器人技术研究中的应用案例分析人工智能和机器人技术的发展已经取得了重大突破,仿生学正逐渐成为机器人技术研究的重要方向之一。
仿生学是通过模仿生物体的结构和功能,将其应用于机器人设计和开发中。
本文将以1800字左右的篇幅,通过案例分析,探讨仿生学在机器人技术研究中的应用。
案例一:鸟类仿生机器人鸟类仿生机器人是一种通过模仿鸟类的飞行姿态和机械结构,设计和制造的机器人。
这种仿生机器人可以实现像真实鸟类一样的飞行表现和机动能力。
通过对鸟类翅膀的结构和运动方式的研究,科学家们设计出了一种类似鸟翼的机械结构,使得仿生机器人可以更加灵活地飞行和机动。
仿生学在鸟类仿生机器人的研究中被广泛应用,如仿鸟翼结构的设计、鸟类飞行姿态的模拟等。
这一技术的应用不仅能够提高机器人飞行效率,还可以应用于无人侦察、空中测绘等领域,具有重要的应用价值。
案例二:鱼类仿生机器人鱼类仿生机器人是一种通过模仿鱼类的游泳姿态和结构,设计和制造的机器人。
仿生学在鱼类仿生机器人的研究中发挥了重要作用,能够帮助科学家们理解鱼类在水中的游泳方式和动作机理。
通过仿生学的方法,科学家们设计出了类似鱼类的鳍和尾巴结构,使得仿生机器人可以像真实鱼类一样游动。
这种仿生机器人不仅在水下探测和水生生物学研究中具有重要应用,还可以用于海底考古、水下作业等领域。
案例三:昆虫仿生机器人昆虫仿生机器人是一种通过模仿昆虫的结构和行为,设计和制造的机器人。
昆虫在细小环境中具有出色的适应能力和行动能力,利用仿生学的方法,科学家们可以借鉴昆虫的结构和行为特点,设计制造更加灵活和具有敏捷性的机器人。
通过仿真昆虫的感知机构、运动机制和智能行为,科学家们开发出了一系列昆虫仿生机器人,如模拟蚂蚁的行为模式的聚集式探索机器人、模仿蜜蜂的轨迹搜索算法的飞行器等。
这些仿生机器人在农业、环境监测、救援等领域有着广泛的应用前景。
案例四:植物仿生机器人植物仿生机器人是一种通过模仿植物的结构和生长机制,设计和制造的机器人。
仿生学及其在机器人控制领域应用案例剖析
仿生学及其在机器人控制领域应用案例剖析近年来,随着科技的快速发展和人工智能的兴起,机器人控制领域逐渐成为研究和技术创新的焦点之一。
而在机器人控制领域中,仿生学被广泛应用,为机器人的设计和控制提供了新的灵感和思路。
本文将通过剖析两个应用案例来探讨仿生学在机器人控制领域的具体应用。
案例一:鱼类仿生机器人的设计与控制鱼类拥有出色的水动力学性能,其高度灵活的运动能力和高效的推进方式成为仿生学研究的热点之一。
海洋生物中的鱼类运动方式受到广泛的模仿和研究,以期将其运动形态和技术应用于机器人控制领域。
研究人员通过分析鱼类的运动方式和骨骼结构,设计出一种仿鱼类运动的水下机器人。
该机器人结合了机械控制、水动力学和控制算法等多种技术,能够高度灵活地在水下进行运动。
机器人的鱼类仿生设计包括了鱼鳍、尾鳍和身体的形状和结构,使其能够在水中具有类似鱼类的运动能力和稳定性。
在机器人控制方面,研究人员通过传感器获取机器人在水中的运动和环境信息,并通过控制算法进行数据处理和运动控制。
通过仿真实验和实际测试,研究人员验证了仿生机器人的水动力学性能和运动效果。
仿生机器人在水下进行各种任务,如水下勘探、海底维修等,展现了其在机器人控制领域中的广泛应用前景。
案例二:昆虫仿生机器人的设计与控制昆虫拥有令人叹为观止的机械结构和感知能力,其高度适应各种复杂环境的特点成为仿生学研究中的重要对象。
昆虫仿生机器人的设计与控制将昆虫的解剖结构和行为特征与机械工程相结合,为机器人的运动和感知提供了新的思路。
研究人员通过分析昆虫的外形结构和运动方式,设计出一种仿生昆虫机器人。
该机器人模仿了昆虫的身体革检、触觉和视觉感知等特性,并通过传感器和控制系统实现对机器人的控制。
仿生机器人能够模拟昆虫的行走、飞行和感知动作,具备昆虫在不同环境中的适应能力。
在机器人控制方面,研究人员通过跟踪昆虫的运动和感知行为,开发出一种适应机器人的控制算法。
通过对机器人的实时运动和环境感知进行控制,仿生机器人能够自主完成多种任务,如环境监测、信息收集等。
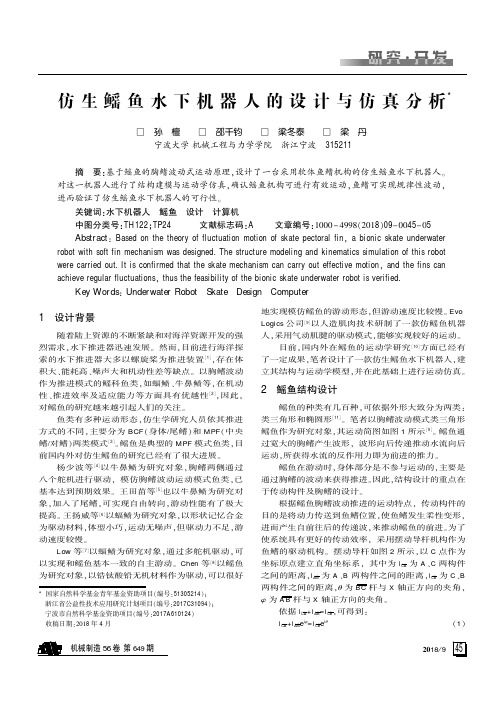
仿生鳐鱼水下机器人的设计与仿真分析
渊1冤
机械制造 56 卷 第 649 期
圆园18 辕 9 45
研 究·开 发
银图 1 鳐鱼运动简图
将式渊1冤展开袁并按照等式两边实部与虚部分别相
等的原则袁可得到院
lCA+lABcos 渍=lCBcos 兹
渊2冤
lABsin 渍=lCBsin 兹
渊3冤
由式渊2冤尧式渊3冤可得到院
tan
兹=
lABsin 渍 lCA+lABcos
achieve regular fluctuations袁 thus the feasibility of the bionic skate underwater robot is verified.
Key Words院 Underwater Robot Skate Design Computer
1 设计背景
地实现模仿鳐鱼的游动形态袁但游动速度比较慢遥 Evo Logics 公司咱9暂以人造肌肉技术研制了一款仿鳐鱼机器 人袁用气动肌腱的驱动模式袁能够实现较好的运动遥
目前袁国内外在鳐鱼的运动学研究咱10暂方面已经有 了一定成果袁笔者设计了一款仿生鳐鱼水下机器人袁建 立其结构与运动学模型袁并在此基础上进行运动仿真遥
渍
渊4冤
对式渊4冤进行求导袁可得到院
d兹 dt
=
棕AB咱浊cos渊棕ABt冤+1暂 浊2+2浊cos渊棕ABt冤+1
渊5冤
式中院浊=
lCA lAB
曰棕AB 为 A B 杆的角速度遥
从图 2 及式渊5冤可以得到院当 BC 杆运动到上下极
限位时袁速度最小袁机构的传动效率最高曰当 BC 杆运
动到中间位置时袁速度最大袁传动效率最低遥
仿生机器人介绍

搜救行动
仿生机器人能够模仿搜救 犬的行为,在废墟中寻找 被困人员,提高搜救效率。
物资运输
仿生机器人可以承担物资 运输任务,将救援物资快 速送达灾区,保障救援行 动的顺利进行。
科学探索
环长期监测,为生态 保护和科学研究提供数据支持。
生物研究
仿生机器人可用于研究生物行为和 生态系统的相互作用,揭示生物奥 秘。
移动速度和灵活性。
仿生机器人在人工智能领域的应用
智能控制
仿生机器人可以应用于智能控制 领域,通过模拟生物体的行为和 决策过程,实现更高效和智能的 控制算法。
机器学习
仿生机器人可以作为机器学习的 模型,通过模拟生物体的学习和 进化过程,提高机器学习的效率 和准确性。
虚拟现实
仿生机器人可以应用于虚拟现实 领域,通过模拟生物体的感知和 行为,提高虚拟环境的真实感和 沉浸感。
仿生机器人介绍
• 引言 • 仿生机器人的种类 • 仿生机器人的应用领域 • 仿生机器人的技术实现 • 仿生机器人的未来展望
目录
01
引言
仿生机器人的定义
总结词
仿生机器人是一种模仿生物形态 、运动方式以及感知能力的机器 人。
详细描述
仿生机器人不仅在外形上模仿生 物,还借鉴了生物的感知、运动 和行为模式,以实现更高效、灵 活和自主的运动能力。
THANKS
鱼类仿生机器人以鱼类为原型,具有高速游动、灵活转向、低阻航行等特点。
详细描述
鱼类仿生机器人通常采用流线型设计,利用水动力学原理,模拟鱼类的游动方式 和行为特征,如摆尾、转弯、加速等。它们在水下探测、海洋资源开发、水下救 援等领域具有广泛的应用前景。
鸟类仿生机器人
总结词
鸟类仿生机器人以鸟类为原型,具有飞行高度高、速度快、机动性强等特点。
仿生蝠鲼机器人的设计及仿真
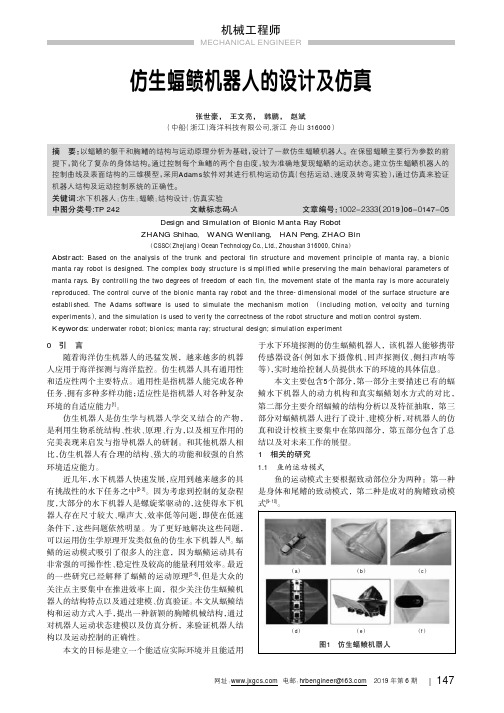
仿生蝠鲼机器人的设计及仿真张世豪,王文亮,韩鹏,赵斌(中船(浙江)海洋科技有限公司,浙江舟山316000)摘要:以蝠鲼的躯干和胸鳍的结构与运动原理分析为基础,设计了一款仿生蝠鲼机器人。
在保留蝠鲼主要行为参数的前提下,简化了复杂的身体结构。
通过控制每个鱼鳍的两个自由度,较为准确地复现蝠鲼的运动状态。
建立仿生蝠鲼机器人的控制曲线及表面结构的三维模型,采用Adams软件对其进行机构运动仿真(包括运动、速度及转弯实验),通过仿真来验证机器人结构及运动控制系统的正确性。
关键词:水下机器人;仿生;蝠鲼;结构设计;仿真实验中图分类号:TP242文献标志码:A文章编号:1002-2333(2019)06-0147-05Design and Simulation of Bionic Manta Ray RobotZHANG Shihao,WANG Wenliang,HAN Peng,ZHAO Bin(CSSC(Zhejiang)Ocean Technology Co.,Ltd.,Zhoushan316000,China)Abstract:Based on the analysis of the trunk and pectoral fin structure and movement principle of manta ray,a bionic manta ray robot is designed.The complex body structure is simplified while preserving the main behavioral parameters of manta rays.By controlling the two degrees of freedom of each fin,the movement state of the manta ray is more accurately reproduced.The control curve of the bionic manta ray robot and the three-dimensional model of the surface structure are established.The Adams software is used to simulate the mechanism motion(including motion,velocity and turning experiments),and the simulation is used to verify the correctness of the robot structure and motion control system. Keywords:underwater robot;bionics;manta ray;structural design;simulation experiment0引言随着海洋仿生机器人的迅猛发展,越来越多的机器人应用于海洋探测与海洋监控。
灵感来自海滩上的弹涂鱼
灵感来自海滩上的弹涂鱼作者:陈彦希王佳佳来源:《大学生》2024年第05期退潮时,厦门的沙坡尾海滩上常常可以看到一些黑乎乎的、爬来爬去,还不停跳跃的鱼,那就是弹涂鱼。
弹涂鱼不仅可以在岸上爬,还能在水里游,这种两栖的特点吸引了厦门大学海洋与地球学院的张宇教授,并让他产生了发明“两栖机器人”的想法。
经过长时间设计研发,这一想法终于成真。
不久前,张宇团队及其合作者研发的“仿生弹涂鱼两栖机器人(MIARF)”终于亮相。
实地测试证明,该机器人能够根据水陆两种不同的运动环境,采用不同的运动模式——通过胸鳍-尾鳍的协调作用,实现陆地及水下复杂环境中的高能量效率与高机动性。
近日,相关成果发表于Cell旗下期刊《CellReportsPhysicalScience》。
专门研究鱼的团队实际上,这不是张宇团队第一次研究仿生机器鱼了。
在此之前,团队就曾开展过许多关于仿生鱼的研究——仿生鲨鱼、仿生刀鱼、仿生金枪鱼、仿生水母为什么要研究仿生鱼?海洋约占地球表面积的71%,但对于人类来说,约95%的海洋是未知的。
因此,认识海洋、探测海洋成为一个迫切的问题。
而仿生机器人作为认识和探测海洋的前沿载体技术,起着重要作用。
相比起人,机器人更适合在复杂和缺氧的水下环境进行大量探测。
传统的工业机器人一般通过螺旋桨驱动或空轮式驱动,机动性较差,在狭小的空间内,传统工业机器人无法有效工作。
而真实的生物,比如鱼类,可以在远小于自身身体大小的空间里有效转向,这对于研究在复杂空间内作业的仿生机器人有重要借鉴意义。
两栖机器人既能入水,又可上地,灵活适应环境,能够完成需要跨介质的环境监测、搜索救援等工作。
但由于技术原因,大部分的两栖机器人难以实现有效的两极切换,且尺寸笨重、噪声较大、运动效率低下、隐蔽性不强。
于是,张宇团队基于弹涂鱼的生物灵感,设计了一款具有较高运动效率和环境适应性的机器鱼。
仿生弹涂鱼,银奖!这项颇具创新点的课题,最早要追溯到2019年的一次比赛。
仿生机器人的设计与仿真分析
仿生机器人的设计与仿真分析随着人工智能和机器人技术的不断发展,仿生机器人逐渐成为了研究和应用的热点。
仿生机器人是基于仿生学原理设计和制造的机器人,它能够模拟动物的外部形态、生理功能和行为方式,具有更高的适应性和智能性。
本文将探讨仿生机器人的设计与仿真分析。
一、仿生机器人的设计原理仿生机器人的设计灵感来源于生物,通过模仿生物结构和行为来实现机器人的自主运动和智能控制。
具体来说,仿生机器人的设计原理包括以下几个方面:1、结构仿生:仿生机器人的结构要模仿生物的外形、组织和器官结构。
例如,模仿鱼类的身体结构和鳍,可以实现机器鱼的自主游动;模仿昆虫的腿部结构和步态,可以实现机器人的爬行和行走。
2、功能仿生:仿生机器人的功能要模仿生物的生理机能和感知能力。
例如,模仿人眼的视觉系统,可以实现机器人的视觉感知和图像识别;模仿人耳的听觉系统,可以实现机器人的听觉感知和声音识别。
3、行为仿生:仿生机器人的行为要模仿生物的行为方式和智能控制。
例如,模仿昆虫的群集行为,可以实现机器人的协作和集群智能;模仿动物的学习和适应能力,可以实现机器人的自我学习和自适应。
二、仿生机器人的系统框架仿生机器人的系统框架包括机械结构、传感器、控制器和能源系统四个核心部分。
其中,机械结构是仿生机器人最基本的组成部分,它决定了机器人的外形、运动方式和力学性能;传感器是仿生机器人感知能力的关键,它可以采集机器人周围环境的信息,形成机器人的感知图像和数据;控制器是仿生机器人智能控制的核心,它可以根据传感器采集的信息,通过算法控制机器人的运动、姿态和动作;能源系统是仿生机器人的能量来源,它可以提供机器人的动力和供能,保证机器人的稳定运行。
三、仿生机器人的设计流程仿生机器人的设计流程包括机械设计、传感器设计、控制算法设计和仿真分析四个环节。
其中,机械设计是仿生机器人的基础环节,它涉及到机器人的外形、构造和机动性能。
机械设计可以采用CAD设计软件进行建模和分析,包括机械结构的三维建模、力学分析、运动仿真和结构优化等。
实验四 机器人运动仿真
实验四机器人运动仿真在当今科技飞速发展的时代,机器人技术日益成熟,机器人运动仿真成为了研究和开发机器人系统的重要手段。
通过对机器人运动的仿真,可以在实际制造和部署之前,对机器人的性能、行为和任务完成能力进行评估和优化,从而降低成本、提高效率,并减少潜在的风险。
机器人运动仿真是基于计算机技术和数学模型,模拟机器人在不同环境和任务中的运动情况。
它涉及到多个学科领域的知识,如机械工程、控制工程、计算机科学和数学等。
首先,要进行机器人运动仿真,需要建立机器人的数学模型。
这包括对机器人的几何结构、关节类型和运动范围等进行精确的描述。
常见的机器人模型有串联机器人和并联机器人。
串联机器人由一系列依次连接的关节和连杆组成,其运动学分析相对较为复杂;而并联机器人则具有多个并行的运动链,具有较高的刚度和精度。
在建立数学模型之后,需要选择合适的仿真软件或工具。
市面上有许多专业的机器人仿真软件,如 RobotStudio、MATLAB Robotics Toolbox 等。
这些软件提供了丰富的功能和接口,可以方便地进行机器人的建模、编程和仿真分析。
以一个简单的工业机器人为例,假设它需要在生产线上完成物料搬运的任务。
在仿真过程中,我们需要设定机器人的起始位置、目标位置以及运动路径。
通过输入相关的参数,如关节速度、加速度和运动时间等,软件可以计算出机器人的运动轨迹,并以直观的方式展示出来。
在仿真过程中,还可以对机器人与环境的交互进行模拟。
例如,考虑机器人在搬运物料时与周围设备、障碍物的碰撞情况。
通过碰撞检测算法,可以及时发现潜在的碰撞风险,并对机器人的运动路径进行调整和优化,以确保其安全可靠地完成任务。
此外,机器人的控制系统也是仿真的重要组成部分。
控制系统决定了机器人如何响应输入指令,并实现精确的运动控制。
在仿真中,可以对不同的控制算法进行测试和比较,如 PID 控制、模糊控制和自适应控制等,以选择最适合实际应用的控制策略。
仿生机器鱼三维仿真分析

仿生机器鱼三维仿真分析仿生机器鱼是一种模仿鱼类身体结构和游动方式的机器人,它具有良好的机动性和适应性。
在实际应用中,仿生机器鱼可以用于水下勘察、水下探测和水下救援等任务。
为了提高仿生机器鱼的性能,需要进行三维仿真分析,以评估其运动性能和机械结构的稳定性。
首先,三维仿真分析可以用来研究仿生机器鱼的游动方式。
通过建立仿真模型,可以模拟仿生机器鱼在水中的游动轨迹和姿态变化。
通过对仿真结果进行分析,可以确定最佳的游动策略和运动控制算法,以提高机器鱼的运动效率和稳定性。
其次,三维仿真分析可以用来研究仿生机器鱼的机械结构。
通过建立仿真模型,可以对机器鱼的鱼体结构和鱼尾运动机构进行分析。
通过对仿真结果进行分析,可以确定最佳的机械结构设计,以提高机器鱼的机动性和适应性。
在进行仿真分析时,需要考虑以下几个关键因素:1.流体动力学模拟:仿真模型应该能够准确地模拟水的流动和水与机器鱼之间的相互作用。
可以使用计算流体动力学(CFD)方法来模拟水的流动,以及根据流体动力学模拟结果对机器鱼的运动进行分析。
2.运动控制模拟:仿真模型应该能够模拟机器鱼的运动控制算法,以及根据运动控制模拟结果对机器鱼的运动行为进行分析。
可以使用动力学模拟方法来模拟机器鱼的运动控制算法。
3.结构强度分析:仿真模型应该能够模拟机器鱼在水中的受力情况,以及对机器鱼的机械结构进行强度分析。
可以使用有限元分析(FEA)方法来模拟机器鱼的受力情况,以及对机械结构的强度进行分析。
通过三维仿真分析,可以评估仿生机器鱼的运动性能和机械结构的稳定性,为进一步优化设计提供参考。
同时,仿生机器鱼的仿真模型也可以用于测试新的运动策略和结构设计,以提高机器鱼的性能和适应性。
总之,三维仿真分析是研究仿生机器鱼的运动性能和机械结构稳定性的重要手段。
通过建立仿真模型,可以模拟机器鱼的游动方式和机械结构,对其进行分析和评估,为优化设计提供参考。
仿生机器鱼的仿真分析结果可以用于改进机器鱼的运动控制算法和机械结构设计,以提高其性能和适应性。
仿生机器鱼三维仿真分析

学校代码:11517学号:0708071012HENAN INSTITUTE OF ENGINEERING毕业设计题目仿生机器鱼三维仿真分析学生姓名刘欢乐专业班级机械设计制造及自动化0701学号0708071012系(部)机械工程系指导教师(职称) 王新莉(教授)孟凯(助教)完成时间 2011年5月25日河南工程学院论文版权使用授权书本人完全了解河南工程学院关于收集、保存、使用学位论文的规定,同意如下各项内容:按照学校要求提交论文的印刷本和电子版本;学校有权保存论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存论文;学校有权提供目录检索以及提供本论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版;在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。
论文作者签名:年月日河南工程学院毕业设计(论文)原创性声明本人郑重声明:所呈交的论文,是本人在指导教师指导下,进行研究工作所取得的成果。
除文中已经注明引用的内容外,本论文的研究成果不包含任何他人创作的、已公开发表或者没有公开发表的作品的内容。
对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确方式标明。
本学位论文原创性声明的法律责任由本人承担。
论文作者签名:年月日河南工程学院毕业设计(论文)任务书题目仿生机器鱼三维仿真分析专业机械设计制造及自动化学号0708071012姓名刘欢乐主要内容、基本要求、主要参考资料等:选题背景:鱼形机器人不仅可以用于水下考古、水中摄影、探查狭窄水道、测绘海底地形地貌,还可进行水中养殖和捕捞,并作为水下微小型运载工具,在抢险搜救等工作中发挥重要作用。
主要内容:设计一款机器鱼的执行机构,对设计的机构进行三维仿真研究。
基本要求:建立三维模型,进行仿真研究,完成实物制作,提交设计说明书等设计相关资料。
主要参考资料:机电一体化系统设计传感器技术机器人技术机构设计相关科研论文10篇完成期限:指导教师签名:专业负责人签名:年月日目录摘要 (I)ABSTRACT (II)1 引言 (1)1.1 本文研究的目的及意义 (3)1.2 国内外研究现状 (4)1.2.1 国内研究现状 (4)1.2.2 国外研究现状 (6)1.3 论文的主要研究内容 (8)2 仿生机器鱼的机构设计概况 (9)2.1 仿生机器鱼的机构 (9)2.2 舵机设置 (10)3 仿生机器鱼的三维建模与运动分析 (12)3.1 建模软件的选取 (12)3.2 仿生机器鱼的三维实体建模 (13)3.2.1 仿生机器鱼鱼头和鱼尾的三维建模 (14)3.2.2 仿生机器鱼鱼身的三维建模 (15)3.2.3 虚拟装配 (17)3.3 仿生机器鱼的运动分析 (17)4 仿生机器鱼的三维仿真实现 (19)4.1 仿生机器鱼三维仿真的简介 (19)4.2 仿生机器鱼三维仿真 (20)结论与展望 (25)毕业设计工作总结 (27)致谢 (28)参考文献 (29)仿生机器鱼三维仿真分析摘要本文首先对小型鱼类现有的研究进行了描述,表明了鱼类在水下的优势对仿生机器鱼的研究发展将起到重要作用。
新型两栖仿生机器人的结构设计和运动学仿真
新型两栖仿生机器人的结构设计和运动学仿真
刘强;周涛;肖梦;周俊宝
【期刊名称】《舰船科学技术》
【年(卷),期】2024(46)10
【摘要】两栖环境是一种多介质结合的复杂地形环境,普通的两栖仿生机器人因为其自身设计结构简单且可实现动作单一等问题,导致很难完成特殊复杂的任务。
本文参考蝾螈生物模型,提出了一种新型两栖仿生机器人的设计方案。
同时结合蝾螈在水中的运动情况,设计俯仰姿态控制系统,使得其可实现上浮、下潜、上仰以及下俯等动作。
为了验证所设计方案的可行性,利用Solidworks对关键模块进行有限元分析,来验证特殊情况下材料强度和设计结构的合理性,同时采用Webots运动学仿真的方式对两栖仿生机器人各关节角度进行校验。
最终得出该两栖仿生机器人设计方案布局结构合理,整机在两栖环境中动作流畅,具有较好环境适应性和高拟真率,为整机的研发和应用奠定了基础。
【总页数】6页(P92-97)
【作者】刘强;周涛;肖梦;周俊宝
【作者单位】江苏海洋大学电子工程学院
【正文语种】中文
【中图分类】U662
【相关文献】
1.仿生四足机器人结构设计与运动学分析
2.两栖机器人结构设计及运动学建模
3.一种新型的仿生机械手结构设计与运动学仿真
4.一种新型7自由度上肢康复外骨骼机器人的结构设计和运动学仿真
5.一种桨身融合蛇形两栖子母机器人的机构设计和运动学仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
水下机器人动力学模型研究与仿真

水下机器人动力学模型研究与仿真随着科技的不断进步和人类对于深海和极地的探索,水下机器人的应用越来越广泛,涉及到海洋资源开发、环境监测和军事活动等领域。
与此同时,水下机器人动力学模型研究也越来越重要。
本文将简要介绍水下机器人动力学模型及其仿真,并对其研究内容进行探究。
一、水下机器人的动力学模型水下机器人的动力学模型是描述机器人在不同条件下的运动规律和力学性能的理论模型。
它是水下机器人研究的基础,具有重要的理论和实践价值。
水下机器人的运动涉及到机械结构、电子控制系统、液压系统、水动力学和水下环境等多个方面,因此,动力学模型也是一个复杂的系统。
水下机器人动力学模型的建立主要包括以下几方面内容:1、机器人的动力学分析机器人的动力学分析主要研究机器人在运动中的力学性能,包括机器人的运动学、力学和动力学等方面。
这是分析机器人运动规律的基础。
2、机器人姿态的建立机器人姿态的建立是指对机器人位置和姿态的准确描述和表达,它是机器人动力学模型的重要组成部分。
机器人姿态的描述一般采用欧拉角或四元数表示,可以根据机器人的传感器数据推算出来。
3、水动力学分析水动力学分析是机器人运动的基础,主要研究机器人在水下环境中的受力情况和流体动力学特性。
涉及到机器人的水阻力、浮力、舵效应等方面。
4、控制系统建模控制系统建模是将机器人的动力学建模与控制系统建模相结合,建立机器人整体的动力学模型。
包括力控系统、动力控制系统和运动控制系统等。
二、水下机器人动力学模型的仿真水下机器人动力学模型的仿真是对实际机器人性能进行模拟和预测的有效手段。
它可以节省时间和成本,提高研究效率和可靠性。
水下机器人动力学模型的仿真可以分类为离线仿真和在线仿真两种。
1、离线仿真离线仿真是指在计算机上模拟机器人的运动规律,分析机器人在不同条件下的性能和运动规律。
离线仿真一般都是在水下环境的三维模型上进行,通过动画和图表等多种方式来呈现仿真结果。
这种仿真方式适用于机器人设计、性能分析和控制算法优化等方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。