基于RTWEC的控制算法自动代码生成技术(1)
代码自动生成,让c语言无需手写(二)2024

代码自动生成,让c语言无需手写(二)引言概述:
代码自动生成是一种能够使C语言开发者无需手动编写代码的技术。
通过这种技术,开发者可以节省大量的时间和精力,提高代码编写的效率。
在上一篇文章中,我们介绍了代码自动生成的基本概念和原理。
在本文中,我们将继续探讨代码自动生成的相关内容,包括自动生成的方法和技巧。
正文:
一、预处理器的使用
1.1 使用预处理器宏定义简化常用代码块
1.2 使用预处理器的条件编译简化代码的适配和调试
1.3 利用预处理器的宏定义生成重复的代码,优化代码的可读性
二、模板的应用
2.1 利用模板生成通用的函数和类
2.2 使用模板库生成数据结构和算法
2.3 利用模板进行代码的复用和扩展
三、代码生成工具的使用
3.1 使用代码生成工具自动生成函数声明和定义
3.2 利用代码生成工具快速生成数据结构的操作函数
3.3 使用代码生成工具自动生成测试代码和文档
四、脚本的批量处理
4.1 使用脚本自动生成代码的目录结构和文件
4.2 利用脚本生成基于模板的代码文件
4.3 使用脚本处理代码的格式和风格统一
五、自动化测试和代码检查工具的应用
5.1 使用自动化测试工具自动生成测试用例
5.2 利用代码检查工具自动生成代码中的错误和潜在问题
5.3 使用覆盖率检查工具自动生成测试覆盖率报告
总结:
通过代码自动生成技术的应用,开发者可以大幅度提高代码编写的效率,减少手动编写代码的工作量,同时也可以减少人为错误的发生。
代码自动生成不仅适用于C语言,也可以应用于其他编程语言。
随着自动化技术的不断发展,代码自动生成将在软件开发过程中扮演越来越重要的角色。
基于 RTW 的驱动代码快速生成技术研究
基于 RTW 的驱动代码快速生成技术研究冯辉宗;朱澎;蒋建春【摘要】Although the model-based design technique is gradually substituting the text specification-based traditional embedded softwarede-velopment pattern,but at present,RTW code generation tool only transforms the control algorithm model into model source code.As to the de-velopment of real-time system,users have to program driver code for target chip,then append to model source code of control algorithm.In view of the above questions,we put forward the RTW-based driver code quick generation technique,which can effectively realise to embed the driver program to source codes of control model while generating code,thus realises truly the automatic code generation from simulation model to applications of target chips.In end of the paper we use the code generation of mainstream chip MPC5634 of automotive electronics as in-stance,results have verified the practicality and efficiency of the technique.%要虽然基于模型的设计逐步取代基于文本规范的传统的嵌入式软件开发模式,但是目前 RTW(Real-Time Workshop)代码生成工具仅仅将控制算法模型自动转换为源代码,对于实时系统的开发来说,目标芯片的驱动代码还需要用户手动编写,然后添加到控制算法的模型源代码中。
代码自动生成,让c语言无需手写(一)2024

代码自动生成,让c语言无需手写(一)引言概述代码自动生成是一种通过使用特定的工具或技术,以简化和加速软件开发过程的方式。
它可以帮助程序员减少手工编写代码的工作量,提高开发效率,并减少潜在的错误。
本文将介绍如何使用代码自动生成技术,使得C语言的编写过程更加轻松和高效。
通过自动生成代码,程序员将能够充分利用现有的资源和模板,同时保持代码的一致性和可维护性。
正文内容1. 代码自动生成工具概述- 代码自动生成是什么- 常见的代码自动生成工具- 选择合适的代码自动生成工具的考虑因素2. 自动生成C语言代码的步骤- 分析需求和设计出基本框架- 定义模板和规则- 配置代码自动生成工具- 自动化生成代码- 手动修改和优化生成的代码3. 自动化生成C语言代码的技术和技巧- 宏和宏展开- 模板和填充- 配置文件和脚本- 内容生成器- 代码生成器4. 实际案例:使用代码自动生成工具生成C语言代码- 自动生成函数和变量声明- 自动生成数据结构和枚举- 自动生成文件和目录结构- 自动生成测试代码- 自动生成文档和注释5. 代码自动生成的优点和局限性- 提高开发效率和减少出错率的优点- 可能会导致代码质量下降的局限性- 需要考虑的潜在问题和挑战总结代码自动生成是一项强大而有用的技术,对于C语言的开发来说尤为重要。
通过合理使用代码自动生成工具和技术,程序员可以减少手工编写代码的工作量,提高开发效率,并确保代码的一致性和可维护性。
但是,代码自动生成并不是万能的,需要程序员在使用过程中谨慎权衡利弊,并注意潜在的问题和挑战。
综上所述,代码自动生成将使C语言的开发更加简单、高效和可靠。
基于模型设计自动代码生成操作指南
MBD指南性文件(全网独一份)基于模型设计的自动代码生成操作指南 MBD:基于模型的设计一、概述MBD是一种软件开发流程,Simulink建立的模型从早期验证,代码生成到后期的SIL/PIL等提供了全流程的快速开发工具链和品质保障措施。
不仅通过仿真可以进行早期设计的验证,还可以生成C,C++等代码直接应用于PC、MCU等平台,在嵌入式软件开发中发挥着重要作用。
本文将以Simulink模型生成嵌入式C代码为主体详细分析代码生成的应用技巧,并重点讲解代码生成过程的参数配置及优化。
二、适用范围本指南适用于汽车电装品及辅助测具的软件开发及维护,也适用于基于MATLAB/SImulink生成或者转换的软件开发。
三、缩写及定义3.1 缩写缩写 全名MBD Model Based DesignMIL Model in the loopSIL Software in the loop3.2 定义四、代码生成Simulink的 Coder generation工具箱提供了将模型转换为可优化的嵌入式C代码的功能。
Configuration Parameter工具可以对代码生成方法、格式等约束条件进行配置,从而使生成的代码具有高质量,高可读性,高优化的特点 在生成嵌入式代码时,至少需要完成三部分的配置:模型解算器,模型的系统文件目标,硬件实现规定。
4.1解算器打开 Simulink模型,进入 Configuration Parameter(快捷键Cml+E)对话框,如下图所示,选定 Solver:●必须设置项:①解算器类型:选择固定点解算器( Fixed-step);②解算器算法:选择离散方法( dis c rete);注:固定点解算器提供了多种算法,目前引用的嵌入式系统是非连续的(no c ontinuous states)。
③解算器步长:依据底层调度周期;注:解算器步长为整个模型提供了一个基础采样频率,被称为基采样率。
基于RTWEC的控制算法自动代码生成技术

第23卷第6期2008年6月航空动力学报Journal of Aerospace Pow erVol.23No.6J une 2008文章编号:100028055(2008)0621131204基于R TW EC 的控制算法自动代码生成技术陆 军,郭迎清,王斌正(西北工业大学动力与能源学院,西安710072)摘 要:研究基于实时工作间嵌入式代码生成器(Real 2time workshop embedded coder ,R TWEC )的航空发动机复杂控制算法自动生成可执行代码技术,介绍原理及其应用方法.针对某型航空发动机控制器多变量控制算法的手动编程和自动生成代码进行电子控制器半实物仿真并比较分析.结果说明该方法简单、易行,有效降低了程序编制、查错和调试的工作量,缩短了研制周期,可以广泛用于控制器复杂算法从设计仿真到具体实现的开发过程.关 键 词:航空、航天推进系统;航空发动机控制;复杂控制算法;自动代码生成;实时工作间嵌入式代码生成器(R TWEC );半实物仿真中图分类号:V23317 文献标识码:A收稿日期:2007206219;修订日期:2007209206基金项目:西北工业大学研究生创业种子基金作者简介:陆军(1981-),男,上海人,博士生,主要从事航空发动机控制与仿真.E 2mail :npu 2huoye @.Automatic code generation technology for control method based on RTWECL U J un ,GUO Y ing 2qing ,WAN G Bin 2zheng(School of Power and Energy ,Nort hwestern Polytechnical University ,Xi ’an 710072,China )Abstract :This paper analyzed automatic code generation technology for complex cont rol of aeroengine wit h real 2time workshop embedded coder (R TWEC ),and described t he p rinci 2ple and applied met hod.Automatically generated and manually programmed codes of an areoengine cont roller ’s multi 2variable control met hod were comparatively analyzed by Hard 2ware in 2t he 2loop simulation (HIL S )of elect ronic cont roller.The result s show t hat t his feasi 2ble technology could reduce t he workload of programming ,checking ,debugging ,and also shorten t he develop ment cycle ,so it can be widely used in t he develop ment process of con 2t roller ’s complex algorit hm f rom design and simulation to implementation.K ey w ords :aerospace p rop ulsion system ;aeroengine cont rol ;complex cont rol met hod ;automatic code generation ;real 2time workshop embedded coder (RTWEC );hardware in 2t he 2loop simulation 近年来,随着微电子技术的不断发展,全权限数字电子控制FAD EC 技术已是国内外航空发动机控制领域发展的必然趋势[122].由于航空发动机结构的高度复杂性以及对其性能要求的逐步提高,促使相应的控制算法,特别是多变量控制、故障诊断等[3]变得更加复杂.而对于复杂控制算法设计与仿真,目前多采用先进的设计仿真平台软件Matlab/Simulink [4],通过数字仿真验证后,再转化为电子控制器中可执行程序进行半实物仿真验证,这也是航空发动机控制系统研制过程中的关键一步,传统做法是需要将设计的控制算法手动转化为C 或其它语言,这就需要熟悉软件的编程人员,并使大量工作用在程序的编制、查错、调试、验证上面,明显增加工作量,延长研制周期;此航 空 动 力 学 报第23卷外,手动编制的代码良莠不齐,降低了软件运行的可靠度,提高了代码错误的风险性.在航空发动机控制领域里,电子控制器主要采用嵌入式系统来实现,那么其控制算法需以嵌入式代码格式编写、编译.因此,本文将主要研究基于嵌入式代码生成器的航空发动机复杂控制算法自动生成可执行代码技术,介绍其原理以及应用方法,通过实例对自动生成代码和手动编程进行比较分析,结果说明本文提出的自动代码生成方法简单、易行,有效降低了程序编制、查错和调试的工作量,缩短了研制周期,可以广泛用于控制器复杂算法从设计仿真到具体实现的开发过程.1 嵌入式代码自动生成简介[5]R TWEC是基于Matlab/Simulink的自动代码生成环境实时工作间(Real2time workshop, R TW)中一个独立的扩展模块.它能直接从Sim2 ulink模型中自动生成优化的、可移植的、自定义的产品级应用C代码,并根据目标配置自动生成高度嵌入式系统实时应用程序.典型自动生成嵌入式代码的核心框架为一个主循环程序,不断迭代执行着后台任务或空任务并检测终止条件,而核心任务即Simulink模型框图中真正实现部分的主体代码通过一个定时器周期性中断调用函数rt_OneStep来完成.其运行情况取决于模型是单采样率还是多采样率,下面的伪代码显示了在单采样率程序中的rt_OneStep 框架:void rt_OneStep(void){检查中断溢出或者其它错误;开启中断;模型单步执行;}由此我们可以看出,相比快速原型化类型代码而言,其框架结构十分简单,这也为程序移植提供了很大的便利性,不需要对其做很大修改就可直接调用.2 控制算法代码自动生成流程以LQ G/L TR多变量鲁棒控制算法[3](图1)为例,说明其从自动生成代码到平滑移植入电子控制器C语言程序的操作流程,如下所示:1)安装RTWEC V6.6:需要Matlab R2007a, Simulink V6.6,R TW V6.6,编译器推荐使用Visual C/C++ 6.0以上版本;2)在Simulink下将设计完成的算法模型进行离散化、反归一化等准备工作;3)简化该部分与其他模型的数据流接口,并使其转化为子模型;4)设置RTW参数选项:积分求解器为fixed2 step;目标系统文件为ert.tlc(Visual C/C++pro2 ject makefile only for RTWEC),语言为C;模板编联文件为ert_msvc.tmf;选中Single output/update function,使输出与更新函数合并在一起;选中Generate an example main program→BareBoard2 Example,既以此生成可执行程序,也可作为主程序框架参考;数据访问接口为None;其它为默认设置;5)通过R TW→Build Subsystem进行自动代码生成;6)移植控制算法代码:将相关函数、变量的声明与定义源代码文件包含进电子控制器程序工程;对初始化、执行函数进行相应调用;增加数据流接口代码部分.总体情况如以上步骤所述,不同设置会产生略微不同的代码,如优化参数选项、注释内容、内存设置、积分求解器、初始化方案等.图1 Simulink下L Q G/L TR控制算法模型图Fig.1 L Q G/L TR controller model in Simulink3 实时仿真验证为了确认自动生成代码的有效性,包括精确度、执行效率两方面,将在半实物仿真环境中与手动编写代码进行比较验证.3.1 硬件环境半实物仿真环境主要以PC104为核心的发动机电子控制器、以工控机为发动机仿真计算机的硬件框架结构组成闭环回路;其双机同步方式为外触发定时中断,由工控机向PC104触发,周期为25ms;A/D,D/A通道主要传递信号为:高2311 第6期陆 军等:基于R TWEC 的控制算法自动代码生成技术压转子转速N HC ,低压转子转速N LC ,高度H ,马赫数M a ,主供油量W FM ,加力供油量W FA ,尾喷口面积A 8;其结构如图2所示:图2 实时仿真系统实物结构图Fig.2 Hardware f rame with real 2timesimulation system3.2 软件环境仿真计算机中发动机模型程序为C ++语言,以Windows 为平台,并通过Visual C/C ++6.0平台编写监控界面;电子控制器为C 语言,以DOS 系统为平台.发动机电子控制器程序主要由控制规律、控制算法、输入输出、数据记录、错误检测等基本功能组成.在其它功能保持不变的情况下,以控制算法部分代码为主,将在Matlab/Simulink 下设计出来的L Q G/L TR 多变量鲁棒控制算法,分别通过自动生成代码和手动编写代码进行编译、链接成电子控制器执行程序进行比较.3.3 仿真结果3.3.1 精确度情况在地面状态下,即高度H =0km ,马赫数M a =0,初始主供油量W FM =4500kg/h ,加力供油量W FA =0kg/h ,尾喷口面积A 8=0.2602m 2.仿真情况包括加减速、加力接通、切断、中间稳定等各种状态,工作路线如表1所示.仿真结果如图3所示,其中Y 轴为手动代码和自动代码情况下各自五组数据的参数百分比,即每组数据与该组最大值之比:低压转子转速N LC ,高压转子转速N HC ,尾喷管面积A 8,主供油量W FM ,涡轮落压比P 36,X 轴为时间刻度,以25ms 为执行周期,从图中无法区分各对应数据的参数变化,说明两者结果的一致性;再通过相对误差比较来确定其精确度,如图4所示,其中Y 轴为表1 控制系统仿真工作线路表T able 1 Work line of control system simulation时刻t /s油门杆角度P LA /(°)(情况)加力开启发动机运行状态070(加速并稳定)否最大3130(加力接通后加速)是最大加力680(减速并稳定)是小加力970(加力切断后减速)否最大1260(减速并稳定)否中间稳定两种情况下五组数据的相对误差,即每组误差与该组最大值之比,从图中可以看出,除了在3s 时刻左右,即加力接通并加速时刻,各参量有10-4级别误差之外,其他时刻几乎没有误差.对于存在的极小误差,通过分析代码可知,出现这种情况的原因是初始化方案的细微区别在运行状态转换时刻所引起的,但这类情况对于实际航空发动机电子控制器的要求可以忽略不计.由此,可以说明两种代码所执行结果的精确度是相同的.图3 两种情况下各参数变化曲线图Fig.3 Parameters variety in twoways图4 两种情况下各参数精确度比较曲线图Fig.4 Compare with parameters variety in two ways3311航 空 动 力 学 报第23卷3.3.2 执行效率情况一般情况下,在DOS 系统中TIM ER 类中断函数只能精确到54ms 级别,而此控制算法实际运行在更小级别,主要视硬件配置不同而不同,因此这类方法无法对执行代码进行精确计时,除非对系统上的8253计时器重新编程,但实现难度较大[6].由此,次选方案是在Windows 平台下运行比较,通过调用QueryPerformanceFrequency ()和QueryPerformanceCounter ()函数来实现精确计时[7],其计时级别为1μs 级别,测试PC 机主要硬件配置为双核3.4G CPU.执行结果如图5和图6所示,自动代码平均执行时间为2.0020×10-6s ,手动代码为1.4619×10-6s ,平均差值为5.4013×10-7s ,自动代码高于手动代码36.95%,显然前者比后者的执行时间要长,其原因在于自动生成代码偏重于编程规范性以及兼容性要求,部分实现方式也有所不同,则相对于精简的手动代码损失了一定的执行效率,但该结果是满足实际要求的.图5 两种情况下执行时间曲线图Fig.5 Runtime in twoways图6 两种情况下执行时间比较曲线图Fig.6 Compare with runtime in two ways4 结 论研究了针对航空发动机复杂控制算法的自动可执行代码生成技术,通过半实物仿真对手动代码与自动生成代码进行了比较分析:①在精确度方面,两者几乎没有误差,完全满足要求;②在执行效率方面,后者略低于前者,按实际需要是可以接受的.这些结果基本源自两种代码在实现思想上保持一致,而具体实现上有所区别.此外,从开发时间上考虑,后者明显快于前者,而且其规范的代码开发,即满足航空机载软件开发标准:DO 2178B ,为后期软件可靠性验证奠定了坚实基础[8].总之,该方法可以广泛应用于控制算法从设计仿真到具体实现的开发过程,具有简单、易行、有效等特点,让控制工程师从繁琐的软件编制任务中解脱出来,而专心于控制系统的设计工作.参考文献:[1] Robert J M J A F gas turbine trends into t he nextcentury[R ].ISABE 29727157,1997.[2] 张绍基.航空发动机控制系统的研发与展望[J ].航空动力学报,2004,19(3):3752382.ZHAN G Shaoji.A review of aeroengine control system [J ].Journal of Aerospace Power ,2004,19(3):3752382.[3] 王永庭,郭迎清,王海泉.航空发动机非完全恢复的L Q G/L TR 控制系统设计[J ].航空动力学报,2007,22(3):4852489.WAN G Y ongting ,GUO Y ingqing ,WAN G Haiquan.De 2sign of non 2fully recover LQ G/L TR cont rol system of aeroengine [J ].Journal of Aerospace Power ,2007,22(3):4852489.[4] Rabbat h C A ,Bensoudane E.Real 2time modeling andsimulation of a gas 2turbine engine control system [R ].AIAA 200124246,2001.[5] 杨涤,李立涛,杨旭,等.系统实时仿真开发环境与应用[M ].北京:清华大学出版社,2002.[6] Michael Abrash.图形程序开发人员指南[M ].北京:机械工业出版社,1997.Michael Abrash.Graphics programming black book [M ].Beijing :China Machine Press ,1997.[7] 郭占社,孟永钢,苏才钧,等.基于Windows 的精确定时技术及其在工程中的应用[J ].哈尔滨工业大学学报,2005,(12):171721720.GUO Zhanshe ,MEN G Y onggang ,SU Caijun ,et al.Windows based precise timing technology and it s engi 2neering applications [J ].Journal of Harbin Institute of Technology ,2005,(12):171721720.[8] 李同泽.机载软件合格审定的方法[J ].航空标准化与质量,1996,(06):32233.L I Tongze.A met hod for certification of airborne software [J ].Aeronautic Standardization &Quality ,1996,(06):32233.4311。
3用RTW实现VxWorks系统下的代码自动生成
第7卷 第14期 2007年7月1671-1819(2007)14-3580-05科 学 技 术 与 工 程Sc i ence T echno logy and Eng i neer i ngV o l 7 N o 14 July20072007 Sci T ech Engng.用RT W实现Vx W orks系统下的代码自动生成王深石(西北工业大学软件学院,西安710065)摘 要 介绍了RT W生成的基于V x W o rks的实时程序的运行时框架结构。
并举例讲述了配置RTW与V x W orks的方法。
关键词 RTW V x W orks 实时程序中图法分类号 TP332 3; 文献标识码 ART W(Real-T i m e W orkshop,实时工作间)是MATLAB的重要组成部分,它作为M atlab和S i m ulink的扩展,使得系统实时仿真变得异常地快速简便。
传统的仿真总是在M atlab和S i m uli n k中先进行纯粹数字仿真,要想把仿真模型加载到实时目标设备上进行实时仿真,就必须自己将仿真模型改写成适合目标设备的代码,工作量很大;而M atl a b 的RTW工具箱可以简化过程。
Rea l-T i m e W o r ksho 可以从构建好的S i m ulink模型自动生成优化的、简洁的、可移植的标准ANSI C代码模型,而这个stand-a l o ne(独立运行)的C代码模型可以在各种各样实时的,或者非实时的软硬件目标环境中运行;可以在普通的PC 硬件平台上、DSP上、微控制器上(m icrocontro llers)和裸板(bare-board)上运行;也可以在W i n do w s、DOS、或者各种商用的、个人的实时操作系统(RTOS)上运行,例如XPC、Vx W or ks等。
1 实现的主要步骤使用RT W实现并运行基于Vx W orks的实时程序,用户必须完成下列步骤:根据应用情况设计S i m u li n k模型。
控制系统中的控制算法与算法设计

控制系统中的控制算法与算法设计控制系统是指通过对特定对象的输入信号进行调节和控制,以使对象按照预定要求进行运动或保持特定状态的系统。
而控制算法则是控制系统中的重要组成部分,它决定了系统如何根据测量信号和目标要求来产生控制信号。
本文将探讨控制系统中的控制算法,并重点关注算法设计的重要性。
一、控制系统中的控制算法概述控制算法是控制系统的核心。
它根据控制系统的要求和目标,通过对测量信号的处理和分析,以及经验法则的应用,生成相应的控制信号,从而实现对被控对象的控制。
控制算法的设计,既需要考虑控制效果,又需要考虑计算复杂度和实时性。
控制算法主要通过数学模型、传感器反馈和控制器的组合来实现。
常见的控制算法包括PID控制算法、模糊控制算法、遗传算法、最优控制算法等。
二、控制算法设计的重要性控制算法设计的好坏直接决定了控制系统的性能和稳定性。
一个优秀的控制算法能够快速、准确地响应系统的变化,并通过对控制信号的调节,使系统达到预期的控制效果。
在控制算法设计中,需要考虑以下几个方面:1. 系统的稳定性:控制算法要能确保系统的稳定性,避免系统出现不稳定、振荡或超调等问题。
2. 控制精度:控制算法要能保证系统输出与目标值的偏差尽可能小,以实现精确的控制。
3. 响应速度:控制算法要能够迅速地对系统的变化做出响应,以实现快速的控制。
4. 鲁棒性:控制算法要能适应不同的工作环境和参数变化,保持对外界干扰的抵抗能力。
5. 计算复杂度和实时性:控制算法需要根据实际应用场景,考虑计算资源的限制和实时性要求。
三、常见的控制算法1. PID控制算法PID控制算法是最常见的一种控制算法。
它通过比较目标值与实际值的误差,计算出比例、积分和微分三个控制量的加权和,从而产生控制信号。
PID控制算法具有简单实用、性能稳定的特点,在工业控制中得到广泛应用。
2. 模糊控制算法模糊控制算法是一种基于模糊逻辑的控制方法。
它通过模糊化输入信号和输出信号,建立模糊规则库,并通过模糊推理和解模糊化的方法,产生控制信号。
RTW嵌入式代码自动生成机制与代码结构分析

RTW嵌入式代码自动生成机制与代码结构分析
齐振恒;孙中杰;李涛
【期刊名称】《计算机测量与控制》
【年(卷),期】2010(018)003
【摘要】随着代码自动生成技术的发展,基于文本规范的传统嵌入式软件开发模式逐渐被基于模型的设计方法所取代,代码自动生成技术是基于模型的开发方法中一项核心技术,而MATLAB中RTW工具箱是代码自动生成最优秀的工具,首先对基于RTW的代码自动生成机制进行了分析,研究了VxWorks目标代码的结构及变量命名规则,并从程序实时运行机制方面进行了分析,方便用户对自动生成的代码进行二次开发;采用该技术进行VxWorks嵌入式软件开发,可大大提高开发效率.
【总页数】4页(P639-642)
【作者】齐振恒;孙中杰;李涛
【作者单位】国防科技大学,机电工程与自动化学院,湖南,长沙,410073;国防科技大学,机电工程与自动化学院,湖南,长沙,410073;国防科技大学,机电工程与自动化学院,湖南,长沙,410073
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于Matlab/RTW的单相桥式逆变器SPWM目标代码自动生成研究 [J], 胡文华;韦宝泉
2.基于RTW的2H桥逆变器SPWM目标代码自动生成 [J], 胡文华;孙驰;艾胜;刘春喜
3.基于MATLAB/RTW的车载无刷直流电机调速系统代码自动生成 [J], 吴志红;孙萌;毛明平
4.用RTW实现VxWorks系统下的代码自动生成 [J], 王深石
5.嵌入式接口通讯软件代码自动生成技术 [J], 赵昶宇;胡平
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于RTW的实时控制系统快速开发方法

ISSN 100020054CN 1122223 N 清华大学学报(自然科学版)J T singhua U niv (Sci &Tech ),2003年第43卷第7期2003,V o l .43,N o .79 378952898一种基于RT W 的实时控制系统快速开发方法樊晓丹, 孙应飞, 李衍达(清华大学自动化系,北京100084)收稿日期:2002206228基金项目:中国博士后科学基金项目作者简介:樊晓丹(19782),男(汉),湖南,硕士研究生。
通讯联系人:孙应飞,副教授,E 2m ail :sunyingfei @tsinghua .o rg .cn摘 要:针对控制系统的建模和仿真中Si m ulink 和V isual C ++(V C )不能直接互用、传统的设计阶段和实现阶段被断开的问题,该文通过利用实时代码生成工具箱(R TW )将Si m ulink 模块图自动转换为C 代码、经过少量改写和加入实时控制机制,提供了一种从Si m ulink 模块图平滑过渡到V C 集成开发环境的途径,从而实现了设计阶段和实现阶段的无缝连接,省去了在V C 中编写模型代码和仿真控制代码的繁琐工作,而且大大便利了系统的二次开发和整合。
该文给出了利用此方法开发系统的具体步骤和系统框架,并详细讨论了实时控制系统开发中的定时和资源分配问题。
关键词:自动控制;实时代码生成工具箱(R eal 2T i m e W o rk 2shop );半实物仿真;实时控制;快速开发;V isual C ++中图分类号:T P 273文献标识码:A文章编号:100020054(2003)0720895204Rap id develop m en t of rea l -ti m e con trolsystem s i n C ++ba sed on RT WFAN Xia oda n ,SUN Yingfe i ,L I Ya nda(D epart men t of Auto mation ,Tsi nghua Un iversity ,Be ij i ng 100084,Chi na )Abstract :Si m ulink is the best si m ulati on too l fo r the design of contro l system s,but it is no t effective fo r system realizati on because it is no t friendly used and is no t easily custom ized .V isual C ++is mo re useful fo r system realizati on,but the designers have to code the w ho le system in C ++after they have studied it using Si m ulink blocks .T his paper p resents a m ethod to easily translate Si m ulink blocks to C ++code fo r the w ho le system.T he si m ulati ons also include real 2ti m e contro l,so few changes are needed to transfer the p rogram into a real 2ti m e contro l system in V isual C.T he m ethod seam lessly links Si m ulink and V isual C;therefo re,the developm ent peri od is sho rtened greatly because there is no need to m anually code the Si m ulink block s .T he system is also helpful fo r softw aresecondary developm ent and system integrati on .T he ti m ing m ethod and resource allocati on are discussed in detail .Key words :autom atic contro l;real 2ti m e wo rk shop;hardw are 2in 2loop;real 2ti m e contro l;rap id developm ent;V isualC ++ 控制系统可以分成3个子系统:控制器、执行机构和被控对象。
ControlBase——基于全自动代码生成的ECU快速开发解决方案

ControlBase — 基于全自动代码生成的ECU快速开发解决方案“使用ControlBase可以缩短50%开发周期,降低80%开发成本。
”“ControlBase不仅是快速原型工具,还是全自动代码生成工具。
”“全自动代码生成技术可以削减80%的控制器软件开发工作量。
”控制器快速原型可以在没有控制器硬件的情况下,提前进行控制算法的开发与验证,尤其适合于新产品、新型号的开发研究,快速原型可以在一定程度上缩短开发周期,降低开发成本。
由于快速原型仅仅是对控制算法进行了验证,在控制器开发的整个过程中,除了开发控制算法以外,还需要开发硬件与各类基础软件(包括底层驱动、标定协议、引导加载程序、实时操作系统、通信协议栈等等),之后还需要将基础软件与应用软件(包括控制算法与诊断算法)进行手工集成,工作量巨大,过程漫长。
从整个开发过程的角度来看,快速原型所起的作用比较有限。
全自动代码生成在应用软件代码自动生成的基础上进一步发展,自动生成基础软件代码,从而实现整个控制器软件的自动代码生成,大幅削减控制器软件开发的工作量。
ControlBase提供了基于全自动代码生成的ECU快速开发解决方案。
当作为快速原型工具使用时,ControlBase为常用电控系统控制算法提供一个快速验证的平台,既可用于实验室测试也可用于装车试验。
当作为全自动代码生成工具使用时,ControlBase支持基础软件与应用软件的自动代码生成,削减了控制器软件开发的工作量。
作为产品级原型硬件,ControlBase为控制器硬件设计提供参考,降低硬件返工几率。
在控制器开发的整个过程中,使用ControlBase可以缩短开发周期,降低开发成本,提高控制器设计质量。
在控制器快速原型阶段,ControlBase适合于发动机ECU、自动变速器TCU、混合动力HCU、电动汽车VCU、防抱死制动系统ABS等常用汽车电控系统控制器的快速原型,为常用电控系统控制算法提供一个快速验证的平台,可以支持硬件在环测试、台架试验和实车试验。
ewc算法代码

ewc算法代码ewc算法是一种用于迭代优化问题的算法,其全称为Elastic Weight Consolidation,即弹性权重整合算法。
该算法的主要目的是在解决新任务时,保留前一任务的知识,避免遗忘。
下面将详细介绍ewc算法的原理和应用。
ewc算法的原理是基于正则化的方法,在解决连续学习任务时,通过约束权重的变化范围来保留先前任务的知识。
具体来说,ewc算法通过计算不同任务上权重的变化程度,将其作为正则化项加入目标函数,从而约束权重的变化。
这样一来,当学习新任务时,网络会更倾向于保留前一任务的权重,从而避免遗忘。
在ewc算法中,权重的变化程度通过计算权重的fisher信息矩阵来衡量。
具体来说,fisher信息矩阵衡量了参数对损失函数的影响程度,即参数对损失函数的二阶导数。
在ewc算法中,通过计算不同任务上的fisher信息矩阵,可以得到权重的变化程度。
然后,将权重的变化程度与先前任务的权重进行加权求和,得到最终的正则化项。
ewc算法的应用非常广泛,特别适用于解决连续学习任务。
在传统的机器学习算法中,通常会重新训练整个模型来适应新任务,这就会导致之前任务的知识被遗忘。
而ewc算法通过保留先前任务的知识,可以在学习新任务时避免遗忘。
这对于一些需要不断学习新知识的场景非常有用,比如机器人的连续学习、自动驾驶的迭代优化等。
除了连续学习任务,ewc算法还可以用于解决其他优化问题。
例如,在深度强化学习中,ewc算法可以用于解决非平稳环境下的优化问题。
在非平稳环境中,传统的强化学习算法往往会受到环境的改变而导致性能下降。
而ewc算法通过约束权重的变化范围,可以在非平稳环境中保持较好的性能。
ewc算法还可以应用于神经网络的剪枝和压缩等问题。
在神经网络中,通常会存在大量的冗余参数,这会导致模型的存储和计算开销较大。
而ewc算法可以通过正则化的方式,约束权重的变化范围,从而达到剪枝和压缩的效果。
这对于提高模型的存储和计算效率非常有帮助。
如何利用VC自动生成
如何利用VC自动生成随着科技的不断发展,越来越多的智能化工具开始进入我们的生活。
其中,VC(Virtual Copywriter)自动生成文章的工具越来越受到欢迎。
VC可以根据用户输入的关键词和需求,自动地生成具有逻辑清晰、结构合理、语言流畅的文章,大大节省了撰写文章的时间和精力。
首先,我们需要根据具体的关键词和需求确定文章的主题。
例如,如果我们要写一篇关于“如何提高免疫力”的文章,那么关键词就可以是“免疫力、健康、锻炼、饮食”等。
然后,我们需要选择一个适合的模板和格式,以便更好地呈现文章的内容。
接下来,我们就可以利用VC自动生成文章了。
对于每个关键词,VC 都会自动地生成一个独立的段落。
例如,对于“免疫力”这个关键词,VC可能会生成以下段落:“免疫力是指身体对疾病的抵抗力,可以通过锻炼和饮食等方式来提高。
”在这个段落中,不仅包含了关键词“免疫力”,还介绍了提高免疫力的方法和意义。
然后,我们可以将这些段落按照需要的顺序进行排版。
例如,我们可以将关于“免疫力”的段落放在文章开头,将关于“健康”的段落放在中间,将关于“锻炼”和“饮食”的段落放在结尾。
通过这种方式,我们可以轻松地完成一篇结构合理、逻辑清晰的文章。
总之,VC自动生成文章的工具可以帮助我们快速生成文章,提高工作效率。
我们也需要注意一些问题。
例如,VC生成的段落可能不够自然,有些表达可能不太符合中文的习惯。
因此,我们需要在VC生成的基础上,进行一些手动修改和调整,以确保文章的质量。
引言:随着现代技术的不断发展,越来越多的计算机软件开始采用自动化文档生成技术,以减轻人工编写文档的负担,提高工作效率。
其中,VC++是一种广泛使用的编程语言和开发工具,具有高度的可操作性和灵活性。
本文将探讨如何使用VC++自动生成Word文档,并介绍相关的关键技术和处理方法。
背景知识:VC++是一种由Microsoft开发的面向对象的编程语言和集成开发环境(IDE)。
基于RTW的C代码生成及其在汽车ECU开发中的应用

基于RTW的C代码生成及其在汽车ECU开发中的应用刘耀锋;邬昌盛
【期刊名称】《机电一体化》
【年(卷),期】2014(0)A03
【摘要】Real-time workshop(RTW)可将Matlab/Simulink中的图形化设计模块生成用户目标所需的C语言代码,极大地方便了汽车电子ECU的软件开发。
介绍了基于RTW的嵌入式C语言代码自动生成技术,分析RTW对微控制器的支持,代码效率的影响因素及代码优化方法,并进行代码的生成、移植和测试。
实例证明,RTW生成标准C语言代码的效率高,代码执行快,可读性强,适用于所有资源足够的8位微控制器。
【总页数】5页(P41-45)
【关键词】RTW代码生成;代码执行效率;代码优化;代码移植
【作者】刘耀锋;邬昌盛
【作者单位】同济大学新能源汽车工程中心
【正文语种】中文
【中图分类】TP311.11;TP391.41
【相关文献】
1.基于AUTOSAR规范的汽车ECU软件开发方法 [J], 刘玺斌;马建;宋青松
2.基于VC++的NC代码自动生成程序开发 [J], 康胜武;毛哲;乐利梁
3.NI软硬件平台在汽车ECU开发和测试中的应用 [J], 梁锐
4.基于IS014229协议的汽车ECU自动诊断测试平台开发 [J], 何默; 费毅杰; 孙竞因版权原因,仅展示原文概要,查看原文内容请购买。
基于Visual C++的工程计算书自动生成技术
基于Visual C++的工程计算书自动生成技术
钟崴;许跃敏
【期刊名称】《计算机工程与应用》
【年(卷),期】1999(035)012
【摘要】文章研究了面向对象的工程计算书的自动生成技术,分析了程序的设计模型,介绍了工程应用软件控制MicrosoftExcel填写表格计算书的方法。
这一技术可广泛应用于工程计算软件的开发,使软件的自动化水平得以进一步提高,具有重要的工程应用价值。
【总页数】3页(P36-38)
【作者】钟崴;许跃敏
【作者单位】浙江大学化工机械研究所;浙江大学化工机械研究所
【正文语种】中文
【中图分类】TB115
【相关文献】
1.基于Visual C+++Access钩住IlasⅡ现刊记到窗口实现排架区分号自动化生成技术 [J], 林维存
2.基于Visual C++的高速木材复合加工中心自动编程系统研究与实现 [J], 何俊杰;吴波;胡友民
3.基于VISUAL C++客户端程序自动更新的应用研究 [J], 朱建凯;郑洪源;丁秋林
4.基于Visual C++的光纤陀螺多参数自动化测试系统 [J], 赵亚飞;宋凝芳;杜士森;
蔡伟
5.基于Visual C++的自动化客户端的实现 [J], 刘涛
因版权原因,仅展示原文概要,查看原文内容请购买。
嵌入式软件模型化开发
嵌入式软件模型化开发随着现今社会的进步和发展,嵌入式系统开发经逐步面临着市场需求多样性与开发实现快速性之间的矛盾。
然而传统的嵌入式系统开发模式,从需求分析、设计、实现到测试的顺序开发过程中由于开发环节较多、中间文档较多,常导致各开发环节之间的衔接存在很大的不确定性和潜在的遗漏危机,一旦在最终实现和测试阶段出现了明显的错误或是需求不满足的情况,则无法进行跨越阶段的重复设计,只能从头开始设计和实现,这样将无法满足市场对产品开发周期的快速性需求,使嵌入式系统开发陷入设计瓶颈。
目前,依靠手工编程的设计流程已经很难胜任新的开发需求,而且通过手工编写的代码容易产生程序缺陷。
查找和解决这些问题不仅要花费大量的人力和时间,有时甚至会导致软件的重新开发。
特别是在对安全系数要求较高产品上,出现程序缺陷会直接关系到人身安全。
因此,近几年汽车电子行业的一些龙头企业已经通过代码自动生成的方法逐步取代了传统开发模式下的手工编程,收到了良好的效果[1],这就是模型化的嵌入式软件开发方法。
一、基于模型的设计方法1.1基于模型设计思想简介基于模型的设计(Model Based Design),就是在系统的设计过程之中,所有信息传递、工作的核心与基础都是若干模型,所有工程师都利用同一的模型完成自己关注的开发任务。
如今基于模型的设计思想已经被大家广泛的认可,基于模型的设计流程使用的是框图化开发环境,系统开发工程师在这个环境中构建嵌入式系统的可执行模型。
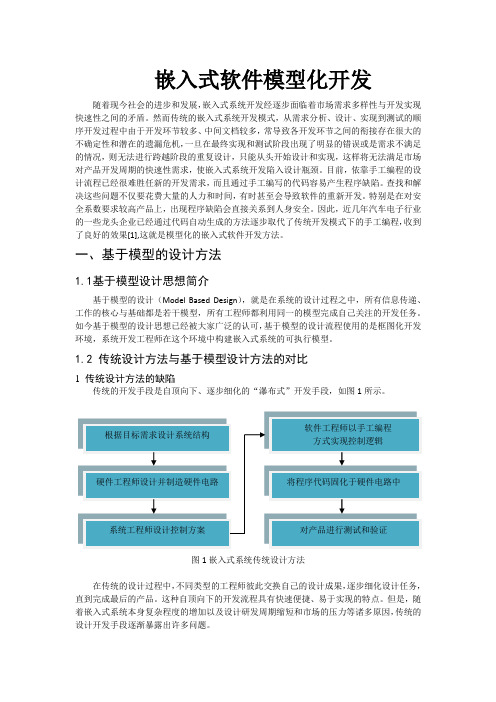
1.2 传统设计方法与基于模型设计方法的对比1 传统设计方法的缺陷传统的开发手段是自顶向下、逐步细化的“瀑布式”开发手段,如图1所示。
图1嵌入式系统传统设计方法在传统的设计过程中,不同类型的工程师彼此交换自己的设计成果,逐步细化设计任务,直到完成最后的产品。
这种自顶向下的开发流程具有快速便捷、易于实现的特点。
但是,随着嵌入式系统本身复杂程度的增加以及设计研发周期缩短和市场的压力等诸多原因,传统的设计开发手段逐渐暴露出许多问题。
c++代码生成过程

c++代码生成过程摘要:1.C++代码生成过程概述2.代码生成的步骤3.代码生成的工具和技术4.C++代码生成的优点和局限性5.结论正文:C++代码生成过程是指通过某种方式自动或半自动地生成C++代码,以实现某些特定功能的过程。
这种过程可以极大地提高开发效率,减少人工编写代码的工作量,同时也可以减少代码出错的可能性。
下面我们将详细介绍C++代码生成的过程、步骤以及相关的工具和技术。
一、代码生成的步骤C++代码生成过程主要包括以下几个步骤:1.分析:分析用户的需求,明确需要生成的代码的功能和性能要求。
2.设计:根据需求分析的结果,设计代码生成的方案,包括代码结构、函数接口等。
3.模板化:根据设计方案,编写代码生成的模板。
模板可以是手工编写的,也可以是通过代码生成工具自动生成的。
4.代码生成:通过代码生成工具或程序,根据模板生成C++代码。
5.调试和优化:生成的代码可能存在一些问题,需要进行调试和优化,以满足性能和可靠性的要求。
二、代码生成的工具和技术代码生成的工具和技术主要包括:1.模板引擎:如T4、Boost.MPL 等,它们可以根据输入的文本模板生成C++代码。
2.代码生成库:如CMake、AutoConf 等,它们可以根据配置文件生成C++代码。
3.反射和元编程:如C++的template meta-programming,可以实现在编译时生成代码。
4.直接编写:直接编写C++代码,然后通过编译器编译生成目标代码。
三、C++代码生成的优点和局限性C++代码生成的优点包括:1.提高开发效率:减少人工编写代码的工作量,加快开发速度。
2.减少出错率:通过生成的代码可以减少人为的错误。
3.代码可维护性:生成的代码结构清晰,易于维护。
局限性包括:1.模板化复杂:代码生成需要编写模板,模板的设计和编写较为复杂。
2.可维护性:如果生成的代码过多,可能会影响代码的可读性和可维护性。
3.性能问题:生成的代码可能存在性能问题,需要进行调试和优化。
MC9S08系列微控制器的C代码生成研究
MC9S08系列微控制器的C代码生成研究黄志辉;罗峰【摘要】阐述RTWEC自动代码生成的原理、目标驱动模块的设计,以及与CodeWarrior IDE接口的实现;将智能车的随动算法移植到飞思卡尔8位处理器MC9S08QE128上,并通过和手写代码的对比验证了RTWEC自动生成代码的正确性和高效性.所研究的C代码转换技术可以将自动生成的代码,快速、方便地移植到对RTWEC没有专门支持的嵌入式系统中去.【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2010(000)003【总页数】4页(P38-40,44)【关键词】嵌入式系统;RTWEC;自动代码生成;MC9S08QE128【作者】黄志辉;罗峰【作者单位】同济大学,汽车学院,上海,201804;同济大学,汽车学院,上海,201804【正文语种】中文【中图分类】TP391.9引言自动代码生成技术在航空航天、汽车、工业控制及自动化等领域有着广泛的应用。
20世纪90年代,随着计算机技术和软件技术的发展,许多工业领域广泛采用基于模型的设计方法,极大地提高了系统的开发效率。
基于模型的开发方法中一项核心的技术就是自动代码生成技术,在快速原型及系统实现等方面做出了巨大贡献[1]。
Real-Time Workshop Embedded Coder(RTWEC)能够将Simulink中图形化设计的模块生成用户目标所需的C语言代码,该代码可以应用于许多实时或者非实时的场合,比如快速原型和硬件在环测试[2]。
用户可以修改生成的代码,在独立于Matlab之外的环境下执行。
代码转换是RTWEC的应用基础,它能生成与ANSI/ISO标准相兼容的C语言代码,这样的代码可运行于目标微控制器和实时操作系统(RTOS)。
本文以基于飞思卡尔公司的8位微控制器MC9S08QE128的电动智能车转向控制系统系统为例,阐述利用RTWEC生成高质量、高效率的C代码,并移植到该芯片内的过程。
Matlab/RTWEC面向MC9S12D64的自动代码生成

引 言
随 着 汽 车 电 子控 制 系统 的 日益 复 杂 化 , 以及 用 户 对 产
方法 。Байду номын сангаас
1 基 于 模 型 的 设 计
基 于 模 型 的 设计 是利 用 计 算 机 建 模 仿 真技 术 , 快 速 完 成 嵌 入 式 产 品 等 产 品 开 发 过 程 中核 心 算 法 的 开 发 和 验 证 工作 , 利 用 自动 代码 生 成 技 术 快 速 完 成 产 品开 发 中 的 逻 辑
专 题 论 述
面 向 MC 9 S 1 2 D 6 4的 自动代 码 生成
杨 润 泽
( 湖 北 汽 车 工 业学 院 汽 车 工 程 学 院 , 十堰 4 4 2 0 0 2 )
摘 要 :传 统 的 电控 软 件 开发 模 式 已无 法满 足 日益 庞 大 、 复 杂 的 汽 车 电控 系统 的 开发 要 求 , 基 于模 型 的 开 发 方 法 以及 自动
功能 、 处 理 算 法 的实 现 , 同 时 利 用 模 型 的 方 法 构 造 出 被 控 对象 , 方便 、 快捷 、 大 量 重 复地 进 行 产 品控 制 效 果 的 验 证 工 作 。相 比于 传 统 的 开 发模 式 , 基 于模 型 的设 计 开 发 流 程 具
有 以下 一 些 优 点 ] :
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
作者简介 :陆军 (1981 - ) ,男 ,上海人 ,博士生 ,主要从事航空发动机控制与仿真 . E2mail :np u2huoye @mail . nwpu. deu. cn.
序框架参考 ; 数据访问接口为 No ne ; 其它为默认 设置 ; 5) 通过 R TW → Build Subsystem 进行自动 代码生成 ; 6) 移植控制算法代码 : 将相关函数 、 变量的 声明与定义源代码文件包含进电子控制器程序工 程 ; 对初始化 、 执行函数进行相应调用 ; 增加数据 流接口代码部分 . 总体情况如以上步骤所述 , 不同设置会产生 略微不同的代码 , 如优化参数选项 、 注释内容 、 内 存设置 、 积分求解器 、 初始化方案等 .
两种情况下五组数据的相对误差 , 即每组误差与 该组最大值之比 ,从图中可以看出 ,除了在 3 s 时 刻左右 ,即加力接通并加速时刻 , 各参量有 10 - 4 级别误差之外 ,其他时刻几乎没有误差 . 对于存在 的极小误差 ,通过分析代码可知 ,出现这种情况的 原因是初始化方案的细微区别在运行状态转换时 刻所引起的 ,但这类情况对于实际航空发动机电 子控制器的要求可以忽略不计 . 由此 ,可以说明两 种代码所执行结果的精确度是相同的 .
( School of Power and Energy , Nort hwestern Polytechnical U niversit y , Xi ’ 710072 , China ) an Abstract : This paper analyzed auto matic code generatio n technology for co mplex co nt rol of aeroengine wit h real2time wo rkshop embedded coder ( R TW EC) , and described t he p rinci2 areoengine co nt roller ’ multi2variable co nt rol met hod were co mparatively analyzed by Hard2 s ware in2t he2loop simulatio n ( H IL S) of elect ro nic co nt roller . The result s show t hat t his feasi2 ble technology co uld reduce t he workload of p rogramming , checking , debugging , and al so t roller ’ co mplex algorit hm f ro m design and simulatio n to implementatio n. s sho rten t he develop ment cycle , so it can be widely used in t he develop ment p rocess of co n2 Key words : aero space p rop ul sio n system ; aeroengine co nt rol ; co mplex co nt rol met hod ; automatic code generation ; real2time workshop embedded coder ( RTWEC) ; hardware in2t he2loop simulatio n
t/ s
Table 1 Work line of control system simulation
时刻
) 油门杆角度 PLA / (° ( 情况) 70 ( 加速并稳定) 130 ( 加力接通后加速) 80 ( 减速并稳定) 70 ( 加力切断后减速) 60 ( 减速并稳定)
的产品级应用 C 代码 ,并根据目标配置自动生成 高度嵌入式系统实时应用程序 . 典型自动生成嵌入式代码的核心框架为一个 主循环程序 ,不断迭代执行着后台任务或空任务 并检测终止条件 ,而核心任务即 Simulink 模型框 图中真正实现部分的主体代码通过一个定时器周 期性中断调用函数 rt_OneStep 来完成 . 其运行情 况取决于模型是单采样率还是多采样率 , 下面的 伪代码显示了在单采样率程序中的 rt _ OneStep 框架 : void rt_OneStep ( void)
L U J un , GUO Ying2qing , WAN G Bin2zheng
件 Matlab/ Simulink [ 4 ] ,通过数字仿真验证后 , 再 转化为电子控制器中可执行程序进行半实物仿真 验证 ,这也是航空发动机控制系统研制过程中的 关键一步 ,传统做法是需要将设计的控制算法手 动转化为 C 或其它语言 , 这就需要熟悉软件的编 程人员 , 并使大量工作用在程序的编制 、 查错 、 调 试、 验证上面 ,明显增加工作量 ,延长研制周期 ; 此
基于RTWEC的控制算法自动代码生成技术(AP端浏览体验不佳。建议您优先选择TXT,或下载源文件到本机查看。
第 23 卷 第 6 期 2008 年 6 月
文章编号 : 100028055 ( 2008) 0621131204 实现的开发过程 .
{
由此我们可以看出 , 相比快速原型化类型代 码而言 ,其框架结构十分简单 ,这也为程序移植提 供了很大的便利性 , 不需要对其做很大修改就可 直接调用 .
2 控制算法代码自动生成流程
以 L Q G/ L TR 多变量鲁棒控制算法 ( 图 1 ) 为例 ,说明其从自动生成代码到平滑移植入电子 控制器 C 语言程序的操作流程 ,如下所示 : 1 ) 安装 RTWEC V6. 6 : 需要 Matlab R2007a ,
[3 ]
Simulink V6. 6 , R TW V6. 6 , 编 译 器 推 荐 使 用
R TW) 中一个独立的扩展模块 . 它能直接从 Sim2
检查中断溢出或者其它错误 ; 开启中断 ; 模型单步执行 ; }
3 实时仿真验证
为了确认自动生成代码的有效性 , 包括精确 度、 执行效率两方面 ,将在半实物仿真环境中与手 动编写代码进行比较验证 .
Generate an example main p rogram → BareBoard2
图 1 Simulink 下 L Q G/ L TR 控制算法模型图
Fig. 1 Q G/ L TR cont roller model in Simulink L
6期 第
航空动力学报
Journal of Aerospace Power
Vol. 23 No . 6 J une 2008
基于 R TW EC 的控制算法自动代码生成技术
陆 , 郭迎清 , 王斌正 军
( 西北工业大学 动力与能源学院 , 西安 710072)
控制算法的手动编程和自动生成代码进行电子控制器半实物仿真并比较分析 . 结果说明该方法简单 、 易行 ,有 效降低了程序编制 、 查错和调试的工作量 ,缩短了研制周期 ,可以广泛用于控制器复杂算法从设计仿真到具体
Automatic code generation technology f or control method based on RTWEC
摘 : 研究基于实时工作间嵌入式代码生成器 ( Real2time workshop embedded coder ,R TWEC) 的航空 要 发动机复杂控制算法自动生成可执行代码技术 ,介绍原理及其应用方法 . 针对某型航空发动机控制器多变量 关 : 航空 、 键 词 航天推进系统 ; 航空发动机控制 ; 复杂控制算法 ; 自动代码生成 ; 实时工作间嵌入式代码生成器 ( R TW EC) ; 半实物仿真 中图分类号 : V2331 7 文献标识码 : A
ple and applied met ho d. Auto matically generated and manually p rogrammed codes of an
近年来 ,随着微电子技术的不断发展 ,全权限
数字电子控制 FAD EC 技术已是国内外航空发动 机控制领域发展的必然趋势[ 122 ] . 由于航空发动机 结构的高度复杂性以及对其性能要求的逐步提 高 ,促使相应的控制算法 , 特别是多变量控制 、 故 [3 ] 障诊断等 变得更加复杂 . 而对于复杂控制算法 设计与仿真 ,目前多采用先进的设计仿真平台软
Visual C/ C + + 6. 0 以上版本 ; 2) 在 Simulink 下将设计完成的算法模型进
行离散化 、 反归一化等准备工作 ; 3) 简化该部分与其他模型的数据流接口 ,并 使其转化为子模型 ; 4) 设置 R TW 参数选项 : 积分求解器为 fixed2 step ;目标系统文件为 ert . tlc ( Visual C/ C + + pro2 ject makefile only for RTWEC) , 语言为 C ; 模板编 联文件为 ert_msvc. tmf ; 选中 Single output/ update
1132
航 空 动 力 学 报
第 23 卷
外 ,手动编制的代码良莠不齐 ,降低了软件运行的 可靠度 ,提高了代码错误的风险性 . 在航空发动机控制领域里 , 电子控制器主要 采用嵌入式系统来实现 , 那么其控制算法需以嵌 入式代码格式编写 、 . 因此 , 本文将主要研究 编译 基于嵌入式代码生成器的航空发动机复杂控制算 法自动生成可执行代码技术 , 介绍其原理以及应 用方法 ,通过实例对自动生成代码和手动编程进 行比较分析 ,结果说明本文提出的自动代码生成 方法简单 、 易行 , 有效降低了程序编制 、 查错和调 试的工作量 ,缩短了研制周期 ,可以广泛用于控制 器复杂算法从设计仿真到具体实现的开发过程 .