A Virtual Erection Simulation System for a Steel Structure Based on 3-D Measurement Data
theapplicationofvirtualrealitytechnologyindriving

The Application of Virtual Reality Technology in Driving Training in ExceptionalScenesZhou LikunContinuing Education SchoolShanghai Jiao tong UniversityShanghai ,ChinaAbstract—With the increasing number of vehicles in China, the traffic condition is getting worse and worse. To drive safely in exceptional scenes is very significant to life and property. Using a technique with computer simulation, virtual reality and hardware such as sensors and computer interface, to simulate the interactions between driver and vehicle in such scenes is very interesting. This paper introduces the concept of this technique and the details of software and hardware components to make of this training system.Keywords- Virtual Reality, Driving Training, Exceptional ScenesI.OVERVIEWIn recent years, driving training systems are welldeveloped in traditional scopes such as subject II (parking examination) and subject III (driving examination). Thesesystems are focus on normal traffic scenes such as subway in a fine day. These systems can really make new drivers master the basic driving techniques more easier. By doing a certain operation again and again such as when and where the steering wheel, the brake should be operated, newbies can pass these examinations very easily. But it does not mean that they have already been versatile veterans and mastered all necessary skills to deal with the exceptional scences such as muddy or icy roads in strom or hailstone days.Recently, Ministry of Transport of the PRC proposedanother subject to examinate the drivers in such exceptional scenes, for instance, driving on muddy, icy, steep country roads or spiral hill roads in a rainy, stormy, foggy or snowy day, etc. It’s very unpratical or impossible to train the drivers in real exceptional scenes as it’s very dangerous and these scenes are very occassional. But with the new technologies in computer VR and hardware we can build a system to simulate such an virtual environment to train the drivers without life danger and with high training quality.II.SYSTEM CONCEPT AND CONSTRUCTIONI NTRODUCTIONThe system consists of two parts:●Hardware: a vehicle without wheels, new sensors andfactory sensors connected by CAN-Bus and embeded into this vehicle, interfacing circuit such as OA, MUX,A/D or D/A conversion circuit, DSP, force feedback in VR, display screen, multichannel stereo, etc..●Software: signal system, VR system, driver behaviorexpert system (DBES).●Signal system collects/sends signal from/tosensors or force feedback devices to simulate theinteraction between driver and vehicle or VRenvironment.●VR system simulates the exceptional trainingscenes and the interaction between driver orvehicle and all objects such as ice and snow, fog,roads, hills, etc. in VR environment.●DBES collects the driver’s behaviors in such anexceptional scene through the signals collectedfrom sensors, force feedback devices, etc. Firstly,with self-learning, it will know if a certainbehavior is effctive and will build up a behaviordecision database. Later, with this database, it canjudge the driver’s behaviors and give out theexamination points.The system should be configured beforehand such as selecting a vehichle (car, bus or truck) and a specific scene. Different vehicles and scenes will impact the vehicle’s velocities, turn radius, force coefficient, and signal parameters of sensors, etc. and eventually, the response ofthe system. The system construction is given in Figure 1.Figure 1. System ConstructionIII.HARDWARE COMPONENTSThe infrastucture of the system is a cab from a real vehicle (a bus, a truck, or a car), with other electronical devices such as sensors, force feedback devices, a signalprocess microcontroller, preamplifiers, filters, MUX, timer circuit, sample/hold, D/A and A/D conversion circuit in a PCB. This PCB will do all signal processing which comes from or sends to sensors/force feedback devices. All sensors are interconnected with CAN-Bus. They collect all needed parameters about the vehicle such as velocity, ON/OFF of all lights, positions of brake, gears, accelerator pedal, angle of steering wheel, etc.. The hardware components in this PCBare given in Figure 2[1].Figure 2. Hardware Components of the SystemA. SensourSensors can be used to detect displacement, temperature, strain, force and light, and so on. Sensor is a type of transducer which can transfer the physical quantity to electrical signal[1]. There are a great variety of sensors used in vehicle. In our virtual training system, we mainly use the following types of sensors, shown in Figure 3.Figure 3. Sensors Used in the SystemB. CAN-BusCAN (Controller Area Network) is sponsored by BOSCH and now is widely accepted as an industry standard for interconnection of vehicle-mounted sensors. It is a serial communications network that supported distributed and real-time access effectively. Normally, DeviceNet protocol and CANopen protocol based on CAL (CAN Application Layer) are used in a CAN network to support the direct access of equipment parameters and process data communication in real time. All kinds of information from senors mounted all over the vehicle connected to a CAN can be transported to CAN-Bus very fastly, effectively and accurately without interferenced.C. Discrete Signal Processor (DSP)Sensors collect all signals from a vehicle, such as angle signal of steering wheel, position signal of gear, position signal of hand brake and braking pedal, position signal of clutch, position signal of accelerator, velocity of the vehicle, signal of turn lights, headlights, taillights and fog lights.Some of these signals are ON/OFF signals, while the others are continuous signals. But all these signals are analog signals. They will be amplified, filtered, sampled, and at last be converted into digital signal for further processing by DSP (Discrete Signal Processor). And only after that, these digital signals can be accepted by IO interface of computer and then the software system. The software system will analyze these signals to interact with VR system. On the other hand, the interaction between vehicle and VR system (for example, ups and downs roads, winding roads) are translated into digital signals. These signals will be sent to DSP through the computer IO interface for further processing and hereafter to be converted into analog signals in the reverse data path and at last control the devices mounted on the vehicle, such as force feedback devices. D. Force Feedback SystemForce feedback in this system is to simulate the real force from steering wheel, accelerator pedal, brake pedal and clutch pedal, gear handlebar etc. in real driving and will adjust the amount based on the VR scenes such as muddy or dry road, turn radius, etc[2]. All these forces are parameterized first in a configuration file and therefore VR sub-system is parameterized accordingly.IV. SOFTWARE COMPONENTSThe software consists of the following parts: VR basic component library, script generation engine, script parser, random parameters seeds generator, fractal and particle system, render engine, DBES expert system. The scene contains some regular objects from the VR basic componet library. And Fractal and Particle system generates irregular rain, snow, hailstone and fog, 3D terrains as other graphic systems based on the script generated by script generatin engin. The Render engine renders the scene and outputs it to display. The DBES sub-system will self-learn the drivers’ behaviors to construct its rules database and in turn to judge if the driver’s behavior is effective or not. The structure ofsoftware is shown in Figure 4.Figure 4. Software Components of the SystemA. VR Basic Component LibraryIn this system, a VR basic component library populates some common regular models such as roads (straight, winding, ramp, bridge, etc.), buildings, traffic signs, other vehicles and pedestrians to construct the basic scene veryeasily. This library can be expanded by creating new components or imported from other modelling softwares. B.Script Generation EngineWhen the system is configured to a special vehicle and a special scene, the system configuration module will invoke the Script Generation Engine to generata a random scene in this special type automatically according to special syntax rules in Script Parser. This script can be created or modified manually as long as the syntax rules are totally obeyed. C.Script ParserScripts generated by the Script Generation Engine or by users are all synthetic language. To improve the performance of Render Engine, the scripts should be interpreted or compiled or parsed into a certain formatted binary file that contains many kinds of data structures which describe the whole scenes in an effetive way and meaningful to Render Engine.D.Parameters Seeds GeneratorThis module is to randomize the scene generated by parsed scripts. After randomizing, driver will interact different scenes even the configurations are same. The purpose of this is to avoid the driver always taking the same opertions in a rigid scene and the training is meaningless afterwards. Furthermore, for getting more realistic effects, some objects generated by fractal and particle system are needed to be randomized too. Therefore this module will provide the random seeds to fractal and particle system.E.Fractal and Particle SystemMany natural objects, such as leaves, grass, hills, coastlines, etc., have irregular appearances and are very hard to modeled. But all these objects have a very prominent character, self-similarity and it’s the professional scope of fractal system modeling. Fractal algorithm is only based on initial condition and proceeding morph algorithm, and perhaps the randomizing when morph.On the other hand, some objects such as rain, snow, water-drop, flame, etc., have totally random distribution of parameters, for example, shape, direction of motion, velocity and life cycle. In particle system, the actual graphic attributes of the object is irrelevant and the essential is particles’ random Brownian movement. In particle system, graphical attributes (shape, size, color, transparence, …) and motion attributes of an object are all randomized. Random algorithm can find its usage here one more time.Both fractal and particle systems have an inherent character which is very useful if computer graphic is concerned: objectes created by these two algorithms are very easy to be LODed (Level Of Detail). LOD is a very useful technique to reduce details of a scene and hence improve the render performance greatly by modeling an object in differnet levels of detail and only render the low level detail when this object is not in the focus of the scene or in a long distance from the viewpoint.F.Render EngineAfter all objectes are created and randomized, the whole scene defined by the parser is ready to be rendered by the render engine. The render engine is simliar to render engines in other modeling softwares except it has a front-end to pre-process the customized binary data structres which defines all objects in a scene. It has no need to be discussed very detail here. At last, this scene is output smoothly on LCD display.G.DBESThe DBES expert system works in two phases: firstly it self-learns drivers’ behavior if it’s effective to constuct its rules database; secondly, it analyses the results of driver’s behavior, and judges if these behaviors are effective or not in these given scenes, and if a behavior is effective but not in the rule database, the DBES will add it into the database too. As it’s same with other expert systems, it’s discussed here only for completeness.V.SUMMARYThis paper introduces the concepts of a driving training system for exceptional scenes and the software and hardware construction with a new usage of VR system. This system combines software technologies such as virtual reality and hardware technologies such as sensors and computer interfaces, simulates some complex road conditions and exceptional scenes and the interactions between driver and VR scenes.R EFERENCES[1]Stephen E. Derenzo. Practical Interfacing in the Laboratory: Using aPC for instrumentation, data analysis, and control, China Machine Press, Apr., 2006, PP: 1-3.[2]JING Xu, CHAI Shan. Research and Development of Vehicle VirtualDriving System Based on Virtual Reality Technology, Shandong University Of Technology, Master's Thesis, Apr., 2007, PP: 73.Below is given annual work summary, do not need friends can download after editor deleted Welcome to visit againXXXX annual work summaryDear every leader, colleagues:Look back end of XXXX, XXXX years of work, have the joy of success in your work, have a collaboration with colleagues, working hard, also have disappointed when encountered difficulties and setbacks. Imperceptible in tense and orderly to be over a year, a year, under the loving care and guidance of the leadership of the company, under the support and help of colleagues, through their own efforts, various aspects have made certain progress, better to complete the job. For better work, sum up experience and lessons, will now work a brief summary.To continuously strengthen learning, improve their comprehensive quality. With good comprehensive quality is the precondition of completes the labor of duty and conditions. A year always put learning in the important position, trying to improve their comprehensive quality. Continuous learning professional skills, learn from surrounding colleagues with rich work experience, equip themselves with knowledge, the expanded aspect of knowledge, efforts to improve their comprehensive quality.The second Do best, strictly perform their responsibilities. Set up the company, to maximize the customer to the satisfaction of the company's products, do a good job in technical services and product promotion to the company. And collected on the properties of the products of the company, in order to make improvement in time, make the products better meet the using demand of the scene.Three to learn to be good at communication, coordinating assistance. On‐site technical service personnel should not only have strong professional technology, should also have good communication ability, a lot of a product due to improper operation to appear problem, but often not customers reflect the quality of no, so this time we need to find out the crux, and customer communication, standardized operation, to avoid customer's mistrust of the products and even the damage of the company's image. Some experiences in the past work, mentality is very important in the work, work to have passion, keep the smile of sunshine, can close the distance between people, easy to communicate with the customer. Do better in the daily work to communicate with customers and achieve customer satisfaction, excellent technical service every time, on behalf of the customer on our products much a understanding and trust.Fourth, we need to continue to learn professional knowledge, do practical grasp skilled operation. Over the past year, through continuous learning and fumble, studied the gas generation, collection and methods, gradually familiar with and master the company introduced the working principle, operation method of gas machine. With the help of the department leaders and colleagues, familiar with and master the launch of the division principle, debugging method of the control system, and to wuhan Chen Guchong garbage power plant of gas machine control system transformation, learn to debug, accumulated some experience. All in all, over the past year, did some work, have also made some achievements, but the results can only represent the past, there are some problems to work, can't meet the higher requirements. In the future work, I must develop the oneself advantage, lack of correct, foster strengths and circumvent weaknesses, for greater achievements. Looking forward to XXXX years of work, I'll be more efforts, constant progress in their jobs, make greater achievements. Every year I have progress, the growth of believe will get greater returns, I will my biggest contribution to the development of the company, believe inyourself do better next year!I wish you all work study progress in the year to come.。
IBM Tivoli Monitoring for Virtual Environments 7.2

IBM Tivoli Monitoring for Virtual EnvironmentsVersion 7.2Fix Pack 2Quick Start GuideUse this guide to get started with a typical installation of IBM Tivoli Monitoring for Virtual Environments National Language Version:To obtain the Quick Start Guide in other languages,print the language-specific PDF from the installation media.Product overviewTivoli ®Monitoring for Virtual Environments provides a comprehensive tool to monitor the availability and performance of virtual environments.In addition,Tivoli Monitoring for Virtual Environments provides performance and capacity reporting of virtual environments and helps you with capacity planning activities tooptimize,consolidate,and balance the overall capacity of the virtual environments.For more detailed information,see the Tivoli Monitoring for Virtual Environments Version 7.2Fix Pack 2information center (/infocenter/tivihelp/v61r1/topic/com.ibm.tivoli.itmvs.doc_7.2.0.2/welcome_ve72fp2.htm).v InfoSphere ®Federation Server V10.1v IBM Tivoli Monitoring V6.3Fix Pack 2v JAZZ for Service Management V1.1Fix Pack 1–Dashboard Application Services Hub V3.1Fix Pack 1–Tivoli Common Reporting V3.1Fix Pack 1–WebSphere ®Application Server V8.5Fix Pack 1This product offering includes the following monitoring software:v IBM Tivoli Monitoring Agent for Network Devicesv IBM Tivoli Monitoring for Virtual Environments Agent for Cisco UCSv IBM Tivoli Monitoring for Virtual Environments Agent for Citrix XenAppv IBM Tivoli Monitoring for Virtual Environments Agent for Citrix XenDesktopv IBM Tivoli Monitoring for Virtual Environments Agent for Citrix XenServerv IBM Tivoli Monitoring for Virtual Environments Agent for Linux Kernel-based Virtual Machinesv IBM Tivoli Monitoring for Virtual Environments Agent for NetApp Storagev IBM Tivoli Monitoring for Virtual Environments Agent for VMware VIv IBM Infrastructure Management Capacity Planner for PowerVM ®v IBM Infrastructure Management Capacity Planner for VMwarev IBM Infrastructure Management Dashboard for VMwarev IBM Tivoli Monitoring for Virtual Environments Performance and Capacity Management ReportsFor complete documentation,including installation instructions,see the publications in the following libraries in the Tivoli Software Information Center (/infocenter/tivihelp/v61r1/index.jsp):v Tivoli Monitoringv Tivoli Monitoring for Virtual EnvironmentsTo install the prerequisites for the capacity planner,dashboard,and reports components,see the IBM Tivoli Monitoring for Virtual Environments Dashboard,Reporting,and Capacity Planning User’s Guide .See the following publications for complete information:v Agent-specific installation and configuration information for the monitoring agent chapter of the user's guide for the monitoring agents that you are installing.v IBM Tivoli Monitoring Installation and Setup Guidev IBM Tivoli Monitoring for Virtual Environments Dashboard,Reporting,and Capacity Planning User’s GuideMore informationFor additional technical resources,see the following information centers:v IBM Tivoli Monitoring:(/infocenter/tivihelp/v61r1/topic/com.ibm.itm.doc_6.3fp2/welcome.htm)v IBM Tivoli Monitoring for Virtual Environments:(/infocenter/tivihelp/v61r1/topic/com.ibm.tivoli.itmvs.doc_7.2.0.2/welcome_ve72fp2.htm)Tivoli Monitoring for Virtual Environments Version 7.2Fix Pack 2,Licensed Materials -Property of IBM.©Copyright IBM Corp.2009,ernment Users Restricted Rights -Use,duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp.IBM,the IBM logo,and ®are trademarks or registered trademarks of International Business Machines Corp.,registered in many jurisdictions worldwide.Other product and service names might be trademarks of IBM or other companies.A current list of IBM trademarks is available on the Web at “Copyright and trademark information”(/legal/copytrade.shtml).Part Number:CF3XQMLPrinted in Ireland。
wokwi 仿真原理

wokwi 仿真原理English Answer.Wokwi Simulation.Wokwi is an online circuit simulator that allows users to create and simulate electronic circuits without the need for physical components or breadboards. It provides a user-friendly interface and a wide range of components, making it easy to design and test circuits in a virtual environment.Wokwi uses a web-based simulator that runs on theuser's browser. The simulator uses a physics engine to simulate the electrical behavior of the circuit. This allows users to interact with the circuit in real-time, changing component values and observing the resulting changes in the circuit's behavior.Wokwi also provides a range of analysis tools thatallow users to analyze the circuit's performance. These tools include a waveform viewer, a Bode plotter, and a frequency response analyzer. These tools allow users to visualize the circuit's behavior in both the time and frequency domains.Wokwi is a powerful tool for designing and testing electronic circuits. It is easy to use and provides a wide range of features that make it suitable for a variety of applications.Wokwi Simulation Principle.Wokwi uses a physics engine to simulate the electrical behavior of a circuit. The physics engine is based on the laws of physics that govern the behavior of electrical circuits. These laws include Ohm's law, Kirchhoff's laws, and the Faraday's law of induction.The physics engine simulates the behavior of each component in the circuit by solving the appropriate equations. For example, the physics engine simulates thebehavior of a resistor by solving Ohm's law. The physics engine also simulates the behavior of capacitors and inductors by solving the appropriate equations.The physics engine updates the state of the circuit at regular intervals. This allows the user to interact with the circuit in real-time and observe the resulting changes in the circuit's behavior.中文回答:Wokwi 仿真原理。
surrogate model 解释
英文回答:The proxy model is a mathematical model used to simulate the behaviour ofplex systems. It is designed to simplifyplex systems and make them easier to process. Proxy models are usually built on existing data or empirical knowledge, using mathematics, statistics or machine learning. It can replace the original system for forecasting, optimization or control, thus saving costs and time. Proxy models are widely used in modern science and engineering, for example in aircraft design using proxy modelsto simulate aerodynamics and in chemical engineering to optimize production processes.代理模型是一种数学模型,用于模拟复杂系统的行为。
其设计旨在简化复杂系统,使其易于处理。
代理模型通常基于已有数据或经验知识,利用数学、统计学或机器学习等方法建立起来。
它可以替代原系统进行预测、优化或控制,从而节约成本和时间。
代理模型在现代科学和工程领域有广泛应用,例如在飞行器设计中利用代理模型模拟空气动力学,在化工工程中利用代理模型优化生产过程。
The proxy model has many advantages. For example, it could simplify the originalplex system and make calculations more efficient. Some systems are inherentlyplex and requireconsiderableputing resources to analyse and optimize. But proxy models can extract key features and patterns and then solve problems with simple mathematical models, so they can produce results quickly. The proxy model could also supplement the original system data. Some systems may have little or no access to data, which makes analysis difficult. However, proxy models can predict missing data by using available data or empirical knowledge, thus making system—wide analysis moreplete.代理模型有很多好处。
虚拟仿真技术在中职汽车专业实训教学中的应用与思考
AUTOMOBILE EDUCATION | 汽车教育中职汽车专业引入虚拟仿真实训资源,既是改革传统教学育人手段,推进人才培养模式创新的迫切需要,也是强化理论教学和实训教学相融合的教育教学活动,有效弥补职业教育实训中看不到、进不去、成本高、危险性大等特殊困难的重要措施。
汽车专业群是中职教育的大类专业,在专业技能实训方面引入虚拟仿真资源在将一定程度上改善汽车实训的普及率,通过虚拟仿真,把学生引入到生动、直观的教学环境中,提高了学生的积极性,有利于提高学生的技能水平。
1 汽车专业实训设备跟不上教育教学改革的需求由于实训设备跟不上教学的需求,学生动手实训时间少,技能训练水平跟不上岗位需求。
实训设备跟不上教学需求主要矛盾是汽车专业学生人数多,实训设备台套少。
汽车专业在很多工科类院校里是大专业,学生人数众多,开设校汽车运用与维修专业的职业学校,该专业每年招生少则100人,多则上1000人。
大部分院校的设备配套是跟不上的,包括实训设备的场地小开设的实训室有限、设备的种类少开设的实训项目不多、设备的数量数少不能分组操作。
这个客观存在的矛盾造成了学生在学习技能时人均训练时间不足,技能水平难以达到岗位要求,因此,要提高职业技能教育质量,必须要先想方设法解决这个矛盾。
同时,随着新能源汽车类课程的开设,高压安全防护成为教学中需要认真对待的现实问题,特别是初学者的作业安全防护、作业技能不规范、不熟悉,实训教学过程存在一定要安全隐患。
虚拟仿真技术的出现,在汽车实训教学上的使用,是技能教学和实操训练的有效弥补。
科学、合理的使用,有可能成为解决实训教学中“高投入、高损耗、高风险、难实施、难观摩、难再现”三高三难的问题,提高汽车专业实训教学的质量。
2 虚拟仿真技术的发展现状我国虚拟仿真技术的起步较晚,但是发展较为迅速,早期的虚拟仿真技术主要用于军事和科研领域。
2010前后部分企业研发了基于二维平面的汽车虚拟仿真实训平台,并投入实训教学应用当中,2016年虚拟现实(VR技术)正式推出,2016年被定义为VR技术虚拟仿真技术在中职汽车专业实训教学中的应用与思考王莹海南省工业学校 海南省海口市 570012摘 要:中职汽车专业实训教学面临着实训普及率低的痛点,不利学生技能的培养,建立虚拟仿真实训平台,引进基于3D/VR/AR技术的实训教学资源,开展虚拟仿真实训教学,利用仿真技术加强汽车专业技能实训教学,推动信息技术与教育教学深度融合,有利于提高实训普及率,有利于解决“三高三难”,推动汽车专业教学变革创新。
Quartus_II_Simulation

Introduction to Simulationof Verilog DesignsII14.11IntroductionAn effective way of determining the correctness of a logic circuit is to simulate its behavior.This tutorial provides an introduction to such simulation using Altera’s Quartus II CAD system.The simulation method used in this tutorial is based on drawing waveforms,similar to timing diagrams,that are inputs for a simulator tool.The outputs of the simulator are also in the form of waveforms.This tutorial is intended for students who are taking a course in logic circuit design.We show how to use the Simulation Waveform Editor tool provided in the Quartus II software to perform a simulation of a circuit specified in Verilog HDL.Only a very basic understanding of Verilog is needed for this purpose.Contents:•Design Project•Creating Waveforms for Simulation•Simulation•Making Changes and Resimulating•Concluding Remarks1 Altera Corporation-University ProgramDecember2014The Simulation Waveform Editor tool is available for use with Altera’s Quartus II software version13.0or later.It allows the user to apply inputs to the designed circuit,usually referred to as test vectors,in the form of waveforms and to observe the outputs generated in response.In this tutorial,the reader will learn about:•Test vectors needed to test the designed circuit•Using the Simulation Waveform Editor tool to draw test vector waveforms•Functional simulation,which is used to verify the functional correctness of a synthesized circuit•Timing simulation,which is used to verify the timing of signals in a synthesized circuitThis tutorial is aimed at the reader who wishes to simulate circuits defined by using the Verilog hardware description language.An equivalent tutorial is available for the user who prefers the VHDL language.2Design ProjectTo illustrate the simulation process,we will use a very simple logic circuit that implements the majority function of three inputs,x1,x2and x3.The circuit is defined by the expressionf(x1,x2,x3)=x1x2+x1x3+x2x3In Verilog,this circuit can be specified as follows:module majority3(x1,x2,x3,f);input x1,x2,x3;output f;assign f=(x1&x2)|(x1&x3)|(x2&x3);endmoduleThe desired circuit has to be implemented in a Quartus II project.To do so,create a new directory(folder)for the Quartus II project;in this tutorial we call the folder simulation_intro.Enter the Verilog code for the majority3module into afile called majority3.v in the project directory.Then,create a Quartus II project and call it majority3.For the project choose as the target device any FPGA chip of your choosing;for example,select the EP4CE115F29C7, which is the device on the Altera DE2-115board,or the5CSEMA5F31C6,which is the device on the DE1-SoC board.2Altera Corporation-University ProgramDecember20143Creating Waveforms for SimulationTo create test vectors for your design,select File>New...>Verification/Debugging Files>University Program VWF in the Quartus II window where the design project is open.This opens the Simulation Waveform Editor tool, shown in Figure1,which allows you to specify the desired input waveforms.Figure1.The Waveform Editor window.For our simple circuit,we can do a complete simulation by applying all eight possible valuations of the input signals x1,x2and x3.The output f should then display the logic values defined by the truth table for the majority function.We will run the simulation for800ns;so,select Edit>Set End Time...in the Waveform Editor and in the pop-up window that will appear specify the time of800ns,and click OK.This will adjust the time scale in the window of Figure1.Before drawing the input waveforms,it is necessary to locate the desired signals in the implemented circuit.In FPGA jargon,the term“node”is used to refer to a signal in a circuit.This could be an input signal(input node), output signal(output node),or an internal signal.For our task,we need tofind the input and output nodes.This is done by using a utility program called the Node Finder.In the Waveform Editor window,select Edit>Insert>Insert Node or Bus....In the pop-up window that appears, which is shown in Figure2,click on Node Finder.3 Altera Corporation-University ProgramDecember2014Figure2.The Insert Node or Bus dialog.The Node Finder window is presented in Figure3.Afilter is used to identify the nodes of interest.In our circuit, we are only interested in the nodes that appear on the pins(i.e.external connections)of the FPGA chip.Hence,the filter setting should be Pins:all.Click on List,which will display the nodes as indicated in thefigure.In a large circuit there could be many nodes displayed.We need to select the nodes that we wish to observe in the simulation. This is done by highlighting the desired nodes and clicking on the>button.Select the nodes labeled x1,x2,x3,and f,which will lead to the image in Figure4.Click OK in this window and also upon return to the window in Figure2. This returns to the Waveform Editor window,with the selected signals included as presented in Figure5.Figure3.The Node Finder dialog.4Altera Corporation-University ProgramDecember2014Figure4.The selected signals.Observe that in Figure5all input signals are at logic level0.The output,f is shown as undefined.Next,we have to draw the input waveforms.Then,we will simulate the circuit,which will produce the output waveform.To make it easier to draw the input waveforms,the Waveform Editor displays dashed grid lines.The spacing of the grid lines can be adjusted by selecting Edit>Grid Size...,and in the pop-up box in Figure6specifying the desired size.The spacing of grid lines in Figure5is20ns.Another convenience in drawing is to have transitions of a waveform snap on grid lines.This feature is activated by clicking on the Snap to Grid icon,or by selecting the command Edit>Snap to Grid.Figure5.Signals in the Waveform Editor window.Altera Corporation-University Program5 December2014Figure6.Specifying the grid spacing.Input waveforms can be drawn in different ways.The most straightforward way is to indicate a specific time range and specify the value of a signal.To illustrate this approach,click the mouse on the x1waveform near the400-ns point and then drag the mouse to the800-ns point.The selected time interval will be highlighted in blue,as depicted in Figure7.Change the value of the waveform to1by clicking on the Forcing High(1)icon,as illustrated in Figure8.Figure7.Selection of a time interval.6Altera Corporation-University ProgramDecember2014Figure8.Drawing the waveform for x1In creating the waveform for x1,we used the icon to implement the logic value1.Another possibility is to invert the value of the signal in a selected time interval by using the Invert icon.We will use this approach to create the waveform for x2,which should change from0to1at200ns,then back to0at400ns,and again to1at600ns. Select the interval from200to400ns and click on the icon.Then do the same for the interval from600to800ns, as illustrated in Figure9.Figure9.Drawing the waveform for x2.We will use a third approach to draw the waveform for x3.This signal should alternate between logic values0and 1at each100-ns interval.Such a regular pattern is indicative of a clock signal that is used in many logic circuits. Even though there is no clock signal in our example circuit,it is convenient to specify x3in this manner.Click on the x3input,which selects the entire800-ns interval.Then,click on the Overwrite Clock icon,as indicated in Figure10.This leads to the pop-up window in Figure11.Specify the clock period of200ns and the duty cycle of7 Altera Corporation-University ProgramDecember201450%,and click OK.The result is depicted in Figure12.Figure10.Drawing the waveform for x3.Figure11.Defining the clock characteristics8Altera Corporation-University ProgramDecember2014Figure12.The completed input waveforms.Save the waveformfile using a suitable name;we chose the name majority3.vwf.Note that the suffix vwf stands for vector waveformfile.VWFfiles that are added to the Quartus II project can be accessed at any time in the Project Navigator Widget’s Files tab.4SimulationThe Simulation Waveform Editor performs the simulation by using the simulation tool known as ModelSim.ModelSim-Altera Edition is strongly recommended for use with the Simulation Waveform Editor,as it contains the Altera de-vice libraries necessary for simulations.To use a standard version of ModelSim,the path to its executables must be specified in the Quartus II software under Tools>Options...>EDA T ool Options.If both ModelSim and ModelSim-Altera are available,the simulator will preferentially use ModelSim-Altera.4.1Functional SimulationNow that we have created the input vector waveform,we can simulate the circuit.In the Simulation WaveformEditor,select Simulation>Run Functional Simulation,or click on the icon.A pop-up window will show the progress of the simulation,then automatically close when it is complete.A second Simulation Waveform Ed-itor window then opens the output waveform,as depicted in Figure13.The output waveform is read-only,so any changes in simulation have to be done by modifying the majority3.vwffile and resimulating the circuit.Observe that the output f is equal to1whenever two or three inputs have the value1,which verifies the correctness of our design.9 Altera Corporation-University ProgramDecember2014Figure13.Result of the functional simulation.4.2Timing SimulationTo observe the actual propogation delays in our circuit,we have to perform a timing simulation.(Note that for FPGA devices with preliminary timing models that the timing simulation results may be the same as functional simulation results.)In the Simulation Waveform Editor,select Simulation>Run Timing Simulation,or click on the icon.A pop-up window will show the progress of the simulation,then automatically close when it is complete.A second Simulation Waveform Editor window then opens the output waveform.The output waveform is read-only,so any changes in simulation have to be done by modifying the majority3.vwffile and resimulating the circuit.The timing simulation shows that there are delays when signals change from one value to another.Figure14shows the waveform,zoomed in at300ns to show the propogation delay between x3and f.The waveform indicates that the maximum delay is approximately6ns.10Altera Corporation-University ProgramDecember2014Figure14.Result of the timing simulation,zoomed in at300ns.5Making Changes and ResimulatingChanges in the input waveforms can be made using the approaches explained above.The circuit can then be resimu-lated using the altered waveforms.For example,change the waveform for x1to have the logic value1in the interval from100to240ns,as indicated in Figure15.Now,simulate the circuit again.The result is given in Figure16.If errors in the circuit are discovered,then these errors can befixed by changing the Verilog code and recompiling the design using the Quartus II software.Figure15.Modified input waveforms.Figure16.Result of the new simulation.6Concluding RemarksThe purpose of this tutorial is to provide a quick introduction to the Simulation Waveform Editor,explaining only the rudimentary aspects of functional and timing simulations.Details about additional features of the Simulation Waveform Editor can be found in the appendix of this document.To learn about more about simulating circuits using ModelSim,please refer to the tutorials Introduction to Model-Sim’s Graphical Waveform Editor,and Using ModelSim to Simulate Logic Circuits,which are available on Altera’s University Program website.12Altera Corporation-University ProgramA Simulation Waveform EditorIn section3we introduced the Waveform Editor tool,which is used to view and edit waveforms that are used in simulation.Additional features of the Waveform Editor are described in this appendix.A.1Waveform Editor ToolbarThe Waveform Editor window is illustrated in Figure1.The tool includes several commands which can be accessed by using the mouse,including File,Edit,View,Simulation,and Help.Below these commands,as shown in the figure,there is a toolbar that contains a number of icons which are useful when manipulating waveforms.This toolbar should be visible by default,but if it is not visible,then right-click near the top of the window(below the title bar)and select Waveform Editor in the menu that appears.The toolbar icons are described below.Selection T oolThis tool is used to select waveform intervals and apply changes.To make a selection,click on any part of a waveform and drag the blue box across the desired interval.It’s possible to select multiple waveforms at the same time,as shown in Figure1,or select entire waveform(s)by clicking on its name(s).ing the Selection Tool to select a portion of multiple waveforms.Double clicking the selection tool anywhere on a waveform will select the largest interval with the same value from where the cursor points.Double clicking on a selected interval brings up the window to set arbitrary values for that interval.Zoom T oolThis tool is used to zoom in or zoom out in the waveform display,as indicated in Figure2.Left-clicking zooms into the display and right-clicking zooms out.ing the Zoom Tool.Forcing Unknown(X)This tool allows the selected part of a waveform to be set to the value Unknown(x).An example is given in Figure3,using the majority3function circuit that was described in section2.The value of the signal x3has been set to unknown for thefirst half of the simulation.Running the simulation with these input values results in the output waveform f that is shown in thefigure.Note that the value of f is unknown between200to400 ns.Figure3.Setting the value of an input to Unknown(X).Forcing Low(0)and Forcing High(1)These tools are used to force the selected part of a waveform to the value low(0)or high(1),as shown in Figures4and5,respectively.14Altera Corporation-University ProgramFigure4.Forcing x1to be low from0to400ns.Figure5.Forcing x1to be high from400to800ns.High Impedance(Z)This tool forces the selected waveform to the value High Impedance(Z),as shown in Figure6.The high impedance value represents a signal that has not been set to any specific value—that is,an input pin that is not connected.Forcing output waveforms to have high impedance does not affect the output simulation waveforms.Figure6.Setting a signal to high impedance.Weak Low(L)and Weak High(H)These tools are used to set a signal to the values Weak Low(L)or Weak High(H),which represents a circuit in which a bidirectional signal is pulled down or up by using a resistor.Examples are shown in Figures7and 8.Figure7.Changing the x1signal to be weak low from200to400ns.16Altera Corporation-University ProgramFigure8.Changing the x1signal to be weak high from400to600ns.InvertThis tool inverts the value of a selected waveform,as shown in Figure9.Low signals become high,weak low signals become weak high,and vice versa for both cases.The Invert tool has no effect on a signal that is set to high impedance or unknown.Figure9.Inverting the x1signal from100to260ns.Count ValueThis tool allows a waveform to be partitioned into sections,in which the value is incremented by a specified amount.The Count Value tool can only be applied to a single waveform or a grouped waveform(see sectionB.1).The options that are available when using the Count T ool are illustrated in Figure10.Figure10.Options available for for the Count Value tool.As an example,Figure11shows the3-bit input signal called count set to increment by one every100ns.Figure11.An example of using the Count Value tool.Overwrite ClockThis tool is used to generate a periodic waveform,which is often used as a clock signal.The options available when using the Overwrite Clock tool are shown in Figure12.18Altera Corporation-University ProgramFigure12.Options available for the Overwrite Clock tool.In the example of Figure13,the x3signal has been generated with a period of200ns,an offset of0ns,and a duty cycle of50%.Figure13.An exmaple of using the Overwrite Clock tool.Arbitrary ValueThis tool allows a signal to be set to an arbitrary value,which is particularly useful for specifying the value ofa multibit waveform.The options available when using the Arbitrary Value tool are shown in Figure14.Figure14.Options available for for the Arbitrary Value tool.As an example,in Figure15the count signal is set to three different arbitrary binary values as specified by theuser.Figure15.The Arbitrary Value tool is used to set values for the count signal.Random ValuesThis tool assigns random values to the selected waveform(s),with several options as shown in Figure16.Figure16.Various options available for the Random Value tool.For example,in Figure17,the signal x1has been given random values.20Altera Corporation-University ProgramFigure17.An example of the Random Value tool being used.Snap to GridThis option allows selections made with the Selection T ool to snap to the light grey grid lines running verti-cally down the waveform display.This option can be toggled on and off by pressing the Snap to Grid button.It is set to on by default.Figure18shows an example of the Selection Tool being used with the Snap to Grid option turned off.Figure18.An example of the Snap to Grid option turned off.Snap to T ransitionThis option allows the Selection Tool to automatically extend a selection to thefirst transition encountered on both sides of the selection of one or more waveforms.For example,with the Snap to T ransition option turned on,the Selection Tool rectangle shown in Figure19would be expanded to create the selections illustrated in Figure20.This option can be toggled on and off by pressing the Snap to T ransition button,and is set to off by default.Figure19.Making a selection with the Snap to T ransition option enabled.Figure20.The expanded selection resulting from Figure19.B Using Multibit SignalsThis section describes features of the Simulation Waveform Editor that are useful for dealing with multibit signals.B.1Grouping and Ungrouping SignalsIndividual signals can be grouped together to create a multibit waveform.This is done byfirst selecting the desired waveforms by clicking on their names in the leftside of the Waveform Editor with the key Ctrl pressed as indicated in Figure21.Then,as shown in thefigure,the grouping of signals is done by right-clicking on the selection and choosing Grouping>Group....22Altera Corporation-University ProgramFigure21.An example of grouping signals.In the options dialogue that opens,illustrated in Figure22,a name must be assigned to the group,as well as a radix.In the example shown,the name count has been chosen with a binary radix.The resulting group of signals is shown in Figure23.The multibit waveform can be expanded in the waveformeditor to display its individual signals.Figure23.An example of expanding a multibit signal.A multibit signal can be ungrouped by right-clicking on the group of signals and selecting Grouping>Ungroup.... It is also possible to create hierarchical groupings of signals as illustrated in Figure24.In this example,the two bit signal called level2is combined with the signal called x3to create the three bit signal called level1.It is only possible to group and ungroup top-level signals.Figure24.An example of hierarchical groups.It is also possible to group input and output signals,as shown in Figure25.24Altera Corporation-University ProgramFigure25.An example of grouping input and output signals.B.2Reverse Group or Bus Bit OrderIn Figure23,the three bit signal count is displayed as the3-tuple x1x2x3.It is possible to reverse the order in which the bits are displayed as illustrated in Figure26.This is done by right-clicking on the name of the multibit signal and selecting Reverse Group or Bus Bit Order,as seen in thefigure.Figure26.Reversing the bit order on a group of signals.The effects of the bit reversal can be seen in Figure27.The count waveform is now displayed as the3-tuple x3x2x1.Figure27.The result of reversing the bit order in Figure26.Copyright©2014Altera Corporation.26Altera Corporation-University Program。
System Modeling and Simulation
System Modeling and Simulation System modeling and simulation play a crucial role in various industries, including engineering, healthcare, finance, and many more. The process of system modeling involves creating a simplified representation of a real system, while simulation allows for the analysis of the system's behavior under different conditions. This powerful combination enables professionals to make informed decisions, optimize processes, and predict outcomes with a high degree of accuracy. From an engineering perspective, system modeling and simulation are essential for designing and testing complex systems such as aircraft, automobiles, andindustrial machinery. By creating virtual models of these systems, engineers can analyze their performance, identify potential issues, and make necessary adjustments before physical prototypes are built. This not only saves time and resources but also enhances the overall safety and reliability of the final products. In the healthcare industry, system modeling and simulation are used to improve patient care, optimize hospital operations, and advance medical research. For instance, simulation models can help healthcare providers better understand patient flow, resource allocation, and the impact of different treatment protocols. This can lead to more efficient healthcare delivery, reduced wait times, and ultimately, better patient outcomes. In the realm of finance, system modeling and simulation are employed to analyze market trends, assess risks, and develop investment strategies. Financial institutions rely on these tools to simulate various economic scenarios, stress test their portfolios, and make well-informed decisions in a rapidly changing market environment. Additionally, system modeling and simulation are integral to the development of predictive models for pricing derivatives, managing assets, and mitigating financial risks. Beyond thesespecific industries, system modeling and simulation have broader implications for society as a whole. For example, in the context of urban planning, these tools can be used to simulate traffic patterns, analyze the impact of infrastructureprojects, and optimize public transportation systems. This can lead to more sustainable and livable cities, with reduced congestion and improved accessibility for residents. Despite the numerous benefits of system modeling and simulation, there are challenges that need to be addressed. One such challenge is thecomplexity of creating accurate models that capture all relevant aspects of a system. This requires a deep understanding of the system's behavior, as well as the availability of reliable data for validation and calibration. Additionally, the computational resources required for running simulations of large-scale systems can be substantial, necessitating efficient algorithms and high-performance computing infrastructure. Furthermore, the interpretation of simulation results and the translation of findings into actionable insights can be a daunting task. It requires interdisciplinary collaboration between domain experts, data scientists, and simulation specialists to ensure that the outcomes are meaningful and applicable in real-world scenarios. Moreover, there is a need for continuous refinement and validation of simulation models to keep them relevant and accurate in dynamic environments. From a human perspective, the use of system modeling and simulation can evoke a sense of empowerment and confidence in decision-making. Professionals who leverage these tools are better equipped to anticipate challenges, explore innovative solutions, and make evidence-based choices. This can lead to a greater sense of control over complex systems and a reduced fear of the unknown, ultimately fostering a culture of continuous improvement and resilience. In conclusion, system modeling and simulation are indispensable tools that have far-reaching implications across various industries and societal domains. While they offer tremendous potential for innovation and progress, it is essential to acknowledge the challenges associated with their application and to work towards overcoming them through collaboration, innovation, and a commitment to excellence. As technology continues to advance, the future of system modeling and simulation holds great promise for shaping a more efficient, sustainable, and prosperous world.。
HowRunaSimulation(如何运行一个Repast仿真程序)

HowRunaSimulation(如何运⾏⼀个Repast仿真程序)最近做实验可能会⽤到多Agent仿真模型,经过筛选决定⽤Repast仿真程序。
先简单的介绍下Repast仿真软件。
如果您对此仿真软件⽐较熟悉,可以略过下边的简介:Repast 是Recursive Porus Agent Simulation 的缩写。
这是⼀个⽤Java开发的基于主体的模拟框架。
Repast 从Swarm 中借鉴了很多设计理念,形成⼀个“类Swarm”的模拟软件架构。
Repast 最初是由芝加哥⼤学的社会科学计算实验室开发研制的,后来俄勒岗国家实验室维护了⼀段时间,现在由来⾃政府、教育界和⾏业组织成员组成的⾮赢利机构管理.2004 年11 ⽉推出了最新版本Repast 3.0。
Repast 3.0 的核⼼部分是⼀个基于主体建模朊务内核,⽀持3 种实施平台:Java 平台的Repast J、微软.Net框架下的 、⽀持Python 脚本语⾔的Repast Py,因此它⽀持Java、Python、DotNet 三种编程接⼝。
⾼级模型需要在Repast J 中⽤Java 编写,或者在Repast .Net 中⽤C# 编写。
Repast 提供了多个类库,⽤于创建、运⾏、显⽰和收集基于主体的模拟数据,并提供了内置的适应功能,如遗传算法和回归等。
它包括上少模版和例⼦,具有⽀持完全并⾏的离散事件操作、内置的系统动态模型等诸多特点。
接下来就是先按照安装⽂件中的⽂档进⾏翻译,按部就班的进⾏学习。
希望我尽量翻译的通俗易懂。
偶的英语呀⽐较烂,⼤家看不懂请下载仿真软件进到docs⽬录直接看英⽂⽂档。
同时下边提供开源多Agent仿真软件Repast的下载地址。
⼤家可以按照⾃⼰的需要进⾏相应版本的下载以下是准备要翻译的⽬录,这个⽬录是Repast for Java 的⽂档,.NET⽂档会少⼀些,为了⽂档翻译的完整性,我会结合两者的⽂档进⾏说明,其实它们基本上差不多。
虚拟工程师的英语作文

虚拟工程师的英语作文Virtual Engineers。
With the development of technology, virtual engineering has become a significant part of many industries. Virtual engineering refers to the use of computer software and simulation technology to create and test products before they are physically built. This process can save time and money, as well as help engineers identify and solve potential problems before they arise.Virtual engineers are professionals who specialize in virtual engineering. They use computer-aided design (CAD) software to create 3D models of products, which can be tested and modified in a virtual environment. They also use simulation software to test the performance of products under different conditions, such as temperature, pressure, and stress.One of the benefits of virtual engineering is that itallows engineers to create and test products in a safe and controlled environment. For example, if a company is designing a new airplane, virtual engineers can simulate the airplane's performance in various weather conditions, such as high winds or turbulence. This can help identify potential safety issues before the airplane is built and flown.Virtual engineering can also save time and money. By testing products in a virtual environment, engineers can identify and solve problems before they arise in the physical world. This can prevent costly mistakes and delays in the production process.Another benefit of virtual engineering is that it allows engineers to collaborate more easily. Virtual engineers can work together from different locations, sharing 3D models and simulation data over the internet. This can save time and reduce the need for travel.However, virtual engineering also has its challenges. One of the biggest challenges is the need for specializedsoftware and hardware. Virtual engineers require powerful computers and expensive software to create and test 3D models and simulations. This can be a barrier for smaller companies or individual engineers.Another challenge is the need for specialized training. Virtual engineering requires a deep understanding of computer software and simulation technology. Engineers must be trained in how to use these tools effectively, as well as how to interpret the results of simulations.In conclusion, virtual engineering is a valuable tool for many industries. It allows engineers to create and test products in a safe and controlled environment, saving time and money. However, it also has its challenges, such as the need for specialized software and training. As technology continues to advance, virtual engineering will likely become even more important in the years to come.。
Advanced Circuit Simulation软件用户指南说明书

.SNNOISERuns periodic AC noise analysis on nonautonomous circuits in a large-signal periodic steady state..SNNOISE output insrc frequency_sweep [N1, +/-1]+ [LISTFREQ=(freq1 [freq2 ... freqN ]|none|all]) [LISTCOUNT=num ]+ [LISTFLOOR=val ] [LISTSOURCES=on|off].HBAC / .SNACRuns periodic AC analysis on circuits operating in a large-signal periodic steady state..HBAC frequency_sweep .SNAC frequency_sweep.HBXF / .SNXFCalculates transfer function from the given source in the circuit to the designated output..HBXF out_var frequency_sweep .SNXF out_var frequency_sweep.PTDNOISECalculates the noise spectrum and total noise at a point in time..PTDNOISE output TIME=[val |meas |sweep ] +[TDELTA=time_delta ] frequency_sweep+[listfreq=(freq1 [freq2 ... freqN ]|none|all)] [listcount=num ]+[listfloor=val ] [listsources=on|off]RF OptionsSIM_ACCURACY=x Sets and modifies the size of the time steps. The higher the value, thegreater the accuracy; the lower the value, the faster the simulation runtime. Default is 1.TRANFORHB=n 1 Forces HB analysis to recognize or ignore specific V/I sources, 0 (default) ignores transient descriptions of V/I sources.HBCONTINUE=n Specifies whether to use the sweep solution from the previous simulation as the initial guess for the present simulation. 0 restarts each simulation in a sweep from the DC solution, 1 (default) uses the previous sweep solution as the initial guess.HBSOLVER=n Specifies a preconditioner for solving nonlinear circuits. 0 invokes the direct solver. 1 (default) invokes the- matrix-free Krylov solver. 2 invokes the two-level hybrid time-frequency domain solver.SNACCURACY=n Sets and modifies the size of the time steps. The higher the value, the greater the accuracy; the lower the value, the faster the simulation runtime. Default is 10.SAVESNINIT=”filename ” Saves the operating point at the end of SN initialization.LOADSNINIT=”filename ” Loads the operating point saved at end of SN initialization.Output Commands.BIASCHK .MEASURE .PRINT .PROBEFor details about all commands and options, see the HSPICE ® Reference Manual: Commands and Control Options.Synopsys Technical Publications 690 East Middlefield Road Mountain View, CA 94043Phone (650) 584-5000 or (800) Copyright ©2017 Synopsys, Inc. All rights reserved.Signal Integrity Commands.LINCalculates linear transfer and noise parameters for a general multi-port network..LIN [sparcalc [=1|0]] [modelname=modelname ] [filename=filename ]+ [format=selem|citi|touchstone|touchstone2] [noisecalc [=1|0]]+ [gdcalc [=1|0]] [dataformat=ri|ma|db]+ [listfreq=(freq1 [freq2 ... freqN ]|none|all)] [listcount=num ]+ [listfloor=val ] [listsources=1|0|yes|no].STATEYEPerforms Statistical Eye Diagram analysis..STATEYE T=time_interval Trf=rise_fall_time [Tr=rise_time ] + [Tf=fall_time ] Incident_port=idx1[, idx2, … idxN ]+ Probe_port=idx1[, idx2, … idxN ] [Tran_init=n_periods ] + [V_low=val ] [V_high=val ] [TD_In=val ] [TD_PROBE=val ]+ [T_resolution=n ] [V_resolution=n ] [VD_range=val ]+ [EDGE=1|2|4|8] [MAX_PATTERN=n ] [PATTERN_REPEAT=n ] + [SAVE_TR=ascii] [LOAD_TR=ascii] [SAVE_DIR=string ]+ [IGNORE_Bits=n ] [Tran_Bit_Seg=n ]+ [MODE=EDGE|CONV|TRAN] [XTALK_TYPE = SYNC|ASYNC|DDP|NO|ONLY]+ [Unfold_Length=n ] [TXJITTER_MODE = 1|2]RF Analysis Commands.ACPHASENOISEHelps interpret signal and noise quantities as phase variables for accumulated jitter for closed-loop PLL analysis..ACPHASENOISE output input [interval ] carrier=freq+ [listfreq=(freq1 [freq2 ... freqN ]|none|all)][listcount=num ]+ [listfloor=val ] [listsources=1|0].HBRuns periodic steady state analysis with the single and multitone Harmonic Balance algorithm..HB TONES=F1[,F2,…,FN ] [SUBHARMS=SH ] [NHARMS=H1[,H2,…,HN ]]+ [INTMODMAX=n ] [SWEEP parameter_sweep ].SNRuns periodic steady state analysis using the Shooting Newton algorithm..SN TRES=Tr PERIOD=T [TRINIT=Ti ] [MAXTRINITCYCLES=integer ]+ [SWEEP parameter_sweep ] [NUMPEROUT=val ].SN TONE=F1 [TRINIT=Ti ] NHARMS=N [MAXTRINITCYCLES=integer ]+ [NUMPEROUT=val ] [SWEEP parameter_sweep ].HBOSC / .SNOSCPerforms analysis on autonomous oscillator circuits..HBOSC TONE=F1 NHARMS=H1+ PROBENODE=N1,N2,VP [FSPTS=NUM,MIN,MA X]+ [SWEEP parameter_sweep ] [SUBHARMS=I ] [STABILITY=-2|-1|0|1|2].SNOSC TONE=F1 NHARMS=H1 [TRINIT=Ti ]+ [OSCTONE=N ] [MAXTRINITCYCLES=N ]+ [SWEEP parameter_sweep ].PHASENOISEInterprets signal / noise quantities as phase variables for accumulated jitter in closed-loop PLL analysis..PHASENOISE output frequency_sweep [method= 0|1|2]+ [listfreq=(freq1 [freq2 ... freqN ]|none|all)] [listcount=num ]+ [listfloor=val ] [listsources=1|0] [carrierindex=int ].HBNOISEPerforms cyclo-stationary noise analysis on circuits in a large-signal periodic steady state..HBNOISE output insrc parameter_sweep [N1, N2, ..., NK ,+/-1]+ [LISTFREQ=(freq1 [freq2 ... freqN ]|none|all]) [LISTCOUNT=num ]+ [LISTFLOOR=val ] [LISTSOURCES=on|off].NOISERuns noise analysis in frequency domain..NOISE v(out ) vin [interval ] [listckt[=1|0]]+ [listfreq=freq1 [freq2 ... freqN ]|none|all]) [listcount=num ]+ [listfloor=val ] [listsources=1|0|yes|no]] [listtype=1|0].ALTERReruns a simulation using different parameters and data from a specified sequence or block. The .ALTER block can contain element commands and .AC, .ALIAS, .DATA, .DC, .DEL LIB, .HDL, .IC (initial condition), .INCLUDE, .LIB, .MODEL, .NODESET, .OP, .OPTION, .PARAM, .TEMP, .TF, .TRAN, and .VARIATION commands..ALTER title_string.DCPerforms DC analyses..DC var1 START=start1 STOP=stop1 STEP=incr1Parameterized Sweep.DC var1 start1 stop1 incr1 [SWEEP var2 type np start2 stop2].DC var1 START=[par_expr1] STOP=[par_expr2] STEP=[par_expr3]Data-Driven Sweep.DC var1 type np start1 stop1 [SWEEP DATA=datanm (Nums )].DC DATA=datanm [SWEEP var2 start2 stop2 incr2].DC DATA=datanm (Nums )Monte Carlo Analysis.DC var1 start1 stop1 incr1 [SWEEP MONTE=MCcommand ].DC MONTE=MCcommand.OPCalculates the operating point of the circuit..OP format_time format_time ... [interpolation].PARAMDefines parameters. Parameters are names that have associated numeric values or functions..PARAM ParamName = RealNumber | ‘AlgebraicExpression’ | DistributionFunction (Arguments ) | str(‘string’) | OPT xxx (initial_guess, low_limit, upper_limit )Monte Carlo Analysis.PARAM mcVar = UNIF(nominal_val , rel_variation [, multiplier ]) | AUNIF(nominal_val , abs_variation [, multiplier ])| GAUSS(nominal_val , rel_variation , num_sigmas [, multiplier ]) | AGAUSS(nominal_val , abs_variation , num_sigmas [, multiplier ]) | LIMIT(nominal_val , abs_variation ).STOREStarts creation of checkpoint files describing a running process during transient analysis..STORE [file=checkpoint_file ] [time=time1]+ [repeat=checkpoint_interval ].TEMPPerforms temperature analysis at specified temperatures..TEMP t1 [t2 t3 ...].TRANPerforms a transient analysis.Single-Point Analysis.TRAN tstep1 tstop1 [START=val ] [UIC]Multipoint Analysis.TRAN tstep1 tstop1 [tstep2 tstop2 ... tstepN tstopN ]+ RUNLVL =(time1 runlvl1 time2 runlvl2...timeN runlvlN )+ [START=val ] [UIC] [SWEEP var type np pstart pstop ]Monte Carlo Analysis.TRAN tstep1 tstop1 [tstep2 tstop2 ... tstepN tstopN ]+ [START=val ] [UIC] [SWEEP MONTE=MCcommand ]Invoking HSPICESimulation Modehspice [-i] input_file [-o [output_file ]] [-hpp] [-mt #num ][-gz] [-d] [-case][-hdl filename ] [-hdlpath pathname ] [-vamodel name ]Distributed-Processing Modehspice [-i] input_file [-o [output_file ]] -dp [#num ][-dpconfig [dp_configuration_file ]] [-dplocation [NFS|TMP][-merge]Measurement Modehspice -meas measure_file -i wavefile -o [output_file ]Help Modehspice [-h] [-doc] [-help] [-v]Argument Descriptions-i input_file Specifies the input netlist file name.-o output_file Name of the output file. HSPICE appends the extension .lis.-hpp Invokes HSPICE Precision Parallel.-mt #num Invokes multithreading and specifies the number of processors. Works best when -hpp is used.-gz Generates compression output on analysis results for these output types: .tr#, .ac#, .sw#, .ma#, .mt#, .ms#, .mc#, and .print*.-d (UNIX) Displays the content of .st0 files on screen while running HSPICE.-case Enable case sensitivity.-hdl filename Specifies a Verilog-A file.-hdlpath pathname Specifies the search path for Verilog-A files.-vamodel name Specifies the cell name for Verilog-A definitions.-dp #num -dpconfig dpconfig_file -dplocation [NFS|TMP] Invokesdistributed processing and specifies number of processes, the configuration file for DP, and the location of the output files.-merge Merge the output files in the distributed-processing mode.-meas measure_file Calculates new measurements from a previous simulation.-h Outputs the command line help message.-doc Opens the PDF documentation set for HSPICE (requires Adobe Acrobat Reader or other PDF document reader).-help Invokes the online help system (requires a Web browser).-v Outputs HSPICE version information.HSPICE is fully integrated with the Synopsys® Custom Compiler™ Simulation and Analysis Environment (SAE). See the Custom Compiler™ Simulation and Analysis Environment User Guide .To use the HSPICE integration to the Cadence® Virtuoso® Analog Design Environment, go to /$INSTALLDIR/interface/ and follow the README instructions.Analysis Commands.ACPerforms AC analyses.Single / Double Sweep.AC type np fstart fstop.AC type np fstart fstop [SWEEP var+ [START=]start [STOP=]stop [STEP=]incr ].AC type np fstart fstop [SWEEP var type np start stop ]Sweep Using Parameters.AC type np fstart fstop [SWEEP DATA=datanm (Nums )].AC DATA=datanm.AC DATA=datanm [SWEEP var [START=]start [STOP=]stop [STEP=]incr ].AC DATA=datanm [SWEEP var type np start stop ]Monte Carlo Analysis.AC type np fstart fstop [SWEEP MONTE=MCcommand ].LSTBInvokes loop stability analysis..LSTB [lstbname ] mode=[single|diff|comm + vsource=[vlstb |vlstbp,vlstbn ]Data-Driven Sweep.TRAN DATA=datanm.TRAN DATA=datanm [SWEEP var type np pstart pstop ].TRAN tstep1 tstop1 [tstep2 tstop2 ... tstepN tstopN ]+ [START=val ] [UIC] [SWEEP DATA=datanm (Nums )]Time Window-based Speed/Accuracy Tuning by RUNLVL.TRAN tstep tstop [RUNLVL=(time1 runlvl1...timeN runlvlN )]Circuit Block-based Speed/Accuracy Tuning by RUNLVL.TRAN tstep tstop+ [INST=inst_exp1 RUNLVL=(time11 runlvl11...time1N runlvl1N )]+ [SUBCKT=subckt_exp2 RUNLVL=(time21 runlvl21...time2N runlvl2N )]Time Window-based Temperature Setting.TRAN tstep tstop [tempvec=(t1 Temp1 t2 Temp2 t3 Temp3...)+[tempstep=val ]].TRANNOISEActivates transient noise analysis to compute the additional noise variables over a standard .TRAN analysis..TRANNOISE output [METHOD=MC] [SEED=val ] [SAMPLES=val ] [START=x ]+ [AUTOCORRELATION=0|1|off|on] [FMIN=val ] [FMAX=val ] [SCALE=val ]+ [PHASENOISE=0|1|2] [JITTER=0|1|2] [REF=srcName ] [PSD=0|1]HSPICE Options.OPTION opt1 [opt2 opt3 …]opt1 opt2 … Specify input control options.General OptionsALTCC=n Enables reading the input netlist once for multiple .ALTER statements. Default is 0.LIS_NEW=x Enables streamlining improvements to the *.lis file. Default is 0. SCALE=x Sets the element scaling factor. Default is 1.POSTTOP=n Outputs instances up to n levels deep. Default is 0.POSTLVL=n Limits data written to the waveform file to the level of nodes specified by n .POST=n Saves results for viewing by an interactive waveform viewer. Default is 0.PROBE=n Limits post-analysis output to only variables specified in .PROBE and .PRINTstatements. Default is 0.RC Reduction OptionsSIM_LA=name Starts linear matrix (RC) reduction to the PACT, PI, or LNE algorithm. Defaultis off.Transient OptionsAUTOSTOP=n Stops transient analysis after calculating all TRIG-TARG, FIND-WHEN, andFROM-TO measure functions. Default is 0.METHOD=name Sets numerical integration method for a transient analysis to GEAR, or TRAP(default), or BDF.RUNLVL=n Controls the speed and accuracy trade-off; where n can be 1 through 6. The higher the value, the greater the accuracy; the lower the value, the faster the simulation runtime. Default is 3.Variability and Monte Carlo Analysis.AC .DC .TRAN .MEASURE .MODEL .PARAM .ACMATCHCalculates the effects of variations on the AC transfer function, with one or more outputs..ACMatch Vm(n1) Vp(n1) Vr(n1) Vi(n1) Vm(n1,n2) Im(Vmeas ).DCMATCHCalculates the effects of variations on the DC operating point, with one or more outputs..DCMatch V(n1) V(n1,n2) I(Vmeas )。
Arena Simulation 模拟仿真案例
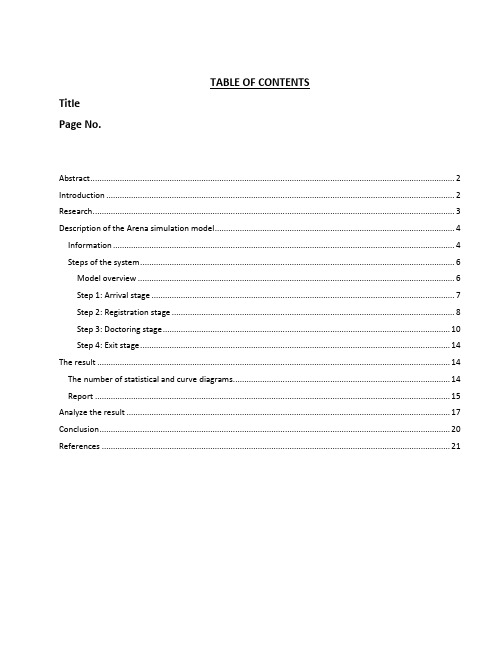
TABLE OF CONTENTSTitle Page No.Abstract (2)Introduction (2)Research (3)Description of the Arena simulation model (4)Information (4)Steps of the system (6)Model overview (6)Step 1: Arrival stage (7)Step 2: Registration stage (8)Step 3: Doctoring stage (10)Step 4: Exit stage (14)The result (14)The number of statistical and curve diagrams (14)Report (15)Analyze the result (17)Conclusion (20)References (21)AbstractThe medical effectiveness and efficiency is an important index to measure the merits and demeritsof a hospital, which means that a good medical institution should not only have superior professional skill, but also have efficient and high-quality services. But in many smaller and older hospital or clinics, the long queue and outdated equipments are common issues. This model using Arena software is designed to improve these problems. First, a model is established to simulate a certain clinic that only have tradition artificial registration ways and some outdated equipment, and then the self-service equipment registration and the online registration are added into initial model, and more advanced medical devices also are added to assist in diagnosing patients for some complex diseases, which can reduce the diagnosis time of patients and the pressure of doctors. In addition, we will discuss the results, through comparing the original operational data (without self-service registration) with new system (including the self-service registration), we can further analyze the feasibility of the application and draw a conclusion.Key words: hospital, self-service, simulation system, Arena.IntroductionWith the growth of population and the development of science and technology, the health care industry has also improved greatly. Many of the most advanced medical devices have been applied to treatment and testing, which improves the efficiency and accuracy of doctors, and Internet technology is also used in many programs, some new, large-scale hospitals or clinics not only have an advantage in medical effects, but also give people a better experience in terms of service quality, medical environment and other details. Although they are more expensive, they still attract a lot of patients with a variety of advantages. But some of the smaller or older hospitals or clinics are facing many problems about capital, resource, efficiency and so on. For example, insufficient resources cannot meet the growing number of patients, a small number of outdated devices that can't meet the current physical therapy level. In order to solve these problems, there are two common ways, one is to expand the hospital directly with a large amount of money, but most of these hospitals cannot afford it, the other is to improve their medical facilities on the existing conditions, thereby matching the current needs, and the second method is the better way more medical institutions choose.ResearchAccording some researches, many of medical institutions’ work hours are from 8 a.m. to 5 p.m., and the busy hours is between 9.00 and 11.00 a.m. and 13.00 and 15.00 p.m., and the lunch time is between 11 a.m. and 1p.m..For the online registry and self-service by equipments, because they have some shortcomings, they do not have the face-to-face counseling and have more complex procedures, so these forms of service cannot completely replace artificial registration. However, some people who are familiar with the medical procedure or feel it is too long of queues of the artificial registration will be willing choose these forms of registration.About medical equipments, in recent years, advanced medical devices have been designed to be more efficient and smaller, shorter applications and high automation, which make it very practical, convenient, accurate and so on. So superior hospitals usually use advanced equipment to assist doctors, which also makes hospitals more competitive.In addition, a patient who goes to the doctor usually needs several times such as initial diagnosis, rediagnosis, buying medicine and so on. Therefore, the patient will choose the next process in a certain proportion after the diagnosis.This table summarizing above informationDescription of the Arena simulation modelThis model simulates the working mode of a small clinic base on some research data and hypothesis parameters. The workflow of the model: Arrival – Registration – Waiting doctor – diagnosis –Payment – Lab – Medicine – Exit.InformationArrival distributionInter-arrival rate: Random Exponential distribution with a mean of 5 minutesArrival during busy hours (9.00-11.00 a.m.): constant with 1 person/2 minutesArrival during busy hours (13.00-15.00 p.m.): constant with 1 person/2 minute Resources:According to some factors like lunch time, the resource value and resource types are set by different condition in the model.Schedule:Setting the schedule depend on allocation of resources. Take the doctor 1 for example. The time from 11.00 a.m. to 12.00 noon is the lunch hour, so the value is set to be 0 during this time.Queue:Because some patients need a repeat queue, so some assignments are used to set priority queue levels for some entities and processes apply the corresponding rules in a particular queue.Assignment:Some principles are assigned at some points in order to ensure the system to meet actual situations.Steps of the system Model overviewLayout a clinicStep 1: Arrival stageThe first stage is mainly used to set the entity arrival form and the time limit. The parameter settings are shown in the picture below.Step 2: Registration stageStep2.1This stage is to set the registration method selection. According to the parameter settings in the below picture, the patient selects the registration method. When the number of the queue of an artificial registration is more than 2, the patient needs to choose the self-service ways.Step 2.2This stage shows registering processes, there are two original artificial registration processes and new extra two registration methods, self-service equipments and online registration. The parameter settings are shown in the picture below.Step 3: Doctoring stageStep 3.1When the second stage is completed, people need to go to the waiting area first, which is the area in which queues are generated due to the limited resources of doctors. When there is no waiting queue in the waiting area, the patient goes directly to the doctor's offices, but if there is a queue in this process, the patient needs to join the queue for waiting resources to be released. The values are shown in the picture below.Step 3.2In this station, the number of waiting each doctor is limited to 2. If there are no spaces in the queues, patients need to go to the waiting area.Step 3.3This stage is the main stage of diagnosis, and the parameter settings of the three branches are same. The branch of doctor 1 will be described as a representative.Step 3.4This is the final stage of doctoring including four parts payment, lab, taking medicine, leaving directly, and the special part is the doing my lab , when this process is over, the patient needs to go back to the previous doctor's office, so it is needed to set the patient's waiting priority as high.Step 4: Exit stageThis is the final stage, people will leave and the simulation system finish.The resultThe number of statistical and curve diagramsReportWIP (the mean number of entities in the system)Queue of processes in the systemResources used in the systemAnalyze the resultDuring the nine hours of the system was running, 214 patients arrive, and 62 patients register by the self-services and 54 patients do a lab, which indicate that the self-service play an important role. By canceling the self-service registration methods to change the model to original registration ways, different data will be got. Comparing this data with improving system’s date, we can find that when there is not self-service, the waiting time of queues of artificial registrations is relatively long, 24.93 and 17.53 minutes, while the system add the self-service, the time becomes short, 2.98 and 1.06 minutes. When the clinic does not add the self-service registration ways, and under presumably same average process time (14.53 and 14.38 minutes), the average waiting time of each entity in the clinic is 38.39 minutes and the average total time is 61.92 minute, but in the adding self-service registration system, they are 12.9 and 36.09 minutes respectively. So it can be determined that adding the self-service registration system can reduce the waiting time of patients, and make the process of medical care shorter.ConclusionBased on above analysis, when the simulation model of a clinic adds the self-service registration, under the same average time of process, the waiting time becomes shorter. Although the utilization rate of two employees working at the registration desk has been reduced, the waiting time is considered to be an important issue impacting the service quality of the clinic. And the investment is very less than adding more employees.In this model, the result does not directly respond the effect of adding new medical devices used to assist in doctors, but because of these devices, when the improving model was established, the value of the process of doctor was set to be shorter. In other words, more advanced medical equipments mean less time spend on diagnosis and more patients coming. In fact, the self-service and advanced equipments have a lot of benefits for both internal and external aspects of a hospital or clinic. For the internal aspect, it not only can improve work efficiency and accuracy, but also reduce the pressure of employees, and for the external aspect, it can raise the reputation of a medical institution, and attract more people, which will bring more profits.Sum up, the simulation model provide a good way to help some hospitals or clinics to analyze and perfect their service quality.Lab exam Spring 2020 References[1]. Chinese Journal of Modern Medicine, Mar 2018.[2].Google research - Google map – Clinics in Dubai[3].Book: Kelton, W.D., Sadowski, R.P., and Sturrock, D.T: Simulation with Arena, Fourth Edition, 2007, McGraw Hill (with limited student edition of Arena on CD-Rom).[4].In a computer where Arena installed, use the following path: Start/Programs/Rockwell Software/Arena/Online Books Very useful examples are available when you opened Arena in a computer and use the help. You can use Arena help and Arena SMART files from the help menuModeling of Engineering Management Systems Page 21。
Fusion Simulation软件使用指南说明书

MFG226585Become a Fusion Simulation Expert in 60 MinutesDr. Shekar SubAutodesk IncDescriptionFusion Simulation software offers a rich set of analysis types to simulate real-world problems. Whether it’s simple static stress, optimizing a shape to reduce weight, or simulating a bird hitting an airplane, it’s all there. One of the biggest challenges is to set up the simulation properly so the results are reasonable. Interpretation of results to selecting the best alternative for manufacturing is another challenge. While demystifying simulation with tips and tricks from community forums, we will also highlight the pitfalls one needs to avoid. Collaboration and knowledge sharing is key to mastering simulation tools.Speaker(s)Shekar is a long timer of Autodesk and was recently the lead for Fusion Simulation. He has worked on various products at Autodesk like MDT, Inventor, and Fusion. He is one of the authors of the book, "Mastering Autodesk Inventor 2009 and Autodesk LT 2009", Wiley Publishing. His educational background includes bachelors, masters and doctorate degrees in mechanical engineering. He completed the Advanced Certificate for Executives in Management, Innovation & Technology program at Sloan School of management, Massachusetts Institute of Technology, Boston. He teaches classes at Autodesk University and is a frequent contributor to the Fusion Community forum. He volunteers for the FIRST robotics programs.IntroductionA vast amount of knowledge exists on the internet on Fusion Simulation. Youtube has videos about Fusion Simulation that are very helpful. Instead of rewriting a whole new handout I’m providing links about Fusion Simulation.Figure 1: Simulation StepsAbout Fusion360 Simulation: Learn as to why you need to do simulation and the value behind it.Figure 2: Fusion Simulation User InterfaceThe Simulation toolbar is a good starting place to familiarize yourself with all the commands needed for Simulation analysis.1. SimplificationRemove any unneeded geometry for your simulation. During this phase, strategize and plan to figure out what geometry needs to remain in the model for simulation.•Unneeded Fillets•Embossed Text•Actual threads•Leverage symmetry•Consider body/components that could be approximated by point massesFigure 3: Base Model, Simulation models and studies2. StudiesFigure 4: Simulation studiesThere are 8 different studies that you can select from to do your analysis. This provides step-by-step procedure to setup an LSS analysis. Tip: Create & then Edit• 2.1 How to create a study?• 2.2 Static Stress• 2.3 Modal frequencies• 2.4 Structural Buckling• 2.5 Thermal:• 2.6 Thermal Stress• 2.7 Shape Optimization• 2.8 Non Linear Static Stress• 2.9 Event SimulationFigure 5: Main study types3. MaterialsSimulation Materials may be different than Model materials. You can create your own custom material.Tip: Ctrl to add rows in Study Materials dialog. Shift to select a bunch of rows. RMB on a material in the browser to access the Study Materials command, all components that use the same material are automatically preselected4. ConstraintsFigure 6: Constraint typesTo restrict the model to a particular location apply Constraints. Apply any of the four different constraints. Tip: In some situations, partially constrain the model and use the Remove rigid body modes option. Solver will apply an acceleration load to keep model statically stable. 5. LoadsFigure 7: Main Load typesHow much load does the model need to resist? Apply any of the six different Structural Loads needed for your simulation.• 5.1 Load Cases Study different load cases and evaluate how the model performs. Tip: Double-click activates a load case. Cannot have 0 LCs• 5.2 How to assign a point mass: Substitute geometry with a point-mass or create a point mass to idealize non-created geometry. Tip: Which input field corresponds to which offset direction? Drag a manipulator arrow. Then, notice which Distance field has achanging value while you are dragging the arrow.• 5.3 How to assign global loads(Linear, Angular):Learn how to apply linear acceleration, angular velocity, and angular acceleration loads.6. ContactsFigure 8: Contact types and their propertiesLoads need to transfer across bodies so run Automatic contacts and create manual contacts where necessary.Figure 9: A comparison of different types of contacts7. MeshingFigure 10: Element typesGood quality Meshing is key to produce good results. Understanding node and element types.Figure 11: Aspect ratio and maximum turn angle 8. Pre-CheckFigure 12: Pre-check warnings and their meanings Pre-check your studies before Solving and saves time.9. SolveFigure 13: Solve dialog•9.1: Solve dialog: One stop dialog to do local or cloud solves. Also manage cloud credits. Tip: To resolve a solved study, uncheck and check the checkbox next to a load or constraint. No CC charged for cancelled solves. You can only cancel 1 job at a time•9.2: Solve Status: Display status of simulation jobs•9.3: Solve Details: Details of mesh for troubleshooting10. ResultsFigure 14: Results legendVisualize results Tip: You can specify the desired result on which to base the convergence test regardless of whether you are using a refinement preset or custom settingsFigure 15: Result types for various types of studies10.1 : Display10.2 : Animate10.3 : Display Minimum and Maximum value labels10.4 : Create Slice Plane10.5 : Surface Probes10.6 : Point Probes10.7 : Legend10.8 : Reactions10.9 : Deformation Scale10.10 : Comparing Simulation Results10.11 : Results DetailsFigure 16: Safety factor resultTip: A safety factor of <=1.0 means it will fail and not good. For example, an elevatorshould be designed using higher safety factors than a bracket used to mount a camera.Tip: Contact Pressure results are generated only where Separation contact is defined between two adjacent parts of a model. Contact pressure results are not computed for any other contact type (such as Bonded, Rough, or Sliding).Figure 17: Result detailsTip: Use Dynamic Content (Javascript) option which provides collapsible sectionsTip: Compare workspace available after results generationCompare workspace video11. ConclusionHere is a link for tutorials hands-on exercises.DemoFigure 18: LSS and SO studies demo •How create a Static Stress Analysis and Solve?•How to create a Shape Optimization study and Solve?。
PSS Analysis User Guide

Virtuoso Spectre Circuit Simulator RF Analysis User Guide, ProductVersion 7.0.1BUsing PSS Analysis EffectivelyPeriodic steady-state (PSS) analysis is a prerequisite for all periodicsmall-signal analyses such as the Periodic AC (PAC), Periodic Transfer Function (PXF), Periodic S-Parameter (PSP) and Periodic Noise (Pnoise) analyses provided by Virtuoso® Spectre® circuit simulator RF analysis (Spectre RF). PSS provides a rich set of parameters to help you adapt it to your own applications. For most circuits, PSS converges with the default parameter values. However, for some difficult circuits, changing the values of some parameters is necessary to achieve convergence.This appendix describes methods you can use to remedy nonconvergence. This appendix also tells you how to improve convergence and efficiency using hierarchical PSS runs.This appendix is divided into the following three main sections: "General Convergence Aids" describes techniques you can use to resolve PSS nonconvergence with both driven and autonomous circuits "Convergence Aids for Oscillators" describes techniques you use only with autonomous circuits such as oscillators"Running PSS Analysis Hierarchically" describes how to run a sequence of PSS analyses to improve the convergence, efficiency, and quality of the PSS solution used in subsequent periodic small-signal analysesGeneral Convergence AidsYou can use the convergence aids described in this section to remedy PSS nonconvergence with driven as well as autonomous circuits. Autonomous circuits are usually harder to converge than driven circuits.Adjusting the steadyratio and tstab ParametersYou can converge most difficult circuits by manipulatingthe steadyratio and tstab parameters.The steadyratio parameter guards against false convergence. However, in unusual situations, the default value for steadyratio might be tooconservative (1.0e-3 is the default).The PSS convergence criteria (for voltage-valued variables) is roughlyTo solve the periodic steady-state problem, Spectre RF simulation replaces the time derivatives in the one-period time interval with discrete differences. This turns the nonlinear, continuous differential equations into a set of discrete nonlinear equations that the Spectre RF simulator can solve.The steadyratio parameter specifies the accuracy requirements for thediscrete system. The discrete system might have its own solution (a steady state of the discrete difference equations) independent of what is happening in the continuous limit. In other words, the discrete system might be solved to zero tolerance. This happens frequently, particularly in driven circuitswhich is why setting a conservative steadyratio value generally works quitewell.In some cases, however, the solution to zero tolerance might not occur oscillators seem to be especially problematic. Avoid setting the convergence tolerance too tightly. For example,if reltol = 1.0e-6 and steadyratio = 1.0e-3, the relative tolerance for solving the discrete system is approximately reltol ×steadyratio = 1.0e-9. This tolerance level approaches the limit of precision the simulator canprovide. In this situation, loosen steadyratio to 1.0 or 0.1 and reduce the precautions against false convergence.Providing a larger value for tstab usually improves convergence. Occasionally, you must set tstab to a value equal to or greater than the time needed for the circuit to reach approximate steady state.Additional Convergence AidsBelow is a list of additional suggestions that sometimes help convergence.∙Carefully evaluate and resolve any notice, warning, or error messages.∙While trapezoidal rule ringing is simply annoying in transient analysis, in PSS analysis it can cause the shooting iteration tostall before convergence is achieved. You can remedy thisproblem by changing the PSS options method parameterfrom traponly to either trap, gear2, or gear2only.∙Help convergence by increasing the maxperiods parameter to increase the maximum iterations for shooting method to use.Sometimes a PSS analysis might simply need more than thedefault number of iterations to converge. However, in somesituations convergence does not occur regardless of the numberof iterations. In this case, increasing the iteration limit simplycauses the simulation to take longer to fail.∙Decrease the maximum allowed time step to help convergence.To adjust the time step, either decrease the maxstep parameteror increase the maxacfreq parameter.∙Use the errpreset parameter properly. Use liberal for digital circuits; use moderate for typical analog circuits;use conservative for sensitive analog circuits (for example,charge storage circuits).Convergence Aids for OscillatorsOscillator circuits are usually harder to converge than their drivencounterparts. In addition to manipulating the steadyratio parameter, as discussed in "General Convergence Aids", set the tstab parameter largeenough so that the oscillation amplitude increases almost to its steady-state value and most other transients die out. You can estimate the required valueof tstab by performing a transient analysis, or in the PSS analysis itself,set saveinit = yes.For some circuits, the oscillation might die out before the oscillator builds up a final value, or the circuit might oscillate temporarily but then return to azero state. Setting saveinit = yes lets you view the initial transientwaveforms to identify the problem. This problem might be due to difficulty in starting the oscillator, or it might be caused by artificial numerical losses introduced by very large time steps. The latter is particularly likely if you setthe method parameter to gear2only, gear2, or euler. In this case, you might try using method = traponly. If the problem persists, force the simulator to use smaller step sizes by decreasing reltol or by settingthe maxstep parameter.With autonomous PSS analysis, exclusive use of the trapezoidal rule can lead to ringing that spans the length of the oscillation period and causes convergence problems. When you set method = trap, the Spectre RF simulator occasionally takes a backward Euler step, which acts to damp the ringing. The gear2 and gear2only methods use Gear's backward difference method, which is not subject to ringing. Each of these alternativesto traponly avoids trapezoidal rule ringing and the attendant convergenceproblems at the expense of adding a small amount of artificial numerical damping. This damping slightly reduces the computed Q of the oscillator. Be sure that the method you choose to start your oscillator is effective. It must kick the oscillator hard enough to start the oscillation and make the oscillator respond with a signal level that is between 25 and 100 percent of the expected final level. Avoid kicking the oscillator so hard that it responds in an unnecessarily nonlinear fashion. Also try to avoid exciting response modes in the circuit that are unrelated to the oscillation, especially those associated with long time constants.Try to improve your estimate of the period. The simulator uses your estimate of the period to determine the length of the initial transient analysis interval. This interval is used to measure the oscillation period. If you specify a period that is too short, the estimate of the oscillation period is not accurate, and the PSS analysis might fail. Overestimation of the period is not a serious problem because the only disadvantage is a longer initial transient interval. However, significant overestimation can result in an excessively long simulation time.Sometimes the analysis might need more than the default number of iterations (maxperiods = 50) to converge. This is more likely to occur with high-Q circuits. You can increase the maximum iterations for shooting methods using the maxperiods parameter.Running PSS Analysis HierarchicallyFor most circuits, a single PSS analysis run is sufficient to find the periodic steady-state solution. However, for some difficult circuits it is preferable, or even necessary, to run PSS analysis multiple times to find the steady-state solution with the parameter settings you want (for example, with atight reltol).The biggest obstacle to PSS convergence is poorly chosen initial conditions. The backbone of PSS analysis is Newton's method. Theoretically, when the initial guess is close enough to the solution and the problem is notill-conditioned, Newton's method is guaranteed to converge because of itscontraction property. Consequently, it is very important to provide the best initial conditions that you can to ensure rapid convergence.To run PSS hierarchically, you1. Start by running a minimally accurate PSS analysis to obtain,with high likelihood, a coarse-grid solution that converges inan acceptably short simulation time.2. Use the coarse-grid solution as the initial condition for anotherPSS run to achieve a fine-grid solution.3. This practice significantly increases the chance that thefine-grid PSS analysis converges promptly. As you mightexpect, it is also more efficient. Running PSS hierarchicallyoften reduces the total simulation time needed to find aperiodic steady-state solution because it reduces the number oftime-consuming fine-grid PSS iterations.The writefinal and readic parameters serve as threads between hierarchical PSS runs.∙When you set writefinal to SomeFileName, both theassociated time and period information (for autonomous PSS)and the final transient solution at PSS steady-state are saved tothe file, SomeFileName.∙When you run another similar PSS analysis and youset readic to SomeFileName and skipdc to yes,setting skipdc to yes forces the simulator to use the initialconditions in the file SomeFileName as the initial transientsolution for the first PSS iteration.For example, if you want to find the periodic steady-state solution with a tight reltol such as 1.0e-5, you might∙Run an initial PSS analysis with a looser tolerance; forexample, reltol = 1.0e-3∙Use the writefinal parameter in the initial PSS analysis to write out the final results to a file. A PSS analysis runs fasterwith the looser tolerance because fewer time points aregenerated during each transient integration performed duringeach PSS iteration.∙Run a second PSS analysis with the tightertolerance, reltol = 1.0e-5∙Use the readic and skipdc in the second PSS analysis to read in the final results of the first PSS analysis as the initialconditions.∙After the second PSS analysis, you can run small-signalanalyses such as PAC.set1 set reltol=1.0E-3pss1 pss ... writefinal="SomeFile"set2 set reltol=1.0E-5pss2 pss ... readic="SomeFile" skipdc=yes... pac ... ...Always use a sequence of PSS runs when a you need a tight tolerance PSS solution. If necessary, you can run more than two PSS analyses in the hierarchical process. You choose the tolerance sequence for the continuation. The multiple PSS approach usually produces a better periodic steady-state solution for subsequent small-signal analyses. The above procedure is often called a continuation on the simulation parameter reltol. However, you can use continuation with many other simulation parameters. For example, in order to achieve PSS convergence at a high input power that causes nonconvergence, you might gradually increase the input power at an RF port.。
Glider Flying Handbook说明书
Glider Flying Handbook2013U.S. Department of TransportationFEDERAL AVIATION ADMINISTRATIONFlight Standards Servicei iPrefaceThe Glider Flying Handbook is designed as a technical manual for applicants who are preparing for glider category rating and for currently certificated glider pilots who wish to improve their knowledge. Certificated flight instructors will find this handbook a valuable training aid, since detailed coverage of aeronautical decision-making, components and systems, aerodynamics, flight instruments, performance limitations, ground operations, flight maneuvers, traffic patterns, emergencies, soaring weather, soaring techniques, and cross-country flight is included. Topics such as radio navigation and communication, use of flight information publications, and regulations are available in other Federal Aviation Administration (FAA) publications.The discussion and explanations reflect the most commonly used practices and principles. Occasionally, the word “must” or similar language is used where the desired action is deemed critical. The use of such language is not intended to add to, interpret, or relieve a duty imposed by Title 14 of the Code of Federal Regulations (14 CFR). Persons working towards a glider rating are advised to review the references from the applicable practical test standards (FAA-G-8082-4, Sport Pilot and Flight Instructor with a Sport Pilot Rating Knowledge Test Guide, FAA-G-8082-5, Commercial Pilot Knowledge Test Guide, and FAA-G-8082-17, Recreational Pilot and Private Pilot Knowledge Test Guide). Resources for study include FAA-H-8083-25, Pilot’s Handbook of Aeronautical Knowledge, FAA-H-8083-2, Risk Management Handbook, and Advisory Circular (AC) 00-6, Aviation Weather For Pilots and Flight Operations Personnel, AC 00-45, Aviation Weather Services, as these documents contain basic material not duplicated herein. All beginning applicants should refer to FAA-H-8083-25, Pilot’s Handbook of Aeronautical Knowledge, for study and basic library reference.It is essential for persons using this handbook to become familiar with and apply the pertinent parts of 14 CFR and the Aeronautical Information Manual (AIM). The AIM is available online at . The current Flight Standards Service airman training and testing material and learning statements for all airman certificates and ratings can be obtained from .This handbook supersedes FAA-H-8083-13, Glider Flying Handbook, dated 2003. Always select the latest edition of any publication and check the website for errata pages and listing of changes to FAA educational publications developed by the FAA’s Airman Testing Standards Branch, AFS-630.This handbook is available for download, in PDF format, from .This handbook is published by the United States Department of Transportation, Federal Aviation Administration, Airman Testing Standards Branch, AFS-630, P.O. Box 25082, Oklahoma City, OK 73125.Comments regarding this publication should be sent, in email form, to the following address:********************************************John M. AllenDirector, Flight Standards Serviceiiii vAcknowledgmentsThe Glider Flying Handbook was produced by the Federal Aviation Administration (FAA) with the assistance of Safety Research Corporation of America (SRCA). The FAA wishes to acknowledge the following contributors: Sue Telford of Telford Fishing & Hunting Services for images used in Chapter 1JerryZieba () for images used in Chapter 2Tim Mara () for images used in Chapters 2 and 12Uli Kremer of Alexander Schleicher GmbH & Co for images used in Chapter 2Richard Lancaster () for images and content used in Chapter 3Dave Nadler of Nadler & Associates for images used in Chapter 6Dave McConeghey for images used in Chapter 6John Brandon (www.raa.asn.au) for images and content used in Chapter 7Patrick Panzera () for images used in Chapter 8Jeff Haby (www.theweatherprediction) for images used in Chapter 8National Soaring Museum () for content used in Chapter 9Bill Elliot () for images used in Chapter 12.Tiffany Fidler for images used in Chapter 12.Additional appreciation is extended to the Soaring Society of America, Inc. (), the Soaring Safety Foundation, and Mr. Brad Temeyer and Mr. Bill Martin from the National Oceanic and Atmospheric Administration (NOAA) for their technical support and input.vv iPreface (iii)Acknowledgments (v)Table of Contents (vii)Chapter 1Gliders and Sailplanes ........................................1-1 Introduction....................................................................1-1 Gliders—The Early Years ..............................................1-2 Glider or Sailplane? .......................................................1-3 Glider Pilot Schools ......................................................1-4 14 CFR Part 141 Pilot Schools ...................................1-5 14 CFR Part 61 Instruction ........................................1-5 Glider Certificate Eligibility Requirements ...................1-5 Common Glider Concepts ..............................................1-6 Terminology...............................................................1-6 Converting Metric Distance to Feet ...........................1-6 Chapter 2Components and Systems .................................2-1 Introduction....................................................................2-1 Glider Design .................................................................2-2 The Fuselage ..................................................................2-4 Wings and Components .............................................2-4 Lift/Drag Devices ...........................................................2-5 Empennage .....................................................................2-6 Towhook Devices .......................................................2-7 Powerplant .....................................................................2-7 Self-Launching Gliders .............................................2-7 Sustainer Engines .......................................................2-8 Landing Gear .................................................................2-8 Wheel Brakes .............................................................2-8 Chapter 3Aerodynamics of Flight .......................................3-1 Introduction....................................................................3-1 Forces of Flight..............................................................3-2 Newton’s Third Law of Motion .................................3-2 Lift ..............................................................................3-2The Effects of Drag on a Glider .....................................3-3 Parasite Drag ..............................................................3-3 Form Drag ...............................................................3-3 Skin Friction Drag ..................................................3-3 Interference Drag ....................................................3-5 Total Drag...................................................................3-6 Wing Planform ...........................................................3-6 Elliptical Wing ........................................................3-6 Rectangular Wing ...................................................3-7 Tapered Wing .........................................................3-7 Swept-Forward Wing ..............................................3-7 Washout ..................................................................3-7 Glide Ratio .................................................................3-8 Aspect Ratio ............................................................3-9 Weight ........................................................................3-9 Thrust .........................................................................3-9 Three Axes of Rotation ..................................................3-9 Stability ........................................................................3-10 Flutter .......................................................................3-11 Lateral Stability ........................................................3-12 Turning Flight ..............................................................3-13 Load Factors .................................................................3-13 Radius of Turn ..........................................................3-14 Turn Coordination ....................................................3-15 Slips ..........................................................................3-15 Forward Slip .........................................................3-16 Sideslip .................................................................3-17 Spins .........................................................................3-17 Ground Effect ...............................................................3-19 Chapter 4Flight Instruments ...............................................4-1 Introduction....................................................................4-1 Pitot-Static Instruments ..................................................4-2 Impact and Static Pressure Lines................................4-2 Airspeed Indicator ......................................................4-2 The Effects of Altitude on the AirspeedIndicator..................................................................4-3 Types of Airspeed ...................................................4-3Table of ContentsviiAirspeed Indicator Markings ......................................4-5 Other Airspeed Limitations ........................................4-6 Altimeter .....................................................................4-6 Principles of Operation ...........................................4-6 Effect of Nonstandard Pressure andTemperature............................................................4-7 Setting the Altimeter (Kollsman Window) .............4-9 Types of Altitude ......................................................4-10 Variometer................................................................4-11 Total Energy System .............................................4-14 Netto .....................................................................4-14 Electronic Flight Computers ....................................4-15 Magnetic Compass .......................................................4-16 Yaw String ................................................................4-16 Inclinometer..............................................................4-16 Gyroscopic Instruments ...............................................4-17 G-Meter ........................................................................4-17 FLARM Collision Avoidance System .........................4-18 Chapter 5Glider Performance .............................................5-1 Introduction....................................................................5-1 Factors Affecting Performance ......................................5-2 High and Low Density Altitude Conditions ...........5-2 Atmospheric Pressure .............................................5-2 Altitude ...................................................................5-3 Temperature............................................................5-3 Wind ...........................................................................5-3 Weight ........................................................................5-5 Rate of Climb .................................................................5-7 Flight Manuals and Placards ..........................................5-8 Placards ......................................................................5-8 Performance Information ...........................................5-8 Glider Polars ...............................................................5-8 Weight and Balance Information .............................5-10 Limitations ...............................................................5-10 Weight and Balance .....................................................5-12 Center of Gravity ......................................................5-12 Problems Associated With CG Forward ofForward Limit .......................................................5-12 Problems Associated With CG Aft of Aft Limit ..5-13 Sample Weight and Balance Problems ....................5-13 Ballast ..........................................................................5-14 Chapter 6Preflight and Ground Operations .......................6-1 Introduction....................................................................6-1 Assembly and Storage Techniques ................................6-2 Trailering....................................................................6-3 Tiedown and Securing ................................................6-4Water Ballast ..............................................................6-4 Ground Handling........................................................6-4 Launch Equipment Inspection ....................................6-5 Glider Preflight Inspection .........................................6-6 Prelaunch Checklist ....................................................6-7 Glider Care .....................................................................6-7 Preventive Maintenance .............................................6-8 Chapter 7Launch and Recovery Procedures and Flight Maneuvers ............................................................7-1 Introduction....................................................................7-1 Aerotow Takeoff Procedures .........................................7-2 Signals ........................................................................7-2 Prelaunch Signals ....................................................7-2 Inflight Signals ........................................................7-3 Takeoff Procedures and Techniques ..........................7-3 Normal Assisted Takeoff............................................7-4 Unassisted Takeoff.....................................................7-5 Crosswind Takeoff .....................................................7-5 Assisted ...................................................................7-5 Unassisted...............................................................7-6 Aerotow Climb-Out ....................................................7-6 Aerotow Release.........................................................7-8 Slack Line ...................................................................7-9 Boxing the Wake ......................................................7-10 Ground Launch Takeoff Procedures ............................7-11 CG Hooks .................................................................7-11 Signals ......................................................................7-11 Prelaunch Signals (Winch/Automobile) ...............7-11 Inflight Signals ......................................................7-12 Tow Speeds ..............................................................7-12 Automobile Launch ..................................................7-14 Crosswind Takeoff and Climb .................................7-14 Normal Into-the-Wind Launch .................................7-15 Climb-Out and Release Procedures ..........................7-16 Self-Launch Takeoff Procedures ..............................7-17 Preparation and Engine Start ....................................7-17 Taxiing .....................................................................7-18 Pretakeoff Check ......................................................7-18 Normal Takeoff ........................................................7-19 Crosswind Takeoff ...................................................7-19 Climb-Out and Shutdown Procedures ......................7-19 Landing .....................................................................7-21 Gliderport/Airport Traffic Patterns and Operations .....7-22 Normal Approach and Landing ................................7-22 Crosswind Landing ..................................................7-25 Slips ..........................................................................7-25 Downwind Landing ..................................................7-27 After Landing and Securing .....................................7-27viiiPerformance Maneuvers ..............................................7-27 Straight Glides ..........................................................7-27 Turns.........................................................................7-28 Roll-In ...................................................................7-29 Roll-Out ................................................................7-30 Steep Turns ...........................................................7-31 Maneuvering at Minimum Controllable Airspeed ...7-31 Stall Recognition and Recovery ...............................7-32 Secondary Stalls ....................................................7-34 Accelerated Stalls .................................................7-34 Crossed-Control Stalls ..........................................7-35 Operating Airspeeds .....................................................7-36 Minimum Sink Airspeed ..........................................7-36 Best Glide Airspeed..................................................7-37 Speed to Fly ..............................................................7-37 Chapter 8Abnormal and Emergency Procedures .............8-1 Introduction....................................................................8-1 Porpoising ......................................................................8-2 Pilot-Induced Oscillations (PIOs) ..............................8-2 PIOs During Launch ...................................................8-2 Factors Influencing PIOs ........................................8-2 Improper Elevator Trim Setting ..............................8-3 Improper Wing Flaps Setting ..................................8-3 Pilot-Induced Roll Oscillations During Launch .........8-3 Pilot-Induced Yaw Oscillations During Launch ........8-4 Gust-Induced Oscillations ..............................................8-5 Vertical Gusts During High-Speed Cruise .................8-5 Pilot-Induced Pitch Oscillations During Landing ......8-6 Glider-Induced Oscillations ...........................................8-6 Pitch Influence of the Glider Towhook Position ........8-6 Self-Launching Glider Oscillations During Powered Flight ...........................................................8-7 Nosewheel Glider Oscillations During Launchesand Landings ..............................................................8-7 Tailwheel/Tailskid Equipped Glider Oscillations During Launches and Landings ..................................8-8 Aerotow Abnormal and Emergency Procedures ............8-8 Abnormal Procedures .................................................8-8 Towing Failures........................................................8-10 Tow Failure With Runway To Land and Stop ......8-11 Tow Failure Without Runway To Land BelowReturning Altitude ................................................8-11 Tow Failure Above Return to Runway Altitude ...8-11 Tow Failure Above 800' AGL ..............................8-12 Tow Failure Above Traffic Pattern Altitude .........8-13 Slack Line .................................................................8-13 Ground Launch Abnormal and Emergency Procedures ....................................................................8-14 Abnormal Procedures ...............................................8-14 Emergency Procedures .............................................8-14 Self-Launch Takeoff Emergency Procedures ..............8-15 Emergency Procedures .............................................8-15 Spiral Dives ..................................................................8-15 Spins .............................................................................8-15 Entry Phase ...............................................................8-17 Incipient Phase .........................................................8-17 Developed Phase ......................................................8-17 Recovery Phase ........................................................8-17 Off-Field Landing Procedures .....................................8-18 Afterlanding Off Field .............................................8-20 Off-Field Landing Without Injury ........................8-20 Off-Field Landing With Injury .............................8-20 System and Equipment Malfunctions ..........................8-20 Flight Instrument Malfunctions ................................8-20 Airspeed Indicator Malfunctions ..........................8-21 Altimeter Malfunctions .........................................8-21 Variometer Malfunctions ......................................8-21 Compass Malfunctions .........................................8-21 Glider Canopy Malfunctions ....................................8-21 Broken Glider Canopy ..........................................8-22 Frosted Glider Canopy ..........................................8-22 Water Ballast Malfunctions ......................................8-22 Retractable Landing Gear Malfunctions ..................8-22 Primary Flight Control Systems ...............................8-22 Elevator Malfunctions ..........................................8-22 Aileron Malfunctions ............................................8-23 Rudder Malfunctions ............................................8-24 Secondary Flight Controls Systems .........................8-24 Elevator Trim Malfunctions .................................8-24 Spoiler/Dive Brake Malfunctions .........................8-24 Miscellaneous Flight System Malfunctions .................8-25 Towhook Malfunctions ............................................8-25 Oxygen System Malfunctions ..................................8-25 Drogue Chute Malfunctions .....................................8-25 Self-Launching Gliders ................................................8-26 Self-Launching/Sustainer Glider Engine Failure During Takeoff or Climb ..........................................8-26 Inability to Restart a Self-Launching/SustainerGlider Engine While Airborne .................................8-27 Self-Launching Glider Propeller Malfunctions ........8-27 Self-Launching Glider Electrical System Malfunctions .............................................................8-27 In-flight Fire .............................................................8-28 Emergency Equipment and Survival Gear ...................8-28 Survival Gear Checklists ..........................................8-28 Food and Water ........................................................8-28ixClothing ....................................................................8-28 Communication ........................................................8-29 Navigation Equipment ..............................................8-29 Medical Equipment ..................................................8-29 Stowage ....................................................................8-30 Parachute ..................................................................8-30 Oxygen System Malfunctions ..................................8-30 Accident Prevention .....................................................8-30 Chapter 9Soaring Weather ..................................................9-1 Introduction....................................................................9-1 The Atmosphere .............................................................9-2 Composition ...............................................................9-2 Properties ....................................................................9-2 Temperature............................................................9-2 Density ....................................................................9-2 Pressure ...................................................................9-2 Standard Atmosphere .................................................9-3 Layers of the Atmosphere ..........................................9-4 Scale of Weather Events ................................................9-4 Thermal Soaring Weather ..............................................9-6 Thermal Shape and Structure .....................................9-6 Atmospheric Stability .................................................9-7 Air Masses Conducive to Thermal Soaring ...................9-9 Cloud Streets ..............................................................9-9 Thermal Waves...........................................................9-9 Thunderstorms..........................................................9-10 Lifted Index ..........................................................9-12 K-Index .................................................................9-12 Weather for Slope Soaring .......................................9-14 Mechanism for Wave Formation ..............................9-16 Lift Due to Convergence ..........................................9-19 Obtaining Weather Information ...................................9-21 Preflight Weather Briefing........................................9-21 Weather-ReIated Information ..................................9-21 Interpreting Weather Charts, Reports, andForecasts ......................................................................9-23 Graphic Weather Charts ...........................................9-23 Winds and Temperatures Aloft Forecast ..............9-23 Composite Moisture Stability Chart .....................9-24 Chapter 10Soaring Techniques ..........................................10-1 Introduction..................................................................10-1 Thermal Soaring ...........................................................10-2 Locating Thermals ....................................................10-2 Cumulus Clouds ...................................................10-2 Other Indicators of Thermals ................................10-3 Wind .....................................................................10-4 The Big Picture .....................................................10-5Entering a Thermal ..............................................10-5 Inside a Thermal.......................................................10-6 Bank Angle ...........................................................10-6 Speed .....................................................................10-6 Centering ...............................................................10-7 Collision Avoidance ................................................10-9 Exiting a Thermal .....................................................10-9 Atypical Thermals ..................................................10-10 Ridge/Slope Soaring ..................................................10-10 Traps ......................................................................10-10 Procedures for Safe Flying .....................................10-12 Bowls and Spurs .....................................................10-13 Slope Lift ................................................................10-13 Obstructions ...........................................................10-14 Tips and Techniques ...............................................10-15 Wave Soaring .............................................................10-16 Preflight Preparation ...............................................10-17 Getting Into the Wave ............................................10-18 Flying in the Wave .................................................10-20 Soaring Convergence Zones ...................................10-23 Combined Sources of Updrafts ..............................10-24 Chapter 11Cross-Country Soaring .....................................11-1 Introduction..................................................................11-1 Flight Preparation and Planning ...................................11-2 Personal and Special Equipment ..................................11-3 Navigation ....................................................................11-5 Using the Plotter .......................................................11-5 A Sample Cross-Country Flight ...............................11-5 Navigation Using GPS .............................................11-8 Cross-Country Techniques ...........................................11-9 Soaring Faster and Farther .........................................11-11 Height Bands ..........................................................11-11 Tips and Techniques ...............................................11-12 Special Situations .......................................................11-14 Course Deviations ..................................................11-14 Lost Procedures ......................................................11-14 Cross-Country Flight in a Self-Launching Glider .....11-15 High-Performance Glider Operations and Considerations ............................................................11-16 Glider Complexity ..................................................11-16 Water Ballast ..........................................................11-17 Cross-Country Flight Using Other Lift Sources ........11-17 Chapter 12Towing ................................................................12-1 Introduction..................................................................12-1 Equipment Inspections and Operational Checks .........12-2 Tow Hook ................................................................12-2 Schweizer Tow Hook ...........................................12-2x。
麻醉学专业虚拟仿真教学系统构建与实践

齐齐哈尔医学院学报2019年第40卷第18期Journal of Qiqihar Medical University,2019,Vol.40,No.18・2331••高教研究.麻醉学专业虚拟仿真教学系统构建与实践郭文俊程慧娴房尚萍张恺辰王欢包鹏举【摘要】目的通过对“麻醉术前访视”虚拟仿真教学软件使用效果的分析,探讨麻醉学专业虚拟仿真教学系统的建设与实践。
方法(1)随机选取100名已完成专业课学习的麻醉学专业学生,对“麻醉术前访视”虚拟仿真教学软件使用情况进行问卷调査,了解学生对麻醉术前访视虚拟仿真教学软件使用情况、使用软件后对相关知识掌握情况,学生对仿真模拟教学软件的建议。
(2)总结“麻醉术前访视”虚拟教学软件在国家虚拟仿真实验教学项目工作网公示结果。
(3)通过上述调查分析,探讨麻醉学专业虚拟仿真教学系统的特点,探讨软件系统的构建。
结果调查问卷回收率为100%,结果显示:99%使用者认为软件下载安装较方便,虚拟场景逼真为95%,内容较全面占94%、评价系统准确率92%,100%使用者认为对相关内容理解有帮助,可反复学习,91%认为能激发学习兴趣,98%学生认为训练临床思维效果好,但人机对话准确率为68%o改进意见主要为:对话识别准确率进一步提高等。
国家虚拟仿真实验教学项目工作网公示结果显示:共计1115人参加评价,其中好评率为1105人,评分4.4分(总分5分)。
结论麻醉学专业虚拟仿真教学具有使用便捷、考核全面、可重复性好、能有效训练临床思维等优点,麻醉学专业虚拟仿真教学系统地构建需要进行多层次、多角度的全面设计,使学生通过反复学习,达到从易到难逐步提高,熟练掌握相关理论和实践,提高学生自主学习能力,训练良好的临床思维。
【关键词】模拟仿真教学;麻醉学;麻醉术前访视[中图分类号]G642[文献标识码]A DOI:10.3969/j.issn.1002-1256.2019.18.038Building and practice of virtual simulation teaching system for anesthesiology specialty GUO Wen-jun.School of Anesthesiology,Wannan Medical College,Wuhu,Anhui,241001,China.[Abstract]Objective To explore the construction and practice of virtual simulation teaching system foranesthesiology specialty based on the analysis of the teaching effect of virtual simulation teaching software namedM preoperative evaluations of anesthesia M.Methods100students majored in anesthesiology those who havecompleted their professional courses were randomly selected.After using virtual simulation teaching software named"preoperative evaluations of anesthesia M,the students will finish a questionnaire survey to understand useof the software,the state of student's master relative knowledge and the advice on the software.The result of thevirtual teaching software of u preoperative evaluations of anesthesia M on the national virtual simulation experimentalteaching project network was summarized.Through the above investigation and analysis,the characteristics of thevirtual simulation teaching system for anesthesiology major and how to establish the virtual simulation teachingsystem were discussed.Results The recovery rate of the questionnaire was100%.The results showed that99%of the users thought that the software was convenient to download and install,the fidelity of virtual scene was95%,94%persons thought that the content was comprehensive,and the accuracy rate of the evaluation systemwas92%.100%of the users thought that it was helpful to understand the relevant content and could learnrepeatedly,91%persons thought that stimulate learning could make study interestingly,and98%students think itwas effective for training clinical thinking,but the accuracy of man-machine dialogue was only68%.The mainimprovement suggestions were:the accuracy of dialogue recognition needed further improvement.The results of thebulletin in the national virtual simulation experiment teaching project network showed that1115peopleparticipated in the evaluation,of which1105were praised,with a score of4.4(total score is5).ConclusionsThe virtual simulation teaching for anesthesiology major has the advantages of convenient to use,assessment comprehensively,good repeatability and effective training of clinical thinking.The systematic construction of thevirtual simulation teaching of anesthesiology major needs a comprehensive design of multi-level and multi-angle.Through repeated learning,students could gradually improve from easy to difficult,master relevant theories andpractices skillfully,and improve their self-regulated learning ability and get the purpose of training good clinicalthinking.[Key words]Virtual simulation teaching system;Anesthesiology;Preoperative evaluations ofanesthesia基金项目:2018年安徽省质量工程项目:麻醉学实验实训中心(2018sxzx52);麻醉术前访视虚拟仿真实验教学项目(2018xfsyxm073)作者单位;241001安徽芜湖,皖南医学院麻醉学院通信作者:郭文俊,Email:gwj8581@•2332•齐齐哈尔医学院学报2019年第40卷第18期Journal of Qiqihar Medical University,2019.Vol.40,No.18麻醉学的特点为涉及医学范畴广,实践性强,临床思维敏锐,病情判断准确果断.这些都需要经过反复多次训练才能实现,但临床难以满足训练要求,尤其是罕见病例、危急重病例等,因此,模拟教学广泛应用于各医学专业技能培训⑴,能较好的满足此类教学要求。
仿真与结果英语作文

仿真与结果英语作文In the realm of scientific research and technological development, simulation plays a pivotal role in predicting outcomes and analyzing the behavior of complex systems. This essay will delve into the importance of simulation, the process of creating a simulation, and the significance of the results obtained from such simulations.The Importance of SimulationSimulations are virtual representations of real-world processes or systems. They are invaluable tools forscientists and engineers as they allow for the testing of theories, hypotheses, and designs without the need for physical prototypes. This not only saves time and resources but also reduces the risk of failure and the potential for costly mistakes.The Process of Creating a SimulationCreating a simulation involves several key steps. First, a clear understanding of the system or process to be simulated is essential. This includes defining the parameters, variables, and constraints that will govern the simulation. Next, a model is developed, which is a mathematical or computational representation of the system. This model is then programmed into a computer using specialized software.Once the model is developed, it must be validated to ensure that it accurately represents the real-world system. This involves comparing the simulation's output with empirical data or known results. If discrepancies are found, the model must be refined and the validation process repeated until the simulation is deemed reliable.The Significance of ResultsThe results obtained from a simulation are crucial for several reasons. They provide insights into the behavior of the system under various conditions, which can be used to make informed decisions. For instance, in the field of aerodynamics, simulation results can guide the design of more efficient aircraft.Furthermore, simulation results can be used to optimize processes, reduce costs, and improve performance. In the pharmaceutical industry, simulations are used to predict the efficacy and side effects of new drugs, thereby accelerating the drug development process.ConclusionIn conclusion, simulation is a powerful tool that has revolutionized the way we approach problem-solving and innovation. By providing a safe and controlled environment to test theories and designs, simulations have become indispensable in various fields. The results they yield are not only informative but also instrumental in guiding the direction of future research and development. As technologyadvances, the capabilities of simulations are expected to grow, further enhancing their impact on our understanding of complex systems.。
基于Visual Environment焊接模拟方法

图1Start/Stop/Reread菜单栏
2.2Visual Environment软件安装及破解Visual Environment的安装一定要建立在Sysweld成功安装的基础上。
Visual Environment的软件安装很简单,但是其破解方法相当复杂,网上资料残缺不全,而且破解步骤不是很详细,所以在此将破解方法依次罗列出来。
破解共四个步骤:
首先将破解文件粘贴到安装目录(这一步最简单,且每一层的焊道数目都是两道。
图2V形坡口焊道布置示意图
网格的划分质量对于焊接模拟结果有着相当重要的作用。
由于焊缝附近的区域温度场梯度较大,所以网格相对密集一些。
距离热源模型较远的试板两端的网格可以相对稀疏些。
此种网格划分方法相对合理,焊缝区域密集的网格提高了模拟的精确度,而试板两端的相对稀疏的网格可以保证较短的计算时长。
最终焊接部件的网格模型如图3所示。
图3网格模型示意图
当网格模型建立成功后,接下来的操作就是建立焊接线以及参考线。
此操作需要在Visual Weld软件里进行。
3.2设置前处理条件
设置前处理条件,就是设置实际焊接实验中的工艺参数。
焊接试验采用的是型号为WSE-315的逆变交直流氩弧焊机,试验电流在180A上下浮动,电压在30V上下浮动。
根据陈伯蠡[7]总结的不同焊接方法的
的节点(图中的红色节点)设置为固定夹持点。
图4焊接工件的固定方法。
SIMATIC Energy Manager PRO V7.2 - Operation Operat
2 Energy Manager PRO Client................................................................................................................. 19
2.1 2.1.1 2.1.2 2.1.3 2.1.4 2.1.5 2.1.5.1 2.1.5.2 2.1.6
Basics ................................................................................................................................ 19 Start Energy Manager ........................................................................................................ 19 Client as navigation tool..................................................................................................... 23 Basic configuration ............................................................................................................ 25 Search for object................................................................................................................ 31 Quicklinks.......................................................................................................................... 33 Create Quicklinks ............................................................................................................... 33 Editing Quicklinks .............................................................................................................. 35 Help .................................................................................................................................. 38