Random Sample Consensus
RANSAC

RANSAC是“random sample consensus”(随 机抽样一致)的缩写。该算法最早由Fischler 和Bolles于1981年提出。该算法的主要功能是 从一组包含“局外点”(即错误点)通过迭代 的方式估计数学模型的参数。它是一种不确定 的算法----有一定的概率得出一个合理的结果。
RANSAC的基本假设
(1)数据的“局内点”,分布可以用一些模 型参数来解释。 (2)数据的“局外点”,是不能适应该模型 的数据。 (3)除此之外的数据属于噪声。 (4)给定一组局内点(数量相对整体数据很 少),存在一个可以估计模型参数的过程,该 模型能够解释或使用于局内点。
RANSAC的基本假设
RANSAC阈值设置
假设迭代k次都没有选择到n个点均为内点的情 n k 况,其概率为 (1 w ) 假设迭代k次能够找到n个点均为内点的情况的 概率为p(需要设臵的阈值),那么
p 1 (1 wn )k
因此迭代次数k
log( 1 p ) k n log( 1 w )
RANSAC应用
RANSAC算法经常应用于计算机视觉求解立体 相机的基础矩阵,图像拼接时候的变换矩阵等。
谢 谢
最小二乘法估计参数
RANSAC参数估计过程
RANSAC阈值设置
假设w为从数据集内随机选取出的点为局内点 的概率。(w = 局内点数目/数据集的数目) 假设估计模型需要选定n个点,那么选取n个 n 点均为局内点概率为 w 一次随机选取过程,如果选择的n个点中存在 局外点,此时表明我们使用这几个点估计出的 并不是一个理想的模型,那么其概率为:1 wn
RANSAC阈值设置
musx

模糊数学方法在自然科学或社会科学研究中,存在着许多定义不很严格或者说具有模糊性的概念。
这里所谓的模糊性,主要是指客观事物的差异在中间过渡中的不分明性,如某一生态条件对某种害虫、某种作物的存活或适应性可以评价为“有利、比较有利、不那么有利、不利”;灾害性霜冻气候对农业产量的影响程度为“较重、严重、很严重”,等等。
这些通常是本来就属于模糊的概念,为处理分析这些“模糊”概念的数据,便产生了模糊集合论。
根据集合论的要求,一个对象对应于一个集合,要么属于,要么不属于,二者必居其一,且仅居其一。
这样的集合论本身并无法处理具体的模糊概念。
为处理这些模糊概念而进行的种种努力,催生了模糊数学。
模糊数学的理论基础是模糊集。
模糊集的理论是1965年美国自动控制专家查德(L. A. Zadeh)教授首先提出来的,近10多年来发展很快。
模糊集合论的提出虽然较晚,但目前在各个领域的应用十分广泛。
实践证明,模糊数学在农业中主要用于病虫测报、种植区划、品种选育等方面,在图像识别、天气预报、地质地震、交通运输、医疗诊断、信息控制、人工智能等诸多领域的应用也已初见成效。
从该学科的发展趋势来看,它具有极其强大的生命力和渗透力。
在侧重于应用的模糊数学分析中,经常应用到聚类分析、模式识别和综合评判等方法。
在DPS系统中,我们将模糊数学的分析方法与一般常规统计方法区别开来,列专章介绍其分析原理及系统设计的有关功能模块程序的操作要领,供用户参考和使用。
第1节模糊聚类分析1. 模糊集的概念对于一个普通的集合A,空间中任一元素x,要么x∈A,要么x∉A,二者必居其一。
这一特征可用一个函数表示为:A x x A x A()=∈∉⎧⎨⎩1A(x)即为集合A的特征函数。
将特征函数推广到模糊集,在普通集合中只取0、1两值推广到模糊集中为[0, 1]区间。
定义1 设X为全域,若A为X上取值[0, 1]的一个函数,则称A为模糊集。
如给5个同学的性格稳重程度打分,按百分制给分,再除以100,这样给定了一个从域X={x1 , x2 , x3 , x4, x5}到[0, 1]闭区间的映射。
ransac经典文章

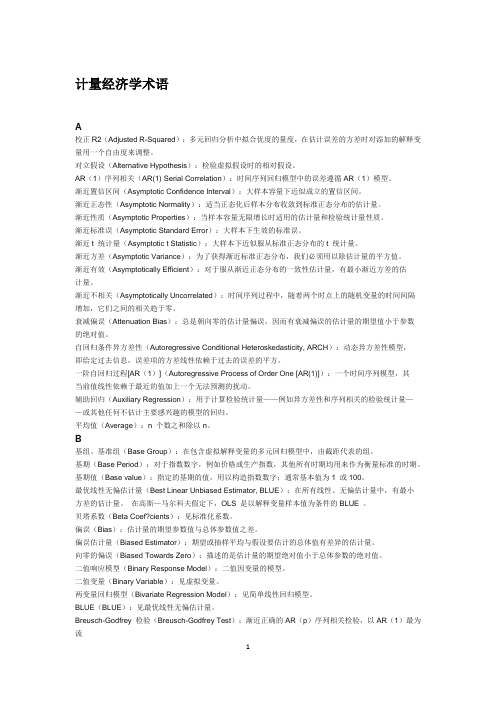
PROBLEM: Given the set of seven (x,y) pairs shown in the plot, find a best fit line, assuming that no valid datum deviates from this line by more than 0.8 units.
Communications of the ACM June 1981 Volume 24 Number 6
Fig. 1. Failure of Lowing Out The Worst Residual" Heuristic), to Deal with an Erroneous Data Point.
I. Introduction
(RANSAC),for fitting a model to experimental data is
introduced. RANSAC is capable of interpreting/ smoothing data containing a significant percentage of gross errors, and is thus ideally suited for applications in automated image analysis where interpretation is based on the data provided by error-prone feature detectors. A major portion of this paper describes the application of RANSAC to the Location Determination Problem (LDP): Given an image depicting a set of landmarks with known locations, determine that point in space from which the image was obtained. In response to a RANSAC requirement, new results are derived on the minimum number of landmarks needed to obtain a solution, and algorithms are presented for computing these minimum-landmark solutions in closed form. These results provide the basis for an automatic system that can solve the LDP under difficult viewing
ransac算法公式

RANSAC(Random Sample Consensus)算法是一种用于拟合模型和去除离群值的迭代算法。
它适用于一些具有噪音和异常值的数据集。
RANSAC算法的基本步骤如下:1. 随机从数据集中选择一个最小样本数(通常是最小的模型参数数量)作为内点,将其余的数据点标记为外点。
2. 使用选择的内点拟合模型。
3. 计算所有数据点到该模型的距离,并将小于给定阈值的数据点标记为临时内点。
4. 如果临时内点数目大于预设值,接受当前模型并重新拟合使用所有这些临时内点。
5. 重复上述步骤固定的迭代次数,选择拟合度最高的模型作为最终模型。
RANSAC算法的数学公式如下:输入:- 数据集D = {x_1, x_2, ..., x_N},其中x_i 表示第i 个数据点- 模型参数数量k- 最大迭代次数max_iterations- 内点数量阈值min_inliers- 残差阈值threshold输出:拟合模型参数1. best_model = null2. best_score = 03. for iterations = 1 to max_iterations:4. random_sample = randomly select k samples from D5. maybe_model = fit_model_to_samples(random_sample)6. consensus_set = empty set7. for each data_point in D:8. if distance_between(data_point, maybe_model) < threshold:9. add data_point to consensus_set10. if size of consensus_set > min_inliers:11. definitely_model = fit_model_to_samples(consensus_set)12. score = evaluate_model(definitely_model)13. if score > best_score:14. best_model = definitely_model15. best_score = score16. return best_model其中,fit_model_to_samples() 表示使用数据点进行模型拟合,distance_between() 表示计算数据点到模型的距离,evaluate_model() 表示评估模型的拟合度得分。
rransac算法

rransac算法RANSAC算法是一种常用的参数估计算法,它可以在含有噪声和异常值的数据集中,准确地估计出最优的模型参数。
RANSAC算法的全称是Random Sample Consensus,它的基本思想是通过随机采样的方式,选择数据集中的一部分样本来进行模型估计,然后通过计算内点的数量来评估模型的拟合程度,从而得到最优的模型参数。
RANSAC算法的核心步骤包括:随机采样、模型拟合、内点筛选和参数估计。
首先,在数据集中随机选择一定数量的样本,然后利用这些样本来拟合一个模型。
模型的具体形式可以根据问题的不同而定,比如直线、平面、圆等。
拟合模型之后,遍历整个数据集,计算每个样本到模型的距离,如果距离小于一定的阈值,则认为该样本是内点,否则为外点。
根据内点的数量,评估模型的拟合程度。
如果内点数量超过阈值,则认为当前模型是好的模型,否则重新进行随机采样,重复上述步骤,直到找到满足条件的模型。
RANSAC算法的优点在于它能够有效地处理数据集中存在的异常值。
传统的拟合算法(如最小二乘法)对于存在异常值的数据集容易产生较大偏差,导致模型参数估计不准确。
而RANSAC算法通过随机采样和内点筛选的方式,可以忽略掉异常值的干扰,从而得到更准确的模型参数。
然而,RANSAC算法也存在一些问题和局限性。
首先,算法的性能依赖于样本数量和内点数量的选择。
如果样本数量较少或内点数量较少,可能会导致模型估计的不准确性。
其次,算法的鲁棒性较差,对于噪声较大的数据集容易产生较大误差。
此外,RANSAC算法只能估计全局最优的模型参数,对于存在多个局部最优解的情况,无法得到完全准确的结果。
为了改进RANSAC算法的性能,研究者们提出了一些改进的方法。
例如,采用自适应的采样策略可以提高算法的鲁棒性和效率。
另外,结合其他的优化算法(如梯度下降算法)可以进一步提高模型参数的估计精度。
总结起来,RANSAC算法是一种常用的参数估计算法,它通过随机采样和模型拟合的方式,能够在含有噪声和异常值的数据集中,准确地估计出最优的模型参数。
英汉对照计量经济学术语
计量经济学术语A校正R2(Adjusted R-Squared):多元回归分析中拟合优度的量度,在估计误差的方差时对添加的解释变量用一个自由度来调整。
对立假设(Alternative Hypothesis):检验虚拟假设时的相对假设。
AR(1)序列相关(AR(1) Serial Correlation):时间序列回归模型中的误差遵循AR(1)模型。
渐近置信区间(Asymptotic Confidence Interval):大样本容量下近似成立的置信区间。
渐近正态性(Asymptotic Normality):适当正态化后样本分布收敛到标准正态分布的估计量。
渐近性质(Asymptotic Properties):当样本容量无限增长时适用的估计量和检验统计量性质。
渐近标准误(Asymptotic Standard Error):大样本下生效的标准误。
渐近t 统计量(Asymptotic t Statistic):大样本下近似服从标准正态分布的t 统计量。
渐近方差(Asymptotic Variance):为了获得渐近标准正态分布,我们必须用以除估计量的平方值。
渐近有效(Asymptotically Efficient):对于服从渐近正态分布的一致性估计量,有最小渐近方差的估计量。
渐近不相关(Asymptotically Uncorrelated):时间序列过程中,随着两个时点上的随机变量的时间间隔增加,它们之间的相关趋于零。
衰减偏误(Attenuation Bias):总是朝向零的估计量偏误,因而有衰减偏误的估计量的期望值小于参数的绝对值。
自回归条件异方差性(Autoregressive Conditional Heteroskedasticity, ARCH):动态异方差性模型,即给定过去信息,误差项的方差线性依赖于过去的误差的平方。
一阶自回归过程[AR(1)](Autoregressive Process of Order One [AR(1)]):一个时间序列模型,其当前值线性依赖于最近的值加上一个无法预测的扰动。
211081693_基于SHOT与目标函数对称ICP的低重叠率术前术中点云配准算法
Copyright©博看网. All Rights Reserved.
· 112·
北京生物医学工程 第 42 卷
registration more challenging. This paper adopts the combination of local geometric features and distance
算法能应对 低 重 叠 配 准 问 题,具 有 较 高 的 鲁 棒 性
和计算效率。
特征的配准方法 [14-20] 能够稳健地找到点云之间的
对应关系,且局部描述子在有遮挡的场景中更稳健;
标准,单独使用在迭代过程中存在歧义。
因此,本文提出局部几何特征与距离度量相结
合的方式应对低重叠配准问题。 方向直方图描述子
优。 Raposo 等[11] 用两点及其法向量代替 Super 4PCS
0 引言
椎弓根螺钉内固定术广泛应用于胸腰椎骨折、
脊柱退变、外伤等疾病的治疗
[1]
,准确的螺钉置入
能提高固定强度并减少对周围重要解剖结构的损
伤。 以往手术以解剖学辅助影像定位为主,根据医
生的经验和术中二维射线透视结果来确定螺钉的位
通过增加
角度约束减少无效点对的生成。 但这两种方法只适
用于重叠率相对较高的场景,否则仍会陷入局部最
好的平衡;Rusinkiewicz [27] 提出的目标函数对称 ICP
量,允许更多的位置集。 本文针对术前术中点云数
据低重叠率且存在噪声、异常值的情况,采用 SHOT
特征描述子与目标函数对称 ICP 结合的方法,以实
symmetric point⁃to⁃surface objective function. Registration experiments were performed on five groups of lumbar
因果推断面试题

因果推断面试题
因果推断是统计学和机器学习中的一个重要概念,用于研究变量之间的因果关系。
以下是一些可能的因果推断面试题:
1. 什么是因果关系,与相关关系有什么区别?
2. 请解释一下因果图(Causal Diagram)或结构方程模型(Structural Equation Modeling, SEM)在因果推断中的作用。
3. 什么是反事实(Counterfactual)?如何进行反事实推断?
4. 请解释一下因果效应(Causal Effect)的概念,以及如何估计它?
5. 什么是因果推理中的潜在结果模型(Latent Variable Model)?请给出
一个简单的例子。
6. 请解释一下因果推理中的混淆因素(Confounding Factor)是什么,以
及如何处理它?
7. 什么是因果推理中的一致性(Consistency)和识别性(Identifiability)?
8. 请解释一下因果推理中的直接效应(Direct Effect)和间接效应(Indirect Effect)的概念,并给出一个简单的例子。
9. 在因果推断中,如何进行敏感性分析(Sensitivity Analysis)?
10. 请解释一下因果推理中的全局平均处理效应(Average Treatment Effect, ATE)和个体处理效应(Individual Treatment Effect, ITE)的概念,并比较它们的优缺点。
这些问题可以帮助你了解应聘者对因果推断的理解和掌握程度。
Chapter9_Image Stitching and blending
• Different approaches for them
Parallax Removal
• Based on bundle adjustment, compute 3D point location, then reproject it to images
Deghosting a mosaic with motion parallax (Shum and Szeliski 2000) c 2000 IEEE: (a) composite with parallax; (b) after a single deghosting step (patch size 32); (c) after multiple steps (sizes 32, 16 and 8)
Observed location of feature I in image k
• Xik depends on xij, error-in-variable • Overweighted for feature observed many times
Bundle Adjustment
• True bundle adjustment to estimate camera pose and 3d points
Parallax Removal
• Blurry or ghosting
– Unmodeled radial distortion – 3D parallax: failure to rotate the camera around its optical center – Small scene motion, large scale scene motion
2JT J 2J T e0 0 J J J e0
MatchingwithPROSAC-ProgressiveSampleConsensus

Figure 1: The Great Wall image pair with an occlusion. Given 250 tentative correspondences as input, both PROSAC and RANSAC found 57 correct correspondences (inliers). To estimate the epipolar geometry, RANSAC tested 106,534 seven-tuples of correspondences in 10.76 seconds while PROSAC tested only 9 seven-tuples in 0.06 sec (on average, over hundred runs). Inlier correspondences are marked by a line segment joining the corresponding points. Standard RANSAC does not model the local matching process. It is viewed as a black box that generates N tentative correspondences, i.e. the error-prone matches established by comparing local descriptors. The set U of tentative correspondences contains an a priori unknown number I of 1
计量经济学中英文词汇对照
Controlled experiments Conventional depth Convolution Corrected factor Corrected mean Correction coefficient Correctness Correlation coefficient Correlation index Correspondence Counting Counts Covaห้องสมุดไป่ตู้iance Covariant Cox Regression Criteria for fitting Criteria of least squares Critical ratio Critical region Critical value
Asymmetric distribution Asymptotic bias Asymptotic efficiency Asymptotic variance Attributable risk Attribute data Attribution Autocorrelation Autocorrelation of residuals Average Average confidence interval length Average growth rate BBB Bar chart Bar graph Base period Bayes' theorem Bell-shaped curve Bernoulli distribution Best-trim estimator Bias Binary logistic regression Binomial distribution Bisquare Bivariate Correlate Bivariate normal distribution Bivariate normal population Biweight interval Biweight M-estimator Block BMDP(Biomedical computer programs) Boxplots Breakdown bound CCC Canonical correlation Caption Case-control study Categorical variable Catenary Cauchy distribution Cause-and-effect relationship Cell Censoring
ransac特征匹配 误差统计matlab
RANSAC(Random Sample Consensus)特征匹配是一种常用的计算机视觉算法,用于解决图像特征匹配中的误差问题。
在MATLAB中,RANSAC算法被广泛应用于图像处理和计算机视觉领域,其强大的误差统计功能使其成为处理复杂图像信息的重要工具。
1. RANSAC特征匹配的基本原理RANSAC算法的核心概念是通过随机采样一组数据来估计模型参数,并使用该模型来识别数据集中的内在模式。
在特征匹配中,RANSAC算法通过随机选择一些特征点来估计图像间的几何变换,然后使用这些估计得到的模型来匹配更多的特征点。
通过反复迭代和误差统计,RANSAC算法能够有效地筛选出具有强匹配关系的特征点,从而实现准确的特征匹配。
2. RANSAC特征匹配的应用在MATLAB中,RANSAC算法被广泛应用于图像配准、目标跟踪和三维重建等领域。
通过使用MATLAB中丰富的图像处理工具包和RANSAC算法,可以实现对复杂场景中图像特征的快速识别和匹配。
在航空航天领域,RANSAC特征匹配可以用于对大气层中的目标进行精确定位;在工业检测领域,RANSAC算法可以用于对工件表面缺陷的快速检测和识别。
3. RANSAC特征匹配的误差统计RANSAC算法在特征匹配中的优势之一是其强大的误差统计功能。
通过在随机采样和模型估计的过程中对误差进行统计和筛选,RANSAC算法能够有效地抵抗数据集中的噪声和异常值,从而获得更为鲁棒和准确的特征匹配结果。
在MATLAB中,可以通过对RANSAC算法进行参数调节和误差分析来优化特征匹配的效果,以应对不同图像场景和数据质量的挑战。
4. 个人观点和总结RANSAC特征匹配算法作为一种基于统计学原理的特征匹配方法,在MATLAB中具有广泛的应用前景和研究价值。
通过RANSAC算法的误差统计和模型优化,可以实现更为稳健和可靠的图像特征匹配,为图像处理和计算机视觉的相关领域带来新的发展机遇。
在实际应用中,我认为对于RANSAC算法的参数设置和误差分析非常重要,通过不断优化算法参数,可以进一步提高特征匹配的准确性和鲁棒性。
Ransac算法

Ransac算法用于在一群样本中去掉噪声样本,得到有效的样本采用随机抽样验证的方法以下节选自wikipedia,选有用的贴了过来RANSACRANSAC is an abbreviation for "RANdom SAmple Consensus". It isan algorithm to estimate parameters of a mathematical model from a set of observed data which contains outliers. The algorithm was first published by Fischler and Bolles in 1981.A basic assumption is that the data consists of "inliers", i.e., data points which can be explained by some set of model parameters, and "outliers" which are data points that do not fit the model. In addition to this, the data points can be subject to noise. The outliers can come, e.g., from extreme values of the noise or from erroneous measurements or incorrect hypotheses about the interpretation of data. RANSAC also assumes that, given a (usually small) set of inliers, there exists a procedure which can estimate the parameters of a model that optimally explains or fits this data.ExampleA simple example is fitting of a 2D line to set of observations. Assuming that this set contains both inliers, i.e., points which approximately can be fitted to a line, and outliers, points which cannot be fitted to this line, a simple least squares method for line fitting will in general produce a line with a bad fit to the inliers. The reason is that it is optimally fitted to all points, including theoutliers. RANSAC, on the other hand, can produce a model which is only computed from the inliers, provided that the probability of choosing only inliers in the selection of data points is sufficiently high. There is no guarantee for this situation, however, and there are a number of algorithm parameters which must be carefully chosen to keep the level of probability reasonably high.OverviewThe input to the RANSAC algorithm is a set of observed data values, a parameterized model which can explain or be fitted to the observations, and some confidence parameters.RANSAC achieves its goal by iteratively selecting a random subset of the original data points. These points are hypothetical inliers and this hypothesis is then tested as follows. A model is fitted to the hypothetical inliers, that is, all free parameters of the model are reconstructed from the point set. All other data points are then tested against the fitted model, that is, for every point of the remaining set, the algorithm determines how well the point fits to the estimated model. If it fits well, that point is also considered as a hypothetical inlier. If sufficiently many points have been classified as hypothetical inliers relative to the estimated model, then we have a model which is reasonably good.However, it has only been estimated from the initial set of hypothetical inliers, so we reestimate the model from the entire set of point's hypothetical inliers. At the same time, we also estimate the error of the inliers relative to the model. This procedure is then repeated a fixed number of times, each time producing either a model which is rejected because too few points are classified as inliers or a refined model together with a corresponding error measure. In the latter case, we keep the refined model if its error is lower than the last saved model. AlgorithmThe generic RANSAC algorithm works as follows:input:data - a set of observed data pointsmodel - a model that can be fitted to data pointsn - the minimum number of data values required to fit the modelk - the maximum number of iterations allowed in the algorithmt - a threshold value for determining when a data point fits a modeld - the number of close data values required to assert that a model fits well to dataoutput:bestfit - model parameters which best fit the data (or nil if no good model is found)iterations := 0bestfit := nilbesterr := infinitywhile iterations <> d(this implies that we may have found a good model now testhow good it is)bettermodel := model parameters fitted to all points in maybeinliers and alsoinliersthiserr := a measure of how well model fits these pointsif thiserr <>increment iterationsreturn bestfitWhile the parameter values of t and d have to be calculated from the individual requirements it can be experimentally determined. The interesting parameter of the RANSAC algorithm is k.To calculate the parameter k given the known probability w of a good data value, the probability z of seeing only bad data values is used:which leads toTo gain additional confidence, the standard deviation or multiples thereof can be added to k. The standard deviation of k is defined asA common case is that w is not well known beforehand, but some rough value can be given. If n data values are given, the probability of success is wn. Advantages and disadvantagesAn advantage of RANSAC is its ability to do robust estimation of the model parameters, i.e., it can estimate the parameters with a high degree of accuracy even when outliers are present in the data set. A disadvantage of RANSAC is that there is no upper bound on the time it takes to compute these parameters. If an upper time bound is used, the solution obtained may not be the most optimal one.RANSAC can only estimate one model for a particular data set. As for any one-model approach when more two (or more) models exist, RANSAC may fail to find either one.ApplicationsThe RANSAC algorithm is often used in computer vision, e.g., to simultaneously solve the correspondence problem and estimate the fundamental matrix related to a pair of stereo cameras.ReferencesM. A. Fischler and R. C. Bolles (June 1981). "Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography". Comm. of the ACM 24: 381--395. doi:10.1145/358669.358692. David A. Forsyth and Jean Ponce (2003). Computer Vision, a modern approach. Prentice Hall. ISBN ISBN 0-13-085198-1.Richard Hartley and Andrew Zisserman (2003). Multiple View Geometry in Computer Vision, 2nd edition, Cambridge University Press.一、RANSAC算法介绍模型参数估计方法,如经典的最小二乘法,可以根据某种给定的目标方程估计并优化模型参数以使其最大程度适应于所有给定的数据集。
孟德尔随机化三大假设英文 解释
孟德尔随机化三大假设英文解释English: Mendel's three major assumptions in randomization are as follows:1. The Principle of Segregation: This assumption is based on the observation that an individual organism possesses two alleles for each gene and these alleles segregate randomly during the formation of gametes. According to Mendel, during gamete formation, the two alleles of a gene segregate from each other so that each gamete contains only one allele. This principle explains why traits can disappear in one generation and reappear in the next, as the alleles can combine in different ways in the offspring.2. The Principle of Independent Assortment: This assumption states that the segregation of alleles for one gene does not influence the segregation of alleles for other genes. According to Mendel, during gamete formation, the alleles for different genes segregate independently of each other, resulting in a random mixing of traits. This principle explains the inheritance patterns of traits that arecontrolled by multiple genes, as each gene independently contributes to the formation of traits.3. The Principle of Random Fertilization: This assumption suggests that the fusion of gametes during fertilization is a random process. According to Mendel, any sperm can fertilize any egg, regardless of the alleles they carry. This principle adds to the randomness of trait inheritance and increases the genetic variability within a population.These assumptions formed the basis of Mendel's laws of inheritance, which laid the foundation for understanding the principles of genetics. They highlighted the importance of randomness in genetic processes, emphasizing that the segregation, assortment, and fertilization of alleles are random events. Mendel's experiments with pea plants provided empirical evidence for these assumptions, enabling him to propose the laws of inheritance.中文翻译: 孟德尔在随机化方面的三个主要假设如下:1. 分离定律: 这个假设基于这样一个观察结果,即个体生物每个基因都拥有两个等位基因,这些等位基因在配子形成过程中随机分离。
点云算法试题
点云算法试题
以下是一些点云算法试题:
1. 什么是点云?
2. 请解释下采样算法中的体素网格(Voxel Grid)算法是如何
工作的。
3. 欧几里得聚类算法(Euclidean Clustering)如何将点云分成
不同的群集?
4. 移动最小二乘(Moving Least Squares)算法是用来做什么的?
5. RANSAC(Random Sample Consensus)算法是如何估计点
云中的几何形状的?
6. 请解释一下ICP(Iterative Closest Point)算法的工作原理。
7. 点云表面重建算法中的Marching Cubes算法是如何工作的?
8. 上采样算法中的插值是如何通过增加点的密度来重建点云的?
9. 点云配准算法中的ICP和配准矩阵变换是如何相互作用的?
10. 点云分割算法中的区域增长算法是如何将相邻的点聚合成
单个区域的?
这些问题涉及到点云处理的不同方面,包括采样、聚类、重建、配准和分割等。
希望能对您的点云算法知识有所帮助。
liblibai的采样方法 sampler method

liblibai的采样方法 sampler method LibLibAI是一个常见的机器学习库或框架。
由于我的信息截断时间,可能有一些新的库或框架我还未了解。
关于采样方法(Sampler Method)的具体信息取决于你使用的库或框架。
在机器学习中,采样通常涉及到从数据集中选择子集或生成新的样本。
不同的库和框架可能有不同的采样方法。
以下是一些通用的采样方法,但具体的实现方式取决于你所使用的库:
1. 随机采样(Random Sampling):
•从数据集中随机选择样本。
2. 过采样(Over-sampling):
•对数据集中的某些类别进行过采样,以平衡类别分布。
3. 欠采样(Under-sampling):
•对数据集中的某些类别进行欠采样,以平衡类别分布。
4. SMOTE(Synthetic Minority Over-sampling Technique):
•通过生成合成样本来进行过采样,特别用于处理类别不平衡问题。
5. 分层采样(Stratified Sampling):
•保持采样中的类别分布与整体数据集中的类别分布相似。
如果你正在使用某个特定的库,建议查阅该库的文档或源代码,以获取有关采样方法的详细信息。
在大多数机器学习库中,都提供了一些用于采样的工具或函数,帮助你处理不平衡数据集或优化模型性能。
2012六西格玛黑带考前精华36题答案及解析

2012六西格玛黑带考前精华36题答案及解析2012六西格玛黑带考前精华36题(含答案)1.某财务服务公司有4各不同的部门负责处理贷款业务,对该业务的衡量是采用每个部门的一组员工一周的5个工作日内每天进行处理的平均数量(连续数据,假设服从正态分布)。
通过方差分析,发现部门同业务处理能力有显著不同,但公司经理还想知道4个部门中任取2部门业务处理能力的比较状况,请问他应该选用如下的多重比较方法中的哪种方法?(A)A. Tukey’s整体误差率方法B. Fi sher’s个体误差率方法C. Dunnett’s整体误差率方法D. Hsu’s整体误差率方法2.对一个稳定的生产过程绘制控制图,已知当子组样本含量为2时,其下控制限LCL=70,上控制限UCL=82,问:当子组样本含量增加到8时,控制图的控制限应该变为:(C)A LCL=75,UCL=77B LCL=74,UCL=78C LCL=73,UCL=79D LCL=70,UCL=823.在某MSA分析中发现其容差百分比为60%,不满足MSA要求,黑带考虑利用重复测量降低MSA误差,以继续使用原测量系统。
请问,要将容差百分比降低到20%,最少要重复测量多少次:(D)A. 6次。
B.7次。
C.8次。
D.9次。
4.某企业拟购买一部关键设备,现有两个供应商(甲、乙)均可提供相同型号的设备,为了检验设备的质量,质量工程师对甲、乙两台设备进行了过程能力分析,结果发现,甲设备:Cp=1.8,Cpk=1.3,乙设备:Cp=1.31,Cpk=1.3。
假定甲乙设备价格相同,其它安装和服务也基本相同。
根据这一结果,我们可以判定:(A)A 甲设备比乙设备好一些,因为甲设备的Cp更高一些;B 甲设备和乙设备一样,因为甲设备和乙设备的Cpk相同;C 乙设备要比甲设备好一些,因为乙设备的Cp与Cpk接近,表明目标中心与分布中心基本重合D 以上结论都不对5.对生产的螺钉直径加以监控,可以得知过程是稳定的,螺钉直径是服从正态分布的。
六西格玛黑带试题
1.协助倡导者、企业高层领导筛选对企业来说至关重要的六西格玛项目,选择合适的人员,并在项目进行中培训和指导,主要是下述哪个角色的职责:A.绿带(GB)B.黑带(BB)C.资深黑带(MBB)D.业务负责人2.对某项目实行风险分析,琳决定预期的收益(或损失),并得到以下四种不相交的可能结果:结果A显示有34,000元的收益,并有0.25的发生概率结果B显示有120,000元的收益,并有0.40的发生概率结果C显示有40,000元的损失,并有0.10的发生概率结果D显示有100,000元的收益,并有0.25的发生概率则预期的收益(或损失)是:A.130,000元B.520,000元C.85,500元D.77,500元8.在六西格玛项目实施过程中,团队运用头脑风暴法时遇到了这样的问题:一些成员对另一些成员提出的想法表示异议,由此大家争论了起来。
这时,作为团队负责人,你应该:A.保持沉默,让大家继续争论B.请团队中的权威人士发言,就大家的争论做出评判C.制止争论,将各方的想法记录下来D.采用投票法,按多数人的意见形成决议10.在选定了六西格玛项目后,要编写项目特许任务书,一个特许项目任务书不应包括以下哪项内容:A.项目问题描述B.改进机会描述C.改进目标D.问题主要影响因素18.指数加权移动平均控制图(EWMA)适用于下列哪种场合:A.探测均值持续的较小漂移B.探测均值较大的漂移C.自相关过程D.探测均值较大的偏移和平滑数据19.己知过程能力指数Cp =1.5 , Cpk =1.4, Ppk =0.8,首先应该采取下列哪种措施:A.调整过程均值,使其接近公差中心B.调整公差限,使公差范围增大C.因Cp与Cpk近似相等,且都大于1.33,无需采取任何措施D.判定过程稳定性有问题,找出影响稳定的因素并消除,保持稳定过程,使其处于受控状态22.对离散型测量系统研究时,可以对名义值数据进行属性一致性分析,通常采用Kappa系数来表征结果的一致性,请问Kappa=O表明了什么?A.观测到的评价结果一致性很好B.观测到的评价结果的一致性可能与随机猜测的一致性相同C.观测到的评价结果比随机猜测的一致性耍稍好些D.观测到的评价结果无法判断是否具有一致性24.据统计某打字员每页的平均差错数为2个,假定差错的出现是随机的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Report Documentation Page Form Approved
OMB No. 0704-0188
Public reporting burden for the collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington VA 22202-4302. Respondents should be aware that notwithstanding any other provision of law, no person shall be subject to a penalty for failing to comply with a collection of information if it does not display a currently valid OMB control number.
1. REPORT DATE
MAR 1980 2. REPORT TYPE 3. DATES COVERED
00-03-1980 to 00-03-1980
4. TITLE AND SUBTITLE
Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography 5a. CONTRACT NUMBER
5b. GRANT NUMBER
5c. PROGRAM ELEMENT NUMBER
6. AUTHOR(S)5d. PROJECT NUMBER
5e. TASK NUMBER
5f. WORK UNIT NUMBER
7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES)
SRI International,333 Ravenswood Avenue,Menlo Park,CA,940258. PERFORMING ORGANIZATION REPORT NUMBER
9. SPONSORING/MONITORING AGENCY NAME(S) AND ADDRESS(ES)10. SPONSOR/MONITOR’S ACRONYM(S)
11. SPONSOR/MONITOR’S REPORT
NUMBER(S)
12. DISTRIBUTION/AVAILABILITY STATEMENT
Approved for public release; distribution unlimited
13. SUPPLEMENTARY NOTES
14. ABSTRACT
15. SUBJECT TERMS
16. SECURITY CLASSIFICATION OF:17. LIMITATION OF
ABSTRACT 18. NUMBER
OF PAGES
42
19a. NAME OF
RESPONSIBLE PERSON
a. REPORT unclassified
b. ABSTRACT
unclassified
c. THIS PAGE
unclassified
Standard Form 298 (Rev. 8-98)
Prescribed by ANSI Std Z39-18。