2020机器人考级真题试卷青少年机器人技术等级考试理论综合试卷(五级)
2020.12全国青少年机器人技术等级考试理论综合试卷(五级)
2020.12青少年机器人技术等级考试理论综合试卷(五级)分数:100 题数:30一、单选题(共20题,每题4分,共80分)1.通过shiftOut(dataPin,clockPin,bitOrder,value)函数向74HC595移位寄存器芯片写入数据,下列说法错误的是()。
DA. dataPin引脚和74HC595的Ds引脚相连;B. clockPin引脚和74HC595的SH_CP引脚相连;C. bitOrder表示输出位的顺序,分别为MSBFIRST和LSBFIRST;D. shiftOut函数输入数据时是并入串出。
2.ESP32 for Arduino中,Serial.printf()函数输出回车所对应的转义字符是()。
CA. \nB. \tC. \rD. \\3.执行下列程序后,串口监视器显示的值为()。
CA. 25B. 29C. 54D. 584.ESP32中断触发模式中,属于边沿触发的有()种。
BA. 2B. 3C. 4D. 55.下列外设中,ESP32 WROOM模组不具有的外设是()。
DA. UARTB. I2CC. 霍尔传感器D. 红外接收模组6.A、B两个设备进行UART串行通信,A设备的TX引脚连接到B设备的引脚为()。
BA. TXB. RXC. VCCD. TX 或 RX7.ESP32模拟输入ADC的分辨率最大值是()。
CA. 8位B. 9位C. 12位D. 16位8.ESP32程序中模拟输入的返回值在0~511之间,下列程序正确的是()。
AA. analogSetWidth(9);B. analogSetWidth(10);C. analogSetWidth(11);D. analogSetWidth(12);9.共阴数码管和74HC595芯片连接如下图所示,执行下列程序后,数码管显示的图形如图中红色所示,shiftout程序行[ ]内的数值为()。
AA. 0b1100111B. 0b10011000C. 0b11001D. 0b1110011010. 74HC595移位寄存器模块中,用于控制数据输入速度的引脚是( )。
2020年12月(二级)青少年机器人技术等级考试理论综合试卷
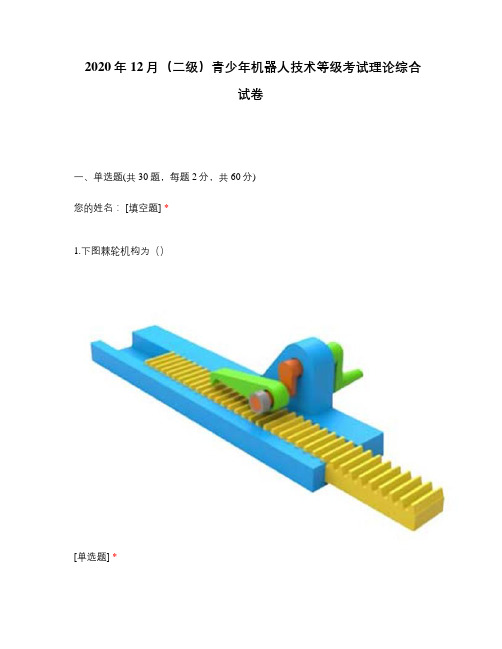
2020年12月(二级)青少年机器人技术等级考试理论综合试卷一、单选题(共30题,每题2分,共60分)您的姓名: [填空题] *_________________________________1.下图棘轮机构为()[单选题] *A. 摩擦式棘轮机构B. 内啮合棘轮机构C. 双动式棘轮机构D. 齿式棘轮机构(正确答案)答案解析:图中有齿轮以及棘爪,是齿式棘轮机构的拓展;棘轮机构按照棘轮形状分为摩擦式棘轮和齿式棘轮;2.如下图该机械结构可实现哪种运动方式()[单选题] *A. 往复摆动B. 单向持续转动C. 单向间歇性运动(正确答案)D. 双向持续转动答案解析:图中是棘轮机构,棘轮机构的特点是单向间歇性运动;3.关于下图机械结构,以下说法错误的是()[单选题] *A. AB为摇杆(正确答案)B. BC为连杆C. CD做反复摆动运动D. AD为机架试题答案解析:图中所示为曲柄摇杆机构;曲柄摇杆的组成为曲柄和摇杆,曲柄是圆周运动,摇杆是反复摆动;故选A;4.等人制造的木构水运仪象台是当时世界上最先进的天文钟() [单选题] *A. 北宋时期苏颂(正确答案)B. 春秋时期鲁班C. 春秋时期墨子D. 三国时期诸葛亮答案解析:北宋时期5.以下传动方式可以实现异面传动的是() [单选题] *A. 链传动B. 皮带传动(正确答案)C. 齿轮传动、链传动传动均可D. 链传动、皮带传动均可答案解析:C齿轮传动中的冠齿轮可实现异面传动;B皮带传动可以不在一个平面内传动;6.下图机构为()[单选题] *A. 外啮合齿式棘轮机构B. 内啮合齿式棘轮机构(正确答案)C. 外啮合摩擦式棘轮机构D. 内啮合摩擦式棘轮机构答案解析:图中机构为内啮合齿式棘轮机构;齿式棘轮机构分为外啮合和内啮合两类;7.对于图中机构说法正确的是()[单选题] *A. 这是尖顶从动件盘形凸轮机构(正确答案)B. 这是滚子从动件盘形凸轮机构C. 这是平底从动件盘形凸轮机构D. 这不是凸轮机构试题答案解析:图中机构是凸轮机构,所以D选项错误;是尖顶从动件盘形机构;8.凸轮机构按照从动件形状分类不包括() [单选题] *A. 平底从动件B. 尖顶从动件C. 滚子从动件D. 扇形从动件试题(正确答案)答案解析:凸轮机构按照从动件分为平底从动件、尖顶从动件和滚子从动件;9.若四杆机构中最短杆与最长杆长度之和小于等于其余两杆长度之和,不能构成()[单选题] *A. 双摇杆机构B. 双曲柄机构C. 曲柄摇杆机构D. 曲柄滑块机构(正确答案)答案解析:;D选项曲柄滑块机构不属于平面四连杆机构;10.关于电流、电压不正确的是() [单选题] *A. 电流的单位为安培B. 中国家用电压为330V(正确答案)C. 电压的单位为伏特D. 人体安全电压是36V以下试题答案解析:中国家用电压为220V11.飞机起飞时,下列说法错误的是() [单选题] *A. 机翼上侧气流速度快B. 机翼上侧曲线弧度大于下侧C. 机翼上侧气压低D. 机翼上侧采用的金属材料更重试题(正确答案)答案解析:D选项,机翼上的材料应该更轻;12.以下哪个与其它三个不属于一种分类方式() [单选题] *A. 重力锁合凸轮机构B. 弹力锁合凸轮机构C. 几何锁合凸轮机构D. 盘形凸轮机构试题(正确答案)答案解析:D盘形凸轮机构属于凸轮按外形分类的;13.如下图所示小玩具,该玩具采用了哪种机械结构()[单选题] *A. 连杆机构B. 凸轮机构(正确答案)C. 棘轮机构D. 齿轮试题答案解析:图中所示满足凸轮机构的特点;14.关于“伯努利定理”不正确的是() [单选题] *A. 适用于空气B. 适用于液体C. 流体速度加快时,物体与流体接触的界面上的压力会减小,D. 流体速度加快时,物体与流体接触的界面上的压力会增大,试题(正确答案)答案解析:伯努利定律适用于空气;15.下图棘轮机构中,②号是()[单选题] *A. 棘轮B. 摆杆C. 棘爪(正确答案)D. 机架试题答案解析:图中为棘轮机构;棘轮机构的组成有棘轮、主动棘爪、止回棘爪、主动摆杆四个组成部分;16.关于曲柄摇杆机构,以下说法正确的是() [单选题] *A. 当摇杆作为主动件(输入件),圆周运动转化为往复摆动B. 曲柄摇杆机构是高副机构C. 曲柄摇杆机构是凸轮机构D. 曲柄摇杆机构是铰链四杆机构试题(正确答案)答案解析:A选项正确,主动件与从动件可以相互转化;D曲柄摇杆不是四杆机构;17.下列不会产生伯努利效应的是() [单选题] *A. 两张纸之间吹气B. 飞机升降C. 地铁进站D. 用滑雪板滑雪试题(正确答案)答案解析:伯努利效应是两张纸之间吹气实验;18.以下机构属于低副机构的是() [单选题] *A. 摩擦式凸轮机构B. 棘轮机构C. 不完全齿轮机构D. 连杆机构试题(正确答案)答案解析:低副机构是面接触,精准度不高,选D;19.关乎皮带交叉传动以下说法正确的是() [单选题] *A. 带轮两侧的皮带接近平行B. 两带轮转向相反(正确答案)C. 带轮转向关系不能确定D. 是指带轮旋转中心轴交叉试题答案解析:皮带交叉传动,两轮转向相反;皮带平行传动,两轮转向相同;20.关于曲柄滑块机构与曲柄摇杆机构的说法正确的是() [单选题] *A. 曲柄滑块机构主动件为曲柄B. 曲柄滑块机构主动件为滑块C. 都能实现圆周运动和往复运动的相互转化(正确答案)D. 曲柄滑块机构为平面四杆机构,曲柄摇杆机构不是平面四杆机构答案解析:C选项,曲柄摇杆机构不是往复运动;21.尖顶从动件盘形凸轮机构的特点不包括() [单选题] *A. 能与任意复杂的凸轮轮廓保持接触B. 尖端处摩擦大C. 极易磨损D. 能应用在传力较大的高速机构上(正确答案)答案解析:尖顶从动件属于高副机构;特点不能应用在传力较大的高速机构;22.1966年,人工智能研究中心发明了谢克机器人(ShakeTheRobot),它是第一台移动机器人() [单选题] *A. 牛津大学B. 哈佛大学C. 斯坦福大学(正确答案)D. 麻省理工学院试题答案解析:斯坦福大学发明谢克机器人,是第一台移动机器人;23.以下是后驱车缺点的是() [单选题] *A. 转弯半径较大B. 加速性差C. 重心分布不均匀D. 价格较高试题(正确答案)答案解析:后驱车的缺点是价格高;ABC为前驱车特点;24.两个物体互相接触并具有相对运动趋势,但仍处于静止状态,在接触面会产生哪种摩擦力() [单选题] *A. 静摩擦力(正确答案)B. 滚动摩擦力C. 滑动摩擦力D. 不产生摩擦力试题答案解析:两物体有相对运动的趋势,属于静摩擦力,选A;25.以下是前驱车优点的是() [单选题] *A. 不会产生扭矩转向问题B. 零部件少,成本低(正确答案)C. 加速性能好D. 重量分布更加均匀试题答案解析:前驱车的优点就是成本低;ACD为后驱车的优点;26.如下图所示皮带传动,小皮带轮端接电机,以下说法正确的是()[单选题] *A. 主动轮和从动轮转动方向相反B. 主动轮和从动轮的转动方向相同(正确答案)C. 从动轮的转速大于主动轮的转速D. 这是皮带交叉传动试题答案解析:图中为平行皮带传动,两皮带轮转向相同,从动轮转速小于主动轮转速;B选项说法正确;27.如图,某凸轮机构采用了下列凸轮,说法正确的是()[单选题] *A. 它是槽凸轮机构(正确答案)B. 它是重力锁合凸轮机构C. 它这是弹力锁合凸轮机构D. 它是共轭凸轮机构试题答案解析:图中是槽式凸轮机构,属于几何锁合凸轮机构;28.汽车的轮胎上都有花纹,主要是为了() [单选题] *A. 增大摩擦力(正确答案)B. 美观C. 降低成本D. 减轻重量试题答案解析:轮胎中的花纹是为了增加摩擦力,防止行驶过程中打滑;29.与带传动相比较,齿轮传动的缺点是什么() [单选题] *A. 无法准确传递动力B. 承载能力小C. 传动效率低D. 不适合远距离传动试题(正确答案)答案解析:齿轮传动不能远距离传动,但是传动较为精准;30.1948年诺伯特维纳出版了《控制论》,阐述了机器中的通信和控制机能与人的神经、感觉机能的共同规律,率先提出以计算机为核心的, [单选题] *A. 自动化工厂(正确答案)B. 自动行驶汽车C. 智能机器人D. 互联网技术试题答案解析:诺伯特的控制论,阐述控制机可以实现自动化;把控制论看作是一门研究机器、生命社会中控制和通讯的一般规律的科学;二、多选题(共5题,每题4分,共20分)31.单位面积下物体所受的压力相当于压强,那么增大压强的方法有哪些() *A. 在受力面积不变的情况下,增加压力,(正确答案)B. 在受力面积不变的情况下,减少压力,C. 压力不变的情况下,减小受力面积,(正确答案)D. 压力不变的情况下,增大受力面积答案解析:面积不变,重力越大,压力越强;重力不变,面积越小,压力越强;32.以下哪些不是双摇杆机构的动作特征() *A. 左右两杆做圆周运动(正确答案)B. 当左侧杆做圆周运动时,右侧杆做摇摆运动(正确答案)C. 当左侧杆做摇摆运动时,右侧杆做圆周运动(正确答案)D. 左右两杆都做摇摆运动答案解析:A选项,左右两杆做左右摆动;BC选项,讲的是曲柄摇杆运动;33.凸轮机构的优点有哪些() *A. 结构简单(正确答案)B. 结构紧凑(正确答案)C. 不易磨损D. 凸轮轮廓加工容易答案解析:凸轮机构属于高副机构,易磨损;凸轮机构加工复杂;34.以下是皮带传动优点的是() *A. 可实现远距离传动(正确答案)B. 可以精确传递动力C. 可保护机械(正确答案)D. 比较适合近距离传动,传动力大答案解析:皮带传动适合远距离传动、可以有一定的保护作用;选AC;35.努力向上推动静止在斜面上的物体,但物体仍未移动,下列哪些属于物体所受的力() *A. 重力(正确答案)B. 滑动摩擦力C. 推力(正确答案)D. 支持力(正确答案)答案解析:推不动的物体是摩擦力大于推力;物体有自身的重力、推力、地面的支持力;三、判断题(共10题,每题2分,共20分)36.皮带传动装置动力传递会产生延迟 [判断题] *对(正确答案)错答案解析:皮带传动装置的精准度不高,适合远距离传动;37.四杆机构中两个连架杆均为摇杆,均做往复摆动,则为双摇杆机构 [判断题] *对(正确答案)错答案解析:四连杆机构黄色和蓝色均为摇杆;38.根据伯努利定理,在两张纸之间吹气,因为两张纸之间空气流动速度加快所以两张纸会往外张 [判断题] *对错(正确答案)答案解析:根据伯努利定律,空气流速越快,压强越小,跟水流一样,物体由压强大往压强小地方运动;39.电动机是将机械能转化为电能的机械装置 [判断题] *对错(正确答案)答案解析:电机是将电能转化为机械能;40.1939年,德国西屋电气公司制造出家用机器人,让人们对家用机器人更加憧憬[判断题] *对错(正确答案)答案解析:目前尚未应用家用机器人;41.链传动中的链轮可以不在同一平面内 [判断题] *对错(正确答案)答案解析:链传动必需在同一平面内运转;42.人在站在冰面上容易打滑,是因为冰面很光滑,接触面摩擦系数小导致的 [判断题] *对(正确答案)错答案解析:摩擦系数越小越容易打滑,说法正确;43.近代机器人研究始于20世纪中期(对)先后出现了三代机器人 [判断题] *对错(正确答案)答案解析:目前正在研究的就是第三代机器人;44.链传动在突然变速时不容易断裂 [判断题] *对错(正确答案)答案解析:链传动突然的变速会导致链条断裂;45.自行车大链轮和小链轮的旋转方向相同 [判断题] *对(正确答案)错答案解析:自行车是链条传动,链轮旋转方向同向;。
2023年12月青少年机器人技术等级考试理论试卷(五级
2023年12月青少年机器人技术等级考试理论试卷(五级)考试时间:90分钟试卷总分:100分请在答题纸上写下您的姓名和考号,并保持答卷整洁。
一、选择题(共20题,每题2分,共40分)请在括号内选择正确的答案,并将选项代号填入答题纸上对应的选项。
1.机器人技术的发展历史可追溯到哪个年代?A. 19世纪初B. 20世纪初C. 21世纪初D. 22世纪初2.机器人技术的三大支柱是哪些方面的知识?A. 人工智能、控制系统、机械工程B. 电子工程、计算机科学、心理学C. 物理学、化学、生物学D. 经济学、管理学、市场营销学3.下列哪个元素不属于机器人技术的核心要素?A. 传感器技术B. 视觉识别技术C. 音频处理技术D. 运动控制技术4.以下哪个传感器常用于机器人的环境感知?A. 摄像头B. 加速度计C. 温度传感器D. 红外线传感器5.机器人领域常用的编程语言是?A. PythonB. JavaScriptC. HTMLD. C++6.控制系统是机器人技术中的关键,下列哪项不属于机器人的控制系统?A. 语音识别控制系统B. 手柄控制系统C. 自动避障控制系统D. 运动规划控制系统7.机器人技术在哪些领域得到了广泛应用?A. 工业制造B. 医疗健康C. 军事安全D. 所有以上领域8.机器人技术在医疗健康领域的应用包括哪些方面?A. 手术辅助B. 康复训练C. 人机交互D. 所有以上方面9.下列哪个机器人是由波士顿动力公司开发的?A. 人形机器人AtlasB. 家用机器人RoombaC. 救援机器人CuriosityD. 工业机器人UR510.机器人技术的发展对社会产生了哪些影响?A. 减少了劳动力需求B. 提高了生产效率C. 增加了就业机会D. 所有以上影响二、填空题(共5题,每题4分,共20分)请将答案填写在答题纸上。
1.机器人的三个基本要素是感知、决策和执行。
2.机器人的传感器用于感知环境,并通过传递信息给控制系统。
全国青少年机器人技术等级考试-五级实操题及评分标准202312
青少年机器人技术等级考试(五级)实操试卷及评分标准一、实操考题主题:按键控制心形图案交互显示器件:ESP32主控板1块,按键模块1个,8x8LED点阵1个,74HC595移位寄存器芯片(或模块)及相应辅件。
以上模块也可使用分立器件结合面包板搭建。
任务要求:通过按键控制8x8LED点阵屏在黑屏-小心形图案-大心形图案之间循环切换显示,具体任务要求如下:(1)程序启动后,8x8LED点阵最外侧四边的LED灯点亮,中间区域LED 灯熄灭;(2)第1次点击按键,8x8LED点阵屏所有的LED熄灭,呈现黑屏状态;(3)第2次点击按键,8x8LED点阵屏显示小心形图案;(4)第3次点击按键,8x8LED点阵屏显示大心形图案;(5)依次类推,当再次点击按键时,8x8LED依次在黑屏、小心形图案、大心形图案之间循环切换显示;(6)按键输入须进行消抖处理。
(7)程序采用Arduino C/C++代码编写,不得使用外部库调用;(8)未作规定处可自行处理,无明显与事实违背即可。
说明:请考生在考试结束前,按照如下要求提交相关文件。
(1)将程序放在一个文件夹中,压缩为1个“rar或zip”格式文件,并命名为:DJKS5_身份证号,大小5M以下;(2)将程序文件通过“上传附件”按钮进行上传;(3)程序编写过程中不得打开其它示例程序,如发现,实操成绩按照0分处理。
参考资料:数组heartB[]和heartS[]分别为大小心形的点阵数据。
编程时可参考使用。
byte heartB[] = {0x99, 0x00, 0x00, 0x00, 0x81, 0xC3, 0xE7, 0xFF};byte heartS[] = {0xFF, 0xDB, 0x81, 0x81, 0xC3, 0xE7, 0xFF, 0xFF};二、评分组成(共100分)1、电路搭设(20分)元器件:(1) 装置中包含按键模块;(2分)(2) 装置中包含8x8LED点阵;(2分)(3)装置中包含74HC595移位寄存器模块或芯片;(2分)电路搭设:(4)按键模块与主控板正确连接;(4分)(5)8x8点阵与74HC595移位寄存器模块或芯片正确连接;(5分)(6)74HC595移位寄存器模块或芯片与主控板正确连接。
2024年9月青少年机器人技术等级考试理论综合试卷六级真题(含答案)

2024年9月青少年机器人技术等级考试理论综合试卷六级真题(含答案)分数:100 题数:30一、单选题(共20题,共80分)。
1.使用 ESP32 for Arduino SPI 类库,下列选项中,具有设置时钟模式功能的成员函数是?()。
A. SPI.setMode()B. SPI.setBitOrder()C. SPI.setDataMode()D. SPI.setCLock()标准答案:C。
2.题HTML文档由标签和文本内容组成,下列选项中,用于标记网页头部的标签是?()。
A. <title>B. <head>C. <body>D. <p>标准答案:B。
3.题ESP32 for Arduino 提供的 WiFi类库的成员函数中,用于设定ESP32主控板为AP模式的成员函数是?()。
A. WiFi.scanNetWorks()B. WiFi.softAP()C. WiFi.begin()D. WiFi.SSID()标准答案:B。
4.下列选项中,可获取本机电脑止的命令是?()。
A. dirB. msconfigC. pingD. ipconfig标准答案:D。
5.下图是三相反应式步进电机连续节拍工作示意图,图示所对应的工作方式为?()。
A. 三相单三拍B. 三相单六拍C. 三相双三拍D. 三相双六拍标准答案:C。
6.关于 ESP32 for Arduino SPI类库成员函数begin()的功能,下列描述正确的是?()。
A. 启动SPI通信事务B. 启动SPI数据传送C. 设置SPI的时钟模式D. 按照默认参数初始化SPI接口标准答案:D。
7.题PID控制器是比例-积分-微分控制器的简称,下列选项中,可消除稳态误差的控制器有?()。
A. P控制B. 1控制C. D控制D. ID控制标准答案:B。
8.关于 ESP32 for Arduino I2C类库成员函数requestFrom()的功能,下列描述正确的是?()。
202303青少年机器人技术等级考试理论综合试卷(五级)

青少年机器人技术等级考试理论综合试卷(五级)分数:100 题数:30一、单选题(共20题,共80分)1.0x35 & 7的结果是?()A.5B.55C.50D.54试题编号:55526118试题类型:单选题标准答案:A试题难度:试题解析:考生答案:B考生得分:0是否评分:已评分评价描述:2.一般状况下,关于主控板的工作电压,下面说法正确的是?()A.Arduino UNO/Nano 和ESP32 WROOM模组的工作电压均为5V。
B.Arduino UNO/Nano 和ESP32 WROOM模组的工作电压均为3.3V。
C.Arduino UNO/Nano的工作电压是5V,ESP32 WROOM模组的工作电压是3V。
D.Arduino UNO/Nano的工作电压是5V,ESP32 WROOM模组的工作电压是3.3V。
试题编号:55525399试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:3.ESP32 for Arduino采用LEDC方式进行模拟输出时,将指定通道的PWM信号输出到GPIO 引脚的函数是?()A.ledcSetup()B.ledcAttachPin()C.ledcDetachPin()D.ledcWrite()试题编号:55525618试题类型:单选题标准答案:B试题难度:试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:4.ESP32 for Arduino程序如下,串口监视器显示的结果是?()A.10 - 11B.a - 11C.a - bD.10 - B试题编号:55526039试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:5.0x42 >> 2的值是?()A.0B.10C.16D.264试题编号:55526086试题类型:单选题标准答案:C试题难度:试题解析:考生答案:D考生得分:0是否评分:已评分评价描述:6.ESP32 for Arduino程序如下,串口监视器显示的结果是?()A.10B.11C.34D.45试题编号:55525992试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:7.通过shiftOut函数向74HC595移位寄存器芯片DS引脚发送数据,部分程序及移位寄存器中的数据如下,程序变量val的值是?()A.0xAAB.0x55C.55D.100试题编号:55526305试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:8.下列程序执行后,串口监视器显示的相应内容是?()A.ABB.CABCC.ABCD.ABCABC试题编号:55526196试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:9.ESP32 for Arduino,运算符sizeof(int)的返回值为是?()A.1B.2C.4D.8试题编号:55525446试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:10.74HC595移位寄存器芯片的工作原理,下列选项中,描述正确的是?()A.并入并出B.并入串出C.串入串出D.串入并出试题编号:55525805试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:11.下列程序执行后,在如下图所示的串口监视器窗口中,输入12+34,然后点击发送按钮,串口监视器窗口显示的内容为?()A.3B.4C.5D.46试题编号:55526399试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:12.ESP32主控芯片中核(core)的数量是?()A.1个B.2个C.3个D.4个试题编号:55525368试题类型:单选题标准答案:B试题难度:试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:13.Serial类库的成员函数中,从串口缓冲区读取数据的成员函数是?()A.Serial.begin()B.Serial.println()C.Serial.read()D.Serial.Write()试题编号:55526149试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:14.ESP32 for Arduino函数ledcSetup(channel,freq,bit_num)中,freq的含义是?()A.设置PWM的频率B.设置PWM的分辨率C.设置PWM的输出通道号D.设置PWM的占空比试题编号:55525649试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:15.ESP32 for Arduino,读取按键开关S1的返回值,电路搭设如图所示,程序pinMode(4,mode);中mode的值应是?()A.INPUTB.OUTPUTC.INPUT_PULLUPD.INPUT_PULLDOWN试题编号:55525774试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:16.电路搭设和对应的程序如下,当按键开关按下后,LED灯点亮,程序中A和B分别为?()A.INPUT_PULLUP HIGHB.INPUT_PULLUP LOWC.INPUT_PULLDOWN HIGHD.INPUT_PULLDOWN LOW试题编号:55526352试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:17.下列传感器中,常用于电机转速检测的传感器是?()A.电位器B.热释电模块C.电容触碰传感器D.霍尔传感器试题编号:55525727试题类型:单选题标准答案:D试题难度:试题解析:考生答案:A考生得分:0是否评分:已评分评价描述:18.ESP32 for Arduino采用DAC外设进行模拟输出时,所对应的函数是?()A.adcWrite()B.dacWrite()C.analogWrite()D.ledcWrite()试题编号:55525696试题类型:单选题标准答案:B试题难度:试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:19.ESP32程序中模拟输入对应如下语句,变量potVal的返回值的范围是?()A.0~1B.0~511C.0~1023D.0~4095试题编号:55526446试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:20.2022年底,OpenAI发布了新一代聊天机器人模型,推动人工智能应用达到一个新的高度,该模型的名称是?()A.ChatGPTB.KerasC.AlphaFoldD.Transformer试题编号:55525321试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:二、多选题(共5题,共10分)21.下列选项中,UART数据帧中必须包含的有?()A.起始位B.校验位C.数据位D.停止位试题编号:55525883试题类型:多选题标准答案:A|C|D试题难度:试题解析:考生答案:A|D|C考生得分:2是否评分:已评分评价描述:22.ESP32 for Arduino,电路如图所示,当按键按下时触发中断,对应的中断触发模式有?()A.ONLOWB.CHANGEC.RISINGD.FALLING试题编号:55525852试题类型:多选题标准答案:B|C试题难度:一般试题解析:考生答案:B|C考生得分:2是否评分:已评分评价描述:23.ESP32主控芯片中,可实现模拟输出的外设有?()A.LEDCB.SigmaDeltaC.DACD.ADC试题编号:55525477试题类型:多选题标准答案:A|B|C试题难度:一般试题解析:考生答案:A|C|B考生得分:2是否评分:已评分评价描述:24.与Arduino UNO/Nano主控板相比,下列选项中,ESP32主控芯片所独有的外设是?()A.触摸传感器B.蓝牙C.霍尔传感器D.WiFi试题编号:55525524试题类型:多选题标准答案:A|B|C|D试题难度:试题解析:考生答案:A|B|D考生得分:0是否评分:已评分评价描述:25.下列选项中,可实现将整形变量val的值翻倍的表达式有?()A.val += val;B.val *= 2;C.val <<= 1;D.val >>= 1;试题编号:55526227试题类型:多选题标准答案:A|B|C试题难度:一般试题解析:考生答案:A|B|C考生得分:2是否评分:已评分评价描述:三、判断题(共5题,共10分)26.UART发送数据时,数据位是低位先发(LSB)。
2020机器人技术等级考试理论综合试卷(五级)

201912青少年机器人技术等级考试理论综合试卷(五级)本试卷从考试酷examcoo网站导出,文件格式为mht,请用WORD/WPS打开,并另存为doc/docx格式后再使用试卷编号:1203988试卷录入者:玩得趣科教中心(玩得趣科教中心)试卷总分:100出卷时间:2020-05-19 09:55答题时间:45分钟分数:100 题数:30一、单选题(共20题,共80分)1.下列运算符中不是位操作符的是?( )[4分]A.&B.|C.^D.!参考答案:D2.将数3以二进制输出串口监视器串口,程序Serial.println(3,format);中,format应为?( )[4分]A.BINB.OCTC.HEXD.DEC参考答案:A3.通过下面的程序控制LED灯的亮度,如果控制LED灯亮度最亮,合理的val应该为?( )ledcSetup(0,5000,7);ledcAttachPin(8,0);ledcWrite(0,val);[4分]A.0B.127C.255D.1023参考答案:B4.程序执行后val的值是?( )int val=0x47;bitSet(val,4);[4分]A.0x00B.0x47C.0x57D.0x4F参考答案:C5.按键开关模块中按键开关为上拉电阻电路,程序中需要把按键模块按下作为中断触发源,对应的中断触发模式为?( )[4分]A.RISING()B.FALLING()C.ONHIGH()D.ONLOW()参考答案:B6.下列移位运算符将数0b11乘以4,正确的写法是?( )[4分]A.0b11<<4B.0b11>>4C.0b11<<2D.Ob11>>2参考答案:C7.ESP32 for Arduino中,运行程序Serial.println(sizeof(int))的结果是?( )[4分]A.0B.1C.2D.4参考答案:D8.ESP32 for Arduino中,设置模拟输入信号的数值范围在0~1023之间,采用的函数是?( )[4分]A.analogRead()B.analogWrite()C.analogSetWidth()D.ledcSetup()参考答案:C9.ESP32 for Arduino中,程序Serial.printf();中代表浮点数输出的格式字符为?( )[4分]A.%oB.%dC.%xD.%f参考答案:D10.常用的ESP32 WROOM模组集成了ESP32芯片、( )、天线和其它精密原件。
全国青少年机器人技术等级考试模拟试题
全国青少年机器人技术等级考试模拟试题一.单选题(20题,每个3分)1.下列图片中,哪个不是机器人()AB.CD【正确答案】2.机器人的英文单词是()A.botreB.boretC.robot【正确答案】D.rebot3.机器人结构中,起着支撑作用的部件是()A.机座【正确答案】B.机体C.腰部D.臂部4.以下说法中不正确的是()A.人类智能是与生俱来的B.人工智能是人类赋予的C.机器人不属于人工智能【正确答案】D.人工智能是模仿人类智能5.下列多边形中,最稳定的多边形是()A【正确答案】BCD6.下面哪种结构放在地面上最容易倾倒()ABC【正确答案】D7.盘山公路总是修的弯弯曲曲,环绕山坡盘山而上,而不是从山下直通山顶,这是为了()A.美观B.省距离C.省力【正确答案】D.经济8.如下图所示,利用定滑轮匀速提升重物G,向三个方向拉动的力分别是F1、F2、F3,三个力的大小关系是()A.F1最大B.F2最大C.F3最大D.一样大【正确答案】9.使用轮轴时,下面说法中错误的是()A.轮轴只能省力一半【正确答案】B.动力作用在轮上可以省力C.动力作用在轴上不能省力D.使用轮半径与轴半径之比为2:1的轮轴时,可以省力一半(动力作用在轮上)10.下图中不属于滑轮组的是()ABC【正确答案】D11.如下图所示,人们可以很轻松的将水桶从水井中提出,是利用了()机器。
A.轮轴【正确答案】B.滑轮C.斜面D.螺旋12.在你学过的简单机械中,正常使用时,既可能省力又可能费力的机械是()A.杠杆【正确答案】B.动滑轮C.定滑轮D.滑轮组13.下图中,沿着哪个斜面向上拉动小车最省力()ABCD【正确答案】14.木工师傅使用斧头作为工具,是利用()能省力的原理。
A.滑轮B.轮轴C.斜面【正确答案】D.杠杆15.使用下列简单机械,为了省力的是()A.龙舟比赛用的船桨B.开瓶用的瓶起子【正确答案】C..理发用的剪刀D.旗杆顶的定滑轮16.下列说法不正确的是()A.利用机械既可以减轻体力劳动,又可以提高工作效率B.杠杆是一种简单的机械,杆的形状可以是直的,也可以是弯曲的C.滑轮是属于杠杆变形的一种简单机械D.以上说法均不正确【正确答案】17.关于力臂,下列说法正确的是()A.支点到动力作用点的距离叫动力臂B.支点到阻力作用点的距离叫阻力臂C.支点到力的作用线的垂直距离叫力臂【正确答案】D.杠杆的力臂一定在杠杆之上18.关于轮轴的描述,下列说法正确的是()A.轮轴与杠杆没有任何关系B.轮轴就是轮子C.轮轴就是根轴D.轮轴工具的外形不一定是圆形的,但受力作用后的运动轨迹一定是圆形的【正确答案】19.有一对传动齿轮,主动轮的转速480转每分钟,主动轮的齿数是20,从动轮的齿数是40,从动轮的转速是()转每分钟。
2020年12月青少年机器人技术等级考试五级理论综合试卷
青少年机器人技术等级考试理论综合试卷(五级)一、单选题(共20题,共80分)1. 下列运算符中不是位操作符的是?()A. &B. |C. ^D. !答案:D2. 将数3以二进制输出串口监视器串口,程序Serial.println(3,format);中,format应为?()A. BINB. OCTC. HEXD. DEC标准答案:A3. 通过下面的程序控制LED灯的亮度,如果控制LED灯亮度最亮,合理的val应该为?()ledcSetup(0,5000,7);ledcAttachPin(8,0);ledcWrite(0,val);A. 0B. 127C. 255D. 1023标准答案:B解析:bit_num:占空比的分辨率,范围是1-16。
如设置为8位的分辨率,控制LED的亮度从0-255变化。
4. 程序执行后val的值是?()int val=0x47;bitSet(val,4);A. 0x00B. 0x47C. 0x57D. 0x4F标准答案:C解析:val是01000111,bitSet函数对指定位设置为1,在这里是从右往左第四位,从0开始,所以是01010111,转换为16进制是0X575. 按键开关模块中按键开关为上拉电阻电路,程序中需要把按键模块按下作为中断触发源,对应的中断触发模式为?()A. RISING()B. FALLING()C. ONHIGH()D. ONLOW()标准答案:B解析:因为上拉电阻,按键按下是从高电平变为低电平,所以是下降沿触发FALLING,答案是B6. 下列移位运算符将数0b11乘以4,正确的写法是?()A. 0b11<<4B. 0b11>>4C. 0b11<<2D. Ob11>>2标准答案:C解析:左移1位是乘以2,乘以4是左移2位,选C7. ESP32 for Arduino中,运行程序Serial.println(sizeof(int))的结果是?()A. 0B. 1C. 2D. 4标准答案:D解析:int的字节数是4,所以是选D8. ESP32 for Arduino中,设置模拟输入信号的数值范围在0~1023之间,采用的函数是?()A. analogRead()B. analogWrite()C. analogSetWidth()D. ledcSetup()标准答案:C,解析:analogSetWidth(bits)函数是设置analogRead函数的取样分辨率,bits的取值范围是9-12,当设为9时,analogRead函数的取值范围是0-511;9. ESP32 for Arduino中,程序Serial.printf();中代表浮点数输出的格式字符为?()A. %oB. %dC. %xD. %f标准答案:D解析:浮点数输出是f,整数输出是d,16进制数是x,8进制数是o10. 常用的ESP32 WROOM模组集成了ESP32芯片、( )、天线和其它精密原件。
全国青少年机器人技术等级理论(五级)试卷-xxxxxxxx
全国青少年机器人技术等级理论(五级)试卷-xxxxxxxx全国青少年机器人技术等级考试理论综合试卷(五级)测试卷分数:100.00题数:30一、单选题共20题,每题4分,共80分)1.ESP32主控板的工作电压是()A、3.3VB、5VC、3VD、3.6V试题编号:xxxxxxxxxxxxxxxx5题型:单选题答案:A难度:一般试题解析:2.ESP32芯片处理器的位数是()A、8位B、16位C、32位D、64位试题编号:xxxxxxxxxxxxxxxx6题型:单选题答案:C难度:一般试题解析:3.ESP32主控板“EN按键”的功能是()A、暂停B、重新启动C、进入编程形式D、关机模式试题编号:xxxxxxxxxxxxxxxx2题型:单选题谜底:B难度:普通试题解析:4.有关UART描述毛病的选项是()A、能够发送数据B、能够承受数据C、不成以同时发送和承受数据D、由RX和TX两个端口组成试题编号:xxxxxxxxxxxxxxxx0题型:单选题答案:C难度:一般试题剖析:5.sizeof()是()A、运算符B、函数C、变量D、常量试题编号:xxxxxxxxxxxxxxxx1题型:单选题答案:A难度:一般试题剖析:6.UART串口通信中,数据接收端引脚为()A、RXB、TXC、GNDD、VCC试题编号:xxxxxxxxxxxxxxxx9题型:单选题谜底:A难度:普通试题解析:7.ESP32 for Arduino中,printf()函数代表十六进制整数输出的格式字符为()A、%oB、%dC、%xD、f试题编号:xxxxxxxxxxxxxxxx4题型:单选题谜底:C难度:普通试题解析:8.ESP32 for Arduino外部中断触发有()种模式。
A、3B、4C、5D、6试题编号:xxxxxxxxxxxxxxxx3题型:单选题谜底:C难度:普通试题剖析:9.Serial库的成员函数中,从串口缓冲区读取数据的成员函数是()A、Serial.begin()B、Serial.println()C、Serial.read()D、Serial.Write()试题编号:xxxxxxxxxxxxxxxx9题型:单选题答案:C难度:一般试题解析:10.ESP32芯片内部ADC的进度是多少位()A、8B、10C、12D、16试题编号:xxxxxxxxxxxxxxxx9题型:单选题谜底:C难度:一般试题解析:11.0bb0101的结果是()A、0111B、0110C、1010D、0001试题编号:xxxxxxxxxxxxxxxx4题型:单选题谜底:D难度:一般试题解析:12.关于Serial.avaiable()函数的说明正确的是()A、判断串口是否可用B、读取串口缓冲区内的内容C、清除串口缓冲区内的内容D、返回串口缓冲区内字符的个数试题编号:xxxxxxxxxxxxxxxx3题型:单选题答案:D难度:一般试题剖析:13.ESP32forArduino中,执行模拟输出分辩率设置步伐analogSetWidth(10),analogRead()函数的返回值规模是()A、0~256B、0~511C、0~1023D、0~4096试题编号:xxxxxxxxxxxxxxxx7题型:单选题谜底:C难度:一般试题解析:lis()函数返回值的单元是()A、秒B、毫秒C、微妙D、分钟试题编号:xxxxxxxxxxxxxxxx2题型:单选题答案:B难度:一般试题解析:15.程序行int pinArray[8] = {17,25,26,14,13,16,15,27};数组元素pinArray[2]的值是()A、17B、25C、26D、15试题编号:xxxxxxxxxxxxxxxx5题型:单选题谜底:C难度:普通试题解析:16.Serial.println(0xA,BIN)的结果是()A、0xAB、10C、1010D、1100试题编号:xxxxxxxxxxxxxxxx5题型:单选题谜底:C难度:一般试题解析:17.步伐bitSet(8,2);执行后的值是()A、10B、12C、8D、6试题编号:xxxxxxxxxxxxxxxx7题型:单选题谜底:B难度:一般试题剖析:18.的结果是()A、1024B、512C、256D、128试题编号:xxxxxxxxxxxxxxxx7题型:单选题答案:C难度:普通试题剖析:19.14的值是()A、2B、4C、8D、16试题编号:xxxxxxxxxxxxxxxx8题型:单选题答案:D难度:一般试题解析:20.通过shiftOut函数向74HC595移位寄存器芯片DS引脚发送数据,程序如下,程序运行后,74HC595移位寄存器芯片中的数据正确的是()shiftOut(dataPin,clockPin,MSBFIRST,0xF);A、B、C、D、nbsp;nbsp;nbsp;试题编号:xxxxxxxxxxxxxxxx2题型:单选题谜底:C难度:普通试题解析:二、多选题共5题,每题2分,共10分)21.ESP32主控板集成了以下哪些功用()A、蓝牙功用B、BLE低功耗蓝牙功能C、WiFi功能D、Lora通信功能试题编号:xxxxxxxxxxxxxxxx0题型:多选题答案:A|B|C难度:一般试题解析:22.ESP32 for Arduino数字信号引脚设置有如下几种模式()A、INPUTB、OUTPUTC、INPUT_XXXD、INPUT_PULLDOWN试题编号:xxxxxxxxxxxxxxxx5题型:多项选择题谜底:A|B|D难度:一般试题剖析:23.UART串口通信中,发送的数据平日有以下几局部组成()A、肇端位B、数据位C、校验位D、截止位试题编号:xxxxxxxxxxxxxxxx7题型:多项选择题谜底:A|B|C|D难度:一般试题解析:24.8x8LED点阵屏显示的原理是()A、静态表现B、动态显示C、视觉暂留D、革新表现试题编号:xxxxxxxxxxxxxxxx4题型:多选题答案:B|C难度:普通试题解析:25.有关74HC595移位寄放器芯片描述精确的有()A、DS引脚是串行数据输入引脚B、SH_CP是数据输入时钟引脚,上升沿时数据移位C、SH_CP是数据输入时钟引脚,下升沿时数据移位D、该芯片实现串行并出功能试题编号:xxxxxxxxxxxxxxxx1题型:多项选择题谜底:A|B|D难度:普通试题解析:三、判断题共5题,每题2分,共10分)26.四位数码管的显示模式时动态显示。
2019年12月全国青少年机器人技术等级考试理论综合试卷(五级)
青少年机器人技术等级考试理论综合试卷(五级)分数:100 题数:30一、单选题(共20题,共80分)1.下列运算符中不是位操作符的是?()A. &B. |C. ^D. !试题编号:3521试题类型:单选题标准答案:D试题难度:一般试题解析:2 .将数3以二进制输出串口监视器串口,程序Serial.println(3,format);中,format应为?()A. BINB. OCTC. HEXD. DEC试题编号:3693试题类型:单选题标准答案:A试题难度:一般试题解析:3 .通过下面的程序控制LED灯的亮度,如果控制LED灯亮度最亮,合理的val应该为?()ledcSetup(0,5000,7);ledcAttachPin(8,0);ledcWrite(0,val);A. 0B. 127C. 255D. 1023试题编号:3474试题类型:单选题标准答案:B试题难度:一般试题解析:4 .程序执行后val的值是?() int val=0x47;bitSet(val,4);A. 0x00B. 0x47C. 0x57D. 0x4F试题编号:3583试题类型:单选题标准答案:C试题难度:一般试题解析:5 .按键开关模块中按键开关为上拉电阻电路,程序中需要把按键模块按下作为中断触发源,对应的中断触发模式为?()A. RISING()B. FALLING()C. ONHIGH()D. ONLOW()试题编号:3286试题类型:单选题标准答案:B试题难度:一般试题解析:6.下列移位运算符将数0b11乘以4,正确的写法是?()A. 0b11<<4B. 0b11>>4C. 0b11<<2D. Ob11>>2试题编号:3615试题类型:单选题标准答案:C试题难度:一般试题解析:7ESP32 for Arduino中,运行程序Serial.println(sizeof(int))的结果是?().A. 0B. 1C. 2D. 4试题编号:3365试题类型:单选题标准答案:D试题难度:一般试题解析:ESP32 for Arduino中,设置模拟输入信号的数值范围在0~1023之间,采用的函数是?()8.A. analogRead()B. analogWrite()C. analogSetWidth()D. ledcSetup()试题编号:3255试题类型:单选题标准答案:C试题难度:一般试题解析:9ESP32 for Arduino中,程序Serial.printf();中代表浮点数输出的格式字符为?().A. %oB. %dC. %xD. %f试题编号:3552试题类型:单选题标准答案:D试题难度:一般试题解析:10.常用的ESP32 WROOM模组集成了 ESP32芯片、( )、天线和其它精密原件。
2020年9月全国青少年机器人技术等级考试理论综合试卷(五级)
青少年机器人技术等级考试理论综合试卷(五级)2020年9月分数:100 题数:30一、单选题(共20题,共80分)1.Arduino UNO/NANO 和ESP32 WROOM模块的工作电压分别是?()A. 5V 3.3VB. 5V 5VC. 3.3 3.0VD. 5V 3.0V5100试题类型:单选题标准答案:A试题难度:一般2.ESP32 for Arduino中的 pinMode函数设置数字引脚的工作模式,下列四种模式中,Arduino UNO/Nano所不具备的是?()A. INPUTB. OUTPUTC. INPUT_PULLUPD. INPUT_PULLDOWN5163试题类型:单选题标准答案:D试题难度:一般3.下列程序通过串口分别发送数据,采用奇校验,对应的校验位数值分别为?()A. 0 0B. 1 1C. 0 1D. 1 05819试题类型:单选题标准答案:D试题难度:一般4. ESP32 for Arduino环境下,通过下列程序控制LED灯的亮度,从程序可知,LED灯连接引脚应该为?()A. 2B. 7C. 8D. 95616试题类型:单选题标准答案:C试题难度:一般5.有关ESP32主控板中的EEPROM,下列说法错误的是?()A. 系统掉电后,保存在EEPROM中的数据不会丢失B. 使用write()函数向EEPROM写入收据后,必须执行commit()函数C. 使用begin()函数设定EEPROM的大小,默认大小为2048字节D. 与Arduino UNO/Nano主控芯片不同,EEPROM是从Flash中开辟的存储区域6006试题类型:单选题标准答案:C试题难度:一般6.ESP32 for Arduino采用LEDC方式进行模拟输出时,向指定引脚输出模拟信号的函数是()A. analogWrite()B. ledcAttachPin()C. dacWrite()D. ledcWrite()5241试题类型:单选题标准答案:D试题难度:一般7.下列程序执行后,串口监视器显示的相应内容为?()A. 12B. 23C. 1D. 25975试题类型:单选题标准答案:C试题难度:一般8.ESP32 for Arduino模拟输入函数analogRead()返回的最大值是?()A. 0B. 255C. 1023D. 40955194试题类型:单选题标准答案:D试题难度:一般9.执行程序Serial.write(65),串口监视器显示的内容为?()A. 65B. "65"C. AD. a5928试题类型:单选题标准答案:C试题难度:一般10.执行程序Serial.println(18,format)后,串口监视器显示的值为12,format应为?()A. BINB. OCTC. HEXD. DEC5772试题类型:单选题标准答案:C试题难度:一般试题解析:11.程序执行后val的值是?()A. 0x33B. 0x11C. 0x9ED. 0x1C5569试题类型:单选题标准答案:B试题难度:一般12.程序 Serial.println(5 % (-2))运行结果是?()A. 1B. 2.5C. -2.5D. -15381试题类型:单选题标准答案:A试题难度:一般13.UART通信的停止位是?()A. 高电平B. 低电平C. 上升沿D. 下降沿5725试题类型:单选题标准答案:A试题难度:一般14. ESP32 for Arduino程序如下,变量potVal的返回值的范围是0~511,请问程序中x的值为()A. 8B. 9C. 10D. 125288试题类型:单选题标准答案:B试题难度:一般15.74HC595移位寄存器芯片的下列引脚中,用于控制数据输入速度的引脚是?()A. SH_CPB. ST_CPC. DsD. Q05459试题类型:单选题标准答案:A试题难度:一般16.通过shiftOut(dataPin,clockPin,bitOrder,value)函数向74HC595移位寄存器芯片写入数据,下列说法错误的有?()A. dataPin引脚和74HC595的Ds引脚相连B. clockPin引脚和74HC595的ST_CP引脚相连C. bitOrder表示输出位的顺序,只有两种顺序,分别为MSBFIRST和LSBFIRSTD. value是要移位输出的数据5678试题类型:单选题标准答案:B试题难度:一般17.通过串口发送数据,串口初始设置程序为Serial.begin(9600),每秒钟最多发送的字节数比较合理的是?()A. 960B. 1024C. 1200D. 96005897试题类型:单选题标准答案:A试题难度:一般18.ESP32 for Arduino中,程序Serial.printf()中表示整数输出的格式字符为?()A. %oB. %dC. %xD. %f5522试题类型:单选题标准答案:B试题难度:一般试题解析:19. ESP32 for Arduino环境下,下列程序的运行结果是?()A. 1 8B. 4 8C. 1 32D. 4 325428试题类型:单选题标准答案:D试题难度:一般20.共阳数码管和74HC595芯片连接如下图所示,执行下列程序后,数码管显示的图形如图中红色所示,shiftOut程序行[ ]内的数值为?()A. 0b10001010B. 0b1010001C. 0b1110101D. 0b101011105334试题类型:单选题标准答案:C试题难度:一般二、多选题(共5题,共10分)21.关于millis()函数,下列说法正确的有?()A. millis()函数返回值的单位是毫秒B. millis()函数返回自系统通电后至当前的时间C. 使用变量保存millis()函数的返回值,要预防变量发生溢出D. millis()函数返回值的单位是微秒6194试题类型:多选题标准答案:A|C试题难度:一般试题解析:22.ESP32 for Arduino中与电容触摸传感器相关的函数有?()A. touchRead()B. touchAttachInterrupt()C. touchDatachPin()D. touchWrite()6147试题类型:多选题标准答案:A|B试题难度:一般23.ESP32 for Arduino的中断触发模式有?()A. HIGHB. CHANGEC. RISINGD. FALLING6084试题类型:多选题标准答案:B|C|D试题难度:一般24.ESP32 for Arduino,下列具有模拟输出功能的有?()A. LEDCB. SigmaDeltaC. DACD. ADC6053试题类型:多选题标准答案:A|B|C试题难度:一般25.ESP32 WROOM模组集成的如下功能模块中,哪些功能模块是Arduno UNO/Nano所用的Atemga328P芯片所不具备的?()A. WiFiB. 蓝牙C. ADCD. DAC6116试题类型:多选题标准答案:A|B|D试题难度:一般三、判断题(共5题,共10分)26.ESP32 for Arduino中所有的引脚都可以作为模拟输入引脚使用。
2021.09全国青少年机器人技术等级考试理论综合试卷(五级)
2021.09青少年机器人技术等级考试理论综合试卷(五级)分数:100.00 题数:30一、单选题(共20题,共80分)1. 74HC595移位寄存器芯片的SH_CP引脚,其作用说法正确的是?()BA、串行数据输入引脚B、控制串行数据输入的速度C、用于级联时,在芯片间传送数据D、锁存时钟引脚2. 运行下列程序,串口监视器显示的结果是?()AA、HelloB、HelloWC、World!D、orld!3. ESP32主控板采用LEDC进行模拟输出时,最多可实现模拟输出的通道数是?()CA、2B、8C、16D、344. 共阴数码管和74HC595芯片连接如下图所示,执行下列程序后,数码管显示的图形如图中红色所示,shiftout程序行[ ]内的数值为?()CA、0x09B、0x90C、0xF6D、0x6F5. ESP32 for Arduino中,程序Serial.printf()中表示换行的转义字符是?() AA、\nB、\tC、\rD、\\6. 正常情况下,ESP32主控板引脚输出高电平时,引脚的电压为?() BA、2.3VB、3.3VC、3.5VD、5V7. 下列程序的运行后,串口监视器显示的结果是?()CA、0B、2C、4D、58. 表达式0x5B|0xB5的结果是?() BA、0x11B、0xFFC、0x5BD、0xB59. ESP32 for Arduino,电路如图所示,当按键保持按下状态时触发中断,对应的中断触发模式是?() AA、ONLOWB、ONHIGHC、RISINGD、FALLING10. 表达式0xFF&0xAA的结果是?() BA、0xFFB、0xAAC、0xFAD、0xAF11. 两个器件通过UART进行数据传送时,一个器件的TX引脚连接到另一个器件的?()AA、RXB、TXC、GNDD、Vcc12. ESP32程序中模拟输入取样分辨率设置语句为analogSetWidth(10),函数analogRead()返回的最小值是?() AA、0B、255C、1023D、409513. ESP32 for Arduino,电路如图所示,运行下列程序后,当按键按下时,下列说法正确的是?()AA、按键按下时LED灯点亮B、按键按下时LED灯熄灭C、按键按下时LED灯闪烁D、按键按下时LED灯亮灭状态不确定14. 下列程序输出的结果是?() CA、B、C、D、其余选项都不对15. ESP32 for Arduino采用LEDC方式进行模拟输出时,函数ledcDetachPin()的作用是?( C)A、设置LEDC的通道参数B、将指定通道上的PWM信号输出到GPIO引脚C、终止指定引脚的PWM信号输出D、向指定通道输出PWM信号16. ESP32 for Arduino,触摸传感器函数touchRead()返回值的范围是?() AA、0~255B、0~1023C、0~4095D、可通过参数设置范围值17. ESP32主控板,设置数字引脚为内部上拉输入模式时,对应的参数是?() CA、INPUTB、OUTPUTC、INPUT_PULLUPD、INPUT_PULLDOWN18. 运行下列程序,串口监视器显示的结果是?()DA、48 9 48B、48 9 0C、48 0D、0 019. UART发送数据的先后顺序,下列说法正确的是?() BA、起始位、校验位、数据位、停止位B、起始位、数据位、校验位、停止位C、起始位、数据位、停止位、校验位D、起始位、停止位、数据位、校验位20. ESP32 for Arduino,下列中断触发模式中,属于高电平触发的是?()BA、ONLOWB、ONHIGHC、RISINGD、HIGH二、多选题(共5题,共10分)21. 有关millis()函数下列说法正确的是?() ACA、millis()函数返回当前程序自开始运行至当前的时间B、millis()函数返回的时间单位为微秒C、系统长时间运行时,要预防保存millis()函数返回值的变量可能会发生数据溢出D、在程序运行时,可将millis()函数的返回值归0,以防止数据溢出22. 下列选项中程序中,用于在程序中表示变量a除以4的表达式有?()ABA、a/4B、a>>2C、aD、a>>423. ESP32 for Arduino ,读取按键开关的返回值,当不采用外部电阻上拉或下拉时,程序中[ ]的值可以为?()CDA、INPUTB、OUTPUTC、INPUT_PULLUPD、INPUT_PULLDOWN24. 关于ESP32 WROOM模块外设中,Arduino UNO/Nano主控板所不具备的是?()ABDA、霍尔传感器B、蓝牙C、ADCD、DAC25. 下列函数中,用于将数据指定位设置为1的函数有?()BCA、bitClear()B、bitSet()C、bitWrite()D、bitRead()三、判断题(共5题,共10分)26. 74HC595移位寄存器芯片,SH_CP引脚是低电平是传送数据到移位寄存器。
2021.03全国青少年机器人技术等级考试理论综合试卷(五级)

2021.03青少年机器人技术等级考试理论综合试卷(五级)分数:100.00 题数:30一、单选题(共20题,共80分)1. ESP32 for Arduino程序中,模拟输入取样分辨率设置语句为analogSetWidth(10),函数analogRead()返回的最大值是? CA、255B、511C、1023D、40952. ESP32 for Arduino中,程序Serial.printf()中表示十进制整数和浮点数输出的格式字符是? BA、%o %dB、%d %fC、%x %fD、%f %d3. 下列外设中,ESP32 WROOM模块和Arduino UNO/Nano主控板均具有的是?DA、霍尔传感器B、蓝牙C、ADCD、DAC4. 下列函数中,用于判断串口接收缓冲区是否有数据的函数是?CA、begin()B、readBytes()C、available()D、read()5. 程序中数组定义为int array[][2] = {1,2,3,4,5,6};下列确定数组第一维长度的表达式,正确的是?DA、sizeof(array)B、sizeof(array[])C、sizeof(array)/sizeof(array[0][0])D、sizeof(array)/sizeof(array[0])6. ESP32 for Arduino,电路如图所示,当按键按下时触发中断,对应的中断触发模式是?CA、ONLOWB、ONHIGHC、RISINGD、FALLING7. ESP32 for Arduino,电路如图所示,运行下列程序后,当按键按下时,下列说法正确的是?() AA、LED灯点亮B、LED灯熄灭C、LED灯闪烁D、LED灯亮灭状态不确定8. UART通信,起始位和停止位的电平分别是?BA、高电平和低电平B、低电平和高电平C、均为低电平D、均为高电平9. millis()函数所返回时间段的计时起点是?CA、自控制板通电时开始B、自程序编写时开始C、自当前程序开始运行时开始D、自控制板重启时开始10. 74HC595移位寄存器芯片的下列引脚中,用于串行数据输入的引脚是?CA、SH_CPB、ST_CPC、DsD、Q011. ESP32主控板,设置数字引脚为输出模式时,对应的参数是? BA、INPUTB、OUTPUTC、INPUT_PULLUPD、INPUT_PULLDOWN12. ESP32 for Arduino程序中,采用LEDC方式进行模拟输出时,函数ledcSetup(channel,freq,bit_num)的参数中,freq的含义是? BA、通道编号B、PWM的频率C、分辨率D、PWM值13. 一般情况下,Arduino UNO/NANO主控板和ESP32 WROOM模块的工作电压分别是? CA、3.5V,3.3VB、5V,5VC、5V,3.3VD、5V,3.0V14. 表达式0x3F&0xF3的结果是? AA、0x33B、0xFFC、0x3FD、0xF315. ESP32 for Arduino,下列中断触发模式中,属于上升沿触发的是? CA、HIGHB、ONHIGHC、RISINGD、FALLING16. 共阳数码管和74HC595芯片连接如下图所示,执行下列程序后,数码管显示的图形如图中红色所示,第6行shiftout程序行[ ]内的数值为? BA、0xF2B、0xDC、0xB0D、0x4F17. 两个器件通过UART进行数据传送时,一个器件的RX引脚连接到另一个器件的? BA、RXB、TXC、GNDD、Vcc18. 下列程序的运行后,串口监视器显示的结果是?CA、1B、2C、6D、1219. 定义从字符串对象String a = "123+456";从a中获取整数456,下列表达式正确的是?AA、a.substring(4).toInt()B、a.substring(5).toInt()C、a.substring(4)D、a.substring(5)20. ESP32 for Arduino,touchRead()函数的功能是? CA、检测当前的磁场强度B、返回指定电容传感器引脚的中断阈值C、返回指定引脚电容传感器的值D、设置指定电容传感器引脚的中断阈值二、多选题(共5题,共10分)21. 下列可以向串口发送数据的函数有? ACDA、Serial.print()B、Serial.read()C、Serial.write()D、Serial.println()22. 下列选项中程序中,用于在程序中表示变量a乘以4的表达式有? ACA、a*4B、a>>2C、aD、a>>423. ESP32主控板中,下列具有模拟输出功能的有? ABCA、LEDCB、SigmaDeltaC、DACD、ADC24. 下列函数中,用于将数据指定位设置为0(复位)的函数有? ACA、bitClear()B、bitSet()C、bitWrite()D、bitRead()25. ESP32所集成的蓝牙外设,包含? ABA、经典蓝牙B、低功耗蓝牙C、WiFiD、UART三、判断题(共5题,共10分)26. ESP32 WROOM模组的MCU是单核处理器。
2021年12月青少年机器人技术等级考试理论试卷五级

2021年12月青少年机器人技术等级考试理论试卷(五级)第一部分:单选题(每题2分,共40分)1. 机器人的基本组成部分是()。
A. 控制系统B. 驱动部分C. 传感器D. 执行部分2. 机器人的“安全第一”是指()。
A. 机器人安全B. 工作对象安全C. 操作者安全D. 环境安全3. 机器人离线编程是指()。
A. 在机器人正式运行前进行程序的编写和调试工作B. 在运行时通过手动控制机器人进行编程C. 在机器人运行时进行编程D. 在机器人运行过程中进行程序的修改和完善4. 机器人控制系统通常由()组成。
A. 机器人控制器、机器人处理器、机器人传感器B. 机器人控制器、机器人执行器、机器人传感器C. 机器人控制器、机器人处理器、机器人执行器D. 机器人控制器、机器人处理器、机器人执行器、机器人传感器5. 控制机器人动作的程序是由()编写的。
A. 机器人制造商B. 用户C. 机器人服务提供商D. 国家标准制定机构6. 机器人执行器的种类不包括()。
A. 手臂B. 关节C. 电机D. 轮子7. 在机器人系统的传感器中,距离传感器可以测量的物体有()。
A. 金属物体B. 木材C. 塑料D. 所有物体8. 工业机器人在现代制造业中广泛应用,而农业、医疗等领域的机器人应用也不断拓展,下列不是机器人应用领域的是()。
A. 金融B. 娱乐C. 环境保护D. 发电9. 工业机器人的应用场景不包括()。
A. 汽车工厂车身涂装B. 电子厂自动化生产线C. 医院病房护理D. 空间探测10. 机器人按照机械运动方式分,可分为()。
A. 直线运动和旋转运动B. 摆动运动和旋转运动C. 直线运动和摆动运动D. 定点运动和旋转运动11.A. 并行修改和调整程序B. 减少生产停机时间C. 机器人的工作不受影响D. 根据实际情况进行现场调整12. 各个微处理器之间的通信使用()。
A. 并排连接方式B. 每个微处理器占据单独的总线C. 分布式总线系统D. 串行通信方式13. 计算机控制的机器人可分为()。
2022年3月青少年机器人技术等级考试实际操作试卷(五级)含答案
2022年3月青少年机器人技术等级考试实际操作试卷(五级)
含答案
分数:100 题数:2
一、电路搭设(共1题,每题20分,共20分)
1. 电路搭设
原器件:
(1) 装置中包含74HC595移位寄存器模块(或元器件);(4分)
(2) 装置中包含四位数码管;(2分)
(3) 装置中包含按键模块;(2分)
电路搭设:
(4) 四位数码管与74HC595连接正确连接;(4分)
(5) 74HC595与主控板正确连接;(4分)
(6) 按键模块与主控板正确连接。
(4分)
试题编号:202202241636-5-cps-1
试题类型:简答题
标准答案:
试题难度:一般
试题解析:
二、功能实现(共1题,每题80分,共80分)
2. 功能呈现
(1)程序启动后,四位数码管显示今天的日期数字“0326”;(15分)
(2)第1次按下并释放按键,四位数码管清空当前数据,并显示0;(15分)
(3)第2次按下并释放按键,四位数码管显示1;(10分)
(4)第3次按下并释放按键,四位数码管显示2;(10分)
(5)测评老师要求考生连续按键,当考生第11次按下并释放按键,四位数码管显示10;(10分)
(6)当考生按下按键时,测评老师要求考生按键保持按下一段时间,在此期间,四位数码管显示的数字没有出现乱码或黑屏。
(20分)
试题编号:202202241636-5-cps-22
试题类型:简答题
标准答案:
试题难度:一般
试题解析:
:
1。
全国青少年机器人技术等级(四级)考试理论(5)
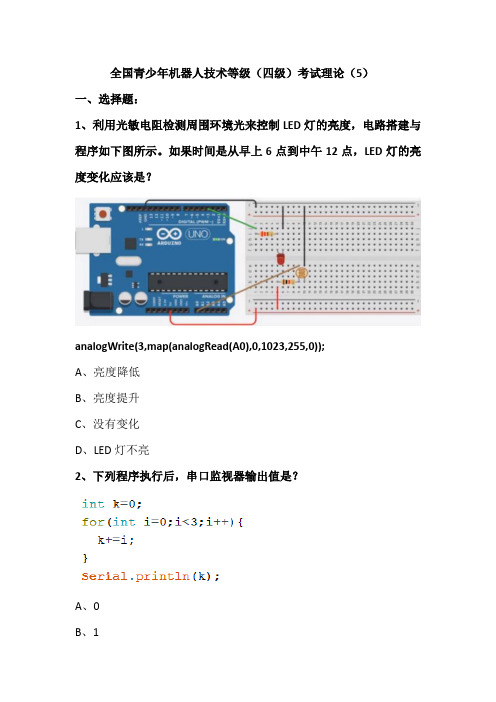
全国青少年机器人技术等级(四级)考试理论(5)一、选择题:1、利用光敏电阻检测周围环境光来控制LED灯的亮度,电路搭建与程序如下图所示。
如果时间是从早上6点到中午12点,LED灯的亮度变化应该是?analogWrite(3,map(analogRead(A0),0,1023,255,0));A、亮度降低B、亮度提升C、没有变化D、LED灯不亮2、下列程序执行后,串口监视器输出值是?A、0B、1C、2D、33、有关三极管的说法,正确的是?A、三极管分为PNP型和NPN型B、三极管是一种超导体元器件C、三极管不区分极性D、三极管三个引脚分别是基极,集电极,漏电极4、使用超声波传感器探测前方障碍物,电路搭建与程序如下图所示,请问A、B、C分别为?A、10、9、29.0B、9、10、58.0C、9、10、29.0D、10、9、58.05、在编写舵机程序时,需要调用头文件,以下调用头文件程序正确的是?A、#include’Servo.h’B、#include Servo.hC、#include<Servo.h>D、#include #Servo.h6、下列选项中,不能用于标识数据类型的是?A、intB、floatC、booleanD、const7、以下选项中,对Arduino表述正确的是?A、Arduino仅仅指硬件的控制板B、Arduino来源于美国C、Arduino是开源平台D、Arduino只支持使用C语言编程8、Arduino UNO/Nano控制板,板载LED灯连接的管脚是?A、13B、12C、1D、09、关于下拉电阻说法错误的是?A、下拉电阻需要与GND相连B、下拉电阻需要与VCC相连C、下拉电阻是将用电器所接管脚固定在低电平D、下拉电阻是从器件输出电流10、下列不属于算数运算符的是?A、-B、+C、!D、/11、执行下列程序后,串口监视器输出的内容是?A、***B、*C、***D、**** ** ** ***** *** * ***12、Arduino C编程,16进制数的标识符是?A、0xB、0bC、BD、X13、Arduino UNO/Nano控制板,执行下列程序后,测量3号管脚的电压可能为?A、12VB、5VC、2.5VD、0V14、将电位器连接在A0管脚,LED灯接在3号管脚,旋动电位器,随着电位器的模拟值不断增大,LED灯出现从最亮到熄灭的过程,请问下列程序最有可能为?A、B、C、D、15、下列用于机器人感知外部信息的是?A、执行器B、传感器C、控制器D、结构体16、使用Arduino控制板制作一个监控天气温度的项目,可以把记录的数据储存在控制板的?A、SRAMB、FlashC、CPUD、EEPROM17、执行下列程序后,串口监视器输出的值可能是?A、1B、1.40C、0.4D、018、Arduino UNO/Nano控制板使用的编程语言是?A、PythonB、CC、JavaD、PHP19、下列选项中,不属于自律型机器人要素的是?A、感知B、智能C、动作与结构D、色彩20、Arduino控制板的处理器被称为?A、CPUB、MCUC、SRAMD、USB二、多选题:21、下列关于LED表述错误的是?A、它有三个脚针,分为PNP型和NPN型B、不区分极性C、它属于导体元器件D、它只可以单向导通22、Arduino控制板的MCU(微控制器)集成了下列哪些功能?A、CPUB、FlashC、SDRAMD、I/O23、下列变量声名语句中,正确的是?A、char c;B、float f4;C、bool BD、int if24、下列传感器返回模拟量的是?A、按键模块B、温度模块C、电位器模块D、光敏电阻模块25、下列选项中,关于Arduino控制板描述不正确的是?A、Arduino控制板仅支持C语言编程B、Arduino控制板不属于开源硬件设备C、Arduino控制板没有任何储存单元D、断电后,Arduino控制板内存中的数据会丢失三、判断题:26、Arduino UNO/Nano控制板不能输出3.3V电压。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题型:单选题
答案:C
难度:一般
试题解析:
二、多选题(共5题,每题2分,共10分)
21. 下列四个函数中,哪些函数实现置位功能?
A、bitSet()
B、bitWrite()
C、bitClear()
D、bitRead()
试题编号:20200604155216206
题型:单选题
答案:C
难度:一般
试题解析:
2. 当中断触发模式设置为CHANGE时,在按键开关按下并释放的过程中,如不考虑抖动,会触发几次中断?
A、0
B、1
C、2
D、不确定
试题编号:20200604155216126
题型:单选题
答案:C
难度:
试题解析:
3. UART通信的起始位是?
A、高电平
B、低电平
C、上升沿
D、下降沿
试题编号:20200604155215970
题型:单选题
答案:B
难度:
试题解析:
4. 下列函数中,用于返回串口接受缓冲区中字节数量的函数是?
A、begin()
B、find()
C、available()
D、length()
试题编号:20200604155216032
题型:单选题
答案:C
题型:单选题
答案:B
难度:一般
试题解析:
8. 下列函数中,用于从字符串中截取部分字符的函数是?
A、indexOf()
B、length()
C、substring()
D、findUntil()
试题编号:20200604155216048
题型:单选题
答案:C
难度:
试题解析:
9.
下列程序执行后,串口监视器显示的值为?
题型:多选题
答案:A|B
难度:
试题解析:
22. 下列模块显示输出时,必须采用动态输出的有?
A、一位数码管
B、四位数码管
C、8x8点阵屏
D、Led灯
试题编号:20200604155216222
题型:多选题
答案:B|C
难度:
试题解析:
23. UART通信中,用于数据接收和发送的引脚有哪些?
A、TX
题型:单选题
答案:D
难度:
试题解析:
6. UART通信中,传送的数据中可以没有?
A、起始位
B、数据位
C、校验位
D、结束位
试题编号:20200604155215985
题型:单选题
答案:C
难度:
试题解析:
7.
下列程序的运行结果是?
A、3 6
B、5 6
C、3 5
D、5 5
试题编号:20200604155215876
试题编号:20200604155216063
题型:单选题
答案:B
难度:
试题解析:
19.
共阳数码管和74HC595芯片连接如下图所示,执行下列程序后,数码管显示的图形如图中红色所示,shiftout程序行[ ]内的数值为?
A、0b10001010
B、0b1010001
C、0b01110101
青少年机器人技术等级考试理论综合试卷(五级)
分数:100.00 题数:30
一、单选题(共20题,每题4分,共80分)
1.
ESP32程序中模拟输入对应如下语句,变量potVal的返回值的范围是?
A、0~1
B、0~511
C、0~1023
D、0~4095
试题编号:20200604155215782
难度:
试题解析:
5. 有关millis()函数说法错误的是?
A、millis()函数返回自系统上电启动到当前的时间
B、millis()函数返回的时间单位为毫秒
C、系统长时间运行,用于保存millis()函数返回值的变量可能会发生溢出
D、在程序运行时,可将millis()函数的返回值归0
试题编号:20200604155215938
A、A A
B、65 A
C、A 65
D、65 65
试题编号:20200604155216017
题型:单选题
答案:A
难度:一般
试题解析:
10. ESP32采用LEDC方式进行模拟输出时,通道参数设置的函数是?
A、ledcSetup()
B、ledcAttachPin()
C、analogWrite()
D、ledcWrite()
试题编号:20200604155215797
题型:单选题
答案:A
难度:
试题解析:
11. 8
A、0b1000000
B、0b100000
C、0b10000
D、0b100
试题编号:20200604155216079
题型:单选题
答案:B
难度:
试题解析:
12.
ESP32主控板运行下列程序后,串口监视器显示的值为?
D、Ds’
试题编号:20200604155215907
题型:单选题
答案:D
难度:
试题解析:
18. 下列关于程序EEPROM.write(2,3)描述正确的是?
A、向EEPROM中地址3写入数字2
B、向EEPROM中地址2写入数字3
C、自EEPROM地址3起写入2个字节信息
D、自EEPROM地址2起写入3个字节信息
D、0b10101110
试题编号:20200604155215892
题型:单选题
答案:D
难度:一般
试题解析:
20. 关于8x8点阵,下列说法错误的是?
A、8x8点阵显示一般采用动态显示
B、8x8点阵一共有16个引脚分别控制行和列
C、可以同时点亮对角线的两颗LED灯
D、可以同时控制同一行中不同LED的亮灭
A、3
B、6
C、12
D、24
试题编号:20200604155216110
题型:单选题
答案:D
难度:一般
试题解析:
13. ESP32中断触发模式有几种?
A、2
B、3
C、4
D、5
试题编号:20200604155215813
题型:单选题
答案:D
难度:
试题解析:
14.
ESP3主控板,实现按键控制LED灯,电路原理图如图所示,程序pinMode(16,mode);中,mode应为?
A、INPUT
B、OUTPUT
C、INPUT_PULLUP
D、INPUT_PULLDOWN
试题编号:20200604155215860
题型:单选题
答案:D
难度:一般
试题解析:
15. ESP32主控芯片,和模拟输入相对应的模块是?
A、LEDC
B、SigmaDelta
C、DAC
D、ADC
试题编号:20200604155215748
题型:单选题
答案:C
难度:
试题解析:
16. ESP32数据总线的宽度是?
A、8位
B、16位
C、32位
D、64位
试题编号:20200604155215829
题型:单选题
答案பைடு நூலகம்C
难度:
试题解析:
17. 74HC595移位寄存器模块级联时,用于级联模块间数据传输的引脚是?
A、SH_CP
B、SH_CP
C、Ds