牛顿法求解非线性方程组的解C程序
牛顿迭代法解非线性方程(组)

牛顿迭代法解非线性方程(组)在辨识工作中,常常需要对辨识准则或者判据进行求极值,这往往涉及到求非线性方程(组)的解问题。
牛顿迭代法是一种常用方法。
下面把自己对牛顿迭代法的学习和理解做个总结。
1.一元非线性方程的牛顿迭代公式和原理以一元非线性方程 f(x)=0 为例,对函数 f(x)进行Taylor级数展开(只展开至线性项)得f(x) = f(x0)+f'(x0)(x-x0)所以方程可写成f(x0)+f'(x0)(x-x0) = 0其中x0是给定的已知值,则不难推导出方程的解(当然,只是近似解,毕竟Taylor展开过程中只取了线性项)x = x0 - f(x0) / f'(x0)其中x不是真实解,但是相比之前的x0更靠近真实解了,因此可以多重复几次上述过程,从而使得到的解非常接近准确值。
所以,对于一元非线性方程,牛顿拉夫逊迭代公式为:x(k+1) = x(k) - f(x(k)) / f'(x(k))根据Taylor级数的几何意义我们可以从几何上形象的看牛顿迭代法的求解f(x)=0的过程。
第一次迭代x1 = x0 - f(x0) / f'(x0),其中f(x0) / f'(x0)的几何意义很明显,就是x0到x1的线段长度(这可以从直角三角形的知识得到)。
第二次迭代x2 = x1 - f(x1) / f'(x1),其中f(x1) / f'(x1)的几何意义很明显,就是x1到x2的线段长度。
同理可以进行第三次迭代第四次迭代,可以明显的看出x的取值在不断逼近真实解x*。
可能有人问,迭代求得的结果会不会不收敛,也就是x会不会偏离x*。
由于x0是在x*附近区域取值的,因此x0到x1这段曲线应该认为是平滑的没有转折的,因此切线与x轴的交点只会越来越接近真实解x*。
但是如果x0的取值离x*比较远的话,那么x0到x1这段曲线上可能有“转折”,这样就可能引起迭代的不收敛。
解非线性方程的牛顿迭代法及其应用
解非线性方程的牛顿迭代法及其应用一、本文概述非线性方程是数学领域中的一个重要研究对象,其在实际应用中广泛存在,如物理学、工程学、经济学等领域。
求解非线性方程是一个具有挑战性的问题,因为这类方程往往没有简单的解析解,需要通过数值方法进行求解。
牛顿迭代法作为一种古老而有效的数值求解方法,对于求解非线性方程具有重要的应用价值。
本文旨在介绍牛顿迭代法的基本原理、实现步骤以及在实际问题中的应用。
我们将详细阐述牛顿迭代法的基本思想,包括其历史背景、数学原理以及收敛性分析。
我们将通过具体实例,展示牛顿迭代法的计算步骤和实际操作过程,以便读者能够更好地理解和掌握该方法。
我们将探讨牛顿迭代法在各个领域中的实际应用,包括其在物理学、工程学、经济学等领域中的典型应用案例,以及在实际应用中可能遇到的问题和解决方法。
通过本文的介绍,读者可以深入了解牛顿迭代法的基本原理和应用技巧,掌握其在求解非线性方程中的实际应用方法,为进一步的研究和应用提供有力支持。
二、牛顿迭代法的基本原理牛顿迭代法,又称为牛顿-拉夫森方法,是一种在实数或复数域上近似求解方程的方法。
其基本原理是利用泰勒级数的前几项来寻找方程的根。
如果函数f(x)在x0点的导数f'(x0)不为零,那么函数f(x)在x0点附近可以用一阶泰勒级数来近似表示,即:这就是牛顿迭代法的基本迭代公式。
给定一个初始值x0,我们可以通过不断迭代这个公式来逼近f(x)的根。
每次迭代,我们都用当前的近似值x0来更新x0,即:这个过程一直持续到满足某个停止条件,例如迭代次数达到预设的上限,或者连续两次迭代的结果之间的差小于某个预设的阈值。
牛顿迭代法的收敛速度通常比线性搜索方法快,因为它利用了函数的导数信息。
然而,这种方法也有其局限性。
它要求函数在其迭代点处可导,且导数不为零。
牛顿迭代法可能不收敛,如果初始点选择不当,或者函数有多个根,或者根是重根。
因此,在使用牛顿迭代法时,需要谨慎选择初始点,并对迭代过程进行适当的监控和调整。
牛顿迭代法求解非线性方程组的解
10 简化牛顿法 简化牛顿法又称平行弦法,其迭代公式为
xk1 xk Cf (xk ),C 0, k 0,1,
(4-7)
从不动点迭代法的角度看,简化牛顿法的迭代函数(x) x Cf (x) ,下面讨论简
化牛顿法的收敛性。
若| '(x) ||1 Cf '(x) | 1 ,即取 0 Cf ' (x) 2 .在根 x* 附近成立,则迭代法
x k 的点 Pk 引切线,并将该切线与 x 轴的交点的横坐标 x k1 作为 x* 的新的近似值。 注意到切线方程为
y f (xk ) f '(xk )(x xk )
(4-4)
这样求得的值 x k1 比满足 f (xk ) f '(xk )(x xk ) 0 ,从而就是牛顿公式
x
k 1
| f (xk1) || f (xk ) |
(4-8)
满足此要求的算法称为下山法。
将牛顿法和下山法一起使用时,即在下山法保证函数值稳定下降的前提下,
用牛顿法加快收敛速度。为此,为此将牛顿法的计算结果
xk 1
xk
f (xk ) f ' (xk )
(4-9)
与前一步的近似值 xk 的适当加权平均作为新的改进值
代法中所遇到的 jacobi 矩阵难求的问题。
关键词:非线性方程组、牛顿迭代法、MATLAB、 jacobi 矩阵
一、前言 非线性方程组在实际问题中经常出现,并且在科学与工程计算中的地位越来
越来重要,很多常见的线性模型都是在一定条件下由非线性问题简化得到的,为 得到更符合实际的解答,往往需要直接研究非线性模型,然而从线性到非线性是 一个质的飞跃,方程的性质的不同,所以求解方法也有很大差别。本文主要介绍 关于非线性方程及方程组的数值解法,先分析非线性方程的数值解法,然后再延 伸到方程组的解法。
c++ 牛顿迭代法解方程组
c++ 牛顿迭代法解方程组牛顿迭代法(Newton's Method)是一种用于解方程的迭代算法,可以用于解非线性方程组。
下面是使用 C++ 实现牛顿迭代法解方程组的示例:#include <iostream>#include <cmath>// 定义方程组中的函数double f1(double x, double y) {return x * x + y * y - 1;}double f2(double x, double y) {return x - y * y;}// 定义方程组中的偏导数double df1_dx(double x, double y) {return 2 * x;}double df1_dy(double x, double y) {return 2 * y;}double df2_dx(double x, double y) {return 1;}double df2_dy(double x, double y) {return -2 * y;}// 牛顿迭代法解方程组void newtonIteration(double x0, double y0, int maxIterations) { double epsilon = 1e-6; // 迭代精度double x = x0;double y = y0;for (int i = 0; i < maxIterations; i++) {double det = df1_dx(x, y) * df2_dy(x, y) - df1_dy(x, y) * df2_dx(x, y);double dx = (-f1(x, y) * df2_dy(x, y) + f2(x, y) * df1_dy(x, y)) / det;double dy = (f1(x, y) * df2_dx(x, y) - f2(x, y) * df1_dx(x, y)) / det;x += dx;y += dy;if (std::abs(dx) < epsilon && std::abs(dy) < epsilon) { std::cout << "Converged to solution: x = " << x << ", y = " << y << std::endl;return;}}std::cout << "Iteration did not converge to a solution" << std::endl;}int main() {double initialX = 0.5;double initialY = 0.5;int maxIterations = 100;newtonIteration(initialX, initialY, maxIterations);return 0;}在上述示例中,我们定义了一个方程组,包含两个方程 f1(x, y) = x^2 + y^2 - 1和f2(x, y) = x - y^2。
牛顿迭代法求解方程组

牛顿迭代法求解方程组一、牛顿迭代法的原理牛顿迭代法是一种求解非线性方程组的数值方法,其原理基于泰勒级数展开和迭代逼近。
对于一个方程组F(x)=0,我们可以通过不断迭代来逼近方程组的解。
具体的迭代公式如下:x_(n+1) = x_n - J^(-1)(x_n) * F(x_n)其中,x_n表示第n次迭代得到的近似解,J表示F(x)的雅可比矩阵。
二、牛顿迭代法的步骤1. 选择初始值x0,并计算F(x0)和J(x0)。
2. 利用迭代公式计算下一次迭代的近似解x1。
3. 判断迭代误差是否满足要求,如果满足则停止迭代;否则继续迭代。
4. 重复步骤2和步骤3,直到满足迭代停止条件。
三、牛顿迭代法的应用牛顿迭代法在实际问题中有广泛的应用,如求解非线性方程、优化问题等。
下面以两个具体的例子来说明牛顿迭代法的应用。
例1:求解方程组考虑方程组:f1(x1, x2) = x1^2 + x2^2 - 1 = 0f2(x1, x2) = x1 - x2^2 = 0我们可以通过牛顿迭代法来求解该方程组。
首先计算雅可比矩阵:J(x) = [2x1, 2x2; 1, -2x2]选择初始值x0=(1, 1),然后进行迭代计算:x1 = x0 - J^(-1)(x0) * F(x0)迭代计算的结果为x1=(0.7071, 0.7071),继续迭代直到满足停止条件。
例2:求解最小二乘问题最小二乘问题是求解一个线性方程组Ax=b的最优解。
如果方程组没有精确解,则可以使用牛顿迭代法来逼近最优解。
具体步骤如下:1. 初始值选择为x0=0。
2. 计算残差r=b-Ax0。
3. 计算雅可比矩阵J=A。
4. 利用迭代公式计算下一次迭代的近似解x1=x0 - J^(-1)(x0) * r。
5. 判断迭代误差是否满足要求,如果满足则停止迭代;否则继续迭代。
6. 重复步骤4和步骤5,直到满足迭代停止条件。
牛顿迭代法作为一种求解非线性方程组的有效方法,具有收敛速度快、精度高等优点。
解非线性方程组的牛顿迭代法

为克服这两个缺点,通常可用下述方法.
(1) 简化牛顿法,也称平行弦法.
xk 1 xk Cf ( xk )
其迭代公式为 (4.7)
C 0,1 ,.
迭代函数 ( x) x Cf ( x).
若在根 x * 附近成立 ( x) 1 Cf ( x) 1 ,即取 0 Cf ( x) 2,则迭代法(4.7)局部收敛.
8
xk
C 2 C
q2
k
1 q
2k
.
对任意 x0 0,总有 q 1,故由上式推知,当 k 时 xk C ,即迭代过程恒收敛. 例8 解 求 115 .
表7 6 计算结果 k 0 1 2 3 4 xk 10 10.750000 10.723837 10.723805 10.723805
f ( x) , f ( x)
由于
( x)
f ( x) f ( x) . 2 [ f ( x)]
假定 x *是 f ( x) 的一个单根,即 f ( x*) 0, f ( x*) 0 , 则由上式知 ( x*) 0 ,于是依据定理4可以断定,牛顿法 在根 x *的邻近是平方收敛的.
准备 迭代
x0 ,计算 f 0 f ( x0 ), 选定初始近似值
步骤2
按公式
x1 x0 f 0 / f 0
迭代一次,得新的近似值 x1,计算 f1 f ( x1 ), f1 f ( x1 ). 步骤3 控制
x1 满足 1 如果
f1 2 ,则终 或
5
止迭代,以 x1作为所求的根;否则转步骤4. 允许误差,而
3
又因
( x*)
f ( x*) , f ( x*)
(精品word)不动点迭代法和牛顿法非线性方程组求解
《MATLAB 程序设计实践》课程考核1、编程实现以下科学计算算法,并举一例应用之.(参考书籍《精通MALAB科学计算》,王正林等著,电子工业出版社,2009年)“不动点迭代法和牛顿法非线性方程组求解”(1).不动点迭代法非线性方程组求解(a).算法说明:设含有n个未知数与n个方程的非线性方程组记为:F(x)=0,然后把上述方程组改为便于迭代的等价形式:x=φ(x),由此就可以构造不动点迭代法的迭代公式:}满足,则就是φ的不动点,这样就可以求出非线性方程组的解.如果得到的序列{xk在MATLAB中编程实现的非线性方程组的不动点迭代法的函数为:mulStablePoint。
功能:用不动点迭代法求非线性方程组的一个解。
调用格式:[r,n]=mulStablePoint(x0,eps).其中,x0为初始迭代向量;eps为迭代精度;r为求出的解向量;n为迭代步数。
(b)。
流程图:(c).源程序代码:function [r,n]=mulStablePoint(x0,eps) %不动点迭代法求非线性方程组的一个解%初始迭代向量:x0%迭代精度:eps%解向量:r%迭代步数:nif nargin==1eps=1。
0e-4;endr=myf(x0);n=1;tol=1;while tol>epsx0=r;r=myf(x0);%迭代公式tol=norm(r-x0);%注意矩阵的误差求法,norm为矩阵的欧几里德范数n=n+1;if(n〉100000) %迭代步数控制disp(’迭代步数太多,可能不收敛!’);return;endend举例说明:解:首先建立myf.m函数文件,输入以下内容:function f=myf(x)f(1)=0.5*sin(x(1))+0。
1*cos(x(2)*x(1))-x(1);f(2)=0.5*cos(x(1))-0.1*sin(x(2))—x(2);在MATLAB命令窗口中输入:(2)。
牛顿拉夫逊法
并将雅可比矩阵分块,把每个2 2 阶子
阵
如MH
ij ij
Nij H ij
Lij
Rij
N ij S ij
等
作为分块矩阵的
元素,则按节点号顺序而构成的分块雅
可比矩阵将和节点导纳矩阵具有同样的
稀疏结构,是一个高度稀疏的矩阵。
(4) 和节点导纳矩阵具有相同稀疏结 构的分块雅可比矩阵在位置上对称,但 由于H ij H ji , Nij N ji , M ij M ji , Lij L ji , 所以雅可比矩阵不是对称阵。
由上式根据初值 x(0) 可求得第一次迭 代的修正量
x(0) [ f (x(0) )]1 f (x(0) ) (1-25)
将 x(0) 和 x(0) 相加,得到变量的第一次 改进值 x(1) 。
因此,应用牛顿法求解的迭代格式为
f (x(k ) )x(k ) f (x(k) )
(1-26)
x(k1) x(k ) x(k )
(2)修正xi(1)= xi(0)+ △xi(0) ,算出△f,J中各元素,代入 上式方程组,解出△ xi(1) ;
直至 f (x(k) ) 1 或 x(k) 2
注意:xi的初值要选得接近其精确值,否则将不迭代。
及 2n 1个,在 PV 节点比例不大时,两 者的方程式数目基本接近 2n 1个。
(2) 雅可比矩阵的元素都是节点电压 的函数,每次迭代,雅可比矩阵都需要 重新形成。
(3) 从雅可比阵非对角元素的表示式
可见,某个非对角元素是否为零决定于
相应的节点导纳矩阵元素 Yij 是否为零。
如将修正方程式按节点号的次序排列,
线性 迭代公式:
xk
1
xk
C语言求解非线性方程、线性方程组代码
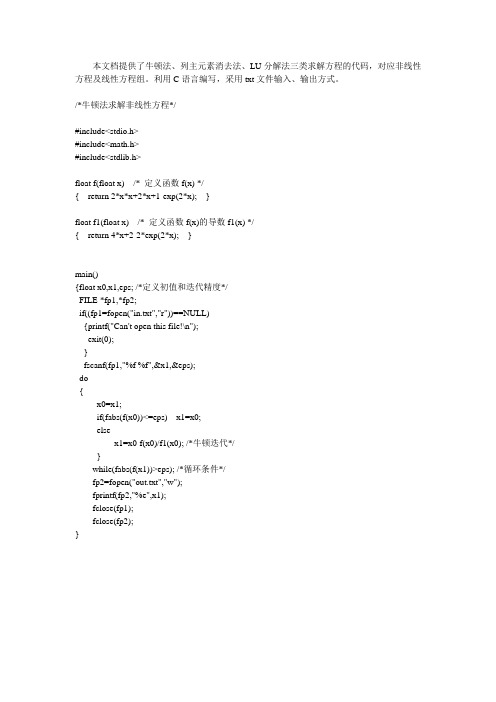
本文档提供了牛顿法、列主元素消去法、LU分解法三类求解方程的代码,对应非线性方程及线性方程组。
利用C语言编写,采用txt文件输入、输出方式。
/*牛顿法求解非线性方程*/#include<stdio.h>#include<math.h>#include<stdlib.h>float f(float x) /* 定义函数f(x) */{ return 2*x*x+2*x+1-exp(2*x); }float f1(float x) /* 定义函数f(x)的导数f1(x) */{ return 4*x+2-2*exp(2*x); }main(){float x0,x1,eps; /*定义初值和迭代精度*/FILE *fp1,*fp2;if((fp1=fopen("in.txt","r"))==NULL){printf("Can't open this file!\n");exit(0);}fscanf(fp1,"%f %f",&x1,&eps);do{x0=x1;if(fabs(f(x0))<=eps) x1=x0;elsex1=x0-f(x0)/f1(x0); /*牛顿迭代*/}while(fabs(f(x1))>eps); /*循环条件*/fp2=fopen("out.txt","w");fprintf(fp2,"%e",x1);fclose(fp1);fclose(fp2);}/*列主元素消去法求解线性方程组*/#include<stdio.h>#include<math.h>#include<stdlib.h>#define N 3void main(){ int i,j,k,mi; /*定义变量类型*/ float max,temp;float a[N][N],b[N],x[N],r[N][N+1];FILE *fp1; /*输入系数矩阵及列向量b*/ if((fp1=fopen("in.txt","r"))==NULL){printf("Can't open this file!\n");exit(0);}for(i=0;i<N;i++)for(j=0;j<N+1;j++)fscanf(fp1,"%f",&r[i][j]);fclose(fp1);for(i=0;i<N;i++)for(j=0;j<N;j++)a[i][j]=r[i][j];for(i=0;i<N;i++)b[i]=r[i][N];for(j=0;j<N-1;j++) /*找出列主元素并交换*/{for(i=j+1,mi=j,max=fabs(a[j][j]);i<N;i++)if(fabs(a[i][j])>max){mi=i;max=fabs(a[i][j]);}if(j<mi){temp=b[j];b[j]=b[mi];b[mi]=temp;for(k=j;k<N;k++){temp=a[j][k];a[j][k]=a[mi][k];a[mi][k]=temp;}}for(i=j+1;i<N;i++){temp=-a[i][j]/a[j][j];b[i]+=b[j]*temp;for(k=j;k<N;k++)a[i][k]+=a[j][k]*temp;}}x[N-1]=b[N-1]/a[N-1][N-1]; /*消去求解*/ for(i=N-2;i>=0;i--){x[i]=b[i];for(j=i+1;j<N;j++)x[i]-=a[i][j]*x[j];x[i]/=a[i][i];}FILE *fp2;fp2=fopen("out.txt","w");for(i=0;i<N;i++)fprintf(fp2,"x[%d]=%f\n",i+1,x[i]);fclose(fp2);}/*线性方程组的LU分解法*/#include<stdio.h>#include<math.h>#include<stdlib.h>#define N 3void main(){ int i,j,k,n;float temp;float a[N][N],b[N],x[N],y[N],L[N][N],U[N][N],r[N][N+1];FILE *fp1;if((fp1=fopen("in.txt","r"))==NULL){printf("Can't open this file!\n");exit(0);}for(i=0;i<N;i++)for(j=0;j<N+1;j++)fscanf(fp1,"%f",&r[i][j]);fclose(fp1);for(i=0;i<N;i++)for(j=0;j<N;j++)a[i][j]=r[i][j];for(i=0;i<N;i++)b[i]=r[i][N];for(i=0;i<N;i++) /*矩阵分解*/{U[0][i]=a[0][i];L[i][i]=1.0;L[i][0]=a[i][0]/a[0][0];for(j=i+1;j<N;j++){ L[i][j]=0;U[j][i]=0;}}for(i=1;i<N;i++){for(j=i;j<N;j++){temp=0;for(k=0;k<i;k++)temp=temp+L[i][k]*U[k][j];U[i][j]=a[i][j]-temp;}for(j=i;j<N;j++){temp=0;for(k=0;k<i;k++)temp=temp+L[j][k]*U[k][i];L[j][i]=(a[j][i]-temp)/U[i][i];}}y[0]=b[0]; /*解该线性方程组*/ for(i=1;i<N;i++){temp=0;for(j=0;j<i;j++)temp=temp+L[i][j]*y[j];y[i]=b[i]-temp;}x[N-1]=y[N-1]/U[N-1][N-1];for(i=N-2;i>=0;i--){x[i]=y[i];for(j=i+1;j<N;j++)x[i]-=U[i][j]*x[j];x[i]/=U[i][i];}FILE *fp2;fp2=fopen("out.txt","w");for(i=0;i<N;i++)fprintf(fp2,"x[%d]=%f\n",i+1,x[i]);fclose(fp2);}。
牛顿迭代法求根c语言

牛顿迭代法求根c语言牛顿迭代法是一种常用的数值计算方法,其可以用来求解非线性方程的根。
本文将介绍牛顿迭代法的基本原理和实现方法,并提供一些使用C语言实现牛顿迭代法求根的示例代码。
一、牛顿迭代法的原理在介绍牛顿迭代法的原理之前,我们先来看一个简单的例子。
假设我们要求解方程f(x) = 0的近似根,其中f(x)是一个可导函数。
我们可以通过利用切线来逼近方程f(x) = 0的根。
具体地,我们可以选择一个起始点x0,然后在x0处取得f(x0)的切线,将其延长到x轴上的交点x1,那么x1就是f(x) = 0的一个近似根。
可以通过数学方法得到x1的表达式:x1 = x0 - f(x0) / f'(x0)其中f'(x0)表示函数f(x)在x0处的导数。
换句话说,我们使用f(x)在x0处的切线来近似替代f(x)的图形,直到得到f(x) = 0的一个近似根为止。
这就是牛顿迭代法的基本思想。
牛顿迭代法的具体步骤如下:1. 选择一个起始点x0;2. 使用f(x)在x0处的切线来近似替代f(x)的图形;3. 在切线上取得x轴的交点x1; 4. 将x1作为新的起始点,重复步骤2和3,直到得到近似根。
二、牛顿迭代法的实现牛顿迭代法的实现过程比较简单,但需要注意一些细节。
具体实现可以分为以下几个步骤:1. 定义一个函数f(x),表示待求解的方程;2. 定义一个函数f_prime(x),表示函数f(x)在x处的导数;3. 定义一个起始点x0;4. 通过牛顿迭代公式计算出x1; 5. 将x1作为新的起始点,重复步骤4,直到满足精度要求为止。
下面,我们提供一段使用C语言实现牛顿迭代法求根的代码示例:```c #include<stdio.h> #include<math.h>#define EPSILON 0.0001double f(double x) { // 表示待求解的非线性方程 return x*x*x - x*x + 2; }double f_prime(double x) { // 表示f(x)在x 处的导数 return 3*x*x - 2*x; }double newton_raphson(double x) { // 牛顿迭代法求根 double x0 = x;while (1) { double x1 = x0 - f(x0) / f_prime(x0);if (fabs(x1 - x0) < EPSILON) return x1;x0 = x1; } }int main() { double x = 0;printf("The root is: %lf\n",newton_raphson(x));return 0; } ```代码中,定义了非线性方程f(x)和它在x处的导数f_prime(x),然后利用牛顿迭代法计算出方程的近似根。
解非线性方程组的牛顿法
考虑非线性方程组
f1(x1, x2, , xn ) 0,
f2(x1, x2, , xn ) 0,
fn (x1, x2, , xn ) 0. 利用向量记号写为
F (X ) O. 这里F (X )是定义在某区域D Rn上向量值函数. 若存在 X* D, 使得F (X*) O, 则称X*为非线性方程组的解.
.
逐次迭代得结果.
Step 5 Set x x y
Step 6 If y TOL then OUTPUT(x)
Step7 Set k k 1
STOP.
Step8 OUTPUT (‘Maximum number of iterations exceeded’) STOP.
为了说明上述算法,我们可以看看下面的例子。设
s1
145 272
,
145 272
T
.
x2 x1 s1 0.092,3.092 T .
显然,我们只经过两步计算,所得到的 x2就已经非常靠近 解 0,3T .
例1 用牛顿法求解方程组
k x (k) 0 (1.5, 1.0)T
f1( f2(
x1 x1
,x2 ,x2
) )
x1 2 x12
定理 2 设G : D Rn Rn在D内有一不动点X *且G在X *可导,
(G(X*)) 1, 则存在开球 S S( X*, ) D, 对X (0) S, 迭代序列{X (k)}
收敛于X *.
牛顿迭代公式:
X (k1) X (k) F( X (k) ) 1 F ( X (k) ),
其中
f1
F
(
X
(k
)
)
matpower中的牛顿拉夫逊算法代码 -回复
matpower中的牛顿拉夫逊算法代码-回复牛顿拉夫逊算法(Newton-Raphson Algorithm)是一种求解非线性方程组的数值解法,也被广泛应用于电力系统潮流计算中。
在MATPOWER软件包中,也使用了牛顿拉夫逊算法来求解电力系统的潮流方程。
本文将对牛顿拉夫逊算法在MATPOWER中的实现进行详细介绍,并逐步回答与该算法相关的问题。
文章将包括以下几个部分:1. 牛顿拉夫逊算法的原理和应用背景(200-300字);这一部分将简要介绍牛顿拉夫逊算法的基本原理和应用背景。
首先,牛顿拉夫逊算法是一种迭代法,用于解决非线性方程组。
其基本思想是通过迭代逼近线性化方程组的数值解,从而求解原始非线性方程组的近似解。
在电力系统潮流计算中,牛顿拉夫逊算法被广泛应用于求解节点功率不平衡方程。
2. MATPOWER中的牛顿拉夫逊算法介绍(300-400字);这一部分将详细介绍MATPOWER软件包中的牛顿拉夫逊算法的实现方式。
MATPOWER中使用了基于雅可比矩阵的牛顿拉夫逊算法。
首先,MATPOWER将潮流问题转化为一个非线性方程组,其中每个节点的功率平衡方程是一个非线性函数。
然后,牛顿拉夫逊算法将这个非线性方程组线性化,并构建雅可比矩阵。
通过迭代更新节点潮流信息,直到满足收敛准则为止。
3. 编写MATPOWER中的牛顿拉夫逊算法代码(500-700字);这一部分将详细介绍如何编写MATPOWER中的牛顿拉夫逊算法代码。
首先,需要定义潮流计算所需的输入参数,如发电机节点的功率注入、负荷节点的功率注入、节点的导纳信息等。
然后,需要构建节点功率平衡方程,并求取雅可比矩阵。
接下来,通过迭代计算更新节点的电压和相角,直到满足收敛准则为止。
最后,输出潮流计算结果。
4. 牛顿拉夫逊算法的优化和拓展(300-400字);这一部分将介绍牛顿拉夫逊算法的优化和拓展。
首先,对于大规模系统,牛顿拉夫逊算法的直接求解可能会导致计算量过大,因此可以使用快速牛顿法、改进牛顿法等进行优化。
c语言牛顿法求方程的根

c语言牛顿法求方程的根牛顿法是一种迭代求根的方法,可以求解非线性方程的根。
下面是用C语言实现牛顿法求方程的根的示例代码:```c#include <stdio.h>#include <math.h>// 要求解的方程double f(double x) {return x*x - 2; // 求解x^2 - 2 = 0的根}// 方程的导数double df(double x) {return 2*x; // 方程的导数为2x}// 牛顿法求根函数double newton(double x0, double epsilon) {double x = x0; // 初始值double delta; // 误差do {double fx = f(x);double dfx = df(x);delta = fx / dfx; // 迭代公式x = x - delta; // 迭代计算新的x} while (fabs(delta) > epsilon); // 判断误差是否小于给定的精度return x;}int main() {double x0 = 1; // 初始值double epsilon = 0.0001; // 精度double root = newton(x0, epsilon);printf("方程的根为:%lf\n", root);return 0;}```以上代码中,`f`函数表示要求解的方程,`df`函数表示方程的导数,`newton`函数是用牛顿法求方程的根的函数,`main`函数是主函数,用于测试求解结果。
在代码中,初始值`x0`和精度`epsilon`可以根据实际情况进行调整。
运行代码得到的输出结果为方程的根值。
非线性方程组计算
在科学与工程计算中,经常遇到求解非线性方程组的问题;非线性方程组在收敛速度及收敛性比线性方程组要差,特别对于非凸的非线性方程组,其求解更是困难。
下面简要介绍非线性方程组的三种解法——牛顿法、拟牛顿法、同伦算法,分析三种解法的适用性,并附Matlab 原程序。
(一)、牛顿迭代法迭代公式为:x k+1=x k-f(x k)/f'(x k);牛顿迭代法是解非线性方程组比较经典的方法,在局部收敛点附近是平方收敛的;但其解依赖于初始解,且迭代每一步都要计算f'(x k),不仅计算量大而且有时会发生计算困难。
(二)、拟牛顿迭代法拟牛顿法是为了解决求Jacobi矩阵时带来的困难,现已成为解决非线性方程组和最优化问题的最有效方法之一。
其迭代格式为:x(k+1)=x(k)-A k-1F(x(k))A k+1=A k+[(y k-A k s k)(y k-A k s k)T]/[(y k-A k s k)T s k]在一定条件下,计算H的序列是超收敛的,但稳定性较差,有时迭代效果不理想。
(三)、同伦算法同伦算法基本思想是从容易求解的方程组开始,逐步过渡到原方程组的求解,从而得到问题的解。
非线性方程组为:F(x)=0,其解为X*。
构造泛函 G:[0,1]XR n->R nG定义为:G(λ,x)=λ F(x)+(1-λ)[F(x)-F(x(0))]=F(x)+(λ-1)F(x(0))(其中:x(0)为任意给的初值,假定为λ函数(λ=0))对于λ的方程G(λ,x)=0,当λ=0时,0=G(0,x)=F(x)-F(x(0));x(0)是方程的解;当λ=1时,0=G(1,x)=F(x);x*是方程的解,即x(1)=x*基于这个思想我们最后可以得到如下关系式:x'(λ)=-[J(x(λ))]-1F(x(0)) ( 0<=λ<=1,对初始值x(0) )J为雅可比矩阵,由上面的式子,对λ在[0,1]上积分,就可得到x*=x(1)上面的非线性方程组问题就转化为数值积分问题。
利用牛顿迭代法求解非线性方程组

利⽤⽜顿迭代法求解⾮线性⽅程组最近⼀个哥们,是⽤⽜顿迭代法求解⼀个四变量⽅程组的最优解问题,从⽹上找了代码去改进,但是总会有点不如意的地⽅,迭代的次数过多,但是却没有提⾼精度,真是令⼈揪⼼!经分析,发现是这个⽅程组中存在很多局部的极值点,是⽤⽜顿迭代法不能不免进⼊局部极值的问题,更程序的初始值有关!发现⾃⼰好久没有是⽤Matlab了,顺便从⽹上查了查代码,⾃⼰来修改⼀下!先普及⼀下⽜顿迭代法:(来⾃百度百科)⽜顿(Newton's method)⼜称为⽜顿-拉夫逊(拉弗森)⽅法(Newton-Raphson method),它是在17世纪提出的⼀种在域和域上近似求解⽅程的⽅法。
多数⽅程不存在求根公式,因此求精确根⾮常困难,甚⾄不可能,从⽽寻找⽅程的近似根就显得特别重要。
⽅法使⽤函数f(x)的的前⾯⼏项来寻找⽅程f(x) = 0的根。
⽜顿迭代法是求⽅程根的重要⽅法之⼀,其最⼤优点是在⽅程f(x) = 0的单根附近具有平⽅收敛,⽽且该法还可以⽤来求⽅程的重根、复根,此时线性收敛,但是可通过⼀些⽅法变成超线性收敛。
另外该⽅法⼴泛⽤于计算机编程中。
设r是f(x)=0的根。
选取x0作为r的初始近似值,过点(x0,f(x0))做曲线的切线,求出该切线与x轴的交点,并求出该点的横坐标,称作x1是r 的⼀次近似。
如此就可以推导出⽜顿迭代公式。
已经证明,如果是的,并且待求的零点是孤⽴的,那么在零点周围存在⼀个区域,只要初始值位于这个邻近区域内,那么⽜顿法必定收敛。
并且,如果不为0, 那么⽜顿法将具有平⽅收敛的性能. 粗略的说,这意味着每迭代⼀次,⽜顿法结果的有效数字将增加⼀倍。
在⽹上查了⼀些代码,都是能指定某⼏个函数进⾏求导的,⽽且要是改变函数的个数,却⼜要对原始程序⼤动⼲⼽。
真的是揪⼼。
找到了这个程序,貌似在Matlab上不能很好的运⾏,对于数据的返回值为空没有做处理,后来⼜找了⼀个⽹易朋友的博客,将他的代码拿过来跑跑,还可以,但是对于不同的函数⽅程组,以及变量个数就不同了,真的是揪⼼,这个就是程序设计和编码的问题了!⾃⼰就拿来改了改,可以⽀持多⽅程组和多变量了!下⾯附上我的代码!求⼤家指导![python]1. function [r,n]=mulNewton(x0,funcMat,var,eps)2. % x0为两个变量的起始值,funcMat是两个⽅程,var为两个⽅程的两个变量,eps控制精度3. % ⽜顿迭代法解⼆元⾮线性⽅程组4. if nargin==05. x0 = [0.2,0.6];6. funcMat=[sym('(15*x1+10*x2)-((40-30*x1-10*x2)^2*(15-15*x1))*5e-4')...7. sym('(15*x1+10*x2)-((40-30*x1-10*x2)*(10-10*x2))*4e-2')];8. var=[sym('x1') sym('x2')];9. eps=1.0e-4;10. end11.12. n_Var = size(var,2);%变量的个数13. n_Func = size(funcMat,2);%函数的个数14. n_X = size(x0,2);%变量的个数15.16. if n_X ~= n_Var && n_X ~= n_Func17. fprintf('Expression Error!\n');18. exit(0);19. end20.21. r=x0-myf(x0, funcMat, var)*inv(dmyf(x0, funcMat, var));22. n=0;23. tol=1;24. while tol>=eps25. x0=r;26. r=x0-myf(x0, funcMat, var)*inv(dmyf(x0, funcMat, var));27. tol=norm(r-x0);28. n=n+1;29. if(n>100000)30. disp('迭代步数太多,⽅程可能不收敛');31. return;32. end33. end34. end % end mulNewton[python]1. function f=myf(x,funcMat, varMat)2. % 输⼊参数x为两个数值,func为1*2符号变量矩阵,var为1*2符号变量矩阵中的变量3. % 返回值为1*2矩阵,内容为数值4.5. n_X = size(x,2);%变量的个数6. f_Val = zeros(1,n_X);7. for i=1:n_X8. tmp_Var = cell(1,n_X);9. tmp_X = cell(1,n_X);10. for j=1:n_X11. tmp_Var{j} = varMat(1,j);12. tmp_X{j} = x(1,j);13. end14. f_Val(i) = subs(funcMat(1, i), tmp_Var, tmp_X);15. end16. f=f_Val;17. end % end myf[python]1. function df_val=dmyf(x, funcMat, varMat)2. % 返回值为2*2矩阵,内容为数值3. %df=[df1/x1, df1/x2;4. % df2/x1. df2/x2];5. n_X = size(x,2);%变量的个数6. df =cell(n_X, n_X);7. for i=1:n_X8. for j=1:n_X9. df{i,j} = diff(funcMat(1, i), varMat(1, j));10. end11. end12.13. df_val=zeros(n_X, n_X);14.15. for i=1:n_X16. for j=1:n_X17. tmp_Var = cell(1,n_X);18. tmp_X = cell(1,n_X);19. for k=1:n_X20. tmp_Var{k} = varMat(1,k);21. tmp_X{k} = x(1,k);22. end23. df_val(i,j) = subs(df{i,j}, tmp_Var, tmp_X);24. end25. end26. end % end dmyf。
(完整word版)c++求解非线性方程组的牛顿顿迭代法
void inv_jacobian(float yy[N][N],float inv[N][N])
{float aug[N][N2],L;
int i,j,k;
cout<<"开始计算雅克比矩阵的逆矩阵:"<<endl;
for (i=0;i<N;i++)
{ for(j=0;j<N;j++)
aug[i][j]=yy[i][j];
ff(x0,y0);//计算雅克比矩阵jacobian
ffjacobian(x0,jacobian);//计算雅克比矩阵的逆矩阵invjacobian
inv_jacobian(jacobian,invjacobian);//由近似解向量x0计算近似解向量x1
newdundiedai(x0, invjacobian,y0,x1);//计算差向量的1范数errornorm
yy[0][0]=2*x-2;
yy[0][1]=-1;
yy[1][0]=2*x;
yy[1][1]=8*y;
cout<<"雅克比矩阵是:"<<endl;
for( i=0;i<N;i++)
{for(j=0;j<N;j++)
cout<<yy[i][j]<<" ";
cout<<endl;
}
cout<<endl;
{ for(j=0;j<N2;j++)
cout<<aug[i][j]<<" ";
matlab牛顿法程序

matlab牛顿法程序牛顿法是一种常用的优化算法,主要用于求解非线性方程或最优化问题。
它基于一阶导数和二阶导数的信息,通过不断迭代逼近目标函数的零点或最小值。
在Matlab中,我们可以利用该语言的强大功能和简洁的语法编写牛顿法程序。
牛顿法的核心思想是利用二阶导数逼近目标函数,然后通过迭代来逼近方程的解。
设目标函数为f(x),则牛顿法的迭代公式为:x_{n+1} = x_n - f'(x_n) / f''(x_n)其中,x_n是当前的迭代点,f'(x_n)和f''(x_n)分别是目标函数在x_n处的一阶导数和二阶导数。
为了编写一个通用的牛顿法程序,我们需要先定义目标函数及其导数求解的函数。
以求解方程f(x) = 0为例,我们将定义一个函数newton_method(f, f_prime, x0, tol),其中f是目标函数,f_prime是一阶导数函数,x0是初始点,tol是迭代精度。
首先,我们需要定义目标函数和一阶导数函数:```matlabfunction y = f(x)y = x^2 - 2;endfunction y = f_prime(x)y = 2*x;end```接下来,我们可以定义牛顿法的主函数newton_method:```matlabfunction root = newton_method(f, f_prime, x0, tol)x = x0;while abs(f(x)) > tolx = x - f(x) / f_prime(x);endroot = x;end```在主函数中,我们使用一个while循环不断迭代,直到满足迭代精度tol。
每次迭代,我们更新x的值,逼近方程的解。
现在,我们可以调用newton_method函数来求解具体的方程。
假设我们要求解方程x^2 - 2 = 0,初始点x0取1,迭代精度tol取0.0001。
C++实现 牛顿迭代 解非线性方程组

C++实现牛顿迭代解非线性方程组(二元二次为例)求解{0=x*x-2*x-y+0.5;0=x*x+4*y*y-4;}的方程#include<iostream>#include<cmath>#define N 2 // 非线性方程组中方程个数、未知量个数#define Epsilon 0.0001 // 差向量1范数的上限#define Max 100 // 最大迭代次数using namespace std;const int N2=2*N;int main(){void ff(float xx[N],float yy[N]); //计算向量函数的因变量向量yy[N]void ffjacobian(float xx[N],float yy[N][N]); //计算雅克比矩阵yy[N][N]void inv_jacobian(float yy[N][N],float inv[N][N]); //计算雅克比矩阵的逆矩阵invvoid newdundiedai(float x0[N], float inv[N][N],float y0[N],float x1[N]);//由近似解向量x0 计算近似解向量x1float x0[N]={2.0,0.25},y0[N],jacobian[N][N],invjacobian[N][N],x1[N],errornorm;int i,j,iter=0;//如果取消对x0的初始化,撤销下面两行的注释符,就可以由键盘x读入初始近似解向量for( i=0;i<N;i++)cin>>x0[i];cout<<"初始近似解向量:"<<endl;for (i=0;i<N;i++)cout<<x0[i]<<" ";cout<<endl;cout<<endl;do{iter=iter+1;cout<<"第"<<iter<<" 次迭代开始"<<endl; //计算向量函数的因变量向量y0ff(x0,y0); //计算雅克比矩阵jacobianffjacobian(x0,jacobian); //计算雅克比矩阵的逆矩阵invjacobian inv_jacobian(jacobian,invjacobian); //由近似解向量x0 计算近似解向量x1 newdundiedai(x0, invjacobian,y0,x1); //计算差向量的1范数errornormerrornorm=0;for (i=0;i<N;i++)errornorm=errornorm+fabs(x1[i]-x0[i]);if (errornorm<Epsilon) break;for (i=0;i<N;i++)x0[i]=x1[i];} while (iter<Max);return 0;}void ff(float xx[N],float yy[N]) //调用函数{float x,y;int i;x=xx[0];y=xx[1];yy[0]=x*x-2*x-y+0.5;yy[1]=x*x+4*y*y-4; //计算初值位置的值cout<<"向量函数的因变量向量是:"<<endl;for( i=0;i<N;i++)cout<<yy[i]<<" ";cout<<endl;cout<<endl;}void ffjacobian(float xx[N],float yy[N][N]){float x,y;int i,j;x=xx[0];y=xx[1];//jacobian have n*n element //计算函数雅克比的值yy[0][0]=2*x-2;yy[0][1]=-1;yy[1][0]=2*x;yy[1][1]=8*y;cout<<"雅克比矩阵是:"<<endl;for( i=0;i<N;i++){for(j=0;j<N;j++)cout<<yy[i][j]<<" ";cout<<endl;}cout<<endl;}void inv_jacobian(float yy[N][N],float inv[N][N]) {float aug[N][N2],L;int i,j,k;cout<<"开始计算雅克比矩阵的逆矩阵:"<<endl; for (i=0;i<N;i++){ for(j=0;j<N;j++)aug[i][j]=yy[i][j];for(j=N;j<N2;j++)if(j==i+N) aug[i][j]=1;else aug[i][j]=0;}for (i=0;i<N;i++){ for(j=0;j<N2;j++)cout<<aug[i][j]<<" ";cout<<endl;}cout<<endl;for (i=0;i<N;i++){for (k=i+1;k<N;k++){L=-aug[k][i]/aug[i][i];for(j=i;j<N2;j++)aug[k][j]=aug[k][j]+L*aug[i][j];}}for (i=0;i<N;i++){ for(j=0;j<N2;j++)cout<<aug[i][j]<<" ";cout<<endl;cout<<endl;for (i=N-1;i>0;i--){for (k=i-1;k>=0;k--){L=-aug[k][i]/aug[i][i];for(j=N2-1;j>=0;j--)aug[k][j]=aug[k][j]+L*aug[i][j];}}for (i=0;i<N;i++){ for(j=0;j<N2;j++)cout<<aug[i][j]<<" ";cout<<endl;}cout<<endl;for (i=N-1;i>=0;i--)for(j=N2-1;j>=0;j--)aug[i][j]=aug[i][j]/aug[i][i];for (i=0;i<N;i++){ for(j=0;j<N2;j++)cout<<aug[i][j]<<" ";cout<<endl;for(j=N;j<N2;j++)inv[i][j-N]=aug[i][j];}cout<<endl;cout<<"雅克比矩阵的逆矩阵:"<<endl; for (i=0;i<N;i++){ for(j=0;j<N;j++)cout<<inv[i][j]<<" ";cout<<endl;cout<<endl;}void newdundiedai(float x0[N], float inv[N][N],float y0[N],float x1[N]) {int i,j;float sum=0;for(i=0;i<N;i++){ sum=0;for(j=0;j<N;j++)sum=sum+inv[i][j]*y0[j];x1[i]=x0[i]-sum;}cout<<"近似解向量:"<<endl;for (i=0;i<N;i++)cout<<x1[i]<<" ";cout<<endl;cout<<endl;}。
用牛顿法求解非线性方程
function x=Steffsen(A,B) n=length(B); x=zeros(n,1); x(1)=B(1); for i=2:n x(i)=A(i)-((B(i-1)-A(i))^2)/(B(i)-2*B(i-1)+A(i)); end
④ %构造迭代算法 x=(3*x+5)/(x^2)
'
x1 x* L( x0 x* )
* * 若将校正值 x1 ( x0 ) 再迭代一次,又得 x2 ( x1 ) 由于 x2 x L( x1 x )
将它与前面的式子联立,消去未知的 L,有
x1 x* x0 x* x2 x* x1 x*
由此推知
⑥ %构造迭代算法 x=(3*x+5)^(1/3) function x=diedai3(x0,tol,N) %x0 是初值,tol 为迭代精度,N 是迭代最大次数
第9页
数值分析实验指导
x=zeros(N,1); x(1)=x0; k=1; t=0; while k<=N for i=2:N x(i)=(3*x(i-1)+5)^(1/2); end k=k+1; t=x(i)-x(i-1); if abs(t)<=tol end end break;
迭代公式 6: x6 = 2.0000 2.3333 2.2806 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790
第5页
数值分析实验指导 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790
从上述的运算结果可以看出,迭代公式 1、2、4 不收敛,3 虽然收敛,但与其他迭代法 的结果差异太大,对 5 和 6 分别用埃特金加速和斯特芬森迭代得到结果如下: 对于 5 埃特金加速结果: B= 2.0000 2.2804 2.2791 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 2.2790 0 斯特芬森迭代结果: x= 2.0000 2.1547 2.2792 2.2790 2.2790 2.2790
python 牛顿法解方程

python 牛顿法解方程摘要:1.引言2.牛顿法简介3.使用Python 实现牛顿法解方程4.结论正文:【引言】牛顿法是一种求解非线性方程组的数值方法,它的基本思想是通过迭代使得函数值逐步逼近零。
在众多编程语言中,Python 作为一门广泛应用于科学计算的语言,其对于数值计算的支持十分友好。
本文将介绍如何使用Python 实现牛顿法解方程。
【牛顿法简介】牛顿法,又称为牛顿- 拉夫逊法,是一种求解非线性方程组的迭代方法。
它的基本思想是选取一个初始值,通过迭代使得函数值逐步逼近零。
牛顿法的迭代公式如下:x[n+1] = x[n] - f(x[n]) / f"(x[n])其中,f(x) 表示目标函数,f"(x) 表示目标函数的导数。
【使用Python 实现牛顿法解方程】要使用Python 实现牛顿法解方程,我们需要首先导入相关的库,然后定义目标函数及其导数,最后通过迭代实现牛顿法。
下面是一个简单的示例:```pythonimport numpy as np# 定义目标函数def func(x):return x**3 - 3 * x**2 + 2 * x - 1# 定义目标函数的导数def func_prime(x):return 3 * x**2 - 6 * x + 2# 定义牛顿法函数def newton_method(x0):x = x0while True:x_new = x - func(x) / func_prime(x)if np.abs(x_new - x) < 1e-6:breakx = x_newreturn x# 选择初始值x0 = 1# 使用牛顿法求解x = newton_method(x0)# 输出结果print("解为:", x)```在这个示例中,我们定义了一个简单的目标函数及其导数,然后使用牛顿法函数求解方程。
通过迭代,我们可以得到方程的解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
void LU(int n,double *b,double ** A,double *detax);//本子函数用于计算线性方程组Ax=b的解,用LU分解法实现
//入口参数为方程维数n,右端项b,系数矩阵A
double *y=new double [n+1];//过渡向量
double **L = new double * [n+1];//为L矩阵开辟空间
for(i=0;i<n+1;i++)L[i]=new double [n+1];
double **U = new double * [n+1];//为U矩阵开辟空间
printf("\n");
printf("请依次输入初始迭代向量X0的各元素值,并按Enter键继续\n");
for(i=1;i<=n;i++)//输入A矩阵
{
scanf("%lf",&num);
x[i]=num;
}
//**************************************//
//**************迭代求解****************//
double *f=new double [n+1];//开辟空间用于存储f(xk)向量
double *detax=new double [n+1];//开辟空间用于存储△xk向量
printf("本程序中迭代精度设为10^(-7),用户可在主程序中改动此值\n");
printf("现在请输入非线性方程的维数n(方程个数):(按Enter键继续)\n");
scanf("%d",&n);
double *x=new double [n+1];//开辟解的存储空间,用于存储xk向量
for(i=0;i<n+1;i++)U[i]=new double [n+1];
//****对A进行LU分解****//
for(i=1;i<=n;i++)
{
L[i][i]=1;
}
for(j=1;j<=n;j++)
{
U[1][j]=A[1][j];
}
#include <stdio.h>
#include <math.h>
void function(double *x,double *f);//本子函数用于计算向量f(x)的值
//入口参数为方程x指针向量,f(x)向量指针
//detax用于存储方程组的解
void main()
{
int n,i,j,breakindex;
double num;
double error=0.0000001;//定义精度为10^(-7)
//***********信息输入***************//
printf("本函数用用牛顿法求解非线性方程组的解\n");
printf("用户在子函数function中输入方程组的信息,即依次输入fi(x)\n");
printf("用户在子函数Jacobi中输入Jacobi矩阵的信息,依次输入行与列\n");
/*#### 用户在子函数Jacobi中输入Jacobi矩阵的信息,依次输入行与列 #########*/
/*#### 用户按提示在程序执行的过程中输入方程的维数n,以及初始向量X0#########*/
/*#### 本程序中迭代精度设为10^(-7),用户可在主程序中改动此值 #########*/
for(i=n-1;i>=1;i--)
{
j=n;
sum=0;
while(j>i)
{
sum=sum+U[i][j]*detax[j];
j--;
}
detax[i]=(y[i]-sum)/U[i][i];
}
//************************//
{
sum=sum+L[i][j]*U[j][k];
}
L[i][k]=(A[i][k]-sum)/U[k][k];
}
}
}
//************************//
//********回带求解*******//
{
J[1][1]=2*x[1];
J[1][2]=2*x[2];
J[1][3]=2*x[3];
J[2][1]=4*x[1];
J[2][2]=2*x[2];
J[2][3]=-4;
J[3][1]=6*x[1];
J[3][2]=-4;
J[3][3]=2*x[3];
}
}
for(i=2;i<=n;i++)
{
L[i][1]=A[i][1]/A[1][1];
}
for(k=2;k<=n;k++)
{
for(j=k;j<=n;j++)//计算U[k][j]
{
sum=0;
for(i=1;i<=k-1;i++)
for(j=1;j<=n;j++)//判断迭代是否结束
{
if(abs(f[j])<error)breakindex=breakindex+1;
}
if(breakindex==n)break;
void Jacobi(double *x,double **J);//本子函数用于计算Jacobi矩阵的值
//入口参数为向量x的指针和J矩阵的指针
{
f[1]=pow(x[1],2)+pow(x[2],2)+pow(x[3],2)-1;
f[2]=2*pow(x[1],2)+pow(x[2],2)-4*x[3];
f[3]=3*pow(x[1],2)-4*x[2]+pow(x[3],2);
}
void Jacobi(double *x,double **J)//本子函数用于计算Jacobi矩阵的值,入口参数为向量x的指针和J矩阵的指针
sum=sum+L[k][i]*U[i][j];
}
U[k][j]=A[k][j]-sum;
}
if(k<n)//在k<n时计算L[i][k]
{
for(i=k+1;i<=n;i++)
{
sum=0;
for(j=1;j<=k-1;j++)
}
//***************************************//
//*************信息输出*****************//
printf("经过 %d 次迭代,此非线性方程组的解如下:\n",i);
for(i=1;i<=n;i++)
double **J = new double * [n+1];//为Jacobi矩阵开辟空间
for(i=0;i<n+1;i++)J[i]=new double [n+1];
for(i=1;;i++)//进行迭代
{
function(x,f);//计算此时的f(x)向量
Jacobi(x,J);//计算此时的Jacobi矩阵
LU(n,f,J,detax);//用LU分解法求△x
for(j=1;j<=n;j++)//xk+1=xk+△x
{
x[j]=x[j]-detax[j];
}
y[1]=b[1];//计算y
for(i=2;i<=n;i++)
{
j=1;
sum=0;
while(j<i)
{
sum=sum+L[i][j]*y[j];
j++;
}
y[i]=b[i]-sum;
}
detax[n]=y[n]/U[n][n];//计算△x
void LU(int n,double *b,double ** A,double *detax)//本子函数用于计算线性方程组Ax=b的解,用LU分解实现,入口参数为方程维数n,右端项b,系数矩阵A,其中detax用于存储方程组的解
{
int i,j,k;
double sum;
/*#### 程序输出为满足精度要求的方程组的解 #########*/
/*#### 本程序已经调试,作者:沈欢,邮箱:holyshen@ #########*/
/*############################################################################*/
/*############################################################################*/
/*#### 本函数用用牛顿法求解非线性方程组的解 #########*/