GPIO驱动
GPIO驱动原理

GPIO设备驱动原理
在Linux系统下,字符设备和块设备的主要区别是:在对字符设备发出读/写请求时,实际的硬件I/O操作就紧接着发生了。块设备则不然,它利用一块系统内存作缓冲区,当用户进程对设备请求能满足用户的要求,就返回请求的数据;如果不能,就调用请求函数来进行实际的I/O操作。块设备是主要针对磁盘等慢速译成模块以供动态加载。由于嵌入式Linux支持静态编译和动态加载两种模式,如果考虑到精简内核的需要,这里可以使用动态加载的方法来实现驱动的装载。
设备驱动程序必须向Linux核心或者它所在的子系统提供一个标准的接口。例如,USB驱动程序向Linux核心提供了一个设备文件I/O接口,GPIO设备驱动程序向GPIO子系统提供了GPIO设备接口,接着向核心提供了文件I/O和缓冲区的接口。
linux内核gpio用法

linux内核gpio用法Linux内核对GPIO的使用是非常广泛的,本文将会通过几个步骤来解释如何在Linux内核中使用GPIO,包括GPIO的基本知识、配置GPIO、读取GPIO值、设置GPIO值和释放GPIO资源。
一、GPIO的基本知识GPIO(General Purpose Input/Output)是一种通用的输入/输出接口,它可以与各种设备进行连接,比如传感器、开关、LED等。
在Linux内核中,GPIO 被抽象为一个特殊的设备,可以通过相应的驱动程序进行读写操作。
每个GPIO引脚都被赋予了一个唯一的数字编号,这个编号称为GPIO号。
在不同的硬件平台上,GPIO号可能不同,因此在使用GPIO之前,需要先了解具体的GPIO号对应关系。
二、配置GPIO在使用GPIO之前,需要先配置GPIO的功能和方向,可以通过以下步骤来实现。
步骤1:加载GPIO驱动程序在Linux内核中,GPIO驱动程序以模块的形式存在,首先需要加载相应的GPIO 驱动程序。
可以使用如下命令加载GPIO驱动程序:modprobe gpio步骤2:导出GPIO引脚在Linux内核中,GPIO引脚默认是不可用的,需要先导出GPIO引脚,才能使用。
可以使用如下命令导出GPIO引脚:echo GPIO号> /sys/class/gpio/export其中,GPIO号为需要导出的GPIO引脚的编号。
步骤3:配置GPIO方向GPIO引脚有输入和输出两种方向,需要根据实际需求选择。
可以使用如下命令配置GPIO方向:echo in/out > /sys/class/gpio/gpioGPIO号/direction其中,in表示输入方向,out表示输出方向。
三、读取GPIO值配置好GPIO方向后,就可以读取GPIO引脚的值了。
可以使用如下命令读取GPIO值:cat /sys/class/gpio/gpioGPIO号/value其中,GPIO号为需要读取值的GPIO引脚的编号。
gpio读写操作
gpio读写操作GPIO(General Purpose Input/Output)是一种通用输入输出接口,广泛应用于各种嵌入式系统,如微控制器、树莓派、Arduino等。
GPIO操作主要用于与外部硬件设备进行交互,包括读取传感器数据、控制执行器等。
本文将介绍GPIO的基本概念、读写操作方法以及应用实例。
一、GPIO基础GPIO通常通过特定的引脚与外部设备进行通信。
这些引脚可以设置为输入模式(从外部设备读取数据)或输出模式(向外部设备发送数据)。
GPIO通常被用来驱动LED灯、蜂鸣器、继电器等简单硬件设备。
此外,GPIO还常常用于控制微控制器或其他硬件的外设。
1. 初始化GPIO在进行GPIO读写操作前,需要先进行初始化。
具体来说,需要配置GPIO引脚的电气特性,如高低电平、上拉/下拉电阻等。
初始化通常在程序启动时进行。
2. 读取GPIO状态读取GPIO状态是指从GPIO引脚读取当前状态,即判断该引脚是高电平还是低电平。
可以通过查询引脚的值或者使用取反操作来获取状态。
3. 设置GPIO值设置GPIO值是指向GPIO引脚写入数据,以控制外部设备的动作。
通常使用输出操作来完成。
需要注意的是,不同的硬件平台可能具有不同的数据类型和寄存器,需要根据具体的硬件平台进行设置。
4. 配置GPIO为输入模式将GPIO配置为输入模式是指将该引脚设置为从外部设备读取数据。
当引脚接收到外部信号时,会自动将其状态存储起来,以便后续读取。
在输入模式下,通常需要配置适当的上拉或下拉电阻以避免悬空。
三、应用实例以下是一个简单的应用实例,演示如何使用树莓派和Python编程语言进行GPIO读写操作:1. 初始化GPIO在Python中,可以使用RPi.GPIO模块来操作树莓派的GPIO引脚。
首先,需要导入该模块并使用setup()函数初始化GPIO。
例如:RPi.GPIO.setmode(RPi.GPIO.BOARD) # 设置模式为板载模式RPi.GPIO.setup(12, RPi.GPIO.OUT) # 将引脚12设置为输出模式2. 读取GPIO状态可以使用input()函数来读取GPIO的状态。
基于rk3568的linux驱动开发——gpio知识点 -回复

基于rk3568的linux驱动开发——gpio知识点-回复基于rk3568的Linux驱动开发——GPIO知识点GPIO(General Purpose Input/Output)是通用输入输出的意思,是嵌入式系统中的常用功能。
在rk3568芯片上,GPIO用于实现与外部设备的通信和控制,比如控制LED灯、键盘、电机等。
本文将介绍rk3568芯片上的GPIO控制器、GPIO驱动的开发以及GPIO 在Linux系统中的应用。
一、GPIO控制器在rk3568芯片中,GPIO控制器是用来控制GPIO端口的硬件模块。
每个GPIO控制器可以管理多个GPIO端口,每个GPIO端口可以被配置为输入或输出。
GPIO控制器通常包含寄存器用于配置和控制GPIO端口的功能,比如方向、电平等。
二、GPIO驱动的开发GPIO驱动是用于控制和管理GPIO功能的软件模块。
在Linux内核中,GPIO驱动通过sysfs接口暴露给用户空间,以便用户可以通过文件系统访问和控制GPIO端口。
以下是GPIO驱动的开发过程:1. 确定GPIO控制器和GPIO端口:首先需要确定要使用的GPIO控制器和GPIO端口。
在rk3568芯片手册中可以找到相应的信息。
2. 创建GPIO设备:在Linux内核中,GPIO驱动是通过GPIO子系统来管理的。
首先需要在设备树中添加GPIO设备描述,并分配一个唯一的GPIO号码。
3. 注册GPIO设备:在驱动的初始化函数中,需要调用相应的函数注册GPIO设备,以便系统能够识别和管理该设备。
4. 设置GPIO模式和方向:通过调用GPIO控制器的寄存器,可以设置GPIO端口的模式和方向。
例如,可以将GPIO端口配置为输入模式或输出模式。
5. 读取和写入GPIO值:读取GPIO值可以通过读取GPIO控制器的寄存器来实现,写入GPIO值可以通过写入GPIO控制器的寄存器来实现。
例如,可以将GPIO端口的电平设置为高或低。
基于rk3568的linux驱动开发——gpio知识点
基于rk3568的linux驱动开发——gpio知识点基于rk3568的Linux驱动开发——GPIO知识点一、引言GPIO(General Purpose Input/Output)通用输入/输出,是现代计算机系统中的一种常用接口,它可以根据需要配置为输入或输出。
通过GPIO 接口,我们可以与各种外设进行通信,如LED灯、按键、传感器等。
在基于Linux系统的嵌入式设备上开发驱动程序时,熟悉GPIO的使用是非常重要的一环。
本文将以RK3568芯片为例,详细介绍GPIO的相关知识点和在Linux驱动开发中的应用。
二、GPIO概述GPIO是系统中的一个基本的硬件资源,它可以通过软件的方式对其进行配置和控制。
在嵌入式设备中,通常将一部分GPIO引脚连接到外部可编程电路,以实现与外部设备的交互。
在Linux中,GPIO是以字符设备的形式存在,对应的设备驱动为"gpiolib"。
三、GPIO的驱动开发流程1. 导入头文件在驱动程序中,首先需要导入与GPIO相关的头文件。
对于基于RK3568芯片的开发,需要导入头文件"gpiolib.h"。
2. 分配GPIO资源在驱动程序中,需要使用到GPIO资源,如GPIO所在的GPIO Bank和GPIO Index等。
在RK3568芯片中,GPIO资源的分配是通过设备树(Device Tree)来进行的。
在设备树文件中,可以定义GPIO Bank和GPIO Index等信息,以及对应的GPIO方向(输入或输出)、电平(高电平或低电平)等属性。
在驱动程序中,可以通过设备树接口(Device Tree API)来获取这些GPIO资源。
3. GPIO的配置与控制在驱动程序中,首先要进行GPIO的初始化与配置。
可以通过函数"gpiod_get()"来打开指定的GPIO,并判断其是否有效。
如果成功打开GPIO,则可以使用函数"gpiod_direction_output()"或"gpiod_direction_input()"来设置GPIO的方向,分别作为输出或输入。
GPIO用法及应用流程

GPIO用法及应用流程GPIO(General Purpose Input/Output)是一种通用输入/输出接口,用于连接嵌入式系统的外部设备和传感器。
它可以通过编程来控制和读取外部设备的状态,并在嵌入式系统中实现各种应用功能。
下面将详细介绍GPIO的用法及应用流程。
一、GPIO的用法:1.引脚模式设置:GPIO的引脚可以设置为输入模式(用于读取外部设备的状态)或输出模式(用于控制外部设备的状态)。
2.引脚方向设置:输入模式的引脚可以设置为上拉电阻或下拉电阻,以防止悬浮状态产生误判;输出模式的引脚可以设置为高电平或低电平。
3.引脚状态读取与控制:可以通过读取引脚的电平状态来获取外部设备的状态信息;也可以通过控制引脚的电平状态来控制外部设备的行为。
4.中断与事件:可以在引脚电平变化时产生中断或触发事件,以便及时响应引脚的状态变化。
5.管理多个引脚:可以同时管理多个GPIO引脚,实现更复杂的应用功能。
二、GPIO的应用流程:1.引脚初始化:在使用GPIO之前,需要将相关引脚初始化为输入或输出模式,并设置正确的引脚方向、上拉/下拉电阻等属性。
2.读取引脚状态:通过读取引脚的电平状态来获取外部设备的状态信息。
可以使用轮询方式或中断方式进行读取。
3.控制引脚状态:通过控制引脚的电平状态来控制外部设备的行为。
可以将引脚设置为高电平或低电平,或者使用PWM(脉冲宽度调制)方式进行精确控制。
4.处理引脚中断/事件:当引脚发生电平变化时,可以通过中断或事件的方式及时响应引脚的状态变化,进而执行相应的处理任务。
5.循环读取/控制:通常情况下,GPIO的读取和控制操作需要在一个循环中进行,以不断更新外部设备的状态或响应外部变化。
三、GPIO的应用示例:1.LED控制:将GPIO引脚设置为输出模式,通过控制引脚的电平状态来控制LED的亮灭。
2.按钮读取:将GPIO引脚设置为输入模式,读取按钮的电平状态来判断按钮是否被按下。
介绍gpio的八种工作模式,特点及应用场景
介绍gpio的八种工作模式,特点及应用场景【标题】深入介绍GPIO的八种工作模式,揭秘特点及广泛应用场景【导言】GPIO(General Purpose Input/Output)是通用输入输出引脚的简称,它是现代电子设备中非常重要的一个接口,广泛应用于各个领域,如嵌入式系统、电子工程、物联网等。
GPIO的工作模式决定了其功能特性和应用场景的选择。
本文将全面深入地介绍GPIO的八种工作模式,探讨其特点并揭示其广泛应用场景,以帮助读者更好地理解和应用GPIO接口。
【正文】1. 输入模式输入模式是GPIO最基本的工作模式之一,用于读取外部信号的逻辑电平状态。
在输入模式下,GPIO引脚接收外界电平变化,并将其转换成对应的逻辑值,供处理器或者其他IC进行处理。
常见的应用场景包括按键输入、传感器数据采集等。
2. 输出模式输出模式是GPIO的另一个基础工作模式,用于控制外部设备的电平状态。
在输出模式下,GPIO引脚会根据处理器的指令输出相应的电平信号,驱动外部设备进行工作。
控制LED灯、驱动电机等。
3. 开漏输出模式开漏输出模式是GPIO的一种特殊输出模式,它允许多个输出引脚连接到一个电平上拉电阻上,实现共享一个信号线的目的。
开漏输出模式常用于总线通信(I2C、SPI)等场景,同时也可以用于实现外部电平转换。
4. 串行模式(UART)串行模式是GPIO的一种高级工作模式,常用于数据通信。
UART (Universal Asynchronous Receiver/Transmitter)是一种常见的串行通信协议,它通过GPIO的输入和输出引脚实现数据的发送和接收。
串行模式在无线通信、蓝牙、WiFi模块等场景中得到了广泛应用。
5. PWM模式PWM(Pulse Width Modulation)模式是GPIO的一种特殊输出模式,用于控制脉冲宽度的调节。
通过在不同时间段内改变高电平和低电平的占空比,可以控制输出引脚产生不同的平均电压或者电流,从而实现对电机速度、LED亮度等的精确控制。
基于rk3568的linux驱动开发——gpio知识点 -回复

基于rk3568的linux驱动开发——gpio知识点-回复题目:基于rk3568的Linux驱动开发——GPIO知识点引言:GPIO(General Purpose Input Output)是一种通用的输入输出引脚,它不属于任何特定的总线协议,可以通过软件来进行控制。
在Linux驱动开发中,GPIO起着重要的作用。
本文将以基于rk3568的Linux驱动开发为背景,深入探讨GPIO相关的知识点。
一、什么是GPIO?GPIO是一种通用的、数字的、非线性的输入输出引脚。
通常用于将处理器与外部硬件设备连接起来,实现信息的输入输出。
GPIO可以根据需要实现输入模式和输出模式的切换,灵活性很高。
二、rk3568的GPIO引脚配置rk3568是一款嵌入式处理器,支持GPIO功能。
在开始开发GPIO驱动之前,我们需要了解rk3568的GPIO引脚配置。
rk3568有多个GPIO组,每个组内有多个GPIO引脚。
通过GPIO引脚配置,我们可以控制GPIO 引脚的功能,如输入、输出、上拉、下拉等。
三、Linux GPIO子系统Linux操作系统提供了一个GPIO子系统,用于管理和控制GPIO。
对于每个GPIO引脚,Linux内核都为其分配了一个唯一的GPIO号码。
我们可以通过GPIO号码来操作和控制相关引脚。
四、驱动中的GPIO操作在Linux驱动中,我们可以通过GPIO接口进行GPIO操作。
下面是一些常用的GPIO操作函数:1. gpio_request(gpio, label):请求一个GPIO引脚用于驱动。
2. gpio_direction_input(gpio):将GPIO引脚配置为输入模式。
3. gpio_direction_output(gpio, value):将GPIO引脚配置为输出模式,并设置输出值。
4. gpio_get_value(gpio):读取GPIO引脚当前的值。
5. gpio_set_value(gpio, value):设置GPIO引脚的输出值。
mcu gpio驱动led 电流

MCU GPIO驱动LED的电流随着物联网技术的不断发展,嵌入式系统在各行各业得到了广泛的应用。
而在嵌入式系统中,GPIO(General Purpose Input/Output)引脚的驱动是非常重要的一部分。
本文将重点讨论MCU GPIO如何驱动LED的电流,以及在实际应用中的一些注意事项。
一、MCU GPIO引脚的基本概念GPIO引脚是嵌入式系统中用来输入输出数字信号的通用引脚,通常可以作为数字输入引脚和数字输出引脚使用。
在MCU中,GPIO通常由寄存器来控制,通过配置寄存器的不同位可以设置引脚的输入输出状态、上下拉电阻等参数。
二、LED的基本工作原理LED(Light Emitting Diode)是一种半导体器件,可以将电能转换成光能。
LED是一种双向电流器件,当正向电压大于其正向压降时,LED会发光。
在实际应用中,LED的亮度和颜色可以通过控制电流和电压来实现。
三、MCU GPIO驱动LED的电流1. 设置引脚方向和输出状态在驱动LED时,首先需要将GPIO引脚设置为输出状态,并输出高电平或低电平来控制LED的通断。
具体的配置方法和寄存器设置需要根据不同的MCU型号和厂家的文档来进行。
2. 选取适当的电阻在连接LED时,需要考虑限流电阻的选择。
限流电阻的作用是限制LED的电流,防止过流损坏LED。
一般来说,LED的电流可以根据其型号和规格来确定,根据欧姆定律可以计算出所需的限流电阻的阻值。
3. 控制LED的亮度除了控制LED的通断外,有时还需要控制LED的亮度。
在实际应用中,可以通过PWM(Pulse Width Modulation)来实现LED的调光。
通过改变PWM信号的占空比,可以改变LED通电时间的长短,从而控制LED的亮度。
4. 考虑电流保护在实际应用中,需要考虑LED的电流保护。
一般来说,可以在电路中加入保险丝或者过流保护电路来保护LED不受过流损坏。
四、在实际应用中的注意事项1. 根据LED的特性选择合适的限流电阻,避免过流损坏LED。
mcu gpio驱动led 电流
mcu gpio驱动led 电流MCU(Microcontroller Unit)GPIO(General Purpose Input/Output,通用输入输出)驱动LED(Light Emitting Diode,发光二极管)电流是在电路中通过GPIO引脚来控制LED亮度的一种方法。
通过合理设置GPIO引脚输出的电压和电流值,可以控制LED的亮度和闪烁频率。
在MCU中,每个GPIO引脚都有能力提供一定的电流。
不同型号的MCU在GPIO引脚上对电流的输出能力有所不同,因此在选择使用MCU GPIO驱动LED时,需要根据LED的工作电流和MCU的输出能力相匹配。
一般情况下,MCU的GPIO引脚输出电流能力在2-20mA之间。
而典型的LED工作电流为10-20mA。
因此,MCU GPIO的输出电流能力一般是能够满足LED的工作电流需求的。
在实际应用中,通过调整GPIO引脚的输出电压和电流值可以控制LED的亮度。
通常来说,当LED所需电流小于GPIO引脚的最大输出能力时,可以直接连接LED到GPIO引脚,并设置GPIO引脚输出高电平或低电平来控制LED的亮灭。
而当LED所需电流大于GPIO引脚的最大输出能力时,则需要通过外部电路来驱动LED。
常见的方法是使用电流放大器(如三极管)来放大GPIO引脚的电流,并驱动LED。
为了防止GPIO引脚被过大的电流负载所损坏,在驱动LED时,可以采取如下几种方法来保护GPIO引脚:1. 使用串联电阻:在GPIO引脚和LED之间串联一个适当大小的电阻,来限制LED的电流。
这样可以确保电流不会超过GPIO引脚的最大输出能力。
2. 使用恒流驱动器:恒流驱动器可以提供一个稳定的电流输出,并根据LED的电阻值自动调整电压,使之恒流驱动LED。
这种方法可以确保LED的亮度始终保持稳定。
3. 使用外部电流放大器:当需要驱动大功率LED时,可以通过外部电流放大器来放大GPIO引脚的电流,以满足LED的需求。
《GPIO接口驱动》课件

在这个PPT课件中,我们将介绍GPIO接口驱动的基本原理、实现流程和应用 场景,以及开发步骤和调试方法。
什么是GPIO接口?
GPIO(General Purpose Input/Output)接口是一种通用的输入输出接 口,用于与外部设备通信和控制。它是计算机系统中的一种重要接口,在 嵌入式系统和物联网领域有广泛的应用。
GPIO接口的作用是什么?
GPIO接口的作用是实现CPU与外部设备之间的数据交换和控制信号传输。通 过GPIO接口,我们可以读取外部传感器的数据,控制LED灯的亮灭,以及与 其他外设进行通信。
GPIO接口驱动的作用是什么?
GPIO接口驱动的作用是将GPIO接口与操作系统进行适配,方便开发人员在 应用程序中使用GPIO接口。驱动程序负责对GPIO接口进行配置、读写操作, 提供给上层应用使用。
总结
1 优缺点
GPIO接口驱动的优点是灵活性高、可扩展性强,缺点是占用了CPU的一些资源。
2 发展趋势
随着物联网和嵌入式系统的发展,GPIO接口驱动将逐渐趋于成熟和标准化。
3 未来展望
GPIO接口驱动有望在更多的领域得到应用,为各种设备提供更灵活、可靠的数据交换和 控制方式。
GPIO接口驱动的实现
1
基本原理
了解GPIO接口的寄存器地址和寄存器配置,掌握GPIO控制器的工作原理。
2
实现流程
编写驱动程序代码,进行GPIO接口的初始化、读写和中断处理。
3
注意事项
理解GPIO接口的电气特性,注意输入输出的电平和速度要求。
GPIO接口驱动的应用
何时使用?
当需要对外部设备进行数 据交换和控制时,可以使 用GPIO接口驱动。
gpio的推挽输出驱动电路设计
gpio的推挽输出驱动电路设计【原创版】目录1.概述2.推挽输出驱动电路的工作原理3.推挽输出驱动电路的设计要点4.推挽输出驱动电路的实际应用5.总结正文1.概述GPIO(通用输入/输出)是微控制器中的一个重要外设,它可以通过编程配置为输入或输出模式。
在输出模式下,GPIO 可以驱动外部负载,如 LED、开关等。
为了提高 GPIO 的驱动能力,常常需要使用推挽输出驱动电路。
本文将详细介绍推挽输出驱动电路的设计方法。
2.推挽输出驱动电路的工作原理推挽输出驱动电路是一种双极型电路,它主要由两个互补的晶体管组成。
当 GPIO 输出高电平时,其中一个晶体管导通,另一个晶体管截止;当 GPIO 输出低电平时,两个晶体管的状态相反。
这样,在不同电平下,晶体管可以输出不同的电流,从而驱动外部负载。
3.推挽输出驱动电路的设计要点设计推挽输出驱动电路时,需要考虑以下几个方面:(1)选择合适的晶体管:为了提高驱动能力,需要选择电流放大系数较大的晶体管。
同时,为了保证电路的稳定性,还需要考虑晶体管的功耗、电压等参数。
(2)确定电阻值:在推挽输出驱动电路中,需要串联两个电阻来限制晶体管的电流。
电阻的值需要根据晶体管的参数和负载电流来确定。
(3)考虑电源电压对电路的影响:当电源电压较大时,晶体管的导通电流会增大,从而提高驱动能力。
但是,当电源电压较小时,晶体管的导通电流会减小,可能导致驱动能力不足。
因此,设计时需要根据实际电源电压来选择合适的晶体管和电阻。
4.推挽输出驱动电路的实际应用推挽输出驱动电路广泛应用于各种电子设备中,如 LED 驱动器、开关驱动器等。
在这些设备中,推挽输出驱动电路可以提高 GPIO 的驱动能力,从而实现对负载的稳定控制。
5.总结推挽输出驱动电路是一种有效的 GPIO 驱动电路,它可以提高 GPIO 的驱动能力,实现对负载的稳定控制。
在设计推挽输出驱动电路时,需要考虑晶体管的选择、电阻值的确定以及电源电压对电路的影响等因素。
gpio的推挽输出驱动电路设计
gpio的推挽输出驱动电路设计
GPIO的推挽输出驱动电路设计是指通过设计电路使得GPIO 能够输出高电平和低电平的信号,并能够驱动外部设备。
推挽输出是指输出信号可以同时提供高电平和低电平的能力。
推挽输出驱动电路通常包括一个NPN型晶体管和一个PNP型晶体管。
下面是一种常见的GPIO推挽输出驱动电路设计:
1. 将GPIO的输出端连接到PNP型晶体管的基极,配置为放大电路。
将PNP型晶体管的集电极连接到电源上,并通过一个负载电阻连接到地。
2. 将NPN型晶体管的基极连接到GPIO的输出端,配置为开关电路。
将NPN型晶体管的集电极连接到地,并将发射极连接到PNP型晶体管的基极。
3. 连接一个继电器或其他外部设备到PNP型晶体管的集电极和地之间。
继电器的控制端连接到NPN型晶体管的集电极和地之间。
这样设计的推挽输出驱动电路可以实现以下功能:
- 当GPIO输出低电平时,NPN型晶体管处于关闭状态,PNP 型晶体管处于导通状态。
继电器得到高电平信号,处于打开状态。
- 当GPIO输出高电平时,NPN型晶体管处于导通状态,PNP 型晶体管处于关闭状态。
继电器得到低电平信号,处于关闭状态。
该电路设计可以实现高电平和低电平的推挽输出,适用于需要驱动较大负载电流的场景。
设计时需要根据实际需要选择适当的晶体管和负载电阻,并结合所需的输入输出电平电流要求进行调整。
浅谈单片机的GPIO外部驱动电路(三极管驱动电路)
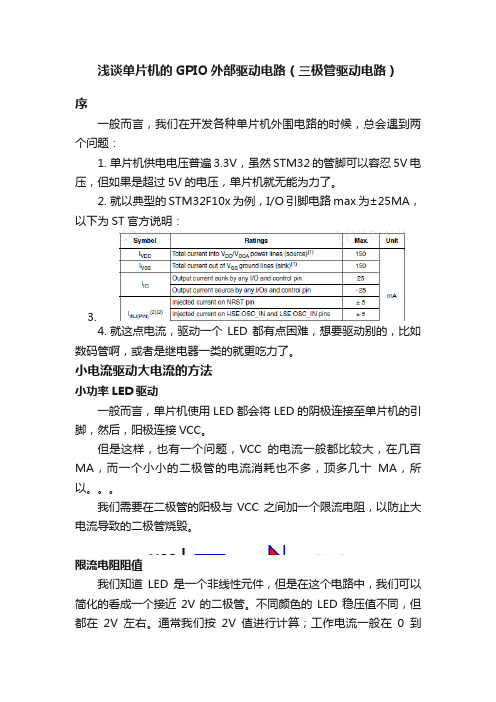
浅谈单片机的GPIO外部驱动电路(三极管驱动电路)序一般而言,我们在开发各种单片机外围电路的时候,总会遇到两个问题:1.单片机供电电压普遍3.3V,虽然STM32的管脚可以容忍5V电压,但如果是超过5V的电压,单片机就无能为力了。
2.就以典型的STM32F10x为例,I/O引脚电路max为±25MA,以下为ST官方说明:3.4.就这点电流,驱动一个LED都有点困难,想要驱动别的,比如数码管啊,或者是继电器一类的就更吃力了。
小电流驱动大电流的方法小功率LED驱动一般而言,单片机使用LED都会将LED的阴极连接至单片机的引脚,然后,阳极连接VCC。
但是这样,也有一个问题,VCC的电流一般都比较大,在几百MA,而一个小小的二极管的电流消耗也不多,顶多几十MA,所以。
我们需要在二极管的阳极与VCC之间加一个限流电阻,以防止大电流导致的二极管烧毁。
限流电阻阻值我们知道LED是一个非线性元件,但是在这个电路中,我们可以简化的看成一个接近2V的二极管。
不同颜色的LED稳压值不同,但都在2V左右。
通常我们按2V值进行计算;工作电流一般在0到25mA这个区间,最大工作电流具体还要看其温度特性,如果它工作环境比较恶劣,可能最大电流就只有8mA左右。
这个电流作为最大电压时的工作电流。
通常我们设计时取2mA到3mA左右即可。
因为电流再大,其亮度变化不明显。
这样我们就有了计算公式:当工作在直流5V系统时,其电阻结果是1k~1.5k左右,我们取1k。
限流电阻功率以及封装有了上面计算的电阻值和电流值,我们就能计算最大消耗功率。
由于消耗在电阻上的功耗是热量,交流可按有效值进行计算。
对于5V系统,电阻消耗:3V*3V/1k=9mW,稳定性及容差考虑取2倍功耗电阻,即>18mW;大功率继电器驱动首先,不得不说一下继电器的结构,简而言之,继电器的控制端就是一个电磁线圈,通电后,线圈变成了一个电磁铁,把触电的铁片吸附,来使受控端导通。
防止gpio模拟iic驱动被其他线程打断的方法
防止gpio模拟iic驱动被其他线程打断的方法防止GPIO模拟I2C驱动在多线程环境下被打断是一个重要的问题。
在这篇文章中,我将介绍一些方法来解决这个问题,以确保GPIO模拟I2C驱动的稳定性和可靠性。
首先,让我们了解一下什么是GPIO和I2C。
GPIO是通用输入输出端口,它可以用来控制外部设备或读取外部设备的状态。
而I2C是一种通信协议,它可以用于连接和控制多个设备,通过两根线进行数据传输。
在使用GPIO模拟I2C驱动时,我们需要保证驱动程序能够正确地处理并发访问和时序要求。
为了实现这一点,我们可以采取以下几个步骤:1. 锁定访问:在GPIO模拟I2C驱动中,我们可以使用信号量或互斥锁来实现对共享资源的访问控制。
当一个线程访问I2C总线时,它可以获得锁,阻止其他线程同时访问。
2. 设置优先级:在多线程环境中,我们可以通过设置线程的优先级来控制它们的执行顺序。
将GPIO模拟I2C驱动的线程设置为较高的优先级,可以确保它能够及时地响应,并且不会被低优先级的线程打断。
3. 中断处理:在一些特殊情况下,我们可能需要使用中断来处理GPIO模拟I2C驱动的数据请求。
通过配置中断处理程序,我们可以在需要时及时响应外部设备的请求,而不会被其他线程的操作打断。
4. 错误处理:在GPIO模拟I2C驱动中,我们应该实现错误处理机制,以便在发生错误时进行适当的处理。
例如,在发送或接收数据时发生错误,我们可以采取一些补救措施,如重新发送或重新接收数据,以确保数据的可靠性。
综上所述,要防止GPIO模拟I2C驱动在多线程环境下被打断,我们可以采取一系列的措施来确保驱动程序的稳定性和可靠性。
通过锁定访问、设置优先级、中断处理和错误处理等方法,我们可以保证GPIO模拟I2C驱动能够正确地处理并发访问和时序要求,从而实现可靠的数据传输和外设控制。
希望本文能够对需要实现GPIO模拟I2C驱动的开发者有所帮助,并能够在实际应用中发挥指导作用。
GPIO接口驱动PPT课件

GPIO接口控制
接口设置为输出:写入1则接口输出高电平;写入0则接口输出低电平 接口设置为输入:读取到1则接口输入高电平;读取到0则接口输入低电平 也可以复用为中断等其他功能接口
课程安排
GPIO接口控制原理 蜂鸣器驱动程序 温度传感器驱动程序
接口连接原理
PWM0对应GPF14
接口控制原理
DS18B20初始化
向DS18B20写数据
ARM(主机)向DS18B20(从机)写1位数据
向DS18B20写数据
从DS18B20读数据
ARM(主机)从DS18B20(从机)读1位数据
从DS18B20读数据
循环检测当前温度
上机实验
实验1、实现蜂鸣器驱动程序,并调用驱动接口控制蜂鸣器叫声 (1)、使用RVDS打开实验代码工程文件proj.mcp (2)、按要求增添驱动程序代码 (3)、实现驱动程序代码 (4)、利用驱动接口函数实现控制蜂鸣器叫声功能 (5)、构造可执行文件6410.bin (6)、将6410.bin文件下载到开发板运行 (7)、验证蜂鸣器叫声,并尝试调整延时时间,控制叫声尖锐度。
1、GPF14设置为输出 2、GPF14输出高电平,则三极管导通,蜂鸣器不工作 3、GPF14输出低电平,三极管不导通,蜂鸣器工作
接口驱动实现
课程安排
GPIO接口控制原理 蜂鸣器驱动程序 温度传感器驱动程序
DS18B20温度传感器
DS18B20温度传感器
DS18B20温度传感器
硬件连接原理
ARM核通过EINT8(GPN8)来控制ds18b20温度传感器
初始化配置与读取温度操作只能1位位进行,最后再组合成实际需要的字节数据
从DS18B20获取温度
GPIO控制器驱动-gpio_chip

GPIO控制器驱动-gpio_chip在中,我们处理了GPIO lines。
这些lines通过⼀个叫做GPIO控制器的特殊设备向系统开放。
本章将逐步解释如何为这些设备编写驱动程序,因此包括以下主题:GPIO控制器驱动结构和数据结构GPIO控制器的Sysfs接⼝GPIO控制器在DT中的表⽰驱动架构和数据结构此类设备的驱动程序应提供以下内容:建⽴GPIO⽅向(输⼊输出)的⽅法。
⽤于访问GPIO值的⽅法(get和set)。
将给定的GPIO映射到IRQ并返回相关的编号的⽅法。
⼀个表⽰对其⽅法的调⽤是否可以休眠的标志。
这⼀点⾮常重要。
⼀个可选的debugfs转储⽅法(显⽰额外的状态,如pullup config)。
⼀个叫做base number的可选的编号,GPIO编号应该从它开始。
如果省略,它将被⾃动分配。
在内核中,GPIO控制器被表⽰为在linux/ GPIO /driver.h中定义的结构体gpio_chip的实例:struct gpio_chip { const char *label; struct device *dev; struct module *owner; int (*request)(struct gpio_chip *chip, unsigned offset); void (*free)(struct gpio_chip *chip, unsigned offset); int (*get_direction)(struct gpio_chip *chip, unsigned offset); int (*direction_input)(struct gpio_chip *chip, unsigned offset); int (*direction_output)(struct gpio_chip *chip, unsigned offset, int value); int (*get)(struct gpio_chip *chip,unsigned offset); void (*set)(struct gpio_chip *chip, unsigned offset, int value); void (*set_multiple)(struct gpio_chip *chip, unsigned long *mask, unsigned long *bits); int (*set_debounce)(struct gpio_chip *chip, unsigned offset, unsigned debounce); int (*to_irq)(struct gpio_chip *chip, unsigned offset); int base; u16 ngpio; const char *const *names; bool can_sleep; bool irq_not_threaded; bool exported;#ifdef CONFIG_GPIOLIB_IRQCHIP /* * With CONFIG_GPIOLIB_IRQCHIP we get an irqchip * inside the gpiolib to handle IRQs for most practical cases. */ struct irq_chip *irqchip; struct irq_domain *irqdomain; unsigned int irq_base; irq_flow_handler_t irq_handler; unsigned int irq_default_type;#endif#if defined(CONFIG_OF_GPIO) /* * If CONFIG_OF is enabled, then all GPIO controllers described in the * device tree automatically may have an OF translation */ struct device_node *of_node; int of_gpio_n_cells; int (*of_xlate)(struct gpio_chip *gc, const struct of_phandle_args *gpiospec, u32 *flags);};下⾯是结构中每个元素的含义:request 是特定芯⽚激活的可选回调函数。
GPIO驱动程序及测试程序

GPIO驱动程序,主要是GIO_Control:BOOL GIO_IOControlDWORD hOpenContext,DWORD dwCode,PBYTE pBufIn,DWORD dwLenIn,PBYTE pBufOut,DWORD dwLenOut,PDWORD pdwActualOut{switchdwCode{case IO_CTL_GPIO_A_CON:v_pIOPregs->GPACON= DWORDpBufIn;//GPACON SETbreak;case IO_CTL_GPIO_A_DAT_OUTPUT:v_pIOPregs->GPADAT= DWORDpBufIn; //GPADAT SET OUTPUT also for Functional Pin break;case IO_CTL_GPIO_B_CON:v_pIOPregs->GPBCON= DWORDpBufIn;//GPBCON SETbreak;case IO_CTL_GPIO_B_DAT_INPUT:DWORDpBufOut=v_pIOPregs->GPBDAT; //GPBDAT SET INPUT also for Functional Pin break;case IO_CTL_GPIO_B_DAT_OUTPUT:v_pIOPregs->GPBDAT= DWORDpBufIn; //GPBDAT SET OUTPUT also for Functional Pin break;case IO_CTL_GPIO_B_UP:v_pIOPregs->GPBUP= DWORDpBufIn;//GPBUP SETbreak;case IO_CTL_GPIO_C_CON:v_pIOPregs->GPCCON= DWORDpBufIn;//GPCCON SETbreak;case IO_CTL_GPIO_C_DAT_INPUT:DWORDpBufOut=v_pIOPregs->GPCDAT; //GPCDAT SET INPUT also for Functional Pin break;case IO_CTL_GPIO_C_DAT_OUTPUT:v_pIOPregs->GPCDAT= DWORDpBufIn; //GPCDAT SET OUTPUT also for Functional Pin break;case IO_CTL_GPIO_C_UP:v_pIOPregs->GPCUP= DWORDpBufIn;//GPCUP SETbreak;case IO_CTL_GPIO_D_CON:v_pIOPregs->GPDCON= DWORDpBufIn;//GPDCON SETbreak;case IO_CTL_GPIO_D_DAT_INPUT:DWORDpBufOut=v_pIOPregs->GPDDAT; //GPDDAT SET INPUT also for Functional Pin break;case IO_CTL_GPIO_D_DAT_OUTPUT:v_pIOPregs->GPDDAT= DWORDpBufIn; //GPDDAT SET OUTPUT also for Functional Pin break;case IO_CTL_GPIO_D_UP:v_pIOPregs->GPDUP= DWORDpBufIn;//GPDUP SETbreak;case IO_CTL_GPIO_E_CON:v_pIOPregs->GPECON= DWORDpBufIn;//GPECON SETbreak;case IO_CTL_GPIO_E_DAT_INPUT:DWORDpBufOut=v_pIOPregs->GPEDAT; //GPEDAT SET INPUT also for Functional Pin break;case IO_CTL_GPIO_E_DAT_OUTPUT:v_pIOPregs->GPEDAT= DWORDpBufIn; //GPEDAT SET OUTPUT also for Functional Pin break;case IO_CTL_GPIO_E_UP:v_pIOPregs->GPEUP= DWORDpBufIn;//GPEUP SETbreak;case IO_CTL_GPIO_F_CON:v_pIOPregs->GPFCON= DWORDpBufIn;//GPFCON SETbreak;case IO_CTL_GPIO_F_DAT_INPUT:DWORDpBufOut=v_pIOPregs->GPFDAT; //GPFDAT SET INPUT also for Functional Pin break;case IO_CTL_GPIO_F_DAT_OUTPUT:v_pIOPregs->GPFDAT= DWORDpBufIn; //GPFDAT SET OUTPUT also for Functional Pin break;case IO_CTL_GPIO_F_UP:v_pIOPregs->GPFUP= DWORDpBufIn;//GPFUP SETbreak;case IO_CTL_GPIO_G_CON:v_pIOPregs->GPGCON= DWORDpBufIn;//GPGCON SETbreak;case IO_CTL_GPIO_G_DAT_INPUT:DWORDpBufOut=v_pIOPregs->GPGDAT; //GPGDAT SET INPUT also for Functional Pin break;case IO_CTL_GPIO_G_DAT_OUTPUT:v_pIOPregs->GPGDAT= DWORDpBufIn; //GPGDAT SET OUTPUT also for Functional Pin break;case IO_CTL_GPIO_G_UP:v_pIOPregs->GPGUP= DWORDpBufIn;//GPGUP SETbreak;case IO_CTL_GPIO_H_CON:v_pIOPregs->GPHCON= DWORDpBufIn;//GPHCON SETbreak;case IO_CTL_GPIO_H_DAT_INPUT:DWORDpBufOut=v_pIOPregs->GPHDAT; //GPHDAT SET INPUT also for Functional Pin break;case IO_CTL_GPIO_H_DAT_OUTPUT:v_pIOPregs->GPHDAT= DWORDpBufIn; //GPHDAT SET OUTPUT also for Functional Pin break;case IO_CTL_GPIO_H_UP:v_pIOPregs->GPHUP= DWORDpBufIn;//GPHUP SETbreak;case IO_CTL_GPIO_J_CON:v_pIOPregs->GPJCON= DWORDpBufIn;//GPJCON SETbreak;case IO_CTL_GPIO_J_DAT_INPUT:DWORDpBufOut=v_pIOPregs->GPJDAT; //GPJDAT SET INPUT also for Functional Pin break;case IO_CTL_GPIO_J_DAT_OUTPUT:v_pIOPregs->GPJDAT= DWORDpBufIn; //GPJDAT SET OUTPUT also for Functional Pin break;case IO_CTL_GPIO_J_UP:v_pIOPregs->GPJUP= DWORDpBufIn;//GPJUP SETbreak;default:break;}RETAILMSG0,TEXT"GPIO_Control:Ioctl code = 0x%x\r\n", dwCode;return TRUE;}测试程序,封装了2个输入输出GPIO函数,调用十分方便:include "stdafx.h"include "Relay2.h"include "Relay2Dlg.h"include "GPIO_Driver.h"ifdef _DEBUGdefine new DEBUG_NEWendifDWORD RData,BUFCON,BUFOUT,BUFIN; struct GPIO{DWORD GPIOCON;DWORD GPIOIN;DWORD GPIOOUT;};struct GPIO GPA={gpacon,NULL,gpaout }, GPB={gpbcon,gpbin,gpbout },GPC={gpccon,gpcin,gpcout },GPD={gpdcon,gpdin,gpdout },GPE={gpecon,gpein,gpeout },GPF={gpfcon,gpfin,gpfout },GPG={gpgcon,gpgin,gpgout },GPH={gphcon,gphin,gphout },GPJ={gpjcon,gpjin,gpjout }; //define and choose GPIO// CRelay2Dlg 对话框CRelay2Dlg::CRelay2DlgCWnd pParent /=NULL/: CDialogCRelay2Dlg::IDD, pParent{m_hIcon = AfxGetApp->LoadIconIDR_MAINFRAME;}void CRelay2Dlg::DoDataExchangeCDataExchange pDX{CDialog::DoDataExchangepDX;}BEGIN_MESSAGE_MAPCRelay2Dlg, CDialogif defined_DEVICE_RESOLUTION_AWARE && definedWIN32_PLATFORM_WFSP ON_WM_SIZEendif//}}AFX_MSG_MAPON_BN_CLICKEDIDC_BUTTON1, &CRelay2Dlg::OnBnClickedButton1 ON_BN_CLICKEDIDC_BUTTON2, &CRelay2Dlg::OnBnClickedButton2END_MESSAGE_MAP// CRelay2Dlg 消息处理程序BOOL CRelay2Dlg::OnInitDialog{CDialog::OnInitDialog;// 设置此对话框的图标;当应用程序主窗口不是对话框时,框架将自动// 执行此操作SetIconm_hIcon, TRUE;// 设置大图标SetIconm_hIcon, FALSE;// 设置小图标// TODO: 在此添加额外的初始化代码gpiodriver=CreateFileL"GIO1:",GENERIC_READ | GENERIC_WRITE, 0,NULL,OPEN_EXISTING,0,NULL ;//gpiodriver initifgpiodriverMessageBoxL"打开GPIO设备失败";return TRUE; // 除非将焦点设置到控件,否则返回TRUE}if defined_DEVICE_RESOLUTION_AWARE && definedWIN32_PLATFORM_WFSP void CRelay2Dlg::OnSizeUINT /nType/, int /cx/, int /cy/{if AfxIsDRAEnabled{DRA::RelayoutDialogAfxGetResourceHandle,this->m_hWnd,DRA::GetDisplayMode = DRA::PortraitMAKEINTRESOURCEIDD_RELAY2_DIALOG_WIDE : MAKEINTRESOURCEIDD_RELAY2_DIALOG;}}endifDWORD CRelay2Dlg::GPIOINPUTDWORD GPIOCON,DWORD GPIOIN,DWORD BUFCON,DWORD BUFOUT //the function is used for GPIO INPUT{ DWORD RData;DeviceIoControlgpiodriver,GPIOCON,&BUFCON,4,NULL,0,NULL,NULL;DeviceIoControlgpiodriver,GPIOIN,NULL,0,&BUFOUT,4,NULL,NULL;memcpy&RData,&BUFOUT,4;return RData;}DWORD CRelay2Dlg::GPIOINPUT1struct GPIO GP,USHORT NUM //the function is used for GPIO INPUT BETTER{BUFCON &=~3<<2NUM;DeviceIoControlgpiodriver,GP.GPIOCON,&BUFCON,4,NULL,0,NULL,NULL;DeviceIoControlgpiodriver,GP.GPIOIN,NULL,0,&BUFOUT,4,NULL,NULL;memcpy&RData,&BUFOUT,4;return RData;}VOID CRelay2Dlg::GPIOOUTPUTDWORD GPIOCON,DWORD GPIOOUT,DWORD BUFCON,DWORD BUFIN //the function is used for GPIO OUTPUT{DeviceIoControlgpiodriver,GPIOCON,&BUFCON,4,NULL,0,NULL,NULL;DeviceIoControlgpiodriver,GPIOOUT,&BUFIN,4,NULL,0,NULL,0;}VOID CRelay2Dlg::GPIOOUTPUT1struct GPIO GP,USHORT NUM,BYTE PINSTATE //the function is used for GPIO OUTPUT better{ifGP.GPIOIN=NULLBUFCON=BUFCON &~3<<2NUM|1<<2NUM;elseBUFCON &=~1<<NUM;ifPINSTATEBUFIN |=1<<NUM;elseBUFIN &=~1<<NUM;DeviceIoControlgpiodriver,GP.GPIOCON,&BUFCON,4,NULL,0,NULL,NULL;DeviceIoControlgpiodriver,GP.GPIOOUT,&BUFIN,4,NULL,0,NULL,0;}void CRelay2Dlg::OnBnClickedButton1{// TODO: 在此添加控件通知处理程序代码GPIOOUTPUT1GPB,8,1;GPIOINPUT1GPB,7;GPIOOUTPUT1GPB,6,0;GPIOOUTPUT1GPB,5,0;// GPIOOUTPUT1GPF,3,1; //GPF3 OUTPUT 1GPIOOUTPUT1GPF,2,0;//GPIOOUTPUT1GPG,5,0;//GPIOOUTPUT1GPG,7,1;}void CRelay2Dlg::OnBnClickedButton2{// TODO: 在此添加控件通知处理程序代码DWORD GetData;GetData =GPIOINPUT1GPF,6; //GPF4 INPUT ifGetData&=1<<6MessageBox_T"1";elseMessageBox_T"0";}。
gpio 驱动电流
gpio 驱动电流
GPIO是一种数字输出/输入接口,通常用于控制设备的开关。
GPIO 驱动电流是指在输出模式下,控制GPIO输出电平时所需要的电流。
在使用GPIO控制设备的过程中,通常需要将GPIO输出电平与设备的控制端口相连。
设备的控制端口通常需要一定的电流才能正常工作。
因此,GPIO驱动电流的大小直接影响设备的工作效果和稳定性。
在选择GPIO驱动电流时,需要根据设备的控制端口要求和GPIO 的驱动能力进行综合考虑。
通常情况下,GPIO的驱动能力越强,其输出电流也会相应增大。
除了GPIO驱动能力之外,其它因素如GPIO输出电压、负载电阻等也会影响GPIO的驱动电流。
在实际使用过程中需要进行细致的测试和调试,以保证GPIO的正常工作。
总之,GPIO驱动电流是控制设备的重要参数之一,合理选择和调整GPIO驱动电流可以提高设备的工作效率和稳定性。
- 1 -。
gpio详细解读 -回复
gpio详细解读-回复GPIO详细解读GPIO,全称为通用输入输出接口(General Purpose Input/Output),是一种在计算机系统中用于与外部设备进行数字通信的接口。
它允许计算机与各种不同类型的外设进行通信,并且可以通过软件控制这些外设的输入和输出。
在本文中,我将逐步回答关于GPIO的各种问题,以帮助读者全面理解和使用GPIO接口。
一、GPIO概述GPIO是计算机系统与外部设备之间的桥梁,它通过引脚(pin)与外设相连,使用数字信号进行通信。
每个引脚可以配置为输入或输出模式,以实现不同的功能。
GPIO接口的灵活性和通用性使其成为计算机系统的核心部分。
二、GPIO引脚GPIO引脚是与外部设备相连的物理引脚,它们通常以数字方式编号,并且可以通过引脚号来识别和访问。
常见的计算机系统通常具有多个GPIO引脚,可以通过软件将它们配置为输入或输出模式。
三、GPIO模式GPIO引脚可以配置为输入或输出模式,取决于与之相连的外部设备类型和应用需求。
在输入模式下,GPIO引脚可以接收来自外设的信号,并将其传递到计算机系统;而在输出模式下,GPIO引脚可以发送计算机系统生成的信号到外设。
四、GPIO寄存器GPIO寄存器是计算机系统中用于配置和控制GPIO引脚的寄存器。
通过读写这些寄存器的值,可以设置GPIO引脚的工作模式、电平状态和其他参数。
使用GPIO寄存器可以实现对GPIO接口的灵活编程控制。
五、GPIO驱动程序为了简化对GPIO的操作,操作系统通常提供了GPIO驱动程序。
通过调用这些驱动程序提供的接口函数,可以更方便地实现对GPIO引脚的配置和控制。
驱动程序隐藏了底层硬件细节,使开发人员能够更专注于应用程序的开发。
六、GPIO使用示例以下是一个简单的GPIO使用示例,以帮助读者更好地理解GPIO接口的工作原理。
1. 引脚配置:首先,需要选择一个GPIO引脚,并将其配置为输入或输出模式。
这可以通过操作GPIO寄存器来实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 2 字符设备管理数组
这嵌先进的 ARM920T微处理器核 。 S3C2410
的 GP IO 因其数据只能按顺序访问而被列为 L inux字
符设备 。该设备的 file_operations结构定义如下 :
struct file_operations s3c2410_gp io_fop s =
关键词 : 嵌入式 L inux;设备驱动程序 ;内核模块 ; GP IO 中图分类号 : TP39 文献标识码 : B 文章编号 : 1006 - 2394 (2009) 06 - 0012 - 03
D evelopm en t of GP IO D ev ice D r ivers in the Em bedded L inux
驱动的函数 。用户是通过设备文件同硬件打交道 ,以
系统调用的方式对设备文件进行操作 ,并通过完成 file
_op e ra tion s中的函数指针来把系统调用和驱动程序关
联起来 。
3. 3 注册模块
在 L inux中 ,为了使操作系统区别不同驱动程序
的标识 ,任何设备都必须有一个主设备号 。在本设计
L inux提供了一种全新的“模块 ”机制 ,可根据需 要在不必对内核进行重新编译的情况下 ,将可加载模 块动态地插入运行中的内核 ,成为内核的一个有机组 成部分 ;也可以动态地卸载已加载的模块 。
在 L inux操作系统中设备驱动程序是操作系统内 核与硬件设备之间的桥梁 ,它屏蔽了硬件的细节 (如 总线协议 、DMA 操作等 ) ,在应用程序看来硬件设备只 是一个特殊的文件 。
{ read: s3c2410_gp io_read,
write: s3c2410_gp io_w rite,
open:
s3c2410_gp io_open,
release: s3c2410_gp io_release,
ioctl:
s3c2410_gp io_ioctl,
c lo se:
s3c2410_gp io_close }。
2009年第 6期
仪 表 技 术
·13·
成部分 。对于一个特定的硬件设备来说 ,其对应的设 备驱动程序也是特定的 。 3. 1 设备驱动程序的组成
设备驱动在加载时首先需要调用入口函数 init2 module ( ) ,该函数完成设备驱动的初始化工作 ,比如寄 存器置位 、结构体赋值等一系列工作 ,其中最重要的一 个工作就是向内核注册该设备 ,字符设备调用函数 register_chrdev ( )完成注册 。注册成功后 ,该设备获得 了系统分配或向系统申请的主设备号 、自定义的次设 备号 ,并建立起与设备文件的关联 。设备驱动在卸载 时需要回收相应的资源 ,将设备的响应寄存器值复位 并从系统中注销该设备 。系统调用部分则是对设备的 操作过程 ,比如 open, read, w rite, ioctl等操作 。设备驱 动程序可以分成以下三个主要部分 。
·14·
仪 表 技 术
2009年第 6期
struct gp io_device s3c2410_gp io_dev =
{
s3c2410_GP IO _M INOR, / /次设备号
&s3c2410_gp io_fop s ,
/ /设备的 file _operations
}
由于设备驱动程序采用中断驱动 ,则可用 request
以模块化开发设备驱动程序 ,将块设备当成块序 列 ,以字节流的形式对块设备进行读写 , 需要解决的 接口函数为 file_operations结构 ,主要实现以下几个接 口函数 : open、read、w rite、ioctl等和二个加载和卸载模 块的系统函数 module_init和 module_exit。
实际上 ,全局数组 chrdevs是所有字符设备管理的 入口 ,数组的下标为具体某个字符设备的设备号 ,每个 数组元素描述了具体设备的设备驱动 。Chrdevs向量 表中的每一个条目 ,一个 device_ struct数据结构 ,包括 两个元素 :一个登记的设备驱动程序的名称的指针和 一个指向一组文件操作的指针 ,如图 2所示 。
Key words: em bedded L inux; device driver; kernel; GP IO
0 引言
2 设计思想
在嵌入式操作系统中 , L inux被广泛应用 。L inux 下设备驱动程序的编写要点是为相应的设备编写完成 相应功能的基本函数 ,然向虚拟文件系统 (VFS)注册 。 当应用程序需要对设备进行操作时 ,可以访问该设备 对应的文件节点 ,利用 VFS调用该设备的相关处理函 数即可 。
中为设备指定分配一个设备号 ,由以下语句实现 :
static int gmajor = 30; retv = register_chrdev ( gmajor, GP IO _name, &GP IO _fop s) ;
函数 register_chrdev在 < linux / fs. h >中定义 ,用
chrdev ( )函数 ,对于 s3c2410 的 GP IO 字符设备来说 ,
所用的函数是 : int gp io _ register ( struct gp io _ device 3
gp io) , gp io _ register ( ) 用主设备号 10 调用 register_
chrdev ( ) ,设备名称和函数表指针通过 gp io_device数
3. 4 注销模块
注销模块是和注册模块对应的操作 ,当卸载模块
时 ,系统将注销模块对应的设备 ,并释放主设备号 ,这
一操 作 可 以 在 模 块 的 清 除 函 数 中 调 用 unregister _
·12·
仪 表 技 术
2009年第 6期
嵌入式 L i nux中 GP IO驱动程序开发
李 涛 ,胡荣强 ,张亦敏 (武汉理工大学 自动化学院 ,湖北 武汉 430070)
摘要 : 结合嵌入式开发板 S3C2410的 GP IO 驱动程序的开发 ,对 L inux字符设备驱动程序的组成 、实现 、调试和发布方法进行了 详细地论述 。开发嵌入式 L inux下的设备驱动程序 ,可以更好地利用新硬件特性 ,提高系统访问硬件的效率 ,提供更多的功能 。
L I Tao , HU Rong2qiang , ZHANG Yi2m in
( School of Automation, W uhan University of Technology, W uhan 430070, China)
Abstract: The components, imp lementation and debugging of L inux character device drivers are discussed in detail combining w ith the development of GP IO driver on the S3C2410 embedded development board. Thus, we can take better advantage of new hardware features, imp rove the efficiency of accessing the hardware system and p rovide more func tiona lity.
3 设备驱动程序
驱动程序是指一组子程序 ,它屏蔽了底层硬件处 理细节 ,同时向上层软件提供与硬件无关的接口 ,在 L inux内核中占据极其重要的地位 ,是用来完成对物理 设备控制操作的功能模块 ,设备驱动程序控制操作系 统和硬件设备访问的交互操作 ,是操作系统的重要组
收稿日期 : 2009 - 03 作者简介 : 李涛 (1981—) ,男 ,硕士 ,研究方向为嵌入式软件开发 。
据结构获得 ;同样 , gp io_device数据结构还保存设备驱
动程序所使用的次设备号 。以下是在设备驱动程序代
码内注册 s3c2410的 gp io采用的函数调用 : gp io_ reg2
ister( &s3c2410 _ gp io _ dev) , 其中 数据 结构 s3c2410 _
gp io_dev是对 GP IO 硬件的内核访问 ,定义如下 :
(1) 自动配置和初始化子程序 。负责检测所需 驱动的硬件设备是否存在以及是否能正常工作 ,这部 分驱动程序仅在初始化时被调用一次 。
(2) 服务 I/O 就是请求子程序 ,是驱动程序的上 半部分 ,这部分是系统调用的结果 。
(3) 中断服务程序又称驱动程序的下半部分 ,设 备在 I/O 请求结束或其他状态改变时产生中断 。因为 设备驱动程序一般支持同一类型的若干个设备 ,所以 调用中断服务子程序时都带有一个或多个参数以唯一 标识请求服务的设备 。 3. 2 GP IO 驱动程序的开发流程
为设备驱动程序定义一个初始化函数 s3c2410 _
gp io_init( ) ,它在内核启动时被调用 。该函数做两项
工作 :获取设备中断和向内核注册 GP IO 字符设备 。
该函数允许设备驱动程序在设备安装时建立所需的数
据结构 。此外 ,还应向内核注册设备驱动程序接口 ,即
file _operations{ }结构 。标准字符设备使用 register_
字符设备是 L inux设备中最简单和常见的设备 , 应用程序可以调用与存取文件相同的系统来操作它 。 字符设备驱动在初始化时通过内核的 device_ struct结 构 。要根据设备功能的需要 ,编写 file_operations结构 中的操作函数 。每个设备驱动程序都对应一个 file _ operations数据结构 , file _operations是定义在 < linux / fs. h >中的函数指针数组 。对于字符设备而言 , file _ operations{ }就是唯一的函数接口 。设备驱动程序只 需要定义对自己有意义的接口函数 ,见图 1,设备驱动 模块动态挂载 、卸载和系统调用的全过程 。