基于ATmega16的气动标记控制系统设计
基于ATM_EG_A16A的远程联动控制系统原理设计
基于ATMEGA16A的远程联动控制系统原理设计*The principle design of remote linkage control system based on ATMEGA16A周 刚,胡海平 (国网嘉兴供电公司,浙江 嘉兴 314000)摘 要:为了解决各类工作过程中,涉及到两端有相互关联的工作的状态下,需要彼此配合工作,一端工作可能会影响到另一端,或者一端工作进度及情况需要告知另一端,需要远程联动,确保各项工作安全、有序、高效进行。
本文提出了基于ATMEGA16A的远程联动控制系统,通过无线传输方式,将一端的信息反馈给另一端,由另一端进行监护和反馈,确保两端联动。
关键词:运程联动;ATMEGA16A;安全0 引言在日常的工作中,经常碰到有多个点作业的情况,或者同一个工作的工作地点超过两个,或有2个及以上不同的工作单位在一起工作,不同工作点之间还需要相互配合或者某个作业点会影响到其他作业点的安全。
上述工作过程中,我们不仅需要对各个工作地点进行安全监护,而且因为存在可能需要相互协作的情况,需要跨工作点进行安全监护。
传统的工作中,工作的相互协调更多的主要使用对讲机和手机,同时,交流中人主观因素,失误也在所难免,有些工作场所,可能是学校、医院、商场、小区等,人员繁多、情况复杂。
若其中1个工作作业点负责安全措施看护的工作人员稍有分心、出现意外或违规、失职等,当缺乏安全和保护意识的外来人员突然误入安全区,甚至误碰运行设备时,后果将不堪想象。
1 系统设计为了解决上述工作中存在的安全隐患,以及进一步提高工作效率,本文提出了基于ATMEGA16A的远程联动控制系统。
系统主要由三部分组成,从左至右3个虚框内分别为信息收发控制单元、信息收发处理单元、信息感应告警单元,具体系统框图如图1所示。
信息收发控制单元主要由CPU处理模块、无线射频模块、视频无线接收显示模块以及输出控制组成。
一旦工作启动时,该单元立即向信息收发处理单元发送警告,通知对侧做好相应的安全措施,确保人员不误入危险区域。
基于ATmega16单片机的通用电机控制装置的设计

Vol.12No.7July.2010第12卷第7期2010年7月收稿日期:2010-03-05*资助项目:西南石油大学科技基金项目(2007XJZ110)。
doi:10.3969/j.issn.1563-4795.2010.07.001新特器件应用0引言电机的驱动与控制是现代电子技术中一个重要的研究课题,不同种类的电动机需要有不同的控制和驱动方法。
使用高性能单片机作为电机控制驱动装置的核心,可以有效降低电机驱动器的成本,扩展应用范围,提高使用灵活性。
ATmega16单片机是ATMEL 公司的一款高性能8位AVR 单片机,它内部带有功能强大的可编程定时和计数单元,通过编程可以很容易地产生各类交、直流电机以及步进电机的驱动波形,因此,利用这类功能强大的单片机作为电机控制器的核心,可以使控制器应用更加灵活、应用范围更广、维护成本更低。
本文设计出的电机通用控制装置功能齐全,其液晶显示装置和按键可以控制并显示电机的运行状态,而数字化的温度传感器则能有效准确地监控电机的运行温度,RS485/232总线通信接口可以将多个控制器进行联网,从而实现电机的智能化远程控制。
1电机控制及驱动电路设计图1所示是一种通用电机控制装置系统的总体结构图。
其整个单片机系统以ATmega16单片机为控制核心,其中从单片机和主单片机利用I 2C总线进行通信。
从单片机连接按键和液晶屏,可以实现人机接口的功能,这样即可以为主单片机节约宝贵的I/O 资源,又可以提高系统的运行效率。
另外,DS18B20采用单总线结构采集温度,可以实现对电机温度的监控。
1.1ATmega16主控电路ATmega16单片机具有3个PWM 功能的定时器/计数器T/C0、T/C1和T/C2,其中T/C0和T/C2是两个8位的定时器/计数器,而T/C1是16位具有输入捕获功能的定时器/计数器。
本系统的主控单片机电路如图2所示,它以mega16单片机为核心,配有外围复位电路和振荡器电路,单片机所有I/O 都可独立引出,以便与外部电路的连接和扩展。
基于ATmega16L的智能新风机控制系统设计

基于ATmega16L的智能新风机控制系统设计
张姣
【期刊名称】《现代电子技术》
【年(卷),期】2022(45)12
【摘要】冬季常见的雾霾天气严重影响人们的健康;室内装修大量使用装饰材料和复合木质家具,导致室内甲醛等有害物质的散发严重超标,造成室内空气污染,对人们身体危害较大。
为了解决上述问题,文中介绍一种基于ATmega16L的智能新风机
控制系统的设计方案。
首先进行硬件电路设计,分别对温湿度检测模块、CO;浓度检测模块、PM;浓度检测模块、触摸屏按键模块、无线收发模块RF905SE、
AT24C02外部存储器模块、电机控制电路、电源模块等进行详细介绍;其次在系统软件设计方面,给出主程序流程图及子程序设计方案。
通过检测空气中CO;浓度值、温湿度值和PM;浓度值,可实现对室内空气质量的高精度控制,并能够实时监测系统运行总时长,到达预定时间时提醒用户更新过滤网,确保室内空气质量良好。
文中系
统的设计方案和工作流程可为同类新风机控制系统的设计提供借鉴和参考。
【总页数】5页(P155-159)
【作者】张姣
【作者单位】重庆邮电大学移通学院
【正文语种】中文
【中图分类】TN876-34;TP368.1
【相关文献】
1.基于PLC的主要通风机智能控制系统设计及应用
2.基于智能逻辑模块的排风机组控制系统设计
3.基于ATmega16L单片机的温度控制系统设计
4.基于ATmega16L的电液伺服控制系统设计
5.基于ATmega16L的瓦斯监测报警系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
基于 ATmega16 单片机的微型气象探测系统设计
基于ATmega16 单片机的微型气象探测系统设计
0 引言
气候变化使得我国干旱,洪涝等自然灾害更加严重,提高我国的气象探测能力,有助于增强我国灾害预警和人工影响天气能力。
因此,气象要素测量系统开发研究具有重要的意义。
目前很多地区气象要素的测量大多依靠当地天气预报,然而天气预报地域范围较广,无法精确到小区域的气候测量。
而搭建气象台成本较高,性价比低,因此设计一种微型化,便携式的综合气象探测系统就显得十分必要。
针对以上问题本文设计了一种便携式气象探测系统,该气象检测系统可以有效地测量小区域的温度、湿度、气压、光照强度等气象参数,精度可达到普通气象测量要求,还有显示、存储、回溯查询的功能,具有低功耗、微型化、便携式、低成本的特点,适应于各种小区域的气象测量,具有一定的实用价值。
1 系统设计和工作原理
本气象测量系统以低功耗AVR 单片机ATmega16 作为核心控制部件,如图1 所示,由温度测量模块、湿度测量模块、气压测量模块、光照强度测量模块、时钟芯片、E2PROM、液晶显示和独立按键等模块组成。
通过各个传感器将温度、湿度、气压、光强度转化为电信号,利用单片机处理后得到测量数据,并在液晶上显示。
通过E2PROM 和独立按键实现数据的存储和查询。
按下存储键,储存各个测量数据和时钟芯片得到的当前时间;按下查询键,查询以前存储的测量数据。
同时该系统还具有自动测量功能,自动测量时,关闭液晶,测得数据每30 min 存入E2PROM 一次。
2 气象探测系统硬件设计。
基于AVR Atmega16的智能气体压力仪表设计

0 引言
工业现场环境的复杂性与功能需求的多元化推
动着智 能仪表 的更新 与发展 , 出于对更 新成本 、 产 品 可靠性 和稳定 性等 方 面 的考 虑 , 国 内市 场上 仍 缺 乏
一
和访 问权 限等 要 求 而 设 计有 多 款 型号 , ¥ 2 4 2 0即 属 P N 3 0气 体压力 仪表 系 列 。¥ 2 4 2 0集 气 体压 力 测量 、 功能菜 单设 置 以及压力 值 即时数字 显示等 多功 能于
I CCV7 f o r AVR. Ke y wo r d s: i n t e l l i g e n t g a s p r e s s u r e i n s t r u me n t ;s wi t c h o ut p ut ;d i a no g s t i c o u t p u t ;s wi t c h f r e qu e n c y
( 上海理工大学光电信息 与计算机工程学 院, 上海 2 0 0 0 9 3 )
摘
要 :设 计 了一款新 型智 能 气体 压 力监 测 装 置 ,不仅 实现 了对被 测 信 号 的检 测 变送 、数 字显 示、过限报警等基本功能,用户还可 自由选择过程数据或开关点。独特的电路设计,使 其能够
一
体 。另外 , 其 MC U运行 速 度快 , 稳 定性 高 , 且 内置 为 了满 足 防爆及屏 蔽外界 的 噪声 和电磁 干扰等
种 既能够 准确检 测 变送 被 测 信 号 , 同时又 能够 满
进 口精密传 感元 件 , 使 得压力 测量过 程灵 敏而 准确 。 要求 , ¥ 2 4 2 0采 用细 柱状钢 质 防爆 外壳 封 装 , 并进 行 了密 封处理 。¥ 2 4 2 0输 出可 设 定 为 4 mA一2 0 mA标 准 电流信 号或 0—5 V 电压 信 号 两 种 开 关 信 号 输 出
基于Atmega16垂直轴风力发电机电压控制系统设计
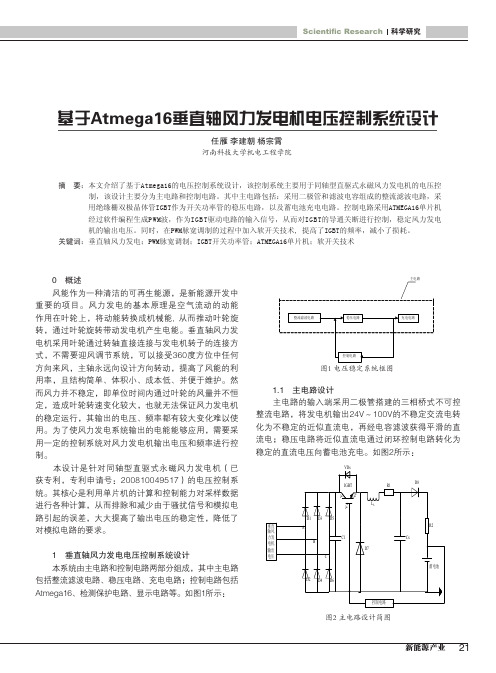
21新能源产业基于Atmega16垂直轴风力发电机电压控制系统设计任雁 李建朝 杨宗霄河南科技大学机电工程学院摘 要:本文介绍了基于Atmega16的电压控制系统设计,该控制系统主要用于同轴型直驱式永磁风力发电机的电压控 制,该设计主要分为主电路和控制电路。
其中主电路包括:采用二极管和滤波电容组成的整流滤波电路,采 用绝缘栅双极晶体管IGBT作为开关功率管的稳压电路,以及蓄电池充电电路。
控制电路采用ATMEGA16单片机 经过软件编程生成PWM波,作为IGBT驱动电路的输入信号,从而对IGBT的导通关断进行控制,稳定风力发电 机的输出电压。
同时,在PWM脉宽调制的过程中加入软开关技术, 提高了IGBT的频率,减小了损耗。
关键词:垂直轴风力发电;PWM脉宽调制;IGBT开关功率管;ATMEGA16单片机;软开关技术 0 概述 风能作为一种清洁的可再生能源,是新能源开发中重要的项目。
风力发电的基本原理是空气流动的动能作用在叶轮上,将动能转换成机械能, 从而推动叶轮旋转,通过叶轮旋转带动发电机产生电能。
垂直轴风力发电机采用叶轮通过转轴直接连接与发电机转子的连接方式,不需要迎风调节系统,可以接受360度方位中任何方向来风,主轴永远向设计方向转动,提高了风能的利用率,且结构简单、体积小、成本低、并便于维护。
然而风力并不稳定,即单位时间内通过叶轮的风量并不恒定,造成叶轮转速变化较大,也就无法保证风力发电机的稳定运行,其输出的电压、频率都有较大变化难以使用。
为了使风力发电系统输出的电能能够应用,需要采用一定的控制系统对风力发电机输出电压和频率进行控制。
本设计是针对同轴型直驱式永磁风力发电机(已获专利,专利申请号:200810049517)的电压控制系统。
其核心是利用单片机的计算和控制能力对采样数据进行各种计算,从而排除和减少由于骚扰信号和模拟电路引起的误差,大大提高了输出电压的稳定性,降低了对模拟电路的要求。
基于ATmega16的多功能焊机遥控器设计

AC ! ! V C
型 1 91 o
.芈 ( C ・ u Ol F 1 “ l
7
— —
TOS 1P 2 D6 C , C6 5
j 0
墅 ! 8
9 WlE E R K Y 8 6
—
—
一
£L EE NI
I E I
厂 l
C D o E
图 2 整 机 电 路原 理
11 单 片 机 .
A ME ( 特梅 尔) 司 的 m g T L爱 公 ea系列单 片 机是 8位 单 片 机 中 第 一 个 真 正 的 R S IC结 构 的 单 片 机 。
它 采 用 了 哈 佛 结 构 、 型 快 速 存 取 寄 存 器 组 、 速 大 快 的 单 周 期 指 令 系统 以及 单 级 流 水 线 等 先 进 技 术 , 使 得 A R 单 片 机 具 有 高 达 1 SMH V I / z的 高 速 运 行 M P 处 理能力 。 V 单片机拥有 3 A R 2个 通 用 T 作 寄 存 器 , 每 一 个 工 作 寄 存 器 都 相 当 于 8 5 系 列 单 片 机 中 的 0l 累 加 器 , 而 避 免 了在 传 统 结 构 中 累 加 器 和 寄 存 器 从
5
I D N /2 P I 0 N ’ P 3 I Jl D /
AC A L Q D/3 3 IK P BY Y E AD 4 A C/ 4 P
A C I5 2 坠 F D5 / Y
7 6 —{
9
—
£ 2l )1 I4 Q 3 CB, ( D I
1K 1 产 l9W E Y f RE
6= S [ 立 l N R _ I GD 二L T 1 C D
基于Atmega16的汽车空调系统设计与实现

以 Am g l 单片机 …为核心部件 ,设计 了一款 自 t ea6
动汽 车空调 系统 , 目前 该款 空调 控制器 已经批量 生 产 ,投 人使用 。
块改变了,也不必重新调 P WM 的输出值 ,根据当 前设置的风量等级 ,自 动调节风机两端的电压 ,使 之维持 一个稳 定 的状态 ,保证 风量 的稳定输 出。
De i n a m pl m e a i n o t m o l r sg nd I e nt to fAu o bieAi
Co d to i gS se Ba e n At e a 6 n i n n y t m s d o m g l i
GUO i o g, L h n Ⅵ Hat o i a
( p. C m u i t n E gnei , af gI tuefTcn l y N n n 117 C ia Deto o m nc i s n ier g N n n n i to eh oo , af g2 16 , hn ) f ao n i s t g i
Ab t a t h a e t d c sak n f Au o b l r n i o i g S se b s d o me a 6, s e i l t d c s sr c :T e p p r n r u e i do t mo i Ai Co d t nn y tm a e n At g l e p ca l i r u e i o e i yn o t eAu o b l rC n iin g S se S p n i l ,f n t n, a d r e i n s u t r n o t r ed v lp n o h t mo i Ai o d t i y t m’ r cp e u ci e on i o h r wa ed s t c ue a d S f g r wa e eo me t w l f r e c b d i d t i i l we d sg t t t b a ed s r e ea l F a l e i s a e np a t ea d g v er s l o s . h n t n o i Au o i n .n y n wo e s s do r c c ie t e u t f e t T e f c i f s i n h t s u o h t t-
基于ATmega16单片机的智能伞控制系统的设计

基于ATmega16单片机的智能伞控制系统的设计虞君锚;向中凡;文海鸥;方仁杰【摘要】The ATmega16 is used as the core control chip in the control system of intelligent umbrella. The control system includes wind speed sensors, light intensity sensors, rain sensors and other ancillary modules. Rain sensor collects the rainfall through the photoelec-tric conversion module, then changes it into pulse width signal. Wind speed sensor changes the wind speed into speed of pulse signal. The current of two photodiodes is integrated by the light intensity sensor at the same time, and transforms it into the digital quantity. All the signals are passed to microcontroller and analysed, the system implements the appropriate procedures of drive motor or maintains the status according to fuzzy control algorithms. Wind speed, water of rain, light intensity, and clock and other related information are displayed on the LCD. The system achieves the automated operation and management of the outdoor umbrella.%智能伞控制系统选用ATmega16单片机为核心控制芯片,集风速、光强、雨水传感器和其他辅助模块为一体;雨水传感器把采集到的雨量信号经过光电转换模块转化为脉冲宽度信号;风速传感器将风杯转速转化为电信号;光强传感器同时对流过两个光敏二极管的电流进行积分,并转换为数字量;所有的信号都传给单片机,经过微机分析,根据已经设定好的模糊算法,执行相应的驱动电机程序或保持系统状态不变,并在LCD上显示实时雨水、风速、光强和时钟等相关信息,从而实现了户外伞的自动化运行和管理.【期刊名称】《计算机测量与控制》【年(卷),期】2011(019)008【总页数】4页(P1901-1904)【关键词】ATmega16单片机;智能伞;光强;雨水;风速【作者】虞君锚;向中凡;文海鸥;方仁杰【作者单位】西华大学机械工程与自动化学院,四川成都610039;西华大学机械工程与自动化学院,四川成都610039;西华大学机械工程与自动化学院,四川成都610039;西华大学机械工程与自动化学院,四川成都610039【正文语种】中文【中图分类】TP2160 引言目前,户外伞的开和关基本上都是通过手工操作来实现,存在着很多问题:第一,由于伞体积比较大,使用很不方便,尤其当使用者需操作的伞较多时,问题更加突出。
基于ATmega16的工程车辆用空调控制系统设计
基于ATmega16的工程车辆用空调控制系统设计随着工业化的不断发展,人们的工作场所已经越来越多地涉及到了机械设备的运作。
这些机械设备往往需要极其舒适的环境来保障设备的正常运转。
现代的工程车辆作为一种高度自动化、应用较广泛的专业性车辆,其功能强大的同时,由于在使用时经常在粉尘、热尘、高温等环境因素的影响下工作,因此为了保证车辆的正常使用,车辆的工作环境非常重要。
其中,工程车辆用的空调系统设计是其中非常关键的一部分。
基于ATmega16的工程车辆用空调控制系统设计,主要是一个具有计算、控制、存储、通讯等功能的微控制器,能够对工程车辆的环境温度和空气条件进行监测,对空调设备进行控制,并实现对车载温度的控制。
整个系统的设计具有可编程性和实时性的特点,能够对车辆的工作环境进行智能控制。
系统由ATmega16微控制器、温度传感器、LCD液晶屏幕、电子风门、电子马达等组成。
在该系统设计中,温度传感器将环境的温度信息每隔一定时间采集,并由ATmega16进行处理,根据预设的温度标准进行比较,当环境温度不符合标准时,ATmega16将判定为需要进行空调启动,并通过控制电子风门、电子马达等设备,实现对空气的调节和环境温度的控制。
同时,LCD液晶屏幕能够实时显示环境温度、空调运行状态、运行时间等信息,方便车辆使用者进行监控和管理。
总的来说,基于ATmega16的工程车辆用空调控制系统设计能够很好地满足工程车辆使用过程中的环境要求,能够实现对车载温度、空气调节、环境监控等多种功能,是一种非常实用的车载控制系统。
未来,还有更多类似的设计将出现,加入更多的元素,让工程车载控制更加完善。
除了以上提到的基本功能,基于ATmega16的工程车辆用空调控制系统设计还可以结合其他传感器以及相应的控制模块,实现更为多样的控制策略。
例如,可以在系统中添加湿度传感器,根据环境湿度进行空调控制,以达到更为舒适的效果。
同时,还可以添加氧气传感器,监测车内空气质量,进行反馈控制,提高装备使用效率和安全性。
基于ATmega16的多功能焊机遥控器设计
摘要:为适应数字式多功能焊机的遥控需求,研制了一种由单片机控制的多功能焊机遥控系统,该遥控器采用ATmega16单片机、LM64128液晶显示面板,用键盘和编码器代替传统的开关和电位器,以较低的成本实现了实时、准确地完成对数字式焊机各类常用参数的调节以及对焊机运行过程进行有效监控。
解决了传统遥控器对焊机参数调节、显示不精确,可调节参数少和可重复性差的问题。
同时,该遥控器采用模块化的设计思想,具有良好的可移植性,可适用于不同控制系统的焊机。
关键词:遥控;多功能焊机;ATmega16;UART 中图分类号:TG409文献标识码:A 文章编号:1001-2303(2010)06-0027-04第40卷第6期2010年6月Vol.40No.6Jun.2010Electric Welding Machine蔡兴龙,王富林,张奕黄(北京交通大学电气工程学院,北京100044)Design of remote controller for multi-function welding machine based on ATmega16CAI Xing-long ,WANG Fu-lin ,ZHANG Yi-huang(School of Electrical Engineering ,Beijing Jiaotong University ,Beijing 100044,China)Abstract :To meet remote control requirements of the digital multi-function welding machine ,a microprocessor-controlled remote control system for multi-function welding machine is developed.This remote controller uses ATmega16and LM64128liquid crystal display panel with the keyboard and encoder instead of the traditional switch and potentiometer.It achieves real-time and accurate regulation of various commonly used welding parameters and effective machine operation monitoring ,and solves a problem of traditional remote controller that the adjustment and display of parameters is imprecise and fewer and hard to repeat.Moreover ,the controller is designed based on the thought of modular design ,and has good transplant ability.It can be used on various system.Key words :remote-control ;multi-function-welding machine ;ATmega16;UART收稿日期:2009-09-23作者简介:蔡兴龙(1986—),男,山东泗水人,在读硕士,主要从事数字式弧焊电源的研发工作0前言随着电子技术的不断发展,遥控技术在社会的各个行业得到了广泛的应用,给各种设备的远距离操作带来了很大的方便。
基于ATmega16L的PID温控系统设计

}
/ p it i rs l %h "k k n w+ d d r r ; / r f pd e ut n( — = n, pe _ o k er ) ( o) / rtr(pe _ o k err /eunk k n w+ d d r ) o; /P ot l / D c nr o rtr(pe _ 0 k★u k e rr / PD o t l eunk k n w+ i m+ d d r ) / I c nr s o; o
1 系统 概 述
1 经 过 综 合 考 虑 传 感 器 采 用 P 1 0 该 敏 感 元 件 其 在 室 温 ) tO ,
至 1 5c 围 内具 有 信 号强 、精 度 高 、稳 定 性 和 复 现 性 好 的 特 2 o范 点 。本 文 中采 用 三线 制 接 法 。Pl O t0 B铂 电 阻 接线 时 电流 回路 的 参 端 和 电 压 测 量 回路 的 参考 为一 条线 ( 即检 测 设 备 的 I端 子 和 一 V 端 子 短 接 )如 图 2 。 一 ( )
调试要点 : 先把 其 他 参 数 去 掉 , 只进 行 比例 测 节 ( )待 得 出 P, 的 温度 跟 随 曲线 基 本 无 误 后 再 加 上微 分 参 数 ( , 样 可 以减 少 d)这
超 调量 。 分 参 数 可 起 提 高 控 制精 度 的作 用 , 积 根据 系统 要 求 做 适 当调 节 。调 试 界 面 如 图 3 。
控制运算控制 P WM, 控 制 调 节 温 度 。 温 度 值 超 过 了系 统 给 定 来 的极 限安 全 温 度 , 护 电 路 会 做 出 反应 。 保
图 2
温 厦 采 集 电 路
关 于 P 10三 线 制 的 理 论公 式 如 下 : 10
基于ATmega16的气动标记控制系统

基于ATmega16的气动标记控制系统
1 引言
气动标记机广泛应用于铭牌、各种零部件及汽车大梁,但随着需求变化,对标记机的稳定性、便携性、多任务性提出了更高要求。
标记软件由以前的DOS系统升级到Win98、Win2000,WinXP等版本,功能越来越复杂,然而,硬件设计几乎没有变化。
由于普通标记机控制系统的标记专用软件将图形信息转化为脉冲信息后需通过I/O接口(ISA、PC扩展卡或并口)输出至驱动控制板,然后再由驱动电路执行机构工作。
但目前大多数个人PC机、笔记本电脑都取消并口、串
口配置的扩展I/O卡,而使用IJSB接口。
普通标记机的PWM信号采用555振荡器和多个阻容元件构成一个无稳态的占空比和频率均可调的多谐振荡器,当调整PWM信号时,打开控制箱,则通过调节两只可调电阻调整PWM信
号的频率和占空比。
为了解决上述标记机控制系统存在的缺点,采用单片机ATmegal6和USB转换RS232接口器件CH341T组成通信接口,标记控制系统升级到USB接口:采用ATmegal6的相频修正PWM替换555振荡电路,。
基于ATmega16L的电液伺服控制系统设计

基于ATmega16L的电液伺服控制系统设计摘要:针对电液伺服闭环控制过程中,设定信号不断发生变化,电液阀门位置定位精确度较低的难题。
采用ATmega16L 作为核心控制器,并配有高精度A/D、D/A 转换器,通过对阀门开度控制信号和位置反馈信号进行采集、转换、计算和比较,发出控制信号决定并执行换向阀的换向、交流伺服电动机的起停运转,推动液压缸推杆的伸缩,进而对阀门转角大小、开度百分比进行精确定位。
关键词:单片机微处理器;伺服控制;阀门位置;RS 485 通信0 引言随着电力电子技术、电机控制技术、计算机技术和传感器技术的发展,交流伺服控制技术已逐步取代了传统的直流控制技术,越来越多地应用到各种工业控制领域中。
现代制造行业的迅速崛起,对伺服控制系统的控制性能提出了更高的要求。
要求提高伺服系统的移动速度、跟随精度和定位精度。
而提高伺服控制系统的动态性能主要有以下两个途径:一是采用高性能的伺服电动机和测量装置,提高伺服控制系统的硬件性能;二是采用新的控制策略,提高软件系统的性能。
本设计采用了性价比较高的单片机控制器取代传统的运算放大器实现信号的处理,智能控制器具有很强的数据采集、处理、记忆、存储及通信等功能,具有较高的精度、较好的人机界面和故障诊断能力。
1 电液伺服控制系统的硬件设计硬件电路由ATmega16L 控制器及其最小系统、信号检测模块、PWM 输出缓冲模块、驱动电路、RS 485 通信模块、液晶显示及按键模块组成。
其中,ATmega16L 控制器最小系统包括单片机复位电路、电源配置电路、时钟电路等。
图1 为控制器硬件组成结构框图。
1.1 ATmega16L 控制器及其最小系统电路设计本系统给定阀门开度指令信号,通过检测位置和转速信号形成闭环系统,输出PWM 控制信号,通过驱动。
利用ATmega16L设计的温度控制系统

利用ATmega16L设计的温度控制系统
概述:一种基于ATmega16L 单片机的温度控制系统,阐述该系统的软硬件设计方案。
采用模块化设计方法,利用增量式PID 算法使被控对象的温度值趋于给定值。
实验结果表明该系统具有良好的检测和控制功能。
1 引言
随着科学技术的进步,检测行业发展快速,除了检测项目和内容不断扩大,更重要的是检测愈来愈科学化、职能化,主要表现在检测过程及检测结果由计算机监控和显示。
多点温度的采集控制近年来在检测行业应用较为广泛,其中以微机为核心的监控技术价格低廉,使用方便,应用也最普遍。
本文主要介绍基于ATmega16L 单片机的温度控制系统的设计,具体包括炉温的采集和控制、LCD 显示以及PC 机绘制温度变化的曲线2 系统的硬件设计
2.1 主控制器
系统主控制器采用ATmega16L,该单片机是一款高性能、低功耗的8 位AVR 微处理器,具有先进的RISC 结构,内部有大容量的
ROM、RAM、FLASH 和EEPROM,集成4 通道PWM,SPI 串行外设接口,同时具有8 路10 位A/D 转换器,对于数据采集系统而言,外部无需单独的
A/D 转换器,从而可节省成本。
另外,该单片机提供JTAG 调试接口,可采用自制的简易JTAG 仿真器进行程序调试。
2.2 温度采集电路
2.3 温度控制电路
该电路主要由光电耦合器和可控硅组成,如2.4 其他电路
(1)显示电路系统的模块较多,I/0 接口紧张,显示器选用液晶显示器。
基于ATmega16的智能小车控制系统设计

基于ATmega16的智能小车控制系统设计陈谨女;田浩【期刊名称】《物联网技术》【年(卷),期】2013(3)4【摘要】当前的电动小车基本上采取的是基于纯硬件电路的一种开环控制方法,具有直线行驶、前进、后退、转弯、停车等基本功能,但在某些特殊场合下却不能采集到有用信息。
文章正是在这种需要之下,以ATmega16单片机为控制核心,用RF2401无线收发模块进行遥控通信,用DS18B20进行温度检测,同时采用超声波等传感器材检测信号和障碍物,最后充分利用单片机的串口资源和运算、处理能力,开发设计了一种智能控制系统,从而实现了小车的测温、躲避障碍物等功能。
%The electric car which has basic functions such as straight driving, going forward and backward, turning and parking, basically took open-loop control method based on hardware-only circuit in the current, but it can’t collect useful information on special occasion. The paper gave a design of an intelligent control system took the ATmega16 microcontroller as the control core, use RF2401 wireless transceiver module to remote communication, took DS18B20 sensors as temperature detector, use ultrasonic for detecting signal and obstacle and make full use of serial port resources and computing processing ability of microcontroller. Finally the functions of temperature measurement and evading obstacles are realized.【总页数】3页(P73-75)【作者】陈谨女;田浩【作者单位】长安大学电子与控制工程学院,陕西西安 710064;长安大学电子与控制工程学院,陕西西安 710064【正文语种】中文【中图分类】TP242.6【相关文献】1.基于Arduino控制板的数据采集智能小车的控制系统设计与实现 [J], 王尊冉;庞俊腾;陈均健;裴宇;杜启亮2.基于手绘控制的智能小车控制系统设计 [J], 左加伟;刘长荣3.基于蓝牙控制技术的智能小车控制系统设计 [J], 温芮; 陈锦鸿; 王丽4.基于Atmega168PA-AU的消防飞行器控制系统设计 [J], 周雨峰; 唐龙; 胡远望5.基于ATMega16单片机的体操机器人控制系统设计 [J], 汪倩倩;汤煊琳因版权原因,仅展示原文概要,查看原文内容请购买。
基于ATMEGA16的智能控制器的开发研制

基于ATMEGA16的智能控制器的开发研制
张春峰;邹新杰;余张国
【期刊名称】《微计算机信息》
【年(卷),期】2007(000)03Z
【摘要】简单介绍智能仪表原理,阐述了适用于温度、液位等的测量控制的智能仪表的硬件和软件的设计。
所设计的AT-MEGA16智能控制仪表具有优良的性价比,实际应用表明该仪表具有稳定性好、精度高和抗干扰能力强等特点。
【总页数】3页(P124-125,141)
【作者】张春峰;邹新杰;余张国
【作者单位】四川绵阳西南科技大学信息工程学院,621010
【正文语种】中文
【中图分类】TP216
【相关文献】
1.基于ATMEGA16的电热锅炉温度控制器的开发研制 [J], 张春峰;邹新杰;余张国
2.基于ATMEGA16的智能控制器的开发研制 [J], 张春峰;邹新杰;余张国
3.基于ATmega16单片机的电流互感器二次防开路系统设计 [J], 刘罡; 田奎; 姜春阳
4.基于ATMEGA16L-8PL单片机的线阵LED图文显示 [J], 吴琎
5.基于ATmega16芯片的车用倒车测距系统设计 [J], 隋美丽;刘敏杰;成林;王谷娜因版权原因,仅展示原文概要,查看原文内容请购买。
基于ATmega16的机器人遥控器设计

基于ATmega16的机器人遥控器设计韩庆瑶;廖安文;徐瑾;洪草根【期刊名称】《计算机技术与发展》【年(卷),期】2011(021)003【摘要】为了实现对机器人的实时控制,要求遥控器与机器人主控制器之问高效稳定的通信.其中遥控器的设计是至关重要的一部分.文中的遥控器利用通用的普通游戏手柄进行改装,用ATmega16单片机作为主控芯片,实现开关量和模拟量的检测以及A/D转换.这种改装后的遥控器外形上与普通游戏手柄没有区别,但其按键功能将完全适应机器人操控.实验证明,应用这种改装的手动机器人遥控器具有灵活性高,成本低廉,开发周期短,方法简单的特点.%In order to control the robot in real-time, it demands an effective and steady communication between the remote control and the main controller. The design of the remote control is a vital part. In this paper, the remote control is modified by a common game handle. The single chip microcomputer of ATmega16 is used to achieve the detection of switching and analog capacity. The modified remote control is no difference in appearance comparing with the common game handle, but the key features could completely meet the demand of the robot control. Experimental results show that the modified remote control has high flexibility, low cost, short development cycle and simple.【总页数】4页(P246-249)【作者】韩庆瑶;廖安文;徐瑾;洪草根【作者单位】华北电力大学,机械工程系,河北,保定,071003;华北电力大学,机械工程系,河北,保定,071003;华北电力大学,机械工程系,河北,保定,071003;华北电力大学,机械工程系,河北,保定,071003【正文语种】中文【中图分类】TP391.3【相关文献】1.基于ATmega16的多功能焊机遥控器设计 [J], 蔡兴龙;王富林;张奕黄2.基于ATmega16的万能型遥控器设计 [J], 韦禄民;卢丹萍;卢勇威3.基于Atmega16v单片机控制的智能物流机器人设计 [J], 张玉荣;李戴4.基于ATMega16单片机的体操机器人控制系统设计 [J], 汪倩倩;汤煊琳5.基于ATMega16单片机的体操机器人控制系统设计 [J], 汪倩倩;汤煊琳因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机的步进间隔时间是离散的,速度控制实质是控制步进电机产生步进间隔时间,使步进电机按给定的速度工作。若Ti为相邻两次走步间的时间间隔(秒),Vi为进给一步后的末速度(步/秒),a为下一步加速度。则利用等式,计算相邻两步问的时间间隔。由于计算比较繁琐,因此,一般不采用在线计算控制速度,而是采用离线计算求得各个Ti,通过延时时间表把Ti编人程序中,然后按照表地址依次取出下一步进给的值,通过延时程序或定时器产生给定的时间间隔,发出相应的走步命令即可计算相邻两步问的时间间隔。图4为该标记控制系统的软件流程。
基于ATபைடு நூலகம்ega16的气动标记控制系统设计
1 引言 气动标记机广泛应用于铭牌、各种零部件及汽车大梁,但随着需求变化,对标记机的稳定性、便携性、多任务性提出了更高要求。标记软件由以前的DOS系统升级到Win98、Win2000,WinXP等版本,功能越来越复杂,然而,硬件设计几乎没有变化。 由于普通标记机控制系统的标记专用软件将图形信息转化为脉冲信息后需通过I/O接口(ISA、PC扩展卡或并口)输出至驱动控制板,然后再由驱动电路执行机构工作。但目前大多数个人PC机、笔记本电脑都取消并口、串口配置的扩展I/O卡,而使用IJSB接口。普通标记机的PWM信号采用555振荡器和多个阻容元件构成一个无稳态的占空比和频率均可调的多谐振荡器,当调整PWM信号时,打开控制箱,则通过调节两只可调电阻调整PWM信号的频率和占空比。为了解决上述标记机控制系统存在的缺点,采用单片机ATmegal6和USB转换RS232接口器件CH341T组成通信接口,标记控制系统升级到USB接口:采用ATmegal6的相频修正PWM替换555振荡电路,可直接通过PC软件修正PWM信号的频率和占空比,使得PWM信号调整便捷。2 ATmegal6相位与频率修正PWM模式 ATmegal6相位与频率修正PWM模式是一种频率与占空比精确的PWM信号。采用固定TOP值的工作模式,即16种PWM波形产生模式的模式8,简称相频修正PWM模式。 相频修正PWM模式基于双斜坡操作,其工作时序。TCNTn重复从BOTTOM计数到TOP,然后又从TOP返回至BOTTOM。在一般比较输出模式下,当TCNTn向TOP计数时,若TCNTn与OCRlx相匹配,OClx清零,并置为低电平;当TCNTn向BOTTOM计数时,若TCNTn与OCRlx相匹配,OC1x置为高电平,工作于反向输出比较时正好相反。比较单元在OClx引脚输出PWM波形,其输出PWM的频率变量N是分频因子(1、8、64、256或1024);变量fclk为CPU时钟;变量TOP是计数器最大值。如果PwM工作频率已知,则当TOP确定后,调整OCRlx值。即调整占空比来获得所需的PWM波形。采用固定TOP值工作模式时,建议使用ICRl寄存器定义TOP,这样OCRlA就可采用OC1A输出的PWM(共用相同4气动标记机控制系统软件设计采用改进后的标记机控制系统的软件设计分为安装在PC上的人机交互界面和烧写ATmegal6的实时控制软件。其前者负责把图形信息转换成脉冲信息及设置标记机运动相关参数,如速度、PWM频率和占空比等;后者负责接收PC发送的信息,并进行相关处理,再将当前硬件信息返回到PC。传输的信息分为两大类:一类是带固定信息头和固定信息尾的普通数据帧;另一类是无信息头和无信息尾的脉冲数据帧信号。这样可以大大减少在标记过程中的数据发送量,降低ATmegal6在实时标记过程中断脉冲输出任务处理接收串口数据的次数,使得执行机构运动更流畅。有信息头和信息尾的数据帧结构为:表1所示的主任务数据帧结构和表2所示的次任务数据帧结构。表2中的参数信息的字节个数是根据次任务识别信息区分是否带参数或带参数的字符个数。
ATmegal6的基准时钟采用11.059 2 MHz无源晶体振荡器。串口通讯协议为波特率19 200 bit/s,8位数据位,1位停止位,无奇偶校验位。驱动器使用M542型(64细分),57BYG步进电机。最大标记幅面满足260 mm×260 mm,数字/字母(4 mm高)的刻写速度3-6个/秒。该系统适用于平面、旋转、平面一旋转混合式标记。5 结语 基于ATmegal6和CH341T改进的标记机控制系统大大缓解PC机的工作负担;应用基于ATmegal6的相频修正PWM模式,可通过软件调整高频电磁阀所需的PWM信号;使用TIPl22三极管替换直流继电器后,驱动电路更简便和便宜。标记控制软件从原来常用的并口模式或插扩展卡的模式升级到USB模式,适合于台式PC机和笔记本电脑.现已实现多标记头在一台PC机控制下的异步工作。