ICND110S01L06-Exploring the Packet Delivery Process
富士施乐S2010_S1810维修手册_1-3章
实施维护作业时,应注意以下事项,避免执行错误及不必要的作业。来自维修手册 Ver.1.0
发行:2012 年 5 月
• 本维修手册用于下列产品: 富士施乐(有限公司) • DocuCentre S2010/S1810
• 关于维修手册的机密性 • 本维修手册仅限于富士施乐认 可的产品维护保养人员使用,严 禁未经许可而复印、转载、供他 人阅读或提供给他人。 • 因修订等原因而不再需要时,请 务必烧毁或用碎纸机进行处理。 • 使用时请注意,应将手册保管 好,避免遗失、破损。
Version 1.0
DC S2010/S1810
2012/05 1-3
1.1 作业前的注意事项
维修要领
维修要领
1.1 作业前的注意事项 1.1.2 处理客户信息时的注意事项
2012/05 1-4
1.1.3 其他注意事项
DC S2010/S1810
Version 1.0
1. 复印 / 打印 ( 纸张信息 ) 或记录文件 ( 通讯管理报告等 ) 等客户电子信息的处理。 以调查 / 分析为目的需带回样本时, 请务必获得客户的许可。 另外, 必须告知客户绝不会 有其他用途。 客户要求提交带出申请书时, 应使用 [FX 信息安全规定 : 附件 15 机密信息 / 个人信息管理表 (IS-019)], 或依照客户指示, 以书面方式取得客户的认可。
0.2 手册的使用方法
本手册记载了对本产品进行维护保养时的标准作业。有关访问时执行的作业,应依照 “第 1 章 维修要领”有效执行。
有关选装品的详情,应参照选装品的维修手册。
2.1 手册的构成 本手册共分为 10 章,以下对各章进行说明。
· 第 1 章 维修要领 本章记载了执行本产品的保养维修的全面步骤及维修方法。
Oracle10g中安装Perl环境所产生冲突
从官网下载完Active Perl5.10安装完后,写了很简单的Perl脚本,仅引用了一个文件拷贝模块,调用Perl解释器来运行程序的时候,报了一堆错,先是一个弹出框提示‘无法启动此程序,计算机丢失Perl58.dll’,点击确定后报出错误信息:Can't load'D:\oracle\product\10.2.0\db_1\perl\5.8.3\lib/MSWin32-x86-multi-thread/auto/File/Glob/Glob.dll' for module File::Glob: load_file:找不到指定的模块。
a tD:\oracle\product\10.2.0\db_1\perl\5.8.3\lib/MSWin32-x86-multi-thread/XSLoader .pm line 68.从上述信息很明显,应该是早前安装的Oracle与新装的Perl冲突了,而且冲突是因为Oracle在安装的时候往我们系统中添加了一个Perl5Lib的环境变量,而这个环境变量指向的则是Oracle安装目录下那个模块不全的Perl,从信息提示可以知道为Oracle Home/perl目录。
知道了错误原因,那么改的方法就多了去了:1、经常与Oracle打交道而偶尔玩下perl的一类朋友:如果是这样的话,建议就不要对环境变量Perl5Lib动手了。
在运行Perl命令之前,设置下当前命令行窗口的临时Perl5Lib变量就可以了。
如笔者的Perl10安装在G盘根目录下,则在运行Cmd后,使用命令Set Perl5Lib="G:\\Perl\bin\"改变下环境变量Perl5Lib的指向,该命令作用域为Session级的,即重开Cmd 后还得再次设置。
2、与上述情况相反的:可以先备份下Per5lLib的内容,然后将Perl5Lib清空或者设置为G:\\Perl\Lib即OK3、两者都经常打交道的:将G:\\Perl\Bin加到Perl5Lib的前面,注意,不是替换。
CVIPC2000 manual 马头 工具 软件 手册

6159932082-05English1 / 38CP Georges Renault - ZAC de la Lorie - 38 Rue Bobby SandsBP 10273 - 44818 Saint-Herblain Cedex - France©© Copyright 2009,All rights reserved. Any unauthorized use or copying of the contents or part thereof is prohibited. This applies in particular to trademarks, model denominations, part numbers and drawings. Use only authorized parts. Any damage or malfunction caused by the use of unauthorised parts is not covered by Warranty or Product Liability.CVIPC2000 Release 3.8.1 and higherOperator’s manual N° 6159932082-056159932082-05English2 / 38Warning.With a view to constantly improving its products, Desoutter reserves the right to introduce all the changes as it may deem necessary to the products described herein, without prior notice.This document contains a section in French language (original version) and sections in foreign languages which correspond to its translation. Should any dispute arise, the French section shall be deemed authentic.This document includes important notes relating to safety. These are mentioned as follows:This document also includes essential instructions to use the product, as well as general information. These are mentioned as follows:Safety noteEssential instructionGeneral information6159932082-05English3 / 38TABLE OF CONTENTSWarning (2)1 - INTRODUCTION (5)1.1 - Transfer mode and Command mode (5)1.2 - Point-to-point connection and multipoint connection (5)1.3 - Installation (5)1.3.1 - Hardware and software requirements (5)1.3.2 - CVIPC software protection (5)1.3.3 - Installation (6)1.3.4 - Upgrading the controller software (6)1.3.5 - Upgrading the CVIPC software (6)1.3.6 - Uninstalling (6)1.4 - Initiating the Program (7)2 - CREATING A STATION (8)2.1 - Creation (8)2.2 - Copying a station (11)2.3 - Deleting a Station (11)3 - PARAMETERS (12)3.1 - Controller (12)3.1.1 - Serial ports RSA and RSB (12)3.1.2 - Ethernet Link (13)3.1.3 - Peripherals (13)3.2 - Notepad (15)3.3 - Spindles (15)3.4 - Cycles (16)3.4.1 - Add a cycle (18)3.4.2 - Add a phase (18)3.4.3 - Delete (18)3.4.4 - Copy (18)3.4.5 - Paste (18)3.4.6 - Cycle parameters (18)3.4.7 - Phase parameters (18)3.4.8 - Phase Type (18)3.4.9 - Instructions (19)3.4.9.1 - Search Sequence Phase (19)3.4.9.2 - Run Down Speed Phase (19)3.4.9.3 - Final Speed Phase (20)3.4.9.4 - Run Reverse Phase (21)3.4.9.5 - Action on NOK phase (21)3.4.9.6 - Prevailing torque phase (22)3.4.9.7 - Synchro waiting phase (not available on CVIS) (22)3.4.9.8 - Jump phase (23)3.4.9.9 - Angle rundown phase (for CVIC only) (23)3.4.9.10 - List of spindles (23)3.5 - Curves (23)4 - RESULTS (24)4.1 - Tightening (24)4.1.1 - Display (24)4.1.2 - Printing (24)4.1.2.1 - Detailed report codes in PC4 format (25)4.1.2.2 - Detailed binary report codes in 32 bits (0 or 1) (26)4.1.3 - Specific format (26)4.1.4 - Archiving and erasing (27)4.2 - Curves (curve display) (27)4.3 - Statistics (28)4.3.1 - General (28)4.3.2 - Values (28)6159932082-05English4 / 384.3.3 - Statistics (29)5 - MAINTENANCE (30)6 - DATA TRANSFER (31)6.1 - PC --> Station (31)6.2 - Station --> PC (31)6.3 - Station - PC comparison (31)6.4 - CVINet Data Collector (31)6.5 - ToolsNet Data Collector (31)6.6 - Automatic transfer of results (31)6.7 - Grafcet (31)6.8 - Channel test (31)7 - PRINTING (32)7.1 - Station Parameters (32)7.2 - List of Stations (32)8 - SERVICES (33)8.1 - Access Code (33)8.2 - Registration Code (33)8.3 - PC Communications (33)8.4 - Automatic uploading / Backup (34)8.5 - General parameters (35)8.6 - PC Language (35)8.7 - Printer Setup (35)8.8 - Number of curves (35)8.9 - File Management (35)8.10 - Manage privileges (35)8.11 - Manage your login (35)9 - COMMAND MODE (36)9.1 - Control window (36)9.2 - Test window (37)Spindle start (38)Cycle (38)Sensitivity (38)Inputs/Outputs (38)6159932082-05English 5 / 38INTRODUCTION1 - INTRODUCTION This manual explains how to use the CVI range software: CVIPC 2000.The CVIPC software can be used with all the control systems of the CVI series (TWINCVI, MODCVI, CVIS, MULTICVI, CVIC and MULTICVIC controllers).It offers a complement to the use of the controller(s) and allows the user to:•program the cycles and then upload them to the controllers•process the tightening results in the form of curves and statistical calculations•increase the memory capacity to save the results and curves•save the parameters and results•transfer data to a spreadsheet for subsequent analysisThe additional advantage offered by the Advanced CVIPC 2000 software is that it can control up to 16 networked controllers in real time (in command mode).The software can be equally operated in Windows XP or Windows Vista.1.1 - Transfer mode and Command modeThe software can operate in two modes: the Transfer mode and the Command mode.The first mode allows the operator to upload the parameters from the PC to the controller or to download data from the controller to the PC while the second mode is used to monitor the controller in real time.1.2 - Point-to-point connection and multipoint connectionTwo types of connection are available between the PC and the controller:•the point-to-point connection is a connection between the PC and a single controller•the multipoint connection allows the user to connect several controllers at the same time.Each mode (Transfer/Command) can be used with each type of connection. The standard use is the point-to-point connection.The multipoint connection requires a specific configuration of the addresses of the controllers (the network address should be specific of each controller).The CVI can be connected to the PC via an Ethernet gateway or an integrated Ethernet link (TWINCVI). In that case, each station has a network address which must correspond to the IP address of the CVI. See section 3 - “PARAMETERS”.1.3 - Installation1.3.1 - Hardware and software requirementsThe computer should be of PC type and have at least one serial port or an Ethernet connection.1.3.2 - CVIPC software protectionThe software is protected by a registering code. As long as this code has not been entered, the software is run in Demo mode This software version is limited to 90 days' operation.By or before the end of the 90-day evaluation period, you must request your registering code to be allowed to continue using the software.To do so, a standardised registering form is available. This form is available when starting the program or by clicking on the See Info button or through the Services / Registering code menu. Copy the form into an email, complete it and send it to Desoutter atthe address: tightening.support@.The link is of the following type:RS232 for a point- to-point link between the PC and a controllerRS422 for a network of several controllers.The standard CVIPC software is used for the point-to-point connection of a single controller.The CVIS/CVICPC software is used for the point-to-point connection of a single CVIS/ CVIC controller.The Advanced CVIPC software is used for the multipoint connection of 16 controllers.Each time the software is run, a message that indicates the number of remaining days before the evaluation is dis-played. When the period has elapsed, a warning message is displayed: "You are not allowed to run this software!".To know which software type and version is installed, click on menu ? / About... .6159932082-05English6 / 38INTRODUCTION1.3.3 - InstallationUse the CD to install the software. Open the Install file, then Disk1and double-click on Setup.exe.Select the path for installing the software (by default C:\Georges Renault\CVIPC 2000) and follow the instructions on the screen.1.3.4 - Upgrading the controller softwareUpgrading the controller software will involve a loss of previously saved data (cycle parameters, tightening results). To avoid this, it is recommended to download all data from the controller to the PC before upgrading.1.3.5 - Upgrading the CVIPC softwareThe upgrading software allows you to upgrade the CVIPC (licensed) software. Please contact our departments.1.3.6 - UninstallingIt is very important to take note of your uninstalling code to be able to reinstall the software on another PC. This uninstalling code MUST be provided to the technical assistance department with the public key to obtain a new private key for installing the soft-ware on another PC.If you wish to install CVIPC 2000 in Windows XP / Windows Vista, you must use an administrator's account.Using the Windows shortcuts, you can start the CVIPC 2000 in different directories, which allows you to define sev-eral station sites.In Windows XP / Windows Vista, you do not need to use an administrator's account for a simple upgrade.To uninstall CVIPC 2000 in Windows XP / Windows Vista, you must use an administrator's account.To uninstall CVIPC 2000:1 - Start Menu / Programs (or All the programs) / CVIPC 2000 / Uninstall CVIPC 2000 or- Workstation / Configuration panel / Add/Delete programs / CVIPC 2000 / Modify/Delete button2Confirm the uninstallation by clicking on the Yes button in the Confirm File Deletion window to validate.3Take note of your uninstalling code!To install CVIPC 2000 on another PC:1Install CVIPC2000 on the new computer2- Copy the registering form displayed on the screen - Paste it into an email 3Complete the registering form (in the email):- New public code (given automatically)- CDRom serial number (YYxxxxx 5xx0Vx.x)- Company, city- Contact details (name, email, telephone and fax number).4Also enter (COMPULSORY):- Uninstalling code (that you noted when uninstalling)5Send the email with the completed form to: tightening.support@6You will receive your registering code in return7Services / Registering code:- Enter the received registering code- Click on Save6159932082-05English7 / 38INTRODUCTION1.4 - Initiating the ProgramClick on the Start menu in the Windows task bar, point the mouse to Programs or All the programmes and select the CVIPC2000 program in the list. Click on CVIPC2000 to start.CVIPC 2000 accepts optional arguments, and in particular:Other arguments are available after clicking on menu ?, then on About..., and finally on thebutton.-COMM->starts the software in Command mode-A->starts the software directly in the Control screen6159932082-05English8 / 38CREATING A STATION2 - CREATING A STATIONThis menu is used to create a station.A station can include one or several spindles belonging to a controller.A station can include several spindles belonging to synchronised controllers of the same type.2.1 - CreationIn the CVIPC menu bar, click on Station and Create (using the keyboard, press Alt A then R) or click on thebutton. Select the type of controller in the drop-down menu and click on OK to validate.TWINCVICVIC6159932082-05CREATING A STATIONEnglish9 / 38Station name Enter the station name (11 characters as a maximum). The name of the station isused as the name of its data directory. As a result, the following characters are notallowed: \ / : * ? " “ |Comment Enter a comment to describe the station (25 characters as a max.)Number of spindles1-32Station number 1-2 (a synchronous TWINCVI includes only one station and its number is 1)Unit Nm / ft.lb / in.lb / kgm / kgcmSource of the cycle number Peripheral used to select the current cycle: keyboard, Input/Output, PC, PLC, barcodeSpindle validation Operation enabled or not enabled by the PLCAutotest cycle number0 invalidates the autotest. Refer to the Cycle Programming section in the technicalmanual of your controller.Pulse RP durationA value different from 0 allows you to program pulse reports (Accept, Reject)(0.1to 4.0s) at end of cycleResult type Reject / Accept / AllMode Normal / ECPHTYellow LED modeOutput According to the configuration: Free / Ready / In cycle / RP NOK / RP OK / NCYCOK / Cycle 1 / Cycle 2 / Cycle 4 / Synchro out / Cycle 8 / Torque OK / Torque NOK/ Angle OK / Angle NOKInverse Yes / NoFlashing Yes / NoRun reverse parametersRun reverse speed0 - 100%. This speed is used for all reverse running (save for the run reverse phasein a cycle)Min. torque (Run Reverse)Minimum torque required to detect a real untightening of the assembly.Min. angle (Run Reverse)Minimum angle required to detect a real untightening of the assembly. Maximum time (Run Reverse)Maximum run reverse duration (when equal to 0, reverse running is continuous). OptionsReport acknowledgement This option is used to forbid the start of the spindle as long as the RP Request inputis not validated.Error acknowledgement Validates or not the Error Acknowledgement mode after a reject report.Scy pulse The Start Cycle signal can be activated with a pulse.Run reject spindles When this mode is enabled, the system runs only the spindles with a reject reportfrom the previous cycle. A Reset command must be sent to start all the spindles. Lock on NCYCOK When this function is enabled, the Start Cycle is locked by the system as soon as thenumber of cycles run with an accept report has reached the programmed NCYCOK.A reset command must be sent to unlock the cycle start.Spindle validation at run reverse This function is used to validate or not the run reverse operation through an externalcontrol system (Inputs/Outputs).AZC and unbalance test on SCY Using this option, you no longer need to run the zero correction and torqueunbalance tests when the cycle starts, which is particularly useful for the spindleswhich are already subjected to stress when the cycle starts.Reject Report on SCY stop This mode allows you to prevent the Reject Report signal from being sentsystematically each time the Start Cycle signal drops during the cycle.6159932082-05English10 / 38CREATING A STATIONThe following paragraph only applies to the CVIS and CVIC.Press Input/Output to select the signals (functions) to be assigned to the inputs and outputs.Press OK to validate.After creating and configuring your station(s), select the station that you want to use. The name of the station is displayed in thetop left-hand corner of the screen.Reject report on time out If this option is ticked, a Reject RP is generated when a cycle finishes with a TimeOut. This is used to solve applications when the torque and the angle are insidetolerances and yet the tightening is NOK (ex: the screw is damaged just before thetorque is reached).Current monitoring Yes / No. This mode allows you to monitor the value of the motor current (I) at endof cycle. The I min and I max tolerances are programmed in a tightening phase ofthe Torque or Torque + angle type.Coefficients per cycle Yes / No. If the answer is yes, sensitivity coefficients can be defined for each cycle.They are modified by performing the calibration procedure in Test mode.Reverse one shot As soon as the tool has run reverse once, it automatically returns into tighteningmode.Double press reverse The reverse button must be double pressed in order to activate or to inactivate therun reverse mode.Lock cycle 0(On CVIC-M and H only) Yes / No. Allows you to inhibit cycle 0.Push Start(On CVIC only) Yes/ No. Allows you to use the Push Start command of an ECLtool. If you have several controllers connected to the same PC, you must also enter the Address controller parame-ter.StationTo define the main parameters of the station ControllerTo define the controller parameters NotepadIt can be used to enter any type of data specific of the selected station (configuration / maintenance data, etc.).SpindlesTo define the spindle parameters CyclesTo define the station cycle parameters (cycle: sequencing of phases to perform a tightening task)Curves To define the parameters for saving the curves.6159932082-05English11 / 38CREATING A STATION2.2 - Copying a stationClick on the station with the parameters you wish to copy.In the CVIPC menu bar, click on Station, then on Copy or on the button.You will access to the Main Parameters panel of the station. Complete all the fields in the panel (see section 2.1 - “Creation”).2.3 - Deleting a StationClick on the station that you want to delete.In the CVIPC menu bar, click on Station, the on Delete or on.Validate your option or not.Tightening To display the tightening resultsCurve plotting To display the tightening curves.Statistics To display the statistics.Maintenance This function allows the maintenance technician to know the number of cycles run per tool and controller, the version number of the controller software and the communications protocolnumber.Transfer Station->PC / PC->station transfer.When changing the operating mode of a TWINCVI from synchronous to asynchronous (by changing the number of spindles of the station from 2 to 1), the second (associated) station is automatically created and is an identical copy of the first one.6159932082-05English 12 / 38PARAMETERS3 - PARAMETERS3.1 - Controller3.1.1 - Serial ports RSA and RSBThe serial ports are used to communicate with external peripherals (PLC, printer, etc)TWINCVICVICAddressController address from 0 to 253Controller language Select the language used by the controller in the drop-down menu.Controller date formatSelect the date format: Day/Month/Year Month/Day/Year Year/Month/DayMains voltage 115 or 230 V (for Ergostop function - see TWINCVI documentation)Serial ports To define the parameters of the link(s) between the controller and the peripheral associated to each port.Peripherals To set up the peripherals associated to each port.Print at cycle endClick on this button to print the result at end of cycle on the controller printer. This screen shall also be used to select the format and type of results to be printed (All / OK / NOK).EthernetTo define the parameters of the available sockets (ports).RSA portAssociated peripheral None / PC IsaGraf / RP Output / Bar code 1 / Bar code 2Link type RS232 (by default)Baud rate 300-9,600 Bd Data bits 7-8Stop bits 1Parity None / Even / OddRSB portAssociated peripheral None / PC IsaGraf / RP Output / Bar code 1 / Bar code 2Link type RS232 / RS485i / RS485f / 4-20mA Baud rate 300 -115,200 Bd Data bits 7-8Stop bits 1-2ParityNone / Even / Odd6159932082-05English 13 / 38PARAMETERS3.1.2 - Ethernet LinkClick on the Ethernet button. The Ethernet field (Ethernet link / No) indicates if the unit includes an Ethernet link (in display mode only).Click on the Ethernet link button to access the Ethernet.ini file, which allows to describe the networked units (see explanation in the Ethernet technical manual). In some cases, the Sockets tab may be available:For details about the configuration of an Ethernet link, refer to the Ethernet technical manual.3.1.3 - PeripheralsAssociated function Socket 1Unused / Transfer PCAssociated function Socket 2Unused / Report output / CVINet Data Collector / ToolsNet Data Collector Associated function Socket 3Unused / Modbus TCP / Isagraf PC / Open Protocol / Com Box Port port no. for the selected associated function Distant IPxxx.xxx.xxx.xxx (host PC address)TWINCVICVICReport output Format (Rp output)PC2 / PC3 / PC4 / Specific / PC5A / PC5B / PC5CAssociated port To specify the link between the controller and the associated peripheral.Print at end of cycle When this parameter is validated, the tightening result is transmitted to the serial link at each end of cycle.Bar code Format CB1ActionAfter reading the bar code, the controller can perform one of the following actions:Nothing -> no actionReset -> reading the code implies an action which is identical to the Reset.Reset on NCYC OK -> reading the code implies a Reset when the programmed number of OK cycles is reached.Read by PLC The code is provided by the PLC.Associated portTo specify the link between the controller and the associated peripheral.6159932082-05English 14 / 38PARAMETERSTo add a bar code, click on thebutton and then on thebutton.Enter the code as follows: ###M19############ Select the cycle number in the list.The # represents the characters which are not taken into account in the reading.The other characters (M19 in the example) correspond to the code to be detected. When the code is read at the specified place,the corresponding cycle no. will be selected.Cycles TableWhen the Source of the Cycle Number is the Bar Code, the system determines the current cycle from the Bar Code/Cycle No. cross reference table which is entered in the Cycles Table screenSeveral codes can correspond to the same cycle number.The table can include a maximum number of 100 codes.Parallel printer Type EPSON (by default) / EPSON LQ / IBM Compact / IBM Proprinter / HP DeskJet 500 /HP Laserjet / HP 840Page length 6 - 80Upper margin 0 - 74Page width 1 - 120Left margin0 - 79PLC without fieldbus board Type Jbus / Modbus / UniTelway Master / Slave Selection of the set-upSlave number Controller address in a PLC network Data swapping (Option for UniTelway)Associated portIndicates the link between the controller and the associated peripheral.PLC with fieldbus board Fieldbus board If a fieldbus board is inserted, displays the card type: Profibus, Interbus, DeviceNet, Modbus+...Master / Slave Selection of the set-upNetwork address Selection of the TWINCVI number in this network Acyclic/Cyclic (Set-up specific to Profibus)Memory transfer (Set-up specific to Profibus) If not ticked: Standard I/O CVINet Data Collector Type of collected data Selection of the data that the controller must send:Results / Curves of good results / Curves of bad results Operating mode of the FIFO Blocking if full FIFO When the memory of the results to send is full, the next start cycle can be blocked or not (the start cycle is not blocked, but the next results are not stored).Alarm thresholdWhen the filling rate is above this value, an alarm can be generated (through an IsaGraf application).Synchronization of the hour This option is used to show the source authorised for updating the controller time: only by CVIPC / only by CVINet / CVIPC and CVINet Associated port Displays the used socket.ToolsNet Data Collector System typeSystem type by default: 3, for the Desoutter controllers. This parameter can be changed, when necessary, to be in line with the ToolsNet server configuration.6159932082-05English 15 / 38PARAMETERS3.2 - NotepadIt can be used to enter all types of data specific of the selected station (set-up/maintenance data, etc...).3.3 - SpindlesThe spindle can either be a fixed electric power tool or a hand-held electric power tool. The spindle is automatically recognised by the control system: its parameters cannot be changed.In the Toolsnet configuration, all the stations are grouped by system. Each system has a certain number of stations. In case of a TWINCVI configured in asynchronous mode, one controller has two stations, numbered consecutively.System number Identifies the controller, when used jointly with the station number.Station number Identifies the controller, when used jointly with the system number. (For a TWINCVI configured in asynchronous mode: use the first station number.)Time synchronization This option is used to show if the controller time is synchronized with the ToolsNet server.Associated port Displays the used socket.TWINCVICVIC6159932082-05English 16 / 38PARAMETERS3.4 - CyclesThe CVIPC software allows you to create:The following phases of a cycle are available:Spindle Select the spindle concerned.2nd transducer To define the characteristic values of the 2nd transducer (torque or torque + angle).Manufacturer ref.Allows you to display manufacturer's parameters.Controller parameters Comment 15 characters as a maximumFastener number Number assigned to the spindle (3 digits)Ergo-stopYes / No (to stop the tool progressively - see TWINCVI documentation)DatesThe dates displayed are the latest dates when the parameters were modified (in user, maintenance or superuser mode).Spindle ParametersThese parameters can only be displayed. They cannot be modified.Correction coefficients (not available on CVIC)Nominal load coefficient1.0000 by default. This coefficient allows you to take into account a reduction gear added to the tool. For example, when using a gear reduction of 2, the nominal load coefficient will be2.Gear ratio coefficient 1.0000 by default. This coefficient allows you to take into account the efficiency of a reduction gear added to the tool. e.g.: 1.15% (efficiency 85%).Sensitivity coefficient 1.0000 by default. Only on display, as it is automatically computed in one of the screens of the Test window.Torsion coefficient [°/Nm]0.0000 by default. This factor is used to compensate for a possible mechanical torsion of the spindle or of the crowfoot (available only for a tightening with angle-controlledstop).A cycle is a sequence of phases which are run consecutively. Each phase is defined by means of main parameters,tightening instructions and motor settings.TWINCVI from cycle no.1 to 250Each cycle can include up to 20 phases.CVIS from cycle no.1 to 15Each cycle can include up to 8 phases.CVIC-M or H from cycle no.0 to 7Each cycle can include up to 15 phases.CVIC-L cycle no.0 only (2 preset phases)CVIC-L+cycle no.1 onlyEach cycle can include up to 15 phases.Search sequence S runDown speed D Final speed phase F run Reverse R Action on NOK V Prevailing torque P synchro Waiting W (not available on CVIS)Jump phase J angle rundownd(for CVIC only)6159932082-05English 17 / 38PARAMETERSWhen this screen is displayed, you can either create a new cycle or change one of the pre-programmed cycles.An empty phase is considered as a fully valid phase. It shows the end of the current cycle. Introducing an empty phase is particularly interesting to carry out two actions one after the other to correct a fault.Example:F1VF2-----R1F3If the action on NOK gives an accept report, proceed to phase F2, then the cycle stops.If the action on NOK gives a reject report, proceed to phase R1 if the Action on NOK phase is programmed on Jump to Phase No. 5.TWINCVICVICCommentFree comment of 40 characters.Number of cycles OK Number of cycles OK to enable the NCYC OK output signal.Tightening results per phaseTo store the results per cycle or per phase.6159932082-05English 18 / 38PARAMETERSAction on cycle NOK (for a CVIC). When a cycle is NOK:3.4.1 - Add a cycleClick on Add a Cycle to create a cycle. The list of the cycle numbers still available is displayed. Select a number and validate.3.4.2 - Add a phaseThis allows you to add a phase after the selected phase. You can insert a phase at the beginning of the cycle by previously select-ing the relevant cycle.3.4.3 - DeleteUsing the mouse, select the item (phase or cycle) that you want to delete and press Delete.3.4.4 - CopyUsing the mouse, select the item (phase or cycle) that you want to copy and press Copy. Then click on Paste to copy this item to the current station or to another one.3.4.5 - PasteAfter pressing Copy, press Paste and then select the new phase number.3.4.6 - Cycle parameters 3.4.7 - Phase parameters 3.4.8 - Phase TypeAllows you to change the type of the current phase.Unused No actionCycle stop The cycle is stoppedRun reverse Stop the cycle then run reverse the specified number of rotations.Cycle To select the relevant cycle SpindleTo select the relevant spindleCycle parameters per spindleRP threshold [Nm]Threshold above which a report is generated.Coefficients Nominal load These parameters replace the normal correction coefficients when the station parameter Coefficients per Cycle is ticked.Gear ratio SensitivitySpindles to be run Select the spindle(s) concerned in the list (by default, all spindles are selected).Interphase time Waiting time programmed between this phase and the next one.Min. time Minimum phase running time.Max. timeMaximum phase running time.For a search sequence phase, the only main parameter that can be changed is the interphase time as the max. time is implicitly equal to the number of rotations x rotation time + stop time.。
ISCW10S06L01(IOS防火墙)

Firewall Technologies
Firewall Technologies
Firewalls use three technologies:
• Packet filtering包过滤 包过滤 • Application layer gateway应用层网关 应用层网关 • Stateful packet filtering基于状态的包过滤 基于状态的包过滤
Packet Filtering Example
Router(config)# access-list 100 permit tcp any 16.1.1.0 0.0.0.255 established Router(config)# access-list 100 deny ip any any log Router(config)# interface Serial0/0 Router(config-if)# ip access-group 100 in Router(config-if)# end
Modern DMZ Design
• Various systems (stateful packet filter, proxy server) can filter traffic. • Proper configuration of the filtering device is critical.
Stateful Packet Filtering
• Stateless ACLs filter traffic based on source and destination IP addresses, TCP and UDP port numbers, TCP flags, ICMP types and codes. • Stateful inspection then remembers certain details, or the state of that request.
D20S03L01

Fragment-Free • Switch checks the first 64 bytes, then immediately begins forwarding frame.
© 2002, Cisco Systems, Inc. All rights reserved.
ICND v2.0—3-6
Filtering Frames (Cont.)
• Station A sends a frame to station B. • The switch has the address for station B in the MAC address table.
© 2002, Cisco Systems, Inc. All rights reserved. ICND v2.0—3-11
• The frame from station D to station C is flooded out to all ports except port E3 (unknown unicasts are flooded).
© 2002, Cisco Systems, Inc. All rights reserved. ICND v2.0—3-9
• Build a functional access switch configuration to support the specified network operational parameters, given a network design
• Execute an add, move, or change on an access layer switch, given a new network requirement
D20S01L01

• Catalyst switch memory has initial configuration with default settings
• Cisco router will prompt for initial configuration if there is no configuration in memory
• Use the available configuration tools to establish connectivity to the appropriate network device in order to complete the initial device configuration • Verify the default configuration of each device, given a functioning access layer switch and router
© 2002, Cisco Systems, Inc. All rights reserved.
ICND v2.0—1-2
Operating Cisco IOS Software
©© 2002, Cisco Systems, Inc. All rights reserved. 2002, Cisco Systems, Inc. All rights reserved.
© 2002, Cisco Systems, Inc. All rights reserved.isco Device Startup
© 2002, Cisco Systems, Inc. All rights reserved.
ICND v2.0—1-7
ICND v2.0—1-3
aurora_64b66b_protocol_spec_sp011

aurora_64b66b_protocol_spec_sp011Aurora 64B/66B Protocol SpecificationSP011 (v1.2) July 23, 2010Xilinx is disclosing to you this Specification (hereinafter "the Specification") for use in the development of designs in connection with semiconductor devices. Xilinx expressly disclaims any liability arising out of your use of the Specification. Xilinx does not convey any license under its patents, copyrights, or any rights of others in connection with the Specification. Y ou are responsible for obtaining any rights you may require for your use or implementation of the Specification. Xilinx reserves the right to make changes, at any time, to the Specification without notice and at the sole discretion of Xilinx. Xilinx assumes no obligation to correct any errors contained in the Specification or to advise you of any corrections or updates. Xilinx expressly disclaims any liability in connection with technical support or assistance that may be provided to you in connection with the Specification.THE SPECIFICA TION IS DISCLOSED TO YOU "AS-IS" WITH NO WARRANTY OF ANY KIND. YOU BEAR THE ENTIRE RISK AS TO ITS IMPLEMENTA TION AND USE. YOU ACKNOWLEDGE AND AGREE THA T YOU HAVE NOT RELIED ON ANY ORAL OR WRITTEN INFORMATION OR ADVICE, WHETHER GIVEN BY XILINX, ITS EMPLOYEES OR CONTRACTORS. XILINX MAKES NO OTHER WARRANTIES, WHETHER EXPRESS, IMPLIED, OR STA TUTORY, REGARDING THE SPECIFICATION, INCLUDING ANY WARRANTIES OF MERCHANTABILITY, FITNESS FOR A P ARTICULAR PURPOSE, OR NONINFRINGEMENT OF THIRD-PARTY RIGHTS.IN NO EVENT WILL XILINX BE LIABLE FOR ANY CONSEQUENTIAL, INDIRECT, EXEMPLARY, SPECIAL, OR INCIDENTAL DAMAGES, INCLUDING ANY LOSS OF DA TA OR LOST PROFITS, ARISING FROM OR RELATING TO YOUR USE OF THE SPECIFICA TION, EVEN IF YOU HAVE BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES.2008, 2010 Xilinx, Inc. All rights reserved.XILINX, the Xilinx logo, the Brand Window, and other designated brands included herein are trademarks of Xilinx, Inc. All other trademarks are the property of their respective owners.Revision HistoryThe following table shows the revision history for this document.Date Version Revision03/31/08 1.0Initial Xilinx release.09/19/08 1.1Minor typographical edits. Changed block codes to blocks. Removed Not Ready blocks from Simplex in Table4-1, page36. Clarified simplex Aurora channel bonding inSection4.2.2“Channel Bonding,” page36. Added Appendix1, “References.”07/23/10 1.2Updated Section1.2“Scope” and Section8.1“Overview.”Deleted Sections 8.4 Transmitter Specifications, 8.5 Receiver Specifications, and 8.6Receiver Eye Diagrams.Table of ContentsSchedule of Figures. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Schedule of Tables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Preface: About This SpecificationSpecification Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12 Typographical. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Online Document. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12State Diagram Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 Section1: Introduction and Overview1.1:Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 1.2:Scope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 1.3:Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Section2: Data Transmission and Reception2.1:Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 2.2:Block Codes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 2.3:Frame Transmission Procedure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 2.3.1:Link-Layer Frame Delineation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.3.2:64B/66B Encoding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.3.3:Serialization and Clock Encoding. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 2.3.4:Multi-Lane Transmission. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.4:Frame Reception Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 2.4.1:Deserialization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 2.4.2:64B/66B Decoding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 2.4.3:Control Block Stripping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.4.4:Multi-Lane Reception. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.5:Data and Separator Block Format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 Section3: Flow Control3.1:Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 3.2:Native Flow Control Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.3:Native Flow Control Latency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 3.4:Native Flow Control Block Format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.5:User Flow Control Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 3.6:User Flow Control Message Format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Section4: Initialization and Error Handling4.1:Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 4.2:Aurora Channel Initialization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.2.1:Lane Initialization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.2.2:Channel Bonding. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 4.2.3:Wait For Remote . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.3:Error Handling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.4:CRC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 Section5: PCS Layer5.1:Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.2:Aurora Encoding. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.2.1:Block Codes in 64B/66B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.2.2:Idle/Not Ready/Clock Compensation/Channel Bonding Block Code. . . . . . 405.2.3:Native Flow Control Block Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425.2.4:Data Block Code for Frame Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425.2.5:Separator Block Code. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425.2.6:Separator-7 Block Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.2.7:User Flow Control Block Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.2.8:Data Block Code for User Flow Control Message . . . . . . . . . . . . . . . . . . . . . . . . 445.2.9:User K-Block Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.3:64B/66B Scrambling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.4:64B/66B Gearbox . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.5:Channel Bonding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.6:Clock Compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 Section6: Channel Control6.1:Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.2:Idle Block Striping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.2.1:Not Ready Blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.2.2:Idle Blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.2.3:Clock Compensation Blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.2.4:Channel Bonding Blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.3:Native Flow Control Striping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.4:Frame Data Striping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.5:Strict-Alignment Frame Data Striping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.6:User Flow Control Striping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.7:Strict-Alignment User Flow Control Striping . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.8:User K-Block Striping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 Section7: PMA Layer7.1:Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497.2:Bit and Byte Ordering Convention. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497.3:Serialization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Section8: Electrical Specifications8.1:Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 518.2:Signal Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 518.3:Equalization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 Appendix1: ReferencesSchedule of FiguresPreface: About This SpecificationFigure P-1:Properties of Literals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Figure P-2:State Machine Diagram Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Section1: Introduction and OverviewFigure 1-1:Aurora Protocol Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Figure 1-2:A Simplex Connection Between a Pair of Aurora Lanes . . . . . . . . . . . . . . . . . 18Figure 1-3:A Single-Lane, Simplex Aurora Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Figure 1-4:A Multi-Lane, Simplex Aurora Channel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Figure 1-5:A Single-Lane, Full-Duplex Aurora Channel. . . . . . . . . . . . . . . . . . . . . . . . . . . 20Figure 1-6:A Multi-Lane, Full-Duplex Aurora Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Section2: Data Transmission and ReceptionFigure 2-1:Mapping Frames to Encoded Block Codes for Transmission. . . . . . . . . . . . . 23Figure 2-2:Receiving Data from an Aurora Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Figure 2-3:Data Block Used for Frame Data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Figure 2-4:Separator Block. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Figure 2-5:Separator-7 Block. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Figure 2-6:Example of Frame Data Transfer through a Single-Lane Channel . . . . . . . . 27Figure 2-7:Example of Frame Data Transfer through a Multi-Lane Channel . . . . . . . . . 27Section3: Flow ControlFigure 3-1:NFC Block . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Figure 3-2:UFC Block with UFC Header. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Figure 3-3:Data Block Used to Carry UFC Message Data . . . . . . . . . . . . . . . . . . . . . . . . . . 31Figure 3-4:Example UFC Messages for Single-Lane Channel . . . . . . . . . . . . . . . . . . . . . . 31Figure 3-5:Example UFC Messages for a Multi-Lane Channel. . . . . . . . . . . . . . . . . . . . . . 32Section4: Initialization and Error HandlingFigure 4-1:Initialization Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Figure 4-2:Block Sync State Machine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Section5: PCS LayerFigure 5-1:Idle/Not Ready/NFC Block Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Figure 5-2:Native Flow Control Block Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Figure 5-3:Data Block Code Carrying Frame Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Figure 5-4:Separator Block Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Figure 5-5:Separator-7 Block Code. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Figure 5-6:User Flow Control Block Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 Figure 5-7:Data Block Code Carrying User Flow Control Message Data. . . . . . . . . . . . . 44 Figure 5-8:User K-Block Code Format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44Section6: Channel ControlSection7: PMA LayerFigure 7-1:Serialization Order for Aurora 64B/66B Block Codes. . . . . . . . . . . . . . . . . . . . 49Section8: Electrical SpecificationsFigure 8-1:Differential Peak-To-Peak Voltage of Transmitter or Receiver. . . . . . . . . . . 51Appendix1: ReferencesSchedule of TablesPreface: About This SpecificationTable P-1:Radix Specifics of Literals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Table P-2:Examples of Extended Values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Section1: Introduction and OverviewSection2: Data Transmission and ReceptionTable 2-1:Aurora 64B/66B Blocks Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Table 2-2:Normal Aurora 64B/66B Block Transmission Priority . . . . . . . . . . . . . . . . . . . . 22Table 2-3:Aurora 64B/66B Block Transmission Priority during Flow Control Countdown 23 Section3: Flow Control Section4: Initialization and Error HandlingTable 4-1:Required Block Transmission during Lane Initialization. . . . . . . . . . . . . . . . . 36Table 4-2:Required State Transition after Lane Initialization . . . . . . . . . . . . . . . . . . . . . . 36Table 4-3:Required State Transition after Successful Channel Bonding. . . . . . . . . . . . . 37Section5: PCS LayerTable 5-1:Valid Block Type Field Values in Aurora 64B/66B. . . . . . . . . . . . . . . . . . . . . . . 40Table 5-2:Valid Octet Count Field Values for Separator Block Code. . . . . . . . . . . . . . . . 43Table 5-3:Valid Block Type Field Values for User K-Blocks . . . . . . . . . . . . . . . . . . . . . . . 44 Section6: Channel Control Section7: PMA LayerSection8: Electrical SpecificationsAppendix1: ReferencesPreface About This SpecificationThis specification describes the Aurora 64B/66B protocol. Aurora is a lightweight link-layer protocol that can be used to move data point-to-point across one or more high-speed serial lanes. Aurora 64B/66B is a version of the protocol using 64B/66B encoding instead of 8B/10B.Specification ContentsThis manual contains the following:Section1, “Introduction and Overview”provides an overview of the Aurora 64B/66B protocol.Section2, “Data Transmission and Reception”describes the procedures for transmitting and receiving data using an Aurora 64B/66B Channel.Section3, “Flow Control”describes the optional flow control features in the Aurora64B/66B protocol.Section4, “Initialization and Error Handling”describes the procedure used to preparean Aurora channel for operation.Section5, “PCS Layer”specifies the functions performed in the physical coding sub-layer (PCS) of the Aurora 64B/66B protocol.Section6, “Channel Control”defines the striping rules for using multi-lane channels. Section7, “PMA Layer”specifies the functions performed in the PMA layer of the Aurora 64B/66B Protocol.Section8, “Electrical Specifications”describes the AC specifications, covering both single- and multi-lane implementations.ConventionsThis document uses the following conventions.T ypographicalThe following typographical conventions are used in this document:Online DocumentThe following conventions are used in this document:NumericalConventionMeaning or UseExampleItalic fontReferences to other manualsSee the Development System Reference Guide for more information.Emphasis in textIf a wire is drawn so that itoverlaps the pin of a symbol, the two nets are not connected.To emphasize a term the first time it is used The state machine uses one-hot encoding.REG[FIELD]Abbreviations or acronyms for registers are shown in uppercasetext. Specific bits, fields, or ranges appear in bracketsREG[11:14]ConventionMeaning or UseExampleBlue textCross-reference link to a location in the current document See the section “AdditionalResources” for details.Refer to “Title Formats” inSection 1 for details.Red textCross-reference link to a location in another document See Figure 2-5 in the Virtex-II Platform FPGA User Guide.Blue, underlined textHyperlink to a website (URL)Go to /doc/10fb3b7b1711cc7931b716ea.htmlfor the latest speed files.Convention Meaning or Usen A decimal value[n:m ]Used to express a numerical range from n to m x Unknown value zHigh impedanceValues of LiteralsLiterals are represented by specifying three of their properties as listed and shown in Figure P-1 and in Table P-1 and Table P-2:1.Width in bits 2.Radix (Base)3.ValueTable P-1 shows the Radix specifics:All values are extended with zero except those with x or z in the most significant place; they extend with x or z respectively. A list of examples is shown in Table P-2:Figure P-1:Properties of LiteralsTable P-1:Radix Specifics of LiteralsRadix SpecifierRadixb Binary d Decimal h Hexadecimal oOctalTable P-2:Examples of Extended ValuesNumber Value Comment8’b000000000An 8-bit binary number with value of zero. (Zero extended to get 8 bits.)8’bx xxxxxxxxAn 8-bit binary number with value unknown. (x extended to get 8 bits.)8’b1x 0000001x An 8-bit binary number with value of 2 or 3, depending on the value of x.8’b0x 0000000x An 8-bit binary number with value of 0 or 1, depending on the value of x.8’hx xxxxxxxx An 8-bit hexadecimal number with value unknown.(x extended to get 8 bits.)8’hzx zzzzxxxx An 8-bit hexadecimal number with the upper four bits not driven and the lower four bitsunknown.8’b100000001An 8-bit binary number with value of one.8’hz1zzzz0001An 8-bit hexadecimal number with the upper four bits not driven and the lower four bits having value of one.8’bx1xxxxxxx1An 8-bit binary number that is odd.8’bx0xxxxxxx0An 8-bit binary number that is even.State Diagram ConventionsThis section describes the conventions used in the state diagrams for this document. The numbered sections correspond to the call-outs shown in the state machine diagram in Figure P-2, page 15.States1. A state is represented by a rectangle.2.The name of the state is indicated in bold.State T ransitions3.State transition is indicated by an arrow annotated in italics.State Machine OutputsOutputs are shown in plain text. Outputs can be shown inside of state rectangles or can be part of the annotation associated with a transition arrow. If a signal is not listed in a state rectangle or on a transition arrow, its value at that time is 0 (not asserted). If a registered output does not appear in the state rectangle or transition arrow annotation, then its value is unchanged from the previous value.Output T ypesOutputs are divided into three classes as shown in the examples below.4.Asserting control signals:go = 1link reset = 15.Register initialization:XYZ Register = 78New Counter = 0xmit = /SP/ (an ordered set)6.Incrementing or decrementing a register:XYZ Register = XYZ Register + 1New Counter = New Counter – 68’hz zzzzzzzz An 8-bit hexadecimal number with value not driven. (z extended to get 8 bits.)8’h0z 0000zzzzAn 8-bit hexadecimal number with upper nibble specified and the lower not driven.11’d n n An 11-bit decimal number with value n .6’h n nA 6-bit hexadecimal number with value n .w’b101(101)A binary number with value 5 and an unknown width.Table P-2:Examples of Extended Values (Cont’d)Number Value CommentFigure P-2:State Machine Diagram ConventionsSection1 Introduction and Overview1.1IntroductionAurora is a lightweight link-layer protocol that can be used to move data point-to-pointacross one or more high-speed serial lanes. Aurora 64B/66B is a version of the protocolusing 64B/66B encoding instead of 8B/10B.1.2ScopeThe Aurora 64B/66B Protocol Specification defines the following:Electrical specifications: This includes signaling levels for an Aurora serial link.PMA layer: This includes specification for serialization bit ordering and byteordering.Physical coding sub-layer (PCS): This includes specification for data encoding anddecoding, data scrambling, the 64B/66B gearbox, clock compensation and channelbonding.Channel control: This includes specifications for multi-lane striping and forscheduling the transmission of data and control information.Cyclic redundancy check (CRC): The Aurora protocol recommends a CRCmechanism compatible with the standard 64B/66B scrambling algorithm.1.3OverviewThe Aurora protocol (Figure1-1, page18) describes the transfer of user data across anAurora channel, consisting of one or more Aurora lanes. Each Aurora lane is a serial dataconnection, either full-duplex or simplex. Devices communicating across the channel arecalled channel partners.Aurora interfaces allow user applications to transfer data through the Aurora channel. Theuser interface on each Aurora interface is not defined in this specification and can bedecided independently for each implementation of the protocol.Aurora channels have the following properties:Data is transferred through the Aurora channel in frames.Frames share the channel with control information such as flow control messages,clock compensation sequences and idles.Frames can be of any length, and can have any format. Only the delineation of framesis defined in this specification.Frames in Aurora do not have to be contiguous — they can be interrupted at any time by flow control messages or idles.There is no gap required between frames in Aurora.Figure 1-1:Aurora Protocol OverviewFigure1-2 shows a simplex connection between a pair of Aurora lanes, depicting the functional blocks comprising the PCS and PMA layers of an Aurora connection. These blocks are specified in detail in this document.Figure 1-2: A Simplex Connection Between a Pair of Aurora LanesAurora interfaces allow applications to communicate using Aurora channels. Aurora interfaces are made up of one or more Aurora lanes, either simplex or full-duplex. The four possible configurations of Aurora interfaces are shown in Figure1-3, Figure1-4,Figure1-5, page20, and Figure1-6, page20.Figure1-3 shows a single-lane, simplex Aurora interface transmitting to another single-lane, simplex Aurora interface. In this configuration, each interface uses a single lane to transmit or receive from the Aurora channel. Channel control in each interface initializes the channel passing control to the user application.Figure 1-3: A Single-Lane, Simplex Aurora ChannelFigure1-4 shows a multi-lane, simplex Aurora interface transmitting to another multi-lane, simplex Aurora interface. In multi-lane configurations, the channel control bonds the lanes to eliminate skew between channels as a part of the channel initialization procedure. During normal operation, the channel control logic distributes data and control information across all the lanes in the channel.Figure 1-4: A Multi-Lane, Simplex Aurora Channel。
ICDPPCNEXUS MPC55xx MPC56xx In-Circuit Debugger
ICDPPCNEXUSMPC55xx / MPC56xx In-Circuit DebuggerQuick Start GuideCopyright 2009, P&E Microcomputer Systems, Inc. All rights reserved.Visit us on the web at Document Version HistoryVersion Date Notes1.0 21 Sep 2009 Initial versionCONTENTS1 Introduction (4)1.1 P&E Compatible Hardware (4)2 Getting Started (5)2.1 Connecting to your Target (5)2.2 Reset Script (6)2.3 Loading Data and Debug Information (7)2.4 CPU and Memory Windows (8)3 Debugging (10)3.1 GOTIL command (10)3.1 Stepping through C instructions (11)3.3 Setting and Reaching Breakpoints (12)3.4 Using Code Window Popup Debug Evaluation Hints (13)3.5 Using the Variables Window (15)3.6 Modifying a Variable (16)3.7 Using the Register Interpreter (17)3.8 Adding Register Field Descriptions to the Variables Window (20)1 IntroductionThis document is a step-by-step guide to using the P&E ICDPPCNEXUS in-circuit debugger software, which is compatible with Freescale MPC55xx / MPC56xx processors. This guide covers the most commonly used features of the debugger: loading binary & debug information, accessing CPU registers & memory, stepping code, setting breakpoints, and monitoring variables.1.1 P&E Compatible HardwareThe following lists the P&E hardware compatible with the ICDPPCNEXUS debugger software.P&E Part Number Interface to host PCCABPPCNEXUS Parallel (LPT) portUSB-ML-PPCNEXUS USB 2.0 (Backwards compatible with USB 1.1 ports) Cyclone MAX Serial (RS232) portUSB 1.1 (Upwards compatible with USB 2.0 ports)Ethernet2 Getting Started2.1 Connecting to your TargetUpon starting the debugger, the connection assistant dialog appears:•Use the “Interface” and “Port” drop-down menus to choose the P&E hardware interface connected between the PC and your target board.•The “Target CPU” setting can safely be left at the “Autodetect” setting for most users. If you experience problems connecting, you can try specifying the exact Freescale device that you are connecting to.• A BDM_SPEED parameter between 2 to 4 can typically be used.Processors running at slower clock speeds will require higher values.Click the Connect button, and ICDPPCNEXUS will attempt to contact the processor. Using the default debugger settings, ICDPPCNEXUS will establish communications and reset the processor.After establishing communications, the main debugger screen will appear, and a debugger reset script macro should automatically execute and complete.2.2 Reset ScriptThis section explains the initialization that the debugger, using a reset script macro file, performs on the processor. The user can view and modify all of the macro file's initialization tasks.The processor Boot Assist Module (BAM) would normally initialize the memory of the processor. However, when running the target application from the debugger, the BAM functionality is disabled. To account for this, the debugger must run a script file on reset. The script initializes the memory of the processor similar to the way in which the BAM would initialize the processor.If ICDPPCNEXUS is launched from the Freescale CodeWarrior IDE, the correct reset script file is automatically selected.If ICDPPCNEXUS is launched stand-alone, the reset script file may need to be configured. Several reset script macros are included with the ICDPPCNEXUS debugger and have a .mac extension. For detailed information, you can view each macro file using a simple text editor such as Notepad. The macro contents will contain useful comments, such as which devices are supported by that particular macro.To configure the debugger reset script macro, select the debugger Configuration menu, Automated Script Options dialog, shown here:2.3 Loading Data and Debug InformationIf ICDPPCNEXUS is launched from the Freescale CodeWarrior IDE, your code will automatically be downloaded to the processor.•RAM projects are loaded into the processor’s internal SRAM.•FLASH projects will invoke the CPROGPPCNEXUS Flash programming software to burn the code into the processor’s internal FLASH.The debug information is also automatically loaded from CodeWarrior, which will allow you to debug using your high level source code and variables.If ICDPPCNEXUS is launched stand-alone, you will need to manually download the code and debug information. Launch the Load Dialog by clicking on the High Level Load button on the debugger tool bar:This dialog allows you to specify the binary/debug file and whether to load into RAM or FLASH. Once you are satisfied with your settings, press the “Process Load Command” button to begin the download process. This step will also load the debug information.2.4 CPU and Memory WindowsThe CPU Window displays all CPU core registers, including the Program Counter (PC) and all general purpose registers.•To modify CPU register contents, double-click the register value. You will be prompted for a new value.The Memory Window displays data at any given memory address. It can be used to view RAM contents, FLASH contents, and values of peripheral registers.•To change the memory address, right-click inside the Memory Window and select “Set Base Address”. You will be prompted for a new address to begin displaying data.•To change the contents in memory, double-click the value in memory that you would like to change. You will be prompted for a new value.3 DebuggingThis section outlines the different debugging capabilities available in the ICDPPCNEXUS debugger once the debug information has been loaded.3.1 GOTIL commandAt this point, your source window will show the assembly language startup code generated by the compiler:If you do not need to debug this section and would like to run the processor until the beginning of your “main” function, you can use the “GOTIL” command.•Type “GOTIL main” in the Status window to tell the debugger to run code until it reaches the “main” function of your code.The “GOTIL” command works with any function in your code.3.1 Stepping through C instructionsStep through the initialization code, or any source code, using the high-level language source step command. Use this feature by typing “HSTEP” in the Status window or by clicking the high-level step button on the debugger tool bar:Each time the HSTEP command executes, the debugger will rapidly single step assembly instructions until it encounters the next source instruction, at which point target execution will cease. When the debugger reaches the next source instruction, all visible windows will be updated with data from the board. After reaching the main function, step through several C language instructions. Notice that some instructions will take longer to step through than others because each C instruction may consist of a greater or fewer number of underlying assembly instructions.3.3 Setting and Reaching BreakpointsIn the source code window, there will be a small red dot and a small blue arrow next to each source instruction that has underlying object code. If a large blue arrow appears on a source line, this indicates that the program counter (PC) currently points to this instruction. If a large red stop sign appears on the source line, this indicates that a breakpoint exists on this line.•Set a breakpoint at an instruction by double-clicking the tiny red dot.•To remove a breakpoint, double-click the large red stop sign.Execution will begin in real-time when you issue the HGO command or click the high-level language GO button on the debugger tool bar:If the debugger encounters a breakpoint, execution will stop on this source line. If it does not encounter a breakpoint, target execution will continue until you press a key or use the stop button on the debugger tool bar:•By double clicking the small blue arrow, you will be issuing a GOTIL command to the address of this source line.A GOTIL command will set a single breakpoint at the desired address, and the processor will begin executing code in real-time from the current program counter (PC). When the debugger encounters the GOTIL address, execution stops. If the debugger does not encounter this location, execution continues until you press akey or use the stop button on the debugger tool bar. Note that all user breakpoints are ignored when the GOTIL command is used.You may also double-click the red and blue symbols in the disassembly window. The disassembly window may display an additional symbol, a small, blue "S" enclosed in a box. This indicates that that a source code instruction begins on this disassembly instruction.3.4 Using Code Window Popup Debug Evaluation HintsWhen debugging source code, it is convenient to view the contents of a variable while viewing your source code. The in-circuit debugger has a feature, debug hints, which displays the value of a variable while the mouse cursor is held over the variable name. The hint may be displayed in any of three locations, as shown below.The three locations for the debug hints are the code window title bar, the status window caption bar, and a popup hint that appears over the variable in source code. You can configure the hints to display in any combination.•Set the locations of debug hints in the configuration menu of the debuggerThe information in the popup hint box is similar to the information displayed in the variables window.The information includes the variable name (i), value ($1), and type (signed long).3.5 Using the Variables WindowThe variables window displays the current value of application variables. The following window shows a display of variables from the example application.Variables that are pointer or reference types are displayed in red. Normal variables are displayed in black.•Add a variable by typing the VAR command, by right clicking the variables window and choosing “Add a variable”, or by hitting the "Add Variable"button in the variables window.When adding a variable using the pop-up menu, the debugger displays the following screen.In the variable field, type the address or name of the variable. Typically, set the type of the variable to “Default”, which means that the variable will be displayed as it is defined in the debugging information. When adding a variable, you may specify the numeric display base of the variable.3.6 Modifying a Variable•To modify the current value of a variable, right-click the variable name in the variables window and select “Modify Variable” to display a dialog.Check the “Modify value” checkbox, and type the variable’s new value. After you click the OK button, the debugger updates the variable value on the target, and the debugger refreshes the variable window to display the new value. Note that the debugger will not edit certain user-defined types, such as enumerated types.•You may also modify a variable’s display properties, such as the type or numeric display base using this dialog.3.7 Using the Register InterpreterThe register interpreter provides a descriptive display of bit fields within the processor’s peripheral registers. The register interpreter allows you easily to change the value of these registers. You may quickly check the current state of a peripheral and examine the configuration of the target device.When you use the register interpreter within the debugger, it reads the current value of the peripheral register, decodes it, and displays it.To launch the register interpreter in the debugger, either use the “R” command or click the view/edit register button on the tool bar:A window will appear that allows you to select a peripheral block to examine.Double clicking the module of choice will launch the register selection window.Double clicking a specific register will launch the edit/display window for that register.The window lists the keystrokes and mouse actions, allowing you to modify the values of each of the fields. After right clicking on a specific field, the register interpreter will display all options for that field.When you quit the register view/edit window by hitting the ESC key, you will be given the opportunity to write the new value into the register, as shown in the following window.3.8 Adding Register Field Descriptions to the Variables WindowAdd register bit fields to the variables window by using the “_TR” command in the debugger or by clicking the "Add Register" button in the variables window. After selecting the register field, the field appears in the debugger variables window, and the debugger will continually update its value.。
网络管理员练习题及答案
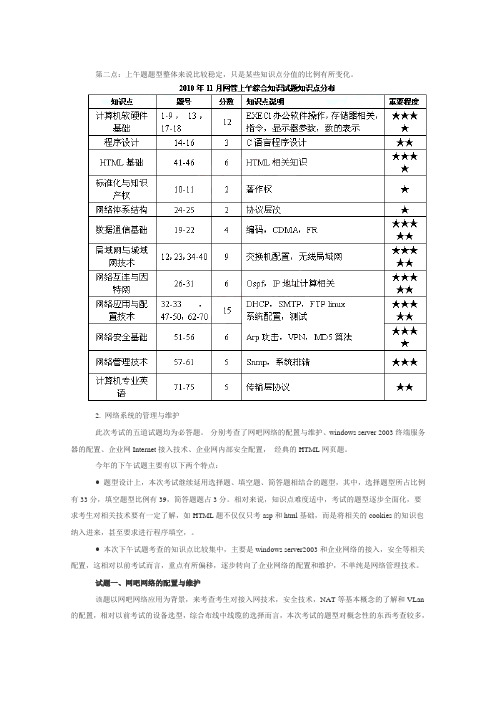
第二点:上午题题型整体来说比较稳定,只是某些知识点分值的比例有所变化。
2. 网络系统的管理与维护此次考试的五道试题均为必答题。
分别考查了网吧网络的配置与维护、windows server 2003终端服务器的配置、企业网Internet接入技术、企业网内部安全配置,经典的HTML网页题。
今年的下午试题主要有以下两个特点:● 题型设计上,本次考试继续延用选择题、填空题、简答题相结合的题型,其中,选择题型所占比例有33分,填空题型比例有39,简答题题占3分。
相对来说,知识点难度适中,考试的题型逐步全面化,要求考生对相关技术要有一定了解,如HTML题不仅仅只考asp和html基础,而是将相关的cookies的知识也纳入进来,甚至要求进行程序填空,。
● 本次下午试题考查的知识点比较集中,主要是windows server2003和企业网络的接入,安全等相关配置,这相对以前考试而言,重点有所偏移,逐步转向了企业网络的配置和维护,不单纯是网络管理技术。
试题一、网吧网络的配置与维护该题以网吧网络应用为背景,来考查考生对接入网技术,安全技术,NAT等基本概念的了解和VLan 的配置,相对以前考试的设备选型,综合布线中线缆的选择而言,本次考试的题型对概念性的东西考查较多,相对来说,这些都是基础概念都是网络管理员必须要掌握和理解的概念,试题的难度和范围都控制在基本知识点和概念的范围内。
试题二、windows server 2003终端服务器的配置该题以在windows server 2003终端服务器配置为基础,要求考生掌握与终端服务相关的基本概念,协议,端口,用户权限和客户端配置的了解,这道题相对比较简单,即使经验不丰富,题目图示的信息也能轻松选择出正确的答案。
试题三、企业网Internet接入技术本题考察的知识点比较灵活,涉及到拓扑图和DHCP服务,Ping命令的应用。
粗看上去感觉题目较复杂,但是仔细从图中观察都可以获得结果。
ioLogik E1200 Series (E1210) 固件发布说明书

Firmware for ioLogik E1200 Series (E1210) Release NotesSupported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• Added SNMP Trap Community Setting to the web console.• Added a note on the password settings page that passwords are limited to 16 characters.• Fixed DHCP lease time did not ask for extension when half of the lease time elapsed.• Closed IP forwarding function (Port 0).• Closed UDP Port 161 when SNMP agent is disabled.• Fixed RESTful API header case-sensitive issue.• Fixed invalid token issue on login page when using Firefox.EnhancementsN/AioLogik E1210-T, ioLogik E1210• Added OPTIONS method for RESTful API.• Added quick access URI for RESTful API.New FeaturesN/A• This version of the firmware only works with ioSearch v2.0 or later versions.• To prevent system failure, only update the next or the previous released firmware version to prevent from system failure.Supported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Fixed file transfer problems when using the Chrome browser (e.g., firmware update, configuration import or export).EnhancementsN/AioLogik E1210, ioLogik E1210-T• Added the EtherNet/IP protocol.• Added RESTful API.• Added new registers for the Modbus/TCP protocol.• Added new OIDs for the SNMP protocol.• Modbus, EtherNet/IP, and RESTful services can be disabled (enabled by default).• Added sending heartbeat to port 9500 of MX-AOPC UA Server after the heartbeat function is enabled.• Increased password length from 8 to 16 characters.• Added a function to check special characters to prevent Cross-Site Scripting.• Passwords are now sent using the POST method instead of the GET method.New FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/AN/AEnhancementsN/AioLogik E1210, ioLogik E1210-T• Improved protocol efficiency for the ioLogik 2500 Series.New FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Unable to disable the P2P heartbeat interval.• When the P2P client heartbeat is larger than 256 the time interval is incorrect.EnhancementsN/AioLogik E1210, ioLogik E1210-T• Supports ioLogik 2500 expansion mode.• Supports setting an initial value for a counter.New FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• The counter storage is deleted when the power fails.EnhancementsN/AioLogik E1210-T, ioLogik E1210• Supports SNMP protocol.• Added P2P heartbeat function.New FeaturesN/A• This version of firmware only works with ioSearch v1.5 or later versions.• Use the web console when upgrading the firmware from v1.0 to v1.10.Supported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• Ensured that the system works properly after unstable power conditions.N/AEnhancementsN/AioLogik E1210, ioLogik E1210-TN/ANew FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• Improved firmware upgrading speed.• Removed Modbus/TCP ID checking mechanism.N/AEnhancementsN/AioLogik E1210, ioLogik E1210-T• Added "Locating I/O" function in General Settings.• Added Modbus address function code=0x08 for “ECHO” function.• Counter overflow status displayed in Channel Settings can be cleared manually.New FeaturesN/A• This version of the firmware only works with ioSearch v1.5 or later versions.• Use the web console when upgrading the firmware from v1.0 to v1.9.。
LA104逻辑分析器用户手册V1.0说明书

This user manual is based on APP1.01.目 录1. 2. Product Introduction 3. Interface4. Detailed Instructions5. Technical Support6. Legal StatementsSafety Statement P1P3P7P16P20P221In order to ensure the correct and safe use of this product, please read and comply with the following safety precautions.Damage caused by any violations of the following safety precautions will be borne by User.1. Safety Statement1.1 Use proper power cordPlease use power cord specified for this product and certified for your country/district of use.1.2 Comply With All Terminal RatingsTo avoid fire or electric shock, please comply with all terminal ratings and marking instructions, avoiding damaging the device. Before connecting devices, please consult the product manual or product label first to know the information about the ratings.Read carefully all the following safety precautions to avoid personal injury and prevent damage to the device or any products connected to it.Safety Statement121.4 Use Proper Over Voltage ProtectionMake sure no over voltage (such as voltage caused by lightening) can reach the device, otherwise, user may get an electric shock.1.5 Do Not Operate With Opening Back Case 1.6 Avoid Exposure of CircuitWhen Power is on, do not touch the exposed joints or components.If suspect failure of device, stop operating device. Please contact your seller for product testing, maintaining, adjustment or parts replacing.1.7 Do Not Operate in Wet or Inflammable/Explosive Conditions 1.8 Keep Product Surface Clean And Dry 1.9 Take On Antistatic ProtectionStatic electricity may cause damage to device, please operate in antistatic space.When connecting devices, both internal and external conductors should be earthed briefly to release static electricity.1.3 Connect and Disconnect Measuring Cables Correctly Before connecting/disconnecting measuring cables, please turn off the power of the measured circuit, turn on the power after correctly connecting.43. Parameters4100M Sa /S 10ns 0-5V 1M Ω1.2-3V 4PWM ,SPI ,I2C ,UART3V 1Fig 2.1 Functional ParametersMeasuring Input ParametersOutput ParametersChannel Max Sampling RateMin Captured Pulse width Input Voltage Range Equivalent Input ImpedanceThreshold VoltageProgrammable Output ChannelProgrammable Output Type Programmable Output Amplitude3V Power Output Channel82 1.1Main Menu BarIn:SPITrigger Line Protocol Analysis Data5 Measurement Zone122. Menu Options Introduction2.1 User-defined Protocol Analysis Option2.2 SPI Protocol Analysis OptionCS Enable Clock PolarityClock Phase Bit OrderWord Size Data FormatCS (Chip Select) Enabling Conditions: 0 indicates Low Level Enabling; 1 indicates High Level EnablingClock Polarity: 0 indicates Low Level; 1 indicates High LevelClock Phase: 0 indicates to read data on the first Saltus;1 indicates to read data on the second SaltusData Bit Sequence: LSB indicates Least Significant Bit in the front; MSB indicates the Most Significant Bit in the frontData Length Displaying Format of Analysis Data132.3 12C Protocol Analysis OptionR/W bit set 0Data Format2.4 UART Protocol Analysis OptionBaud Rate Data Bits Stop Bits Parity Type Bit Order Invert Signal Data FormatSet Reading/Writing Bit when Addressing Displaying Format of Analysis DataBaud Rate Data Bits Stop Bits Calibration Setting Data Bit Sequence Invert SignalDisplaying Format of Analysis Data142.5 Time OptionTime Base T1.Posi T2.Posi X.Posi2.6 Trigger OptionsTriCondTriMask TriWidth Threshold Tri TypeNE_CM/EQ_CM/Any/LNE_W/LEQ_W/GNE_W/GEQ_WMin. Unit of Ruler Position of Cursor T1Position of Cursor T2Waveform Offsetting TimeChannels 1-4ConditionChannels 1-4Combination SettingsTrigger Pulse WidthSettings of Level Threshold ValueNot equal/Equal to Combination Condition Trigger/Arbitrary Trigger/Not equal/Equal to Continuous Pulse Width less than Threshold Value TriggerIncompatible/Compatible with ContinuousPulse Width larger than Threshold Value TriggerRising Edge/Falling Edge: Corresponding to Channels 1-4 from left to right √ indicates selecting this Channel; × indicates this Channel does not TriggerCondition: Use Encoder “A” to Select Channel and then press “OK” to Switch2.8 Output Options2.9 File Saving Options16Save param Restore paramVolume BKlight Standby Power offDetailed Instructions41. Interface Settings1. Select the Protocol Type or User-defined Type for the Measured SignalSave Current Option ParametersReset to Defaults Buzzer Volume LCD Backlight BrightnessStandby Time Auto Power-off Time2. Connect Measuring Cable1) Connect LA104's Ground Wire (GND) with the ground wire of the Measured Device;2) Connect LA104's Input Channels with the Pins to be measured.Be careful when plugging/unplugging the Measuring Cable to avoid damaging the Measured183. Collection Analysis1) Slid Encoder A to “Out SPI” and press the “SMPL” button to begin collecting.Pres “OK” to send out Signal, and check the Waveform after some time;2) Adjust the TimeBase Parameters to the right Waveform Ratio;193) Moving X. Posi to the Waveform of the Period you want to observe;4) Settings of Protocol Analysis;Select the Data Type you want to check in the Protocol'sSubmenus;5) Check the Measured Data;Check the Measured Data between T1 and T2 by adjusting thepositions of Cursors T1 and T2.Technical Support51. Firmware Update1.Visit to download the latest firmware of your logic analyzer to your PC.2.Long press both LA104’s power button and SMPL button to enter DFU firmware upgrade mode.2021。
POST 错误消息和蜂鸣代码
POST 错误消息和蜂鸣代码POST 错误消息简介非数字消息或仅蜂鸣100 系列错误消息200 系列错误消息300 系列错误消息400 系列错误消息600 系列错误消息1100 系列错误消息1600 系列错误消息1700 系列错误消息POST 错误消息简介本节中的错误消息和代码包括ProLiant 服务器在加电自检(POST) 过程中生成的所有消息。
某些消息仅供参考,并不代表发生了错误。
所有POST 错误消息和蜂鸣代码在操作系统加载之前出现。
因此,服务器生成的代码仅与其BIOS 配置和安装的硬件有关。
要查看屏幕上的错误消息,服务器的视频子系统必须正常工作。
如果视频工作不正常,请使用服务器加电自检过程中产生的蜂鸣代码来查找视频故障原因。
处理器、内存、视频控制器或系统主板故障均会在POST 过程中造成视频问题。
NOTE: HP ProLiant p-Class 刀片服务器没有扬声器,因此不支持音频输出。
如果服务器属于此类,就不用考虑音频的蜂鸣信息。
NOTE: 该指南提供了关于多种服务器模式的信息。
某些信息可能并不适用于接受故障排除处理的服务器。
欲了解有关操作步骤、硬件选件、软件工具以及服务器支持的操作系统的信息,请参阅服务器文档。
WARNING: 为了避免硬件或操作系统出现潜在问题,在拆除、更换、重新安装或修改系统组件前,必须阅读服务器文档中的警告和提示信息。
下面的ProLiant 服务器错误消息先按照字母顺序排序,然后按照数字错误代码排序。
如欲在本文中快速找到特定的错误消息,请使用web 浏览器中的查找或搜索功能。
top非数字消息或仅蜂鸣toptoptoptoptoptoptoptop。
ISO 16016 Soluzione Ready to Go 全面解决方案说明书

Copyright Protection: Confidential -ISO 16016Soluzione “Ready to Go”mega macs ONE e tablet Android TB85 completo di accessoriIl pacchetto composto dal mega macs ONE e dal tablet Android TB85fornisce tutte le funzionalitàdiagnostiche richieste dalle Officine,compreso l’accesso alla banca dati HGS Data,che include disegni tecnici,soluzioni ai problemi partendo dalla descrizione dei sintomi e guide alla riparazione per oltre 40.000modelli di veicoli.IL PACCHETTO «READY TO GO» INCLUDE:mega macs ONE e VCI Bluetooth®con 2anni di garanziaTablet TB85con Sistema operativo Android e custodia protettiva e protezione delloschermo con standard militari MIL-STD 810G Licenza conAggiornamenti, HGS Data, assistenzatelefonica,CARATTERISTICHEPRINCIPALI MEGA MACS ONE:•Il software di diagnosi completo Hella Gutmann con comunicazione wireless•risultati di diagnosi via mail in formato pdf•identificazione rapida e sicura del veicolo •visualizzazione dell'ubicazionedell'interfaccia OBD nel veicolo•compatibile a partire da Android 6.0•comunicazione (Internet, Bluetooth®) via tablet •download semplice via Google Play Store•Gestione semplice degli aggiornamenti•Compatibile su tablet con uno schermo di almeno 7 pollici•Visualizzazione adattiva (modalità orizzontale o verticale)•Funzione di registrazione parametri•Codifica e regolazione di base di tutti i sistemi •Software ADAS incluso •Accesso completo alla HGS Data (2 accessi onlineinclusi)Copyright Protection: Confidential -ISO 16016T A B L E T E A C C E S S O R I I N C L U S ICARATTERISTICHEAndroid TB85Tablet –Display 8’’ LCD colori –4 GB DDR3 –32 GB eMMC –CPU Qualcomm MSM8953 PRO Octa-Core 2.2 GHz –Risoluzione 1280 x 800 –Sistema Operativo Android 8.0 Certificato GMS –CameraFrontale 5 Megapixel –Fotocamera posteriore 13 Megapixel –Tempo ricarica batteria: meno di 4 oreSupporto mano a strappoPellicole per protezione schermoMEGA MACS ONE –READY TO GODettaglio prodotti e servizi inclusi nel pacchettoCosa comprende la licenza prevista nell’offerta?AGGIORNAMENTI Inclusi per 12 mesiHGS DATA Banca dati esterna Inclusa per 12 mesiCALL FLAT Assistenza tecnica Illimitata per 12 mesiAggiornamenti regolari scaricabili comodamenteda Internet con più veicoli, più funzioni diagnostiche, più componenti elettronici e centraline. Tutto affinché il sistema diagnostico riesca a interagire con quanti più modelli e con il massimo approfondimento di test possibile.HGS Data è una delle banche dati più aggiornate di tutto il mondo che ti fornisce l’accesso diretto ai dati e alle informazioni tecniche di oltre 35.000 modelli di veicoli, schemi elettrici, suggerimentidi riparazione e molto altro ancora.Il nostro call center tecnico fornisce supporto con mega macs nella diagnosi dei veicoli e nella ricerca guasti, ti assiste nell‘interpretazione dei dati dando supporto anche con le informazioni sui ricambi.++Per ulteriori informazioni,contattaci oppure rivolgiti al tuo riferimento HELLA GUTMANN SOLUTIONS di zona*****************-www.hellatechworld.it。
D20S06L01

© 2002, Cisco Systems, Inc. All rights reserved.
ICND v2.0—6-2
Access Lists and Their Applications
©© 2002, Cisco Systems, Inc. All rights reserved. 2002, Cisco Systems, Inc. All rights reserved.
• Standard
– Checks source address – Generally permits or denies entire protocol suite • Extended
– Checks source and destination address
– Generally permits or denies specific protocols
© 2002, Cisco Systems, Inc. All rights reserved. ICND v2.0—6-18
Summary (Cont.)
• Inbound access lists process incoming packets before they are routed to an outbound interface, while outbound access lists process packets to an outbound interface. • The Cisco IOS software executes access list statements in sequential order, so the first statement is processed, then the next, and so on. • Address filtering occurs using access list address wildcard masking to identify how to check or ignore corresponding IP address bits.
ICND210S07L02

Address Space Management
© 2007 Cisco Systems, Inc. All rights reserved.
ICND2 v1.0—7-1
IPv4 and IPv6
▪ Currently, there are approximately 1.3 billion usable IPv4 addresses available.
ICND2 v1.0—7-4
IPv6 Address Representation
Format:
▪ x:x:x:x:x:x:x:x, where x is a 16-bit hexadecimal field
– Case-insensitive for hexadecimal A, B, C, D, E, and F
▪ 0:0:0:0:0:0:0:0
::
© 2007 Cisco Systems, Inc. All rights reserved.
ICND2 v1.0—7-5
IPv6 Address Types
▪ Unicast: – Address is for a single interface – IPv6 has several types (for example, global, reserved, link-local, and site-local)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND2 v1.0—7-3
IPv6 Advanced Features
Larger address space:
▪ Global reachability and flexibility ▪ Aggregation ▪ Multihoming ▪ Autoconfiguration ▪ Plug-and-play ▪ End-to-end without NAT ▪ Renumbering
Endress+Hauser Promass 100 Coriolis Flowmeter PROF

for users regarding software updates(following the NAMUR recommendation 53)1.Type of deviceField device / signal processing deviceMonitoring- / operation system / hand held terminal etc.Modem / interfaceManufacturer:Endress+Hauser Flowtec AGDevice :CoriolisFlowmeterType :Promass 100PROFIBUS DP(0x1561) Order code :8I1B-**L*******2.FirmwarePrevious firmware version : 1.00.02New firmware version : 1.01.01How can the previous firmware version be identified? :•Local display•Nameplate for connections •Configuration and service software e.g. FieldCareDescription of themodifications incomparison to the previousfirmware version: New unit “Beer Barrel (BBL)” addedpatibilityIs the operating tool compatible with the installed device firmware?YesNo, description:An update of the DD's (device description) is required for all operating tools in use.Is a firmware update generally recommended?Yes:No, reason:If the additional properties are not required for the operation of the measurement system, then no firmware update is necessary.for users regarding software updates(following the NAMUR recommendation 53)4.Instruction manualIs a new instruction manual necessary due to the modification of the firmware?YesNoWhich manual corresponds to the new firmware?optionsManual Identification Device CommunicationPromass 100 PROFIBUS DP Operating instructions BA01251D/06/EN/02.14The new instruction manuals can be referred in Internet: - area …DOWNLOAD“- declaration of the device and kind of manual5.PriceChange in price of device in comparison with the predecessor version?Yes, new list price and update costs (without installation) are enclosedNo。
LeCroy MS-32 Oscilloscope Mixed Signal Option 快速参考
Q U I C K R E F E R E N C E G U I D E1-800-5-LeCroyFoam Lined Soft Accessory Case32 Channel Digital Logic PodOscilloscope Interface ModuleUSB 2.0 Cable10.5" Digital Lead SetPower SupplyConnecting the MS-32 hardware to your LeCroy oscilloscope is easy.Follow these simple steps:1Connect the MS-32 PowerSupply to the Digital Logic Pod and a power outlet. The “PWR”LED should be lit.2Connect the MS-32 Digital LeadSet to the Digital Logic Pod.3Connect the USB2.0 Cableto one of the oscilloscope’s PC-USB2.0 ports.4Connect the other end of theUSB2.0 Cable to the MS-32Digital Logic Pod.5Connect the MS-32 OscilloscopeInterface Module (OIM) to the EXT input of the oscilloscope.Make sure that the top (OIM labeled side) is facing up.6Connect the SMB plug fromthe OIM to the Digital Logic Pod SMB jack that is labeled TRIG OUT.7Connect the BNC plug from theOIM to the Auxiliary Output on the back of the Oscilloscope.8Connect the SMB jack from theOIM to the SMB plug on the MS-32 Digital Lead Set.12345678Standard Output ConnectionThe standard terminations on the digital lead sets can be pushed directly onto 25-mil pins. MicroGrippers may also be used to probe the test circuit’s pins. These are available from LeCroy as accessories.1Group ColorsThe 32 channels are divided into four physical groups of 8. Each group is bundled and colored. On the lead set, the plastic separator-blocks and terminators match the group color.2Line ColorsThe wires in each color group use 8 repeating colors. The color sequence is the standard resistor color code sequence.3Digital Line ConnectionConnect the Digital Leads to the digital lines you wish to observe (using accessory Microgrippers, as necessary or desired).4Ground ConnectionConnect the Digital Lead Set ground leads to the ground plane of your device under test. Use the following rules to ensure correct grounding:a. Use the shortest ground lead possible.b. Use the ground lead closest to the digital lines that ground relates to.c. If the ground plane is a pin on an IC, use the ground pin closest to the digital lines that ground relates to.Connect at least one ground lead to the test circuit’s ground. Connecting several ground leads is even better.134OverviewMS-32 trigger and digital line display tools are easily accessible in a variety of ways. The MS-32option adds additional dialogs (menus) to the exist-ing oscilloscope. These dialogs include Analog/Digital Trigger Mode selection, Digital Trigger setup, Digital Trace Group setup, and Logic Threshold setup. Two of these dialogs are shown above.When the MS-32 OIM and the Digital Logic Pod are connected to the oscilloscope, these dialogs are conveniently accessed with just one or two touches of the screen, making setup fast and easy.Digital TriggerMS-32 Oscilloscope Mixed Signal Option has a very powerful and flexible Digital trigger, but it is also very easy to set up for basic triggering. To digitally trigger, connect the MS-32 digital logic pod as described on page 2. Then, select the Digital trigger mode in the Trigger tab. Digital triggers can be set up as a Logic, Digital Trace GroupsDigital trace groups are very similar to analog channels — they can be turned ON or OFF,they can be increased in size, and they can bepositioned on the grid. You can also store them as waveform files. In software, they are accessed through the same Vertical menu as analogChannels. Cursors and some timing measurements work with Digital traces.However, Digital trace groups have capability far beyond that of an analog channel. Each Digital trace group can consist of 1-32 digital lines. You can create up to 4 Digital trace groups, and each digital line can be used in as many or as few groups as desired. You can choose to display the group of digital lines as individual digital traces (one per line), or as a “collapsed” bus with bus data values calculated on screen within the bus trace.Digital Trigger SetupDigital Trace Group Setupusing the front panel vertical zoom controls (WaveRunner,or channel controls (WaveSurferDisplaying Digital Information in a Bus ViewTriggering & Signal Time AlignmentIf your trigger condition occurs infrequently (approximately < 1 Hz), you may observe in AUTO trigger mode a non-triggered intermediate acquisition where digital and analog signals are not time-aligned. Switch to “NORMAL” or“SINGLE” to have only triggered (and thus time-aligned) acquisitions displayed.Setting MemoryThe MS-32 option has 1 Mpts/Ch of digital memory. If you wish,all this memory can be 100% pre-trigger,100% post-trigger,or something in between.Optimize your Memory Length by accessing the Horizontal Dialog in your oscilloscope and selecting as follows:•WaveRunner, WavePro, WaveMaster — Set Max Memory mode or Fixed Sample Rate mode.•WaveSurfer — choose a Max Number of Sample Points Make sure to use enough memory to maintain the desired sample rate, or your analog and digital signals may not be acquired accurately.Zooming Analog and Digital DataThere are a number of ways to zoom a mix of analog and digital signals.The easiest method to zoom everything is to STOP the acquisition and then simply adjust the timebase Time/Div and Delay knobs on the front panel. Use the Time/Div knob to change the zoom ratio, and the Delay knob to change the position.You can also zoom up to 4 analog channel or digital trace groups by drawing a box with a mouse pointer around the area you wish to zoom, then follow the on-screen instructions. Reference the MS-32 Operator’sManual for more detail on this method.WaveRunner, WavePro, and WaveMaster Series SMARTMemory SetupTurn on and define a Digital trace from the Vertical menu.Descriptor labels allow quick access to dialogs.Touch them to open the dialog specific to that descriptor label.The Digital trigger can be set up fromwithin the Trigger dialog. Touch the Trigger descriptor label, select Digital Trigger Mode to display the Digital Trigger tab, and then touch the Digital Trigger tab. You can also access the Trigger dialog from the menu bar.The Timebase dialog can be used to adjust thememory for the oscilloscope. Touch the Timebase descriptor label to open the dialog. Use a sampling value at least 4x the clock frequency.Add cursors to your display by touching thisarea and selecting the appropriate cursors.Adjust cursor position with the front panel knobs. Cursor data for digital and analog traces is in the descriptor boxes and the bottom right of the display.Add measurement parameters by touching thisarea. Or, touch the MEASURE button in the toolbar of the Digital trace dialogs.A descriptor label with a different color back-ground indicates that this trace is “active.” If it is a Digital trace, and is “active,” the front panel zoom controls (on WaveRunner,WavePro,and WaveMaster) will resize and position that particular digital trace. On WaveSurfer, the Vertical gain and position knobs will resize and position that particular digital trace.Escape from the MS-32 dialogs at any timeto add math, measurement parameters, or to make changes to your setup. Re-enter through the descriptor labels for Digital traces, or via the menu bar.The digital information obtained by viewingparallel ADDR or DATA bus information can be defined as a bus. By collapsing multiple digital lines into one bus display, users can define a digital trigger for a particular bus value. Up to four different buses can be defined.Reposition and resize Digital trace groups withthe zoom vertical controls (WaveRunner,WavePro, and WaveMaster) or the Vertical Gain and Offset controls (WaveSurfer); or,access the Zoom dialog by touching here.1234569107812345697858910。
Reliable Networks Sincere Service Technical Note 1

How to Connect the ioLogik E1200 to an Allen-Bradley PLCThe purpose of this note is to provide a step-by-step example of how to connect the ioLogik E1200 series device with an Allen-Bradley PLC by EtherNet/IP protocol. In this example, the Allen-Bradley PLC is the EtherNet/IP Scanner and the ioLogik E1200 is the adapter. The system architecture is displayed below. There are two sections in this document. The first section explains how to install the ioLogik E1200 series’ EDS files in the RSLogix 5000, and the second section explains how to connect the ioLogik E1200 with the Allen-Bradley PLC.EDS Installation for ioLogik E1200 series in Rockwell Software RSLogix 50001. Start the RSLogix 5000 and open the EDS Hardware Installation Tool in Tools EDS Hardware Installation Tool.2. The wizard will start and the following window will pop out, click Next and then select Register an EDS file(s), followed by Next.3. There are two ways to register the EDS files. The first is to register a single file, and the second is to register the EDS files by a folder.A. If you want to register one EDS file, select Register a single file and then click Browse.B. If you want to register several EDS files, put all the EDS files in one folder, select Register a directory of EDS files and then click Browse.4. Select EDS files and click Open, then it will go back to the wizard. Please click Next to finish the EDS file selection.A. Single EDS fileB. Select EDS file folder5. The EDS Wizard will evaluate the EDS file you selected and display the result, then click Next . In the followingwindow, you can change the device image. If you do not intend to change the image, please click Next .A. Single EDS fileB. EDS files folder6. Complete the final step of the EDS Wizard by clicking Next and then Finish.A. Single EDS fileB. EDS files folderEstablishing communication between the ioLogik E1200 device and the Allen-Bradley PLC1. Open the RSLogix 5000 and then open a new project by pressing File New.2. Select your PLC model under Type and key in the project name in the window.The CompactLogix5324ER-QBFC1B will be used as an example.3. After the project creation, you can see the project information in the left window. Right click Ethernet and then select New Module and the ioLogik E1200 module can be added into the project.4. In the Select Module Type window, choose the ioLogik E1200 model you want to add. You can use a key word and select the module type to speed up the search. The ioLogik E1212 is used here as an example.5. In the New Module window, key in the module name and module IP. The default module definition is Exclusive Owner. If you want to change it, click change and then choose another type.6. Key in the Requested Packet Interval settings on the connection panel. To avoid an I/O connection timeout, we recommend setting the requested packet interval (RPI) value for the ioLogik E1200 Series to a number greater than or equal to 100 ms..NOTE: The ioLogik E1200 Series is mainly used for data acquisition and remote monitoring, such as recording the ambient temperature and monitoring machine status. The optimal request packet interval (RPI) setting for the ioLogik E1200 Series is 100 ms, which is suitable for the above data acquisition and monitoring requirements.7.RSLogix 5000 will recognize and create the ioLogik E1212 tags automatically. You can check the tag structure in the window.8.To download the tag structure to the Allen-Bradley PLC, please go to Communications Who Active to select the active PLC.9.Select the PLC in Who Active and then click the Go Online, followed by Download. The RSLogix 5000 will display a pop up message to inform you the download is complete.10.Change the ioLogik_E1212.O.Data[0].4 status from 0 to 1 in RSLogix 5000 and the DO-04 status will change from OFF to ON. The ioLogik E1200 will now be successfully connected to the Allen-Bradley PLC.© 2020 Moxa Inc. All rights reserved.The MOXA logo is a registered trademark of Moxa Inc. All other logos appearing in this document are the intellectual property of the respective company, product, or organization associated with the logo.。
Win10蓝屏提示一大串英文如何解决

Win10蓝屏提示一大串英文如何解决
电脑蓝屏是经常使用电脑的朋友经常会遇到的电脑故障,正是由于电脑蓝屏是一种非常普遍的现象,所以很难有预见性,是一种偶然发生的事件,而最近有很多小伙伴反映Win10蓝屏提示一大串英文“INACCESSIBLE_BOOT_DEVICE”,遇到这种情况我们具体该怎么解决呢?下面就由店铺跟大家分享一下解决方法吧,欢迎大家来阅读学习。
Win10蓝屏提示一大串英文解决方法
WIN10出现的蓝屏,INACCESSIBLE_BOOT_DEVICE,开不了机。
出现上面的提示后,不操作,等电脑自动重启,然后会提示正在尝试修复,然后弹出下面的界面,点高级选项。
然后会出现三个选项,选疑难解答。
出现六个选项,选启动设置。
然后点重启。
进系统后,在任务栏右键进入任务管理器,点到启动选项,把所有的显卡开机启动项禁用,我的是N卡,把所有NVIDIA开头的禁掉,重启就正常了。
服装品牌:Seagate 产品:Mobile USB硬盘 型号:电子产品说明书
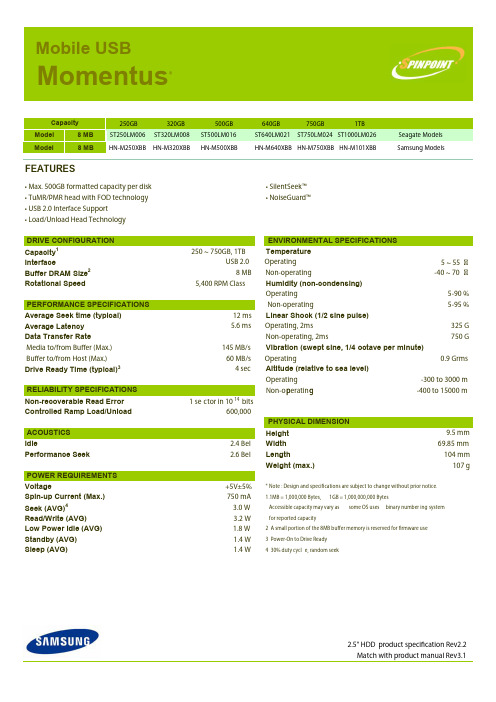
Mobile USBMomentus®250GB 320GB 500GB 640GB 750GB 1TBModel 8 MB ST250LM006 ST320LM008ST500LM016ST640LM021ST750LM024ST1000LM026Seagate ModelsFEATURES• Max. 500GB formatted capacity per disk • SilentSeek™ • TuMR/PMR head with FOD technology • NoiseGuard™• USB 2.0 Interface Support • Load/Unload Head Technology Capacity 1250 ~ 750GB, 1TBTemperature InterfaceUSB 2.0 Operating 5 ~ 55 Buffer DRAM Size 28 MBNon-operating -40 ~ 70 Rotational Speed5,400 RPM ClassHumidity (non-condensing)Operating 5-90 % Non-operating 5-95 %Average Seek time (typical)12 msLinear Shock (1/2 sine pulse)Average Latency 5.6 ms Operating, 2ms 325 G Data Transfer RateNon-operating, 2ms 750 G Media to/from Bu er (Max.)145 MB/s Vibration (swept sine, 1/4 octave per minute) Bu er to/from Host (Max.)60 MB/s Operating 0.9 Grms Drive Ready Time (typical)3 4 secAltitude (relative to sea level)Operating -300 to 3000 m Non-operating -400 to 15000 m Capacity DRIVE CONFIGURATION ENVIRONMENTAL SPECIFICATIONSPERFORMANCE SPECIFICATIONS RELIABILITY SPECIFICATIONS p gNon-recoverable Read Error 1 se ctor in 1014bitsControlled Ramp Load/Unload 600,000Height 9.5 mm Idle2.4 Bel Width 69.85 mm Performance Seek 2.6 BelLength104 mm Weight (max.)107 gVoltage+5V±5%* Note : Design and speci cations are subject to change without prior notice.Spin-up Current (Max.) 750 mA 1.1MB = 1,000,000 Bytes,1GB = 1,000,000,000 BytesSeek (AVG)43.0 W Accessible capacity may vary as some OS uses binary number ing systemRead/Write (AVG)3.2 W for reported capacityLow Power Idle (AVG) 1.8 W 2 A small portion of the 8MB bu er memory is reserved for rmware use Standby (AVG) 1.4 W 3 Power-On to Drive Ready Sleep (AVG)1.4 W4 30% duty cycl e, random seek2.5" HDD product speci cation Rev2.2 Match with product manual Rev3.1POWER REQUIREMENTS ACOUSTICS PHYSICAL DIMENSION Model8 MBHN-M250XBBHN-M320XBBHN-M500XBBHN-M640XBB HN-M750XBB HN-M101XBB Samsung Models。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ICND1 v1.0—1-6
ARP
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-7
ARP Table
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-13
Host-to-Host Packet Delivery (6 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-14
Host-to-Host Packet Delivery (7 of 22)
– Ethernet – Serial – Repeater – Physical interface of the NIC
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-2
Layer 2 Devices
▪ Layer 2 devices provide an interface with the physical media. ▪ Examples:
ICND1 v1.0—1-23
Host-to-Host Packet Delivery (16 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-24
Host-to-Host Packet Delivery (17 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-30
Default Gateway
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-31
Host-Based Tools: ping
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-25
Host-to-Host Packet Delivery (18 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-26
between hosts: – ping – tracert – arp
© 2007 Cisco Systems, Inc. All rights reserved.
ห้องสมุดไป่ตู้
ICND1 v1.0—1-38
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-39
ICND1 v1.0—1-8
Host-to-Host Packet Delivery (1 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-9
Host-to-Host Packet Delivery (2 of 22)
Exploring the Packet Delivery Process
Building a Simple Network
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-1
Layer 1 Devices
▪ Layer 1 provides the physical media and its encoding. ▪ Examples:
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-35
Summary
▪ Layer 1 provides the physical media and its encoding. ▪ Layer 2 devices provide an interface with the physical media. ▪ Layer 2 addresses are MAC addresses. ▪ The network layer provides connectivity and path selection
▪ In the router, it is the actual path across the network.
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-5
Layer 3 Addressing
▪ Each NOS has its own Layer 3 address format. ▪ OSI uses an NSAP. ▪ TCP/IP uses IP.
Host-to-Host Packet Delivery (19 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-27
Host-to-Host Packet Delivery (20 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-18
Host-to-Host Packet Delivery (11 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-19
Host-to-Host Packet Delivery (12 of 22)
between two host systems. ▪ Layer 3 addresses are IP addresses.
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-37
Summary (Cont.)
▪ Before a host can send data to another host, it must have the MAC address of that host.
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-10
Host-to-Host Packet Delivery (3 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-11
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-20
Host-to-Host Packet Delivery (13 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-21
Host-to-Host Packet Delivery (14 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-22
Host-to-Host Packet Delivery (15 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
▪ If the MAC address is not known, ARP is used to map Layer 2 to Layer 3.
▪ Reliable communication requires a TCP session. ▪ Data sent must be acknowledged. ▪ If hosts are on different segments, a default gateway is needed. ▪ Several host-based tools are available to check connectivity
ICND1 v1.0—1-4
Layer 3 Devices and Their Function
▪ The network layer provides connectivity and path selection between two host systems.
▪ In the host, this is the path between the data link layer and the upper layers of the NOS.
Host-to-Host Packet Delivery (4 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-12
Host-to-Host Packet Delivery (5 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-28
Host-to-Host Packet Delivery (21 of 22)
© 2007 Cisco Systems, Inc. All rights reserved.
ICND1 v1.0—1-29