基于电感传感器的自动循迹小车系统设计
毕业设计基于图像传感器的自动循迹智能车
系统软件流程图
软件的开发工具和系统的调试
• 1.CodewarriorV4.7软件及其应用 • Codewarrior软件是Metrowerks公司开发的软件集 成开发环境及IDE(intergrated develop inviroment),Freescale的单片机都可以在 codewarior IDE软件下进行开发,codewarrior IDE 为软件开发提供了一系列的工具
智能车系统的分析
• 1.系统模型总体框图
• 2.系统控制电源模块分析
• 3.系统软件模块的分析
• 从该结构图中可以看出,系统的软件模块主要有: • 1. 单片机系统的初始化,包括单片机系统时钟的初始化、 ATD模块的初始化、PWM模块的初始化、增强型时钟模 块的初始化,还有一些输入输出口的初始化; • 2. 图像信号的采集:通过对图像信号波形的学习,根据图 像信号的特点,采集有效图像信号; • 3. 图像信号的处理:将采集到的信号存储在单片机中,通 过对图像信号的分析和判断来识别路径,判断黑线中间位 置,判断道路是直线还是曲线,以及通过计算判断出曲线 的斜率,从而进一步的控制舵机的转角和驱动电机的转速。 • 4. 舵机转角的控制和电机转速的控制:通过控制PWM口 的信号输出可以实现对舵机转角和轮速的控制
研究课题:基于图像传感器的自 动循迹智能车系统设置
指导老师: 学生: 专业:车辆工程
智能车概述
• 智能车是一种轮式移动机器人,它能够自主进行路径识别、 决策规划以选择最佳的行驶状态,智能车集中运用了自动 控制、传感器技术、汽车电子、电气、计算机、机械等多 个学科的知识。随着控制技术、计算机技术和信息技术的 发展,智能车在工业生产和日常生活中已扮演了非常重要 的角色。车辆智能化是汽车工业今后的发展趋势,也是人 们对安全性、智能化要求越来越高未来汽车的发展方向。 随着计算机技术和信息技术为代表的高新技术的发展,智 能车辆技术的研究将会有突破性的进展。智能车辆系统的 实用化是智能车辆发展的前进方向,适应性强、环境适应 性好的智能车辆将是研究的重点。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着人工智能与自动控制技术的快速发展,智能小车已经广泛应用于各种领域,如物流配送、环境监测、智能家居等。
本文将详细介绍一种自循迹智能小车控制系统的设计与实现过程,该系统能够根据预设路径实现自主循迹、避障及精确控制。
二、系统设计(一)系统概述自循迹智能小车控制系统主要由控制系统硬件、传感器模块、电机驱动模块等组成。
其中,控制系统硬件采用高性能单片机或微处理器作为主控芯片,实现对小车的控制。
传感器模块包括超声波测距传感器、红外线测距传感器等,用于感知周围环境并实时传输数据给主控芯片。
电机驱动模块负责驱动小车行驶。
(二)硬件设计1. 主控芯片:采用高性能单片机或微处理器,具备高精度计算能力、实时响应和良好的可扩展性。
2. 传感器模块:包括超声波测距传感器和红外线测距传感器。
超声波测距传感器用于测量小车与障碍物之间的距离,红外线测距传感器用于检测小车行驶路径上的标志线。
3. 电机驱动模块:采用直流电机和电机驱动器,实现对小车的精确控制。
4. 电源模块:为整个系统提供稳定的电源供应。
(三)软件设计1. 控制系统软件采用模块化设计,包括主控程序、传感器数据处理程序、电机控制程序等。
2. 主控程序负责整个系统的协调与控制,根据传感器数据实时调整小车的行驶状态。
3. 传感器数据处理程序负责对传感器数据进行处理和分析,包括距离测量、方向判断等。
4. 电机控制程序根据主控程序的指令,控制电机的运转,实现小车的精确控制。
(四)系统实现根据设计需求,通过电路设计与焊接、传感器模块的安装与调试、电机驱动模块的安装与调试等步骤,完成自循迹智能小车控制系统的硬件实现。
在软件方面,编写各模块的程序代码,并进行调试与优化,确保系统能够正常运行并实现预期功能。
三、系统功能实现及测试(一)自循迹功能实现自循迹功能通过红外线测距传感器实现。
当小车行驶时,红外线测距传感器不断检测地面上的标志线,并根据检测结果调整小车的行驶方向,使小车始终沿着预设路径行驶。
基于光电传感器自动循迹小车设计

基于光电传感器自动循迹小车设计The Standardization Office was revised on the afternoon of December 13, 2020摘要制作自动寻迹小车所涉及的专业知识包括控制、模式识别、传感技术、汽车电子、电气、计算机、机械等诸多学科。
为了使小车能够快速稳定的行驶,设计制作了小车控制系统。
在整个小车控制系统中,如何准确地识别路径及实时地对智能车的速度和方向进行控制是整个控制系统的关键。
由于此小车能够自动寻迹,加速,减速.故又被称作为智能车.本智能车控制系统设计以MC9S12XS128微控制器为核心,通过两排光电传感器检测小车的位置和运动方向来获取轨道信息,根据轨道信息判断出相应的轨道类型,并分配不同的速度给硬件电路加以控制,完成了在变负荷条件下对速度的快速稳定调节。
红外对射传感器用于检测智能车的速度,以脉宽调制控制方式(PWM)控制电机和舵机以达到控制智能车的行驶速度和偏转方向。
软件是在CodeWarrior 的环境下用C语言编写的,用PID控制算法调节驱动电机的转速和舵机的方向,完成对模型车运动速度和运动方向的闭环控制。
智能车能够准确迅速地识别特定的轨道,并沿着引导线以较高的速度稳定行驶。
整个智能车系统涉及车模机械结构的改装、传感器电路设计及控制算法等多个方面。
经过多次反复的测试,最终确定了现有的智能车模型和各项控制参数。
关键词:MC9S12XS128;PID;PWM;光电传感器;智能车ABSTRACTMaking automatic tracing car involved the professional knowledge including control, pattern recognition, sensing technology, automobile electronics, electrical, computer, machinery and so on many subjects. According to the technical requirements of the contest, we design the intelligent vehicle control system. In the entire control system of the smart car, how to accurately identify the road and real-time control the speed and direction of the Smart Car is the key to the whole control system.Because this car can automatic tracing, accelerate, slowing down. So it is also known as intelligent car this intelligent vehicle control system design take theMC9S12XS128 micro controller as a core, examines car's position and the heading through two row of photoelectric sensors gains the racecourse information, judges the corresponding racecourse type according to the racecourse information, and assigned the different speed to control for the hardware circuit, has completed in changes under the load condition to the speed fast stable adjustment. The infrared correlation sensor uses in examining the intelligent vehicle's speed, (PWM) controls the electrical machinery and the servo by the pulse-duration modulation control mode achieves the control intelligence vehicle's moving velocity and the deflection direction.The software is under the CodeWarrior environment with the C language compilation, actuates electrical machinery's rotational speed and servo's direction with the PID control algorithm adjustment, completes to the model vehicle velocity of movement and the heading closed-loop control. The intelligent vehicle can distinguish the specific racecourse rapidly accurately, and along inlet line by the high speed control travel.The entire intelligent vehicle system involves the vehicle mold mechanism the re-equipping, the sensor circuit design and the control algorithm and so on many aspects. After the repeated test, has determined the existing intelligent vehicle model and each controlled variable finally many times.Keywords:MC9S12XS128; PID;PWM;photoelectric sensor; smart car目录第一章绪论..................... 错误!未定义书签。
基于光电传感器自动循迹的智能车系统设计

第一章绪论1.1智能小车的意义和作用自第一台工业机器人诞生以来,机器人的开展已经普及机械、电子、冶金、交通、宇航、国防等领域。
近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。
人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。
随着科学技术的开展,机器人的感觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。
视觉的典型应用领域为自主式智能导航系统,对于视觉的各种技术而言图像处理技术已相当兴旺,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些构造化环境简单的目标。
视觉传感器的核心器件是摄像管或CCD,目前的CCD已能做到自动聚焦。
但CCD传感器的价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉的系统中考虑使用接近觉传感器是一种实用有效的方法。
机器人要实现自动导引功能和避障功能就必须要感知导引线和障碍物,感知导引线相当给机器人一个视觉功能。
避障控制系统是基于自动导引小车〔AVG—auto-guide vehicle〕系统,基于它的智能小车实现自动识别路线,判断并自动避开障碍,选择正确的行进路线。
使用传感器感知路线和障碍并作出判断和相应的执行动作。
该智能小车可以作为机器人的典型代表。
它可以分为三大组成局部:传感器检测局部、执行局部、CPU。
机器人要实现自动避障功能,还可以扩展循迹等功能,感知导引线和障碍物。
可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。
基于上述要求,传感检测局部考虑到小车一般不需要感知清晰的图像,只要求粗略感知即可,所以可以舍弃昂贵的CCD传感器而考虑使用价廉物美的红外反射式传感器来充当。
智能小车的执行局部,是由直流电机来充当的,主要控制小车的行进方向和速度。
单片机驱动直流电机一般有两种方案:第一,勿需占用单片机资源,直接选择有PWM功能的单片机,这样可以实现准确调速;第二,可以由软件模拟PWM输出调制,需要占用单片机资源,难以准确调速,但单片机型号的选择余地较大。
自动循迹小车毕业设计

自动循迹小车毕业设计毕业设计:自动循迹小车摘要:本毕业设计致力于设计和制作一种自动循迹小车。
该小车能够在给定的路径上自动行驶,并根据环境中的线路进行循迹操作。
设计方案基于Arduino控制器和红外传感器实现,小车能够感知到路径上的线路,并据此进行正确的行驶操作。
此外,设计还包括电机驱动,电源供应和用户界面等功能模块。
实验结果表明,该自动循迹小车能够高效准确地行驶在指定的路径上。
关键词:1.引言2.设计原理自动循迹小车的设计方案基于Arduino控制器和红外传感器。
红外传感器能够感知到路径上的线路,从而确定小车的行驶方向。
Arduino控制器能够接收传感器的数据并根据预先编写的程序进行控制操作,例如调整电机速度和方向等。
整个设计系统的模块主要包括传感器模块,控制器模块,电机驱动模块和电源供应模块。
3.系统设计3.1传感器模块本设计中使用红外传感器来感知路径上的线路。
传感器模块负责采集红外传感器的数据,并将其传输给控制器模块进行处理。
3.2控制器模块控制器模块由Arduino控制器组成。
它通过连接传感器模块和电机驱动模块来接收传感器数据,并根据编写的程序进行控制操作。
控制器模块具有高度灵活性和可编程性,使得小车能够按照预先设定的规则行驶。
3.3电机驱动模块电机驱动模块负责控制小车的速度和方向。
根据传感器数据,控制器模块会发送相应的指令给电机驱动模块,以控制小车的行驶。
3.4电源供应模块电源供应模块为整个系统提供所需的电力。
它负责将来自电池或电源适配器的直流电源转换为小车所需的电压和电流。
4.实验结果和讨论通过设置合适的传感器感应距离,测试了自动循迹小车在给定路径上的行驶性能。
实验结果表明,该小车能够稳定地沿着给定的路径行驶,并根据环境中的线路进行循迹操作。
5.结论本毕业设计成功地设计和制作了一种自动循迹小车。
该小车能够准确地沿着给定的路径行驶,并根据环境中的线路进行循迹操作。
通过这个设计,我们可以更深入地理解自动控制和传感器应用的原理和实践。
自动循迹小车方案论文 附程序

一、设计任务多功能寻迹小车的主要功能就是按给定的黑线自动行走,并通过霍尔传感器测量小车行走时的速度,用LCD12864显示出来,可以通过电机驱动芯片控制小车的速度。
设计这个寻迹小车的目的在于学习和实践,把学到的知识应用于实践。
二、设计要求1、硬件要求:(1)、小车寻迹电路图1 黑白线检测电路该电路运用了传感器技术,用反射型TCR来检测地面上的黑白线,该元件在小车运行开始就一直发出红外光,红外光照射到地面。
如果没遇到黑线,红外线就会反射回来给光电三极管,从而使光电三极管导通,然后低电平就会送到比较器的反向输入端,而正向输入端的电压是可调的,当正向电压比反向电压高时,比较器就会输出一个高电压,反之,是低电压。
我们就是应用这一点来通过看LED信号灯来看是否检测到黑线,所以LED指示灯亮是告诉我们小车检测到黑线。
图2 霍尔传感器的接线图霍尔传感器测量原理:测量电机转速的第一步就是要将电机的转速表示为单片机可以识别的脉冲信号,从而进行脉冲计数。
霍尔器件作为一种转速测量系统的传感器,它有结构牢固、体积小、重量轻、寿命长、安装方便等优点,因此选用霍尔传感器检测脉冲信号,其基本的测量原理如图2-6所示,当电机转动时,带动传感器运动,产生对应频率的脉冲信号,经过信号处理后输出到计数器或其他的脉冲计数装置,进行转速的测量。
图3 霍尔传感器测速原理图4 电机驱动电路该图是用来驱动小车左右电机的驱动电路,通过IN1、IN2、IN3、IN4这4个输入端的设计来实现小车的前、后、左、右运行,用该芯片的最大优点就是控制电路简单,成本低。
图5 L298N电机驱动芯片图6 电源电路该电路可以有效地为系统提供5V电压,有2个指示灯,一个用来指示单片机的通信状态,另一个用来指示电源工作状态。
2、软件要求(1)、编写检测寻迹函数(2)、编写测速函数(3)、编写电机驱动函数(4)、编写电机调速函数(5)、编写LCD12864显示函数3、联机调试先测试硬件是否按要求做好,先接上电源,看每个模块是否可以正常工作,如果不行就通过万能表检测,直到硬件方面完全没问题的时候就检测软件。
毕业设计---基于光电传感器的自动循迹智能车系统设计
摘要新一代汽车研究与开发将集中表现在信息技术、微电子技术、计算机技术、智能自动化技术、人工智能技术、网络技术、通信技术在汽车上的应用。
智能汽车是是现代汽车发展的方向。
大学生智能车比赛是智能汽车设计的一个实践平台,光电传感器的自动循迹智能车系统,采用光电传感器作为道路信息的采集传感器,单片机为控制系统的核心来处理信号和控制小车行驶。
MC9S12系列单片机在汽车电子控制领域得到广泛应用。
本课题就是利用Freescale的MC9S12XS128微控制器对智能车系统进行设计。
智能车系统设计包括硬件电路和控制软件系统的设计。
硬件系统使用专门软件Altium Designer设计。
硬件电路系统主要包括freescale单片机最小系统、电源管理系统、路径识别与检测系统、电机驱动系统。
而控制系统软件的设计主要包括单片机的初始化、PID控制算法、路径识别算法、舵机控制算法、速度控制算法。
软件设计是用Freescale公司的Codewarrior软件作为软件开发和仿真下载的平台。
最后完成了整个自动循迹智能车系统设计。
关键字:智能车;光电传感器;自动循迹;控制算法;PID;I基于光电传感器的自动循迹智能车系统设计ABSTRACTThe design of autoguiding smartcar system based onphotoelectric sensorN ew generation automobile development and researched focus on information technology, microelectronic technology, computer technology, intelligent automation technology, artificial intelligence technology, networking technology, communication technology and so on. The intelligent automobile is the direction in which the modern automobile developed.The university students intelligence vehicle competition is a practice platform in which intelligence automobile designed , we use the photoelectric sensor as gathering sensor to take path information , The microcontroller is used as the control system core ,and process the signal, and controls car to run . signal-chip microcomputer MC9S12 series be widespread utilized in the automobile electronic control domain. I use the Freescale microcontroller MC9S12XS128 to design the intelligent vehicle system. The design of intelligent vehicle system including hardware circuit and control software system. I adopt the software of electronics design Altium Designer to complete designing the hardware . Hardware circuit system mainly includes the freescale ’s Single-chip Microcomputer smallest system, the power source management system , the way recognition and the detecting system, the motor-driven system. But the control software system mainly includes Single-chip Microcomputer 's initialization, the PID control algorithm, the way recognition algorithm, the steering engine control algorithm, the speed control algorithm . It uses Freescale Corporation's Codewarrior as the software development ,the simulation and downloading…s platform in the software designing . Finally The design of auto track smartcar system based on photoelectric sensor is completed.Key words: Intelligent vehicle; photoelectric Sensor; auto track; Control algorithm ;PID;II摘要 (I)ABSTRACT ........................................................................................................................ I I 插图清单 (I)第1章绪论................................................................................................................. - 1 -1.1 毕业设计(论文)内容及研究意义(价值)............................................. - 1 -1.2 毕业设计(论文)研究现状和发展趋势..................................................... - 2 -第2章控制系统整体方案设计................................................................................... - 3 -2.1 整体设计方案概述........................................................................................... - 3 -2.2 控制系统整体方案设计................................................................................. - 4 -2.2.1 模型车硬件整体方案设计...................................................................... - 4 -2.2.2 系统软件模块分析 ................................................................................. - 7 -2.2.3 控制算法设计方案 ................................................................................. - 8 -第3章单片机最小系统模块....................................................................................... - 9 -3.1 单片机以及最小系统简介............................................................................... - 9 -3.2 MC9S12XS128最小系统设计 ...................................................................... - 9 - 第4章电源管理模块................................................................................................. - 11 -第5章路径识别模块和测速检测模块..................................................................... - 13 -5.1 路径识别模块................................................................................................. - 13 -5.1.1 光电传感器 ........................................................................................... - 13 -5.1.2 光电传感器发射与接收电路设计 ....................................................... - 13 -5.1.3 路径识别传感器布局设计 ................................................................... - 14 -5.2 测速检测模块 .......................................................................................... - 16 -第6章电机驱动模块................................................................................................. - 19 -6.1 直流电机驱动模块......................................................................................... - 19 -6.1.1 电机的工作原理 ................................................................................... - 19 -6.1.2 MC33886介绍....................................................................................... - 21 -6.1.3 PWM信号控制电机的转速.................................................................. - 22 -6.2 舵机驱动模块............................................................................................... - 23 -第7章智能车软件的设计......................................................................................... - 29 -7.1 单片机初始化................................................................................................. - 30 -7.2 PID控制算法 ............................................................................................... - 32 -7.3 路径识别算法............................................................................................... - 34 -7.4 舵机控制算法............................................................................................... - 34 -7.5 速度控制算法............................................................................................... - 36 -I基于光电传感器的自动循迹智能车系统设计第8章开发制作与调试............................................................................................. - 38 -8.1 CodewarriorV4.7软件及其应用.................................................................. - 38 -8.2 BDM for S12的使用.................................................................................... - 43 -结论和展望................................................................................................................... - 44 - 致谢........................................................................................................................... - 45 - 参考文献....................................................................................................................... - 46 - 主要参考文献摘要....................................................................................................... - 48 - 附录A ........................................................................................................................... - 50 -II插图清单图2-1 系统信息的控制流程图....................................... - 4 - 图2-2 智能车控制系统整体结构图................................... - 5 - 图2-3 系统硬件结构图............................................. - 6 - 图2-4 系统软件结构............................................... - 7 - 图3-1 最小系统原理图和PCB图.................................... - 10 - 图4-1 电源系统结构框图.......................................... - 11 - 图4-2 LM7805电路图.............................................. - 12 - 图4-3 LM7806电路图.............................................. - 12 - 图5-1 光电传感器的基本组成...................................... - 13 - 图5-2 单对红外传感器电路图...................................... - 14 - 图5-3 红外探测布局的PCB图...................................... - 16 - 图5-4 霍尔原理.................................................. - 17 - 图5-5 霍尔测速电路图............................................ - 18 - 图6-1 H桥式电机驱动电路......................................... - 20 - 图6-2 H桥电路驱动电机顺时针转动................................. - 20 - 图6-3 H桥电路驱动电机逆时针转动................................. - 21 - 图6-4 MC33886电机驱动原理图..................................... - 22 - 图6-5 舵机工作原理示意图........................................ - 24 - 图6-6 舵机输出转角与控制信号脉宽之间关系........................ - 25 - 图6-7 不同占空比的PWM波形控制的转向伺服电机状态图.............. - 26 - 图6-8 转向伺服电机控制方法图.................................... - 27 - 图6-9 舵机转角控制模块程序流程图................................ - 28 - 图7-1 光电传感器方案主程序流程图................................ - 29 - 图7-2 典型PID控制结构.......................................... - 33 - 图7-3 舵机控制流程图............................................ - 35 - 图7-4 速度控制流程图............................................ - 37 - 图8-1 CodearrierV4.7 创建新的工程窗口........................... - 40 - 图8-2 CodearrierV4.7的工程的初始设置窗口........................ - 41 - 图8-3 CodearrierV4.7的编译窗口.................................. - 42 -图8-4 BDM的PCB原理图........................................... - 43 -I第1章绪论自动循迹智能车是一个集环境感知、规划决策、自动驾驶等多种功能于一体的综合系统。
智能寻迹小车设计方案

智能寻迹小车设计方案智能寻迹小车设计方案一、项目概述智能寻迹小车是一种能够自主行走并根据黑线路径进行导航的小型机器人。
本设计方案旨在实现小车的自主控制和路径识别功能,为用户提供一个可以根据预定路径行走的智能小车。
二、技术原理智能寻迹小车的核心技术包括光电传感器模块、控制模块和驱动模块。
光电传感器模块用于感知黑线路径,控制模块用于辨识路径信号并控制小车的行走方向,驱动模块用于控制小车的轮子转动。
小车通过光电传感器模块获取黑线路径的信号,经过控制模块的处理后,驱动模块控制轮子的转动实现小车的行走。
三、硬件配置1. 光电传感器:用于感知黑线路径,采用多个红外线光电二极管和光敏二极管进行测量。
2. 控制模块:采用单片机作为控制核心,用于接收和处理光电传感器的信号,并根据信号控制车轮转动。
3. 驱动模块:采用直流电机作为驱动装置,驱动车轮的转动。
四、软件架构1. 信号处理算法:根据光电传感器模块的输出信号,设计信号处理算法,将感知到的黑线路径转化成可识别的控制信号。
2. 路径识别算法:分析感知到的黑线路径信号,识别出黑线的走向,并根据识别结果控制小车的行走方向。
3. 控制算法:根据路径识别算法的结果,控制驱动模块产生适当的电压,实现小车轮子的转动。
五、功能实现1. 自主行走功能:小车能够根据识别的黑线路径自主地行走,避免碰撞障碍物或偏离路径。
2. 路径识别功能:小车能够准确地识别黑线路径,并根据路径进行相应的控制。
3. 远程控制功能:用户可以通过无线遥控器对小车进行远程控制,包括行走方向和速度的控制。
六、性能指标1. 导航准确性:小车在正确识别黑线路径的情况下完成整个行程,保持在路径上的偏离范围小于5mm。
2. 响应速度:小车对路径信号的处理和控制反应时间小于100ms。
3. 可靠性:小车在连续行走1小时内不发生故障,并能正常完成指定的行走任务。
七、安全性考虑1. 碰撞检测:小车装配超声波传感器,能够检测前方的障碍物并自动停止行走,避免碰撞事故的发生。
循迹小车方案设计
循迹小车方案设计一、引言在计算机视觉和机器人技术领域,循迹小车是一个常见的项目。
循迹小车可以通过使用光电传感器或摄像头等传感器来感知黑色或白色的轨迹,并根据轨迹的方向进行自动导航。
本文将介绍一个循迹小车的方案设计,包括硬件和软件的部分。
二、硬件设计1. 选择电机和轮子循迹小车需要一个电机驱动系统来控制它的运动。
我们可以选择直流电机和合适的轮子来实现小车的移动。
电机的选择应该根据小车的负载和速度要求来做出决策。
2. 选择传感器循迹小车需要传感器来感知轨迹上的黑色或白色区域。
常用的传感器是光电传感器和摄像头。
光电传感器通过发射红外线并接收反射的红外线来感知颜色,摄像头则可以通过图像处理算法来感知颜色。
3. 选择控制器循迹小车需要一个控制器来控制电机和传感器之间的通信。
可以选择单片机、嵌入式开发板或者微控制器来实现控制器功能。
4. 连接电路在硬件设计中,需要将电机、传感器和控制器相互连接。
根据选择的电机和传感器,可以设计相应的电路板来实现连接功能。
三、软件设计1. 数据采集在软件设计中,需要编写代码来采集传感器的数据。
对于光电传感器,可以通过数模转换将模拟信号转换为数字信号;对于摄像头,可以使用图像处理算法来提取轨迹的信息。
2. 数据处理采集到的数据需要进行处理,以确定小车需要前进、后退、左转还是右转。
可以编写算法来对数据进行分析,并根据分析结果给出相应的控制信号。
3. 运动控制根据数据处理的结果,需要编写代码来控制电机的转动。
对于直流电机,可以通过调整电机的电压或占空比来控制转动方向和速度。
四、系统测试和优化完成软件设计后,需要对整个系统进行测试。
可以将循迹小车放置在黑白轨迹上,观察它是否能正确地跟随轨迹运动。
如果有异常,需要对系统进行调试和优化,直到达到预期的效果。
五、总结循迹小车方案设计涉及到硬件和软件两个方面。
正确选择电机、传感器和控制器,并进行合理的连接和编程,是实现循迹小车功能的关键。
通过系统测试和优化,可以不断提高循迹小车的性能和稳定性。
基于红外光电传感技术的自动循迹小车小车系统
基于红外光电传感器的自动循迹小车系统摘要:本方案是一种基于红外光电传感技术的自动循迹小车系统的设计,包括小车系统构成、光电传感器原理及系统软硬件设计方法。
小车以红外光电传感器为检测模块,单片机STC12C5A60S2 为控制核心, 产生PWM波,控制小车速度。
利用红外光电传感器对路面黑色轨迹进行检测,并将路面检测信号反馈给单片机。
单片机对采集到的信号予以分析判断,及时控制舵机以调整小车转向,从而使小车能够沿着黑色轨迹自动行驶,实现小车自动寻迹的目的。
关键词:红外光电传感器STC12C5A60S2 自动循迹小车Abstract : This is a design of a smart auto-tracking vehicle which based on infrared photoelectric sensor technology. The construction of the car ,the principle of photoelectric sensor and methods of hardware and software design are included. The car use infrared photoelectric sensor as detecting module and STC12C5A60S2 as heart of control in this system. Then using PWM waves produced by MCU to control the car speed.By using infraraed sensor to detect the information of black track,the smart vehicle acquires the information and sends them to the Servo. Then the Servo analyzes the signals and controls the movements of the motors,which make the smart vehicle move along the given black line antomaticly.Keywords:Infrared photoelectric sensor STC12C5A60S2 auto-tracking vehicle目录1.背景及思路 (2)1.1背景 (2)1.2 整体方案 (2)2.红外光电传感器 (3)2.1红外光电传感器原理 (3)2.2红外光电传感器在本方案中的应用 (4)3.硬件设计 (4)3.1主控电路模块 (5)3.2红外检测模块 (6)3.2.1红外检测模块电路图 (7)3.2.2红外检测模块的安装 (7)3.3舵机 (8)3.4电源模块 (9)3.5整体电路图 (10)4.软件设计 (10)4.1 PWM控制 (10)4.2主程序流程图 (11)4.3小车循迹流程图 (12)5.总结与展望 (14)6.参考文献 (15)1.背景及思路1.1背景自动循迹小车可以实现自动识别路线,判断并自动避开障碍,选择正确的行进路线等功能。
基于LDC1000电感数字传感器的自动循迹智能小车控制系统设计

Ab s t r a c t : Au t o ma t i c s ma r t ra t c k i n g c a r u s e s s t e e r i n g e n g i n e t o mo v e LDC1 0 0 0 b a c k a n d f o r t h t o s c a n a f a n ・ s ha p e d re a a , d e t e c t s s i g n a l s a n d s e n d s t h e m t o S TM 3 2 F4 0 7 VGT6 mi c r o c o n t r o l l e r f o r p r o c e s s i n g, t h u s a c c u r a t e l y c o n ro t l s t wo DC mo t o r s s p e e d nd a l i g h t s o u n d s y s t e m t o r e a l i z e wi r e t r a c k t r a c k i n g a n d c o i n s d e t e c t i o n . Me n wh a i l e t h e s ma r t ra t c in k g C r a a d o p t s
基于光电传感器的智能小车循迹模块设计
【注】本课程设计既可以作为传感器课程设计也可以作为单片机课程设计,只需稍加修改偏向课程设计报告书课程名称:题目:基于光电传感器的智能小车寻迹模块设计系(院):学期:专业班级:姓名:学号:目录一、设计目的 (1)二、题目的具体设计要求 (1)三、系统的总体实现原理、方案设计 (1)1.国内外发展现状 (1)2.文献综述 (1)3.系统的总体实现原理 (2)4.总体方案设计 (2)4.1主控模块选用方案对比 (2)4.2传感器选用方案对比 (3)4.3传感器的安装方案对比 (3)四、传感器选用 (4)1.选用型号及特点 (4)2.内部结构及工作原理 (4)3.传感器工作电路设计及说明 (5)五、其它各部分单元电路设计 (6)1.控制模块 (6)2.电源模块 (7)3.电机及驱动模块 (7)3.1电机 (7)3.2驱动 (7)六、系统总电路原理图(见附录三) (9)1.系统总体说明 (9)2.软件设计 (10)2.1小车循迹流程图 (10)2.2中断程序流程图 (11)七、仿真与调试(见附录四) (11)八、总结与心得体会 (12)参考文献 (12)附录一:元器件清单 (13)附录二:单片机测试程序 (13)附录三:系统总电路原理图 (15)附录四:Proteus原理仿真图 (16)1.直行 (17)2.二级右转 (18)3.二级左转 (19)智能小车寻迹模块设计报告一、设计目的1. 能较全面地巩固和应用“传感器及检测技术”课程中所学的基本理论和基本方法,并初步掌握小型数字系统设计的基本方法。
2. 通过《传感器及检测技术》课程设计,掌握传感器及检测系统设计的方法和设计原则及相应的硬件调试的方法。
进一步理解传感器及检测系统的设计和应用。
3. 培养独立思考、独立准备资料、独立设计规定功能的数字系统的能力。
4. 培养书写综合设计报告的能力。
二、题目的具体设计要求1.设计一个基于光电传感器的自动寻迹小车,使小车能够自动检测地面黑色轨迹,并沿着黑色轨迹行驶。
毕业论文《自动循迹小车》
.毕业论文(设计)题目自动循迹小车院系电气与电子信息工程学院专业自动化年级 2013级学生姓名赖德鹏学号 130650108田巧玉自动循迹小车专业自动化学生赖德鹏指导教师田巧玉【摘要】本设计以LDC1000传感器探测金属为基础,以单片机控制技术为核心,实现小车自动探测金属轨道并正常行驶。
同时加入前进距离和时间的记录,用户可通过单片机STC15F2K60S2控制传感器根据不同的金属轨道进行参数矫正。
小车使用了L298N电机驱动以便于小车可以不通的速度匀速稳定的前进,最终实现集金属探测,实地矫正,参数的设定与数据显示于一身的智能循迹小车。
此设计有体积小,功耗低,适用范围广,用户操作界面设计人性化等特点。
【关键词】金属探测参数可调多功能显示智能控制Automatic Vehicle Tracking【Abstract】This design is based on the LDC1000 sensor to detect the metal, with the single-chip microcomputer control technology as the core, to realize the automatic detection of the metal track and normal driving. At the same time to join the advance distance and time records, the user can be controlled by a single chip microcomputer STC15F2K60S2 sensor based on different metal track parameters. The car uses a L298N motor drive for the car can get stable speed constant progress, and ultimately set the metal detection, field correction, intelligent vehicle tracking and data set parameters are displayed in a. This design has the characteristics of small size, low power consumption, wide application range, user-friendly design of user interface, and so on.【Key words】Metal detection adjustable parameters multifunction display intelligent control目录绪论........................................................ 错误!未定义书签。
智能小车循迹设计方案
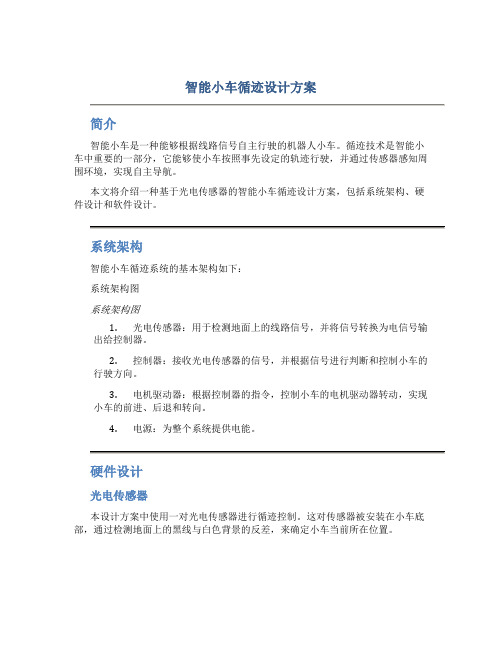
智能小车循迹设计方案简介智能小车是一种能够根据线路信号自主行驶的机器人小车。
循迹技术是智能小车中重要的一部分,它能够使小车按照事先设定的轨迹行驶,并通过传感器感知周围环境,实现自主导航。
本文将介绍一种基于光电传感器的智能小车循迹设计方案,包括系统架构、硬件设计和软件设计。
系统架构智能小车循迹系统的基本架构如下:系统架构图系统架构图1.光电传感器:用于检测地面上的线路信号,并将信号转换为电信号输出给控制器。
2.控制器:接收光电传感器的信号,并根据信号进行判断和控制小车的行驶方向。
3.电机驱动器:根据控制器的指令,控制小车的电机驱动器转动,实现小车的前进、后退和转向。
4.电源:为整个系统提供电能。
硬件设计光电传感器本设计方案中使用一对光电传感器进行循迹控制。
这对传感器被安装在小车底部,通过检测地面上的黑线与白色背景的反差,来确定小车当前所在位置。
控制器控制器是智能小车循迹系统的核心部分,其主要功能是接收光电传感器的信号,并根据信号进行判断和控制小车的行驶方向。
在本设计方案中,我们使用单片机作为控制器。
单片机具有较高的计算能力和较快的响应时间,能够满足智能小车循迹系统的需求。
电机驱动器电机驱动器用于控制小车的电机驱动器转动,实现小车的前进、后退和转向。
在本设计方案中,我们使用直流电机作为小车的驱动器,并采用相应的电路设计来控制电机的转动。
电源为整个系统提供电能的电源是智能小车循迹系统的基础。
在设计电源时,需要考虑系统的功耗和电压稳定性等因素,保证系统能够正常运行。
软件设计智能小车循迹系统的软件设计主要包括信号处理和控制算法。
信号处理在信号处理方面,首先需要对光电传感器的输出信号进行采集和处理。
采集到的模拟信号需要经过模数转换器转换为数字信号,然后通过滤波和放大等处理得到准确的线路信号。
控制算法控制算法负责根据信号判断小车的当前位置,并控制小车的行驶方向。
常见的控制算法有比例控制和PID控制等。
比例控制算法根据当前位置与目标位置的偏差大小来控制小车的速度和转向;PID控制算法在比例控制的基础上,加入了积分和微分的部分,能够更精确地控制小车的行驶。
基于电感传感器的自动循迹小车系统设计

基于电感传感器的自动循迹小车系统设计蔡力坚;郭业才【摘要】A system of intelligent car is controlled by MSP430F169 microcontroller to realize the car automatic tracking function,inductive sensors are used for data acquisition.The car is made up of coupling isolation motor drive module,geared motor modules,buzzer sound module,LCD module,encoder module,Bluetooth module,battery module.Itis a four-wheel driven vehicle,driven by microcontroller which outputs variable pulse signal,and can change steering and speed by DCmotor.Microcontroller can continually scan four-channel data outputted by LDC1314 and control the car to complete tracing action.If an obstacle is detected,buzzer module yields voice prompt.It uses timer module for precise timing,uses encoder speed detector to detect the car speed,the elapsed time of the car and driving distances can be displayed on the LCD screen.This paper seeks to complete the system design in high precision and low power consumption.%设计了一种基于电感传感器的自动循迹小车系统,该系统以MSP430F169为主控芯片,由电感传感器进行数据采集,实现小车自动循迹功能.系统由光耦隔离电动机驱动模块、减速电动机模块、蜂鸣器声音提示模块、液晶显示模块、编码器测速模块、蓝牙模块、电池模块组成;采用四轮驱动方式,由单片机输出可变脉冲信号驱动减速直流电动机,控制小车转向和速度;单片机通过不断扫描传感器4个通道输出的数据,控制小车完成循迹动作.当检测到障碍物时,单片机控制蜂鸣器模块发出声音提示;由单片机定时器模块实现精确计时,并由编码器测速装置测出小车运行的实时速度,将小车的实时运行时间和行驶距离显示在液晶屏幕上,系统设计精度高、功耗低.【期刊名称】《实验室研究与探索》【年(卷),期】2017(036)010【总页数】5页(P75-79)【关键词】智能小车;电感检测;可变脉冲信号【作者】蔡力坚;郭业才【作者单位】南京信息工程大学电子与信息工程学院,南京210000;南京信息工程大学电子与信息工程学院,南京210000;江苏省大气环境与装备技术协同创新中心,南京210044【正文语种】中文【中图分类】TP273+.1近年来,智能车辆己成为车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。
基于红外光电传感器的智能寻迹小车设计
i tl g n a i g c rt ee t n r u e if r t n t r u h t e i r r d p oo l crc s n o . h y tm n ld sp o e s r nel e t r c n a d tci o t n oma i h o g n a e h te e t e s r T e s s i t o o o h f i e i cu e r c so
智 能 汽 车 又称 为轮 式 机 器 人 , 目前 多 用 在 科 学 探 索 、 工 业生产等场合 , 是集环境感知 、 划决策 、 它 规 自动 行 驶 等 功 能
1 系统 设 计
智 能 车 系 统 以 单 片 机 作 为 处 理 核 心 。 个 系 统 由 路 径 识 整 别 模 块 、 机 驱 动 模 块 、 机 驱 动 模 块 、 速 检 测 模 块 、 晶 电 舵 车 液
块、 径识别模块、 路 电机 驱 动 模 块 、 机 驱 动 模 块 、 舵 车速 检 测 模 块 、 晶 显 示模 块 与 电 源模 块 等 组 成 。 液 实际 应 用表 明 , 该
小 车 可 以在 专 门设 计 的 跑 道 上 快 速 平稳 地 实现 寻迹 功 能 。 关键 词 :红 外光 电 ;智 能 ;寻 迹 ;飞思 卡 尔 ;MC Sl DG1 8 9 2 2B
mo ue,p t e o nt n mo u e moo r e d l dl ah r c g i o d l , i tr d v r mo u e,s r o d v r mo u e p e ee t n mo u e i ev r e d l ,s e d d tc i d l ,L d l , i o CD mo u e
基于电感数字变换传感器的智能小车自动循迹系统

第25卷第2期2018年4月工程设计学报Chinese Jo u rn a l o f E ngineering DesignV o l.25No.2Apr.2018doi:10 3785/j issn1006-754X2018 02 013基于电感数字变换传感器的智能小车自动循迹系统高凤强^,董坤煌^,周牡丹u,郭一晶^(1.厦门大学嘉庚学院信息科学与技术学院,福建漳州363105 ;2.厦门大学嘉庚学院嘉庚微柏工业机器人创新实验室,福建漳州363105)摘要:为了解决智能循迹小车常用的路径识别传感器易受电磁、光线等干扰的问题,提出了基于电感数字变换传感 器的智能小车自动循迹系统。
通过分析电感数字变换传感器的工作原理,得出通过扩展传感器感应线圈来扩展感应 范围的方法,并基于该方法设计了一种使用单个LDC1000电感数字变换器的传感模块。
该模块利用SN74LV4052A 模拟开关实现对传感器线圈的扩展;采用MSP430单片机搭建了包括主控模块、电源模块、驱动模块和传感器模块的 循迹硬件测试系统;通过实时采集和处理传感器的数据并对小车位置进行调整,实现了硬件测试系统循迹的功能;最 后,在测试系统上进行了传感器对金属的感应实验和循迹测试。
实验结果表明:该传感器可实时检测到轨道与线圈 的水平和垂直距离的变化,可以为循迹功能的实现提供保证;该智能小车在5m m宽的锡箔纸轨道上可以得到良好的 循迹效果。
研究结果表明该系统具有适用性强、检测技术稳定的特点,可以广泛应用于工业现场智能循迹。
关键词:电感数字变换传感器;循迹小车;涡流感应;金属探测中图分类号:TP273 ; TP249W文献标志码:A文章编号:1006-754X(2018)02-0216-07Automatic tracking system for intelligent carbased on inductance-to-digital conversion sensorGAO Feng-qiang1,2, DONG Kun-huang1,2, ZHOU Mu-dan1,2, GUO Yi-jing1,2(1.School of Information Science& Technology ,Tan Kah Kee College,Xiamen University,Zhangzhou363105 ,China?2.VIBOT Industrial Robot Innovation Lab,Tan Kah Kee College,Xiamen University,Zhangzhou363105 ,China)A b s tra c t:A n in te llig e n t tra c k in g system based on in d u c ta n c e-to-d ig ita l co n v e rte r is proposed tosolve the p ro b le m th a t the p a th id e n tific a tio n sensors are susceptible to e le ctro m a gn e tic and lig h t in te rfe re n ce.A m e th o d o f expanding in d u c tio n range by e xte n d in g sensor in d u c tio n c o il was o btained th ro u g h th e analysis o f the w o rk in g p rin c ip le o f the in d u c ta n c e-to-d ig ita l co nversion sensor.T h e n a sensor m o d u le w ith a single L D C1000 in ductance d ig ita l c o n v e rte r was designed based on th is m e th o d?and the m odule realized e xte n d in g sensor c o il th ro u g h the use o f SN74L V4052A analog s w itc h.T h e M S P430 M C U was used to achieve a tra c k in g test system in c lu d in g m ain c o n tro l m o d u le,p o w e r m o d u le,d riv e m o d u le and sensor m odule.T h e tra c k in g fu n c tio n o f h a rdw are te stin g system w as im p le m e n te d th ro u g h the re a l-tim e a cq u isitio n and processing o f sensor data toa djust p o s itio n o f the car.A t la s t,the sensor-to-m e ta l sensing e xp e rim e n ts and tra c k in g testsw ere p e rfo rm e d on the test system.E x p e rim e n ta l re su lts show ed th a t the h o riz o n ta l and v e rtic a l distance changes betw een the tra c k and the c o il co u ld be detected by the sensor w h ic h p rovided guarantee fo r the tra c k in g fu n c tio n.A t the same t im e,the system co u ld get a good tra c k in g e ffect收稿日期:2017-07-10 本刊网址•在线期刊:http://w w w zjujournals com/gcsjxb 基金项目:福建省中青年教师教育科研项目(JA T160651);漳州市自然科学基金资助项目(ZZ2017J34 );大学生创新创业训练 计划项目(201613469024);作者简介:高凤强(1984—),男,福建漳州人,讲师,硕士,从事工业机器人控制、计算机网络研究,E-m ail: fengqianggad3fox-mail com,http://orcid org/0000-0002-7677-8463通信联系人:周牡丹(1979—),女,福建福鼎人,副教授,硕士,从事机器人控制、四旋翼飞行器控制研究,E-m ail: mudanzhou3xujc com,http://orcid org/0000-0002-7891-0018第2期高凤强,等:基于电感数字变换传感器的智能小车自动循迹系统•217 •in the fo il tra c k w ith w id th o f 5 m m.T h e research re s u lt indicates th a t th is system has character-istics o f stro n g a p p lic a b ility and stable d etection te chnology ,so th a t it can be w id e ly applied to the in d u s tria l fie ld o f in te llig e n t tra c k in g in the fu tu re .K ey w ords:in d uctance-to-d ig ita l conversion sensor;a u to m a tic tra c k in g car;eddy c u rre n t te stin g;m e ta l d etection智能循迹小车能够针对特定的路径使用特定的传感器进行路径识别,并按一定的算法使车体沿指定的路径行走。
一种电感数字传感器的循迹小车控制系统设计

•84 •计算机测量与控制.2017. 25(5)Computer Mea s urement & Control控制技术文章编号:1671 - 4598(2017)05 - 0084 - 03 DOI:10. 16526/j. cnki. 11-4762/tp. 2017. 05. 023 中图分类号:1T273 文献标识码:A一种电感数字传感器的循迹小车控制系统设计张著,赵鵬(榆林学院能源工程学院,陕西榆林719000)摘要:针对传统的以红外反射式传感器为主的循迹小车存在受强光干扰不灵敏、循迹线的铺设色差及线宽要求较高的缺点,提出了 以单片机为控制器,LDC1000电感数字转换器和外接线圈作为循迹传感器,结合光电测速电路、驱动电路、LCD显示电路等,实现在跑 道标识为一根直径为0.9 mm的细铁丝的平面跑道上稳定运行;具备在运行途中检测跑道上的金属片,实现报警和计数功能;具备实时 显示小车运行时间、速度和距离的功能;实验证明,该系统集测量精度高、显示直观及工作性能稳定等优点,采用的非接触、无磁体的 感应技术对以导体为循迹标识的小车的设计有一定的指导意义。
关键词:单片机;循迹小车;电感数字转换器;循迹传感器Control System Design of Tracking Car with Digital Inductance SensorZhang J in g,Zhao Peng(School of Energy Engineering,Yulin University,Yulin719000,China)Abstract:With regard to the disadvantages,such as insensitivity under the interference of high tracking lineS chromatic aberration and line width,of the traditional tracking car,which i s mainly based on reflected infrared article proposes a control system design which uses Micro Control Untt as a controlLsr , LDC1000 digital inductance converter and external coil as tracking sensor,combines o pto —electronic testing velocity circuit,drive circutt and LCD display circuit,etc. Such control system could realize a stable running on a flat runway with a runway identification of a thin wire whose diameter is 0. 9 mm. The control system has the function of detecting sheet metals on the runway while running,could realize the alarming and counting functions;and has the function of the real—tme display of the car's running tme,speed and distance. The experiment indicates that this system has the advantages like a high precision,a clear display and a stable performance,adopts the non —contact,non — magnet sensor technology and cance to the design of the cars using conductor as tracking identifications.Keywords:micro control unit;tracking car;digital inductance converter;tracking sensor〇引言智能小车是一个集环境感知、规划决策、自动行驶等功能 为一体的控制系统,广泛应用于高温、高压及有毒害气体等人难以现场工作的特殊环境下的救援及辅助探测等工作。
一种电感传感器在智能小车路径识别中的应用方案设计

经销商保证金管理制度为了保护经销商的利益,保证厂商双方的长远利益,保证三得利市场操作的有序进行,使市场获得持续、健康地发展,经公司研究,制定经销商保证金管理制度、、经销商缴纳销售履约保证金的目的1、保证经销商在合同规定的经销区域及产品品类范围内的经销,不跨区经销;2、保证经销商执行公司的价格体系和促销政策,不发生窜货行为;3、保证经销商不擅自退货,杜绝单方面擅自解除经销合同;4、保证经销商维护三得利公司的企业形象和合法权益;5、保证经销商遵守和执行经销合同约定内容及其他三得利营销制度和政策;、、经销商缴纳销售履约保证金的缴纳标准1、凡从公司打款进货的经销商都应缴纳保证金县级合作经销商及物流经销商:1万元地级合作经销商及物流经销商: 2万元自营经销商: 销售额在100万及以下,保证金1万元,销售额在100-200万,保证金2万元,销售额在200-300万,保证金3万,依次类推。
2、如经营销中心考察和研究,按上述标准收取销售履约保证金,还不足以对经销商有效制约的,经公司营业管理部核准后,可适当提高对该经销商收取额度。
、、经销商销售履约保证金的缴纳程序1、保证金缴纳时间:经销商签订经销合同后,首车打款发货时,将保证金打入三得利公司指定账户,由公司财务部统一给予收款凭据;2、保证金制度执行时间:A、新经销商从此制度下发之日起执行;B、原有经销商从签订2013年经销合同之日起执行;C、没交保证金或金额不足的经销商限期 2013年10月1日前补齐保证金款,否则不予发货;1 3、保证金不得作为货款使用;4、保证金汇入方法:经销商汇入保证金时,必须要求其以签订合同时使用的名称对应账号汇入,尤其个体经营者,在汇入保证金时必须标明汇款企业全称,汇款用途中应标注此款项为保证金;5、为便于营销中心查对保证金,公司财务部每季下发保证金汇总表,下发各销售大区和营业管理部;四、经销商销售履约保证金的扣罚1、经销商如出现窜货、低价、售假、行贿我方人员等违规行为的,经我方营销中心或监察部门核查,公司分管领导审核签字后通知财务部执行处罚,并由销售大区书面通知经销商。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
N a n j i n g 2 1 0 0 0 0,Ch i n a ; 2. . 1 i a n g s u C o l l a b o r a t i v e I n n o v a t i o n C e n t e r o n A t mo s p h e r i c En v i r o n me n t a n d
E q u i p me n t T e c h n o l o g y( C I C A E E T) , Na n j i n g 2 1 0 0 4 4, C h i n a )
Abs t r a c t:A s y s t e m o f i n t e l l i g e n l c a l ‘ i s c o n t r o l l e d b y MSP 4 3 0F1 6 9 mi c r o c o n t r o l l e r t o r e a l i z e t h e c a r a ut o ma t i c t r a c ki n g
计精 度 高 、 功 耗 低 关键 词 : 智 能 小 车 ;电 感 检 , 9 1 《 ;可 变 脉 冲 信 号
中 图分 类号 : T P 2 7 3 . 1
文献 标志 码 : A
文 章编 号 : 1 0 0 6— 7 l 6 7 ( 2 0 l 7 ) l 0— 0 0 7 5— 0 5
丽
基 于 电 感 传 感 器 的 自动 循 迹 小 车 系 统 设. 南 京 信息 T 程 大 学 电 子 与 信 息 工 程 学 院 ,南 京 2 1 0 0 0 0 ; 2 . 江苏 , 肯大 气 环 境 与 装 备 技 术 协 同 创 新 中 心 , 南京 2 1 0 0 4 4 )
I n t el l i g e n t Tr a c k i n g Car Ba s ed on I n du c t an c e Sen s or s
C , I , I , l y i a n ’ . Gl / 0 Y e c a i ・
( 1 . S c h o o l o f E l e c t r o n i ( ’ E n g i n e m’ i n g,Na n j i n g U n i v e r s i t y o f I n f o r ma t i o n S c i e n c e& T e c h n o l o g y ,
SSN l 006 —7l 67
宫 赂 宝 研 亩与掘 击
RES E ^RCH AND EXPI ORATI ( ) N l N I AB( ) RA_ r 0R、
第3 6卷 第 1 0期
V o 1 . 3 6 No . 1 O
1 0 I 7年 1 0 J
0c 1 .2 0l 7
f un ( 、 t i o n.i n d u e t i v e s e n s o r s a r e u s e ( t 1 I ’ da t a a c qu i s i t i ( ) n . Th e c a r i s ma d e u p o f c o u pl i n g i s o l a t i o n mn t o r dr i v e mo d u l e, g e m— e ( 1 n l o t ( ) r mo d ul e s.b u z z e r s o u n d mo d ul e. L CD mo d u l e,e n c o d e r mo d u l e,Bl u e t ( ) ( ) t h mo du l e,b a t t e r y mo d u l e. I t i s a f o u’wh e e l d r i v e n v e h i c l e, d r i v e n h y I ni c l ’ o c o n t r o l l e r wh i c h o ut p u t s v a r i a b l e p u l s e s i g n a l ,a n d c a n c h a n g e s t e e r i n g a n d s p e e d b y DC n l o t o r . Mi c r o c o n t r o l l e r c a n c o n t i n u a l l y s c a n f o ur — c ha n ne l d a t a o u t p u t t e d b y LDCI 31 4 a n d c o n t r o l t h e c a r t o c o mp l e t e t r a c i ng a c t i o n .I f a n o b s t a c l e i s de t e c t e d,t mz z e r mo d ul e y i e l d s v o i c e p r o mp t .I t US e S t i me r mo d u l e f o r p r e c i s e t i mi n g,us e s e n c o d e r s p e e d d e t e c t o r t o de t e c t t h e c a r s p e e d, t h e e l a p s e d t i me o f t he c a r a n d d r i v i n g di s t a n c e s C a l l b e d i s p l a y e d o n t he LCD s c r e e n . Th i s p a p e r s e e k s t o c o mpl e t e t he s y s t e m d e s i g n i n h i g h p r e c i s i o n a n d l o w p o we r
道 输 出的数 据 , 控 制 小车 完成循 迹 动作 当检测 到 障碍物 时 , 单 片机控 制 蜂 呜 器模
块 发 出声音提 示 ; 由 单 片机 定 时 器模 块 实现 精 确 计 时 , 并 由编 码 器 测 速 装 置 测 出 小 车 运行 的 实时速 度 , 将 小车 的 实时运行 时 间和行 驶距 离显 示在 液 晶屏 幕 上 , 系统 设
摘 要 : 设 计 了 一 种 基 于 电 感 传 感 器 的 自动 循 迹 小 车 系 统 , 该 系统 以 MS P 4 3 0 F I 6 9 为主控 芯 片 , 由 电感 传 感 器 进 行 数 据 采 集 , 实现 小 车 自动 循 迹 功 能 、 系统 由 光 耦 隔
离电动 机驱 动模 块 、 减 速 电动 机 模 块 、 蜂 呜 器 声音提 示模 块 、 液 晶 显 示模 块 、 编码 器 测 速模 块 、 蓝 牙模 块 、 电池模块 组 成 ; 采 用 四轮 驱 动 方 式 , 由 单 片 机 输 出可 变 脉 中信 号驱 动 减速 直流 电动 机 , 控 制 小 车转 向和速 度 ; 单 片 机 通 过 不 断 扫 描 传 感 器 4 个 通