一种基于DSP芯片与CAN总线的电源监控系统设计
基于DSP的CAN总线控制系统的设计

信 功 能 和 现 场 智 能 单 元 控 制 功 能 的 升 级。
S C N 0 0上位机监控 软件 采用 的是 It l i H A 20 neu o l t n公
司的 FX IO驱动程序开发工具 开发 的专用驱 动程 I /
序, 只适 合于 FX监控 组态软件 和单 一厂 家开 发 的 I
SI P总线
C N总 线 A 扩 展
EEPC .1系列 单 片 机 , 围 电路 外
大 , 耗 多。 为 此 ,本 课 题 组 开 发 了 基 于 功
T S82 S M 2 1 D P处 理 器 为 核 心 的 新 型 智 能 测 控 组 件 , 并 采 用 了 O C 服 务 器 实 现 IO 驱 动 , 补 了 P / 弥 S C N o0系 统 中 的缺 陷 。 H A 2o 2 改进 后 系统 ( MB 的体 系结 构 M )
9/ 0 0 N 工控 软件 采用美 国 N 公 司 的 L bi 82 0 / T。 I av w e
软件 , 通过 Lbi av w建立友 好 的人机界 面 , e 完成 实 时 显示 、 历史记 录、 故障报警及打 印报 表等系统监控 和 管理功能 。L bi ave w与现场 的数据 交换 由 O C接 口 P
陈晓侠 , 陆 坦 , 立明 王
( 连 变通 大 学 , 宁 大 匪 l 6 2 ) 大 辽 10 8
摘要 : 以 S C N 0 0控制 系统现场智能测控组件的升级 为背景 , H A 20 介绍 以 D P为现 场智 能测控单元 微处理 S
器 的新 型 智 能 测 控 组件 对 系统 控 制 功 能 厦 通 信 功 能 的 改 善 。详 细介 绍 T 2 1 MS 82信 号 处理 器 的 e A C N模 块 以及 其 与 C N 总 线之 间的 通 信 。 给 出其 通 信 部 分硬 件 和 软 件 的 设 计 方 法 。 用 O C服 务 器 为 上 、 位 机 的 IO 驱 动 A 并 采 P 下 /
基于DSP的电动汽车CAN总线通讯技术设计
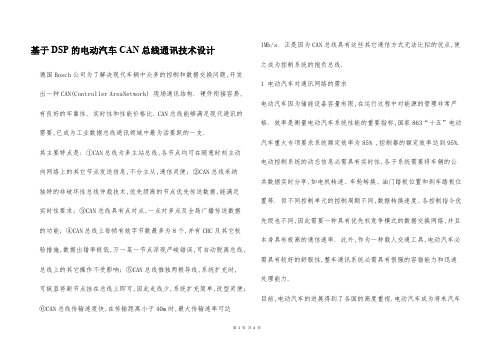
基于DSP的电动汽车CAN总线通讯技术设计德国Bosch公司为了解决现代车辆中众多的控制和数据交换问题,开发出一种CAN(Controller AreaNetwork) 现场通讯结构. 硬件衔接容易,有良好的牢靠性、实时性和性能价格比. CAN总线能够满足现代通讯的需要,已成为工业数据总线通讯领域中最为活要跃的一支.其主要特点是: ①CAN总线为多主站总线,各节点均可在随意时刻主动向网络上的其它节点发送信息,不分主从,通信灵便; ②CAN总线采纳独特的非破坏性总线仲裁技术,优先级高的节点优先传送数据,能满足实时性要求; ③CAN总线具有点对点,一点对多点及全局广播传送数据的功能; ④CAN总线上每帧有效字节数最多为8个,并有CRC及其它校验措施,数据出错率极低,万一某一节点浮现严峻错误,可自动脱离总线,总线上的其它操作不受影响; ⑤CAN总线惟独两根导线,系统扩充时,可挺直将新节点挂在总线上即可,因此走线少,系统扩充简单,改型灵便;⑥CAN总线传输速度快,在传输距离小于40m时,最大传输速率可达1Mb/s. 正是因为CAN总线具有这些其它通信方式无法比拟的优点,使之成为控制系统的抱负总线.1 电动汽车对通讯网络的需求电动汽车因为储能设备容量有限,在运行过程中对能源的管理非常严格. 效率是衡量电动汽车系统性能的重要指标,国家863“十五”电动汽车重大专项要求系统额定效率为85% ,控制器的额定效率达到95%. 电动控制系统的动态信息必需具有实时性,各子系统需要将车辆的公共数据实时分享,如电机转速、车轮转换、油门踏板位置和刹车踏板位置等. 但不同控制单元的控制周期不同,数据转换速度、各控制指令优先级也不同,因此需要一种具有优先权竞争模式的数据交换网络,并且本身具有极高的通信速率. 此外,作为一种载人交通工具,电动汽车必需具有较好的舒服性,整车通讯系统必需具有很强的容错能力和迅速处理能力.目前,电动汽车的进展得到了各国的高度重视.电动汽车成为将来汽车进展的主流方向. 电动汽车内电气元件极多,需要实时传输和分享的数据无数.如何提高电动汽车通讯的实时性、牢靠性和应急处理能力成为电动汽车通讯的难点所在. 我们采纳TMS320LF2407型DS作为电动汽车通讯系统的主处理器,利用良好的迅速处理能力提高数据处理速度,从而提高通讯的实时性;利用DSP内嵌的CAN总线模块作为CAN的控制器,削减硬件的复杂性,从而提高通讯的牢靠性;通过软件设计紧张时刻屏蔽次要因素来提高电动汽车的应急处理能力.2 控制计划电动汽车总成控制我们采纳先进的含糊控制,采纳的控制器也是TMS320LF2407型的DSP. 对采集到的刹车信号,加速信号和反馈回的转速信号举行含糊处理,得到期望的转速信号,并将得到的转速值通过CAN 总线传送到电动机的控制机构,对电动机举行控制,满足驾驶员的驾驶意图. 同时管理灯光系统和屏幕显示系统. 屏幕显示系统实时显示电动汽车的运行状态. 详细控制计划1 所示. 图1 电动汽车控制系统结构框图3 电动汽车CAN总线通讯计划电动汽车控制需要良好的通讯协调性和运行牢靠性. 良好的通讯系统是实现电动汽车牢靠运行的关键. CAN总线结构是一种有效支持分布式控制或实时控制的串行通讯网络. 图2 是一个典型的电动汽车CAN 总线结构暗示图,包括整车动力部分的主电动机控制器、电池组管理系统、电动汽车屏幕显示系统等多个设备,这些子系统之间通过CAN举行数据通讯和指令传输. 每个节点设备都能够在脱离CAN 总线的状况下自立完成自身系统的运行,从而满足车辆运行平安性的需要. 同时,CAN总线也不会由于某个设备的脱离而浮现系统结构崩溃的现象.图2 电动汽车CAN 总线结构图4 CAN总线模块CAN 总线模块是DSP的一个16位的外设,是一个完整的CAN 控制器.除具有CAN 总线的基本功能外,还有一些特有功能,如:对象有六个邮箱,其数据长度为0~8 个字节,其中两个接收邮箱(0、1) ,两个发送邮箱(4、5) ,两个可配置为接收或发送邮箱(3、4) ;自动回复远程哀求功能;可编程的CAN 总线唤醒功能;自测试模式功能等. 对CAN 总线的拜访分为控制/ 状态寄存器的拜访和邮箱的RAM 拜访.CAN 总线控制模块的内存空间分配图3 所示.图3 CAN 总线内存空间分配CAN 控制器发送的信息帧有两种,一种是发送数据帧,一种是发送远程帧. 发送邮箱有邮箱4 和邮箱5以及被配置为发送方式的邮箱2 和邮箱3. 发送数据帧时,在数据写到发送邮箱的数据区后,假如相应的发送哀求位使能,则数据帧被发送到CAN 总线上. 数据帧的数据区可以通过软件设置成1~8 个字节. 数据帧的格式4 所示. 图4 CAN 总线数据帧CAN 总线控制器的接收邮箱有邮箱0和邮箱1及被配置为接收方式的邮箱2 和邮箱3. CAN 控制器在接收信息时,首先要将接收信息的标记符与相应接收邮箱的标记符举行比较,惟独标记符相同的信息才干被接收. CAN 总线控制器的接收寄存器使得接收邮箱可以忽视更多的位来接收信息. 但是,假如当接收屏蔽使能位(AME) 为0 时,则局部接收屏蔽寄存器将失效. 惟独配置为发送方式的邮箱2 和邮箱3 才可以接收自动应答远程帧. 当邮箱接收到远程帧后,接收节点将自动发送一个数据帧作为应答.5 接口电路设计因为DSP 本身内带CAN 总线模块,所以不需要特地的CAN 控制器,DSP 本身不具有CAN ,需要外接CAN 收发器82C250 ,中间用法光电隔离器6N137. 假如距离很短,可以不用法光电隔离器. DSP与光电隔离器和CAN 收发器硬件衔接图5 所示.图5 DSP 与CAN 总线硬件衔接图6 电动汽车总成控制器CAN通讯的软件实现电动汽车总成控制器是电动汽车的心脏,它需要常见的接收和发送数据对电动汽车举行实时控制和检测. 发送信息采纳查询方式,接收信息采纳中断方式. 通过设定不同大事的不同优先级来确定信息的接收和发送挨次,同时增强紧张大事处理程序来提高控制器处理紧张大事的能力,保证车辆和人身平安. 紧张大事处理程序是当紧张大事发生时,如执行器件损坏,急刹车和急转弯等,通过临时屏蔽低优先级大事,如电池电量检测, 显示系统等,使控制器有足够的时光处理紧张大事,以提高控制器的实时控制能力和应急处理能力. 控制器软件流程图6 所示.图6 控制器软件流程图7 结论目前,现场总线在自动化领域中迅速进展,CAN总线作为一种很有影响的现场总线,采纳了许多新的技术和设计,使CAN 总线成为最有进展前途的现场总线之一. CAN 总线以其高实时性、高牢靠性和高灵便性,在工业自动化控制中得到了越来越多的应用. 本文应用DSP 控制器作为CAN 总线的微处理器,利用DSP 很强的数据处理能力和CAN 总线传输速率高、牢靠性高的特点,对电动汽车内复杂的通讯系统提出解决计划. 试验证实,本系统不但解决了电动汽车通讯对实时性的要求,而且牢靠性和稳定性都得到了提高.。
基于DSPIC芯片和CAN总线的控制模块研发与设计

基于DSPIC芯片和CAN总线的控制模块研发与设计一、项目背景随着现代汽车电子化的发展和智能汽车的崛起,控制模块的研发与设计变得愈发重要。
基于DSPIC芯片和CAN总线的控制模块可以实现高性能、高效能的控制和通信功能,因此成为了目前控制模块设计的主要方向之一二、技术原理1.DSPIC芯片DSPIC芯片是一种专门用于数字信号处理的微控制器,具有高性能、高灵活性和低功耗的特点。
它集成了DSP和微控制器的功能,在计算能力和处理速度方面有着明显优势。
2.CAN总线CAN(Controller Area Network)总线是一种广泛应用于汽车电子系统中的通信协议,它可以实现各个控制模块之间的高速数据传输和通信。
CAN总线具有较强的抗干扰能力,可靠性高,并且支持多主机和多设备的连接。
三、硬件设计1.DSPIC芯片选型根据具体需求,选择合适的DSPIC芯片,考虑计算能力、存储容量、功耗等因素。
2.CAN总线接口电路设计设计CAN总线接口电路,包括电气层和协议层。
电气层需要设计CAN收发器和电平转换电路,确保CAN总线与DSPIC芯片之间的电气兼容性;协议层需要实现CAN总线的数据通信和控制逻辑。
3.外围电路设计根据实际需要添加外围电路,如时钟电路、稳压电路、输入输出接口、扩展接口等。
四、软件设计1.DSPIC芯片固件开发使用C语言或汇编语言等进行DSPIC芯片的固件开发,包括初始化设置、各种算法实现和控制逻辑编写。
2.CAN总线协议栈开发设计CAN总线协议栈,实现CAN数据通信和控制逻辑,包括消息的发送和接收、错误处理、帧过滤等功能。
3.软硬件接口驱动开发根据硬件设计的接口,编写驱动程序,并提供统一的API接口,方便上层应用程序调用。
五、测试与验证1.单元测试对芯片固件、CAN协议栈和硬件接口驱动进行单元测试,验证其功能正确性。
2.集成测试将各个模块集成到一起进行测试,验证整个控制模块的性能和稳定性。
3.系统测试将控制模块连接到实际系统中进行测试,验证其在实际环境下的可靠性和适应性。
基于DSP的CAN总线通用的监控系统
关 键词 : AN总线 ; S C D P控 制 器 ; 监控 系统 ; 步 串行通 信 异 中图分 类 号 : P 3 T 2 文献 标 识码 : 文章 编号 :0 0—8 2 (0 6 0 0 4 0 B 10 8 9 2 0 )7— 0 4— 3
Un v r a o t rng & Co t o y t m s d o P’ i e s lM n o i i n r lS se Ba e n DS S CAN
2 oeeo uo ai , un dn nvrt f eh o g, u ghu5 09 , h a .C l g f tm t n G ag ogU i sy o c nl G a zo 0 0 C i ) l A o ei T o y n 1 n
Absr c : s d o h MS 2 F 40 t a t Ba e n t e T 3 0L 2 7 CAN du e CAN s wo k d o tf rP t n tra d c nt lmu t— mo l , i r e u o C o mo io n o r li o c n r le s Th r wa e o siu e nd o t r mp e n a in o r tc lc n e o r ito c d. e o tolr . e ha d r c n tt ts a s f wa e i l me tto f p o o o o v min a e n r du e T h mo io n n tr g& c n r ls se i e ug e n e l e i o to y t m s d b g d a d r a i d. z
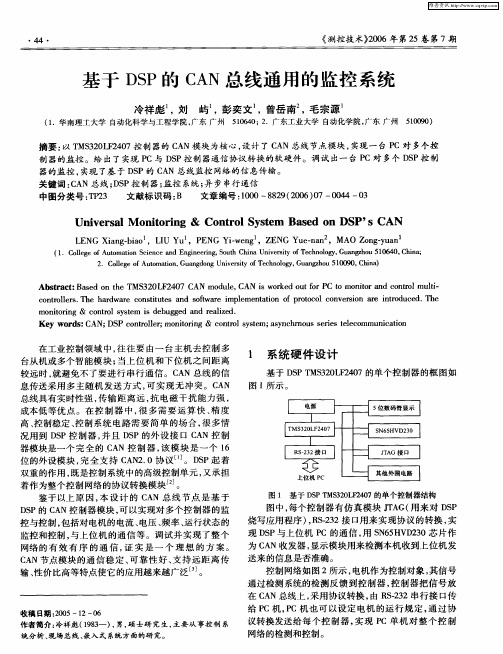
摘 要 : T 3 0 F 4 7控 制 器的 C N模 块为核 心 , 计 了 C N 总线 节点模 块 , 以 MS 2 L 2 0 A 设 A 实现 一 台 P C对 多个控 制 器 的监控 。给 出了 实现 P C与 D P控 制 器通信 协议 转换 的软 硬 件 。调 试 出一 台 P S C对 多个 D P控 制 S 器的监 控 . 实现 了基 于 D P的 C N 总线监 控 网络 的信 息传 输 。 S A
基于DSP的CAN总线系统设计与实现

Electronic Component&Device Applications doi:10.3969/j.issn.1563-4795.2010.02.02266Vol.12No.2Feb.2010第12卷第2期2010年2月 2010.2ElectronicComponent&DeviceApplications度、采样次数等参数。
当完成以上CAN配置之后,还需按照图5所示的流程图来完成数据的发送与接收配置,同时初始化邮箱。
邮箱初始化主要是设置邮箱的标识符和控制域(即发送的是远程帧还是数据帧),以及对相应的邮箱赋初值。
数据接收时,所接收到的信息的标识符必须与相应的接收邮箱的标识符相同,否则该信息将被滤除。
这里,数据的发送与接收请求均采用标志位查询方式。
按照以上步骤设置好后,接着就是对数据的发送与接收请求进行配置。
数据接收可采用中断方式,中断配置可在主程序流程中进行配置。
正确配置中断入口地址及中断函数,并开放CAN接收中断后,还要分别配置不同的数据帧,包括标准帧和扩展帧,以及数据帧和远程请求帧。
图6表示为上位机接收数据的调试界面。
可以看到,CAN通信和下位机间的数据通信,可以写数据并发送给下位机,同时也可接收下位机的数据来验证电路及软件的正确性。
5结束语利用TMS320F2812内嵌的eCAN模块可使得硬件电路设计更为简单而可靠,而且性能也较已有的DSP内嵌的CAN控制器有较大的提高。
同时,采用C语言编程,则可使得程序的设计难度降低,提高程序的可维护性并缩短开发时间。
(a)CAN发送流程(b)CAN接收流程图5CAN系统的发送和接收流程(上接第65页)68。
基于DSP和CAN总线的电机监控系统设计
2 系统 方 案 设 计
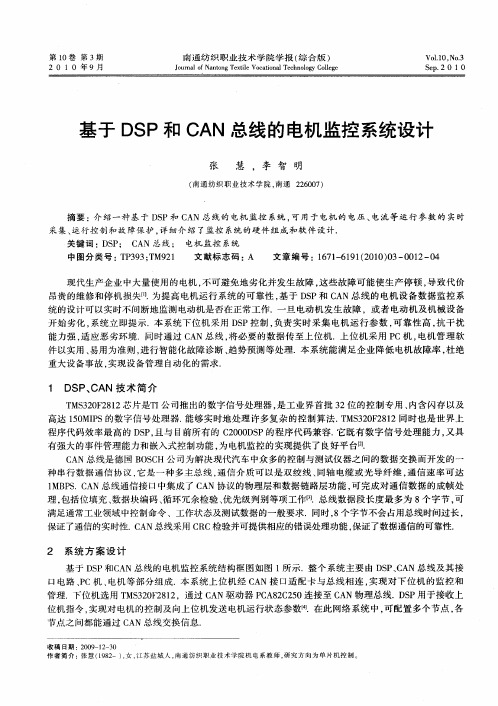
基 于 D P和C S AN总 线 的电机监 控系统 结 构框 图如 图 1 示.整个 系统 主要 由 D P C N总线 及 其接 所 S 、A
口 电路 、 c机 、 P 电机 等部分 组 成 . 系统 上 位机 经 C N接 口适 配卡 与总 线 相连 , 现 对 下位 机 的 监控 和 本 A 实 管 理.下位机 选 用 T 3 0 2 1 ,通过 C N驱 动器 P A 2 2 0连 接至 C N物 理总 线 . S MS 2 F 8 2 A C 8C5 A D P用于 接收 上 位 机指令 , 实现 对 电机 的控 制及 向上 位机发 送 电机运 行状 态参数 在 此 网络 系统 中 , . 可配 置 多个 节点 , 各 节点之 间都能 通过 C N总线 交换 信息 . A
3 硬 件 设 计
终端 匹配 电阻
件 以实 用 、 易用 为准 则 , 进行 智 能化故 障诊 断 、 势预 测等处 理.本 系统 能 满足 企业 降 低 电机故 障率 , 绝 趋 杜
重 大设 备事故 , 实现 设备管 理 自动化 的需求 .
1 D P CA 技术 简 介 S 、 N
T 3O 2 1 片是T 公 司推 出 的数字信 号处 理器 , 工业 界首 批 3 MS 2 F 8 2芯 I 是 2位 的控 制专 用 、 内含 闪 存 以及
第 l 0卷 第 3 期 2 0 1 0 年 9月
南通纺 织职 业技 术学 院学报 ( 合版 ) 综
J un l fNa tn xi c t n lTehn lg l g o ra no gTetl Vo ai a c oo yCol e o e o e
V0 _0 No3 l . . 1 S p 2 0 10 e .
基于DSP的CAN总线控制系统的设计

计算机技术 化工自动化及仪表,2006,33(6):50~52 Contr ol and I nstru ments in Che m ical I ndustry 基于D SP的CAN总线控制系统的设计陈晓侠,陆 坦,王立明(大连交通大学,辽宁大连116028) 摘要: 以SHCAN2000控制系统现场智能测控组件的升级为背景,介绍以DSP为现场智能测控单元微处理器的新型智能测控组件对系统控制功能及通信功能的改善。
详细介绍T MS2812信号处理器的eC AN模块以及其与C AN总线之间的通信,并给出其通信部分硬件和软件的设计方法,采用OPC服务器为上、下位机的I/O驱动程序,满足了现场智能仪表的计算复杂性和系统通信的时实性。
关键词: DSP;eCAN;OPC服务器 中图分类号:TP3 文献标识码:B 文章编号:100023932(2006)06200502031 引 言本文是在原有的基于CAN总线技术的SHCAN2000型现场总线控制系统的基础上进行通信功能和现场智能单元控制功能的升级。
SHCAN2000上位机监控软件采用的是I ntellution公司的F I X I/O驱动程序开发工具开发的专用驱动程序,只适合于F I X监控组态软件和单一厂家开发的下位机控制芯片,如果更换下位机就必须为上位机F I X监控软件重新开发I/O驱动,如更换监控组态软件就必须为其重新开发针对监控软件和下位机芯片的I/O驱动,大大限制了系统的集成性和通用性,给开发人员增加了极大的困难。
SHCAN2000系列智能仪表硬件采用MCS251系列单片机,外围电路大,功耗多。
为此,本课题组开发了基于T MS2812DSP处理器为核心的新型智能测控组件,并采用了OPC服务器实现I/O驱动,弥补了SHCAN2000系统中的缺陷。
2 改进后系统(MMB)的体系结构MMB现场总线控制系统采用三层体系结构,即操作站—CAN总线网络—现场控制单元。
基于DSP与CAN总线的跟踪伺服控制器设计

基于DSP与CAN总线的跟踪伺服控制器设计目前的光电跟踪伺服系统大都采纳PC/104结构,它是通过主控计算机完成对目标捕捉跟踪功能,但是组成实际应用的跟踪伺服系统还要叠加多块板卡,不仅增大了系统体积,而且精度难以提高,花费昂贵。
而正以其高速的数据处理能力,丰盛的片内外资源、便利的开发环境,以及低廉的价格在越来越多的计算控制系统中得到应用。
化是工业控制系统的一个进展方向,它在可适用范围、可扩展性、可维护性以及抗故障能力等方面较集中式控制系统有显然的优越性。
因此,本文结合光电跟踪伺服系统的特点,提出一种基于DSP与结构的伺服控制器。
在高速光电跟踪系统中,对伺服系统的实时性、精确度和稳定性都有很高的要求。
实际应用中环境比较复杂,有大量的信息传递,并且需要对电机转速采取精确控制,从而对伺服控制器的多路通信能力、迅速运算能力和抗干扰能力都有较高的要求。
因为具有高度灵便的可配置性和规律时序控制能力,所以这里采纳公司Cyclone系列FPGA为辅助处理器,设计了以TI公司的32位定点数字信号处理器TMS320F2812为核心,通过CAN现场总线与上位机通信的跟踪伺服控制器,并综合阐述了该控制器的功能、硬件设计和软件流程。
该控制器具有两路双极性模拟信号输入,两路单极性模拟信号输入,四路双极性模拟信号输出,可满足控制两个三相的12路输出,一路CAN总线,三路RS422和一路RS232串行通信口,具有较强的运算能力和数据通信能力,是良好的数字控制系统试验平台。
1 总体结构设计TMS320F2812是一款专为电机控制所设计的芯片,片上集成了丰盛的片内外设资源。
设计时充分利用了这一特点,简化了外围,降低了系统的功耗。
按照电路中各部分所实现的功能,将囫囵控制器大体分为三个部分:处理器部分、外围通信接口部分和模拟信号处理部分。
控制器的总体硬件结构图1所示。
第1页共4页。
基于DSPIC芯片和CAN总线的控制模块研发与设计

向用户提供 了存储容器服务 、备份服务、归档服务和记录 旗下资源并推 出来阿里金融云服务。其实,这就是现在基本
管理服务等等,大大方便 了使用者对资源的管理 。
普及 了的快捷支付 ,因为金融与云计算的结合,现在只需要
CAN总线是用于过程控制和现场设备互联的串行通信网络, 为逻辑 1,也可以称做隐形;用 CA N—H比CAN_L高表示逻辑 0,
相比于其他通信电路,CAN通信在控制应用具有以下优点 : 称为显性,此时通常电压值为 cAN H二3.5V和 cAN I .5v。总
知的谷歌 、微软等大型网络 公司均有云存储 的服务 ,在 国 同时共享互联 网资源,从而解决现有 问题并且达到高效、低
用 “云计算 ”来创建医疗健康服务云平台,实现 了医疗资 源 的共享和医疗范围的扩大 。因为云计算技术 的运用于结
3.4教育云 教 育云 ,实质上是指教育信息化的一中发展。具体 的,
合 ,医疗云提高医疗机构 的效率 ,方便居 民就医 。像现在 教育云可 以将所 需要的任何教育硬件资源 虚拟化 ,然后将
验验证 了控制模块之间通信 的有效及可靠性。
CAN收发器则把 CAN控制器发出的报文帧转换成差分信号送
2 CAN总线通信在 多机之 间,这两条信号线便组成了 CAN
2.1 CAN总线的优势
总线,CA N H与 CAN L静态时均为 2.5v左右,此时状态表示
堡: 塑垦 !±! 堑 !查 !塑 匾
基 于 DSP l C芯片和 CAN总线 的控制模块研 发 与设计
吴 琼 (广 东理 工 学 院 广 东 肇 庆 5 2 6 1 0 0)
基于DSP和CAN总线的直流电机在线监控系统设计
基于DSP和CAN总线的直流电机在线监控系统设计作者:徐良友来源:《中国科技博览》2013年第28期[摘要]本文提出了一种基于DSP和CAN总线技术的直流电机监控系统设计方案,按照该方案设计的系统结构简单,使用方便,精确度及性价比均较高。
同时,CAN总线的分布式结构可使系统扩展至多个电机的同时检测,在多电机驱动机构中便于同时进行多个电机性能检测及分析比较。
[关键词]DSPCAN总线直流电机中图分类号:TP336 文献标识码:TP 文章编号:1009―914X(2013)28―0579―02引言直流电机控制系统通常采用成品化的驱动器及控制器,此类系统不仅价格昂贵且缺乏一定灵活性。
随着现代直流驱动机械复杂性不断提高,当需要对多个电机实施监控时尤显不便。
近年来,数字处理芯片运算能力及可靠性均得到很大程度的提高,以数字信号处理芯片为控制核心的数字化电机监控系统正逐步替代传统仿真器件电机控制器。
CAN总线作为新一代串行通信总线,具有实时性及抗干扰能力强,传输距离远等特点,基于CAN总线的监控系统可有效支持系统分布式结构,通过CAN网络可以构成针对多部电机的高精度监控系统。
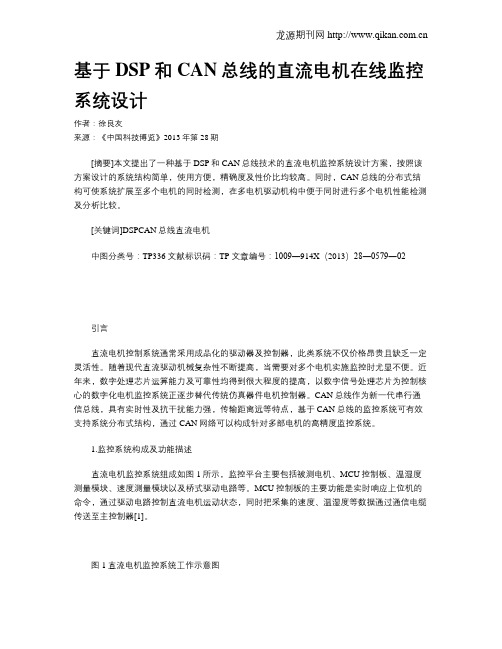
1.监控系统构成及功能描述直流电机监控系统组成如图1所示,监控平台主要包括被测电机、MCU控制板、温湿度测量模块、速度测量模块以及桥式驱动电路等。
MCU控制板的主要功能是实时响应上位机的命令,通过驱动电路控制直流电机运动状态,同时把采集的速度、温湿度等数据通过通信电缆传送至主控制器[1]。
图1直流电机监控系统工作示意图上位机部分主要包括DSP实验板、手动操作面板、液晶显示模块以及上下位机通信模块等。
DSP实验板及其外围电路的主要任务是响应PC控制终端的命令并协调处理MCU采集的现场数据,通过总线通信机制和测试平台互通有无。
操作面板可通过按键操作进行手自动模式切换,手动模式下可直接对电机进行动作状态控制。
2.基于CAN总线的通信结构控制局域网络总线CAN(Control Area Network)由德国Bosch公司推出,最初用于汽车内部各传感单元和执行单元间的数据通信。
基于DSP和CAN总线的步进电机控制系统研究

0 ? @
øy!&R/0b! ã÷ X [ Üÿc `Ü Ú@ j z &÷, @ Ü" `Ü Ú µ P= ã÷ @f a c v ~, @Üì ôµP=ã÷@öcv ~, P kþ ã÷ ö $X OP ´ÃÄ @ A ; a×, ø y! & N2 µ ÔÕ & 8 @,a ] 1 。 &¬7-Ô, zi20a&å¿óF[ /!"%&@, a & X [ Ì # X@ \ ´@ jÕÌ°²、 Kû@å¿Z ô¾Ï F ì å ¿ óF x I M i 。Ï k D S P ) [ , TM S 3 2 0 L F 2 4 0 7 A ½Á T Iª ]@/ í . ) 1 X@ Ö c 6 Ü äj a & X [ Ì #, / ôû、 ¾ z i2! &a & ; A D Üÿô * Ij, å¿。 Á . , û ø y ! & @ å ¿ ± ² 8 Z ô, ¬«X OP. = ø y! & å ¿ óF TM S 3 2 0 L F 2 4 0 7 A Á U , , @Ô; ji C ¡ %& L c.u Ü&µø y! & A N å¿óFñV@a[X。
] 6 。Áõ£ÑEå ¿ ½ h, ([ ¬óF ø y! &67a
ÑEý¡yzå¿, 75q。
73 ã÷3Á#!}
7 C H 2 5 0-c=ÇÕ8½6Q, T M S 3 2 0 L F 2 4 0 7 A
75 aÑEý¡
·1 1 3·
2( '3
! "
, Ï V fô ® u, ø y! &t ¼×Viøaq2Û; 。 ½| M ø C , ¬óF ø y! & 8 ½ ×, *ìöÁ4 rûö 0 0H z ; , 。 3 ! & ô ®a Ð a ÂÖç× 2 0 0H z M= 7 C= 2 , #öÁ1 ÚD Miä× 0MH z S P ç]=b4Sö, #1@O3ö"Á6 $h-ô®u P 4× , WM X[ öx@ä×#1_)¥e # 5 T | 1 q。 1 P R, 9¤jz×, $ PÞ |qkþ T å¿P 1 P R @ ' æ5, -P DW$X ´ SEI ú i C WM X[@ö ; P U @× ,ûóFHô。 V,
基于DSP的电源监测综合实验设计

Telecom Power Technology设计应用的电源监测综合实验设计刘文程,应亚萍,叶红红,徐淼锋(浙江工业大学之江学院,浙江绍兴设计一种基于数字信号处理(Digital Signal Processing,DSP)的电源监测综合实验,分析实验总体方案,包括电源电路模块设计、电机驱动模块设计、采集及显示模块设计、温度保护模块的设计等,并设计了实验程序。
经过测试,验证了该实验设计的实用性和可行性。
学生通过学习电源检测综合实验,开拓了思路,提高了动手能力,培养了综合应用能力和创新力,增强了分析与解决问题的能力。
数字信息处理(DSP);电源监测;综合实验Comprehensive Experimental Design of Power Monitoring Based on DSPLIU Wencheng, YING Yaping, YE Honghong, XU Miaofeng(Zhijiang College of Zhejiang University of Technology, ShaoxinAbstract: A comprehensive experiment of power detection based on Digital Signal Processing (DSP) is designedin this paper. The whole scheme of the experiment consists of power circuit module, motor drive module, acquisition module, display module, and temperature protection module. Meanwhile, relevant programs in the experiment are also图1 系统结构1.1 电源电路模块设计DSP系统电源电路设计对于整个系统而言至关重要,是必不可少的关键部分。
一种基于DSP芯片与CAN总线的电源监控系统设计
一种基于DSP芯片与CAN总线的电源监控系统设计
电源技术发展的方向之一是运用电源模块并联技术实现功率合成,组成积木式、智能化的分布式大功率电源系统。
为使并联的各个模块协调工作,对分布式电源系统进行可靠的监控是电源技术发展的热点之一。
目前对分布式电源监控普遍采用的做法存在的问题主要在数字化程度不高,速度不够快,精度和可靠性不够高等问题,然而在工业控制中电源控制显的十分的重要。
1电源监控系统总体设计
传统电源系统并联系统多是采用模拟的方法实现模块间的电流均流的,但存在着一些共同的不足:必须有均流控制母线,需要增加专门的均流控制器。
且均流母线属于模拟电平信号线,抗干扰能力较弱;难于保证电源模块调制频率的一致。
同时,当多个子并联电源单元组成分布式电源系统时,对整个系统进行实时、准确的统一监控和调度意义重大。
电源监控实现的前提条件就是能在各子单元和监控单元之间通信,本系统设计就使用了在工业场合经常使用的具有存在自适应、自保护功能脆强,抗干扰能力强的CAN总线。
本系统由8块控制单元和1块中央监控单元组成。
控制单元和监控单元之间通过CAN总线进行数据传输,各单元自成一个CAN节点。
每个单元的核心处理器都是TI公司的TMS320F2812 DSP芯片。
每个控制单元有一个用户而板与之对应。
控制单元和面板完成每层电源模块的电源参数采集,均流基准输出,“遥/本采”及“遥,本调”切换,面板状态信息显示:中央监控单元完成对各层控制单元采集数据的实时汇总显示以及对各层电源模块的“遥调”,系统整体结构如图1所示。
基于CPLD的DSP微处理器与CAN控制器接口设计

基于CPLD的DSP微处理器与CAN控制器接口设计近几年来,随着低价位芯片的浮现,他已被广泛应用到控制与测量领域中。
国内的DSP芯片以TI公司的TMS320系列为主流。
这种微处理器对外的数据和地址结构形式为非多路复用方式,不能与多路复用形式的外围接口芯片(如CAN控制器SJA1000)挺直相连。
国内、外也没有一款专用集成芯片来实现非多路复用方式到多路复用方式的转换。
文献[1]提出了一种转换办法,是将DSP的数据线作为CAN控制器的数据地址复用线,用DSP的地址线A0作为地址、数据挑选线。
A0=1时,地址有效;A0=0时,数据有效,即用奇数地址传送地址,用偶数地址传送数据。
虽然此办法实现起来容易,但在编程时,程序员必需考虑发送的数据何时作为CAN控制器的地址,何时作为CAN控制器的数据,没有从根本解决非多路复用方式到多路复用方式的转换。
本文以TMS320F206与SJAl000衔接为例,提出采甩复杂可编程规律器件,彻低用硬件实现非多路复用方式到多路复用方式的转换。
2 多路复用总线的信号和时序2.1 SJAl000接口的主要信号解释CAN控制器SJAl000提供的微处理器接口方式为典型INTEL或MOTOROLA地址数据多路复用总线模式,主要信号有地址数据信号AD7~AD0,地址选通信号ALE,片选信号CS,读信号RD,写信号WR,模式挑选信号MODE。
当MODE=1时,为INTEL模式;当MODE=0时,为MOTOROLA模式。
后面描述的地址数据多路复用总线模式均为INTEL模式。
图1,图2分离为INTEL模式读、写周期时序[2]。
AD7~AD0引脚在ALE有效时,传送的是地址信号,在RD或WR有效时,传输的是数据信号。
2.2 SJAl000时序分析以SJAl000的读时序(图1)为例,解释在设计转换桥时,多路复总线的各信号必需满足时光参数要求。
ALE的脉冲宽度tw(AL)最小为8 ns;第1页共4页。
基于DSP和CAN总线的电机监控系统设计
基于DSP和CAN总线的电机监控系统设计张慧;李智明【摘要】介绍一种基于DSP和CAN总线的电机监控系统,可用于电机的电压、电流等运行参数的实时采集、运行控制和故障保护,详细介绍了监控系统的硬件组成和软件设计.【期刊名称】《南通纺织职业技术学院学报》【年(卷),期】2010(010)003【总页数】4页(P12-15)【关键词】DSP;CAN总线;电机监控系统【作者】张慧;李智明【作者单位】南通纺织职业技术学院,南通226007;南通纺织职业技术学院,南通226007【正文语种】中文【中图分类】TP393%TM921现代生产企业中大量使用的电机,不可避免地劣化并发生故障,这些故障可能使生产停顿,导致代价昂贵的维修和停机损失[1].为提高电机运行系统的可靠性,基于DSP和CAN总线的电机设备数据监控系统的设计可以实时不间断地监测电动机是否在正常工作.一旦电动机发生故障,或者电动机及机械设备开始劣化,系统立即提示.本系统下位机采用DSP控制,负责实时采集电机运行参数,可靠性高,抗干扰能力强,适应恶劣环境.同时通过CAN总线,将必要的数据传至上位机.上位机采用PC机,电机管理软件以实用、易用为准则,进行智能化故障诊断、趋势预测等处理.本系统能满足企业降低电机故障率,杜绝重大设备事故,实现设备管理自动化的需求.1 DSP、CAN技术简介TMS320F2812芯片是TI公司推出的数字信号处理器,是工业界首批32位的控制专用、内含闪存以及高达150MIPS的数字信号处理器.能够实时地处理许多复杂的控制算法.TMS320F2812同时也是世界上程序代码效率最高的DSP,且与目前所有的 C2000DSP的程序代码兼容.它既有数字信号处理能力,又具有强大的事件管理能力和嵌入式控制功能,为电机监控的实现提供了良好平台[2].CAN总线是德国BOSCH公司为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维,通信速率可达1MBPS.CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作[3].总线数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求.同时,8个字节不会占用总线时间过长,保证了通信的实时性.CAN总线采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性.2 系统方案设计基于DSP和CAN总线的电机监控系统结构框图如图1所示.整个系统主要由DSP、CAN总线及其接口电路、PC机、电机等部分组成.本系统上位机经CAN接口适配卡与总线相连,实现对下位机的监控和管理.下位机选用TMS320F2812,通过CAN驱动器PCA82C250连接至CAN物理总线.DSP用于接收上位机指令,实现对电机的控制及向上位机发送电机运行状态参数[4].在此网络系统中,可配置多个节点,各节点之间都能通过CAN总线交换信息.图1 电机监控系统结构框图3 硬件设计本文选用TI公司的TMS320LF2812芯片作为本系统控制核心,内置16路A/D 以及16路SVPWM信号生成模块,它是定点DSPC2000平台系列的一员,专用于电机控制的芯片,有如下特点[2]:①TMS320F281x系列DSP采用高性能的静态CMOS技术;主频达150MHz(时钟周期6.67ns);低功耗设计;Flash编程电压3.3V;② 片上16个通道,10位模数转换器,自动排序;③ 双事件管理器多重PWM和片上捕捉通道;④ DAC7654四通道数模转换器;⑤带RS232驱动器的片上UART;⑥带驱动的CAN接口;⑦发光二极管指示灯;⑧4个扩展接口(数据地址、I/O、控制);⑨ 为可选的评估提供板上1个JTAG接口;⑩ 5伏电压输入(3.3V板上调压器).这些特点也使得DSP成为当前电机控制中的主流控制芯片,有能力承担电机监控系统功能的实现.CAN收发器选用SN65HVD251(U702)芯片,此芯片与传统CAN收发器PCA82C250兼容,且支持+3.3V电压,可直接与TMS320F2812连接.为提高通信质量,中间需用光耦进行隔离.设计时将DSP芯片的两个引脚CANRX和CANTX通过高速光耦隔离芯片HCPL_063A (U701、U703)接到总线收发器SN65HVD251(U702)上,以提高系统的抗干扰能力.为了增强CAN通讯的可靠性,CAN总线网络的两个端点之间要加入终端匹配电阻.电机电流检测采用的霍尔电流传感器型号为ACS706-15,它是一种基于霍尔效应的双向线性电流传感器,具有低成本、高精确、小封装以及良好的隔离特性,使得其比较适合应用于电机驱动系统,这样既解决了使用传统高精度传感器成本高、体积大的问题,又避免了采用无电流传感器方法带来的电流估算难题.所设计的驱动器采用两个电流传感器测量电机两相电流,见图2.电机电压检测电路由接在整流器输出端的霍尔电压传感器LV28-P来检测直流母线电压,它的原理是原边电压通过原边电阻转换为原边电流,该电流产生的磁通量与霍尔电压经放大产生的副边电流通过副边线圈所产生的磁通量相平衡.副边电流精确地反映原边电压.LV28-P工作电压为±15V,为了在额定原边电流上使传感器具有最佳精度,应尽量准确选择原边电阻R,以便测量与10mA的原边电流相应的电压.4 CAN协议及软件设计CAN通讯协议主要描述设备之间的信息传递方式.CAN层的定义与开放系统互连参考模型(OSI)一致,每一层与另一设备上相同的那一层通讯,如图3所示.CAN2.0协议中定义了模型的最下面两层:数据链路层和物理层.在物理层,CAN能够灵活选用多种物理介质,例如双绞线光纤等.只要物理驱动器是在“开集电极”而且每个结点都能够监听到它自己以及其他所有结点,那么CAN就能够工作.数据链路层定义了报文传输的格式和定时协议.CAN总线的帧数据有两种:标准CAN格式和扩展CAN格式.它们定义了报文的优先权以及报文传输的类型.应用层直接从数据链路层获取数据或直接向链路层写数据.结构层次少,有利于系统中实时控制信号的传送.应用层协议一般由CAN用户定义成适合特别应用领域的任何方案.图2 电流检测电路软件采用自顶向下、模块化的结构化程序设计,首先建立软件的框架结构,将整个软件划分为几个相对独立的大的模块,每个模块实现一定的功能,然后对每个模块逐步细化,直到完成整个软件的编制.主程序是软件的主体框架,它的主要任务是在条件满足的时候调用其他子功能模块,执行各个功能模块的任务.系统主程序包括初始化和主循环两部分.控制软件进行初始化,设置TMS320F2812的各种功能模块,以设定系统各个功能模块的工作方式.初始化工作完成后,系统进入主循环状态,判断系统状态,处理保护信号,发送系统信息,接收控制信息,等待各种中断产生,进入中断服务子程序以完成相应功能.下面是系统控制寄存器初始化程序:图3 CAN协议结构主循环中首先获取系统状态信息(数据量、开关量等),调用数据处理程序来完成参数的计算,其次处理报警信息,然后获取控制信息并执行相应的操作,再次传输数据到上位机进行进一步的处理,最后将断路器状态从LED上显示.此时一个循环结束,再开始下一个循环.主程序流程图如图4所示.CAN模块的主要任务是将测控节点的状态(包括传感器及设备的工作情况)发送到CAN总线上以便上位机完成监测监控的功能,它是联系上位机和下位机的纽带,是构成电机监控系统的关键.CAN模块的软件设计主要由三部分组成:CAN模块的初始化、发送程序和接收中断程序.其中初始化子程序在DSP主程序的初始化部分进行调用,发送子程序在DSP主程序的循环部分进行调用,接收中断程序在ECAN1INT产生中断时进行调用.发送子程序的流程图如图5所示.在发送数据之前应对发送邮箱进行初始化配置,该过程在CAN通讯初始化子程序中.首先清邮箱的TRS位,清CANME中的相应位来禁用邮箱,然后向邮箱写入消息标识符(ID),最后置CANME中的相应位来使用邮箱,此时发送邮箱的配置过程结束.配置完成后,如果要发送消息,则首先将消息写入邮箱的数据域,然后置发送请求寄存器中相应的位TRSn来启动消息的传输,最后等待相应邮箱的发送响应标志被置位.当信息发送成功后,CAN模块置位该标志.当成功发送消息后,TRSn被模块复位为0,同时对发送响应位置位(使该位清0),以确保下一次的传送.图4 主程序流程图图5 发送子程序流程5 结语根据电机监控系统的功能需求和网络拓扑结构,其整体设计如图6所示.该系统的总体结构由两层构成,上位机通过 PC-CAN适配卡接入CAN总线,能够监视整个系统的工作和下达命令给DSP控制器.下层的控制器通过挂在CAN总线上的收发节点与CAN总线上的其他节点交换信息,并且根据上位机发送的控制命令完成监控.该监控系统能实现电机运行中各参数的实时数据及曲线、历史数据及曲线的显示,从而对电机工作情况进行实时监控,系统如图7所示.图6 监控系统整体设计图7 实时参数显示曲线图本文所提出的电机监控系统设计为电机设备维护管理提供了一个有效的工具手段,能为电机安全可靠运行提供一定的保证.该系统采用先进的DSP微处理器和CAN总线技术,能准确检测电机参数及运行工况,为电机故障诊断、预警以及经济运行分析提供良好的技术支持.参考文献:[1]Changting Wang,Robert X·Gao.A Virtual Instrumentation System for Integrated Bearing Condition Monitoring[J].IEEE Transaction on Instrument and Measurement,2000,49(2):256-263.[2] 徐科军.TMS320×281×DSP原理与应用[M].北京:北京航空航天大学出版社,2006:8.[3]唐建清,邹国霞.基于CAN总线的嵌入式数控系统网络化研究[J].制造业自动化,2009,31(10):65-67.[4]孙兵,何瑾,陈广厦.基于DSP的CAN总线与以太网互联系统研制[J].仪器仪表学报,2008,29(2):377-380.。
基于DSP和CAN总线的直流电机在线监控系统设计
基于DSP和CAN总线的直流电机在线监控系统设计摘要:本文提出了一种基于DSP和CAN总线技术的直流电机监控系统设计方案,监控系统以TMS320LF2407A 为主控制器,结合霍尔测速模块、光电隔离驱动电路、串行通信接口电路等外围电路分别实现电机测速、驱动和上下位机全双工通信等功能。
该系统结构简单,使用方便,精确度及性价比均较高。
同时,CAN总线的分布式结构可使系统扩展至多个电机的同时检测,在多电机驱动机构中便于同时进行多个电机性能检测及分析比较。
关键词:DSP;CAN总线;直流电机Abstract:The DC motor monitoring system based on embedded DSP-TMS320LF2407A and CAN bus was in troduced, whose moti on mon itori ng system uses TMS320LF2407A as the main controller, combines with Hall sensor module, optically coupled isolati on drive circuit, serial com muni cati ng circuit and other peripheral circuits so as to realize the speed measurement, drive and full duplex com muni cati on betwee n PC and DSP respectively. The results of experime nt show that the module is simple and advaneed performance price ratio. At the same time, multi-test was possible because the CAN bus was expa nsibility. This test CAN use for comparis on an alysis for differe nt motors at the same time. And multi-drive n test was possible un der this test method.Keywords: DSP; CAN bus; DC motor0引言直流电机控制系统通常采用成品化的驱动器及控制器,此类系统不仅价格昂贵且缺乏一定灵活性。
基于DSP的通信电源监控系统的设计

基于DSP的通信电源监控系统的设计
刘敏;李永江;刘泽军
【期刊名称】《电源技术》
【年(卷),期】2013(037)012
【摘要】随着电力电子技术的发展,各行各业对电源系统的智能化要求也越来越高.针对通信电源系统的特殊环境与要求,为了满足通信企业对电源系统的功能要求,在
充分考虑系统可靠性的基础上,开发了一套基于DSP的分布式通信电源监控系统.该系统以DSP芯片和CAN通信为核心,充分利用了DSP高速、实时、外设集成度高、扩展性强的特点和CAN总线通信高安全性和抗干扰性等优点.针对蓄电池的使用与维护,设计了一套针对蓄电池特点的自动管理程序,使蓄电池始终保持满容量,较好地延长了蓄电池的使用寿命.
【总页数】3页(P2214-2216)
【作者】刘敏;李永江;刘泽军
【作者单位】石家庄信息工程职业学院,河北石家庄050035;石家庄信息工程职业
学院,河北石家庄050035;河北师范大学,河北石家庄050024
【正文语种】中文
【中图分类】TM91
【相关文献】
1.基于 DSP 的船舶电力系统智能通信电源设计 [J], 彭仁松
2.基于DSP的通信电源监控系统的研究 [J], 李慧;马媛;张晓博;康丽杰
3.基于DSP的高频加热电源能量监控系统设计 [J], 刘敏;邓海丽;李永江
4.基于DSP的软开关数字化通信电源及其监控系统设计 [J], 范凌云
5.基于DSP的通信电源监控系统的设计 [J], 俞斌;何志勇
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种基于DSP芯片与CAN总线的电源监控系统
设计
电源技术发展的方向之一是运用电源模块并联技术实现功率合成,组成积木式、智能化的分布式大功率电源系统。
为使并联的各个模块协调工作,对分布式电源系统进行可靠的监控是电源技术发展的热点之一。
目前对分布式电源监控普遍采用的做法存在的问题主要在数字化程度不高,速度不够快,精度和可靠性不够高等问题,然而在工业控制中电源控制显的十分的重要。
1 电源监控系统总体设计
传统电源系统并联系统多是采用模拟的方法实现模块间的电流均流的,但存在着一些共同的不足:必须有均流控制母线,需要增加专门的均流控制器。
且均流母线属于模拟电平信号线,抗干扰能力较弱;难于保证电源模块调制频率的一致。
同时,当多个子并联电源单元组成分布式电源系统时,对整个系统进行实时、准确的统一监控和调度意义重大。
电源监控实现的前提条件就是能在各子单元和监控单元之间通信,本系统设计就使用了在工业场合经常使用的具有存在自适应、自保护功能脆强,抗干扰能力强的CAN总线。
本系统由8块控制单元和1块中央监控单元组成。
控制单元和监控单元之间通过CAN 总线进行数据传输,各单元自成一个CAN节点。
每个单元的核心处理器都是r11公司的TMS320F2812 DSP 芯片。
每个控制单元有一个用户而板与之对应。
控制单元和面板完成每层电源模块的电源参数采集,均流基准输出,“遥/本采”及“遥,本调”切换,面板状态信息显示:中央监控单元完成对各层控制单元采集数据的实时汇总显示以及对各层电源模块的“遥调”,系统整体结构如图1所示。
图1系统控制单元结构图
2 系统中央监控单元与外围电路设计
中央监控单元可实现模块信息的汇总显示和对各层电源的“遥调”。
各层控制单元采集和处理的数据经CAN总线传送给中央监控单元。
这些信息可以在OLED屏幕上分页显示,可接受来自键盘的操作自由选择要显示的信息。
“遥调”值也是通过键盘输入得到。
本系统选用的处理器是TI公司的TMS320F2812,此处理器是一款32位定点数字信号处理器,处理速度可以达到150MIPS。
该处理器还集成了128KB的Flash存储器和128位的密码保护机制,从而大大改善了应用的灵活性。
同时片上还集成了16通道高性能12位ADC单元,提供了两个采样保持电路,可
以实现双通道信号同步采样,中央监控单元结构图如图2所示。
中央监控单元结构图
2.1ADC模块电路设计
TMS320F2812内部的ADC模块是一个12位带流水线的模数转换器,模数转换单元的模拟电路包括前向模拟多路复用开关(MUXs)、采样/保持(S/H)电路、变换内核、电压参考以及其他模拟辅助电路。
模数转换单元的数字电路包括可编程转换序列器、结果寄存器、与模拟电路的接口、与芯片外设总线的接口以及其他片上模块的接口,ADC模块接线如图3所示。
图3 ADC模块接线图
2.2 eCAN模块电路设计
CAN总线是一种多主串行通信方式,具有高级别的安全性,可以有效地支持分布式适时控制。
CAN总线具有较强的抗干扰能力,可以在强噪声干扰和恶劣工作环境中可靠的工作TMS320F2812的CAN控制器为DSP提供完整的CAN协议,减少了通信时的处理器开销。
eCAN模块主要由CAN协议内核fCPK)和消息控制器构成。
CAN协议内核主要完成两个功能:根据CAN协议对CAN总线上接收到的消息进行解码,向接受缓冲发送解码后的消息:CAN协议内核的另外一个功能是根据CAN协议在CAN 总线上传送消息。
消息控制器对CAN协议内核接收到的消息进行判定,决定留给CPU使用还是丢弃,消息控制器还根据消息的极性将下一个消息发送到CAN协议内核(CPK)。
CAN 通信电路中,其中Rx和Tx分别是DSP的GPIOF7和GPIOF6引脚。
上电初始它们默认为通用I/O引脚,通过软件配置町实现为eCAN模块接收和发送数据。
本系统使用的是德州仪器公司生产的SN65HVD2303.3V CAN收发器,该收发器具有一差分收发能力、斜率控制、具有一抗宽范围的共模干扰、电磁干扰(EMI能力、高输入阻抗和最多允许120个CAN节点等特点。
SN65HVD230具有一高速、斜率和等待3种不同的工作模式。
其工作模式控制可通过设置RS控制引脚来实现。
本设计中,考虑到信息的实时显示和控制以及传送的数据量较大且通信距离不长,为了提高信息的实时显示和控制能力,故采用高速模式。
把RS引脚接地。
由于各个控制单元电气上是隔离的,通过光隔把控制单元和CAN通信部分隔离开来。
为了电平匹配,采用了LVTTL/LVCMOS兼容高速光隔,本设计采用Agilent公司的HCPL-260L。
2.3 DAC电路设计
本设计中,DAC采用ADI公司的DAC8562。
这是一款12位并行DAC供电电源+5V。
由于本系统的外部供电电源也是5V,而12位的精度足以演足系统要求,故采用此款DAC,AC8562和DSP的连接电路见图4所示:
图4 DAC的连接电路图
2.4 OLED显示电路设计
中央监控单元的信息显示采用OLED屏。
有一机发光显示OLED是比液品显示技术更为先进的新—代平板显示技术,是被业界公认为最具发展前景的下一代显示技术。
本设计采用的是Visionox公司的最新产品VGGl2864E-S001。
这是128 x 64行点阵的OLED单色、字符、图形显示模块。
模块内藏64 X 64的显示数据RAM,其中的每位数据都对应于OLED 屏上一个点的亮、暗状态,具有8位行数据接口,读写操作时序,接口电路简单等特点。
OLED模块的访问有直接访问方式和间接访问方式。
直接访问方式下,OLED的读写使能信号E由DSP的XRD和XWE组合产生.间接访问方式下,包括E在内的所有控制信号均接到DSP的I/O口上,通过软件模拟OLED的读写操作时序。
在设计时综合考虑到两种操作方式,把XRD、XWE、DSP的I/O以及OLED的控制信号均引到CPLD内,方便以后的选择和调试。
OLED与DSP的连接电路图见图5。
图5 OLED与DSP的连接电路
3 系统软件设计
程序开始对GPIO,ADC。
ECAN等各个外设初始化,进入死循环。
在循环里,程序启动各个外设并成相应的功能,其程序流程图如图6所示。
图6控制单元软件流程图
CAN总线通信软件的设计包括应用层协议制定和实施、明确各节点的功能以及相互交互的数据、规定数据每—位的确切含义以及要做的响应处理。
CAN节点软件设计的主要分三个部分,即初始化CAN模块、数据发送程序、接收程序。
CAN模块使用之前必须要进行初始化。
首先,设置CANTX和CANRX做为CAN的通信引脚。
在标准的T作模式下,通过把CCR(CANMC.12)置1,使CAN模块工作在初始化模式。
等待当CCL(CANLS.4)为1时,才能执行初始化操作。
初始化操作首先要进行位时间配置寄存器CANBTC的设置。
CANBTC
设置决定总线传输信号的波特率,是CAN控制器模块的核心配置问题,CAN初始化配置流程图如图7。
图7 CAN模块的初始化配置
4 结论
本文创新点:在数字化电源监控逐渐流行的今大,本文提出了一种基TMS320F2812 DSP芯片的针对分布式多模块电源的监控系统,该监控系统以稳定,安全,传输速度高的CAN通信技术作为本系统模块间通信方式,考虑到系统扩展的需要,选用含用大存储空间的处理芯片,方便系统程序的扩展;同时,选片时尽量考虑集成度高,可靠性高,针对系统功能需求的处理芯片和外围功能电路。
本系统注重实际效用,在实际的工业控制中,系统工作稳定。