cc430 c code
CC430F513x/612x/613x(Rev.B)

ECCN 5E002TSPA -Technology /Software Publicly AvailableErrataSLAZ052B–May 2009–Revised May 2010CC430F513x/612x/613x Device Erratasheet1Current VersionDevices R e v :A D C 24A D C 25C O M P 4C P U 18C P U 20C P U 24C P U 25C P U 26C P U 27C P U 28C P U 29C P U 30C P U 31C P U 32C P U 33C P U 34C P U 35C P U 39C P U 40D M A 4CC430F5133E üüüüüüüüüüüüüüüüüüüüCC430F5135E üüüüüüüüüüüüüüüüüüüüCC430F5137E üüüüüüüüüüüüüüüüüüüüCC430F6125E üüüüüüüüüüüüüüüüüüüüCC430F6126E üüüüüüüüüüüüüüüüüüüüCC430F6127E üüüüüüüüüüüüüüüüüüüüCC430F6135E üüüüüüüüüüüüüüüüüüüüCC430F6137EüüüüüüüüüüüüüüüüüüüüDevices R e v :D M A 7D M A 8E E M 8E E M 9E E M 11E E M 13E E M 14E E M 16E E M 17F L A S H 29F L A S H 31J T A G 20J T A G 21L C D B 1L C D B 3L C D B 4M P Y 1P M M 8P M M 9P M M 10CC430F5133E üüüüüüüüüüüüüüüüüCC430F5135E üüüüüüüüüüüüüüüüüCC430F5137E üüüüüüüüüüüüüüüüüCC430F6125E üüüüüüüüüüüüüüüüüüüüCC430F6126E üüüüüüüüüüüüüüüüüüüüCC430F6127E üüüüüüüüüüüüüüüüüüüüCC430F6135E üüüüüüüüüüüüüüüüüüüüCC430F6137EüüüüüüüüüüüüüüüüüüüüDevices R e v :P M M 11P M M 12P O R T 15R F 1A 1R F 1A 2R F 1A 3R F 1A 5R F 1A 6R T C 4T A B 23U C S 6U C S 7U C S 9U S C I 26W D G 4CC430F5133E üüüüüüüüüüüüüüüCC430F5135E üüüüüüüüüüüüüüüCC430F5137E üüüüüüüüüüüüüüüCC430F6125E üüüüüüüüüüüüüüüCC430F6126E üüüüüüüüüüüüüüüCC430F6127E üüüüüüüüüüüüüüüCC430F6135E üüüüüüüüüüüüüüüCC430F6137EüüüüüüüüüüüüüüüCurrent Version See Appendix A for prior revisions.üThe checkmark means that the issue is present in that revision Package Markings 2Package MarkingsRGC64QFN(RGC),64pinRGZ48QFN(RGZ),48PinDetailed Bug Description 3Detailed Bug DescriptionADC24ADC12ModuleFunction Unexpected ADC12current draw when ADC12ENC=1Description When set,the ADC12ENC bit issues a clock request to the selected source clock,even before the conversion trigger.This causes some extra current consumption,dependingon the selected clock.Workaround NoneADC25ADC12ModuleFunction Write to ADC12CTL0triggers ADC12when CONSEQ=00Description If ADC conversions are triggered by the Timer_B module and the ADC12is insingle-channel single-conversion mode(CONSEQ=00),ADC sampling is enabled bywrite access to any bit(s)in the ADC12CTL0register.This is contrary to the expectedbehavior that only the ADC12enable conversion bit(ADC12ENC)triggers a new ADC12sample.Workaround When operating the ADC12in CONSEQ=00and a Timer_B output is selected as the sample and hold source,temporarily clear the ADC12ENC bit before writing to other bitsin the ADC12CTL0register.The following capture trigger can then be re-enabled bysetting ADC12ENC=1.COMP4Comparator_B ModuleFunction CBEX and CBOUTPOL bits do not invert comparator I/ODescription Setting the exchange bit,CBEX,does not interchange the comparator inputs.Similarly setting the output polarity bit,CBOUTPOL,does not invert the output of the comparator.Workaround To obtain an inverted output from the comparator,invert the input signals to thecomparator using the channel input selector bits,CBIPSEL_x and CBIMSEL_x.Makesure to use a MOV instruction so that the inputs are inverted simultaneously.CPU18CPU ModuleFunction LPM instruction can corrupt PC/SR registersDescription The PC and SR registers have the potential to be corrupted when:•An instruction using register,absolute,indexed,indirect,indirect auto-increment,orsymbolic mode is used to set the LPM bits(for example,BIS&xyh,SR).and•This instruction is followed by a CALL or CALLA instruction.Upon servicing an interrupt service routine,the program counter(PC)is pushed twiceonto the stack instead of the correct operation where the PC,then the SR registers arepushed onto the stack.This corrupts the SR and possibly the PC on RETI from the ISR.Workaround Insert a NOP or__no_operation()intrinsic function between the instruction to enterlow-power mode and the CALL or CALLA instruction. Detailed Bug Description CPU20CPU ModuleFunction An unexpected Vacant Memory Access Flag(VMAIFG)can be triggered due to the CPU autoincrement of the MAB+2outside the range of a valid memory block.Description The VMAIFG is triggered if a PC-modifying instruction(for example,ret,push,call,pop, jmp,or br)is fetched from the last address of a section of memory(for example,FLASH,RAM)that is not contiguous to a higher valid section on the memory map.Workaround If code is affected,edit the linker command file to make the last four bytes of affected memory sections unavailable.CPU24CPU ModuleFunction Program counter corruption following entry into low-power modeDescription The program counter is corrupted when an interrupt event occurs in the time between (and including)one cycle before and one cycle after the CPUOFF bit is set in the statusregister.This failure occurs when the BIS instruction is followed by a CALL or CALLAinstruction using the following addressing modes:BIS&,SRCALLA indir,indir autoinc,regBIS INDEX,SRCALLA indir,indir autoinc,regBIS reg,SRCALLA reg,indir,indir autoincNOTE:Due to the instruction emulation,the EINT instruction,as well as the__enable_interrupts()and possibly the__bis_SR_register()intrinsicfunctions are affected.Workaround Insert a NOP instruction or__no_operation()intrinsic function call between the BIS and CALL or CALLA instructions.CPU25CPU ModuleFunction DMA transfer does not execute during low-power modeDescription If the following instruction sequence is used([]denotes an addressing mode)to enter a low-power mode,and the DMARMWDIS bit is set,then DMA transfers are blocked forthe duration of the low-power mode.BIS[register|index|absolute|symbolic],SRCALLA[register]Workaround•Insert a NOP instruction or__no_operation()intrinsic function call between the BISand CALLA instructionsor•Temporarily disable the DMARMWDIS bit when entering low-power mode.Detailed Bug Description CPU26CPU ModuleFunction CALL SP does not behave as expectedDescription When the intention is to execute code from the stack,a CALL SP instruction skips the first piece of data(instruction)on the stack.The second piece of data at SP+2is usedas the first executable instruction.Workaround Write the op code for a NOP as the first instruction on the stack.Begin the intendedsubroutine at address SP+2.CPU27CPU ModuleFunction Program Counter(PC)is corrupted during the context save of a nested interrupt Description When a low-power mode is entered within an interrupt service routine that has enabled nested interrupts(by setting the GIE bit),and the instruction that sets the low-powermode is directly followed by a RETI instruction,an incorrect value of PC+2is pushed tothe stack during the context save.Hence,the RETI instruction is not executed on returnfrom the nested interrupt,and the PC becomes corrupted.Workaround Insert a NOP or__no_operation()intrinsic function between the instruction that sets the lower power mode and the RETI instruction.CPU28CPU ModuleFunction PC is corrupted when using certain extended addressing mode combinations Description An extended memory instruction that modifies the program counter executes incorrectly when preceded by an extended memory write-back instruction under the followingconditions:First instruction:2-operand instruction,extended mode using(register,index),(register,absolute),or(register,symbolic)addressing modesSecond instruction:2-operand instruction,extended mode using the(indirect,PC),(indirectauto-increment,PC),or(indexed[with ind0],PC)addressing modesExample BISX.A R6,&AABCDANDX.A@R4+,PCWorkaround•Insert a NOP or a__no_operation()intrinsic function between the two instructions.or•Do not use an extended memory instruction to modify the PC. Detailed Bug Description CPU29CPU ModuleFunction Using a certain instruction sequence to enter low-power mode(s)affects the instruction width of the first instruction in an NMI ISRDescription If there is a pending NMI request when the CPU enters a low-power mode(LPMx)using an instruction of Indexed source addressing mode,and that instruction is followed by a20-bit wide instruction of Register source and Destination addressing modes,the firstinstruction of the ISR is executed as a20-bit wide instruction.Example main:...MOV.W[indexed],SR;Enter LPMxMOVX.A[register],[register];20-bit wide instruction...ISR_start:MOV.B[indexed],[register];ERROR-Executed as a20-bit instruction!Note:[]indicates addressing modeWorkaround•Insert a NOP or a__no_operation()intrinsic function following the instruction thatenters the LPMx using indexed addressing mode.or•Use a NOP or a__no_operation()intrinsic function as first instruction in the ISR.or•Do not use the indexed mode to enter LPMx.CPU30CPUX ModuleFunction ADDA,SUBA,CMPA[immediate],PC behave as if immediate value were offset by-2Description The extended address instructions ADDA,SUBA,CMPA in immediate addressing mode are represented by4-bytes of opcode.In cases where the program counter(PC)is usedas the destination register only2bytes of the current instruction's4-byte opcode areaccounted for in the PC value.The resulting operation executes as if the immediatevalue were offset by a value of-2.NOTE:The MOV instruction is not affected.Workaround•Modify immediate value in software to account for the offset of2.or•Use extended20-bit instructions(addx.a,subx.a,cmpx.a)instead.CPU31CPUX ModuleFunction SP corruptionDescription When the instruction PUSHX.A is executed using the indirect auto-increment mode with the stack pointer(SP)as the source register[PUSHX.A@SP+],the SP is consequentlycorrupted.Instead of decrementing the value of the SP by four,the value of the SP isreplaced with the data pointed to by the SP previous to the PUSHX.A instructionexecution.Workaround None.The compiler does not generate a PUSHX.A instruction that involves the SP.Detailed Bug Description CPU32CPUX ModuleFunction CALLA PC executes incorrectlyDescription When the instruction CALLA PC is executed,the program counter(PC)that is pushed onto the stack during the context save is incorrectly offset by a value of-2.Workaround None.The compiler does not generate a CALLA PC instruction.CPU33CPUX ModuleFunction CALLA[indexed]may corrupt the program counterDescription When the Stack Pointer(SP)is used as the destination register in the CALLAindex(Rdst)instruction and is preceded by a PUSH or PUSHX instruction in any of thefollowing addressing modes:Absolute,Symbolic,Indexed,Indirect register,or Indirectauto-increment,the"index"of the CALLA instruction is not sign extended to20-bits andis always treated as a positive value.This causes the Program Counter to be set to awrong address location when the index of the CALLA instruction represents a negativeoffset.NOTE:This erratum applies only when the instruction sequence is:PUSH orPUSHX followed by CALLA index(SP).This erratum does not apply if the PUSH or PUSHX instruction is used inthe Register or Immediate addressing mode.This erratum applies only when SP is used as the destination register inthe CALLA index(Rdst)instruction.Workaround Place a NOP instruction in between the PUSH or PUSHX and the CALLA index(SP)instructions.NOTE:This bug has no compiler impact as the compiler does not generate aCALLA instruction that uses indexed addressing mode with the SP.CPU34CPU ModuleFunction CPU may be halted if a conditional jump is followed by a rotate PC instruction Description If a conditional jump instruction(JZ,JNZ,JC,JNC,JN,JGE,JL)is followed by anAddress Rotate instruction on the PC(RRCM,RRAM,RLAM,RRUM)and the jump isnot performed,the CPU is halted.Workaround Insert a NOP between the conditional jump and the rotate PC instructions. Detailed Bug Description CPU35CPU ModuleFunction Instruction BIT.B@Rx,PC uses the wrong PC valueDescription The BIT(.B/.W)instruction in indirect register addressing mode is represented by2bytes of opcode.And if Program Counter(PC)is used as the destination register,the2opcode bytes of the current BIT instruction are not accounted for.The resulting operationexecutes the instruction using the wrong PC value,and this affects the results in theStatus Register(SR).Workaround NoneNOTE:The compiler does not generate a BIT instruction that uses the PC as anoperand.CPU39CPU ModuleFunction PC is corrupted when single-stepping through an instruction that clears the GIE bit Description Single-stepping over an instruction that clears the General Interrupt Enable bit(e.g.,DINT or BIC#GIE,SR)when the GIE bit was previously set may corrupt the PC.Forexample,the DINT or BIC#GIE,SR is a2-byte instruction.Single stepping through thisinstruction increments the PC by a value of4instead of2,thus corrupting the next PCvalue.Workaround Insert a NOP or__no_operation()intrinsic immediately after the line of code that clears the GIE bit.NOTE:This erratum applies to debug mode only.CPU40CPU ModuleFunction PC is corrupted when executing jump/conditional jump instruction that is followed byinstruction with PC as destination register or a data sectionDescription If the value at the memory location immediately following a jump/conditional jumpinstruction is0X40h or0X50h(where X=don't care),which could either be aninstruction opcode(for instructions like RRCM,RRAM,RLAM,RRUM)with PC asdestination register or a data section(const data in flash memory or data variable inRAM),then the PC value gets auto-incremented by2after the jump instruction isexecuted;thus branching to a wrong address location in code and leading to wrongprogram execution.For example,a conditional jump instruction followed by data section(0140h).@0x8012Loop DEC.W R6@0x8014DEC.W R7@0x8016JNZ Loop@0x8018Value1DW0140hWorkaround In assembly,insert a NOP between the jump/conditional jump instruction and program code with instruction that contains PC as destination register or the data section.Detailed Bug Description DMA4DMA ModuleFunction Corrupted write access to20-bit DMA registersDescription When a20-bit wide write to a DMA address register(DMAxSA or DMAxDA)isinterrupted by a DMA transfer,the register contents may be unpredictable.Workaround•Design the application to ensure that no DMA access interrupts20-bit wide accessesto the DMA address registers.or•When accessing the DMA address registers,enable the Read Modify Write disablebit(DMARMWDIS=1),or temporarily disable all active DMA channels(DMAEN=0).or•Use word access for accessing the DMA address registers.Note that this limits thevalues that can be written to the address registers to16-bit values(lower64K offlash).DMA7DMA ModuleFunction DMA interrupt lostDescription If a DMA request is received during the time when the read address of a read modifywrite instruction is on the Memory Address Bus(MAB),application interrupts could belost.Workaround Set the DMARMWDIS bit when using the DMA.DMA8DMA ModuleFunction DMA can corrupt values on write-access to program stackDescription If the DMA controller makes a write access to the stack while executing one of thefollowing instructions,the data that is written may be corrupted.CALLA[REG|IDX|SYM|ABS|IND|INA|IMM]PUSHX.A[IDX|SYM|ABS|IND|IMM|INA]PUSHX.A[REG]PUSHM.A[REG]POPM.A[REG]Note:[]denotes an addressing modeWorkaround Do not declare function-scope variables.Declare all variables that are intended to bemodified by the DMA as global-or file-scope such that they are allocated in the datasection of RAM and not on the program stack.EEM8Enhanced Emulation ModuleFunction Debugger stops responding when using the DMADescription In repeated transfer mode,the DMA automatically reloads the size counter(DMAxSZ) once a transfer is complete and immediately continues to execute the next transferunless the DMA Enable bit(DMAEN)has been previously cleared.In burst-block transfermode,DMA block transfers are interleaved with CPU activity80/20%–of ten CPUcycles,eight are allocated to a block transfer and two are allocated for the CPU.Because the JTAG system must wait for the CPU bus to be clear to halt the device,itcan only do so when two conditions are met:•Three clock cycles after any DMA transfer,the DMA is no longer requesting the bus.and•The CPU is not requesting the bus.Therefore,if the DMA is configured to operate in the repeat burst-block transfer mode,and a breakpoint is set between the line of code that triggers the DMA transfers and theline that clears the DMAEN bit,the DMA always requests the bus and the JTAG systemnever gains control of the device.Workaround When operating the DMA in repeat burst-block transfer mode,set breakpoint(s)onlywhen the DMA transfers are not active(before the start or after the end of the DMAtransfers).EEM9Enhanced Emulation ModuleFunction Combined breakpoint triggers may be missedDescription When debugging,if combined breakpoint triggers are used with certain combinations of instructions(examples below)the trigger may be missed.Examples1)PUSH[IDX|SYM|ABS|IND|INA]MOV[REG],[REG]2)BIS[REG],SRCALLA[REG]3)ADD[IMM],[ABS]||ADD[REG],[IDX]||ADD[REG],[SYM]||ADD[IND],[SYM]ADD[IND],[REG]4)PUSHX.A[REG]with rep_cnt=4SXTX.W[ABS]PUSHX[INA]Note:[]denotes an addressing modeWorkaround NoneEEM11Enhanced Emulation ModuleFunction Condition register write trigger fails while executing rotate instructionsDescription When using breakpoints or single stepping in the presence of multiplebackground-interrupts,the debugger may not halt at the breakpoint location and insteadhalts at the first line of any interrupt service routine.Workaround NoneNOTE:This erratum applies to debug mode only.EEM13Enhanced Emulation ModuleFunction Halting the debugger does not return correct PC value when in LPMDescription When debugging,if the device is in any low-power mode and the debugger is halted,the program counter update by the debugger is corrupted.The debugger is unable to halt atthe correct location.Workaround NoneNOTE:This erratum applies to debug mode only.EEM14Enhanced Emulation ModuleFunction Single-step or breakpoint on module register with WAIT capability may not work Description In debug mode,the CPU clock is driven independently from the wait inputs of devicemodules(i.e.,MULT,USB,RF1A,CRC).As a result,an EEM halt on an access to themodule data registers(breakpoint or single-step)may show incorrect results due toincomplete execution.Workaround Do not single-step through a data register access that holds the CPU to provide a valid result.Place breakpoints after the affected register is accessed and sufficient clockcycles have been provided.NOTE:This erratum applies to debug mode only.EEM16Enhanced Emulation ModuleFunction The state storage display does not work reliably when used on instructions with CPUWait cycles.Description When executing instructions that require wait states;the state storage window updates incorrectly.For example a flash erase instruction causes the CPU to be held until theerase is completed i.e.the flash puts the CPU in a wait state.During this time if the statestorage window is enabled it may incorrectly display any previously executed instructionmultiple times.NOTE:This erratum affects debug mode only.Workaround Do not enable the state storage display when executing instructions that require waitstates.Instead set a breakpoint after the instruction is completed to view the statestorage display.EEM17Enhanced Emulation ModuleFunction Wrong Breakpoint halt after executing Flash Erase/Write instructionsDescription Hardware breakpoints or Conditional Address triggered breakpoints on instructions that follow Flash Erase/Write instructions,stops the debugger at the actual Flash Erase/Writeinstruction even though the flash erase/write operation has already been executed.Thehardware/conditional address triggered breakpoints that are placed on either the nexttwo single opcode instructions OR the next double opcode instruction that follows theFlash Erase/Write instruction are affected by this erratum.NOTE:This erratum affects debug mode only.Workaround e other conditional/advanced triggered breakpoints to halt the debugger right after Flash erase/write instructions.FLASH29Flash ModuleFunction Read disturb due to emergency exit from write/erase Flash operationDescription When a Flash write or erase is abruptly terminated,any further reliable reads from Flash are not ensured.The abrupt termination can occur as a result of the Emergency Exit bit(EMEX in FCTL3)being set.This forces a write or an erase operation to be terminatedbefore normal completion.Workaround After setting EMEX=1,wait for at least100µs after a bank or mass erase and at least 6µs after a segment erase before Flash is accessed again.FLASH31Flash ModuleFunction Interrupts not disabled during flash operationDescription When a flash operation is in progress,interrupts are not automatically disabled.TheCPU will always attempt to service the interrupt request,whether or not the flash is busy.Workaround Disable interrupts using the GIE bit before erasing flash in another bank of memory.Note that all interrupts during the period of time will be lost when GIE=0.RSTTESTJTAG20SYS Module FunctionBSL does not exit to application code DescriptionThe methods used to exit the BSL per the MSP430Memory Programming User's Guide (SLAU265)are invalid.Workaround Toexit the BSL one of the following methods must be used.•A power cycle •or •Toggle the TEST pin twice when RST is high,and then pull RST low.NOTE:This sequence is not subject to timing constraints and the appropriatelevel transitions are sufficient to trigger an exit from BSL mode.JTAG21JTAG Module Function"Attach to Running Target"resets device DescriptionThe "attach to running target"feature in IAR occasionally resets the device before getting it under JTAG control.Workaround Use alternative methods (for example,outputting device status/variables via port pins orUART)to debug unattached running target.LCDB1LCD_B ModuleFunction VLCDEXT bit not working properlyDescription When the VLCDEXT bit is set an external voltage applied to the LCDCAP/R33pinshould serve as the LCD voltage.This works as expected when the V2to V4voltagesare generated externally (LCDEXTBIAS =1)and external resistors are connected on theR03to R33resistor ladder.If internal V2to V4bias voltage generation is selected(LCDEXTBIAS =0),applying an external LCD voltage on LCDCAP VLCDEXT has noeffect.WorkaroundThe expected behavior for the VLCDEXT bit can be achieved by setting the VLCDx bitsto a non-zero value and leaving the charge pump disabled (LCDCPEN =0).The VLCDxbits are don't care when the charge pump is disabled so this does not result in anyadditional or unexpected current consumption.LCDB3LCD_B ModuleFunction LCDFRMIFG set erroneously when LCDON changed from1to0Description The LCD_B frame interrupt flag(LCDFRMIFG)can be set erroneously when theinterrupt is enabled((LCDFRMIE=1)and the LCD_B module is switched off(LCDONchanged from1to0).Workaround Disable the frame interrupt before switching off the LCD_B module.LCDB4LCD_B ModuleFunction Write access to LCDBIV does not reset LCD IFGsDescription A write access to the LCDBIV register does not automatically reset all pending interrupt flags.Workaround Clear all interrupt flags in software by writing0to the lowest nibble of LCDBCTL1,where the flags are stored.MPY1Hardware Multiplier(MPY)ModuleFunction Save and Restore feature on MPY32not functionalDescription The MPY32module uses the Save and Restore method which involves saving themultiplier state by pushing the MPY configuration/operand values to the stack beforeusing the multiplier inside an Interrupt Service Routine(ISR)and then restoring the stateby popping the configuration/operand values back to the MPY registers at the end of theISR.However due to the erratum the Save and Restore operation fails causing the writeoperation to the OP2H register right after the restore operation to be ignored as it is notpreceded by a write to OP2L register resulting in an invalid multiply operation. Workaround None.Disable interrupts when writing to OP2L and OP2H registers.NOTE:When using the C-compiler,the interrupts are automatically disabledwhile using the MPY32.。
德州仪器推出全新CC430技术平台,推动RF设计向前发展
收发 器的优 势在于 其先进 的高选择 性 与高阻塞性能, 确保 即使在噪声环境下
此 次巡展受 到了用户 的热烈欢迎 , 每到一处, 都有数百位 各行 业听众 到会 听取报 告,专家 团队分别就传动 ( 变频 和伺服)、控制 、安全 产品、传 感器 等
做 了专 题 演 讲 , 点介 绍 了包 括 中小 型 重
C 40技术平 台,为基于微处理器 C3
( U)的应用提供低功耗单 芯片射频 MC (F R )解决方案 ,该产品有助于推动无 线网络技 术在 消费类 电子产 品市场及 工业 市场 的大规模应用 。 首批 C 4 0器 件均 为具有 高集成 C3 度 的单片 电路 ,与双 芯片解 决方案相 比,其 封装 尺寸 与 P B 空 间均 缩 小 C 5 %。 0 这种 高集 成度 与小型化 尺寸优势 可使用户受益非浅 , 例如 , 随时将病 可 人 或医疗 设备信 息发送 至中心位 置 的 智能 医疗跟踪系统 , 可实现手表 、 步程 计 、胸 带式 心率 监控 器 以及 基 于 P C
德州仪器表示,公司准备在 20 09
年第 一季 度 开始 限量供 应 C 4 0样 C3
片, 大量样片供应 与更 多器件 的推 出则
技 术和提 高能源 使用效率 等方 面。创 新、 绿色 能源技术有助于解决一系列 的
环 境 问题 , 高 能源 效 率 则 是 简 单 易 行 提
的改善环境 问题的具体举措 。
德 州 仪 器 1 月 宣 布 推 出 全 新 1 仅为 10 A MH 。 6 ̄ / z
会联合举 办, 目的在于交流 绿色 能源领
域 内的成 功经验 , 索合 作,了解 并克 探 服存在 的障碍 ,共 同应对 全球气 候变 化,创造 并共 享利 益。20 0 8年 中美绿
CC430的真空开关真空度监测系统设计

【 4 J 何 立 民. 嵌入 式 系统 支柱 学科 的 交叉 与 融合 U J . 单 片机 与嵌
入 式 系统 应 用, 2 何 立 民. 微 处理 器智 力 内核 使 一切 成 为 可能 电子 产 品世 界, 2 0 0 9 ( 1 )
语言执行速度快 的特 点开发软件程序 ,可保证系统怏速 、准确
3结 论
本 系统 适 用 于测 量真 空 开 关 灭 弧 室 的 真 空度 ,测 量 时 不 需
 ̄C4如
要 拆 卸 真 空 管 , 自动 测试 并 打 印 ,测 量 结 果 量化 ,可 直 接 与 国
家相 关行业标 准接轨 ,准确 判断被试 品优劣 ,操 作简单 、方
便 、稳 定性 好 、精 度 高 。
【 2 】 何 立 民. 嵌入 式 系统的 定 义与发 展 历 史 【 『 1 . 单 片机 与嵌 入 式
系统 应 用, 2 0 0 4 ( 1 )
【 3 】 何 立 民. 从嵌 入 式 系统 看现 代 计 算机 产 业革命 Ⅲ. 单 片机 与
图5 CC 4 3 O 的 工作 流程
嵌 入 式 系统应 用 , 2 0 0 8 ( 1 )
实现了真空灭弧室的免拆卸测量 ,直接显示真空度值 ,使
图4 数 据采 集 系统 框 图
2 系统软 件设 计
真 空 断 路 器 用 户 详细 掌 握 灭 弧 室 的 真 空状 态 ,为 有 计 划 地 更换 灭 弧 室 提 供 了 可 靠 的依 据 ,为 电 网 的 安 全 运 行 提 供 了 有 力 保 障 ,克 服 了 工频 耐压 法 仅 能 判 断 灭 弧 室 是 否报 废 的缺 陷 。 本仪
的 人 事 管 理 制 度 ,建 立现 代化 的 员工 聘 用 机 制 和 激励 机 制 ,以
CCS的安装及使用教程
CCS的安装及使⽤教程⽬录第⼆章软件的安装与应⽤ (1)2.1 CCSv5.1的安装 (1)2.2 利⽤CCSv5.1导⼊已有⼯程 (4)2.3 利⽤CCSv5.1新建⼯程 (6)2.4 利⽤CCSv5.1调试⼯程 (9)2.5 CCSv5.1资源管理器介绍及应⽤ (16)第⼆章软件的安装与应⽤CCS(Code Composer Studio)是TI公司研发的⼀款具有环境配置、源⽂件编辑、程序调试、跟踪和分析等功能的集成开发环境,能够帮助⽤户在⼀个软件环境下完成编辑、编译、链接、调试和数据分析等⼯作。
CCSv5.1为CCS软件的最新版本,功能更强⼤、性能更稳定、可⽤性更⾼,是MSP430软件开发的理想⼯具。
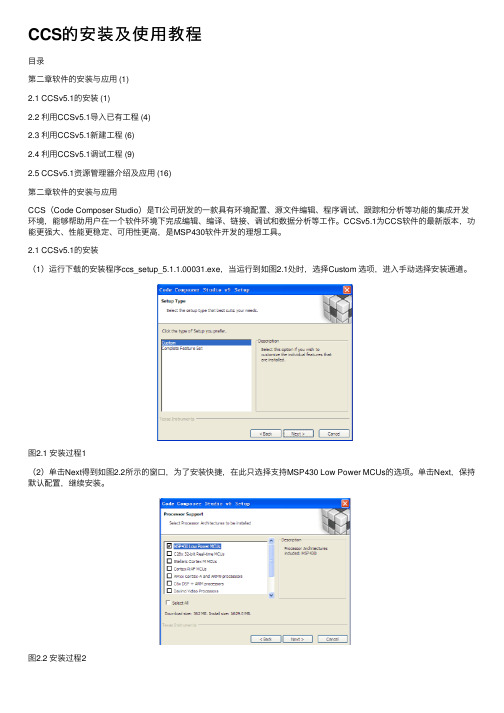
2.1 CCSv5.1的安装(1)运⾏下载的安装程序ccs_setup_5.1.1.00031.exe,当运⾏到如图2.1处时,选择Custom 选项,进⼊⼿动选择安装通道。
图2.1 安装过程1(2)单击Next得到如图2.2所⽰的窗⼝,为了安装快捷,在此只选择⽀持MSP430 Low Power MCUs的选项。
单击Next,保持默认配置,继续安装。
图2.2 安装过程2图2.3 软件安装中图2.4 软件安装完成(3)单击Finish,将运⾏CCS,弹出如图2.5所⽰窗⼝,打开“我的电脑”,在某⼀磁盘下,创建以下⽂件夹路径:-\MSP-EXP430F5529\Workspace,单击Browse,将⼯作区间链接到所建⽂件夹,不勾选"Use this as the default and do not ask again"。
图2.5 Workspace选择窗⼝(4)单击OK,第⼀次运⾏CCS需进⾏软件许可的选择,如图2.6所⽰。
在此,选择CODE SIZE LIMITED(MSP430)选项,在该选项下,对于MSP430,CCS免费开放16KB的程序空间;若您有软件许可,可以参考以下链接进⾏软件许可的认证:/doc/4cbc8458312b3169a451a477.html/index.php/GSG:CCSv5_Running_for_the_first_time,单击Finish即可进⼊CCSv5.1 软件开发集成环境,如图2.7所⽰。
TI低功耗射频芯片CC430f51xf61xf62x中文数据手册

TI德州仪器无线链接产品数据手册CC430F613x CC430F612x CC430F513x声明:此手册由信驰达科技进行翻译整理,旨在更方便快捷的为您进行开发和交流提供帮助。
译文难免会出现错误及误差,如对此有建议可通过邮件方式联系我们,非常感谢您的反馈。
凡译文手册注明“”的作品,均为信驰达(RF-star®)公司合法拥有版权或有权使用的作品,未经本公司授权不得转载、摘编或利用其它方式用于商业用途。
已经本公司授权使用作品的,应在授权范围内使用,并注明“信驰达科技提供”。
违反上述声明者,本公司将拥有最终解释权。
信驰达简介信驰达科技(RF-star)是一家集合方案设计功能和核心器件供应的专业本地电子元器件分销商,专注低功耗射频LPRF和低功耗MCU领域,公司成立于2010年,作为中国区唯一具有美国TI公司授予的LPRF Product Reseller和Third Party双重资质的公司,一直引领着LPRF技术在国内的推广和应用,是国内唯一一家可提供LPRF软硬件产品、技术支持、解决方案和核心元器件供应一条龙服务的专业化公司;公司在美国新泽西州、中国深圳、上海、北京、天津、无锡、长沙、成都、重庆设有研发中心和办事处,拥有资深的技术研发团队和销售团队以及SMT生产工厂。
无线射频器件用于低于1GHz和2.4GHz频段、ANT、蓝牙(Bluetooth)、低功耗蓝牙、射频识别(RFID)、PurePath无线音频、ZigBee、IEEE802.15.4、Zigbee RF4CE、6LoWPAN、Wi-Fi的射频集成电路(RF IC)和专有协议。
产品市场应用:ZigBee无线传感网络,各种数据采集及遥测监控(含数据,语音,图像等),可应用于安防、医疗、能源、水力、电力、交通监控、防盗,无线自动抄表;仪器仪表远程数据遥测、工业无线遥控;消防安全自动报警、煤矿安全监控及人员定位;汽车防盗、胎压检测,四轮定位;无线键盘、鼠标、打印机、游戏杆、遥控玩具、机器人等广泛的领域。
“C”字头代码(SMD Marking Code)

“C”字头代码(SMD Marking Code)代码规格型号生产商封装备注CA1 SMV1141-001 SOT 23 SINGLECB3 SMV1200-999 SOT 23 CATHODE(TWIN) CC3 SMV1232-004 SOT 23 CATHODE(TWIN) CTS SMV1202-89 SOT 23 SINGLECU1 SMV1204-79 SOT 23 SINGLEC BB565 Sie SCD80 uhf varicap 2-20pFC white BAT165 Sie - 40V 750mA sw Schottky C KV1832E Tok URD uhf varicap 4-17pfC0 HSMS-2820 HP SOT23 HP2835 schottkyC0 HSMS-282B HP SOT323 HP2835 schottkyC1 HSMS-2821 HP SOT23 HP2835 schottkyC1 BCW29 Phi SOT23 BC178AC1p BCW29 Phi SOT23 BC178AC1t BCW29 Phi SOT23 BC178AC1 BFQ51C Phi SOT173 pnp BFR90A complement C2 BCW30 Phi SOT23 BC178BC2p BCW30 Phi SOT23 BC178BC2t BCW30 Phi SOT23 BC178BC2 BFQ32C Phi SOT173 pnp 4.5GHz 15V 100mAC2 HSMS-2822 HP SOT23 dual HP2835 schottkyC2 HSMS-282C HP SOT323 dual HP2835 schottkyC2 SST112 Tem SOT23 J112 analog sw n-ch jfetC2A ZDC833A Zet SOT23 dual cc 28V varicap 15pF @2VC3 HSMS-2823 HP SOT23 dual HP2835 schottky C3 BFQ23C Phi SOT173 pnp complement BFP91AC3 SMBT4126 Sie - 2N4126C3 SST113 Tem SOT23 J113 analog sw jfetC4 BCW29R Phi SOT23R BC178AC4 HSMS-2824 HP SOT23 dual HP2835 schottkyC5 MMBA811C5 Mot - 2N5086 pnp hfe 135-270 C5 BCW30R Phi SOT23R BC178BC5 HSMS-2825 HP SOT143 dual HP2835 schottkyC5A ZDC834A Zet SOT23 dual cc 28V varicap 47pF @2VC6 MMBA811C6 Mot - 2N5086 pnp hfe 200-400 C7 MMBA811C7 Mot - 2N5086 pnp hfe 300-600 C7 HSMS-2827 HP SOT143 HP2835 ring quadC8 HSMS-2828 HP SOT143 HP2835 bridge quadC8 BCF30 SGS SOT23 BC559BC8 MMBA811C8 Mot - 2N5086 pnp hfe 450-900 C11 SST111 Sil SOT23 J111 n-ch fetC12 SST112 Sil SOT23 J112 n-ch fetC13 SST113 Sil SOT23 J113 n-ch fetC38 SST5638 Sil SOT23 2N5638C39 SST5639 Sil SOT23 2N5639C40 SST5640 Sil SOT23 2N5640C41 SST4091 Sil SOT23 2N4091C42 SST4092 Sil SOT23 2N4092C43 SST4093 Sil SOT23 2N4093C56 SST4856 Sil SOT23 2N4856C57 SST4857 Sil SOT23 2N4857C58 SST4858 Sil SOT23 2N4858C59 SST4859 Sil SOT23 2N4859C60 SST4860 Sil SOT23 2N4860C61 SST4861 Sil SOT23 2N4861C91 SST4391 Sil SOT23 2N4391C92 SST4392 Sil SOT23 2N4392C93 SST4393 Sil SOT23 2N4393CA BCW61AR Phi SOT23R BCY78-vii CA BCP68 Mot SOT223 20V 1A npnCA ZMV829B Zet SOD323 varicap hyperab 28V 8.2pF@2VCB BCX68-10 Sie SOT89 npn AF 20V 2A hfe 100 CB BCW61BR Phi SOT23R BCY78-viiiCB ZMV830B Zet SOD323 varicap hyperabrupt 28V 10pF@2VCC BCW61CR Phi SOT23R BCY78-ixCC BCX68-16 Sie SOT89 npn AF 20V 2A hfe 160CC ZMV831B Zet SOD323 varicap hyperabrupt 28V 15pF@2VCC ZMDC831B Zet SOT323 dual cc ZMV831B (above) CD BCW61DR Phi SOT23R BCY78-xCD BCX68-25 Sie SOT89 npn AF 20V 2A hfe 250CD ZMV832B Zet SOD323 varicap hyperabrupt 28V 22pF@2VCD ZMDC832B Zet SOT323 dual cc ZMV832B (above) CDs BSS81B Sie SOT23 npn sw 35V 0.8ACE BCP69 Mot SOT223 20V 1A pnpCE ZMV833B Zet SOD323 varicap hyperabrupt 28V 33pF@2VCEs BSS79B Sie SOT23 npn 40V 0.8A hfe 40-120 CF BSS79C Sie SOT23 npn 40V 0.8A hfe 100 minCF BCX69-10 Sie SOT89 pnp AF 20V 2A hfe 100CF ZMV834B Zet SOD323 varicap hyperabrupt 28V 47pF@2VCG BCX71GR Phi SOT23R BCY79-viiCG BCX69-16 Sie SOT89 pnp AF 20V 2A hfe 160CG ZMV835B Zet SOD323 varicap hyperabrupt 28V 68pF@2VCGs BSS81C Sie SOT23 npn sw 35V 1ACHs BSS80B Sie SOT23 pnp 40V 0.8A hfe 40-120 CH BSS82BL Mot SOT23 pnp 60VCH BCX69-25 Sie SOT89 pnp AF 20V 2A hfe 250 CJs BSS80C Sie SOT23 pnp 40V 0.8A hfe 100 min CK BCX71JR Phi SOT23R BCY79-viiiCLs BSS82B Sie SOT23 pnp 60V 0.8A hfe 40-120 CMs BSS82C Sie SOT23 pnp 60V 0.8A hfe 100 min CQ 2SC2411K Roh - npn darlingtonCQ MSD710Q Mot SOT346 pnp gp 25V 150mACR MSD701R Mot SOT346 pnp gp 25V 150mA。
CC430RF1A功能实现数据手册

CC430学习笔记CC430是TI在2008年末发布的MSP430家族的一个新的RF Soc系列,CC430集成了MSP430当时最新5系列的核以及低功耗无线收发器CC1101的核,并且集成了5系列丰富的外设等。
CC430不但延续了其前辈超低功耗、高性能的传统,而且集成了业界领先的1GHz以下频段的CC1101RF收发器,是真正的业界最低功耗的单芯片射频(RF)解决方案。
使用CC430平台既可降低系统复杂性、将封装与印刷电路板尺寸缩小50%,又可简化RF设计,从而将包括RF网络、能量采集、工业监控与篡改检测、个人无线网络以及自动抄表基础设施(AMI)等在内的应用推向前所未有的水平。
eZ430- RF5137系列套件号称是全球最小的1G以下无线应用开发系统。
该套件由以下几部分组成:两块CC430F5137目标板,一个支持MSP430 SBW(Spy Bi-Wire)在线仿真器,一个电池适配板。
eZ430与CC430F5137目标板可通过六针(SBW+UART)相连,构成了CC430在线仿真调试平台,并可以通过仿真器的USB转UART应用接口,可轻松实现上位机应用程序管理、控制CC430无线收发工作,可作为无线传感器网络的集中器;同时配合CC430F5137与电池座构成的系统,作为无线传感器网络的采集节点。
先理解几个词语,至少有一些是我以前不懂的:CCA: Clear Channel Assessment;清除信道访问,一般用于判断信道是不是忙。
RSSI: Received Signal Strength Indicator;接受信号强度指示。
FIFO:First Input First Output;先进先出,一般对缓冲区,或者队列数据操作的类型,典型对比,堆栈,先进后出。
WOR:Wake On Radio;电磁波唤醒,一般用于低功耗配置,为了节省电,还没有用过。
PATABLE:Power Amplifier Table;功率放大表,这里是用来设置功率的。
川崎机器人报警代码

川崎机器人报警代码代码错误信息PO100非法的输入数据。
PO101变量太多。
PO102输入数据过大。
PO103非法的PC编号。
PO104非法的机器人编号。
PO105非法程序PO106非法的优先级。
PO107无效的坐标值。
PO108语法错误。
PO109无效语句。
PO110请指明命令的全拼。
PO111当前模式下不能使用该条命令/指令。
PO112不能用D0指令执行。
PO113不是程序指令。
PO114非法表达式。
PO115非法函数。
PO116函数变量非法。
PO117无效变量(或程序)名。
PO118非法的变量型类。
PO119数组下标错误。
PO120括号不成对。
PO121需要的是二进制算子。
PO122非法常数。
PO123非法的原定符。
PO124无效标签。
PO125缺字符。
PO126非法的开关名称。
PO127指定的开关名称需要全拼。
PO128非法格式的分类符。
PO129标签语句重复。
PO130不能定义为数组。
PO131数组的维数大于3。
PO132数组变量已存在。
PO133数组变量不存在。
PO134需要使用数组变量。
PO135需要局部变量。
PO136意外的数组下标。
PO137调用子程序时自变量不匹配。
PO138调用子程序时自变量的类型不匹配。
PO139非法的控制结构。
PO140步:XX错误的END语句。
PO141步:XX多余的END语句。
PO142步:XX不能以END停止D0。
PO143步:XX在CASE后没有VALUE语句。
PO144步:XX前面缺少IF。
PO145步:XX前面缺少CASE.PO146步:XX前面缺少D0。
PO147步:XX未发现XX的END语句。
PO148步:XX控制结构过多。
PO149变量(或程序)名已存在。
PO150不同类型的变量已存在。
PO151复杂的表达式造成内部缓冲区溢出。
PO152未定义的变量(或程序)。
PO153非法的时钟值。
PO154缺少‘=’。
PO155缺少‘)’。
PO156缺少‘]’。
[说明]IAR430头文件中define定义的部分解释
![[说明]IAR430头文件中define定义的部分解释](https://img.taocdn.com/s3/m/a09c1f7959fafab069dc5022aaea998fcc2240c8.png)
IAR 430 头文件中#define定义的部分解释今天在阅读RF_Example_Code_v1.0中头文件cc430x613x.h时发现了几部分的疑问。
首先来看一下cc430x613x.h 中的3个#define的例子:#define DEFC(name, address) __no_init volatile unsigned char name @ address;#define DEFW(name, address) __no_init volatile unsigned short name @ address;#define DEFCW(name, address) __no_init union \{ \struct \{ \volatile unsigned char name##_L; \volatile unsigned char name##_H; \}; \volatile unsigned short name; \} @ address;前面的两个#define的用法是一样的。
首先我可以发现,在宏定义里面都有一个关键字__no_init。
查看了《MSP430 IAR C/EC++ Compiler Reference Guide》内的IAR Language Extension Overview 可以发现,__no_init是IAR扩展语法里面的一个扩展关键字。
作用是声明一个non-volatile类型的内存地址(Support non-valotile memory)。
于是解决了__no_init的问题。
再者对@这个字符存在一定的疑问,于是上网查了查资料。
虽然对于@这个字符的用法还是不是很明确,但是可以明确的是:#define DEFC(name, address) __no_init volatile unsigned char name @ address;#define DEFC(name, address) sfrb name = address;这两种定义是等价的,但是后者是基于汇编嵌入式编程的情况下才成立。
CC430F5137单片机的动力电池管理系统设计

大 , 要 充 放 电 控 制 电路 对 电 池 进 行 保 护 充 放 电 , 免 损 需 以
针对 以上缺 点 , 现采 用基 于 单 片机 C 3F 17为控 制 核  ̄ 0 53 心 的设计 方 案 。C_ 0 5 3 C F 17内部集 成 了 CE l1无 线 电收 发 A3 A l0
1 电池 管 理 系统 运 行原 理
本 系统 安 装 在 电 动 汽 车 中 , 以 实 时 监 视 电 池 的 状 可 况 。 当 电池 汽 车充 电 时 , 统 可 以 将 充 电 数 据通 过无 线 模 系 块传 输 给 充 电 中心 , 自动 进 行 充 放 电 管 理 。这 样 充 电 中 并 心就 可 以实 时 了解充 电 的状 态 , 且 充 电 中 心 不 用将 其 他 而 线路 接 人 汽 车 内 , 少 了搭 建 线 路 的 麻 烦 , 高 了 工 作 效 减 提 率 ; 汽 车 在 正 常 使 用 电池 时 , 当 系统 会 实 时 监 测 电池 的 用 电 情 况 , 剩 余 电量 不 足 时 及 时 通 知 驾 驶 人 员 , 将 警 报 在 并 通 过 无 线 模 块 发 送 给 充 电 中心 , 知 需 要 充 电 。 告 电 池 管 理 系 统 结 构 框 图 如 图 1所 示 。 本 系 统 以 C 3 F 1 7为 控 制核 心 ; 电 池 充 放 电 控 制 电 路 主 要 是 C4 o 5 3 蓄
2 0 第 8期 1 7年
wWW . mes ef c n . 1 n . or ci
学 习 园 地
坏 电 池 ; 电 池 检 测 电 路 主 要 是 检 测 电 池 的充 放 电 电压 、 蓄
CC430时钟
不一定对,但是是自己慢慢看文档和试验出来的,网上没有资料,也没有中文版的PDF,光看这些英文文档不容易啊。
FLL就是锁相环,FLL的时钟默认是XTLF,也就是XT1CLK,XT1CLK就是XT1引脚的外接晶振,当XT1的复用功能打开,也就是PSEL置位,UCSTCL6寄存器没有关闭XT1时钟,看数据手册的原话。
When using XT1 operation in LF mode as the reference source into the FLL (SELREF = {0}), a crystalfault automatically causes the FLL reference source, FLLREFCLK, to be sourced by the REFO也就是说会默认的调整到内部的稳定的低频振荡器REFO,32.768KHz做为FLL的参考时钟源。
所以上电后FLL不调整的就是REFO提供时钟源。
REFO是内部的稳定的低频时钟,标称值为32.768KHz,很稳定。
DCO就是数控可调晶振,英文全称Digitally-Controlled Oscillator,这个搞了好久我才知道是怎么得到的结果啊,下面说一下。
这里FLL是为了稳定DCO的输出,算是一种反馈。
FLL采用的是稳定的REFO,还可以选择XT1,XT2,配置是寄存器UCSCTL3的SELREF的设置,当然这里DCOCLK和DCOCLKDIV的输出还和FLL的其它参数有关,他们分别是FLLD,FLLN,FLLCLK,FLLCLKDIV其中前面两个参数对应UCSCTL2寄存器的FLLD 和FLLN的设置,后面两个参数对应UCSCTL3寄存器的SELREF和FLLREFDIV的配置。
这里利用公式即可算出来。
频率DCOCLK = D*(FLLN+1)*(FLLCLK/n),很容易理解,D=1,2,4,8,16,32(对应FLLD=0,1,2,3,4,5),也即是相当于倍频n=1,2,4,8,12,16(对应FLLREFDIV=0,1,2,3,4,5),也即是相当于分频FLLCLK也就是FLLREFCLK,FLL的参考时钟,可以是REFO,XT1,XT2,也即是提供时钟信号频率DCOCLKDIV= (FLLN+1)*(FLLCLK/n),很容易理解,n=1,2,4,8,12,16(对应FLLREFDIV=0,1,2,3,4,5),也即是相当于分频FLLCLK也就是FLLREFCLK,FLL的参考时钟,可以是REFO,XT1,XT2,也即是提供时钟信号注:FLLD上电后默认是为1的,也就是对应D=2,所以得到DCOCLK是DCOCLKDIV的2倍,我就不截官方的手册图了知道了这些就很容易理解了,比如利尔达官网上的一个例子,分析一下UCSCTL3 |= SELREF_2; // Set DCO FLL reference = REFO,UCSCTL2 = FLLD_1 + 374; // Set DCO Multiplier for 12MHz计算结果计时DCOCLK=2*(374+1)*32.768=24576000,即24MHz,这里FLLREF没有分频,FLLD为1,所以DCOCLKDIV等于12了,前面公式看一下就知道了。
CC430学习笔记----(二)
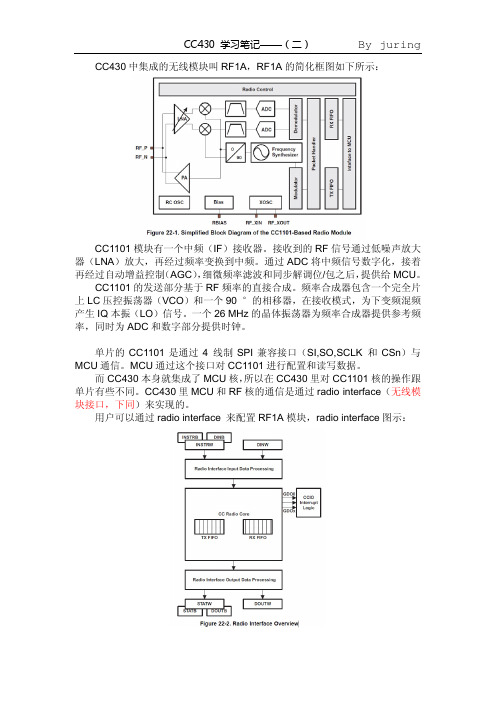
CC430中集成的无线模块叫RF1A,RF1A的简化框图如下所示:CC1101模块有一个中频(IF)接收器。
接收到的RF信号通过低噪声放大器(LNA)放大,再经过频率变换到中频。
通过ADC将中频信号数字化,接着再经过自动增益控制(AGC),细微频率滤波和同步解调位/包之后,提供给MCU。
CC1101的发送部分基于RF频率的直接合成。
频率合成器包含一个完全片上LC压控振荡器(VCO)和一个90 °的相移器,在接收模式,为下变频混频产生IQ本振(LO)信号。
一个26 MHz的晶体振荡器为频率合成器提供参考频率,同时为ADC和数字部分提供时钟。
单片的CC1101是通过4 线制SPI兼容接口(SI,SO,SCLK 和CSn)与MCU通信。
MCU通过这个接口对CC1101进行配置和读写数据。
而CC430本身就集成了MCU核,所以在CC430里对CC1101核的操作跟单片有些不同。
CC430里MCU和RF核的通信是通过radio interface(无线模块接口,下同)来实现的。
用户可以通过radio interface 来配置RF1A模块,radio interface图示:没有了SPI接口,radio interface和radio core(无线模块内核,下同)之间的通信需要通过下图所示的逻辑通道来实现。
每条发送到radio core的指令都会在radio interface上返回一个状态更新,每给radio core发送一个数据字或字节,也都会在radio interface上返回一个字或字节。
根据不同的指令,在两个方向上的一些数据可能是“dummy”或“don't care”数据。
为了避免“哑”写入,模块具有自动读取功能。
我们看到radio interface有8个寄存器:INSTRW/INSTRB、STATW/STATB、DINW/DINB、DOUTW/DOUTB。
一共4组,分别为指令寄存器、状态寄存器和IN/OUT数据寄存器,每一组又分16位字寄存器和8位字节寄存器。
C#错误码(中文)

C# 错误码(中文)附录B错误CS0001 编译器内部错误错误CS0003 内存溢出错误CS0004 提升为错误的警告错误CS0005 编译器选项后应跟正确的参数错误CS0006 找不到动态链接的元数据文件错误CS0007 .Net 环境初始化错误错误CS0008 从文件中读取元数据错误错误CS0009 不能打开元数据文件错误CS0010 名字空间与类型的声明不能同名错误CS0011 引用的类找不到基类错误CS0012 找不到引用类型的定义错误CS0013 向文件中保存元数据时发生未知错误错误CS0014 找不到文件名错误CS0015 类型名太长错误CS0016 无法输出文件错误CS0017 输出文件有多个入口错误CS0019 双目操作符不适用于指定的操作数错误CS0020 除数为0错误CS0021 不能对类型表达式使用索引错误CS0022 错误的多重索引错误CS0023 单目操作符不适用于指定的操作数错误CS0024 无法打开源文件错误CS0025 找不到标准库文件错误CS0026 在静态属性方法域初始化时使用了非法的关键字错误CS0027 当前环境中关键字无效警告4 级CS0028 函数声明带有错误的入口标识错误CS0029 类型之间无法进行隐式转换错误CS0030 类型之间无法进行转换错误CS0031 常数值不能转换为类型值错误CS0032 无法打开渐增编译文件错误CS0033 写渐增编译文件时发生磁盘I/O 错误错误CS0034 双目操作符对指定的操作数存在二义性错误CS0035 单目操作符对指定的操作数存在二义性错误CS0036 输出参数不能使用[in]特征错误CS0037 不能给值类型赋null 值错误CS0038 非静态的类型成员不能被嵌套的类型访问错误CS0040 调试初始化产生错误错误CS0041 保存调试信息错误错误CS0042 创建调试信息文件错误错误CS0043 PDB 文件格式错误将删除文件并重新编译错误CS0050 方法返回类型的访问权限低于方法的访问权限错误CS0051 方法参数类型的访问权限低于方法的访问权限错误CS0052 域类型的访问权限低于域的访问权限错误CS0053 属性类型的访问权限低于属性的访问权限错误CS0054 索引指示器返回类型的访问权限低于索引指示器的访问权限错误CS0055 索引指示器参数类型的访问权限低于索引指示器的访问权限错误CS0056 操作符返回类型的访问权限低于操作符的访问权限错误CS0057 操作符参数类型的访问权限低于操作符的访问权限错误CS0058 代表类型的访问权限低于代表的访问权限错误CS0059 代表类型的访问权限低于代表的访问权限错误CS0060 基类的访问权限低于派生类的访问权限错误CS0061 父接口的访问权限低于子接口的访问权限错误CS0065 事件属性必须同时有两个访问器错误CS0066 事件必须是代表型错误CS0067 事件在声明的类中从未使用过错误CS0068 接口中的事件不能有初始化错误CS0069 接口中的事件不能有访问器错误CS0070 事件不能出现在操作符+= 或–= 左边错误CS0071 事件的显示接口执行体必须按照属性的语法格式错误CS0075 强制转换负数时应使用括号错误CS0076 保存的枚举器名称不能被使用错误CS0077 as 操作符必须同引用类型一起使用错误CS0100 参数名字重复错误CS0101 名字空间中包含了同名的类型错误CS0102 类中已经包含了指示符的定义错误CS0103 名称在类或名字空间中不存在错误CS0104 引用存在二义性错误CS0105 名字空间使用指示符在名字空间中已经出现过错误CS0106 修饰符对当前项目无效错误CS0107 多个访问修饰符警告1 级CS0108 成员覆盖了继承的同名成员应使用new 修饰符警告4 级CS0109 成员未覆盖了继承的同名成员不应使用new 修饰符错误CS0110 常量之间循环定义错误CS0111 具有相同参数类型的方法已被定义过错误CS0112 静态成员方法不能使用override virtual 或abstract 修饰符错误CS0113 重载成员方法不能使用new virtual 或abstract 修饰符警告2 级CS0114 方法覆盖了继承的同名方法如果要重载使用override 修饰符否则使用new 修饰符错误CS0115 找不到合适的方法进行重载错误CS0116 名字空间不能直接包含域或方法等成员错误CS0117 类型中不能包含函数定义错误CS0118 构造函数名称应指代另一构造函数错误CS0119 构造函数名称指代的构造函数在当前环境中无效错误CS0120 非静态的域方法和属性成员要求对象引用错误CS0121 方法之间的调用存在二义性错误CS0122 因保护级别不能访问成员错误CS0123 方法声明与代表的类型不符错误CS0126 需要一个可转换的类型错误CS0127 返回值为void 类型的方法应在表达式后使用return 语句错误CS0128 当前范围内已定义了局部变量错误CS0131 语句的左边应为一个变量属性或索引指示器错误CS0132 静态构造函数不能有参数错误CS0133 表达式中的变量应为常量错误CS0134 在嵌套名字空间中不能使用全权名错误CS0135 声明之间相互冲突错误CS0136 局部变量的名称在当前范围内不能使用该名称已有其它含义错误CS0138 名字空间使用指示符仅对名字空间有效错误CS0139 break 或continue 语句没有跳出的范围错误CS0140 标签重复错误CS0143 未对类定义构造函数错误CS0144 对抽象类或接口不能建立实例错误CS0145 对常量域应赋值错误CS0146 基类定义发生循环错误CS0148 代表没有有效的构造函数错误CS0149 应使用方法名称错误CS0150 应使用常量值错误CS0151 应使用整数类型错误CS0152 switch 语句中已经存在的标签错误CS0153 goto 语句只在switch 语句中有效错误CS0154 因为缺少读访问器属性或索引指示器不能使用错误CS0155 catch 或throw 的类型应该从System.Exception 中继承错误CS0156 throw 语句不能在catch 子句以外使用错误CS0157 无法离开finally 子句错误CS0158 在包含的范围内标签屏蔽了另一个标签错误CS0159 goto 语句中标签不存在错误CS0160 前面的catch 子句已经捕获了所有的意外错误CS0161 方法中不是所有的路径都能返回值错误CS0162 检测到执行不到的代码错误CS0163 控制无法从一个case 语句转入另一个case 语句错误CS0164 标签未被引用错误CS0165 可能使用未被赋值的局部变量错误CS0167 代表缺少调用方法警告3 级CS0168 声明的变量未被使用警告3 级CS0169 保护域成员未被使用错误CS0170 可能使用未被赋值的域错误CS0171 在构造函数结束之前应给域赋值错误CS0172 因类型之间可以相互进行隐式转换无法确定表达式的类型错误CS0173 因类型之间不存在隐式转换无法确定表达式的类型错误CS0174 base 引用需要一个基类错误CS0175 此处不能使用base 关键字错误CS0176 在类的实例中无法访问静态成员应使用类型名错误CS0177 方法结束之前需要给输出参数赋值错误CS0178 数组初始化结构错误错误CS0179 外部方法含有执行体错误CS0180 成员不能同时是外部的和抽象的错误CS0181 未知特征错误CS0182 特征参数必须为常量方法域属性或类警告1 级CS0183 表达式总是提供的类型警告1 级CS0184 表达式总是不提供的类型错误CS0185 类型不是lock 语句中需要的引用类型错误CS0186 当前环境中不能使用null错误CS0187 操作符未对此类型作出定义错误CS0188 在所有域被赋值之前不能使用实例错误CS0190 _arglise 型构造函数仅在使用变量的方法中有效错误CS0191 不能给只读域赋值错误CS0192 只读域不能为ref 或out 型错误CS0193 或操作符只能对指针使用错误CS0196 一个指针只能指向一个值错误CS0198 静态的只读域不能被赋值错误CS0199 静态的只读域不能为ref 或out 型错误CS0200 只读的属性索引指示器属性不能被赋值错误CS0201 不能作为语句使用错误CS0202 对GetEnumerrator 的调用必须返回类或结构错误CS0203 方法不能作为变量使用错误CS0204 局部变量的取值范围不能超过65536错误CS0205 不能调用基类的方法或属性错误CS0206 属性索引指示器不能作为ref 或out 型传递错误CS0207 访问器不能被声明为unsafe错误CS0208 对可控类型不能取地址或长度错误CS0209 在fixed 语句中声明的局部变量必须为指针类型错误CS0210 fixed 语句中声明时必须初始化错误CS0211 不能对表达式取地址错误CS0212 在fixed 语句中的初始化时不能取非fixed 型表达式的地址警告3 级CS0213 不需要使用fixed 语句来取fixed 型表达式的地址错误CS0214 指针必须在unsafe 环境中使用错误CS0215 true 或false 操作符必须为bool 类型错误CS0216 操作符需要一个已定义的操作符与之匹配错误CS0217 用户自定义操作符必须与参数有相同的返回类型错误CS0218 类型必须包含操作符true 和false 的声明警告3 级CS0219 变量已赋值但未使用警告3 级CS0220 checked 模式下编译时操作符溢出错误CS0221 常值不能转换为类型可用unchecked 语法错误CS0223 不允许空字符串case 标号错误CS0224 方法不能同时有paras 参数和varargs错误CS0225 paras 参数必须是一维数组错误CS0227 unsafe 编译时才能出现非操控代码错误CS0228 类型不包含成员定义或定义不可达错误CS0229 成员间定义模糊错误CS0230 foreach 语句缺少类型和标识符错误CS0231 params 参数表和-arglist 参数不能有下列变量错误CS0233 sizeof 只能用于unsafe 模式错误CS0234 类名或名字空间名未定义错误CS0235 代表中不能有-arglist错误CS0236 域初始化不能引用非静态的域方法或属性错误CS0500 抽象类成员不能声明实体错误CS0501 非抽象或外部的成员函数必须声明实体错误CS0502 类是抽象且封闭的错误CS0503 抽象方法不能标记为虚错误CS0504 常变量不能标记为静态错误CS0505 成员不能覆盖继承的非函数成员错误CS0506 函数不能覆盖继承的函数因函数不是virtual abstract 或override的性质错误CS0507 覆盖继承成员函数2 时函数1 不能改变访问调节器错误CS0508 函数1 覆盖继承成员函数2 时不能改变返回类型错误CS0509 不能从封口类型继承错误CS0513 抽象类包含于非抽象类中错误CS0514 静态构造函数不能有外部this 指针和基构造函数调用错误CS0515 静态构造函数不允许访问调节器错误CS0516 构造函数不能调用自身错误CS0517 无基类不能调用基类构造函数错误CS0518 未定义或引入预定义类型错误CS0519 名字与预定义名字空间冲突错误CS0520 名字与预定义类型冲突错误CS0522 结构不能调用基类构造函数错误CS0523 结构成员互相引用构成圈错误CS0524 接口不能声明类型错误CS0525 接口不能包含域错误CS0526 接口不能包含构造函数错误CS0527 接口类型表中有非接口类型错误CS0528 接口已处于接口列中错误CS0529 接口互相继承构成圈错误CS0531 接口成员不能有定义错误CS0533 派生类成员隐藏了继承的基类抽象成员错误CS0534 方法没有执行继承的抽象方法错误CS0535 类没有执行接口成员错误CS0536 类没有执行接口成员类成员是静态非公有或返回类型错误错误CS0538 外部接口声明中的名字不是接口错误CS0539 外部接口声明中的成员不是接口成员错误CS0540 包含类型不执行接口错误CS0541 外部接口不能在类和结构中声明错误CS0542 用户自定义成员名不能与包含类型相同错误CS0543 计数器的值过大错误CS0544 属性不能覆盖继承的非属性错误CS0545 函数不能覆盖因为没有可覆盖属性错误CS0546 不能覆盖因为没有可覆盖属性错误CS0547 属性和索引器不能有void 类型错误CS0548 属性和索引器必须至少有一个存取程序错误CS0549 函数是封口类的新虚成员错误CS0550 加入了一个接口成员找不到的访问程序错误CS0551 外部接口执行缺少访问程序错误CS0552 不允许用户自定义与接口有关的转换错误CS0553 不允许用户自定义与基类有关的转换错误CS0554 不允许用户自定义与派生类有关的转换错误CS0555 不允许用户自定义包含类型之间的转换错误CS0556 用户自定义转换必须以包含类型为源类型或目标类型错误CS0557 类中不能出现重复的用户自定义转换错误CS0558 用户自定义操作符必须是静态或公有错误CS0559 ++和-操作符的返回类型和参数必须是包含类型错误CS0560 访问程序1 不能覆盖被函数隐藏的访问程序2错误CS0561 函数不能覆盖由专门编译器产生的方法错误CS0562 unary 操作符的参数必须是包含类型错误CS0563 二进制操作符的一个参数必须是包含类型错误CS0567 接口不能包含操作符错误CS0568 结构不能包含外部无参数构造函数错误CS0569 方法不能覆盖非方法错误CS0570 类引用了语言不支持的类型错误CS0571 函数不能在外部调用操作符和访问器错误CS0572 不能通过表达式引用类型请尝试path-to-type错误CS0573 结构中不能有域初始化实例错误CS0574 析构函数名必须与类名匹配错误CS0575 只有类类型可以有构造函数错误CS0576 名字系统已有system 的别名错误CS0577 构造函数析构函数操作符和外部接口执行的condictional 属性无效错误CS0578 返回类型为空的函数condictionak 属性无效错误CS0579 属性重复错误CS0580 太多未命名变量定义了属性错误CS0581 该属性不适用于命名变量错误CS0582 接口成员的conditional 属性无效错误CS0583 内部编译错请用/bugreport 选项创建故障报告并提交给问题报告处理人错误CS0584 内部编译错阶段符号错误CS0585 内部编译错阶段错误CS0586 内部编译错阶段错误CS0587 内部编译错阶段错误CS0588 内部编译错LEX 阶段错误CS0589 内部编译错PARSE 阶段错误CS0590 用户自定义操作符不能返回void 类型错误CS0591 变量属性包含非法值错误CS0592 属性赋给错误的类型错误CS0594 浮点常量越界错误CS0595 只能在空类型中指定该属性错误CS0596 guid 属性必须于comimport 属性一起指定错误CS0597 该属性缺少未命名变量错误CS0598 无效的guid 特征参数该参数的变量必须是形式为XXXXXXXX-XXXX-XXXX-XXXX-XXXXXXXXXXXX 的常字符串错误CS0599 属性隶属于非法命名变量错误CS0601 dllimport 属性必须在静态或外部方法中指定警告1 级CS0602 不赞成使用旧特性请使用新特性错误CS0608 方法不能同时标记为dllimport 和sysnative错误CS0609 不能在标记为override 的索引器中建立同样的属性错误CS0610 域不能是System.TypedReference 类型错误CS0611 数组元素不能是System.TypedReference 类型错误CS0612 成员已作废错误CS0614 不能定义与system.variant 有关的用户自定义转换错误CS0616 不是属性类型错误CS0617 试图访问私有成员失败警告1 级CS0618 成员已作废错误CS0619 成员已作废错误CS0620 索引器不能有void 类型警告1 级错误CS0621 抽象成员和虚成员不能为私有错误CS0622 不能用数组初始化表达式给非数组类型初始化错误CS0623 数组初始化只能用于域或变量的初始化错误CS0624 returnshresult 属性只能位于dllimport 或成员为COM 标准接口的方法中错误CS0625 标记有structlayout 的域类型实例必须有structoffset 属性错误CS0626 没有标记dllimport 或sysnative 的外部方法不能执行错误CS0627 非外部方法不能有sysnative 属性错误CS0628 封口类定义了新保护成员错误CS0629 接口执行过程中不能使用conditional 属性错误CS0630 联合的成员是类或引用类型错误CS0631 索引器不能是ref 或out 参数错误CS0632 命名的属性变量不能是只读类型错误CS0633 传递给名字属性的变量必须是有效的标识符错误CS0634 变量仅对System.Interop.UnmanagedType.CustomMarshaller 类型有效错误CS0635 System.Interop.UnmanagedType.CustomMarshaller 需要命名变量ComType 和Marshal错误CS0636 structoffset 属性只能位于标记有structlayout 的类型中错误CS0637 静态域和常域不允许structlayoff 属性错误CS0638 未定义全局标识符错误CS0640 生成集合前不允许建立全局属性集错误CS0641 该属性只有在System.Attribute 的派生类中有效警告3 级CS0642 空语句可能导致错误错误CS0643 属性变量重复命名错误CS0644 类不能从基类继承错误CS0645 标识符过长错误CS0646 包含索引指示器的类型不能指定System.Reflection.DefaultMember Attribute 错误CS0647 发表属性出错错误CS0648 语言不支持的类型警告3 级CS0649 域未分配值将始终用缺省值错误CS0650 数组声明符语法错错误CS0651 语法错全局属性必须是文件范围错误CS0652 常量越界错误CS0653 不能应用抽象的属性类错误CS0654 无变量表的方法引用错误CS1001 需要标识符错误CS1002 需要错误CS1003 语法错误缺少字符错误CS1004 双重修饰符错误CS1005 非法间接引用类型错误CS1007 属性访问器已定义错误CS1008 缺少byte, sbyte, short, ushort, int, uint, long, 或ulong 类型错误CS1009 无法识别的脱离顺序错误CS1010 串没有正确定界错误CS1011 字符赋值为空错误CS1012 多字符赋值给同一字符变量错误CS1013 无效数字错误CS1014 缺少get 或set 方法错误CS1015 需要一个对象串或类类型错误CS1016 需要命名的属性变量错误CS1017 try 语句已经包含一个空catch 块错误CS1018 需要关键字this 或base错误CS1019 需要可重载的unary 操作符错误CS1020 需要可重载的二进制操作符错误CS1021 整数常量越界错误CS1022 缺少类或名字空间定义或文件尾错误CS1023 内嵌语句不能是声明或标号语句错误CS1024 需要预处理器指令错误CS1025 缺少单行注释或行尾标志错误CS1026 缺少错误CS1027 缺少#endif 指令错误CS1028 不该有的预处理器指令错误CS1029 #error 文字警告1 级CS1030 #warning 文字错误CS1031 缺少类型定义错误CS1032 必须在文件开始处#define 或#undef 预处理器符号错误CS1033 编译器限制越界文件不能超过最大行数限制错误CS1034 编译器限制越界行不能超过最大字符数限制错误CS1035 找到文件尾标记需要*/错误CS1036 缺少或.错误CS1037 缺少可重载操作符错误CS1038 缺少#endregion 指令错误CS1039 无法终止的字符串错误CS1040 预处理器指令必须位于行首第一个非空字符处错误CS1041 缺少标识符错误CS1042 关键字不能包含统一代码逃逸顺序错误CS1501 没有对带有数值类型参数的方法的重载错误CS1502 最佳的重载方法声明中含有无效的参数错误CS1503 无法对方法的参数进行类型转换错误CS1504 无法打开源文件错误CS1505 编译选项缺少文件说明错误CS1506 输出文件不在装配目录下错误CS1507 建立模块时无法链接源文件错误CS1508 装配中已使用了源标识符错误CS1509 引用的文件不是一个装配换用选项/add module错误CS1510 ref 或out 类型参数必须为一个值错误CS1511 关键字base 在静态方法中无效错误CS1512 关键字base 在当前环境中无效错误CS1513 缺少}错误CS1514 缺少{错误CS1515 源文件被包含多次错误CS1516 源文件被指定多次错误CS1517 无效的处理器表达式错误CS1518 缺少类代表枚举接口结构或联合错误CS1519 使用类结构或接口成员的声明无效错误CS1520 类结构或接口的方法应有返回值错误CS1521 无效的基类型警告1 级CS1522 switch 语句块为空警告1 级CS1523 switch 语句代码前应有case 或default 关键字错误CS1524 缺少catch 或finally错误CS1525 表达式中含有无效字符错误CS1526 new 表达式中的类型后应有或[]错误CS1527 名字空间的元素不能显式声明为私有的或保护的错误CS1528 缺少或=错误CS1529 using 子句应该在名字空间其它元素之前错误CS1530 对名字空间的元素不允许使用new 或unsafe 关键字错误CS1532 属性或索引指示器属性不能同时重载一个访问器而覆盖另一个访问器错误CS1533 代表不能直接调用错误CS1534 二元操作符重载只能有两个参数错误CS1535 一元操作符重载只能有一个参数错误CS1536 void 参数类型无效错误CS1537 别名使用指示符在名字空间中已经出现过错误CS1538 不能通过包含类的派生类型来引用类型错误CS1539 非法的分割符错误CS1540 不能通过全权名访问保护类型成员错误CS1541 选项无效符号中不能包含目录错误CS1542 ‘dll’不能加入到装配中它已存在于另一个装配中应使用/R 选项错误CS1545 语言不支持属性或索引指示器属性引用的类型尝试直接调用读或写访问器错误CS1546 语言不支持属性或索引指示器属性引用的类型尝试直接调用访问器错误CS1547 当前环境中不允许使用void 关键字错误CS1548 标记装配时密码错误错误CS1549 找不到适当的密码服务错误CS1551 索引指示器至少应有一个参数错误CS1552 指定数组类型时[] 应该出现在参数名称前错误CS1553 非法声明应使用修饰符+参数类型+ 的格式错误CS1554 非法声明应使用类型+操作符+ 的格式错误CS1555 程序中Main 方法找不到包含的类错误CS1556 Main 方法的所有者应是一个有效的类或结构错误CS1557 第一个输出文件中找不到包含Main 方法的类而在第二个输出文件中找到错误CS1558 类中没有合适的Main 方法错误CS1559 导入的对象不能作为程序的入口使用错误CS1560 #line 指定的文件名太长错误CS1562 无源输出应指定选项/out错误CS1563 输出的文件没有任何源文件错误CS1565 指定选项冲突win32 res 和win32 icon错误CS1566 读源文件错误错误CS1567 生成win32 资源文件时出错错误CS1569 生成XML 文档错警告1 级CS1570 XML 注释生成错误格式的XML 文档错误CS1571 XML 注释参数标记重复警告2 级错误CS1572 找不到XML 注释含有的参数标记警告4 级错误CS1573 XML 注释含有的参数标记与实际参数不符警告1 级错误CS1574 XML 注释含有的cref 特征项找不到错误CS1575 分配堆栈的表达式在类型后应有[]错误CS1576 #line 指示符后缺少指定的行数错误CS1577 装配错误错误CS1578 缺少文件名单行注释或行结尾错误CS1579 foreach 语句声明的类型没有定义或者不可访问错误CS1580 XML 注释含有的cref 特征项中有无效的参数个数错误CS1581 XML 注释含有的cref 特征项中有无效的返回值错误CS1583 文件不是有效的win32 资源文件错误CS1585 成员修饰符的关键字应出现在成员类型或名称前错误CS1586 数组创建时应有数组长度或数组的初始化错误CS1600 编译被用户中断错误CS1900 警告级别应在0~4 之间错误CS1901 指定的选项冲突0 警告级别警告提升为错误错误CS1904 无效的警告数目错误CS2000 编译器初始化错误错误CS2001 找不到源文件错误CS2002 源文件指定多次错误CS2003 响应文件包含多次错误CS2005 命令行选项缺少指定的文件错误CS2006 命令行语法错误switch 语句缺少文字错误CS2007 无法识别的命令行选项错误CS2008 没有指定的输入错误CS2011 无法打开响应文件错误CS2012 无法打开文件进行修改错误CS2013 映像基准数无效错误CS2014 旧的命令行选项已过时请使用新的错误CS2015 文件不是源代码文件而是二进制文件错误CS2016 代码页无效或没有安装错误CS2017 对同一输出文件不能使用/main 和/dll错误CS2018 打不开消息文件cscmsgc.dll错误CS2019 /target 目标类型无效请指明exe winexe library 或module错误CS2020 只有首先输出的文件才能建立目标而不是module错误CS2021 文件名太长或无效错误CS3000 带有变量参数的方法不符合CLS错误CS3001 参数类型不符合CLS错误CS3002 方法返回值不符合CLS错误CS3003 变量类型不符合CLS错误CS3004 混合和分解的unicode 字符不符合CLS错误CS3005 只有大小写不同的指示符不符合CLS错误CS3006 只有ref 和out 不同的指示符不符合CLS错误CS3008 指示符不符合CLS错误CS3009 基类型或接口不符合CLS错误CS3010 符合CLS 的接口不能有不符合CLS 的成员错误CS3011 不符合CLS 的成员不能是抽象的错误CS3012 在模块中不能指定符合CLS 的属性错误CS3013 添加的模块不符合CLS 或者缺少符合CLS 的特征错误CS3014 成员不能被标记为符合CLS 因为装配没有标记为符合CLS 的错误CS3015 数组类型的方法特征参数不符合CLS错误CS5000 未知的编译器错误警告1 级CS5001 程序输出文件不包含已定义的入口。
大众CC 用户手册(中文)说明书

用户手册CC、大众汽车 CC2013 年 5 月中文版用户手册:CC、大众汽车 CCStand: 21.03.2013Chinesisch VR China: 05.2013Artikel-Nr.: 142.5C1.PCC.741425C1PCC74符号说明表示参阅某个章节内的需始终遵守的带重要信息和安全提示 的段落。
该箭头表示该段落转接到下一页。
该箭头表示一个段落结束。
该符号表示必须尽快停车的情况。
®该符号标记一个注册商标。
没有这个标记并不意味着确保可以无偿使用。
⇒ 这类符号表示参阅相同段落中或所给页面上的警告提示,以指出可能存在的事故和受伤危险以及如何避免。
⇒ ⇒ ⇒ 参阅相同段落中或所给页面上可能的物品损坏。
提示带有这个符号的文字内容指出忽视时可能会导致汽车损坏的情况。
带有这个符号的文字内容包含关于环境保护的提示。
带有这个符号的文字内容包含附加信息。
Volkswagen AG 对所有车型都在不断进行后续开发。
因此请谅解,在汽车外形、装备和技术等供货范围内随时都可能有所改变。
关于汽车供货范围、外观、功率、尺寸、重量、耗油量、标准和功能等方面的说明以至定稿日期时的信息状态为准。
某些配置可能稍后才会提供(具体情况请咨询当地大众汽车合作伙伴),或仅提供给某些国家的市场。
本说明书中的数据、附图和说明不能作为提出任何要求的依据。
未经 Volkswagen AG 书面许可,不得全部或部分翻印、复制或翻译本说明书。
依据著作权法,Volkswagen AG 声明对本说明书保留一切权利。
保留修改的权利。
德国印刷。
© 2013 Volkswagen AG本说明书用纸系用无氯漂白纸浆制成。
衷心感谢您的信任此款大众汽车为您提供了最现代的技术以及大量在日常驾驶中便能享受到的舒适装备。
首次使用前请阅读并遵守本用户手册中的信息,以快速全面地熟悉汽车以及能识别并避免可能给您和他人带来的危险。
如果您对汽车还有其他问题或认为车载手册不全,敬请垂询大众汽车合作伙伴。
基于CC430的智能型线路故障指示器的研制

线路 , 不仅 具有 短路 、 地 故 障翻 牌 闪 光 指 示 功 能 , 能 通 过 指 示 器 中 的 数 字 化 无 线 通 信 接 还
模 块把 信 息传 到监 控 中 心 , 方便 工 作人 员 迅速 确 定 故 障 点位 置 。整 个 系统 由CP U模 块 、 电
源模 块 、 号 调 理 模 块 、 牌 驱 动 模 块 、 线 通信 模 块等 组成 。 目前 , 研 制 的故 障指 示 器 信 翻 无 所
产 品 已经通 过 实验 室检 测 , 并成 功应 用 于三 门峡 豫 灵 线 等 输 电线路 , 取得 了很 好 的 效 果 。
关键 词 : C 3 ; 线单 片 机 ; 障 指 示 ; 相 接地 C 4 0无 故 单中 图分 类 号 : P T 2 文 献标 志码 : B
De eo v l pme t o h n e l e t Fa t nd c t r Ba e On CC4 0 n f t e I t l g n ul i I i a o s d 3
t e c r mo ul wiee s c h ad d e、 r ls ommu c in mo ul nia o t d e。 At prs n , e a l i iao h v b e de e o e t o g te e e t t f ut ndc tr a e e n h vlp d h u h h
A s atIt d c o h api tn fs nl netn e o n te ig - h s rud al e ci d bt c : r u tn te pl a o o i a jco m t d i h s l p ae on f t t t n a r no i ci g i i h ne g u d e o n
大众汽车电脑编码大全

大众电脑编码大全奥迪A62.8L01)3B0907551BF2.8L V6/5V G01001CODING:0455202)4B0927156AJ AG501V2.8L5V USA3132CODING:0000403)3B0614111ABS/ASR5.3FRONT D00CODING:0003115)4B0959655G Airbag Fronttseite2001CODING:0000435)4B0962258J Central Lock/Alarm D35CODING:0673145?)4B0907357LEDCHTWETTEREGLER D004CODING:0000536)4B0959608Sitzmamnory R1F000CODING:0000056)4C0035186Radio D02CODING:0020766)4B0919283ParkingSystem A6Row D18CODING:0110617)4C0920930A Ch-kOMRIINSTR VDO D12CODING:0016208)4B0820043AF A6-Klimavnllautomat D65coding:00160奥迪A62.4LVIN:VBA24B013014521?15??01)3B0907552AD2.4L V6/5V G0000CODING:0455202)4B0927156AL AG501V2.4L5V RHW2526CODING:0001303)3B0614111ABS/ASR5.3FRONT D00CODING:0003115)4B0959655G Airbag Fronttseite2000CODING:0000435)4B0962258E Zentralverrieg.DWA D34CODING:0468345)4B0951178A(?Unnenmumueberw)D04CODING:0000136)4B0959760A Sitzmemnry D0556)4C0035186Radio D02CODING:00207 66)4B0919283Parkingsystem A6ROW D18CODING:0010617)4C0920930A C5-KOMHI INSTR VDO D09CODING:0006208)4B0820043AF A6-Klimavcllautomat D65CIDING:00160大众奥迪1.8L01)4R0906018CA1.8L R4/5VT0003CODING:0450203)3B0614111ABS/ASR5.3FRONT D00CODING:0002215)4B0959655G Airbag Frongt+Seite2001CODING:0000435)4B0962258J Central lock/Alarm D35CODING:0000156)4C0035186Radio CODING:0020117)4C0920900A C5-KOMRI INSTR VDO D12CODING:0014408)4B0820043H A6-Klimauollautomat D64CODING:00140宝来 1.8L01)06A906032LD1.8L R4/5VT0001CODING:0453002)01M927733LL AG4Getribe01M4956coding:0000003)1c0907379K ASR PRONT MK600103CODING:002150515)1C09096012K Airbag VW510004CODING:1287546)1C0959799C18Komfortger BF HLO0003CODING:0025956)3BD035186Radio5GD0001CODING:0040317)1J5920826A KOMRITWEGFAHRSP VDO V04CODING:0512208)3B1907044C CLIMATRONIC C2.0.0CODING:0110019)6N0909901Gateway k<->CAN0000CODING:000062002上海大众B5V62.8L自动波全车电脑版本号地址码:01-发动机零件号码:3B0907551CP 2.8L V6/5V G0001Coding号:08051维修站号码:00000地址码:02-自动波零件号码:8D0927156DJ AG501V2.8l5V RdW1111Coding号:00113维修站号码:66187地址码:03-ABS/ESP零件号码:1J0907379Q ABS/EDS20IE CAN0001Coding号:13604维修站号码:00000地址码:08-空调系统冷气/暖气零件号码:3B1907044J CLIMATRONIC B5GP0003Coding号:17000维修站号码:66187地址码:15-Airbags气囊系统零件号码:1C0909605B XJ AIRBAG VW510402*XJ为软件索引号Coding号:22602维修站号码:66187地址码:17-仪表与IMMO址码:36-司机侧座椅调节零件号码:3B1959760D Sitzverstellung0101Coding号:0000000维修站号码:00000地址码:55-射灯控制零件号码:4B0907357LEUCHTWEITEREGLER D004Coding号:00015维修站号码:66187宝来汽车电脑器件型号01-发动机:06A906032EQ 1.6L5V MQ2004680CODING:00031WSC:00000VIN:LFVBA11JX23049994IMMO_SN:VWZ7Z0B642230915-安全气囊:1C09096012K AIRBAG VW510006CODING:12875WSC:1031503-ABS电脑:1C0907379L0101ABS FRON7MK60CODING:0001025WSC:0000025-IMMOBILZER电子防盗:Bitte Adresse17engeben46-中控与适系统:1C09597992M Komfortgerât HLO00001CODING:00259WSC:000001C1959801A1M TJrsteuer FS KLO000917-组合仪表(防盗)电脑版本:1J5920806b komb1+wegfarlrsp vdo v02coding:01102wsc:00000VIN:LFVBA11JX23049994IMMO_SN:VWZ7Z0B6422309 19-网关:6N0909901Gateway k<->can0001coding:00006wsc:00000AUDI A41.808-空调系统4A0820043DCODING000400006000061桑塔纳2000时代骄子安全气囊1C09096012N AIRBAG VW510008CODING:12878WSC:01234C5发动机4D0907551AH CODING号码01-ENGINE发动机系统4D0907551AH 2.8L V6/5V MOTR HS D04Coding:06201WSC06335宝来汽车电脑版本号01-发动机:06A906032JB 1.6L5V ATAG44629CODING:0003302-自动变速箱零件号码01M927733KK组件AG4GETRIEBE01M4989Coding号0000017-组合仪表(防盗)电脑版本:1J5920806C komb1+wegfaHrsp vdo v02coding:01102wsc:0000046-舒适系统零件号码1C0959799组件1M KOMFORTGERâtHLO0002Coding号00259斯科达法比亚气囊电脑VAG NUMBER Index CODING=====================1J0909603AS AIRBAG167231J0909603AT AIRBAG167242002Jetta1.8T电脑版本号01--发动机:06A906032HF 1.8L R4/5VT G0004Coding:07550WSC1362202--自动波09A927750T AG5Getriebe09A019303--ABS:1C0907379K ASR FRONT MK600103Coding:0018945WSC0002817--仪表/IMMO:1J5920926AX KOMBI+WEGFAHRSP VDO V11Coding:07204WSC2258519--网关6N0909901Gateway K<->CAN0001Coding:00006WSC2258546--中控与舒适系统1C0959799C1H Komfortger醫HLO0003Coding:00257WSC 0002856--收放机3B7035180Radio NP20055Coding:00031WSC00028美规原装奥迪A6.2.8L手动自动两用波箱电脑型号发动机电脑:4D0907551AH2.8L V6/5V MOTRAT D02CODING:06252波箱电脑:4B09271156G AG501V2.8L5V USA8509CODING:00001ABS电脑:8E0614111M ABS/EDS5.3OUATTRO D31CODING:06169仪表电脑:4B0919930RX C5-KOMBIINSTR VDO D15CODING:07262空调电脑:4B0820043G A6-KLIMAVOLL AUTOMAT:D61CODING:00160中央控制门锁:4B0962258C CENTRALLOCK/ALARM D30CODING:15885宝来1.6L A/T发动机的CODING:00033ABS:0001025A/T:00000仪表:01102音响:00001舒适性系统:00259捷达:1.6l A/T发动机的CODING:04030A/T:03604SRS:00065防盗:09600捷达都市先锋发动机:04003A/T:00000ABS:03604一汽新A6address01Protocol:KW1281Controller:3B0907551CKComponent:2.8L V6/5V0002Coding:08502Shop#:WSC00000Address03Protocol:KW1281Controller:3B0614111Component:ABS/ASR5.3FRONT D00Coding:00032Shop#:WSC00000Address17Protocol:KW1281Controller:4C0920930BComponent:C5-KOMBIINSTR.VDO D12Coding:00162Shop#:WSC0000001-发动机4B0906018CL 1.8L R4/5VT G0001Coding:16551WSC00008WVWPD63B61P269969VWZ7Z0A355186302-自动波4B0927156DA AG501V1.8l5VT RdW1313Coding:00013WSC0000803-ABS3B0614111ABS/ASR5.3FRONT D00Coding:00021WSC0002817-仪表&IMMO3B0920925B KOMBI+WEGFAHRSP VDO V13Coding:07235WSC00008WVWPD63B61P269969VWZ7Z0A3551863 46-中控与舒适系统1C0959799C08Komfortger醫HLO0001Coding:00257WSC00008A6.2.8波箱控制单元编码4B0927156G AG501V 2.8L5V USA8509编码号是00001原装奥迪A6电脑型号美规原装奥迪A6.2.8L手动自动两用波箱电脑型号发动机电脑:4D0907551AH2.8L V6/5V MOTRAT D02CODING:06252波箱电脑:4B09271156G AG501V2.8L5V USA8509CODING:00001ABS电脑:8E0614111M ABS/EDS5.3OUATTRO D31CODING:06169仪表电脑:4B0919930RX C5-KOMBIINSTR VDO D15CODING:07262空调电脑:4B0820043G A6-KLIMAVOLL AUTOMAT:D61CODING:00160中央控制门锁:4B0962258C CENTRALLOCK/ALARM D30CODING:15885菠萝转向助力电脑编号6Q0423156Q LenkhilfeTRW V250Coding:10140Code:WSC12345polo波罗 1.4L MT全车电脑版本号01-ENGINE//01-10-d188(含EPC电子油门控制)036906034DM MARELLI4MV4837Coding:00071WSC1234503-ABS6Q0907379L ABS FRONT MK600101Coding:0001097WSC1234508-空调6Q0820045Klimaanlage X084015-AIRBAG6Q0909601E07AIRBAG VW50007Coding:12343WSC1234517-仪表/IMMO6Q0920800KOMBI+WEGFAHRSP VDO V16Coding:00141WSC57952LSVFA49J732012842VWZ7Z0C683158519-网关6N090990114GATEWAY CAN1S33Coding:00014WSC1234546-J393(T23+T12C)舒适系统6Q0959433G4W Komfortgera0002Coding:00064WSC12345(coding为00264可多控制后面2个门)J386(T12d+T8h+t12e)左前门:6Q2959802A4W Tusteuer.FS KLO0001J387(T8i+T6p+T12f)右前门:6Q2959801A4W Tusteuer.BF KLO000156-收放机6QD035152Radio5GD0001Coding:00001WSC1234509-电源与继电器管理6Q1937049C00BN-SG.1S33Coding:25612Code:WSC1234544-转向助力6Q0423156Q LenkhilfeTRW V250Coding:10140Code:WSC1234503-ABS6Q0907379L ABS FRONT MK600101Coding:0001097WSC12345上海大众菠萝全车电脑版本号156Q0909601E07AIRBAG VW50007CODING:12343176Q0920800&...........VDO V13CODING:00141196N090990114CE CANcoding:00014096Q1937049C00.BN-SG1S32coding:25612010********DM m......4MZ4449coding:000710106A906032JCME7.5.104686coding:00071036Q0907379E0103ABS MK60coding:000109799新秀发动机CODING:06169ABS:01901SRS:12878捷达发动机CODING:00001ABS:01901SRS:12336点子防盗:10400红旗发动机CODING:00000-00003ABS:06272点子防盗:0960094奥迪V6防盗电脑版本:4A0953234,8D0953234,可互用帕萨特B5电脑编号:发动机:3B0907551CT CODING:08551ABS:3Q0614517B CODING:04297。
CC430学习笔记----(四)时钟系统

CC430学习笔记----(四)时钟系统网友juring作品大家都知道,单片机工作离不开时钟,在我们熟悉的51单片机里面,就是外部那个11.0592M 或者12M的晶振给单片机的CPU和片上外设提供时钟节拍。
430也是一样,但是430的时钟系统比51要先进和复杂很多。
51的时钟源只有一个,来自外部晶振,直接提供给内部工作;而430的时钟是一个专门的模块,至少有3个可选时钟源(CC430有5个),这些基本的时钟源不直接提供给CPU和外设使用,而是经过一些数据选择器和分频器,得到3个有用的时钟信号。
430的CPU和片上外设可以根据需要,选择这3个时钟信号中合适的时钟。
430的低功耗跟它的时钟系统有很大关系。
CC430的时钟模块叫UCS(Unified Clock System),模块示意图:CC430中一共有5个时钟源:XT1CLK、VLOCLK、REFOCLK、DCOCLK、XT2CLKXT1CLK:这是一个低频时钟源,由外部提供,一般是外接32.768kHz的手表晶振,无需外加电容。
VLOCLK:这是一个集成在片上时钟源,低频低功耗,频率典型值是10kHz。
REFOCLK:这也是一个片上时钟源,频率典型值32.768kHz。
DCOCLK:这是一个片上的DCO数控振荡器,可以用片上FLL锁定。
XT2CLK:这是一个高频时钟源,由外部提供,用来给CC430的RF 模块提供时钟,一般是外接26MHz晶体振荡器。
其中,片上时钟VLOCLK、REFOCLK不是很精确稳定,会受到温度和电压的影响。
一般对精度和稳定性要求不高的应用可以选择片上时钟。
DCOCLK因为有FLL的锁定,所以可以提供非常稳定的时钟。
DCOCLK分频之后的时钟DCOCLKDIV一般提供给MCLK和SMCLK。
经过时钟系统出来一般有3个时钟信号:ACLK、MCLK、SMCLK ACLK: 辅助时钟(Auxillary Clock)ACLK可由软件选择作为各个外围模块的时钟信号,一般用于低速外设。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
//***************************************************************************** *// C430F613x Demo - ADC12_A, Sample A0, Set P1.0 if A0 > 0.5*AVcc//// Description: A single sample is made on A0 with reference to A Vcc.// Software sets ADC12SC to start sample and conversion - ADC12SC// automatically cleared at EOC. ADC12 internal oscillator times sample (16x)// and conversion. In mainloop CC430 waits in LPM0 to save power until ADC12// conversion complete, ADC12_ISR will force exit from LPM0 in Mainloop on// reti. If A0 > 0.5*A Vcc, P1.0 set, else reset.//// CC430F6137// -----------------// /|\| |// | | |// --|RST |// | |// Vin -->|P2.0/A0 P1.0|--> LED//// M Morales// Texas Instruments Inc.// April 2009// Built with CCE Version: 3.2.2 and IAR Embedded Workbench Version: 4.2//***************************************************************************** *#include "cc430x613x.h"void main(void){WDTCTL = WDTPW + WDTHOLD; // Stop WDTADC12CTL0 = ADC12SHT02 + ADC12ON; // Sampling time, ADC12 onADC12CTL1 = ADC12SHP; // Use sampling timerADC12IE = 0x01; // Enable interruptADC12CTL0 |= ADC12ENC;P2SEL |= BIT0; // P2.0 ADC option selectP1DIR |= BIT0; // P1.0 outputwhile (1){ADC12CTL0 |= ADC12SC; // Start sampling/conversion__bis_SR_register(LPM0_bits + GIE); // LPM0, ADC12_ISR will force exit__no_operation(); // For debugger}}#pragma vector = ADC12_VECTOR__interrupt void ADC12_ISR(void){switch(__even_in_range(ADC12IV,34)){case 0: break; // Vector 0: No interruptcase 2: break; // Vector 2: ADC overflowcase 4: break; // Vector 4: ADC timing overflowcase 6: // V ector 6: ADC12IFG0if (ADC12MEM0 >= 0x7ff) // ADC12MEM = A0 > 0.5A Vcc?P1OUT |= BIT0; // P1.0 = 1elseP1OUT &= ~BIT0; // P1.0 = 0__bic_SR_register_on_exit(LPM0_bits); // Exit active CPUcase 8: break; // Vector 8: ADC12IFG1case 10: break; // Vector 10: ADC12IFG2case 12: break; // Vector 12: ADC12IFG3case 14: break; // Vector 14: ADC12IFG4case 16: break; // Vector 16: ADC12IFG5case 18: break; // Vector 18: ADC12IFG6case 20: break; // Vector 20: ADC12IFG7case 22: break; // Vector 22: ADC12IFG8case 24: break; // Vector 24: ADC12IFG9case 26: break; // Vector 26: ADC12IFG10case 28: break; // Vector 28: ADC12IFG11case 30: break; // Vector 30: ADC12IFG12case 32: break; // Vector 32: ADC12IFG13case 34: break; // Vector 34: ADC12IFG14default: break;}}//***************************************************************************** *// CC430x613x Demo - COMPB output Toggle in LPM4; internal 2.0V reference//// Description: Use CompB and internal reference to determine if input'Vcompare'// is high of low. When Vcompare exceeds 2.0V CBOUT goes high and when// Vcompare is less than 2.0V then CBOUT goes low.// Connect P1.6/CBOUT to P1.0 externally to see the LED toggle accordingly.//// CC430x613x// ------------------// /|\| |// | | |// --|RST P2.0/CB0|<--Vcompare// | |// | P1.6/CBOUT|----> 'high'(Vcompare>2.0V); 'low'(Vcompare<2.0V)// | | |// | P1.0 |__| LED 'ON'(Vcompare>2.0V); 'OFF'(Vcompare<2.0V) // | |//// M Morales// Texas Instruments Inc.// April 2009// Built with CCE Version: 3.2.2 and IAR Embedded Workbench Version: 4.11B//***************************************************************************** *#include "cc430x613x.h"void main(void){WDTCTL = WDTPW + WDTHOLD; // Stop WDTP1DIR |= BIT6; // P1.6 output directionP1SEL |= BIT6; // Select CBOUT function on P1.6/CBOUTPMAPPWD = 0x02D52; // Get write-access to port mapping regs P1MAP6 = PM_CBOUT0; // Map CBOUT output to P1.6 PMAPPWD = 0; // Lock port mapping registersP2SEL |= BIT0; // Select CB0 input for P2.0// Setup ComparatorBCBCTL0 |= CBIPEN + CBIPSEL_0; // Enable V+, input channel CB0CBCTL1 |= CBPWRMD_1; // normal power modeCBCTL2 |= CBRSEL; // VREF is applied to -terminalCBCTL2 |= CBRS_3+CBREFL_2; // R-ladder off; bandgap ref voltage (1.2V)// supplied ref amplifier to get Vcref=2.0V (CBREFL_2)CBCTL3 |= BIT0; // Input Buffer Disable @P6.0/CB0 CBCTL1 |= CBON; // Turn On ComparatorB__delay_cycles(75);__bis_SR_register(LPM4_bits); // Enter LPM4__no_operation(); // For debug}//***************************************************************************** *// CC430F613x Demo - Reset on Invalid Address fetch, Toggle P1.0//// Description: This program demonstrates how a reset is executed if the CPU// tries to fetch instructions from within the module register memory address// range (0x0100 --0x0FEF) or from within unused address ranges. Toggle P1.0// by xor'ing P1.0 inside of a software loop that ends with TAR loaded with// 3FFFh - op-code for "jmp $". This simulates a code error. The CC430F6137// will force a reset because it will not allow a fetch from within the address// range of the peripheral memory, as is seen by return to the mainloop and// LED flash.// ACLK = n/a, MCLK = SMCLK = default DCO ~1.045MHz//// CC430F6137// -----------------// /|\| |// | | |// --|RST |// | |// | P1.0|-->LED//// M Morales// Texas Instruments Inc.// April 2009// Built with CCE Version: 3.2.2 and IAR Embedded Workbench Version: 4.11B//***************************************************************************** *#include "cc430x613x.h"void main(void){WDTCTL = WDTPW + WDTHOLD; // Stop watchdog timer - SET BREAKPOINT HEREP1DIR |= 0x01; // Set P1.0 to output directionTA0R = 0x3FFF; // Valid opcode (for "jmp $")while(1){P1OUT ^= 0x01; // Toggle P1.0 using exclusive-OR__delay_cycles(50000); // Delay loop// C code to directly call an address location((void (*)())0x350)(); // Invalid fetch ("call #0350h")/* 0x350 is address of TA0R register and is within the module register memoryaddress range (0x0100 --0x0FEF) */}}//***************************************************************************** *// CC430x613x Demo - DMA0, Repeated Block to-from RAM, Software Trigger//// Description: A 16 word block from 1C00-1C1Fh is transfered to 1C20h-1C3fh// using DMA0 in a burst block using software DMAREQ trigger.// After each transfer, source, destination and DMA size are// reset to inital software setting because DMA transfer mode 5 is used.// P1.0 is toggled durring DMA transfer only for demonstration purposes.// ** RAM location 0x1C00 - 0x1C3F used - make sure no compiler conflict **//// Use the memory view to see memory the valid memory transfers.//// ACLK = REFO = 32kHz, MCLK = SMCLK = default DCO 1048576Hz//// CC430x613x// -----------------// /|\| XIN|-// | | | 32kHz// --|RST XOUT|-// | |// | P1.0|-->LED//// M. Morales// Texas Instruments Inc.// April 2009// Built with CCE v3.1 Build 3.2.3.6.4 & IAR Embedded Workbench Version: 4.11B//***************************************************************************** *#include "cc430x613x.h"void main(void){WDTCTL = WDTPW+WDTHOLD; // Stop WDTP1DIR |= 0x01; // P1.0 output/* Initialize DMA */__data16_write_addr((unsigned short) &DMA0SA,(unsigned long) 0x1C00);// Source block address__data16_write_addr((unsigned short) &DMA0DA,(unsigned long) 0x1C20);// Destination single addressDMA0SZ = 16; // Block sizeDMA0CTL = DMADT_5+DMASRCINCR_3+DMADSTINCR_3; // Rpt, incDMA0CTL |= DMAEN; // Enable DMA0while(1){P1OUT |= 0x01; // P1.0 = 1, LED onDMA0CTL |= DMAREQ; // Trigger block transfer__delay_cycles(64); // Provide sufficient time for DMA xfer__no_operation(); // Set breakpoint hereP1OUT &= ~0x01; // P1.0 = 0, LED off}}//***************************************************************************** *// CC430x613x Demo - Single-Byte Flash In-System Programming, Copy SegC to SegD//// Description: This program first erases flash seg C, then it increments all// values in seg C, then it erases seg D, then copies seg C to seg D. Starting// addresses of segments defined in this code: Seg C-0x1880, Seg D-0x1800.// RESET the device to re-execute code. This is implemented to prevent// stressing of Flash unintentionally.// ACLK = REFO = 32kHz, MCLK = SMCLK = default DCO 1048576Hz//// CC430x613x// -----------------// /|\| XIN|-// | | |// --|RST XOUT|-// | |//// M. Morales// Texas Instruments Inc.// April 2009// Built with CCE v3.1 Build 3.2.3.6.4 and IAR Embedded Workbench v4.11B//***************************************************************************** *#include "cc430x613x.h"char value; // 8-bit value to write to seg C// Function prototypesvoid write_SegC(char value);void copy_C2D(void);void main(void){WDTCTL = WDTPW+WDTHOLD; // Stop WDTvalue = 0; // initialize valuewrite_SegC(value); // Write segment C, increment valuecopy_C2D(); // Copy segment C to Dwhile(1); // Loop forever, SET BREAKPOINT HERE }//------------------------------------------------------------------------------// Input = value, holds value to write to Seg C//------------------------------------------------------------------------------void write_SegC(char value){unsigned int i;char * Flash_ptr; // Initialize Flash pointerFlash_ptr = (char *) 0x1880;__disable_interrupt(); // 5xx Workaround: Disable global// interrupt while erasing. Re-Enable// GIE if neededFCTL3 = FWKEY; // Clear Lock bitFCTL1 = FWKEY+ERASE; // Set Erase bit*Flash_ptr = 0; // Dummy write to erase Flash seg FCTL1 = FWKEY+WRT; // Set WRT bit for write operationfor (i = 0; i < 128; i++){*Flash_ptr++ = value++; // Write value to flash}FCTL1 = FWKEY; // Clear WRT bitFCTL3 = FWKEY+LOCK; // Set LOCK bit}//------------------------------------------------------------------------------// Copy Seg C to Seg D//------------------------------------------------------------------------------void copy_C2D(void){unsigned int i;char *Flash_ptrC;char *Flash_ptrD;Flash_ptrC = (char *) 0x1880; // Initialize Flash segment C ptrFlash_ptrD = (char *) 0x1800; // Initialize Flash segment D ptr__disable_interrupt(); // 5xx Workaround: Disable global// interrupt while erasing. Re-Enable// GIE if neededFCTL3 = FWKEY; // Clear Lock bitFCTL1 = FWKEY+ERASE; // Set Erase bit*Flash_ptrD = 0; // Dummy write to erase Flash seg D FCTL1 = FWKEY+WRT; // Set WRT bit for write operationfor (i = 0; i < 128; i++){*Flash_ptrD++ = *Flash_ptrC++; // copy value segment C to seg D}FCTL1 = FWKEY; // Clear WRT bitFCTL3 = FWKEY+LOCK; // Set LOCK bit}//***************************************************************************** *// CC430x613x Demo - LCD display a single character//// Description: Cycle through several characters in a single position on the// LCDBA from Softbaugh. Put "0123456" on SBLCDA4 LCD.// ACLK = REF0 = 32Khz, MCLK = SMCLK = DCO = Default//// MSP430x631x// -----------------// /|\| |// | | |// --|RST |// | | SBLCDA4// | S4 | -----------------// | - |--> | + 5 4 3 2 1 0 |// | S5 | -----------------// | COM0|-----||||// | COM1|------|||// | COM2|-------||// | COM3|--------|// | |////// Texas Instruments Inc.// Built with CCE Version: 3.2.2.1.4//***************************************************************************** *#include "cc430x613x.h"// LCD Segments#define LCD_A BIT0#define LCD_B BIT1#define LCD_C BIT2#define LCD_D BIT3#define LCD_E BIT6#define LCD_F BIT4#define LCD_G BIT5#define LCD_H BIT7// LCD Segment Mappingconst unsigned char LCD_Char_Map[] ={LCD_A+LCD_B+LCD_C+LCD_D+LCD_E+LCD_F, // '0' or 'O'LCD_B+LCD_C, // '1' or 'I'LCD_A+LCD_B+LCD_D+LCD_E+LCD_G, // '2' or 'Z'LCD_A+LCD_B+LCD_C+LCD_D+LCD_G, // '3'LCD_B+LCD_C+LCD_F+LCD_G, // '4' or 'y'LCD_A+LCD_C+LCD_D+LCD_F+LCD_G, // '5' or 'S'LCD_A+LCD_C+LCD_D+LCD_E+LCD_F+LCD_G, // '6' or 'b'LCD_A+LCD_B+LCD_C, // '7'LCD_A+LCD_B+LCD_C+LCD_D+LCD_E+LCD_F+LCD_G, // '8' or 'B'LCD_A+LCD_B+LCD_C+LCD_D+LCD_F+LCD_G, // '9' or 'g'};void main(void){ volatile unsigned char i;P5SEL |= (BIT5 | BIT6 | BIT7);P5DIR |= (BIT5 | BIT6 | BIT7);//***************************************************************************** **// Configure LCD_B//LCD_FREQ = ACLK/32/4, LCD Mux 4, turn on LCDLCDBCTL0 = (LCDDIV0 + LCDDIV1 + LCDDIV2 + LCDDIV3 + LCDDIV4)| LCDPRE0 | LCD4MUX | LCDON | LCDSON;LCDBVCTL = LCDCPEN | VLCD_3_44;//LCDBCTL0 |= LCDON + LCDSON;REFCTL0 &= ~REFMSTR;//Charge pump generated internally at 3.44V, external bias (V2-V4) generation//Internal reference for charge pumpLCDBPCTL0 = 0x0030; //Select LCD Segments 4-5 LCDBPCTL1 = 0x0000; //while(1){for(i=6;i>0;i--){LCDM3 &= ~LCD_Char_Map[8]; // Clear LCDLCDM3 |= LCD_Char_Map[i-1]; // Display Character__delay_cycles(500000);}}}//***************************************************************************** *// CC430x613x Demo - Enters LPM3 (ACLK = LFXT1)//// Description: Configure ACLK = LFXT1 and enters LPM3. Measure current.// Note: SVS(H,L) & SVM(H,L) are disabled// ACLK = LFXT1 = 32kHz, MCLK = SMCLK = default DCO//// CC430x613x// -----------------// /|\ | XIN|-// | | | 32kHz// ---|RST XOUT|-// | |//// M. Morales// Texas Instruments Inc.// April 2009// Built with CCE Version: 3.2.2 and IAR Embedded Workbench Version: 4.11B//***************************************************************************** *#include "cc430x613x.h"void main(void){WDTCTL = WDTPW+WDTHOLD; // Stop WDTP5SEL |= BIT0 + BIT1; // Select XT1UCSCTL6 |= XCAP_3; // Internal load cap// Loop until XT1,XT2 & DCO stabilizesdo{UCSCTL7 &= ~(XT1LFOFFG + DCOFFG);// Clear LFXT1,DCO fault flags SFRIFG1 &= ~OFIFG; // Clear fault flags}while (SFRIFG1 & OFIFG); // Test oscillator fault flagUCSCTL6 &= ~(XT1DRIVE_3); // Xtal is now stable, reduce drive// strengthP1OUT = 0x00; P2OUT = 0x00; P3OUT = 0x00; P4OUT = 0x00; P5OUT = 0x00;P1DIR = 0xFF; P2DIR = 0xFF; P3DIR = 0xFF; P4DIR = 0xFF; P5DIR = 0xFC;PJOUT = 0x00;PJDIR = 0xFF;// Turn off SVSH, SVSMPMMCTL0_H = 0xA5;SVSMHCTL = 0;SVSMLCTL = 0;PMMCTL0_H = 0x00;__bis_SR_register(LPM3_bits); // Enter LPM3__no_operation(); // For debugger}//***************************************************************************** *// CC430F613x Demo - LFXT1 Oscillator Fault Detection//// Description: System runs normally in LPM3 with with basic timer clocked by// 32kHz ACLK with a 1 second interrupt. If an LFXT1 oscillator fault occurs,// NMI is requested forcing exit from LPM3. P1.0 is toggled rapidly by// software as long as LFXT1 oscillator fault is present. Assuumed only// LFXT1 as NMI source - code does not check for other NMI sources.// ACLK = LFXT1 = 32768Hz, MCLK = SMCLK = default DCO = 32 x ACLK = 1048576Hz // //* An external watch crystal between XIN & XOUT is required for ACLK *//////// CC430F6137// -----------------// /|\ | XIN|-// | | | 32kHz// ---|RST XOUT|-// | |// | P1.0|-->LED//// M. Morales// Texas Instruments Inc.// April 2009// Built with CCE Version: 3.2.2 and IAR Embedded Workbench Version: 4.11B//***************************************************************************** *#include "cc430x613x.h"volatile unsigned int i;void main(void){WDTCTL = WDTPW + WDTHOLD; // Stop WDT// Set up XT1P5SEL |= BIT0 + BIT1; // Analog function for XT1 PinsUCSCTL6 |= XCAP_3; // Internal load capP1DIR |= BIT0; // P1.0 outputRTCCTL01 = RTCTEV_3;RTCPS0CTL = RT0PSDIV_7; // Set RTPS0 to /256RTCPS1CTL = RT1IP_6 + RT1PSIE + RT1SSEL_3;// Set RT1IP to /4, enable// RT1PS interrupt and select// RTOPS output as clockSFRIE1 = OFIE; // Enable osc fault interrupt__bis_SR_register(LPM3_bits + GIE); // Enter LPM3, enable interrupts__no_operation(); // For debugger}// RTC Interrupt Service Routine#pragma vector=RTC_VECTOR__interrupt void RTC_ISR(void){P1OUT ^= 0x01; // Toggle P1.0RTCCTL01 &= ~RTCTEVIFG;RTCPS1CTL &= ~RT1PSIFG;}#pragma vector=UNMI_VECTOR__interrupt void UNMI_ISR(void){do{UCSCTL7 &= ~(XT1LFOFFG + DCOFFG); // Clear XT1 & DCO fault flagsSFRIFG1 &= ~OFIFG; // Clear OSC Fault flagfor (i = 0xFFFF; i > 0; i--); // Time for flag to setP1OUT ^= BIT0; // Toggle P1.0 using exclusive-OR}while ( (SFRIFG1 & OFIFG) );}//****************************************************************************// // Function Library for setting the PMM//// This file is used in conjunction with PMM.c to set the core// voltage level of a device. To set a core voltage level, call// SetVCore(level). See RF project(s) for example usage.//// Original programm Stefan Schauer// Rev 1.1: changed VCoreUp to fit with recommended flow (09/04/2008)////****************************************************************************// #include "cc430x613x.h"#include "PMM.h"//****************************************************************************// // Set VCore level// SetVCore level is called from the user API//****************************************************************************// void SetVCore (unsigned char level) // Note: change level by one step only{unsigned char actLevel;do {actLevel = PMMCTL0_L & PMMCOREV_3;if (actLevel < level)SetVCoreUp(++actLevel); // Set VCore (step by step)if (actLevel > level)SetVCoreDown(--actLevel); // Set VCore (step by step)}while (actLevel != level);}//****************************************************************************// // Set VCore up//****************************************************************************// void SetVCoreUp (unsigned char level) // Note: change level by one step only{PMMCTL0_H = 0xA5; // Open PMM module registers for write accessSVSMHCTL = SVSHE + SVSHRVL0 * level + SVMHE + SVSMHRRL0 * level; // Set SVS/M high side to new levelSVSMLCTL = SVSLE + SVMLE + SVSMLRRL0 * level; // Set SVM new Levelwhile ((PMMIFG & SVSMLDL YIFG) == 0); // Wait till SVM is settled (Delay) PMMCTL0_L = PMMCOREV0 * level; // Set VCore to xPMMIFG &= ~(SVMLVLRIFG + SVMLIFG); // Clear already set flagsif ((PMMIFG & SVMLIFG))while ((PMMIFG & SVMLVLRIFG) == 0); // Wait till level is reachedSVSMLCTL = SVSLE + SVSLRVL0 * level + SVMLE + SVSMLRRL0 * level; // Set SVS/M Low side to new levelPMMCTL0_H = 0x00; // Lock PMM module registers for write access}//****************************************************************************// // Set VCore down//****************************************************************************// void SetVCoreDown (unsigned char level){PMMCTL0_H = 0xA5; // Open PMM module registers for write accessSVSMLCTL = SVSLE + SVSLRVL0 * level + SVMLE + SVSMLRRL0 * level; // Set SVS/M Low side to new levelwhile ((PMMIFG & SVSMLDL YIFG) == 0); // Wait till SVM is settled (Delay) PMMCTL0_L = (level * PMMCOREV0); // Set VCore to 1.85 V for Max Speed.PMMCTL0_H = 0x00; // Lock PMM module registers for write access}//****************************************************************************////***************************************************************************** *// CC430x613x Demo - Port Mapping Port2; Single runtime configuration//// Description: Port2 is port mapped to output TimerA digital signals. TACCR1-3// generate different PWM DutyCycles. TACCR0 generates a square wave of// freq ACLK/2^10 ~32Hz.// MCLK = SMCLK = default DCO; ACLK = REFO~32kHz;//// CC430x613x// ------------------// /|\| |// | | |// --|RST |// | P2.0(TA0CCR0)|--> ACLK/2^10 ~ 32Hz// | P2.2(TA0CCR1)|--> 25%// | P2.4(TA0CCR2)|--> 50%// | P2.6(TA0CCR3)|--> 75%// | P2.7(PM_None)|--> DVSS//// M Morales// Texas Instruments Inc.// April 2009// Built with CCE Version: 3.2.2 and IAR Embedded Workbench Version: 4.11B//***************************************************************************** *#include "cc430x613x.h"// Function Definitionvoid Port_Mapping(void);void main(void){WDTCTL = WDTPW + WDTHOLD; // Stop WDTPMAPPWD = 0x02D52; // Get write-access to port mapping regs P2MAP0 = PM_TA0CCR0A; // Map CBOUT output to P1.6P2MAP2 = PM_TA0CCR1A;P2MAP4 = PM_TA0CCR2A;P2MAP6 = PM_TA0CCR3A;P2MAP7 = PM_NONE;PMAPPWD = 0; // Lock port mapping registers// Setup Port PinsP2DIR |= BIT0+BIT2+BIT4+BIT6+BIT7; // P2.0,2,4,6,7 outputP2SEL |= BIT0+BIT2+BIT4+BIT6+BIT7; // P2.0,2,4,6,7 Port Map functions// Setup TB0TA0CCTL0 = OUTMOD_4; // CCR1 toggle/setTA0CCR0 = 256; // PWM Period/2TA0CCTL1 = OUTMOD_6; // CCR1 toggle/setTA0CCR1 = 192; // CCR1 PWM duty cycleTA0CCTL2 = OUTMOD_6; // CCR2 toggle/setTA0CCR2 = 128; // CCR2 PWM duty cycleTA0CCTL3 = OUTMOD_6; // CCR3 toggle/setTA0CCR3 = 64; // CCR3 PWM duty cycleTA0CTL = TASSEL__ACLK + MC_3; // ACLK, up-down mode__bis_SR_register(LPM3_bits); // Enter LPM3__no_operation(); // For debugger}//***************************************************************************** *// CC430F613x Demo - RTC in Counter Mode toggles P1.0 every 1s//// This program demonstrates RTC in counter mode configured to source from ACLK// to toggle P1.0 LED every 1s.//// CC430F6137// -----------------// /|\ | |// | | |// ---|RST |// | |// | P1.0|-->LED//// M Morales// Texas Instruments Inc.// April 2009// Built with CCE Version: 3.2.2 and IAR Embedded Workbench Version: 4.11B//***************************************************************************** *#include "cc430x613x.h"void main(void){WDTCTL = WDTPW+WDTHOLD;P1OUT |= 0x01;P1DIR |= 0x01;// Setup RTC TimerRTCCTL01 = RTCTEVIE + RTCSSEL_2 + RTCTEV_0; // Counter Mode, RTC1PS, 8-bit ovf// overflow interrupt enableRTCPS0CTL = RT0PSDIV_2; // ACLK, /8, start timerRTCPS1CTL = RT1SSEL_2 + RT1PSDIV_3; // out from RT0PS, /16, start timer__bis_SR_register(LPM3_bits + GIE);}#pragma vector=RTC_VECTOR__interrupt void RTC_ISR(void){switch(__even_in_range(RTCIV,16)){case 0: break; // No interruptscase 2: break; // RTCRDYIFGcase 4: // RTCEVIFGP1OUT ^= 0x01;break;case 6: break; // RTCAIFGcase 8: break; // RT0PSIFGcase 10: break; // RT1PSIFGcase 12: break; // Reservedcase 14: break; // Reservedcase 16: break; // Reserveddefault: break;}}//***************************************************************************** *// CC430F613x Demo - Timer_A3, Toggle P1.0, CCR0 Up Mode ISR, 32kHz ACLK//// Description: Toggle P1.0 using software and the TA_1 ISR. Timer1_A is// configured for up mode, thus the timer overflows when TAR counts// to CCR0. In this example, CCR0 is loaded with 1000-1.// Toggle rate = 32768/(2*1000) = 16.384// ACLK = TACLK = 32768Hz, MCLK = SMCLK = default DCO ~1.045MHz//// CC430F6137// ---------------// /|\| |// | | |// --|RST |// | |// | P1.0|-->LED//// M Morales// Texas Instruments Inc.// April 2009// Built with CCE Version: 3.2.2 and IAR Embedded Workbench Version: 4.11B//***************************************************************************** *#include "cc430x613x.h"void main(void){WDTCTL = WDTPW + WDTHOLD; // Stop WDTP1DIR |= 0x01; // P1.0 outputTA1CCTL0 = CCIE; // CCR0 interrupt enabledTA1CCR0 = 1000-1;TA1CTL = TASSEL_1 + MC_1 + TACLR; // ACLK, upmode, clear TAR__bis_SR_register(LPM3_bits + GIE); // Enter LPM3, enable interrupts__no_operation(); // For debugger}// Timer A0 interrupt service routine#pragma vector=TIMER1_A0_VECTOR__interrupt void TIMER1_A0_ISR(void){P1OUT ^= 0x01; // Toggle P1.0}//***************************************************************************** *// CC430F613x Demo - FLL+, Runs Internal DCO at 2.45MHz with LFXT1 as Ref//// Description: This program demonstrates setting the internal DCO to run at// 2.45MHz with auto-calibration by the FLL+ circuitry. It uses LFXT1 as FLL// reference.// ACLK = LFXT1 = 32768Hz, MCLK = SMCLK = DCO = (74+1) x REFO = 2457600Hz//// CC430F6137// -----------------// /|\ | XIN|-// | | | 32kHz// ---|RST XOUT|-// | |// | P2.2 |--> MCLK = 2.45MHz// | |// | P2.0 |--> ACLK = 32kHz// | |//// M Morales// Texas Instruments Inc.// April 2009// Built with CCE v3.1 Build 3.2.3.6.4 & IAR Embedded Workbench Version: 4.11B//***************************************************************************** *#include "cc430x613x.h"void main(void){WDTCTL = WDTPW + WDTHOLD; // Stop watchdog timerP1DIR |= BIT0; // P1.0 outputPMAPPWD = 0x02D52; // Get write-access to port mapping regs P2MAP0 = PM_ACLK; // Map ACLK output to P2.0P2MAP2 = PM_MCLK; // Map MCLK output to P2.2 PMAPPWD = 0; // Lock port mapping registersP2DIR |= BIT0 + BIT2; // ACLK, MCLK, SMCLK set out to pinsP2SEL |= BIT0 + BIT2; // P2.0,2 for debugging purposes.// Initialize LFXT1P5SEL |= 0x03; // Select XT1UCSCTL6 |= XCAP_3; // Internal load cap// Loop until XT1 fault flag is cleareddo{UCSCTL7 &= ~XT1LFOFFG; // Clear XT1 fault flags}while (UCSCTL7&XT1LFOFFG); // Test XT1 fault flag// Initialize DCO to 2.45MHz__bis_SR_register(SCG0); // Disable the FLL control loopUCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx UCSCTL1 = DCORSEL_3; // Set RSELx for DCO = 4.9 MHz UCSCTL2 = FLLD_1 + 74; // Set DCO Multiplier for 2.45MHz// (N + 1) * FLLRef = Fdco// (74 + 1) * 32768 = 2.45MHz// Set FLL Div = fDCOCLK/2__bic_SR_register(SCG0); // Enable the FLL control loop// Worst-case settling time for the DCO when the DCO range bits have been// changed is n x 32 x 32 x f_MCLK / f_FLL_reference. See UCS chapter in 5xx// UG for optimization.// 32 x 32 x 2.45 MHz / 32,768 Hz = 76563 = MCLK cycles for DCO to settle__delay_cycles(76563);// Loop until XT1,XT2 & DCO fault flag is cleareddo{UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + XT1HFOFFG + DCOFFG);// Clear XT2,XT1,DCO fault flags SFRIFG1 &= ~OFIFG; // Clear fault flags}while (SFRIFG1&OFIFG); // Test oscillator fault flagwhile(1){P1OUT ^= BIT0; // Toggle P1.0__delay_cycles(600000); // Delay}}//***************************************************************************** *// CC430F613x Demo - USCI_A0, 115200 UART Echo ISR, DCO SMCLK//// Description: Echo a received character, RX ISR used. Normal mode is LPM0.// USCI_A0 RX interrupt triggers TX Echo.// Baud rate divider with 1048576hz = 1048576/115200 = ~9.1 (009h|01h)// ACLK = REFO = ~32768Hz, MCLK = SMCLK = default DCO = 32 x ACLK = 1048576Hz // See User Guide for baud rate divider table//// CC430F6137// -----------------// /|\| |// | | |// --|RST |// | |// | P2.7/UCA0TXD|------------>// | | 115200 - 8N1// | P2.6/UCA0RXD|<------------//// M Morales// Texas Instruments Inc.// April 2009// Built with CCE Version: 3.2.2 and IAR Embedded Workbench Version: 4.11B。