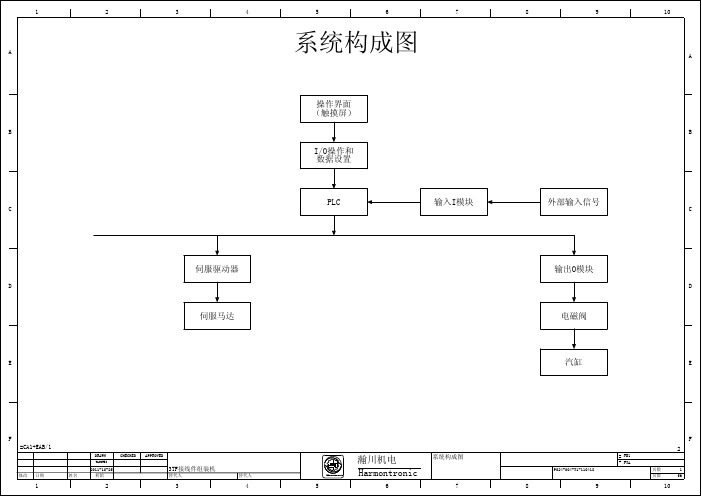
ABB机器人程序模板与接线电路
Abb机器人调试步骤

2015年 03 月 31 日实施Q/RT 20002-2004ABB 机器人调试规范武汉人天包装技术有限公司 发布前言为了培养和加强设计人员、现场安调人员对ABB机器人知识的了解和熟悉,规范安调人员对ABB机器人的调整,特编写《ABB机器人调试规范》。
本标准起草单位:人天公司电气所。
本标准主要起草人: 朱学建。
目录序言............................................................................................................................................................一、安装机器人 ........................................................................................................................................1-1 ABB机器人控制柜1-1-1控制柜的安装21-1-2控制柜的构造1-2机器人本体1-3机器人本体与控制柜的连接二、认识机器人 ........................................................................................................................................三、序列号恢复的运用 ............................................................................................................................四、ABB机器人的基础操作...................................................................................................................4-1语言设置4-2备份与恢复4-2-1备份4-2-2恢复44-3手动机器人4-4校准五、系统I/O配置及接线.........................................................................................................................六、检查信号............................................................................................................................................七、导入程序............................................................................................................................................八、工件坐标系设定 ................................................................................................................................九、校基准点 (49)十、调整参数............................................................................................................................................10-1 微调纸箱的长宽高10-2修改已经码放的纸箱数量710-3微调抓取位置10-4微调码垛摆放位置十一、手动调试 ........................................................................................................................................十二、自动运行 ........................................................................................................................................十三、注意事项 ........................................................................................................................................序言本手册主要针对ABB关节机器人在码垛生产线运用的调试。
ABB机器人IRC5C控制器电路图
1
2
3
4
5
6
7
8
Table of contents
Plant Location Page 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 Page description COPYRIGHT TITLE PAGE Table of contents: Table of contents: REVISION INFORMATION Front View Top View Side View BLOCK DIAGRAM MAIN POWER INPUT POWER SUPPLY DSQC 661 AND 662 EMERGENCY STOP RUN CHAIN OPERATING SAFETY STOP POWER UNIT RUN CHAIN EXT OPERATING MODE SELECTOR, 2MODES FPU, FLEXPENDANT Main Computer/AnybusCC/RS232 Exp./Interface Board/ MAIN COMPUTER A31 DSQC1000 MAIN COMPUTER A31 DSQC1000 ; A32 DSQC1003 FIELDBUS ADAPTER A32: DEVICENET A31.2 m/s DSQC1006 DIGITAL I/O UNIT INPUT DIGITAL I/O UNIT OUTPUT DIGITAL PART OF COMBI I/O AND DIGITAL I/O UNIT DSQC652 COMBI I/O UNIT DSQC651 RELAY I/O UNIT DSQC653 RELAY I/O UNIT DSQC653 REMOTE I/O UNIT DSQC350A Page supplementary field Date 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014
ABB机器人主伺服接线

1.a 1.b 12014/2/15liang.V1机器人/PLC/图纸说明增补说明:奇瑞捷豹路虎汽车有限公司
创建日期:2014/2/15审核日期:liang 审核人:CJLR焊装设备跟踪学习汇总2014/2/12 创建者 :
LIANG 更改日期:当前号: 上页: 下页: 图号: ABB机器人内部硬件结构(伺服驱动)总页数: 1701020304050607080910111213141516171819
电容存储器G3
四轴电机接线X14五轴电机接线X15接限流电阻六轴电机X16
主伺服给电+24V电源
+24V电源(给附加轴)
接附加轴X9处
与轴计算机通讯三轴电机X13
二轴电机X12
直流母线一轴电机X11接外轴伺服与主伺服通讯(A41.1.X8)+24V电源(来自主伺服处)
主伺服驱动模块主伺服上点得K42/K43吸合才能得电,靠F1空开控制
根据电机功率的不同,1、2、3轴电机从
主伺服端口出去六根线,4、5、6轴则三根线。
来自电源功率板电压
来自电源功率板电压与附加轴驱动模块以太网通讯
M7为行走轴M8为固定焊钳主伺服驱动模块
伺服轴放大图F1空开
(行走轴加焊钳)。
ABB机器人程序模板与接线电路
ABB机器人程序模板与接线电路一、引言随着工业自动化的快速发展,ABB机器人作为行业领导者,其编程与接线技术对于实现自动化生产具有重要意义。
本文将详细介绍ABB机器人的程序模板及其接线电路,帮助读者更好地掌握这一关键技术。
二、ABB机器人程序模板1、程序结构ABB机器人的程序结构以模块化为基础,主要由以下部分组成:初始化模块、运动模块、输入输出模块、通讯模块、数据处理模块和异常处理模块。
这些模块通过函数的形式相互调用,形成完整的程序。
2、常用指令在ABB机器人程序中,常用的指令包括:运动指令,如MOV、PTP、LIN、JMP等,用于控制机器人的移动;逻辑控制指令,如IF、ELSE、ENDIF等,用于实现条件判断和逻辑控制;还有输入输出指令、通讯指令、数据处理指令等。
三、ABB机器人接线电路1、电源电路ABB机器人的电源电路主要由电源模块、断路器和电源线等组成。
其中,电源模块为机器人提供稳定的工作电压,断路器负责保护电路安全,电源线负责传输电力。
2、信号线连接ABB机器人的信号线主要分为输入信号线和输出信号线。
输入信号线连接外部传感器、按钮等设备,为机器人提供运行指令和状态信息;输出信号线连接机器人与外部设备,传递控制信号和状态信息。
3、网络连接ABB机器人可以通过以太网或Profinet IO协议与其他设备进行通信。
网络连接需要使用合适的网线和水晶头,按照网络配置进行连接。
四、编程与接线实例以一个简单的ABB机器人生产线应用为例,介绍如何结合程序模板和接线电路实现自动化生产。
该应用包括一个搬运机器人和一个加工机器人。
搬运机器人负责将工件搬运到加工机器人的工作区域;加工机器人对工件进行加工,然后将成品放置到指定区域。
根据应用需求,编写搬运机器人和加工机器人的程序模板。
在程序中定义好输入输出接口和通讯协议。
然后,根据接线图连接电源电路和信号线。
在搬运机器人的程序中,设置好搬运路径和目标位置的传感器接口;在加工机器人的程序中,设置好加工工具的接口和成品放置区域的传感器接口。
ABB机器人电气图

DC 24V
0
00
00
00
00
00
00
0
1
11
11
11
11
11
11
1
2
22
22
22
22
22
22
2
3
33
33
33
33
33
33
3
4
44
44
44
44
44
44
4
5
55
55
55
55
55
55
5D
6
66
66
66
66
66
66
6
7
77
77
77
77
77
77
7
321-1BL00-0AA0
321-1BL00-0AA0
321-1BL00-0AA0
6
主电源 7
D
-J4
-J5
-M7
L
N
E -M8
L
N
控制柜排风电源
P024-004-T1-110418
= FB1 + FT1
F 2
页数
1.a
页数
56
8
9
10
1
2
3
A
B 2.2 / L
2.2 / N
2.2 / L 2.2 / N C
2.2 / L 2.2 / N
D
2.2 / L
2.2 / N
+
-
SSR4
1
2
3
4
5
6
7
8
9
abb acs550 接线安装图
25 RO3C 26 RO3A 27 RO3B
继电输出 3, 可编程。默认 2 = 故障
最大 : 250 VAC / 30 VDC, 2 A 最小 : 500 mW (12 V, 10 mA)
继电器输出
7 4
IP2001
X0005 X0006
IP2003
用导线槽接线
1. 在导线槽 / 接线盒上选择合适的进线孔。 ( 参 见上面的 " 导线槽 / 接线盒 " 部分。)
2. 安装薄壁型的导线卡 ( 不在供货范围内 )。
3. 安装电线槽 / 接线盒。 4. 连接导线箍头到接线盒上。
2
X0007
3
X0005
参见 “电源电缆的连接” 21 页。 7. 连接已绕成辫状线的电机电缆屏蔽层。 8. 安装接线槽 / 接线盒拧紧电缆卡。
9. 安装控制电缆用的电缆卡 ( 进线 / 电机电缆和 卡子未在本图显示 )。
10. 剥开控制电缆屏蔽层,将铜屏蔽层绕成辫状 线。
11. 控制电缆走线穿过线卡子并拧紧卡子。 12. 将辫状屏蔽层连接 X1-1 上的 I/O 专用屏蔽端
5. 输入电源电缆和电机电缆的走线穿过导线槽。
7
6. 剥开接线。பைடு நூலகம்
7. 连接电源电缆、电机电缆 , 接地线必须连至指
7
定的变频器端子上。参见“电源电缆的连接”
21 页。
5
4
IP2004
8. 控制电缆穿过导线槽。
9. 剥开控制电缆的屏蔽层,将铜屏蔽层绕成辫
状。
10
10. 将辫状屏蔽层连接 X1-1 上的 I/O 专用屏蔽端
(ABB)电路图

-A3
允许抓方料 9
允许抓圆料 10
装配区定位完成 11
允许机器人放毛胚 12
入库编码一 13
入库编码二 14
入库编码三 15
入库编码四 16
/22.2
Q3.0
Q3.1
Q3.2
Q3.3
Q3.4
Q3.5
Q3.6
Q3.7
L+
M
SIEMENS S7-1200
/22.4
/22.4
/22.4
/22.4
/22.4
0
1
2
3
4
5
6
7
8
9
IΔ
PE:1
2
1
4
3
32A 2P
总漏电保护器
-Q11
L10 N10 2.5 mm² 2.5 mm²
L1
N1
2.5 mm² 2.5 mm²
PE 2.5 mm²
L1 2.5 mm²
N1 2.5 mm²
13
-Q2
20A 2P 机器人控制柜电源
I> I>
24
L20 N20 2.5 mm² 2.5 mm²
28
I2.6 0.5 mm²
29
I2.7 0.5 mm²
-A2
/21.2 SIEMENS S7-1200
1库检测 1
2库检测 2
3库检测 3
4库检测 4
5库检测 5
6库检测 6
7库检测 7
8库检测 8
I2.0
I2.1
I2.2
I2.3
I2.4
I2.5
I2.6
I2.7
2M
/21.4
Abb机器人调试步骤

Q/RT 20002-20042015年 03 月 31 日实施ABB机器人调试规范武汉人天包装技术有限公司发布前言为了培养和加强设计人员、现场安调人员对ABB机器人知识的了解和熟悉,规范安调人员对ABB机器人的调整,特编写《ABB机器人调试规范》。
本标准起草单位:人天公司电气所。
本标准主要起草人: 朱学建。
目录序言.................................................................一、安装机器人.......................................................1-1 ABB机器人控制柜..............................................1-1-1控制柜的安装 (4)1-1-2控制柜的构造................................................1-2机器人本体....................................................1-3机器人本体与控制柜的连接......................................二、认识机器人.......................................................三、序列号恢复的运用.................................................四、ABB机器人的基础操作.............................................4-1语言设置......................................................4-2备份与恢复....................................................4-2-1备份........................................................4-2-2恢复 (9)4-3手动机器人....................................................4-4校准..........................................................五、系统I/O配置及接线...............................................六、检查信号.........................................................七、导入程序.........................................................八、工件坐标系设定...................................................九、校基准点 (49)十、调整参数.........................................................10-1 微调纸箱的长宽高............................................10-2修改已经码放的纸箱数量 (16)10-3微调抓取位置.................................................10-4微调码垛摆放位置............................................. 十一、手动调试.......................................................十二、自动运行.......................................................十三、注意事项.......................................................序言本手册主要针对ABB关节机器人在码垛生产线运用的调试。
ABB 机器人DSQC652板外部IO接线
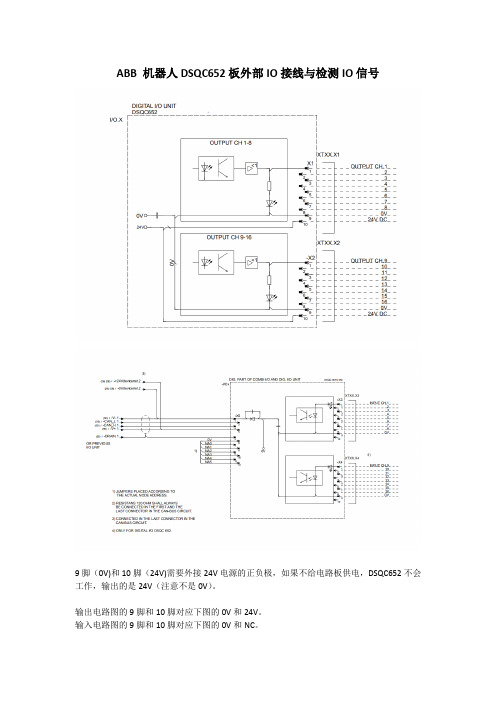
ABB 机器人DSQC652板外部IO接线与检测IO信号
9脚(0V)和10脚(24V)需要外接24V电源的正负极,如果不给电路板供电,DSQC652不会工作,输出的是24V(注意不是0V)。
输出电路图的9脚和10脚对应下图的0V和24V。
输入电路图的9脚和10脚对应下图的0V和NC。
上图圈出来胡区域是24V直流电源和DSQC652外部接线端。
1: 24V 2: 0V
3: DSQC652板输出的9脚(0V) 4: DSQC652板输出的10脚(24V) 5: DSQC652板输入的9脚(0V) 6:未连接有线
使用机器人电控箱电源需要使用输入输出时:
使用输出时:输出的是24V,2(0V)和3(0V)连接,1(24V)和4(24V)连接,用电器一端接输出、另一端接0V;
使用输入时:输入属于共0V,2(0V)、3(0V)和5(0V)连接,1(24V)和4(24V)连接,开关一端接输入、另一端接24V;
IO信号检测方法如下:
在ABB菜单里打开“输入输出”,点击“视图”,选择“数字输出”,点击任意一个输出信号,把值改为1即强制输出为1,可用万用表检测到输出。
选择“数字输入”可检测输入信号,外部接线,一端接输入,另一端接24V,可用万用表检测。
ABB机器人电气图
A B C D E FABCDEF 线材模块送线皮带剥线送线切刀到剥线位夹爪至剥线位置切刀上升切刀剥线下降切刀上升分料气缸动作前段轨道前段拨爪动作分料气缸复位前段轨道产品平移缸动作前段拨爪复位送线皮带裁切送线夹线夹爪加紧夹爪下降夹螺钉放螺钉工站夹爪上升夹爪平移缸动作夹爪下降夹爪松螺钉翻转气缸动作翻转工站拉料气缸动作翻转气缸复位焊接工站后端端子定位气缸动作按复位找原点马达回到原始位置气缸是否复位完成否查看触摸屏报提示处理相关故障是电源、气源是否正常是否电源、气源是否打开或欠压启 动切刀裁线切刀上升送线皮带剥皮后退夹爪剥线后退铆压机铆压旋转盘转到铆压位夹爪张开旋转到初始位置前段轨道产品平移缸复位拉料气缸复位后端端子定位气缸复位夹爪上升夹爪平移缸复位2 3.aA B C D E FABCDEF说明牌工站拧螺钉工站产品定位缸动作螺丝刀升降气缸下降气动螺丝刀启动按复位找原点马达回到原始位置气缸是否复位完成否查看触摸屏报提示处理相关故障是电源、气源是否正常是否电源、气源是否打开或欠压启 动气动螺丝刀关闭螺丝刀升降气缸复位产品定位气缸复位轨道错位气缸后退说明牌错位气缸动作产品定位气缸下降说明牌到位气缸动作说明牌铆点气缸动作说明牌到位气缸复位说明牌铆点气缸复位产品定位气缸复位说明牌错位气缸复位轨道错位气缸复位3+FT1/15.a6AB CDE FABCDEF CPU315 2DP SM321DI32×24V SM321DI32×24V SM321DI32×24V SM322DO32×24V ,0.5A SM322DO32×24V,0.5ACPU226EM253EM253EM253EM253MP277 8' TOUCHMPI-BusPS3072A。
ABB机器人主伺服接线

ABB主伺服接线ABB主伺服接线范本1. 引言本文档旨在提供ABB主伺服接线的详细指南,以确保正确连接和运行系统。
它包括了适用于主伺服接线的各个方面的详细信息。
请确保在进行接线之前仔细阅读整个文档,并按照所述步骤和注意事项进行操作。
2. 准备工作在进行ABB主伺服接线之前,请完成以下准备工作:2.1 确定所使用的ABB型号和控制柜型号。
2.2 获取正确的接线图和相关的技术文档。
2.3 确保具备必要的工具和安全设备。
3. 接线步骤以下是ABB主伺服接线的具体步骤:3.1 确定主伺服电源的电压要求并断开电源。
3.2 检查和控制柜的接线端子,并确保其干净和无杂质。
3.3 根据提供的接线图,将电缆连接到相应的端子上。
3.4 仔细检查每个接线点,确保连接正确且紧固。
3.5 根据和控制柜的法规要求,进行接地连接。
3.6 重新连接主伺服电源并根据接线图正确设置电源开关。
3.7 使用万用表检查各个接线点和电源的电压,确保连接正确并稳定。
4. 完成接线后的注意事项一旦完成ABB主伺服接线,请注意以下事项:4.1 进行全面的接线检查,确保所有接线牢固且正确连接。
4.2 执行相关的和控制柜的测试程序,以验证接线的正确性。
4.3 监视主伺服系统的运行,确保其正常工作且没有异常情况发生。
4.4 对于任何接线问题或异常现象,请立即断开电源,并寻求专业人员的帮助解决。
5. 附件本文档涉及的附件包括:5.1 ABB型号和控制柜型号说明书。
5.2 主伺服接线图和相关技术文档。
5.3 安全操作手册和注意事项。
6. 法律名词及注释以下是本文档中涉及的法律名词及其注释:- 接地连接:指将设备或系统与地面接触,以确保电气设备的安全和电气连接的完整性。
7. 结束语本文档提供了ABB主伺服接线的详细指南,以确保正确连接和运行系统。
请务必遵循本文档中的步骤和注意事项,以确保安全和可靠的操作。
如有任何问题或需要进一步的支持,请咨询相关专业人员。
ABB机器人IO配置及接线,很详细!收藏了!

ABB机器人IO配置及接线,很详细!收藏了!ABB机器人IO基本操作和接线练习说明:这里对ABB工业机器人的IO进行基本操作,机器人输入输出接线,做简单接线说明和对应操作。
基本操作包括设定为常用IO 信号,信号查看方式,信号的强制仿真,输出信号的强制输出,机器人辅助按键关联,IO接线图等。
一、设定IO信号为常用信号操作1、设定说明这里把已经建立的IO信号设定为常用信号,主要是为了方便我们在示教器输入输出中查看信号和对信号进行各种操作。
机器人断电重启以后一般会在输入输出中显示常用IO信号,手动自动状态人不干预情况下都可以显示默认状态显示的常用IO信号。
2、设定步骤(1)ABB菜单——>控制面板——>常用IO配置——>进行配置常用IO信号并应用确认,之后再在ABB菜单——>输入输出中查看——>默认查看常用信号。
(2)具体操作图片A:ABB菜单——>控制面板B:控制面板——>常用IO配置C:进行配置常用IO信号并应用确认D:在ABB菜单——>输入中查看——>默认查看常用信号D:默认查看常用信号画面二、信号查看方式1、查看路劲在ABB菜单——>输入中查看——>默认查看常用信号,一般设定常用信号以后,第一次查看信号都是看到默认设定的信号,如果开始没设定常用IO信号,则开始进去是不显示信号,直到点击右下角视图的查看方式以后才会显示对应的信号选项。
这里还有2、查看方式(1)进入常用信号画面:系统默认常用信号(2)信号查看方式:视图中按照需要查看类型选项选择(3)按信号IO设备查看图1:图2:(4)按照信号的名称、类别设置查看信号三、信号的强制仿真1、输入信号的仿真功能操作(1)仿真功能介绍ABB机器人(其他工业机器人同)的仿真功能,是对建立好的IO 信号进行虚拟仿真,可以设定对应信号为需要的设定值,但是这些信号处于仿真状态时候,设定的输出信号值对外部真实设备无效,或者输入信号不是外部真实信号有输入,信号仿真就是对信号的虚拟状态,仅仅在机器人系统编程中起作用,不对真实设备起作用,所以称为信号的仿真功能。
ABB安全回路(急停和停止)接线 1.1

ABB控制柜内安全板接线图
ABB机器人控制柜有四个独立的安全保护机制,分别为:GS(常规停止)、AS(自动停止)、SS(上级停止)、ES(紧急停止)。
以下是标准控制柜安全回路的接线。
安全板接口如下图1所示:主要有4个端子排,由上到下分别为X5、X6、X1、X2。
4个端子排上面出厂默认装有短接片,根据实际需要跳接对应的短接片。
X5
X6
X1
X2
图1
X1、X2 用于紧急停止回路;
X5 用于常规停止、自动停止回路;
X6 用于上级停止回路。
1、急停回路ES1接X1上面3和4、ES2接X2上的3和4,ES1和ES2的另外一
端分别接在急停按钮的常闭触点上。
X1、X2端子排出厂短接如下图2:
图2
2、自动停止回路AS1和AS2只在自动模式下有效,一般常用于安全门、安全
光栅停止。
AS1和AS2分别接入X5上面的5和6、11和12,另一端分别接入安全门常闭触点。
要同时断开和同时恢复。
X5端子排出厂短接如下图3:
图3
3、上级停止SS1和SS2分别接入X6上面的4和6、1和3,另一端分别接入安
全门常闭触点即可。
X6端子排出厂短接如下图3:。
【2024版】ABB-机器人DSQC652板外部IO接线

可编辑修改精选全文完整版
ABB 机器人DSQC652板外部IO接线与检测IO信号
9脚(0V)和10脚(24V)需要外接24V电源的正负极,如果不给电路板供电,DSQC652不会工作,输出的是24V(注意不是0V)。
输出电路图的9脚和10脚对应下图的0V和24V。
输入电路图的9脚和10脚对应下图的0V和NC。
上图圈出来胡区域是24V直流电源和DSQC652外部接线端。
1: 24V 2: 0V
3: DSQC652板输出的9脚(0V) 4: DSQC652板输出的10脚(24V) 5: DSQC652板输入的9脚(0V) 6:未连接有线
使用机器人电控箱电源需要使用输入输出时:
使用输出时:输出的是24V,2(0V)和3(0V)连接,1(24V)和4(24V)连接,用电器一端接输出、另一端接0V;
使用输入时:输入属于共0V,2(0V)、3(0V)和5(0V)连接,1(24V)和4(24V)连接,开关一端接输入、另一端接24V;
IO信号检测方法如下:
在ABB菜单里打开“输入输出”,点击“视图”,选择“数字输出”,点击任意一个输出信号,把值改为1即强制输出为1,可用万用表检测到输出。
选择“数字输入”可检测输入信号,外部接线,一端接输入,另一端接24V,可用万用表检测。
ABB机器人控制器电路图
ABB控制器电路图正文:一:引言ABB控制器是一种专门用于控制ABB的设备,通过该控制器可以实现的运动、操作和控制。
本文档将详细介绍ABB控制器的电路图,包括各个电路部分的功能和连接方式。
二:控制器主要部件1. 电源部分:控制器需要接入电源供电,电源部分包括电源开关、保险丝等组成。
电源部分需要确保电压稳定、电流充足,以保证控制器正常运行。
2. 通信部分:控制器需要与外部设备进行通信,通信部分包括以太网接口、串口等。
通过通信部分,可以实现与上位机的数据交互,以及与其他设备的联动控制。
3. 控制部分:控制器的核心是控制部分,主要由处理器、存储器、控制芯片等组成。
控制部分负责执行程序,并实时控制的运动。
4. 输入输出接口:控制器还包括与外部设备进行输入输出的接口,如数字输入接口、模拟输出接口等。
通过这些接口,可以实现对外部信号的采集和输出控制。
三:电路图细节1. 电源部分电路图:电源部分包括电源开关、保险丝、电源滤波器、电源变压器等。
电源开关用于控制电源的开关,保险丝用于保护电路免受过电流的损害。
电源滤波器用于去除电源中的杂波,保证电源信号的稳定性。
电源变压器用于将输入的交流电转换为控制器需要的直流电。
2. 通信部分电路图:通信部分包括以太网接口、串口、通信模块等。
以太网接口用于连接控制器与上位机或其他设备进行数据传输。
串口用于与其他设备进行直接的串行通信。
通信模块用于支持无线通信,如蓝牙、Wi-Fi等。
3. 控制部分电路图:控制部分电路图包括处理器、存储器、控制芯片等。
处理器是控制器的核心部件,负责执行程序和实时控制的运动。
存储器用于存储程序和数据,包括闪存和RAM。
控制芯片用于控制电机和传感器等外部设备。
4. 输入输出接口电路图:输入输出接口包括数字输入接口、模拟输出接口等。
数字输入接口用于采集外部设备的数字信号,如开关、按键等。
模拟输出接口用于控制外部设备的模拟信号,如电机的转速、位置控制等。
附件:本文档涉及的附件详见附件文件。
ABB机器人外部启动配置说明(参考模板)
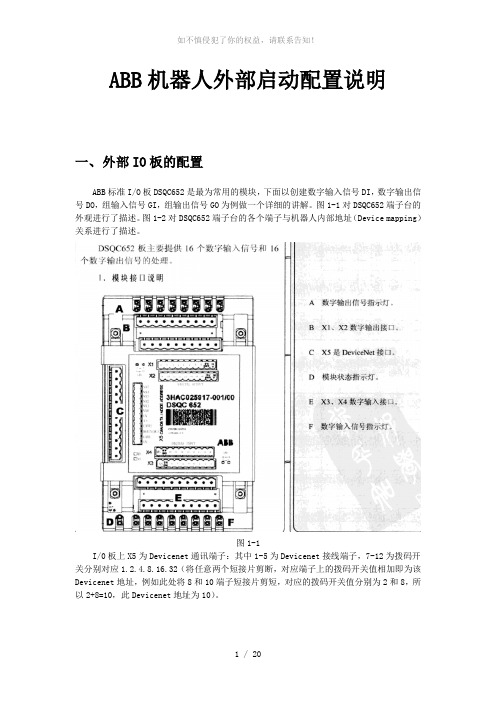
ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet 现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1参数名称设定值说明Name d652 设定IO板在系统中的名字Address 10 设定IO板在总线中的地址来自模板的值DSQC 652 24 VDC I/O Device 选择DeviceNet设备单击【ABB菜单】【控制面板】【配置】【DeviceNet Device】【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】【控制面板】【配置】【Signal】【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1参数名称设定值说明Name DI1 设定数字输入信号的名字Type of Signal Digital Input 设定信号的类型Assigned to Device DSQC 652 24 VDC I/O Device 设定信号所在的IO模块Device Mapping 1 设定信号所占用的地址Invert Physical Value NO 如果想将信号取反,可选Yes图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
ABB机器人程序模板与接线电路

ABB机器人程序模板与接线电路————————————————————————————————作者:————————————————————————————————日期:23 ABB 程序模板与接线电路百度文库中有很多程序模版,以及I/O 通讯资料。
在这里我将对,程序如何输入在示教器中,以及I/O 通讯口硬件接线做详细的说明供大家参考。
一、机器人当前位置检测例行程序以上程序中CurrentPos(phome ,tGun),大家在ABB 培训资料中,ABB 程序模版中,经常遇到。
其主要功能是避免机器人自动返回Home 点过程中发生碰撞。
例行功能程序,能有效检测机器人TCP 当前位置是否在Home 点,并手动返回Home 点。
检测TCP 当前位置是否必要?能否不检测直接运行?很多程序的编写中,确实没有使用此模块。
加以替代的是下面的程序,在机械手臂开始运行的时候,直接使TCP 回到Home 点,然后自动运行。
若TCP 当前位置在Home 点附近,则机器手臂移动范围小,不会发生碰撞现象。
使用检测程序,一般配合手动返回Home 点。
下面详细介绍CurrentPos(phome ,tool0)语句在示教器中的编写过程。
本试例以模版中的检测当前位置程序为例编写。
模版程序如下所示:41、 打开程序编辑器,例行程序—文件—新建例行程序 2按右图格式,输入各参数(名称可以随便) 3只有例行功能程序,才含有数据类型。
4接下来进行参数设置(点击参数右边的…) 点击添加—添加参数param0在添加一个param1 选中param0修改名称为ComparePos ,数据类型robtarget 模式选择IN(输入),维数选择0。
接下来设置param1个参数设置如下图按步骤设置完成后,点击确定 在返回的页面中点击结果… 出现了什么?下面介绍检测当前位置例行功能程序怎么编写:首先添加一个数据类型为num的Counter。
和一个数据类型为robtarget的ActualPos。
ABBIO板卡(1030模块)接线配置

ABBIO板卡(1030模块)接线配置
ABB 1030模块接线配置
ABB机器人的DSQC1030模块使用越来越广泛,关于DSQC1030做如下介绍。
1、该硬件使用EtherNetIP协议,机器人不需要添加额外选项。
出厂默认用网线把模块底部X5网口和控制柜上X4 LAN2口连接。
2、模块最上端的X4为24V电源,默认已经从XT31引过来。
X1为输出,其中PWR DO和GND DO为DO的24V和0V,需要单独接电(也可从XT31引线)。
X2为输入,其中GND DI为DI的0V,需要单独接线(也可从XT31引线)。
3、第一次开机后,系统会自动识别硬件,给出提示信息:
4、根据提示配置,完成配置后就自动分配16di和16do。
5、若开机时错过配置提示信息,也可进入控制面板-配置-EtherNetIP Device,添加模板选择ABB LOCAL I/O,地址192.168.125.100
6、然后再添加signal,方法和之前类似,所属设备选Local IO
以上就是关于ABB机器人DSQC1030模块的相关介绍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB程序模板与接线电路
百度文库中有很多程序模版,以及I/O通讯资料。
在这里我将对,程序如何输入在示教器中,以及I/O通讯口硬件接线做详细的说明供大家参考。
一、机器人当前位置检测例行程序
以上程序中CurrentPos(phome,tGun),大家在ABB培训资料中,ABB程序模版中,经常遇到。
其主要功能是避免机器人自动返回Home点过程中发生碰撞。
例行功能程序,能有效检测机器人TCP当前位置是否在Home点,并手动返回Home点。
检测TCP当前位置是否必要能否不检测直接运行
很多程序的编写中,确实没有使用此模块。
加以替代的是下面的程序,在机械手臂开始运行的时候,直接使TCP回到Home 点,然后自动运行。
若TCP当前位置在Home点附近,则机器手臂移动范围小,不会发生碰撞现象。
使用检测程序,一般配合手动返回Home点。
下面详细介绍CurrentPos(phome,tool0)语句在示教器中的编写过程。
本试例以模版中的检测当前位置程序为例编写。
模版程序如下所示:
1、打开程序编辑器,例行程序—文件—新建例行程序
2按右图格式,输入各参数(名称可以随便)
3只有例行功能程序,才含有数据类型。
4接下来进行参数设置(点击参数右边的…)
点击添加—添加参数param0在添加一个param1
选中param0修改名称为ComparePos,数据类型robtarget
模式选择IN(输入),维数选择0。
接下来设置param1个参数设置如下图
按步骤设置完成后,点击确定
在返回的页面中点击结果…
出现了什么
下面介绍检测当前位置例行功能程序怎么编写:
首先添加一个数据类型为num的Counter。
和一个数据类型为robtarget的ActualPos。
1、添加指令—选择:=如右图所示
选中Counter,然后点击编辑—全部
把右边的<EXP>换成数字0
(这个是不是太低级了,下面不在配图说明了)
2、点击添加指令—选择:=
更改数据类型…—选择数据robtarget—确定
选择出来的ActualPos—点击<EXP>—点击功能
选择CRobt()
3、点击添加指令—选择Compact IF—点击取消
点击<EXP>—点击编辑—点击全部
输入AND 其他输入不在介绍了,参看前面的程序自己输
入。
CRobt是自带功能函数,作用是读取机器人当前的robtarget ,什么的你看下图数据就明白了
输入RETURN Counter=7完成编写。
使用和其他程序一样,使用ProcCall语句调用。
完成模版程序编写并测试。
当启动时TCP在Home点,则正常运行,如下图所示:
当TCP不在Home点运行时。
则显示手动执行aHOME(手动返回到Home点)。
小编太懒,就写了一句TPWrite。
对检测当前位置是否在等待位置的介绍就到这里。
二、机器人I/O口模块
由于各接口模块功能相似,现以DSQC652为例。
DSQC651的图片我就不上传了,网上有很多。
关于I/O在示教器中的编写,以及右边的board10这些网上有很多,我就不在讲述了。
数字输入输出信号如下图所是:图中:缺少24V接线。
实际使用中,输出(output)必须要0V、24V都接。
ABB的I/O输入和输出都是高电平,所以可以选择PNP常开型传感器。
可与西门子系列PLC、三菱FX3以上系类PLC直接交换信号。
信捷PLC需要中间继电器(替代按钮作用)。
关于PLC什么漏型,源型什么的。
选用时注意输入信号是高电平还是低电平。
以免使用中间继电器使电路复杂化。
关于I/O,如何关联电机启动,自动手动,请查阅ABB相关培训资料。
或私信邮箱免费索取资料。
本文档,仅作为新手学习使用,不懂之处。
还请查阅其他相关文档。
ABB机器人新系统的IO设置,供大家学习。
(刻意留白)
如何配置系统的信号1.点击屏幕左上角黄圈范围。
2.点击控制面板。
3.点击配置
4.双击DeviceNet Device
5.点击添加:
6.点击默认:
7.会出现下拉菜单,根据硬件的型号选择对应的装置。
8.在name 栏可以修改名称,不能以数字开头,推荐用Board 开头,后面加以板卡的地址。
9.在Address 中将数字改为硬件跳线的地址。
10.将地址修改后,按确定。
不要重启机器人
11.设置信号,点击Signal
12.点击添加
13.在 Name 中添加信号名称,不能以数字开头,在type ofsignal 中选择信号类型,分别有
在Assigned to Device 中选择需要配置的IO 板,点击即可
14.在Access Level 中选择使用等级,其中Default 是默认的,如果是输出信号,可以手动设定信号,ReadOnly 只能在程序中运行设定,不允许手动设定,这个在world zone 功能中要用到,All 在手动或自动情况下都可以通过IO 界面设定,这种情况不建议使用,目前只在SDK 中用到。
15.在Device Mapping 中设定信号的地址,1 号信号为对应的是0,2 号信号位对应的是1,依次类推。
16.在invert physical value 中如果是正常情况默认为No,如果需要信号反置时,选Yes.
17.重新启动机器人,信号配置即可生效。