改进的基于RSSI差值的定位算法
基于RSSI测距定位算法的研究和改进

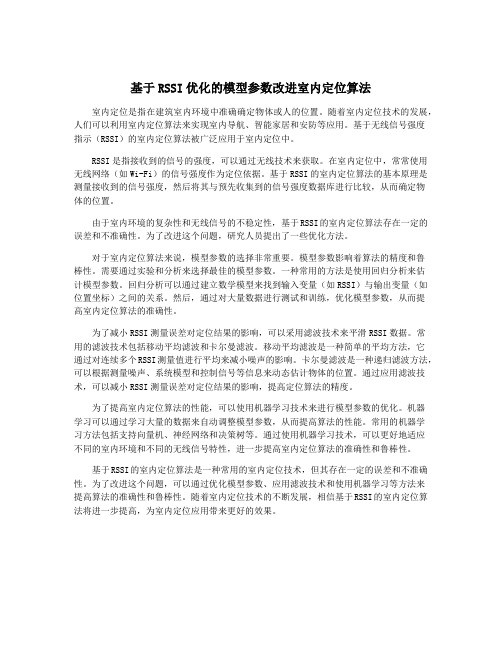
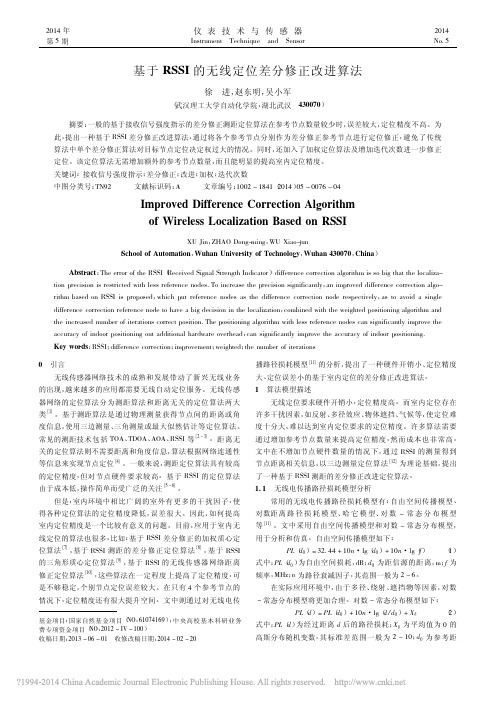
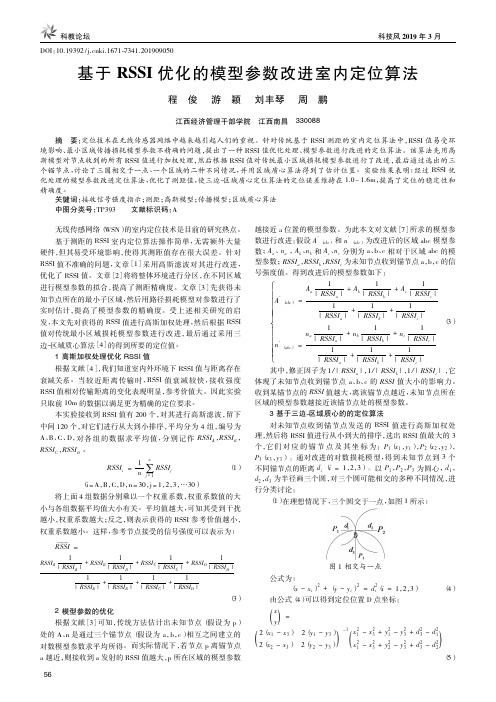
图1 应用不同环境参数的定位误差示意图
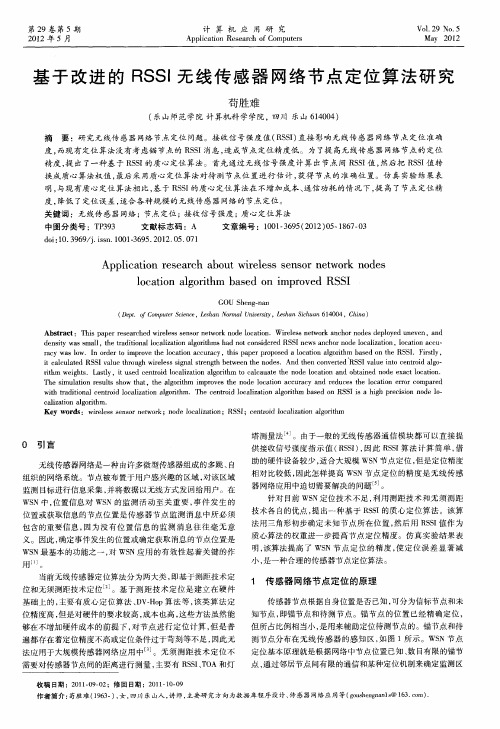
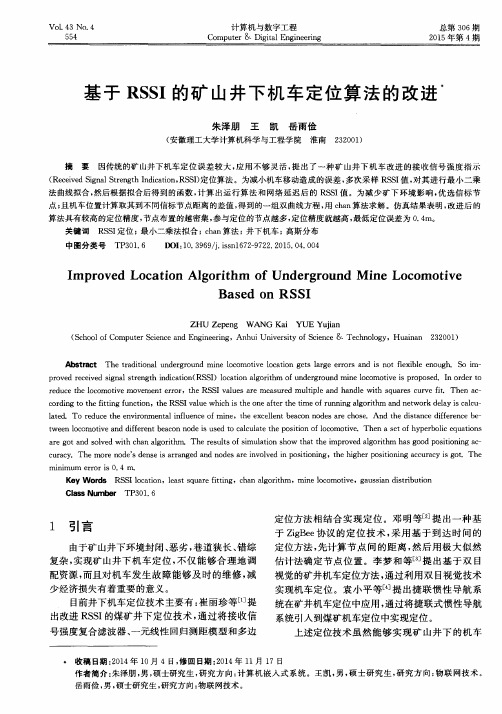
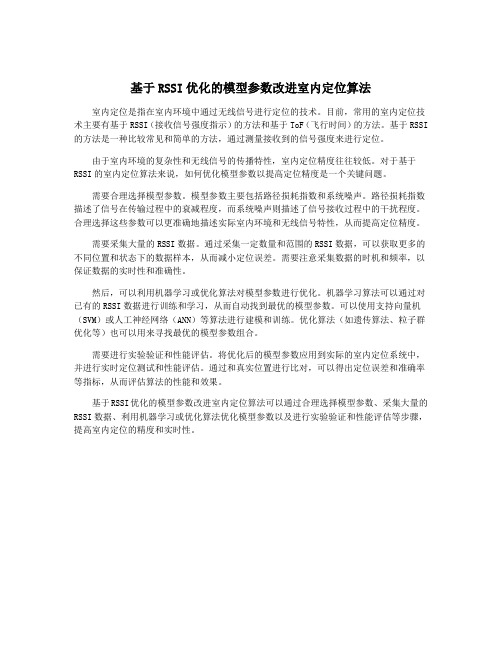
图2 子区域分割示意图
收稿日期:2017-08-18 作者简介:何沃林(1974 —),男,广东东莞人,硕士,高级工程师,研究方向:电子技术应用开发。
134
数字技术 与应用
算法分析
割的示意图。 在具体运用时,需结合室内整体布局,对子区域的分割方案予
以合理设计,尽量减少由障碍物导致的影响。在通信距离方面只需 保持在临界距离以内,不需要对子区域进行完全相等的划分。在分 割区域以后,在拟合环境参数时,以各子区域作为操作环境,最终获 得的环境参数和子区域相符。
测量时,要将参考节点设定为圆心,在半径为1米的圆周之上,有多
个参考节点平均分布,随后对圆周之上全部参考节点的RSSI值进行
测量,并进行平均值求取,具体参见如下公式(1)。
A
1
N
(RSSI )
N i1
(1)
n为传播损耗系数,环境因素的影响很大,属于一种需重点修正
的参数。由于参考节点位置坐标已知,通过和附近的参考节点测距
由此可认识到,定位精确度很大程度上会因为微小的环境参数 变化而受到影响。从室内环境来看,障碍物会把室内空间分隔成多 个相对独立的子区域,使用单一的环境参数无法适用于整体区域。
1.3 信号干扰 (1)突发干扰。测量RSSI值时,不论是环境的突然改变、还是人 员走动等,均会对此产生突发干扰。因为突发干扰的存在,对RSSI值 产生了显著影响,且比障碍物存在于信道时的影响程度明显更高。 (2)随机干扰。信号在传播过程中受到信号反射、衍射以及测量 节点内部噪声和量化噪声等因素的影响,使得节点测量获得的RSSI 数值产生随机误差[2]。在RSSI测量进程中,随机干扰持续存在,使测 量值不断波动,而且因为无规则变化,使得其数值的正负、大小等无 法被预测[2]。 (3)噪声干扰。RSSI值测量的整体进程均会受到噪声影响,使得 最终获得的是噪声和测量值混合后的数据[3]。对比随机干扰导致的 RSSI数值波动,噪声干扰之下的数值波动显然更强,而导致较大脉 冲的出现,数据变化更无规律可循[3]。
无线传感器网络中基于RSSI差值的改进定位算法

在低 功率 高密度 无 线 设 备 组 成 的 网络 中, 由于 同
步 的原 因 , 使得 T OA 往 往 比较 难 实 现 . 多 径 和 噪 D 而
差为d r 的零 均值 正态 分 布随 机变 量 , L R ) P ( 。 为对应 R 。 处 节点 的接 收信 号强 度值 .
应信 标节 点 库 , 而 对 不 同位 置 范 围 的 待测 节 点 优 化 选 取 其 定 位 采 用 的 信 标 节 点 , 继 最后 将 由未 知 节 点 接 收 到 的信 号 强 度 得 到 的多 用 户 间 的距 离 进 行 差值 , 化 求 解 非 线 性方 程组 , 高 算 法 性 能 . 真 结 果 表 明 , 文 中 的 R S WS 差 值 定 位 优 提 仿 本 SI N 算 法 比传 统 的 RS I 位 算 法 拥 有 更 好 的定 位 性 能 . S定
径, 很难 精 确 的进 行 TOA 或 T DOA 估 计 . 在 R 而 A—
D 【 ,p t 5等 许 多 项 目 中使 用 到 的 R S 技 AR 4 S oON[ ] ] SI 术 , 需设 备简单 , 一种低 功 率 、 成本 的测距 技术. 所 是 低
1 2 多用 户 R S 差 值 定 位 算 法 . SI
20 年 5 08 月
无 线传 感器 网络 中基 于 R S 差 值 的 改进 定 位 算 法 SI
徐 燕 , 江 宏 , 晓 芳 石 吴
( 门 大 学 信 息 科 学 与技 术 学 院 , 建 厦 门 3 1 0 ) 厦 福 60 5
、
摘要: 无线传感器网络( N 的许多应用都需要知道节点的位置, WS ) 在某些环境下还需要获得节点的相对位置. 本文以
基于RSSI优化的模型参数改进室内定位算法
基于RSSI优化的模型参数改进室内定位算法室内定位是指在建筑室内环境中准确确定物体或人的位置。
随着室内定位技术的发展,人们可以利用室内定位算法来实现室内导航、智能家居和安防等应用。
基于无线信号强度指示(RSSI)的室内定位算法被广泛应用于室内定位中。
RSSI是指接收到的信号的强度,可以通过无线技术来获取。
在室内定位中,常常使用无线网络(如Wi-Fi)的信号强度作为定位依据。
基于RSSI的室内定位算法的基本原理是测量接收到的信号强度,然后将其与预先收集到的信号强度数据库进行比较,从而确定物体的位置。
由于室内环境的复杂性和无线信号的不稳定性,基于RSSI的室内定位算法存在一定的误差和不准确性。
为了改进这个问题,研究人员提出了一些优化方法。
对于室内定位算法来说,模型参数的选择非常重要。
模型参数影响着算法的精度和鲁棒性。
需要通过实验和分析来选择最佳的模型参数。
一种常用的方法是使用回归分析来估计模型参数。
回归分析可以通过建立数学模型来找到输入变量(如RSSI)与输出变量(如位置坐标)之间的关系。
然后,通过对大量数据进行测试和训练,优化模型参数,从而提高室内定位算法的准确性。
为了减小RSSI测量误差对定位结果的影响,可以采用滤波技术来平滑RSSI数据。
常用的滤波技术包括移动平均滤波和卡尔曼滤波。
移动平均滤波是一种简单的平均方法,它通过对连续多个RSSI测量值进行平均来减小噪声的影响。
卡尔曼滤波是一种递归滤波方法,可以根据测量噪声、系统模型和控制信号等信息来动态估计物体的位置。
通过应用滤波技术,可以减小RSSI测量误差对定位结果的影响,提高定位算法的精度。
为了提高室内定位算法的性能,可以使用机器学习技术来进行模型参数的优化。
机器学习可以通过学习大量的数据来自动调整模型参数,从而提高算法的性能。
常用的机器学习方法包括支持向量机、神经网络和决策树等。
通过使用机器学习技术,可以更好地适应不同的室内环境和不同的无线信号特性,进一步提高室内定位算法的准确性和鲁棒性。
基于RSSI的定位算法研究与优化

基于RSSI的定位算法研究与优化基于RSSI的定位算法(Received Signal Strength Indicator)是一种常见的无线定位技术,通过测量无线信号的信号强度来确定用户的位置。
该算法常用于室内定位、物联网和智能城市等领域。
RSSI定位算法的原理是基于信号强度与用户距离之间的关系。
通常情况下,信号强度与距离呈反比关系,即距离越远,信号强度越弱。
RSSI 定位算法工作流程如下:1.建立参考数据库:首先,建立一个参考数据库,其中包含已知位置与相应RSSI值的对应关系。
这些已知位置可以在区域内的多个点进行测量和记录。
2. 采集RSSI数据:用户设备测量距离他们的无线接入点(Access Point,AP)的信号强度,并将其设备测量到的RSSI值发送给服务器。
3.RSSI匹配:服务器将用户设备测量到的RSSI值与参考数据库中的RSSI值进行匹配,并找出最佳匹配的位置。
4.定位结果:算法根据匹配度对每个已知位置进行排名,确定最终的用户位置。
1.环境映射优化:环境因素(如障碍物、多径效应等)会影响信号传输和测量准确性。
通过对环境进行建模和映射,可以更准确地估计用户位置。
2.多个AP的使用:使用多个AP可以提高定位的准确性。
通过测量不同AP之间的信号强度,可以使用多边定位算法(如三角定位算法)来准确估计用户位置。
3.机器学习算法:机器学习算法可以通过分析大量的RSSI数据来识别模式,并从中提取特征以改进定位准确性。
常见的机器学习算法包括支持向量机(SVM)、人工神经网络(ANN)等。
4.滤波算法:滤波算法可以减小测量误差对定位结果的影响。
常用的滤波算法包括卡尔曼滤波、粒子滤波等。
5.数据融合:将RSSI定位与其他传感器数据(如加速度计、陀螺仪等)相结合,可以提高定位的准确性和稳定性。
综上所述,基于RSSI的定位算法是一种常见且有潜力的无线定位技术。
通过对算法的优化和改进,可以提高定位的准确性和鲁棒性,进一步推动其在室内定位、物联网和智能城市等领域的应用。
基于RSSI值的定位算法分析与改进

改进的近 似 三 角 形 内 点 测 试 法 (Improved Approximate Point-intriangulation Test,IAPIT)的基 本 思 想 是 ,在 平 面 直 道 类 区 域 内 ,参 考 节 点均匀直线分布, 利用未知节点的邻居节点中的 RSSI 值最大的两个 参考节点确定一个最大矩形区域,然后根据参考节点位置判断未知节 点在哪个矩形区域内, 以 RSSI 值来确定未知节点在矩形区域内的具 体位置。 判断一个点是否在一个矩形区域内的方法是通过各个参考节 点 RSSI 值 的 比 较 , 选 择 RSSI 值 最 大 两 个 参 考 节 点 做 为 区 域 的 边 界 点。 看两个 RSSI 值是否大于最小规定值,大于则说明在矩形外,否则 重新寻找最大 RSSI 值的两个节点。 实际中节点通常情况下是运动的, 所 以 在 直 道 的 某 参 考 结 点 的 垂 线 附 近 ,RSSI 值 中 第 二 第 三 大 值 会 出 现相等的情况,这时可以根据最大 RSSI 值以及另外两个 RSSI 值来判 断在垂线的某个位置,这种算法在与距离无关的定位中是精度较高的 算法,对锚节点密度及分布要求和对网络联通性要求都较低。
度,并且对网络连通性要求较低,甚至连通度为 3 即可满足算法要求。
该算法精度具有很大的伸缩性,通过增加参与计算的参考节点,可以
提高定位精度,但是复杂度方面也会有所增加。
(下转第 141 NCE & TECHNOLOGY INFORMATION
基于改进的RSSI无线传感器网络节点定位算法研究
关 键词 :无线 传感 器 网络 ; 节点 定位 ; 收信 号强度 ; 心定 位 算法 接 质
中图分类 号 :T 3 3 P 9 文献 标志 码 :A 文章 编号 :1 0 - 6 5 2 1 ) 5 1 6 '3 0 13 9 ( 0 2 0 —8 7 0
d i1 . 9 9 ji n 1 0 —6 5 2 1 .5 0 1 o :0 3 6 / .s .0 13 9 .0 2 0 .7 s
ห้องสมุดไป่ตู้
rt m e g t.L sl t s d c n r i o aiai n a g rtm ac u t h o e l c t n a d o tie o e e a t o ain i h w ih s a t y,i u e e t d lc l t lo i o z o h t c Ia ae t e n d o ai n b an d n d x c c t . o o l o T e smu ain r s h h w t a .t e ̄ g r h i r v st e n d o ain a c r c n e u e h o a in er r c mp r d h i lt e u s s o h t h t o i m mp o e h o e l c t c u a y a d r d c s t e lc t r o a e o l t o o o
苟 胜 难
( 山师范 学院 计 算机科 学 学院 , 川 乐山 640 ) 乐 四 104
摘 要 :研 究无线 传感 器 网络 节 点定位 问题 。接收 信号 强度 值 ( S I 直接 影 响无 线传 感 器 网络 节点 定位 准 确 R S)
度 , 有 定位 算法没 有考 虑锚 节点 的 R S 消 息 , 成节 点定位 精度 低 。为 了提 高无 线传 感 器 网络 节 点 的定位 而现 SI 造 精 度 , 出 了一 种基 于 R S 的 质心 定位算 法 。首先通 过无 线信 号强度 计 算 出节 点 间 R S 值 , 提 SI SI 然后 把 R S 值 转 SI
基于RSSI优化的模型参数改进室内定位算法

基于RSSI优化的模型参数改进室内定位算法随着物联网和移动通信技术的发展,室内定位技术逐渐成为了研究热点之一。
室内定位是指在室内环境下利用无线信号、传感器数据等技术手段确定移动终端设备的准确位置信息。
它在商业应用、安防监控、智能家居等领域中具有重要的实用价值。
室内定位技术的研究已经取得了一定的进展,但是在实际应用中还存在一些问题。
其中一个主要问题是定位精度不高,容易受到环境干扰、信号衰减等因素影响,导致定位结果出现偏差。
为了克服这些问题,研究人员提出了基于RSSI(Received Signal Strength Indication)优化的模型参数改进室内定位算法,通过对接收信号强度进行优化,提高定位精度和稳定性。
RSSI是衡量无线信号接收端的功率大小的指标,它可以反映信号在传输过程中的衰减情况。
在室内定位中,接收设备通过接收信号强度来确定自身与发射设备之间的距离,然后利用三角定位等数学方法来计算设备的准确位置。
由于环境复杂、多径效应等因素的影响,RSSI存在一定的误差。
如何有效利用RSSI数据来提高定位精度是当前研究的重点之一。
1. RSSI数据滤波和校正:为了减小RSSI数据的误差,可以采用滑动平均、加权平均等滤波方法进行数据平滑处理,去除数据中的噪声。
还可以通过对比不同位置下的RSSI数据,进行校正和修正,提高RSSI数据的准确性。
2. RSSI信号建模:建立RSSI信号与距离之间的数学模型是室内定位算法改进的关键步骤。
根据实际信道特性和传输模型,可以选择合适的信号传播模型,如自由空间传播模型、多径传播模型等,建立RSSI信号与距离之间的映射关系。
通过模型拟合和优化,可以得到更为准确的距离估计值,提高定位精度。
3. 模型参数自适应调整:在建立RSSI信号与距离关系模型的过程中,需要确定一些参数,如信号传播指数、路径损耗系数等。
而这些参数的选择对算法的精度和泛化能力具有重要影响。
通过实时获取RSSI数据,可以采用自适应的方法来调整模型参数,使其能够更好地适应不同环境下的定位需求。
基于RSSI测距的室内定位算法优化
基于RSSI测距的室内定位算法优化作者:邵金均来源:《中国新通信》 2018年第20期邵金均浙江师范大学工学院职业技术教育学院【摘要】室内无线定位在生产、物流、监控等方面都有广泛用途。
受无线通信距离和环境的影响,基于 RSSI 的室内定位存在误差较大的问题,本文设计了一种基于 RSSI 的定位优化方案来实现较高精度的室内无线定位。
先对整个定位区域进行节点密度优化,通过区域划分,拟合区域的环境参数,再对节点信号进行滤波并选择,获得高可信度信号值,最后采用加权质心算法作定位计算,从而提高定位的精度。
本方案利用 CC2530 ZigBee 模块进行定位实验,实验结果表明,本方法室内定位精度较高,具有一定的应用前景。
【关键词】无线传感器网络室内定位 RSSI 测距一、引言室内无线定位,是指利用无线网络和定位终端为用户提供位置、速度和方向等相关信息的服务。
对一个定位算法的性能评价标准主要包括定位精度、节点密度、容错性和自适应性、功耗、代价等[1] 。
无线传感器网络定位方法较多,其中,基于距离的定位技术主要有四种:基于信号传输时间( TOA ) 、基于信号传输时间差 ( TDOA) 、基于信号到达角度( AOA) 和基于接收信号强度指示 ( RSSI) 等技术方法。
目前,基于 RSSI 的定位方法能充分利用已有的无线网基础设施,节点无需增加额外的硬件装置,功耗低,成本低,但在实际环境中受到反射、多径传播、天线增益、障碍物等多种因素影响,存在测距误差较大的问题。
在文献[2]中,分析了外部环境、节点自身特性、天线朝向等对 RSSI 测量值的影响,在文献[3]中,明确了 RSSI 测距模型在 0 ~ 10m 范围内有较好的相关性 , 随着节点距离增大,测距精度下降,因此该方法比较适合短距离测距。
在文献[4] 中,验证了室验环境下通信距离超过 5m 时测距误差会明显增大。
但是, RSSI 值容易受到环境的影响,需对 RSSI 值滤波并更新参数。
基于RSSI的定位算法研究与优化
信号强度RSSI,可以根据如下公式计算出两者的距离。
(1) 其中D是计算距离,RSSI是接收信号强度,A为发射端和接收 端相隔1米时的信号强度,n是环境衰减因子,跟环境有关。
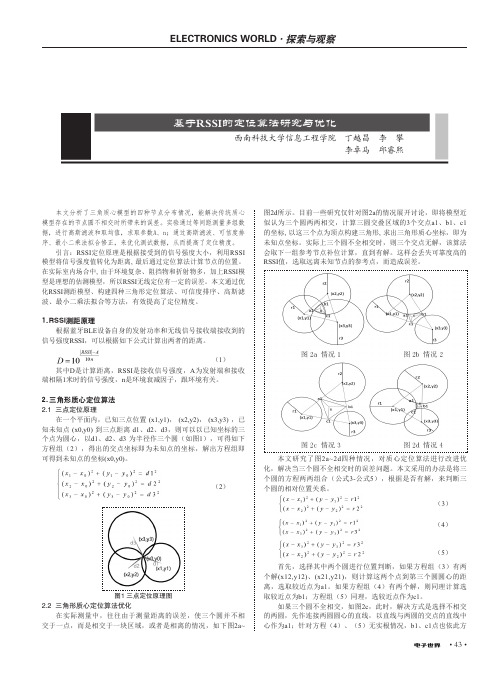
2.三角形质心定位算法 2.1 三点定位原理
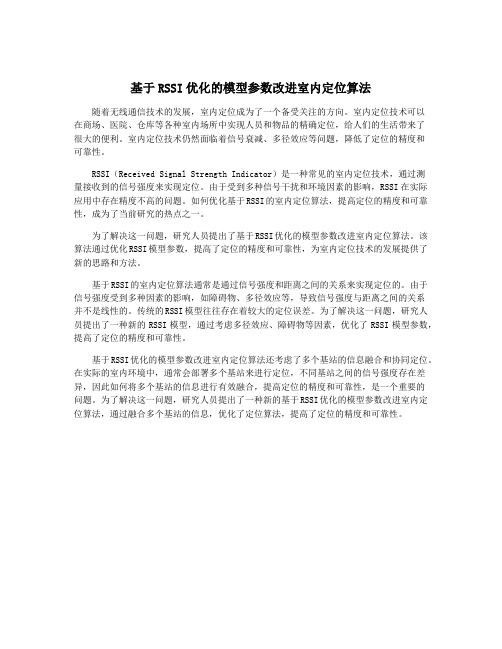
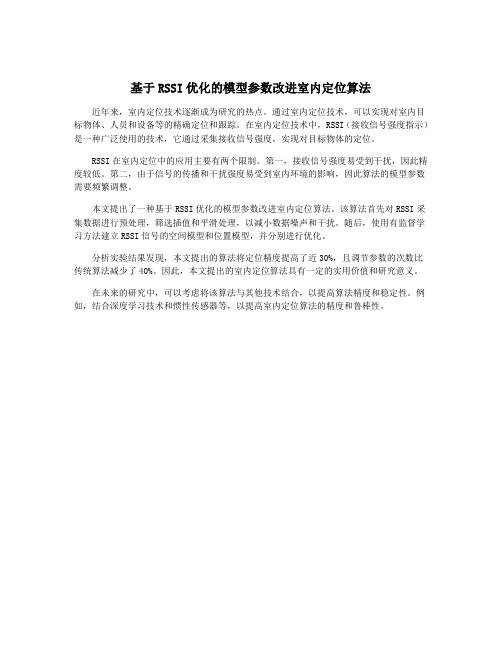
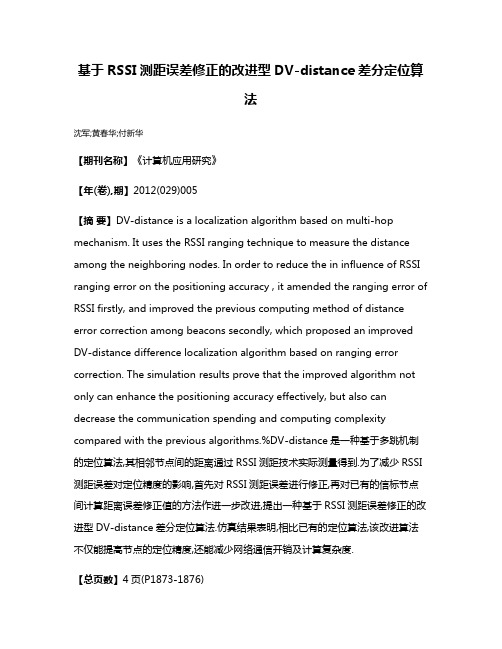
在一个平面内,已知三点位置 (x1,y1), (x2,y2), (x3,y3) ,已 知未知点 (x0,y0) 到三点距离 d1、d2、d3,则可以以已知坐标的三 个点为圆心,以d1、d2、d3 为半径作三个圆(如图1),可得如下 方程组(2),得出的交点坐标即为未知点的坐标,解出方程组即 可得到未知点的坐标(x0,y0)。
杂,则n值越大,信号能量随着距离增大衰减得越快。不同环境下
这两个参数会有所差异,因此需通过多次实际试验测量。测试法测
取参数A和n的步骤如下:
(1)先将被测节点置于接收节点的前方1m处,读取接收节点
接收到的信号强度值RSSI,接收50个数据后,去除最大最小值,
再用高斯滤波法,过滤出现频率低的低概率数据,再求均值作为
个顶点上,来接收该区域内的未知节点的信号能量。在实际更大范
围的空间中,需要布置更大密度的参考节点。
(2)由于在同一位置测得的RSSI值会存在一定随机波动,而
该误差近似服从正态分布,因此需要采集30次未知节点的RSSI,将
数据集合进行高斯滤波,选择高概率分布的数据,再求均值,作为
定位节点与此参考节点的RSSI值。
数据进行计算。
(4)通过RSSI测距公式(1),求得三个参考节点与未知节点的
相对距离d1、d2、d3,判断三个圆的空间相对位置情况,并计算相交
点或相离的中间点。利用算法构建出三角形后,通过质心算法,计算 未知位置的坐标点。本次测量了4个位置点的数据如下表2所示。
基于RSSI的无线定位差分修正改进算法_徐进
根据三边测量基本原理, 由方程组( 8 ) 可求解出质心( x' A , y' A ) , 作为 A 的定位坐标, 然后与 A 的实际坐标相减:
每两个方程进行求解, 分别求解得到( x1 , 根据方程组( 5 ) , y1 ) 、 ( x2 , y2 ) 、 ( x3 , y3 ) 。
{
{
Δx A = x ' A - x A Δy A = y ' A - y A
[4 ]
。一般来说, 测距定位算法具有较高
[5 - 6 ]
提出 为理论基础,
的定位精度, 但对节点硬件要求较高 。 基于 RSSI 的定位算法 由于成本低, 操作简单而受广泛的关注 。 但是, 室内环境中相比广阔的室外有更多的干扰因子, 使 得各种定位算法的定位精度降低, 误差很大。 因此, 如何提高 室内定位精度是一个比较有意义的问题 。目前, 应用于室内无 线定位的算法也很多, 比如:基于 RSSI 差分修正的加权质心定 位算法
{
( x - xi ) + ( y - yi ) = d
2
2
2 i
( x - x j ) 2 + ( y - y j ) 2 = d2 j ( x - xk ) + ( y - yk ) = d
2 2 2 k
(5)
{
( x' A - x B ) 2 + ( y' A - y B ) 2 = d2 AB ( x' A - x C ) 2 + ( y' A - y C ) 2 = d2 AC ( x' A - x D ) 2 + ( y' A - y D ) 2 = d2 AD (8)
基于RSSI的矿山井下机车定位算法的改进
55 4
计 算机与数字工程
C o mp u t e r& D i g i t a l E n g i 5年第 4期
基 于 RS S I的矿 山井 下机 车定 位 算 法 的改进
朱泽朋 王 凯 岳 雨俭
Ab s t r a c t Th e t r a d i t i o n a l u n d e r g r o u n d mi n e l o c o mo t i v e l o c a t i o n g e t s l a r g e e r r o r s a n d i s n o t f l e x i b l e e n o u g K S o i m— p r o v e d r e c e i v e d s i g n a l s t r e n g t h i n d i c a t i o n ( RS S I )l o c a t i o n a l g o r i t h m o f u n d e r g r o u n d mi n e l o c o mo t i v e i s p r o p o s e d .I n o r d e r t o r e d H o e t h e l o c o mo t i v e mo v e me n t e r r o r ,t h e RS S I v a l u e s a r e me a s u r e d mu l t i p l e a n d h a n d l e wi t h s q u a r e s c u r v e f i t . Th e n a c — c o r d i n g t O t h e f i t t i n g f u n c t i o n,t h e RS S I v a l u e wh i c h i s t h e o n e a f t e r t h e t i me o f r u n ni n g a l g o r i t h m a n d n e t wo r k d e l a y i s c a l c u —
基于RSSI差分修正的加权质心定位算法
基于RSSI差分修正的加权质心定位算法花超;吉小军;蔡萍;韩韬【期刊名称】《传感器与微系统》【年(卷),期】2012(31)5【摘要】为了抑制接收信号强度指示(RSSI)误差对无线传感器网络节点定位精度的影响,从消除RSSI误差的角度,提出了一种基于对RSSI距离值差分修正的加权质心定位算法.该算法计算简单,无需硬件扩展,仿真结果表明:该算法比传统算法有更好的定位性能.%In order to suppress the effects of RSS1 error on WSNs node positioning precision,from the point of view of eliminating RSSIerror,weighted centroid localization algorithm based on distance difference correction of RSSI for WSNs. This localization algorithm docsn' t need additional hardware expansion, easy computation. Simulation results show that this algorithm has better localization performance than classical algorithm.【总页数】4页(P139-141,144)【作者】花超;吉小军;蔡萍;韩韬【作者单位】上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240【正文语种】中文【中图分类】TP301【相关文献】1.基于修正RSSI值的加权质心定位算法 [J], 陈璇;董仕鹏2.基于RSSI修正加权质心的定位算法 [J], 白梦如;徐钊;郑红党3.基于RSSI修正的近似三角形加权质心定位算法 [J], 童莉;周鸣争;4.基于RSSI的改进差分修正加权质心定位算法 [J], 余学帆;王宏志;韩博;曹学瑶;胡黄水5.基于RSSI的改进加权质心定位修正算法 [J], 龙佳;卑璐璐;李轶;张申因版权原因,仅展示原文概要,查看原文内容请购买。
基于RSSI优化的模型参数改进室内定位算法
基于RSSI优化的模型参数改进室内定位算法随着无线通信技术的发展,室内定位成为了一个备受关注的方向。
室内定位技术可以在商场、医院、仓库等各种室内场所中实现人员和物品的精确定位,给人们的生活带来了很大的便利。
室内定位技术仍然面临着信号衰减、多径效应等问题,降低了定位的精度和可靠性。
RSSI(Received Signal Strength Indicator)是一种常见的室内定位技术,通过测量接收到的信号强度来实现定位。
由于受到多种信号干扰和环境因素的影响,RSSI在实际应用中存在精度不高的问题。
如何优化基于RSSI的室内定位算法,提高定位的精度和可靠性,成为了当前研究的热点之一。
为了解决这一问题,研究人员提出了基于RSSI优化的模型参数改进室内定位算法。
该算法通过优化RSSI模型参数,提高了定位的精度和可靠性,为室内定位技术的发展提供了新的思路和方法。
基于RSSI的室内定位算法通常是通过信号强度和距离之间的关系来实现定位的。
由于信号强度受到多种因素的影响,如障碍物、多径效应等,导致信号强度与距离之间的关系并不是线性的。
传统的RSSI模型往往存在着较大的定位误差。
为了解决这一问题,研究人员提出了一种新的RSSI模型,通过考虑多径效应、障碍物等因素,优化了RSSI模型参数,提高了定位的精度和可靠性。
基于RSSI优化的模型参数改进室内定位算法还考虑了多个基站的信息融合和协同定位。
在实际的室内环境中,通常会部署多个基站来进行定位,不同基站之间的信号强度存在差异,因此如何将多个基站的信息进行有效融合,提高定位的精度和可靠性,是一个重要的问题。
为了解决这一问题,研究人员提出了一种新的基于RSSI优化的模型参数改进室内定位算法,通过融合多个基站的信息,优化了定位算法,提高了定位的精度和可靠性。
基于RSSI优化的模型参数改进室内定位算法

基于RSSI优化的模型参数改进室内定位算法1. 引言1.1 背景介绍由于室内环境复杂多变,信号受干扰影响较大,导致传统的RSSI定位算法存在定位精度不高、容易受到干扰等问题。
对RSSI定位算法的模型参数进行优化改进,是提高定位准确性和稳定性的重要途径。
本研究旨在基于RSSI优化的模型参数改进室内定位算法,通过对模型参数进行优化,提高定位算法的性能表现,实现更准确、更稳定的室内定位。
通过实验设计和结果分析,探讨改进算法的性能评估,并进一步探讨优化策略,为室内定位技术的发展提供新的思路和方法。
【2000字】1.2 研究意义室内定位技术在现代社会中扮演着越来越重要的角色,对于提升用户体验、优化资源管理、促进智能化生活等方面都具有重要意义。
而基于RSSI优化的模型参数改进室内定位算法,可以有效提升定位精度和稳定性,从而更好地满足实际需求。
通过优化模型参数,可以降低定位误差,提高定位精度。
在室内定位应用场景中,定位精度往往是用户体验的重要指标,优化模型参数可以有效提升精度,使得用户在室内环境中可以更准确地获取自己的位置信息,从而提升定位算法的实用性和可靠性。
改进室内定位算法的性能可以促进室内场所的智能化发展。
随着智能建筑、物联网等技术的飞速发展,室内定位技术的需求也在不断增加。
优化算法性能可以提高室内定位系统的稳定性和准确性,为智能化建筑、智能导航、室内定位导航等领域的应用提供更可靠的支持,推动室内场所的智能化发展。
研究基于RSSI优化的模型参数改进室内定位算法具有重要的实用价值和社会意义,对推动室内定位技术的发展和智能化生活的实现具有积极意义。
1.3 研究目的研究目的是为了提高室内定位算法的精度和稳定性,通过对RSSI技术进行优化,使定位结果更加准确和可靠。
通过本研究,我们希望能够探索基于RSSI优化的模型参数,进一步完善室内定位算法,提高定位的准确性和实用性。
我们也希望通过本研究对室内定位算法中的关键参数进行调整和优化,从而提高算法的性能和效率。
基于RSSI优化的模型参数改进室内定位算法
( 1) 在理想情况下,三个圆交于一点,如图 1 所示:
图 1 相交与一点
公式为:
( x - xi ) 2 + ( y - yi ) 2 = d2i ( i = 1,2,3)
( 4)
由公式( 4) 可以得到定位位置 D 点坐标:
( )x = y
( 2( x1 - x3) 2( x2 - x3)
RSSI 值相对传输距离的变化表现明显,参考价值大。因此实验
只取前 10m 的数据以满足更为精确的定位要求。
本实验接收到 RSSI 值有 200 个,对其进行高斯滤波,留下
中间 120 个,对它们进行从大到小排序,平均分为 4 组,编号为
A、B、C、D,对 各 组 的 数 据 求 平 均 值,分 别 记 作 RSSIA ,RSSIB ,
1
1
1
+
+
| RSSIa | | RSSIb | | RSSIc |
( 3)
其中,修正因子为 1 / | RSSIa | ,1 / | RSSIb | ,1 / | RSSIc | ,它
体现了未知节点收到锚节点 a、b、c 的 RSSI 值大小的影响力。
收到某锚节点的 RSSI 值越大,离该锚节点越近,未知节点所在
RSSI 值不准确的问题,文章[1]采用高斯滤波对其进行改进,
优化了 RSSI 值。文章[2]将将整体环境进行分区,在不同区域
进行模型参数的拟合,提高了测距精确度。文章[3]先获得未
知节点所在的最小子区域,然后用路径损耗模型对参数进行了
实时估计,提 高 了 模 型 参 数 的 精 确 度。受 上 述 相 关 研 究 的 启
区域的模型参数越接近该锚节点处的模型参数。
基于RSSI优化的模型参数改进室内定位算法
基于RSSI优化的模型参数改进室内定位算法室内定位是指在室内环境中通过无线信号进行定位的技术。
目前,常用的室内定位技术主要有基于RSSI(接收信号强度指示)的方法和基于ToF(飞行时间)的方法。
基于RSSI 的方法是一种比较常见和简单的方法,通过测量接收到的信号强度来进行定位。
由于室内环境的复杂性和无线信号的传播特性,室内定位精度往往较低。
对于基于RSSI的室内定位算法来说,如何优化模型参数以提高定位精度是一个关键问题。
需要合理选择模型参数。
模型参数主要包括路径损耗指数和系统噪声。
路径损耗指数描述了信号在传输过程中的衰减程度,而系统噪声则描述了信号接收过程中的干扰程度。
合理选择这些参数可以更准确地描述实际室内环境和无线信号特性,从而提高定位精度。
需要采集大量的RSSI数据。
通过采集一定数量和范围的RSSI数据,可以获取更多的不同位置和状态下的数据样本,从而减小定位误差。
需要注意采集数据的时机和频率,以保证数据的实时性和准确性。
然后,可以利用机器学习或优化算法对模型参数进行优化。
机器学习算法可以通过对已有的RSSI数据进行训练和学习,从而自动找到最优的模型参数。
可以使用支持向量机(SVM)或人工神经网络(ANN)等算法进行建模和训练。
优化算法(如遗传算法、粒子群优化等)也可以用来寻找最优的模型参数组合。
需要进行实验验证和性能评估。
将优化后的模型参数应用到实际的室内定位系统中,并进行实时定位测试和性能评估。
通过和真实位置进行比对,可以得出定位误差和准确率等指标,从而评估算法的性能和效果。
基于RSSI优化的模型参数改进室内定位算法可以通过合理选择模型参数、采集大量的RSSI数据、利用机器学习或优化算法优化模型参数以及进行实验验证和性能评估等步骤,提高室内定位的精度和实时性。
基于RSSI优化的模型参数改进室内定位算法
基于RSSI优化的模型参数改进室内定位算法
近年来,室内定位技术逐渐成为研究的热点。
通过室内定位技术,可以实现对室内目标物体、人员和设备等的精确定位和跟踪。
在室内定位技术中,RSSI(接收信号强度指示)是一种广泛使用的技术,它通过采集接收信号强度,实现对目标物体的定位。
RSSI在室内定位中的应用主要有两个限制。
第一,接收信号强度易受到干扰,因此精度较低。
第二,由于信号的传播和干扰强度易受到室内环境的影响,因此算法的模型参数需要频繁调整。
本文提出了一种基于RSSI优化的模型参数改进室内定位算法。
该算法首先对RSSI采集数据进行预处理,筛选插值和平滑处理,以减小数据噪声和干扰。
随后,使用有监督学习方法建立RSSI信号的空间模型和位置模型,并分别进行优化。
分析实验结果发现,本文提出的算法将定位精度提高了近30%,且调节参数的次数比传统算法减少了40%。
因此,本文提出的室内定位算法具有一定的实用价值和研究意义。
在未来的研究中,可以考虑将该算法与其他技术结合,以提高算法精度和稳定性。
例如,结合深度学习技术和惯性传感器等,以提高室内定位算法的精度和鲁棒性。
基于RSSI测距误差修正的改进型DV-distance差分定位算法
基于RSSI测距误差修正的改进型DV-distance差分定位算法沈军;黄春华;付新华【期刊名称】《计算机应用研究》【年(卷),期】2012(029)005【摘要】DV-distance is a localization algorithm based on multi-hop mechanism. It uses the RSSI ranging technique to measure the distance among the neighboring nodes. In order to reduce the in influence of RSSI ranging error on the positioning accuracy , it amended the ranging error of RSSI firstly, and improved the previous computing method of distance error correction among beacons secondly, which proposed an improved DV-distance difference localization algorithm based on ranging error correction. The simulation results prove that the improved algorithm not only can enhance the positioning accuracy effectively, but also can decrease the communication spending and computing complexity compared with the previous algorithms.%DV-distance是一种基于多跳机制的定位算法,其相邻节点间的距离通过RSSI测距技术实际测量得到.为了减少RSSI 测距误差对定位精度的影响,首先对RSSI测距误差进行修正,再对已有的信标节点间计算距离误差修正值的方法作进一步改进,提出一种基于RSSI测距误差修正的改进型DV-distance差分定位算法.仿真结果表明,相比已有的定位算法,该改进算法不仅能提高节点的定位精度,还能减少网络通信开销及计算复杂度.【总页数】4页(P1873-1876)【作者】沈军;黄春华;付新华【作者单位】桂林空军学院科研部广西桂林 541003;广西英华国际职业学院信息学院,广西钦州 535000;桂林空军学院航空兵参谋系广西桂林 541003【正文语种】中文【中图分类】TP393;TP301.6【相关文献】1.基于节点RSSI值与临界RSSI比例的跳数修正和跳距重估的DV-HOP算法 [J], 方旺盛;雷高祥2.基于RSSI测距误差修正的方法 [J], 黄春华;韦海清3.基于RSSI测距误差修正的加权质心定位算法 [J], 刘晓文;关维国;邹德君;武慧君4.基于混合高斯模型测距误差修正和EM-SOM的节点定位算法设计 [J], 韩小祥5.基于RSSI滤波的改进型泰勒级数室内定位算法 [J], 程俊;周礼争;余敏;唐瑞因版权原因,仅展示原文概要,查看原文内容请购买。
基于RSSI测距修正和集员法节点定位算法

基于RSSI测距修正和集员法节点定位算法房亚群;安进【摘要】为降低基于接收信号强度指示(received signal strength indication,RSSI)测距误差,提出基于RSSI测距修正和集员法的节点定位算法(improved RSSI ranging and set membership based localization,I-RSSI-SM-L),通过修正RSSI测距,利用集员法估计节点位置,提高定位精度.在测距阶段,估算模型参数,通过测距误差校正测距值,建立置信区间;在定位阶段,通过集员法获取未知节点的位置的粗略范围,通过网格扫描法收缩范围,直至一点,此点位置就是未知节点的位置.实验结果表明,I-RSSI-SM-L算法降低了测距误差,抑制了定位的均方定位误差.%To reduce ranging error of received signal strength indication,the improved RSSI ranging and set membership based localization (I-RSSI-SM-L) algorithm was proposed.I RSSI-SM-L algorithm improved location accuracy through improved RSSI ranging and set membership based localization.In the ranging stage,the parameters of the model were estimated,and the relative error coefficient was used to correct the ranging,and the confidence intervals of ranging were built.In the positioning phase,the rough range of unknown node position was solved using set membership algorithm,and the range of unknown node position was shrunk by grid scanning until a point emerged,and the position of the point was the position of unknown node.Experimental results show that the ranging error of I-RSSI-SM-L is reduced,the mean square localization error is suppressed.【期刊名称】《计算机工程与设计》【年(卷),期】2018(039)002【总页数】5页(P463-467)【关键词】无线传感网;RSSI测距;测距误差;置信区域;集员法;网格扫描【作者】房亚群;安进【作者单位】江苏食品药品职业技术学院信息工程系,江苏淮安223003;江苏食品药品职业技术学院信息工程系,江苏淮安223003【正文语种】中文【中图分类】TP3930 引言依据在估计未知节点位置的过程中是否使用距离划分,现在的传感节点定位算法[1-4]可分为基于测距定位和基于非测距定位两类。
基于RSSI的测距差分修正定位算法
基于RSSI的测距差分修正定位算法
任维政;徐连明;邓中亮;王川
【期刊名称】《传感技术学报》
【年(卷),期】2008(021)007
【摘要】为了抑制RSSI误差对无线传感器节点自身定位精度的影响,以三边定位算法为基础,定义了个体差异差分系数、距离差分系数和距离差分定位方程,把离目标节点最近的信标节点作为参考节点对基于RSSI的测距进行差分修正,并将差分法和质心法相结合提出了一种测距差分修正定位算法.该定位算法无需增加额外硬件开销,容易实现,定位误差可小于2.5m,适合于处理能力和能量有限的无线传感器网络节点.
【总页数】4页(P1247-1250)
【作者】任维政;徐连明;邓中亮;王川
【作者单位】北京邮电大学电子工程学院,北京,100876;北京邮电大学电子工程学院,北京,100876;北京邮电大学电子工程学院,北京,100876;北京邮电大学电子工程学院,北京,100876
【正文语种】中文
【中图分类】TP919.2;TP212
【相关文献】
1.基于RSSI测距修正和集员法节点定位算法 [J], 房亚群;安进
2.基于RSSI测距误差修正的改进型DV-distance差分定位算法 [J], 沈军;黄春华;
付新华
3.基于RSSI的测距技术的自动修正定位算法 [J], 龙海燕;张天飞;丁娇;梁美玉;张磊
4.一种改进的基于RSSI测距的室内三维修正定位算法 [J], 徐进;李时铭;谢建中;杨栋梁;张丙钊
5.基于RSSI测距自修正的遗传定位算法 [J], 杨路;刘慧珍
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大于等于 3 个,该方程组是超定的。借鉴文献[3]的方法,
采用加权最小二乘法(WLS)求解超定方程组(1),详细求解
过程如下:
①分别用后面的方程减去第一个方程,可以将上述方程
组简化成线性方程组,即:
AX = b ,
(2)
X
=
⎛ ⎜ ⎜
x0 #
⎞ ⎟ ⎟
,
A=
⎛ ⎜
x2
⎜
− #
x1
⎜⎝ y0 ⎟⎠
⎜⎝ xi − x1
文献[2]提出了根据 RSSI 差值定位的方法,该方法将 MR
收稿日期:2011-01-09。 基金项目:国家自然科学基金(批准号:50877004)。 作者简介:王振强(1971-),男,博士研究生,主要研究方向为无线网
络系统优化,无线接入网络;朱义胜(1945-),教授,男, 博士生导师,主要研究方向为电路理论、宽带匹配和数字信 号处理。
78
中的基站两两结合为一组,根据每个分组两基站的 RSSI 差 值分别画出一个圆,用这些圆的交点的中心作为手机位置的 估计。文献[3]给出了最大似然法求解基于 TOA(到达时延) 差值的定位方程组的方法,给出了较高的定位精度。文献[4] 给出泰勒法求解多点定位的方法,根据 TOA 估计终端位置。 Liu Bo-Chieh[5]提出了一种方法来消除接收强度差(SSSD) 中的测量误差。文献[6]改进了文献[4]中初始值的选择。文 献[7]讨论了文献[3]的误差。
实距离。 Ψ = E(ψψ T ) = 4DQD ,
(8)
其中,Ψ 是ψ 的协方差矩阵, Q 是距离测量误差 n 的协方
差矩阵。因为Ψ 中包含了手机终端与基站间的真实距离,这
里无法得到。为了求解方程组,必须进一步假设,这里先假
设 D ≈ d 0I ,I 为单位矩阵,d 0 为统一的距离差,因此由(6)
1 基于RSSI差值的定位算法
以 GSM 网络为例,手机在通话过程中,每隔 480 ms 向
基站控制器(BSC)上报一次测量报告。测量报告的内容包
括[8]:服务小区的 RSSI 和 TA(到达时延),6 个最强邻区的
RSSI。将这 7 个接收强度测量值代入电波传播模型,可以得
出移动终端到每个基站的距离估计,进而通过求解方程组,
从测试数据中提取测量报告中的 RSSI 和 TA 等定位基础 数据,将基站的经纬度变换成平面直角坐标,然后根据式(6) 计算出终端的初步估计位置,再进一步用式(9)计算出精 确的估计位置。这里,取 σ 2 =18。为了评估定位精度,这里 把估计位置和终端真实位置的距离偏差作为定位误差,把 67%和 95%的测试样本所能达到的定位精度作为评价算法优 劣的标准。该文将此改进算法与 CI、CI+TA 和质心定位三种 方法进行了定位精度对比。结果表明改进后的 RSSI 差值定 位的精度远高于 CI+TA 定位。当参与定位的基站数量为 6 时, 基于 RSSI 差值的定位方法可以达到 E911 二阶段定位精度要 求。应用改进 RSSI 差值方法进行定位,参与定位的基站数 量越多,定位误差越小,定位精度越高。图 2 给出各种定位 方法的定位误差 CDF 分布,很明显,RSSI 差值定位的精度远 高于 CI 和 CI+TA 定位。但 RSSI 差值定位要求参与定位的基 站数量最小为 3 个,而 CI 和 CI+TA 定位对参与基站的数量 无要求。
型[9-10],结合试验区域的场景,确定了相关传播模型参数。 根据 COST231 模型,无线传播损耗 Lb 由三部分组成,即: Lb = Lf + Lmsd + Lrts ,
其中, Lf 表示自由空间损耗, Lmsd 表示由于连排房屋引起
的多重障碍屏绕射损耗,Lrts 表示从屋顶到路面的绕射损耗。
A−1 表示 A 的逆,如果参与定位的基站数大于 3 个,可
以采Байду номын сангаас最小二乘法来求解,其解为:
X = ( AT A)−1 ATb ,
(4)
AT 表示 A 的转置, A−1 表示 A 的逆;
③进一步考虑到误差,则方程可表示为:
ψ = b − AX 。
(5)
ψ 为误差向量,参照文献[3],使用加权最小二乘法可
(14)
对于 1 800 MHz 频段:
d = 10(−I −97.3919)/38 。
(15)
3 定位结果对比
为验证改进的基于 RSSI 差值定位方法的定位精度,以
79
某运营商 GSM 网络为基础设计了一个定位精度试验。试验 选取了某城区 2 km×0.5 km 的长方形区域作为定位测试评 估区域,该区域有 10 个基站,基站间的平均距离为 700 米,平均街道宽度 w 为 20 米,基站和平均屋顶高度差 ∆hb 为 8 米,屋顶和手机终端的高度差 ∆hm 为 16 米。使用 GPS 定位设备及测试手机和测试软件进行 DT 测试,同时收集 MR 数据。
2011 年第 07 期,第 44 卷
通信技术
Vol.44,No.07,2011
总第 235 期
Communications Technology
No.235,Totally
·应 用·
改进的基于 RSSI 差值的定位算法
王振强, 朱义胜
(大连海事大学,辽宁 大连 116023)
【摘 要】基于强度(RSSI)的移动终端定位方法有其特有的优势,是测量报告(MR)分析中一项关键技术。为了提高定
式可以得到(9)式。 X ≈ ( AT Q−1A)−1 AT Q−1b 。
(9)
这里, Q 是距离测量误差 n 的协方差矩阵,参照文献[4],
距离测量误差定义如下:
⎛σ 2
0.5σ 2 ⎞
Q
=
⎜ ⎜
#
⎟ ⎟
。
⎜⎝ 0.5σ 2
σ 2 ⎟⎠
(10)
这里, σ 为距离测量标准差。试验证明,多数情况下,
用式(9)得出的定位精度已经足够,如果想进一步提高精
【中图分类号】TN929.53
【文献标识码】A
【文章编号】1002-0802(2011)07-0078-03
A Modified Mobile Location Algorithm based on RSSI Difference
WANG Zhen-qiang, ZHU Yi-sheng
(Information Science and Technology College, Dalian Maritime University, Dalian Liaoning 116023, China)
y2
− #
y1
⎞ ⎟ ⎟
,
yi − y1 ⎟⎠
b
=
⎛ ⎜ ⎜
( x2 2
−
x12 )
+
(
y22
− #
y12 )
−
(d22
−
d12
)
⎞ ⎟
⎟
;
⎜ ⎝
( xi 2
−
x12 )
+
( yi2
−
y12 )
−
(di2
−
d12 )
⎟ ⎠
②如果参与定位的基站数等于 3 个,则上述方程的解为:
X = A−1b ,
(3)
【Key words】location; RSSI; WLS; Mobile
0 引言
目前,移动终端定位算法主要包括[1]:小区识别码(CI) 定位,小区识别码和到达时延(CI+TA)定位和多基站质心 定位。CI 定位对手机没有特殊要求,采用基站的扇形覆盖中 心作为终端的估计位置。CI+TA 定位是对 CI 定位的改进,它 将基站覆盖扇形区域中由 TA 所决定的 550 米宽度环形的中 心作为终端的估计位置。多基站质心定位首先得到测量报告 中的所有基站的位置,然后求这些位置的中心,作为终端位 置的估计。这些定位方法的优势是所有手机和网络均支持, 技术简单,系统成本低,因此在测量报告(MR)分析中,得到 广泛应用。然而,这些定位方法的定位精度不高,达不到某 些应用场合的要求。因此,大量的研究者致力于提高移动终 端的定位精度,提出了各种有效的定位算法。
【Abstract】An effective algorithm for mobile terminal location is proposed, which uses Weighted Least Square to resolve linear equations and requires no hardware modification of the network equipment. The proposed algorithm takes into account the distance error, and resolves the equations twice, thus to eliminate the error. The results of driving test indicate that the modified algorithm is much better than CI+TA method and Cell center method in positioning accuracy.
( x2 − )x0 2 + ( y2 − )y0 2 = d22
#
(1)
( xi − x0 )2 + ( yi − y0 )2 = di2。
(x1, y1)
d1 (x0 , y0 )
d2
d3
(x3 , y3 )
(x2 , y2 )
图 1 手机定位算法示意
方程组(1)是一个非线性方程组,如果参与定位基站