26TDOA定位的Chan算法MATLAB源代码
基于TDOA的CHAN算法在UWB系统中的应用
出 了主要 针 对 室 内物体 的基 于到 迭 时 问差 ( DOA)的 定 位 算 T
法 。 首 先 对 常 用 的 CH N 算 法 在 L A OS情 况 下 的 性 能 展 开 研
究 .得 出此 算 法对 于服 从 正 态分 布 的误 差有 很 好 的 性 能 ,然 后
仿 真 结果 表 明 ,CHA 算 法定 位 性 能 可 以 达到 理 想 效 果 。 N 关键 词 :T DOA;CH AN 算 法
置。
间/ 到达 时 间 差 )的 测 量 值 就 构 成 一 组 关 于 目标 位 置 的 圆 周 曲
线 / 曲线 方 程 组 ,求 解 该 方 程 组 就 可 以 得到 目标 的估 计 位 置 。 双 但 是 定 位方 程 组 都 是 非 线 性 的 ,而 且 测 量 总 存 在 误差 ,其 中 的
应用 ,基 于无 线 网 络定 位技 术 的应 用 ,脉 冲超 宽 带 ( R U I — WB)
=
f Y ’ ( Q1 ) Q1 】 - - r≈ - h
△ = △ 2 1●●●●●●●● J Y2 r △ J △3 r
() 2
无线定位技 术尤其具有广 阔的发展前 景。U WB信 号 实 现 定 位
E A 算 法 H N
在 超 宽 带室 内定 位 系 统 中 ,一 旦 获 得 T A F O ( 达 时 O FD A 到 间/ 到达 时 间差 )的测 量 值 ,就 可 以得 到 目标 到 定 位 站 的 距 离
或 目标 到两 个 定 位站 之 间 的距 离 差 ,多 个 T I DOA ( 达 时 OA T 到
与 跟 踪具 有 以下 优 势 : ( )具 有极 高 的距 离 分 辨 能力 。 1
浅析无线电考试作弊信号快速定位方案高超

浅析无线电考试作弊信号快速定位方案高超发布时间:2021-08-31T02:56:30.862Z 来源:《中国科技人才》2021年第15期作者:高超[导读] 本文首先梳理了无线电考试作弊信号的种类及原理,其对考试公平、公正带来的挑战,最后结合最近无线电定位技术如何解决排查工作中遇到的问题提出了一种基于TDOA技术快速锁定信号源的解决方案。
德州市无线电监测中心山东省德州市 253000摘要:本文首先梳理了无线电考试作弊信号的种类及原理,其对考试公平、公正带来的挑战,最后结合最近无线电定位技术如何解决排查工作中遇到的问题提出了一种基于TDOA技术快速锁定信号源的解决方案。
关键词:无线电考试作弊 TDOA定位智能识别分析1.前言近年来,随着通信技术的发展,使得人们可以利用通信设备和网络实现5W(Whoever、Whenever、Wherever、Whomever、Whatever),即任何人可在任何时候、任何地方与任何人进行任何形式的通信,这使得考场内的考生可以方便地通过无线电设备与考场外人员进行信息交换,为考生从场外获取与考试相关的信息的作弊行为提供了方便的工具。
如今无线电技术正与考试作弊加速融合,利用无线技术的作弊助考行为,已经形成了整套地下产业链和商业模式,并趋于成熟;非法盗用和侵占合法的无线电频率,影响了正常的无线电通信和电磁环境。
在快速甄别作弊信号后,如何能够快速、准确的确定作弊设备位置,对打击高科技、隐蔽性强、组织严密的利用无线电技术进行违法作弊的犯罪分子有极大的意义。
2.无线电考试作弊技术特点及发展趋势利用无线电设备进行考试作弊发送答案有两种途径:一种是发射模拟语音信号,接收端通常是微型耳机;另一种是发射数字调制的文本,接收端为带显示屏的伪装文具。
由于防控和定位手段的介入,作弊团伙的警惕性越来越高,作案方式由手动发射信号,逐步升级为通过互联网遥控作弊发射设备进行发射,以免暴露自身。
2.1 语音信号语音信号主要集中在130M-170M、220M、400-470M、1150M、1250M等,通常为窄带的调频信号,发射功率一般不超过5W。
matlab单点定位代码
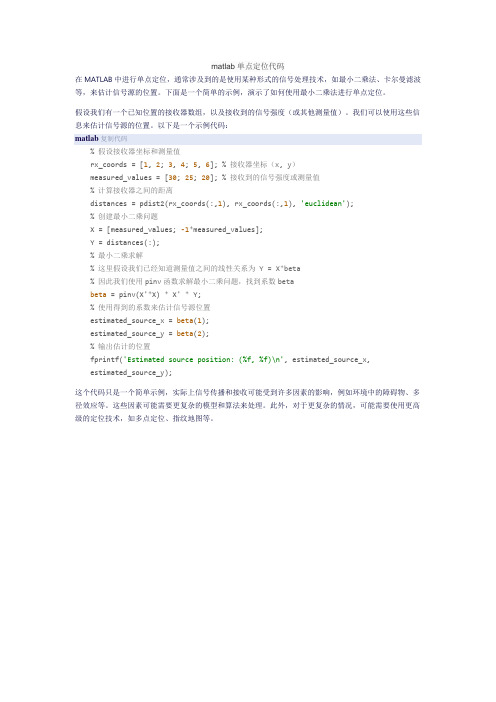
matlab单点定位代码在MATLAB中进行单点定位,通常涉及到的是使用某种形式的信号处理技术,如最小二乘法、卡尔曼滤波等,来估计信号源的位置。
下面是一个简单的示例,演示了如何使用最小二乘法进行单点定位。
假设我们有一个已知位置的接收器数组,以及接收到的信号强度(或其他测量值)。
我们可以使用这些信息来估计信号源的位置。
以下是一个示例代码:matlab复制代码% 假设接收器坐标和测量值rx_coords = [1, 2; 3, 4; 5, 6]; % 接收器坐标(x, y)measured_values = [30; 25; 20]; % 接收到的信号强度或测量值% 计算接收器之间的距离distances = pdist2(rx_coords(:,1), rx_coords(:,1), 'euclidean');% 创建最小二乘问题X = [measured_values; -1*measured_values];Y = distances(:);% 最小二乘求解% 这里假设我们已经知道测量值之间的线性关系为 Y = X*beta% 因此我们使用pinv函数求解最小二乘问题,找到系数betabeta = pinv(X'*X) * X' * Y;% 使用得到的系数来估计信号源位置estimated_source_x = beta(1);estimated_source_y = beta(2);% 输出估计的位置fprintf('Estimated source position: (%f, %f)\n', estimated_source_x,estimated_source_y);这个代码只是一个简单示例,实际上信号传播和接收可能受到许多因素的影响,例如环境中的障碍物、多径效应等。
这些因素可能需要更复杂的模型和算法来处理。
此外,对于更复杂的情况,可能需要使用更高级的定位技术,如多点定位、指纹地图等。
基于TDOA定位模型的Chan井下定位算法的改进

基于TDOA定位模型的Chan井下定位算法的改进作者:靳伟超马翠红杨友良来源:《物联网技术》2019年第01期摘要:针对因环境复杂多变,非视距及多径效应影响而导致井下定位精度低的问题,采用带宽宽,时间分辨率高,穿透能力强的UWB技术,基于到达时间差(TDOA)的定位方案,提出了一种Chan-UKF定位算法。
即将Chan算法取得的位置估计值作为UKF算法的初始值,对位置初估计进行二次估计。
通过Matlab仿真平台,在TDOA的测距误差标准差σ≤10 cm的情况下,Chan-UKF算法能将二维平面定位的均方根误差减小约50%。
仿真结果显示,Chan-UKF定位算法稳定性较好,能够有效降低定位误差,提高定位系统的精度。
关键词:井下定位;TDOA定位模型;Chan算法;无迹卡尔曼滤波中图分类号:TP271.5;TN409 文献标识码:A 文章编号:2095-1302(2019)01-00-040 引言为防止矿井事故的发生,国家安全生产监督管理总局于2010年颁布了《国务院关于进一步加强企业安全生产工作的通知》,要求各类矿山要严格制定和实施生产技术装备标准。
其中包括装备使用矿井人员定位系统[1]。
因脉冲超宽带(IR-UWB)抗信道衰减性低,频带资源丰富穿透能力强,时间分辨率高,抗多径效应明显等优势成为了井下定位技术的研究热点[2]。
矿井无线电信号传输受巷道分支、弯曲、倾斜、断面面积和形状、围岩介质、巷道表面粗糙度、支护、纵向导体(电缆、铁轨、水管等)、横向导体(工字钢支护等)设备等影响,信道环境复杂多变,多径效应及NLOS明显[2],对于基于观测信号到达角度(AOA)及接收检测信号强度(RSSI)的定位方法不适用于矿井人员的精确定位。
信号到达时间(TOA)、信号到达时间差(TDOA)充分利用了超宽带带宽和超高时间分辨率的特点,定位精度与信号发射设备与接收设备之间信号传输时间有关,受巷道等外部环境影响小,因此适合用于矿井人员精确定位[3]。
tdoa定位算法matlab代码
TDOA定位算法是一种基于时间差测量的定位方法,通过测量信号在不同接收节点的到达时间差来确定信号源的位置。
在实际应用中,TDOA定位算法可以用于无线定位、声纳定位等领域,具有广泛的应用前景。
为了实现TDOA定位算法,我们可以使用MATLAB编程语言进行算法实现。
下面将介绍如何利用MATLAB编写TDOA定位算法的代码,并给出具体的实现步骤。
一、获取信号到达时间差数据1.1 收集接收节点之间的信号到达时间差数据,包括信号源到各个接收节点的时间差信息。
1.2 对采集到的时间差数据进行预处理,包括去除异常值、滤波处理等,以确保数据的准确性和可靠性。
二、计算信号源位置2.1 构建TDOA定位算法的数学模型,根据信号到达时间差数据和接收节点的位置信息,建立定位问题的数学表达式。
2.2 利用MATLAB编程语言实现TDOA定位算法的数学模型,包括距离函数的定义、误差函数的构建等。
2.3 运用数值计算方法,如最小二乘法、非线性优化等,对定位问题进行求解,得到信号源的位置信息。
三、算法性能评估3.1 设计实验方案,生成合成数据或利用实际数据进行仿真实验。
3.2 对TDOA定位算法的性能进行评估,包括定位精度、计算速度、鲁棒性等方面的指标。
3.3 对算法的评估结果进行分析和讨论,找出算法的优点和不足之处,并提出改进方向。
通过以上步骤,我们可以实现TDOA定位算法的MATLAB代码,并对算法的性能进行评估和改进,从而更好地应用于实际系统中。
需要注意的是,在实际应用中,TDOA定位算法还需要考虑到信号传播模型、多径效应、多普勒效应等因素,进一步提高定位算法的准确性和鲁棒性。
也可以结合其他定位方法,如AOA定位、TOA定位等,进行多模式融合,提高定位系统的整体性能。
TDOA定位算法是一种基于时间差测量的定位方法,具有广泛的应用前景。
通过MATLAB编程实现TDOA定位算法的代码,并对算法的性能进行评估和改进,可以更好地应用于无线定位、声纳定位等实际系统中。
基于Chan的TDOA三维定位算法
[ = 一 [ 蔓 篆 襄 ] { [ 蓉 ] R + [ 霉 茎 三 茎 ] } c 4
当基站数 目 Ⅳ ≥5时, T D O A测量值的数 目大于 未知参数的数 目,可以采用加权最d ' , - - 乘法( WL S ) 来充分利用冗余的数据 , C h a n 算法能获得更加好 的 移动终端位置估计值 。此时先将初始非线性 T D O A 方程组转换为线性方程组 , 然后采用 WL S 得到初始
2 T D O A定位原 理与 C h a n算法
基于 T DO A 的定 位 系 统 中 , 一旦获得 T D O A 的
测量值 ,就可以得到移动终端到定位基站之间的距 解 ,再利用第一次得到的估计坐标及附加变量等 已 离差 ,多个测量值构成一组关于移动终端位置的双 知约束条件进行第二次 WL S 估计 , 从而得到改进 的 曲线方程组 , 求解该方程组就可以得 到 目 标 的估计 位置。 由于定位方程组是非线性的 , 而且 T D O A的测 量总存在误差 ,所 以定位问题就由求解非线性方程
,
—
a Z { ( hG ) T ’ l r 一 ( h — G n z a ) ) ( 6 )
-
与前面的分析和推倒类似 ,可 以得到含有移动 终端位置的未知量 Z 。 的解为:
a
=
, 、 ( G 一 G ) G h
,
—
,
z = ( G 、 l , 。 _ G ) G _ h
其中 , 为 误 差 矢 量 V 的 协 方 差 矩 阵
=
( 1 0 )
[ ’ I , ’ I , = B Q B [ 6 1 , Q为T D O A测量值的协方差矩
TDOA,AOA定位的扩展卡尔曼滤波定位算法Matlab源码

TDOA,AOA定位的扩展卡尔曼滤波定位算法Matlab源码TDOA/AOA定位的扩展卡尔曼滤波定位算法Matlab源码(2007-08-24 01:48:23) 标签:知识/探索function[MX,MY,SS]=ExtendedKalmanFilter(D1,D2,D3,A1,A2,A3,Flag1,FLAG2,S0,P0, SigmaR,SigmaAOA)%% TDOA/AOA定位的扩展卡尔曼滤波定位算法%% 输入参数列表% D1 基站1和移动台之间的距离% D2 基站2和移动台之间的距离% D3 基站3和移动台之间的距离% A1 基站1测得的角度值% A2 基站2测得的角度值% A3 基站3测得的角度值1×1矩阵,取值1,2,3,表明是以哪一个基站作为基准站计算TDOA数据的 % Falg1% FLAG2 N×3矩阵,取值0和1,每一行表示该时刻各基站的AOA是否可选择, % 1表示选择AOA数据,FLAG2并非人为给定,而是由LOS/NLOS检测模块确定% S0 初始状态向量,4×1矩阵% P0 预测误差矩阵的初始值,4×4的矩阵% SigmaR 无偏/有偏卡尔曼输出距离值的方差,由事先统计得到 % SigmaAOA 选择AOA数据的方差,生成AOA数据的规律已知,因此可以确定 %% 输出参数列表% MXM% Y%% 第一步:计算TDOA数据if Flag1==1TDOA1=D2-D1;TDOA2=D3-D1;elseif Flag1==2TDOA1=D1-D2;TDOA2=D3-D2;elseif Flag1==3TDOA1=D1-D3;TDOA2=D2-D3;elseerror('Flag1输入有误,它只能取1,2,3');end%% 第二步:构造两个固定的矩阵%构造状态转移矩阵ΦPhi=[1, 0,0.025, 0;0, 1, 0,0.025;0, 0, 1, 0;0, 0, 0, 1]; %构造W的协方差矩阵QSigmaU=0.00001;%噪声方差取很小的值Q=[0, 0, 0, 0;0, 0, 0, 0;0, 0,SigmaU, 0;0, 0, 0,SigmaU]; %% 第三步:输出数据初始化N=length(D1);MX=zeros(1,N);MY=zeros(1,N);MX(1)=S0(1);MY(1)=S0(2);SS=zeros(4,N);SS(:,1)=S0;%% 第四步:以下是迭代过程for i=2:NFlag2=FLAG2(i,:);%当前各信道环境的LOS/NLOS判据R=FunR(SigmaR,SigmaAOA,Flag2);%调用产生R矩阵的子函数S1=Phi*S0;%由状态方程得到的预测值H=FunH(S1,Flag1,Flag2);%调用产生H矩阵的子函数P1=Phi*P0*(Phi')+Q;%计算上述预测值的协方差矩阵K=P1*(H')*inv(H*P1*(H')+R);%计算滤波增益(加权系数)Z=FunZ(TDOA1,TDOA2,A1,A2,A3,SigmaR,SigmaAOA,Flag2,i);%调用构造观察向量的子函数hS1=FunhS1(S1,Flag1,Flag2);%调用构造观测值的估计值向量的子函数S2=S1+K*(Z-hS1);%加权得到滤波输出值%更新S0和P0P2=P1-K*H*P1;S0=S2;P0=P2;%记录滤波输出值MX(i)=S2(1);MY(i)=S2(2);SS(:,i)=S2;endfunction Z=FunZ(TDOA1,TDOA2,A1,A2,A3,SigmaR,SigmaAOA,Flag2,i) %调用构造观察向量的子函数m=sum(Flag2);Z=zeros(2+m,1);Z(1)=TDOA1(i);Z(2)=TDOA2(i);if Flag2(1)==0&&Flag2(2)==0&&Flag2(3)==0%空语句elseif Flag2(1)==1&&Flag2(2)==0&&Flag2(3)==0Z(3)=A1(i);elseif Flag2(1)==0&&Flag2(2)==1&&Flag2(3)==0Z(3)=A2(i);elseif Flag2(1)==0&&Flag2(2)==0&&Flag2(3)==1Z(3)=A3(i);elseif Flag2(1)==1&&Flag2(2)==1&&Flag2(3)==0Z(3)=A1(i);Z(4)=A2(i);elseif Flag2(1)==1&&Flag2(2)==0&&Flag2(3)==1Z(3)=A1(i);Z(4)=A3(i);elseif Flag2(1)==0&&Flag2(2)==1&&Flag2(3)==1Z(3)=A2(i);Z(4)=A3(i);elseif Flag2(1)==1&&Flag2(2)==1&&Flag2(3)==1Z(3)=A1(i);Z(4)=A2(i);Z(5)=A3(i);elseerror('Flag2格式不正确,它的元素只能取0或者1'); endfunction R=FunR(SigmaR,SigmaAOA,Flag2)%% 产生R矩阵的子函数m=sum(Flag2);B=[-1,1,0;-1,0,1];R11=B*[SigmaR,0,0;0,SigmaR,0;0,0,SigmaR]*(B');R12=zeros(2,m);R21=zeros(m,2);if m==0R22=[];elseif m==1R22=SigmaAOA;elseif m==2R22=[SigmaAOA, 0;0,SigmaAOA]; elseif m==3R22=[SigmaAOA, 0, 0;0,SigmaAOA, 0;0, 0,SigmaAOA];elseerror('Flag2格式不正确,它的元素只能取0或者1'); end R=[R11,R12;R21,R22];function hS1=FunhS1(S1,Flag1,Flag2)%% 构造观测值的估计值向量的子函数%提取估计的移动台坐标x=S1(1);y=S1(2);%三个基站的横纵坐标x1=0;y1=0;x2=5;y2=8.66;x3=10;y3=0;%计算移动台到三个基站的距离(估计值)d1=((x-x1)^2+(y-y1)^2)^0.5;d2=((x-x2)^2+(y-y2)^2)^0.5;d3=((x-x3)^2+(y-y3)^2)^0.5;M=2+sum(Flag2);hS1=zeros(M,1);if Flag1==1%以第一个基站为基准计算TDOA数据hS1(1)=d2-d1;hS1(2)=d3-d1;elseif Flag1==2%以第二个基站为基准计算TDOA数据hS1(1)=d1-d2;hS1(2)=d3-d2;elseif Flag1==3%以第三个基站为基准计算TDOA数据hS1(1)=d1-d3;hS1(2)=d2-d3;elseerror('Flag1格式不正确,它只能取1,2,3');endh1=atan2(y-y1,x-x1);h2=atan2(y-y2,x-x2);h3=atan2(y-y3,x-x3);if Flag2(1)==0&&Flag2(2)==0&&Flag2(3)==0%空语句elseif Flag2(1)==1&&Flag2(2)==0&&Flag2(3)==0hS1(3)=h1;elseif Flag2(1)==0&&Flag2(2)==1&&Flag2(3)==0hS1(3)=h2;elseif Flag2(1)==0&&Flag2(2)==0&&Flag2(3)==1hS1(3)=h3;elseif Flag2(1)==1&&Flag2(2)==1&&Flag2(3)==0hS1(3:4)=[h1;h2];elseif Flag2(1)==1&&Flag2(2)==0&&Flag2(3)==1hS1(3:4)=[h1;h3];elseif Flag2(1)==0&&Flag2(2)==1&&Flag2(3)==1hS1(3:4)=[h2;h3];elseif Flag2(1)==1&&Flag2(2)==1&&Flag2(3)==1hS1(3:5)=[h1;h2;h3];elseerror('Flag2格式不正确,它的元素只能取0或者1'); end。
TDOA定位的Chan算法MATLAB源代码
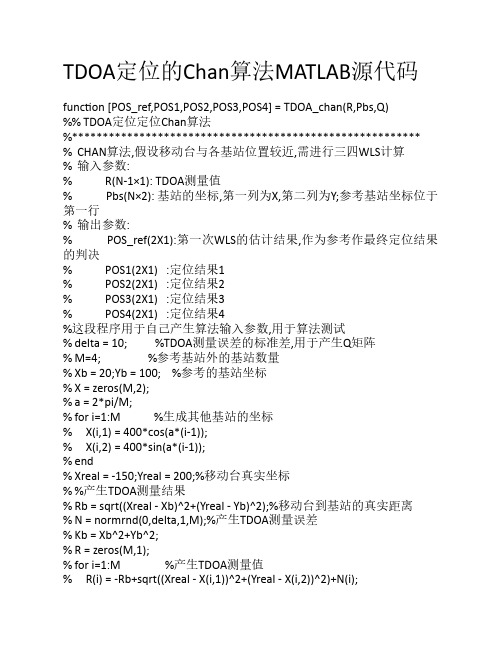
TDOA定位的Chan算法MATLAB源代码func on [POS_ref,POS1,POS2,POS3,POS4] = TDOA_chan(R,Pbs,Q)%% TDOA定位定位Chan算法%*********************************************************% CHAN算法,假设移动台与各基站位置较近,需进行三四WLS计算% 输入参数:% R(N-1×1): TDOA测量值% Pbs(N×2): 基站的坐标,第一列为X,第二列为Y;参考基站坐标位于第一行% 输出参数:% POS_ref(2X1):第一次WLS的估计结果,作为参考作最终定位结果的判决% POS1(2X1) :定位结果1% POS2(2X1) :定位结果2% POS3(2X1) :定位结果3% POS4(2X1) :定位结果4%这段程序用于自己产生算法输入参数,用于算法测试% delta = 10; %TDOA测量误差的标准差,用于产生Q矩阵% M=4; %参考基站外的基站数量% Xb = 20;Yb = 100; %参考的基站坐标% X = zeros(M,2);% a = 2*pi/M;% for i=1:M %生成其他基站的坐标% X(i,1) = 400*cos(a*(i-1));% X(i,2) = 400*sin(a*(i-1));% end% Xreal = -150;Yreal = 200;%移动台真实坐标% %产生TDOA测量结果% Rb = sqrt((Xreal - Xb)^2+(Yreal - Yb)^2);%移动台到基站的真实距离% N = normrnd(0,delta,1,M);%产生TDOA测量误差% Kb = Xb^2+Yb^2;% R = zeros(M,1);% for i=1:M %产生TDOA测量值% R(i) = -Rb+sqrt((Xreal - X(i,1))^2+(Yreal - X(i,2))^2)+N(i);% end% Q = (0.5*eye(M)+0.5*ones(M))*(delta^2);% Pbs = [Xb Yb;X];% N = 5;% [POS_ref POS1 POS2 POS3 POS4] = TDOA_chan(R,Pbs,Q)N = size(Pbs,1);K = zeros(1,N);K = Pbs(:,1).^2 + Pbs(:,2).^2;ha = 0.5*(R.^2-K(2:N)+K(1))Ga = -[Pbs(2:N,1)-Pbs(1,1) Pbs(2:N,2)-Pbs(1,2) R]%计算第一次WLS估计结果(远距算法)Za = inv(Ga.'*inv(Q)*Ga)*Ga.'*inv(Q)*ha;Ba = diag(Va);Fa = Ba*Q*Ba;Zacov = inv(Ga.'*inv(Fa)*Ga);%第一次WLS计算(近距算法)Va2 = sqrt((Za2(1)-Pbs(2:N,1)).^2+(Za2(2)-Pbs(2:N,2)).^2);Ba2 = diag(Va2);Fa2 = Ba2*Q*Ba2;Zacov2 = inv(Ga.'*inv(Fa2)*Ga);%第二次WLS计算(近距算法)Gb = [1 0;0 1;1 1];Bb2 = [Za2(1)-Pbs(1,1) 0 0;0 Za2(2)-Pbs(1,2) 0;0 0 sqrt((Za2(1)-Pbs(1,1))^2+ (Za2(2)-Pbs(1,2))^2)];Fb2 = 4*Bb2*Zacov2*Bb2;POS_ref = Za2(1:2,1); %第一次WLS的估计结果,作为参考作最终定位结果的判决POS1 = sqrt(Zb2)+Pbs(1,:).'; %定位结果1POS2 = -sqrt(Zb2)+Pbs(1,:).';%定位结果2POS3 = [-sqrt(Zb2(1));sqrt(Zb2(2))]+Pbs(1,:).';%定位结果3POS4 = [sqrt(Zb2(1));-sqrt(Zb2(2))]+Pbs(1,:).';%定位结果4源代码运行结果展示037附图1.emf。
一种基于TOA定位的CHAN改进算法
一种基于TOA定位的CHAN改进算法
杨天池;金梁;程娟
【期刊名称】《电子学报》
【年(卷),期】2009(037)004
【摘要】本文提出了一种基于TOA参数的CHAN改进定位算法.首先利用坐标平移的方法,消除定位方程中的未知参数,得到移动台位置的一次估计;其次通过对一次定位结果误差的分析表明基站的几何位置结构和到达距离对定位误差具有不同的"贡献"度,依据"贡献"度大小的不同,对大"贡献"度采用小权值而对小"贡献"度采用大权值的原则,提出了虚拟基站的方法来减小系统的总体误差,从而提高定位精度.仿真结果验证了本文算法的有效性.
【总页数】4页(P819-822)
【作者】杨天池;金梁;程娟
【作者单位】国家数字交换系统工程技术研究中心,河南,郑州,450002;国家数字交换系统工程技术研究中心,河南,郑州,450002;解放军信息工程大学信息工程学院,河南,郑州,450002
【正文语种】中文
【中图分类】TN929.533
【相关文献】
1.基于TDOA定位模型的Chan井下定位算法的改进 [J], 靳伟超;马翠红;杨友良
2.基于改进Chan算法和多元Taylor算法的室内定位方法 [J], 陈大伟;钱路雁;陈
诗军;金玲飞;李俊强
3.基于改进Chan算法和多元Taylor算法的室内定位方法 [J], 陈大伟;钱路雁;陈诗军;金玲飞;李俊强
4.基于Chan的UWB室内定位算法改进 [J], 柏雨晨
5.一种基于单次散射体定位的TOA/AOA混合定位算法 [J], 谢雪;王浩祥;邓平因版权原因,仅展示原文概要,查看原文内容请购买。
matlab编程定位方法

matlab编程定位方法
在MATLAB中,可以使用多种方法进行定位,这取决于你想要解决的具体
问题。
下面是一些基本的定位方法:
1. 二维图像定位:对于在二维图像中的目标定位,可以使用边缘检测、特征提取、模板匹配等技术。
例如,使用 `edge` 函数进行边缘检测,使用
`regionprops` 函数提取区域属性,使用 `immatch` 函数进行模板匹配等。
2. 三维空间定位:对于三维空间中的目标定位,可能需要结合多个传感器(如GPS、IMU、轮速传感器等)的数据。
这通常涉及到数据融合和卡尔曼滤波等技术。
3. 声音定位:对于声音定位,可以使用声波传播模型和阵列处理技术。
例如,使用 `audioread` 函数读取声音信号,使用 `beamform` 函数进行波束形成等。
4. 机器人定位:在机器人定位中,可以使用 SLAM(Simultaneous Localization and Mapping)技术。
MATLAB 提供了一些工具箱,如Robotics System Toolbox,可以帮助实现这一目标。
5. 雷达/激光雷达定位:对于雷达或激光雷达数据,可以使用点云处理技术。
MATLAB 的Point Cloud Processing Toolbox 可以提供一些基本的工具。
以上只是一些基本的定位方法,具体的实现会根据你的具体需求和数据类型有所不同。
如果你能提供更具体的信息(如数据类型、目标特性、应用场景等),我可以给出更详细的建议。
chan算法-代码(数学建模)
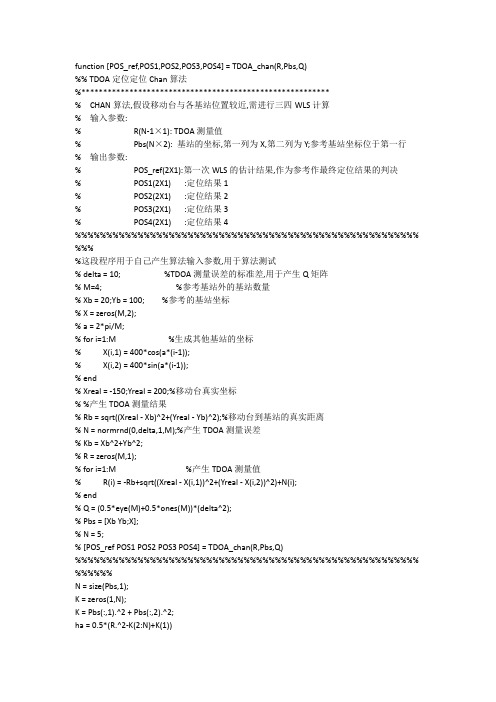
function [POS_ref,POS1,POS2,POS3,POS4] = TDOA_chan(R,Pbs,Q)%% TDOA定位定位Chan算法%*********************************************************% CHAN算法,假设移动台与各基站位置较近,需进行三四WLS计算% 输入参数:% R(N-1×1): TDOA测量值% Pbs(N×2): 基站的坐标,第一列为X,第二列为Y;参考基站坐标位于第一行% 输出参数:% POS_ref(2X1):第一次WLS的估计结果,作为参考作最终定位结果的判决% POS1(2X1) :定位结果1% POS2(2X1) :定位结果2% POS3(2X1) :定位结果3% POS4(2X1) :定位结果4 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%这段程序用于自己产生算法输入参数,用于算法测试% delta = 10; %TDOA测量误差的标准差,用于产生Q矩阵% M=4; %参考基站外的基站数量% Xb = 20;Yb = 100; %参考的基站坐标% X = zeros(M,2);% a = 2*pi/M;% for i=1:M %生成其他基站的坐标% X(i,1) = 400*cos(a*(i-1));% X(i,2) = 400*sin(a*(i-1));% end% Xreal = -150;Yreal = 200;%移动台真实坐标% %产生TDOA测量结果% Rb = sqrt((Xreal - Xb)^2+(Yreal - Yb)^2);%移动台到基站的真实距离% N = normrnd(0,delta,1,M);%产生TDOA测量误差% Kb = Xb^2+Yb^2;% R = zeros(M,1);% for i=1:M %产生TDOA测量值% R(i) = -Rb+sqrt((Xreal - X(i,1))^2+(Yreal - X(i,2))^2)+N(i);% end% Q = (0.5*eye(M)+0.5*ones(M))*(delta^2);% Pbs = [XbYb;X];% N = 5;% [POS_ref POS1 POS2 POS3 POS4] = TDOA_chan(R,Pbs,Q) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%N = size(Pbs,1);K = zeros(1,N);K = Pbs(:,1).^2 + Pbs(:,2).^2;ha = 0.5*(R.^2-K(2:N)+K(1))Ga = -[Pbs(2:N,1)-Pbs(1,1) Pbs(2:N,2)-Pbs(1,2) R]%计算第一次WLS估计结果(远距算法)Za = inv(Ga.'*inv(Q)*Ga)*Ga.'*inv(Q)*ha;Ba = diag(Va);Fa = Ba*Q*Ba;Zacov = inv(Ga.'*inv(Fa)*Ga);%第一次WLS计算(近距算法)Va2 = sqrt((Za2(1)-Pbs(2:N,1)).^2+(Za2(2)-Pbs(2:N,2)).^2);Ba2 = diag(Va2);Fa2 = Ba2*Q*Ba2;Zacov2 = inv(Ga.'*inv(Fa2)*Ga);%第二次WLS计算(近距算法)Gb = [1 0;0 1;1 1];Bb2 = [Za2(1)-Pbs(1,1) 0 0;0 Za2(2)-Pbs(1,2) 0;0 0 sqrt((Za2(1)-Pbs(1,1))^2+(Za2(2)-Pbs(1,2))^2)]; Fb2 = 4*Bb2*Zacov2*Bb2;POS_ref = Za2(1:2,1); %第一次WLS的估计结果,作为参考作最终定位结果的判决POS1 = sqrt(Zb2)+Pbs(1,:).'; %定位结果1POS2 = -sqrt(Zb2)+Pbs(1,:).';%定位结果2POS3 = [-sqrt(Zb2(1));sqrt(Zb2(2))]+Pbs(1,:).';%定位结果3POS4 = [sqrt(Zb2(1));-sqrt(Zb2(2))]+Pbs(1,:).';%定位结果4。
Chan算法在TDOA三维定位系统应用性能研究

Chan算法在TDOA三维定位系统应用性能研究作者:明华刘璟李志咏周新宇来源:《科学与信息化》2019年第06期摘要针对发电厂内三维定位的需求,对Chan算法应用TDOA三维定位系统的性能进行了分析,选取均方根误差(RMSE)为评价指标,进行了基站最优个数的仿真研究。
在对Chan 算法定位性能与基站数目关系仿真分析基础上,构建了一套UWB-TDOA定位系统进行验证,仿真和实验结果表明:论文提出的5基站定位系统能够满足实际定位需求。
关键词超宽带;Chan算法;TDOA;三维定位引言UWB(Ultra Wide Band)技术是一种新型无线通信技术。
该技术通过对具有很陡上升和下降时间的冲激脉冲进行直接调制,使信号具有GHz量级的带宽[1],非常适用于室内定位。
按照测量参数的不同,UWB定位方法主要有基于信号到达时间的定位方法(TOA)和基于信号到达时间差的定位方法(TDOA)[2]。
TDOA与TOA定位精度相当,但其定位过程中无须待测标签与基站间的同步,只需各基站间的时钟同步,这大大降低了同步难度[6]。
综合定位精度、功耗以及容量等方面的考虑[7],本文采用TDOA三维定位方法来实现室内定位。
当信噪比比较高时,TDOA的测量误差服从高斯分布[8],为了解决这个问题,Y.T.Chan 提出了一个使用两步最大似然估计来计算目标位置的算法,即Chan算法[9]。
本文结合电厂三维定位实际需求,对Chan算法应用TDOA三维算法中的定位精度与基站数目进行分析和仿真,并基于UWB系统与基站进行实验验证。
1 基于Chan的三维定位算法研究1.1 Chan算法Chan算法[10]是一种具有解析表达式的非递归双曲线方程组的TDOA位置估计算法。
该算法具体过程如下:假设三维空间中待测标签的位置坐标为,随机分布有N个定位基站且基站坐标已知,选定基站1作为主基站,主基站坐标作为原点,其他各基站作为从基站,各基站坐标为。
从基站相对主基站接收标签信号的时间差记为,标签到达第个基站的距离为,则有:其中,当基站数目时,得到的TDOA测量信息大于标签未知参数的个数,可以充分利用冗余的测量信息来提高定位的精度。
室内定位chan氏算法的python实现
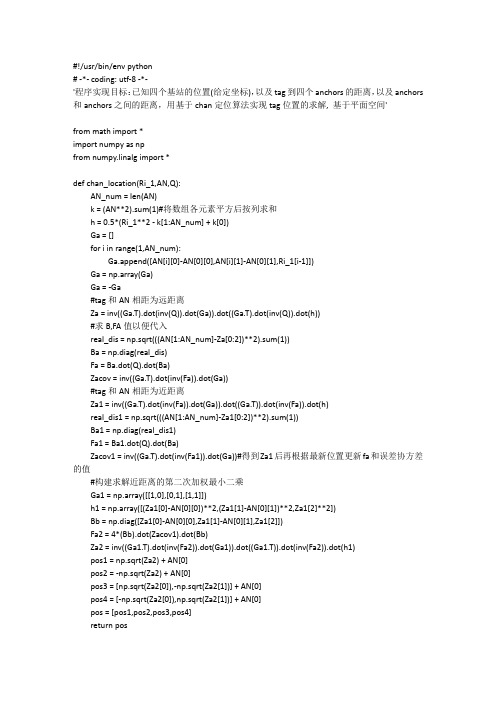
#!/usr/bin/env python# -*- coding: utf-8 -*-'程序实现目标:已知四个基站的位置(给定坐标),以及tag到四个anchors的距离,以及anchors 和anchors之间的距离,用基于chan定位算法实现tag位置的求解, 基于平面空间'from math import *import numpy as npfrom numpy.linalg import *def chan_location(Ri_1,AN,Q):AN_num = len(AN)k = (AN**2).sum(1)#将数组各元素平方后按列求和h = 0.5*(Ri_1**2 - k[1:AN_num] + k[0])Ga = []for i in range(1,AN_num):Ga.append([AN[i][0]-AN[0][0],AN[i][1]-AN[0][1],Ri_1[i-1]])Ga = np.array(Ga)Ga = -Ga#tag和AN相距为远距离Za = inv((Ga.T).dot(inv(Q)).dot(Ga)).dot((Ga.T).dot(inv(Q)).dot(h))#求B,FA值以便代入real_dis = np.sqrt(((AN[1:AN_num]-Za[0:2])**2).sum(1))Ba = np.diag(real_dis)Fa = Ba.dot(Q).dot(Ba)Zacov = inv((Ga.T).dot(inv(Fa)).dot(Ga))#tag和AN相距为近距离Za1 = inv((Ga.T).dot(inv(Fa)).dot(Ga)).dot((Ga.T)).dot(inv(Fa)).dot(h)real_dis1 = np.sqrt(((AN[1:AN_num]-Za1[0:2])**2).sum(1))Ba1 = np.diag(real_dis1)Fa1 = Ba1.dot(Q).dot(Ba)Zacov1 = inv((Ga.T).dot(inv(Fa1)).dot(Ga))#得到Za1后再根据最新位置更新fa和误差协方差的值#构建求解近距离的第二次加权最小二乘Ga1 = np.array([[1,0],[0,1],[1,1]])h1 = np.array([(Za1[0]-AN[0][0])**2,(Za1[1]-AN[0][1])**2,Za1[2]**2])Bb = np.diag([Za1[0]-AN[0][0],Za1[1]-AN[0][1],Za1[2]])Fa2 = 4*(Bb).dot(Zacov1).dot(Bb)Za2 = inv((Ga1.T).dot(inv(Fa2)).dot(Ga1)).dot((Ga1.T)).dot(inv(Fa2)).dot(h1)pos1 = np.sqrt(Za2) + AN[0]pos2 = -np.sqrt(Za2) + AN[0]pos3 = [np.sqrt(Za2[0]),-np.sqrt(Za2[1])] + AN[0]pos4 = [-np.sqrt(Za2[0]),np.sqrt(Za2[1])] + AN[0]pos = [pos1,pos2,pos3,pos4]return posif __name__ == "__main__":delta = 10AN = []AN1 = (20,100)AN.append(AN1)tag = (100,100)AN_num = 4a = 2*pi/AN_numtag_AN1_dis = sqrt((AN1[0]-tag[0])**2 + (AN1[1]-tag[1])**2)#AN1与tag的距离print(tag_AN1_dis)for i in range(1,AN_num):AN.append((400*cos(a*(i-1)),400*sin(a*(i-1))))AN = map(list, AN)#整体映射功能,能将列表或者元组转化为每个元素都为列表样式的列表AN = np.array(AN)Q = (0.5*np.eye(AN_num-1) + 0.5*np.ones((AN_num-1,AN_num-1)))*(delta**2)#AN = np.matrix(AN)tdoa_dis = []Nerror = np.random.normal(0,delta,AN_num-1)#产生随机误差for i in range(1,AN_num):tdoa_dis.append(sqrt((AN[i][0]-tag[0])**2 + (AN[i][1]-tag[1])**2)-tag_AN1_dis + Nerror[i-1])Ri_1 = np.array(tdoa_dis)pos = chan_location(Ri_1,AN,Q)print(pos)#最终对比,从四个中选出一个正确的定位点。
Matlab车牌定位程序源代码
Matlab 车牌定位程序源代码clear;clc; close all;chos=0; possibility=9;while chos~=possibility,chos=menu('车牌定位系统','载入图片’,'二值化','边缘化','腐蚀','连通','滤波',...'定位','倾斜校正','退出');if chos==1, clc;[namefile,pathname]=uigetfile('*.jpg','Select image');if namefile~=0I=imread(strcat(pathname,namefile));imshow(I);endif chos==2,I1=rgb2gray(I);imshow(I1);endif chos==3,I2=edge(I1,'robert',0.15,'both'); imshow(I2);endif chos==4,se=[1;1;1];I3=imerode(I2,se);imshow(I3);endif chos==5, se=strel('rectangle',[25,25]); I4=imclose(I3,se);imshow(I4);endif chos==6,I5=bwareaopen(I4,2000); imshow(I5);[y,x,z]=size(I5);myI=I5;endif chos==7, %%%%%%%%%%% 统计分析%%%%%%%%%%%%%%%%%%%%%%% Y 方向%%%%%%%%%% whitr_y=zeros(y,1);for i=1:yfor j=1:xif(myI(i,j,1)==1) % 白色RGB 的灰度范围whitr_y(i,1)= whitr_y(i,1)+1; % 白色象素点统计endend%%%%%%%%%%叵板X%%%%%%%%=■ ■cxr A d =A d )llA -pu①H +(N A d H (N A d((A V (N A d )0303(9H A (L7Ad)A —」壬M))①Z M>xel/\IH(NAdpu ①TLAdHLAd((L ALA d )0303(9H A ( L ・LAd)A —」壬 M))①Z MAxelAIHLAd((X V L x d )0303o v (LXd・L)x —」壬 M))HHLXdpu①pu①pu ①H+(rL)xl 」±M""r L x l b z M(LH H(L:=P )_AE M(NAdtAd上」3J G LPX1=PX1+1;endPX2=x;while ((whitr_x(1,PX2)<3)&&(PX2>PX1))PX2=PX2-1;endPlate=I(PY1-13:PY2+13,PX1-5:PX2+5,:);% 预留多些利于倾斜校正% t=toc % 读取计时imshow(Plate);end if chos==8,I=Plate;level = graythresh(I); I = im2bw(I,level);%倾斜矫正myI=edge(I,'sobel');theta=0:179;[r1,x1]=radon(myI,theta); R1=sort(r1,'descend');[x,y]=size(R1);R=R1(1:10,:);R=sum(R);a=0.4;E(1)=R(1);for i=2:length(R)E(i)=a*R(i)+(1-a)*E(i-1);enda=tan((91-(find(E==max(E))))*pi/180);I=imrotate(I,a);imshow(I);%水平方向倾斜矫正Rfilter=0; Lfilter=0;for j=alpha+10:length(E)-1if (E(j)<=200)&&(E(j)<E(j-1))&&(E(j)<=E(j+1))Rfilter=j;endendfor j=2:alpha-10if(E(j)<=200)&&(E(j)<E(j-1))&&(E(j)<=E(j+1))Lfilter=j;endend E(Lfilter:Rfilter)=min(E(Lfilter),E(Rfilter));for i=2:179 if(E(i)>=200)&&(E(i)>E(i-1))&&(E(i)>=E(i+1))beta=i;elsebeta=0;endendif alpha>91;a=-tan(beta);else a=tan(beta); end tform=maketform('affine',[1 0 0;a1 0;0 0 1]); goal=imtransform(I,tform,'bicubic');%垂直方向矫正if mean(goal)>0.5 goal=~goal;end imshow(goal(15:end-14,11:end-10));end。
基于TDOA的chan算法(定位算法)

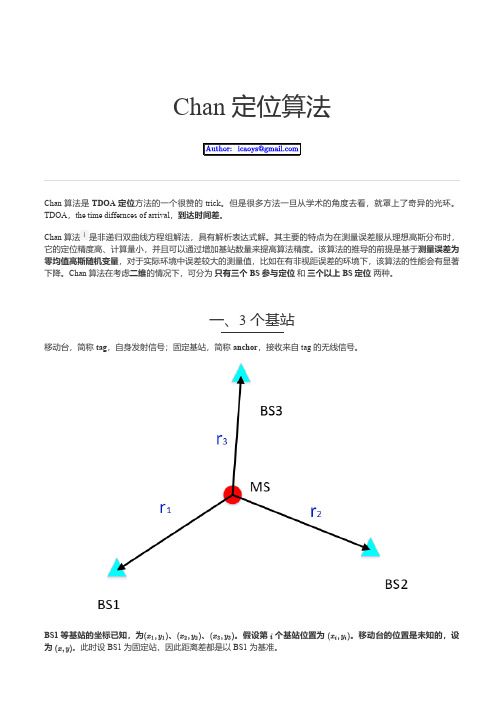
基于TDOA的chan算法(定位算法)Chan算法原理TDOA(TDOA,the time differences of arrival,到达时间差),Chan算法是TDOA定位方法的一个很好用的方法。
Chan算法是非递归双曲线方程组解法,具有解析表达式解,主要特点是:在测量误差服从理想高斯分布时,它的定位精度高、计算量小,并且可以通过增加已确定点的数量来提高算法精度。
该算法的推导前提是基于测量误差为零均值高斯随机变量,对于实际环境中误差较大的测量值,比如在有非视距误差的环境下,该算法的性能会有显著下降。
二维情况下,可分为只有三个点参与定位和三个点以上参与定位。
已知坐标 ( x 1 , y1 ) , ( x2 , y 2 ) , ( x3 , y 3 ) (x_1, y_1), (x_2, y_2), (x_3, y_3) (x1,y1),(x2,y2),(x3,y3),假设第未知点的坐标是 ( x , y ) (x, y) (x,y)根据几何关系定义一下关系表达式:r i = ( x i − x ) 2 + ( y i − y ) 2 r_i =\sqrt{(x_i-x)^2+(y_i-y)^2} ri=(xi−x)2+(yi−y)2... ... ... ( 1 ) \dots\dots\dots(1) (1)r i , 1 = r i − r 1 = ( x i − x ) 2 + ( y i − y ) 2 − ( x 1 − x ) 2 + ( y 1 − y ) 2 r_{i,1}=r_i-r_1=\sqrt{(x_i-x)^2+(y_i-y)^2}-\sqrt{(x_1-x)^2+(y_1-y)^2} ri,1=ri−r1=(xi−x)2+(yi−y)2−(x1−x)2+(y1−y)2... ... ... ( 2 ) \dots\dots\dots(2) (2)根据(1)另有如下关系:先令 K i = x i 2 + y i 2K_i=x_i^2+y_i^2 Ki=xi2+yi2r i 2 = x i 2 + y i 2 = K i − 2 x i x − 2 y i y + x 2 + y 2 r_i^2=x_i^2+y_i^2=K_i-2x_ix-2y_iy+x^2+y^2 ri2 =xi2+yi2=Ki−2xix−2yiy+x2+y2 … … … ( 3 )\dots\dots\dots(3) (3)根据(2)另外有如下关系:r i 2 = ( r i , 1 + r i ) 2 r_i^2=(r_{i,1}+r_i)^2 ri2 =(ri,1+ri)2 ... ... ... ( 4 ) \dots\dots\dots(4) (4)将(3)代入(4)可推出如下关系(关键):r i , 1 2 + 2 r i , 1 r 1 = x i 2 + y i 2 − 2 x i x − 2 y i y + 2 x 1 x + 2 y 1 y − ( x 1 2 + y 1 2 ) = r i 2 − r 1 2 r_{i,1}^2+2r_{i,1}r_1=x_i^2+y_i^2-2x_ix-2y_iy+2x_1x+2y_1y-(x_1^2+y_1^2)=r_i^2-r_1^2ri,12+2ri,1r1=xi2+yi2−2xix−2yiy+2x1x+2y1y−(x12+y12 )=ri2−r12 ... ... ... ( 5 ) \dots\dots\dots(5) (5)进一步,令 x i , 1 = x i − x 1 x_{i,1}=x_i-x_1 xi,1=xi−x1,有r i , 1 2 + 2 r i , 1 r 1 = ( K i − K 1 ) − 2 x i , 1 x − 2 y i , 1 y r_{i,1}^2+2r_{i,1}r_1=(K_i-K_1)-2x_{i,1}x-2y_{i,1}y ri,12+2ri,1r1=(Ki−K1)−2xi,1x−2yi,1y这里(5)是关键一步:消除了未知数的平方项,仅保留一系列的线性方程。
基于TDOA的高精度无线定位算法分析与实现
基于TDOA的高精度无线定位算法分析与实现孔维炯;丁志中;方福柱【摘要】文章根据移动应用需求,推导三维空间最小二乘(least square,LS)算法、Taylor级数展开法和查恩(Chan)算法3种经典到达时间差(time difference of arrival,TDOA)算法求解过程,通过仿真模拟分析3种算法的不同特点,确定移动定位场景下的最佳算法.为了进一步提高定位精度,采用Kalman滤波中递推估计思想,减小噪声干扰产生的误差,提升到达时间(time of arrival,TOA)测距精度,进而获得三维空间中性能优良的TDOA算法.测试试验表明,改进后的Chan算法有效且性能优良,定位误差最大为10~30 cm.【期刊名称】《合肥工业大学学报(自然科学版)》【年(卷),期】2019(042)006【总页数】7页(P756-762)【关键词】定位;到达时间差(TDOA);最小二乘;泰勒级数扩展;Chan算法;Kalman 滤波【作者】孔维炯;丁志中;方福柱【作者单位】合肥工业大学计算机与信息学院 ,安徽合肥 230601;合肥工业大学计算机与信息学院 ,安徽合肥 230601;合肥工业大学计算机与信息学院 ,安徽合肥 230601【正文语种】中文【中图分类】TN929.53目前,广泛使用的定位技术和方法主要有卫星定位、手机蜂窝网定位及Wi-Fi定位。
它们的共同特点是利用已存在的无线网实现定位,各系统中的卫星、手机基站、Wi-Fi无线路由器在定位中充当着锚节点(anchor)的角色,提供位置计算的已知点坐标,待测节点(又称“tag节点”)处于多个anchor所确定的二维平面或三维空间中,从而定位待测节点坐标,且定位精度在米级以上。
然而,在某些应用场景使用上述定位技术是不可行的。
例如,高速公路过山隧道中行驶的车辆定位场景,会发生无法接收或者难以接收卫星定位信号、手机蜂窝信号或Wi-Fi信号的情况;机器人操作的仓储系统中的定位,要求定位精度达到厘米级。
Chan算法和Taylor级数混合算法的微震源定位方法研究_杨俊峰

子
测
试
Chan 算法和 Taylor 级数混合算法的微震源定位方法研究
(中北大学 电子测量技术国家重点实验室, 山西 太原 030051)
摘要 : 在震源定位中, 提高定位精度是工程研究的重点。 结合 Chan 算法和泰勒级数展开法的优点, 提出了一种基于 Chan 算 法初值选取与泰勒级数展开法精确迭代的震源定位方法。 该算法充分发挥了 Chan 算法初值估计性好和泰勒级数展开法收敛 速度快的优点, 将 Chan 算法的定位结果作为 Taylor 级数展开法的初始值。 仿真结果表明, 在参数设置合理的前提下, 相比 Chan 算法和泰勒级数展开法, 该混合算法性能稳定且定位精度高于 Chan 算法与泰勒级数展开法。 关键词 : 震源定位 ; Chan ; 泰勒级数 ; 定位精度 中图分类号 : TP391.9 文献标识码 : A
在基站位置布置合适条件下, 使 rank (A)=3, 用 T -1 T 伪逆法可求的震源位置估计值 : X= (A A) A F 3.2 泰勒级数展开法定位算法 [1,3,7,8] 泰勒级数展开法是一种递归算法, 每一步迭代方 向都是沿着当前点函数值下降的方向。 因此, 初始值 的选取对算法的收敛情况至关重要, 根据泰勒级数展 开法的条件, 将所建立震源定位模型转换为 :
2
震源定位原理
对震源进行定位, 实质上是一种无源定位技术, 采用多站侧向交叉的方法来实现对震源的定位。 震源 定位系统的每个基站通常由长基线组成, 接收基站由 4 个以上接收传感器阵元按某种几何关系进行布阵。
r02 = ( x − x1 ) 2 + ( y − y1 ) 2 + ( z − z1 ) 2 2 2 2 2 ri = ( x − xi ) + ( y − yi ) + ( z − zi ) r = r − r = ct i0 i0 i 0 (1)
Chan 定位算法
根据几何关系我们定义以下要用的关系表达式:根据另外有如下关系:根据另外有如下关系:将代入,则有:在这里是关键一步:消除了未知数的平方项,仅保留一次项,得到了一系列的线性方程组。
比如当时,有如下表达式:分析,首先要明确,,已知,未知项有,,。
首先假设是已知的。
则可以视作线性方程组求解。
因为是二元一次方程组,因此可以直接利用消元法来求解。
首先可以通过移项化简为:再简记为:在这里可以视为,即。
可以利用矩阵的逆即,也可以利用如下的行列式除法。
最后求得:其中,。
将,代入可得:对于进一步处理得:其中,我们令:利用我们就可以将表示为如下非常简洁的形式:其中,只有是未知的。
因此要想求出 MS 的坐标,由式可知,首先要求出。
接下来我们将式代入到式,可以化为如下形式:式是以的一元二次方程。
求解式可得的两个根,根据先验信息可以舍去一个无效的根,将有效的代回到式 (13) 可求可求出 MS 的估计坐标。
% 求解一元二次方程syms r;r0 = solve(a*r^2+b*r+c); % 默认 eqx=0% select the ture 'r0', then solve the x & y.二、多个基站Chan 算法是基于双曲线交点的定位方法,闭合解/解析解,小范围和大范围的定位系统都适用。
当 TDOA 估计误差较小时,可以认为是 ML(最大似然法)的一种近似方法。
当基站的数量大于 3 时,TDOA 值得到的非线性方程组个数要多于未知变量的个数。
采用加权最小二乘法(WLS)来充分利用冗余的数据,Chan 算法能获得更加好的 MS 位置估计值。
此时先将初始非线性 TDOA 方程组转换为线性方程组,然后采用 WLS 得到初始解,再利用第一次得到的估计坐标及附加变量等已知约束条件进行第二次 WLS 估计,从而得到改进的估计坐标。
2.1 问题建模当有更多的 anchor 时,线性方程组便是超定的。
由于测量噪声的存在,方程组的解不可能完全满足其中的所有方程,所以合适的解只能是匹配这些方程组的最佳解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TDOA定位的Chan算法MATLAB源代码Chan算法是解决TDOA定位的经典算法,被众多的论文所引用。
function [POS_ref,POS1,POS2,POS3,POS4] = TDOA_chan(R,Pbs,Q)
%% TDOA定位定位Chan算法
% GreenSim团队——专业级算法设计&代写程序
% 欢迎访问GreenSim团队主页→/greensim
%*********************************************************
% CHAN算法,假设移动台与各基站位置较近,需进行三四WLS计算
% 输入参数:
% R(N-1×1): TDOA测量值
% Pbs(N×2): 基站的坐标,第一列为X,第二列为Y;参考基站坐标位于第一行% 输出参数:
% POS_ref(2X1):第一次WLS的估计结果,作为参考作最终定位结果的判决% POS1(2X1) :定位结果1
% POS2(2X1) :定位结果2
% POS3(2X1) :定位结果3
% POS4(2X1) :定位结果4
%这段程序用于自己产生算法输入参数,用于算法测试
% delta = 10; %TDOA测量误差的标准差,用于产生Q矩阵
% M=4; %参考基站外的基站数量
% Xb = 20;Yb = 100; %参考的基站坐标
% X = zeros(M,2);
% a = 2*pi/M;
% for i=1:M %生成其他基站的坐标
% X(i,1) = 400*cos(a*(i-1));
% X(i,2) = 400*sin(a*(i-1));
% end
% Xreal = -150;Yreal = 200;%移动台真实坐标
% %产生TDOA测量结果
% Rb = sqrt((Xreal - Xb)^2+(Yreal - Yb)^2);%移动台到基站的真实距离
% N = normrnd(0,delta,1,M);%产生TDOA测量误差
% Kb = Xb^2+Yb^2;
% R = zeros(M,1);
% for i=1:M %产生TDOA测量值
% R(i) = -Rb+sqrt((Xreal - X(i,1))^2+(Yreal - X(i,2))^2)+N(i);
% end
% Q = (0.5*eye(M)+0.5*ones(M))*(delta^2);
% Pbs = [Xb Yb;X];
% N = 5;
% [POS_ref POS1 POS2 POS3 POS4] = TDOA_chan(R,Pbs,Q)
N = size(Pbs,1);
K = zeros(1,N);
K = Pbs(:,1).^2 + Pbs(:,2).^2;
ha = 0.5*(R.^2-K(2:N)+K(1))
Ga = -[Pbs(2:N,1)-Pbs(1,1) Pbs(2:N,2)-Pbs(1,2) R]
%计算第一次WLS估计结果(远距算法)
Za = inv(Ga.'*inv(Q)*Ga)*Ga.'*inv(Q)*ha;
Ba = diag(Va);
Fa = Ba*Q*Ba;
Zacov = inv(Ga.'*inv(Fa)*Ga);
%第一次WLS计算(近距算法)
Va2 = sqrt((Za2(1)-Pbs(2:N,1)).^2+(Za2(2)-Pbs(2:N,2)).^2);
Ba2 = diag(Va2);
Fa2 = Ba2*Q*Ba2;
Zacov2 = inv(Ga.'*inv(Fa2)*Ga);
%第二次WLS计算(近距算法)
Gb = [1 0;0 1;1 1];
Bb2 = [Za2(1)-Pbs(1,1) 0 0;0 Za2(2)-Pbs(1,2) 0;0 0 sqrt((Za2(1)-Pbs(1,1))^2+(Za2(2)-Pbs(1,2))^2)];
Fb2 = 4*Bb2*Zacov2*Bb2;
POS_ref = Za2(1:2,1); %第一次WLS的估计结果,作为参考作最终定位结果的判决POS1 = sqrt(Zb2)+Pbs(1,:).'; %定位结果1
POS2 = -sqrt(Zb2)+Pbs(1,:).';%定位结果2
POS3 = [-sqrt(Zb2(1));sqrt(Zb2(2))]+Pbs(1,:).';%定位结果3
POS4 = [sqrt(Zb2(1));-sqrt(Zb2(2))]+Pbs(1,:).';%定位结果4
源代码运行结果展示。