同济汽车震动课件
同济 汽车振动 机械振动 PPT第三章+多自由度系..(2)
所施加的一组外力数值上正是质量矩阵M的第j 列
结论:
质量矩阵M 中的元素mij是使系统仅在第j 个坐 标上产生单位加速度而相应于第i个坐标上 所需 施加的力。 mij又称为质量(惯性)影响系数。 根据它的物理意义可以直接写出质量矩阵M。
惯性影响系数mij的定义为:
使系统的第j个坐标产生单位加速度,而其它 的坐标加速度为零时,在第i个坐标上所需施加的 作用力的大小。 质量矩阵一般亦为对称矩阵。 注意: 1.在某坐标上施加加速度时,质量的位移为0,因 此与弹性力无关; 2.mij为与惯性力平衡的力。
假设系统受到外力作用的瞬时,只产生加速度而不产 生任何位移即
MX P(t )
假设作用于系统的是这样一组外力,它们使系统只 在第j 个坐标上产生单位加速度,而在其他各个坐标 上不产生加速度。
m11 m21 P MX mn1 m1 j m2 j mnj 0 m1n m1 j m m2 n 2j 1 mnn 0 mnj
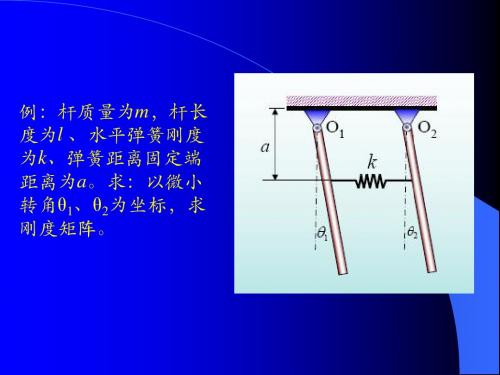
me m M 2 me I C me
系统振动微分方程为:
me D k1 k2 x k2 a2 k1a1 xD 0 m me I me2 k a k a k a 2 k a 2 0 C 2 2 D D 2 2 1 1 1 1
x k1n 01 pp1 t 1 t 0 p t t p k2 n x2 2 2 x n t p knn 0n pn t
1 mgl ka 2 2 ka 2
同济 汽车振动 机械振动 PPT第三章+多自由度系..
1 1 1 3 −1 0 1 1 1 6 0 0 KΦ = ΦT KΦ = 2 0 −1 k −1 2 −1 2 0 −1 = k 0 6 0 1 −1 1 0 −1 3 1 −1 1 0 0 12
变换后的方程为:
&& QN + KNQN = P N
&& qN1 +ω q = pN1 ( t ) && qN2 +ω q = pN2 ( t ) M 2 qNn +ωnnqNn = pNn ( t ) &&
注意:以上为广义的向量正交性的概念 注意:
当i = j时,A KA = ω A MA
2 ni
( i)T
( i)
( i)T
( i)
由于质量矩阵为正定矩阵,刚度矩阵为半正定 矩阵,因此有:
设 (i) MA(i) = m →第阶 量 质量) A i 主质 ( 模态 pi i ( i)T 设 KA( ) = kpi →第阶 i 主刚 ( 模态刚 ) 度 度 A 2 ωni = kpi mpi 第阶 i 固有 频率
( 4)
MA = 0
( i)
Qi ≠ j ⇒ω ≠ ω ⇒ A MA = 0
2 ni 2 nj
( j)T ( i)
代 (1) ⇒ A KA = 0 入
( j)T
当 ≠ j时 i , ( j )T A MA( i) = 0 主振型向量对质量矩阵的正交性 jT A( ) KA( i) = 0 主振型向量对刚度矩阵的正交性
( 2)
L 0 O M ( n)T ( n) L A KA L 0
汽车振动基础-PPT课件

– =>9.8呢,会是什么现象?
• 机床振动--降低机床的精度,产生误动作,影响其性能 • 机械噪声--纺织厂工人耳聋耳背、钻孔机、打桩机、导振器等 • 遇到气流时飞行中的飞机--气流引起的共振导致飞机折翼 • 遇到海浪时航行中的轮船--海浪引起的共振引起轮船断裂
①振动分析:已知激励和系统特性,求系统响应。 ——振动的正问题。 振动隔离——如为减小汽车在不平路面上行驶时传给车身振动的汽车悬架设计。
动态特性分析——如已知路面条件和车辆结构,乘坐舒适性和操纵稳定性分析。
②环境预测: 已知系统特性和振动响应,求系统所受到的激励。——振动的逆问题 有在线控制、工具开发等,如振源判断、载荷识别、工况监控与故障诊断等, 基于五轮仪的路面谱测量就是这方面的应用。
概论--内容简介
1、振动及其研究的问题 在外力的作用下,弹性的机械或结构不仅产生刚体运动,还会产生由于自身
弹性而引起在平衡位置附近的微小往复运动,这种往复运动通常称为振动。 振 动所研究的问题通常分为振动分析、环境预测和系统辨识三类。 2、振动的分类及研究振动的一般方法
自由振动、受迫振动、简谐振动、周期振动、非周期振动、随机振动 理论分析法、实验研究法、理论与实验相结合的方法
③系统辨识: 已知激励和系统响应,确定系统的特性。 ——也是振动的逆问题。 这类问题往往用模态实验的方法识别出系统,以建立振动模型或检验已有的 理论模型。
研究机械振动的基本方法
同济大学机械振动机械振动分析讲义-单自由度系统振动分析-上课
3. 典型单自由度振动系统:任何形式的单自由度振动系统都可以转 化到的一种标准形式。
2013-09-24
单自由度振动分析
4
2
单自由度振动系统
2013-09-24
单自由度振动分析
5
基本要素
典型单自由度振动系统包括四个基本要素:
• 等效质量 • 等效刚度 • 等效阻尼
me ke
m
k
ce
• 等效外界激振力
无阻尼自由振动形式
单自由度振动分析
23
固有振动特性
x (t )
系统固有(圆)频率
n
k m
kx 0 m x
2013-09-24
2 n x x0
单自由度振动分析 24
12
系统固有频率的求法
系统固有频率
n
k m k mg / g m m
n 1 2 2
2
me m2 m1
2 l2 l12
单自由度振动分析
15
分析实例
k1 l3 l1
P x 1
等效刚度(定义法):
M Pl
1
k 2l1 k1
l3 l3 0 l1
l32 l12
x
l3 l3 l1 l1
k2 x k2
k e P k 2 k1
等效刚度(能量法):
2013-09-24 单自由度振动分析 9
等效质量的确定
1. 等效质量 me的确定方法 • 定义法:使系统在选定的独立坐标上产生单位加速度时,而需要在该坐标上施加
的作用力,称为系统对应于该坐标的等效质量。
• 能量法:按照选定的独立坐标将系统的动能综合归纳为 T
汽车振动学PPT精选文档
1
2.1 单自由度振动系统
单自由度振动系统指的是在振动过程中, 振系的任一瞬间形态由一个坐标即可确定 的系统。
m
2
2.1.1 等效刚度
刚度k的定义 使系统的某点沿指定方向产生单位位移
时,在改点同一方向上所要施加的力,就 称为系统在该点沿指定方向的刚度。
k F x
3
弹性元件为等截面直圆杆,质量忽略不计,在杆
2.1.1 等效刚度
组合弹簧系统的等效刚度
5
2.1.1 等效刚度
用能量法确定等效刚度 实际系统要转化的弹簧的弹性势能与等
效系统弹簧势能相等
Ua Ue 12kex2
6
例题2.1 如图所示弹簧-质量振动系统,滑轮 与绳索之间无相对滑动,滑轮对其中心的 转动惯量为J,其半径为r,绳索上还有一个 作上下振动的质量m,若选取滑轮的角位移 作为系统的运动坐标,求系统的等效刚度ke
例题:求圆轴圆盘扭振系统的振动固有频率
22
T 1 m ( l ) 2 2
U 1 k (a )2 2
d [ 1 m ( l ) 2 1 k ( a ) 2 ] 0
dt 2
2
可得 + k ( a ) 2 0 ml
圆频率
pa k
lm
23
24
假定摆球的微幅振动为
简谐振动 A sin( pt )
J 可以通过周期计算转惯动量
20
固有频率的求法
由等效质量和等效刚度来求
21
固有频率的求法
应用能量法来求
T:动能U: ;势能 对振动系T统 U:常数 d (TU)0,可由此建立振 方动 程微分 dt 若动能达到Tm最 a时 x 大取势能 0,为则动能 0时为,势能必取得 Um最 ax 大 Tma= x Uma, x 可由此得到固有频率
《汽车振动学基础及其应用》教学课件第5章

0 T
2
A+
2A T
t
2
dt +
T 0
2
A
2A t T
2
dt
=
A2 T
t+
2 T
t 2 + 4t3 3T 2
0 T
2
+t
2 T
t 2 + 4t3 3T 2
T 0
2
=
A2 3
方差为:
2 x
=x2
2 x
=
A2 3
A 2 2
=
A2 12
汽车振动学基础及应用教学课件
5.2 随机振动的统计特性
x (t)=x
自相关函数仅仅是时间差 的函数,即
Rx (t1,t1+ )=Rx ( )
如果平稳随机过程的均值和自相关函数可以利用任何一个足够长的样本函数
的时间平均值来计算,即
x
=
lim
T
1 T
T2
T 2 xk (t)dt
Rx
(
)=
lim
T
1 T
T2
T 2 xk (t)xk (t+ )dt
= 1
0 Rx ( ) cosd
由此可知,Sx () 为 的偶函数。
汽车振动学基础及应用教学课件
5.2 随机振动的统计特性
在整个频率域内定义的 Sx () 为双边功率谱。在非负频率范围内定义的功率谱 称为单边功率谱,记作 Gx () 。
单边谱和双边谱的关系为 Gx ()=2Sx () , 0
(6)激励与响应的互谱
对激励与响应的互相关函数作傅里叶变换得到互谱,即
SFx ()= R Fx
汽车振动与噪声控制1概述PPT课件

噪声可使机械设备、建筑等产生声疲劳。
2024/6/5
12
1,声与噪声
噪声污染是工业化所带来的直接后果,随工业发展进程 的加快,噪声污染所涉及的范围仍不断扩大,同时随着生 活水平的提高,对环境的要求越来越高,所以为噪声的控 制提出了更高的要求。
2024/6/5
28
2,振动
由于人体的身体素质、年龄以及心理上的千差万别, 对振动的敏感程度也不同,导致评价振动对人体的影响比 较复杂,国际标准化组织(ISO)在综合了大量资料的基 础上提出了ISO2631/1-1985 《人体承受全身振动的评 价》,在1997年又做了修正,公布了ISO2631/1-1997。
弹性体振动:无穷自由度。由于许多情况下弹性体振 动无 解析解,目前多采用有限元的方法将连续的弹性 体 划分为若干离散单元的组合体进行研究。
2024/6/5
21
2,振动
按振动位移特征分类:
角振动:如车架的扭转振动,轴的扭转振动 直线振动:如车辆的垂直振动
按系统结构参数特性分类:
线性振动:如振动系统的质量、刚度、阻尼均不随系 统运 动参数而变化,且弹性力、阻尼力均可简化为线 性 模型,该系统发生的振动为线性振动。
低于20Hz及高于20KHz声人们完全听不到吗?。
低于20Hz的声波为次声波(infrasound) ; 高于20KHz的声波为超声波(ultrasound) 。
次声波和超声波均难以称为噪声源。 只有可听声频域内结构的振动以及气体的脉动和涡 流、空腔共鸣才能构成噪声源。
汽车振动学—随机振动PPT课件

x2 x1
p( , t1 )d
(2)时间概率:是对随机过程的某一样本的时间定义的。
设某随机过程的一个样本函数 为
xk (,t)如图所示,其时间概率分布函数定义
ti
Pk
( x1 )
Pk ,nob[ xk
(t )
x1 ]
lim
T
i
T
式中 ti是样本函数 xk (t满) 足 条件x的k 诸(t时) 间段x的1 累加长度。
2、时间平均与各态历经随机过程
(1)时间平均 是就某一样本函数 xk (t)在时间上的取值的平均值。
①时间均值
x
(k
)
xk
(t)
lim
T
1 T
T
0 xk (t)dt
②时间自相关函数
Rx
(k
,
)
xk
(t ) xk
(t
)
lim
T
1 T
T
0 xk (t)xk (t )dt
第6页/共34页
时间均值与时间自相关函数一般会随样本函数而异,即是样本编号k的函数。 由于某一个样本函数并不足以反映一个随机过程的全貌,故基于某一个样本函数的 时间平均一般也不能代表整个随机过程的统计特性。但是在所谓的“各态历经”假 设下,却可以用一个样本函数来有效地代表整个随机过程的特性。
②自相关函数(二阶平均)
Rx (ti ,ti ) E
xk (ti )xkxk (ti )xk (ti
)
时刻ti两一个般ti随而机言变,量总体自相关函数依赖X所1 选定xk的(ti起) 始, X时之2 刻间的xk统与(ti计时t联移i )系。它反映了 和
x1
x1 ]
汽车振动讲义分析

汽车整车噪声与振动控制技术武一民编著2010年3月1日第一篇汽车噪声与振动(NVH)介绍第一节汽车噪声与振动概述汽车按照结构可以分成车身系统、动力传动系统、悬架系统、电子系统、空调系统等子系统,车身系统包括车身、车架、悬架、座椅、和内饰。
动力传动系统(powertrain)包括发动机、变速器、离合器、传动轴系、进气系统、排气系统、发动机振动隔离系统,如图1-1所示。
在隔振分析时,发动机和变速器被视为一个整体考虑,叫动力装置(powerplant),悬架系统包括轮胎、减振器、弹簧、车桥等。
图1-1动力传动系统在汽车开发过程中,通常将汽车性能分解成许多性能。
如果这些性能都能达到了设计要求,那么整车的性能就能达到所期望的目标。
汽车性能可分为下列类别:●安全性空调系统性能能●可靠性电子系统性能能●噪声与振动模型制作●动力性能安装空间●燃油经济性成本控制●发动机控制与调节性能质量控制●排放与环境性能重量控制这些性能能都涉及汽车的很多系统和部件。
比如,噪声与振动系统就涉及汽车的每个系统,包括车体、发动机、悬架、进气、排气等系统,如果这些系统的噪声与振动都实现了事先设计的目标,那么整车的噪声与振动将能达到理想的效果。
汽车NVH是汽车的一项综合性的性能指标,噪声(Noise),振动(Vibration),声振粗糙度(Harshness)缩写为NVH,主要研究车辆的噪声和振动对整车性能与舒适性的影响,不舒适性(Harshness)—描述人对噪声和振动的主观感觉。
在汽车设计中我们要对汽车建立恰当的主客观评价指标,以顾客需求为中心,以高效、节能、环保为目标,合理确定汽车的NVH目标,运用实验和理论分析相结合的方法建立NVH的数值模型,进行NVH性能分析,运用数值模型或实验进行整车级和部件级NVH性能预测和匹配。
第二节汽车企业为什么要建立NVH能力国外公司的统计表明,整车约有1/3的故障问题是和车辆的NVH问题有关的。
汽车振动分析与测试课件:振动基本概念

dt
7
二、諧波分析
把一個週期函數展開成傅裏葉級數,即展開成為
一系列簡諧函數之和,稱為諧波分析。
x
a0 2
(an
n1
cos n1t
bn
sin n1t)
a0
2 T
T
x(t)dt
0
2
an T
T
0 x(t)cos n1tdt
品質,就得到用來分析車身垂直振動的最 簡單的單自由度振動模型。
汽車振動系統單自由度模型
10
本章小結
本章介紹了振動的基本概念,包括振動系統的組成、振動 的分類、振動的模型建立及其回應的求解、振回應的各種表 示方法和車輛振動模型的簡化。其中,
(1)振動系統是有品質、彈簧、阻尼和激勵四部分組成的,以及等效剛度、 等效品質和等效阻尼的計算; (2)振動系統可以根據輸入、輸出和系統的特性的不同進行分類; (3)振動系統數學模型或微分方程一般可由牛頓第二定律或達朗貝爾原理 建立;通過求解振動微分方程得到系統的回應; (4)系統回應可以利用三角函數來表示,也可以利用向量或複數來表示; 對於非簡諧的週期振動,可以利用諧波分析的方法; (5)對於複雜振動系統,可以通過合理簡化,建立簡化後的振動模型及其 振動微分方程。
bn
2 T
T
0 x(t)sin n1tdt
8
第4節 車輛振動簡化模型
(1) 7自由度模型
把汽車車身品質看作為剛體的立體模型 ,車
身主要考慮垂直、俯仰、側傾3個自由度,四 個車輪品質有4個垂直自由度,共7個自由度。
圖 汽車振動系統7自由度模型
(2) 4自由度模型 當汽車對稱於其縱軸線時,車身只有垂直振
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
同济大学汽车学院 张立军 2009年12月21日
第六章
随机振动分析
6.1 随机振动概述 6.2 随机振动的统计特性 6.3 随机振动响应分析方法
2009-12-21
简谐振动与频谱分析基础
2
6.1 随机振动概述
基本概念:
确定性振动 随机振动 振动。 如果振动系统的响应可以准确地用一个时间的 振动系统的响应不能用一个时间的函数来表示的 函数来表示的振动。
∫
∞
−∞
X (ω ) eiωt dω
x ( t ) = eiωt ⇒ y ( t ) = H (ω ) eiωt = H (ω ) x ( t )
1 ∞ y ( t ) = H (ω ) x ( t ) = H (ω ) X (ω ) eiωt d ω 2π ∫−∞ 1 ∞ y (t ) = Y (ω ) eiωt d ω Y (ω ) = H (ω ) X (ω ) 2π ∫−∞
5 2
∞
3 2⎞ 15 ⎛ μ x = ∫ xp ( x ) dx = ∫ ⎜ x ⋅ x ⎟ dx = −∞ 0 4 ⎝ 125 ⎠
μ x = ∫ x p ( x ) dx = ∫
2
2
∞
5
−∞
0
3 2 x ⋅ x dx = 15 125
2
2
σ x2 = x 2 − x 2 = 15 − ⎜
2009-12-21
2 S (ω ) dω = W ( f ) df ⇒ W ( f ) = 4π S (ω )
2009-12-21 简谐振动与频谱分析基础 18
第六章
随机振动分析
6.1 随机振动概述 6.2 随机振动的统计特性 6.3 随机振动响应分析方法
2009-12-21
简谐振动与频谱分析基础
19
6.3 随机激励下的响应
⎛ 15 ⎞ 15 ⎟ = ⎝ 4 ⎠ 16
简谐振动与频谱分析基础 13
6.2 随机振动的统计分析-相关域
相关函数 描述随机过程不同时刻随机变量之间的联系。
∞
R ( t1 , t2 ) = ∫
−∞ −∞
∫
∞
x1 x2 p ( x1 , x2 ) dx1dx2 = E ( x1 , x2 )
R (t, t + τ ) = ∫
∞
−∞ −∞
∫ x ( t ) ⋅ x ( t + τ ) p ( x ( t ) , x ( t + τ ) ) dxdx
∞
= E ⎡ x ( t ) ⋅ x ( t + τ )⎤ ⎣ ⎦
2009-12-21 简谐振动与频谱分析基础 14
6.2 随机振动的统计分析-平稳随机过程
平稳随机过程 都保持不变。 随机过程的概率分布相对任意一个时间推移
−∞
∞ x y
协方差
σ xy = E ⎡( x − μ x ) ( y − μ y ) ⎤ =Байду номын сангаас∫ ⎣ ⎦
=∫
∞ ∞ −∞ −∞ ∞ ∞ x y
∫ ( xy − yμ − xμ = ∫ ∫ xyp ( x, y ) dxdy − ∫ ∫ μ yp ( x, y ) dxdy − ∫ ∫ μ xp ( x, y ) dxdy + ∫ ∫ μ μ p ( x, y ) dxdy
多随机变量的联合概率分布
′ ′ P ( x1 , x2 ) = Prob [ x1 < x1 , x2 < x2 ] = ∫ p ( x ) = ∫ p ( x, y ) dy
−∞ ∞
x1
−∞ −∞
∫
x2
′ ′ ′ ′ p ( x1 , x2 ) dx1dx2
∞
p ( y ) = ∫ p ( x, y ) dx
各态历经过程 可以通过单个样本函数得到它的统 计特性,并且可以应用于总体。 时间平均
1 T /2 μ x = E [ x ] = lim ∫ x ( t ) dt T →∞ T −T /2 1 T /2 2 2 2 ψ x = E ⎡ x ⎤ = lim ∫ x ( t ) dt ⎣ ⎦ T →∞ T −T /2 1 T /2 Rx (τ ) = lim ∫ x ( t ) x ( t + τ ) dt T →∞ T −T /2
σ2
σ2
简谐振动与频谱分析基础 15
2009-12-21
6.2 随机振动的统计分析-平稳随机过程
μ 2 − σ 2 ≤ R (τ ) ≤ μ 2 + σ 2
R (τ ) = R ( −τ )
R (τ → ∞ ) = μ 2
2009-12-21
简谐振动与频谱分析基础
16
6.2 随机振动的统计分析-各态历经过程
, n)
{ xi }
简谐振动与频谱分析基础 6
6.2 随机振动的统计分析-概念
样本函数 随机过程的每一次试验结果称为一个样本函数。 随机过程的总体 n个随机过程试验得到的n个样本函数构成 随机过程的总体。
xn ( t )
x ( t1 ) = { x1 ( t1 ) , x2 ( t1 ) ,
2009-12-21 简谐振动与频谱分析基础
脉冲响应函数方法(杜哈梅积分)
y ( t ) = ∫ x (τ ) h ( t − τ ) dτ
t −∞
1 −ξωn ( t −τ ) h (t −τ ) = e sin (ωd ( t − τ ) ) mωd
2009-12-21
简谐振动与频谱分析基础
20
6.3 随机激励下的响应
频响函数法
1 x (t ) = 2π
−∞ ∞ −∞ ∞ ∞
=∫
−∞ −∞
∫ x ( t − θ ) x ( t + τ − θ ) h (θ ) h (θ ) dθ dθ
1 2 1 2 1
∞
2
Ry (τ ) = E ⎡ y ( t ) y ( t + τ ) ⎤ ⎣ ⎦ =∫
∫ =∫ ∫
∞
∞
∞
−∞ −∞ ∞
E ⎡ x ( t − θ1 ) x ( t + τ − θ 2 ) ⎤ h (θ1 ) h (θ 2 ) dθ1dθ 2 ⎣ ⎦ Rx (τ + θ1 − θ 2 ) h (θ1 ) h (θ 2 ) dθ1dθ 2
简谐振动与频谱分析基础 24
−∞ −∞
2009-12-21
6.3 平稳随机激励下的响应
频响函数法—功率谱密度
1 S y (ω ) = 2π 1 = 2π
∞
∫
∞
−∞ ∞
Ry (τ ) e − iωτ dτ e
− iωτ
∫
−∞
dτ ∫
∞
−∞ −∞ ∞
∫
∞
Rx (τ + θ1 − θ 2 ) h (θ1 ) h (θ 2 ) dθ1dθ 2
−∞
∞
2009-12-21
简谐振动与频谱分析基础
10
6.2 随机振动的统计分析-时间域
数学期望
μ f = E ⎡ f ( x ) ⎤ = f ( x ) = ∫ f ( x ) p ( x ) dx ⎣ ⎦ −∞
μ x = E [ x ] = x = ∫ xp ( x ) dx
−∞ 2 x 2 2 ∞
−∞ −∞
y
−∞ −∞
x
y
简谐振动与频谱分析基础
6.2 随机振动的统计分析-时间域
例题 转子制造误差引起的偏心分布满足以下规律,求时间域的统计参数。
⎧kx 2 p ( x) = ⎨ ⎩ 0
∞
0≤ x≤5 others
5
3 1 = ∫ p ( x ) dx = ∫ kx dx ⇒ k = −∞ 0 125
2009-12-21 简谐振动与频谱分析基础 21
6.3 随机激励下的响应
脉冲响应函数法与频响函数法的关系
1 y (t ) = h (t ) = 2π X (ω ) = ∫ x ( t )e
−∞ ∞
∫
∞
−∞
H (ω ) X (ω ) eiωt dω
∞ −∞
− iωt
dt = ∫ δ ( t )e − iωt dt = 1
P ( x)
dP ( x ) P ( x + Δx ) − P ( x ) p ( x) = = lim Δx → 0 Δx dx
简谐振动与频谱分析基础 9
6.2 随机振动的统计分析-概率分布
概率分布的性质
P ( x ) = ∫ p ( x′ ) dx′
x −∞
P ( ∞ ) = ∫ p ( x′ ) dx′ = 1
x y ∞ ∞ −∞ −∞ ∞ ∞ −∞ −∞ ∞ x ∞
∫ ( x − μ ) ( y − μ ) p ( x, y ) dxdy + μ μ ) p ( x, y ) dxdy
∞ −∞ −∞
相关系数
σ xy ρ xy = σ xσ y
12
= E ( xy ) − μ x μ y
2009-12-21
−∞ −∞ ∞
θ =t −τ
∞
⎡ ∞ x ( t − θ ) h (θ ) dθ ⎤ = ∞ E ⎡ x ( t − θ ) ⎤ h (θ ) dθ E ⎡ y ( t )⎤ = E ∫ ⎣ ⎦ ⎦ ⎢ −∞ ⎥ ∫−∞ ⎣ ⎣ ⎦ = E ⎡ x ( t − θ ) ⎤ ∫ h (θ ) dθ ⎣ ⎦
2 R (τ = 0 ) = E ( x 2 ) = ψ x
E ⎡{ x ( t ) − μ }{ x ( t + τ ) − μ }⎤ σx x τ ⎦ = ⎣ ρ= σ tσ t +τ σ2