北京交通大学研究生课程(神经网络、模糊控制及专家系统)第七章_PPT课件
《现代控制理论》PPT课件
精选ppt
8
4、控制理论发展趋势
❖ 企业:资源共享、因特网、信息集成、 信息技术+控制技术 (集成控制技术)
❖ 网络控制技术
❖ 计算机集成制造CIMS:(工厂自动化)
精选ppt
9
三、现代控制理论与古典控制理论的对比
❖ 共同 对象-系统 主要内容 分析:研究系统的原理和性能 设计:改变系统的可能性(综合性能)
现代控制理论
Modern Control Theory
精选ppt
1
绪论
❖ 学习现代控制理论的意义: 1.是所学专业的理论基础 2.是研究生阶段提高理论水平的重要环节。 3. 是许多专业考博士的必考课。
精选ppt
2
一、控制的基本问题
❖ 控制问题:对于受控系统(广义系统)S,
寻求控制规律μ(t),使得闭环系统满足给
精选ppt
10ቤተ መጻሕፍቲ ባይዱ
四、本课程主要内容
❖ 系统描述:状态空间表示法 ❖ 系统分析:状态方程的解、线性系统的能控
和能观测性、稳定性分析 ❖ 系统设计:状态反馈和状态观测器、 ❖ 最优控制:最优控制系统及其解法
精选ppt
11
五、使用教材
❖ 《现代控制理论》(第二版)刘豹主编 机械工业出版社
参考书 现代控制理论与工程 西安交大
定的性能指标要求。
精选ppt
3
求解包括三方面:
1. 系统建模 用数学模型描述系统 2. 系统分析 定性:稳定性、能控能观性
定量:时域指标、频域指标 3. 系统设计
控制器设计、满足给定要求 结构设计 参数设计
精选ppt
4
二、控制理论发展史(三个时期)
❖1.古典控制理论:
北京交通大学操作系统讲义
现代操作系统
陈向群等译
机械工业出版社
7/15/2021
北京交通大学操作系统
教材内容删减说明
第三章 处理机调度与死锁
➢ 3.3 实时调度 ➢ 3.4 多处理机系统中的调度
第五章 设备管理
➢ 5.6 磁盘存储器管理
第八章 网络操作系统 第九章 系统安全性
7/15/2021
北京交通大学操作系统
课程主要内容及教学安排
保护模式内存管理
➢ 内存寻址(分段寻址技术;逻辑地址14+32) ➢ 地址变换(分段[段选择符→段描述符] + 分页) ➢ 内存保护(全局/局部描述符表、特权级)
中断和异常处理
➢ 中断向量与中断描述符表、中断源与异常源
任务管理(任务状态段) 任务切换与过程调用不同!
7/15/2021
北京交通大学操作系统
1.1 什么是操作系统
1.1.1 操作系统的地位和目标 1.1.2 操作系统的作用 1.1.3 操作系统的组成及层次模型 1.1.4 操作系统的定义 1.1.5 操作系统举例
7/15/2021
北京交通大学操作系统
操作系统的作用(1) 用户与计算机硬件系统之间的接口
命令方式(操作系统外壳)
➢ 面向一般用户 ➢ 命令行/菜单式/命令脚本式/图形用户接口
操作系统其它硬件基础举例说明
内存地址空间布局、基本输入输出系统BIOS CMOS存储器与实时时钟RT I/O端口寻址和访问控制方式
➢ 主要使用独立编址方式,部分使用统一编址方式
中断控制器Intel 8259A、定时计数器Intel 8254 DMA控制器Intel 8237A、键盘控制器Intel 8042 串行控制卡RS-232标准 显示卡MDA/CGA/EGA/VGA 软盘控制器和硬盘控制器
神经网络专题ppt课件
(4)Connections Science
(5)Neurocomputing
(6)Neural Computation
(7)International Journal of Neural Systems
7
3.2 神经元与网络结构
人脑大约由1012个神经元组成,而其中的每个神经元又与约102~ 104个其他神经元相连接,如此构成一个庞大而复杂的神经元网络。 神经元是大脑处理信息的基本单元,它的结构如图所示。它是以细胞 体为主体,由许多向周围延伸的不规则树枝状纤维构成的神经细胞, 其形状很像一棵枯树的枝干。它主要由细胞体、树突、轴突和突触 (Synapse,又称神经键)组成。
15
4.互连网络
互连网络有局部互连和全互连 两种。 全互连网络中的每个神经元都 与其他神经元相连。 局部互连是指互连只是局部的, 有些神经元之间没有连接关系。 Hopfield 网 络 和 Boltzmann 机 属于互连网络的类型。
16
人工神经网络的学习
学习方法就是网络连接权的调整方法。 人工神经网络连接权的确定通常有两种方法:
4
5. 20世纪70年代 代表人物有Amari, Anderson, Fukushima, Grossberg, Kohonen
经过一段时间的沉寂后,研究继续进行
▪ 1972年,芬兰的T.Kohonen提出了一个与感知机等神经 网络不同的自组织映射理论(SOM)。 ▪ 1975年,福岛提出了一个自组织识别神经网络模型。 ▪ 1976年C.V.Malsburg et al发表了“地形图”的自形成
6
关于神经网络的国际交流
第一届神经网络国际会议于1987年6月21至24日在美国加州圣地亚哥 召开,标志着神经网络研究在世界范围内已形成了新的热点。
《模糊控制系统》PPT课件
是所期望的。这促使我们研究模糊系统作为万能
函数逼近器并拥有最小系统构成的必要条件,从
而使这些必要条件能用于指导模糊系统开发者设
计更紧凑的模糊控制器和模糊模型
• 必要条件设置了需要的输入模糊集、输出模糊集 和模糊规则,表明了模糊系统需要的输入模糊集
和模糊规则的数目依赖于被逼近函数的极值点的
数目和位置
精选ppt
“Fuzzy Sets”一文,首次提出了模糊集合的概念
• 1974年英国教授Mamdani首次将模糊集合理论应
用于加热器的控制,他将基于规则系统的想法与
模糊参数相结合来构造控制器,模仿人类操作者
的操作经验
• 1985年Takagi和Sugeno提出了另一类具有线性规
则后项的模糊控制器,称之为Takagi-Sugeno
(1988, Japan)
• Postsurgical patients
(1989, USA)
• Auto focus video camera
(1990, Japan)
• Washing machines
(1990, Japan)
• Air conditioners
(1990, Japan)
• Anti-shaking video camera
控制规律
• 各种类型的Mamdani和TS模糊系统在过去几年中
都被证明是万能逼近器,它们能一致逼近定义在
闭定义域D上的任意连续函数到任意高的逼近精
度。这些模糊系统有:加法模糊规则系统、模糊
输入—输出控制器、Sugeno模糊控制器的变型、
非独点模糊逻辑系统、一般Mamdani型模糊系统、
采用线性规则后项的TS型模糊系统、广义模糊系
北京交通大学研究生课程(神经网络、模糊控制及专家系统)第六章
第一节 引言
一、神经网络控制的优越性
(2) 在控制中的主要作用
1.在反馈控制系统中充当控制器的作用; 2.在基于精确模型的各种控制结构中充当对象的模型; 3.在传统控制系统中起优化计算作用; 4.在与其它智能控制方法和优化算法如模糊控制、专家 控制及遗传算法相融合中,为其提供非参数化对象模 型、优化参数、推理模型及故障诊断等。
y = f(u,t) 选用控制器网络为多层感知器神经元网络。取最优性能指标函数为 1 E p [ yd (k ) y (k )]2 2 则权阵的学习规则可以通过梯度寻优法来求得,即 w ji (k 1) w ji (k ) 若系统模型 w ji 已知,则可 E p
以通过 y (k ) Jacobian 矩 w ji (k ) [ yd (k ) y (k )] w ji (k ) 阵求出
z
神经网络
1
z n 1
z m z
y (k 1)
1
u (k )
图5-25
对象
直接逆模型的训练结构示意图
一、神经网络直接逆模型控制法
考虑如下单输入单输出系统 y (k 1) f [ y (k 1), , y (k n 1), u (k ),, u (k m)] 假设上式可逆,则函数g,有 u (k ) g[ y (k 1), , y (k n 1), u (k 1), , u (k m)] 若能用一个多层前向传播神经网络来逼近逆模型函数g,则 uN ( X )
图5-20 离线学习法
在线学习法 目的:找出一个最优控制量u使得系统输出y趋于期望输出 yd。 权值调整应该使
yd
神经网络 N c
神经网络方法-PPT课件精选全文完整版

信号和导师信号构成,分别对应网络的输入层和输出层。输
入层信号 INPi (i 1,根2,3据) 多传感器对标准试验火和各种环境条件
下的测试信号经预处理整合后确定,导师信号
Tk (k 1,2)
即上述已知条件下定义的明火和阴燃火判决结果,由此我们
确定了54个训练模式对,判决表1为其中的示例。
15
基于神经网络的融合算法
11
局部决策
局部决策采用单传感器探测的分析算法,如速率持续 法,即通过检测信号的变化速率是否持续超过一定数值来 判别火情。 设采样信号原始序列为
X(n) x1 (n), x2 (n), x3 (n)
式中,xi (n) (i 1,2,3) 分别为温度、烟雾和温度采样信号。
12
局部决策
定义一累加函数 ai (m为) 多次累加相邻采样值 的xi (差n) 值之和
样板和对应的应识别的结果输入人工神经网络,网络就会通过
自学习功能,慢慢学会识别类似的图像。
第二,具有联想存储功能。人的大脑是具有联想功能的。用人
工神经网络的反馈网络就可以实现这种联想。
第三,具有容错性。神经网络可以从不完善的数据图形进行学
习和作出决定。由于知识存在于整个系统而不是一个存储单元
中,一些结点不参与运算,对整个系统性能不会产生重大影响。
18
仿真结果
19
仿真结果
20
2
7.2 人工神经元模型—神经组织的基本特征
3
7.2 人工神经元模型—MP模型
从全局看,多个神经元构成一个网络,因此神经元模型的定义 要考虑整体,包含如下要素: (1)对单个人工神经元给出某种形式定义; (2)决定网络中神经元的数量及彼此间的联结方式; (3)元与元之间的联结强度(加权值)。
智能控制(研究生)习题集
习题集第一章概论1.试从学科和能力两个方面说明什么是人工智能。
2.哪些思想、思潮、时间和人物在人工智能发展过程中起了重要作用?3.近年来人工智能研究取得哪些重要进展?4.为什么能够用计算机模拟人类智能?5.目前人工智能学界有哪些学派?它们的认知观为何?6.自动控制存在什么机遇与挑战?为什么要提出智能控制?7.简述智能控制的发展过程,并说明人工智能对自动控制的影响。
8.傅京孙对智能控制有哪些贡献?9.什么是智能控制?它具有哪些特点?10.智能控制器的一般结构和各部分的作用为何?它与传统控制器有何异同?11.智能控制学科有哪几种结构理论?这些理论的内容是什么?12.为什么要把信息论引入智能控制学科结构?13.人工智能不同学派的思想在智能控制上有何反映?第二章知识表示方法1.状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?2.设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
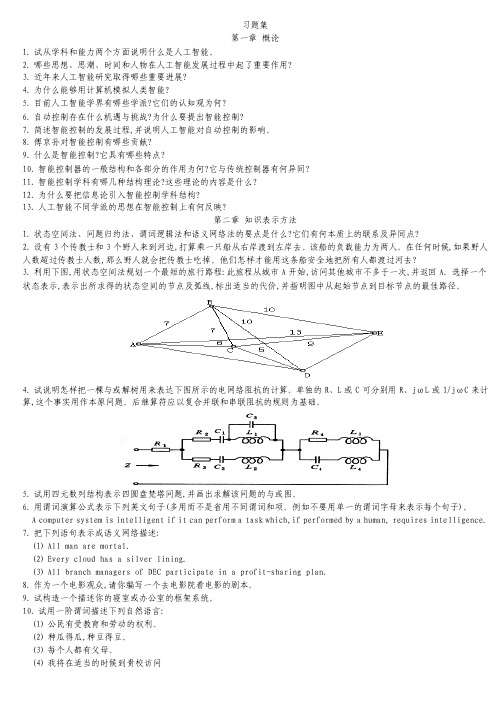
他们怎样才能用这条船安全地把所有人都渡过河去?3.利用下图,用状态空间法规划一个最短的旅行路程:此旅程从城市A开始,访问其他城市不多于一次,并返回A。
选择一个状态表示,表示出所求得的状态空间的节点及弧线,标出适当的代价,并指明图中从起始节点到目标节点的最佳路径。
4.试说明怎样把一棵与或解树用来表达下图所示的电网络阻抗的计算。
单独的R、L或C可分别用R、jωL或1/jωC来计算,这个事实用作本原问题。
后继算符应以复合并联和串联阻抗的规则为基础。
5.试用四元数列结构表示四圆盘梵塔问题,并画出求解该问题的与或图。
6.用谓词演算公式表示下列英文句子(多用而不是省用不同谓词和项。
例如不要用单一的谓词字母来表示每个句子)。
A computer system is intelligent if it can perform a task which,if performed by a human, requires intelligence.7.把下列语句表示成语义网络描述:(1)All man are mortal.(2)Every cloud has a silver lining.(3)All branch managers of DEC participate in a profit-sharing plan.8.作为一个电影观众,请你编写一个去电影院看电影的剧本。
北京交通大学第一学期硕士课表

1-8周90人
多媒体DQ106
最优控制理论及应用
1-8周60人
多媒体DQ305
计算机网络体系与协议
1-8周 150人
多媒体SD106
高等数字集成电路设计
1-8周40人
多媒体SY405
智能交通系统
1-6周,8-9周120人
多媒体九教东102
现代半导体器件与工艺
9-16周40人
多媒体SY405
控制工程专业外语
1-8周50人
多媒体Z306
移动IP网
1-16周100人
多媒体SY301
现代电子测量技术
1-8周30人
多媒体Z109
光电子器件理论与技术
1-8周 70人
多媒体SD108
基于模型驱动(MDA)的安全系统设计
9-16周90人
多媒体YF513
MEMS器件与设计
9-16周40人
多媒体SY103
光电子器件理论与技术
1-8周 70人
多媒体SY301
电磁兼容与测量
1-6周,8-9周60人
多媒体九教东101
4大节
14:10-16:00
交通系统状态监测与故障诊断技术
1-8周80人
多媒体YF208
无线通信新技术-1
9-16周100人
多媒体SY105
无线通信新技术-2
9-16周100人
多媒体SY106
1-8周60人
多媒体YF104
集成电路工程专业外语
1-8周 40人
多媒体SY403
多媒体信息处理和传输技术
1-8周90人
多媒体SY106
数字图像处理
1-8周60人
人工智能控制技术课件:模糊控制
模糊集合
模糊控制是以模糊集合论作为数学基础。经典集合一般指具有某种属性的、确定的、
彼此间可以区别的事物的全体。事物的含义是广泛的,可以是具体元素也可以是抽象
概念。在经典集合论中,一个事物要么属于该集合,要么不属于该集合,两者必居其一,
没有模棱两可的情况。这表明经典集合论所表达概念的内涵和外延都必须是明确的。
1000
1000
9992
9820
的隶属度 1 =
= 1,其余为: 2 =
= 0.9992, 3 =
=
1000
1000
1000
9980
9910
0.982, 4 =
= 0.998, 5 =
= 0.991,整体模糊集可表示为:
1000
1000
1
0.9992
0.982
0.998
《人工智能控制技术》
模糊控制
模糊空基本原理
模糊控制是建立在模糊数学的基础上,模糊数学是研究和处理模糊性现
象的一种数学理论和方法。在生产实践、科学实验以及日常生活中,人
们经常会遇到模糊概念(或现象)。例如,大与小、轻与重、快与慢、动与
静、深与浅、美与丑等都包含着一定的模糊概念。随着科学技术的发展,
度是2 ,依此类推,式中“+”不是常规意义的加号,在模糊集中
一般表示“与”的关系。连续模糊集合的表达式为:A =
)( /其中“” 和“/”符号也不是一般意义的数学符号,
在模糊集中表示“构成”和“隶属”。
模糊集合
假设论域U = {管段1,管段2,管段3,管段4,管段5},传感器采
1+|
表3.控制系学院(系、所)硕士研究生课程简介

[5]B.Kosko,模糊控制 (黄崇福译), 西交大出版社, 1999
[6]Kevin M. Passino, Stephen yurkovich, Fuzzy Control,清华大学出版社, 2001
[7]C. C. Lee, “ Fuzzy Logic in Control Systems: Fuzzy Logic Controller Parts I, II ”, IEEE Transactions on Systems, Man and Cybernetics , Vol.20, pp.404~435, Mar./Apr., 1990
[8]B. K. Bose, Modern Power Electronics andAC Drive, Prentice Hall, Upper Saddle River 2002.
9.1模糊控制器实现的几种方法
9.2模糊控制芯片
教材:
王立新 著、王迎军 译,模糊系统与模糊控制,清华大学出版 社,2003
主要参考书:
[1]L.A.扎德, 模糊集合、语言变量及模糊逻辑,科学出版社,1982
[2]章卫国 等, 模糊控制理论与应用, 西北工业大学出版社, 1999
[3]张乃尧 等, 神经网络与模糊控制, 清华大学出版社, 1998
第七章模糊控制基础(4学时)
7.1常规控制系统的特点
7.2为什么用模糊控制?
7.3模糊控制系统的结构与工作原理
7.4模糊控制器设计
7.5应用实例
第八章优化模糊控制技术(3学时)
8.1 . 自调节因子的模糊控制
8.2.模糊模型参考学习控制
8.3.自结构模糊神经网络控制
《神经网络电子教案》课件
《神经网络电子教案》PPT课件第一章:神经网络简介1.1 神经网络的定义1.2 神经网络的发展历程1.3 神经网络的应用领域1.4 神经网络的基本组成第二章:人工神经元模型2.1 人工神经元的结构2.2 人工神经元的激活函数2.3 人工神经元的训练方法2.4 人工神经元的应用案例第三章:感知机3.1 感知机的原理3.2 感知机的训练算法3.3 感知机的局限性3.4 感知机的应用案例第四章:多层前馈神经网络4.1 多层前馈神经网络的结构4.2 反向传播算法4.3 多层前馈神经网络的训练过程4.4 多层前馈神经网络的应用案例第五章:卷积神经网络5.1 卷积神经网络的原理5.2 卷积神经网络的结构5.3 卷积神经网络的训练过程5.4 卷积神经网络的应用案例第六章:递归神经网络6.1 递归神经网络的原理6.2 递归神经网络的结构6.3 递归神经网络的训练过程6.4 递归神经网络的应用案例第七章:长短时记忆网络(LSTM)7.1 LSTM的原理7.2 LSTM的结构7.3 LSTM的训练过程7.4 LSTM的应用案例第八章:对抗网络(GAN)8.1 GAN的原理8.2 GAN的结构8.3 GAN的训练过程8.4 GAN的应用案例第九章:强化学习与神经网络9.1 强化学习的原理9.2 强化学习与神经网络的结合9.3 强化学习算法的训练过程9.4 强化学习与神经网络的应用案例第十章:神经网络的优化算法10.1 梯度下降算法10.2 动量梯度下降算法10.3 随机梯度下降算法10.4 批梯度下降算法10.5 其他优化算法简介第十一章:神经网络在自然语言处理中的应用11.1 词嵌入(Word Embedding)11.2 递归神经网络在文本分类中的应用11.3 长短时记忆网络(LSTM)在序列中的应用11.4 对抗网络(GAN)在自然语言中的应用第十二章:神经网络在计算机视觉中的应用12.1 卷积神经网络在图像分类中的应用12.2 递归神经网络在视频分析中的应用12.3 对抗网络(GAN)在图像合成中的应用12.4 强化学习在目标检测中的应用第十三章:神经网络在推荐系统中的应用13.1 基于内容的推荐系统13.2 协同过滤推荐系统13.3 基于神经网络的混合推荐系统13.4 对抗网络(GAN)在推荐系统中的应用第十四章:神经网络在语音识别中的应用14.1 自动语音识别的原理14.2 基于神经网络的语音识别模型14.3 深度学习在语音识别中的应用14.4 语音识别技术的应用案例第十五章:神经网络在生物医学信号处理中的应用15.1 生物医学信号的特点15.2 神经网络在医学影像分析中的应用15.3 神经网络在生理信号处理中的应用15.4 神经网络在其他生物医学信号处理中的应用重点和难点解析重点:1. 神经网络的基本概念、发展历程和应用领域。
智能控制第7章 模糊神经网络控制与自适应神经网络PPT课件

第五层
❖有两种模式
❖从上到下的信号传输方式 ,同第一层。
❖从下到上是精确化计算,如果采用重心法, 有
fj(5 ) w ( j5 )iu i(5 ) (m ( j5 )i (j5 )i)u i(5 ), i
E fj(4)
E fj(5)
fj(5) fj(4)
E fj(5)
fj(5) u(j5)
u(j5) fj(4)
E fj(5)
m(5) ji
u (5) (5)
ji i
u(j5)
i
u (5) (5) (5) jj jj
(j5i)ui(5))(
m u ) (5) (5) (5) (5)
图7-2 :规则节点合并示例
2. 有导师学习阶段
❖可采用BP学习
E1(y(t)ˆy(t))2min 2
w(t1)w(t)(E w)
E w ( n E )e ( n w t)e tE f w f E f fa w a
第五层
m E (j5)i a E (j5) a fj((j5 5))
wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感34如果被控系统yk1fykyk1uk1gukwwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感351tdltdltdltdl神经网络n神经网络n331基于神经网络的模型参考自适应控制结构图参考模型wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感3671wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感37则控制系统的误差方程为其中wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感383233wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感393233wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感40对于yk1fykyk1uk1guk可得如果存在可用神经网络逼近之
《神经网络预测控制》PPT课件
电气工程学院:何一文
医学PPT
1
一.引言
火电厂锅炉的过热蒸汽温度是其运行质量的重 要指标之一,过热蒸汽温度过高或过低都
会影响电厂的安全经济运行,但汽温调节对 象是一个多容环节,它的纯延迟时间和时间 常数都比较大,干扰因素多,对象模型不确 定,在锅炉自动调节系统中属于可控性最差 的一个调节系统。
医学PPT
7
各单元预测系统按照研究对象的关联模式相互关 联,并经由关联传递单元预测信息,共同完成对 整体系统未来一定时间动态特性的预测,而各单 元控制系统也经由关联传递控制信息,从而完成 对整体系统的控制。单元预测系统的设计和计算 是独立的和并行的,单元系统可以是不同性质和 不同模式的,能够适用于大型复杂系统地分析预 测。
2000. [5] 彭钢.热工PID控制算法的适应性与局限性分析[J].河北电力
医学PPT
2
一.引言
目前该系统控制的主导设计方案是PID律, 虽然一些先进控制技术近年来尝试在火 电厂自动化中应用,但由于理论上的局 限性和实现上的具体困难,均未能得到 广泛应用。
医学PPT
3
一.引言
本文根据单元控制的思想,并运用神经 网络预测控制的方法,应用于过热蒸汽 温度控制中。使单元控制的思想得以实 现,神经网络更接近生物神经网络的结 构,神经网络的优势得以更好发挥。设 计出了具有较高可靠性和较强鲁棒性的 控制系统。
医学PPT
10
三.神经网络模型预测控制简介
模型预测的第一步就是训练神经网络未来表示 网络的动态机制。模型输出与神经网络输出之 间的预测误差,用来作为神经网络的训练信号。 该过程如图二所示。
u 对象
神经网络基础PPT课件

AlexNet
VGGNet
ResNet
DenseNet
由Yann LeCun等人提出 ,是最早的卷积神经网 络之一,用于手写数字 识别。
由Alex Krizhevsky等人 提出,获得了2012年 ImageNet图像分类竞 赛的冠军,引入了ReLU 激活函数和数据增强等 技巧。
由牛津大学Visual Geometry Group提出 ,通过反复堆叠3x3的小 型卷积核和2x2的最大池 化层,构建了深度较深 的网络结构。
内部表示。
隐藏层
通过循环连接实现信息 的持久化,捕捉序列中
的动态信息。
输出层
将隐藏层的状态转化为 具体的输出。
循环连接
将隐藏层的状态反馈到 输入层或隐藏层自身, 实现信息的循环传递。
序列建模与长短时记忆网络(LSTM)
序列建模
01
RNN通过循环连接实现对序列数据的建模,能够处理任意长度
的序列输入。
久化。
Jordan网络
与Elman网络类似,但将输出 层的状态反馈到隐藏层。
LSTM网络
长短时记忆网络,通过引入门 控机制实现对长期依赖信息的
有效处理。
GRU网络
门控循环单元网络,一种简化 的LSTM结构,具有较少的参
数和较快的训练速度。
06 深度学习框架 TensorFlow使用指南
TensorFlow安装与配置教程
非线性可分问题
不存在一条直线(或超平面)能够将两类样本完全分开的 问题。对于这类问题,需要使用非线性分类器或者核方法 等技巧进行处理。
处理非线性可分问题的方法
包括使用多项式核、高斯核等核函数将数据映射到高维空 间使其线性可分;或者使用神经网络等非线性模型对数据 进行建模和分类。
模糊控制PPT课件

其他领域
如农业、医疗、环保等 领域的智能化控制。
模糊控制基本原理
01
02
03
04
模糊化
将输入变量的精确值转换为模 糊语言变量的过程,通过隶属
度函数实现。
模糊推理
根据模糊控制规则和当前输入 变量的模糊值,推导出输出变
量的模糊值。
去模糊化
将输出变量的模糊值转换为精 确值的过程,通过去隶属度函
数实现。
基于仿真实验的分析方法
通过搭建模糊控制系统的仿真模型,模拟系统的运行过程并观察其输出响应。根据输出响应的变化情况 来判断系统的稳定性。这种方法可以直观地展示系统的动态特性,但需要消耗较多的计算资源。
提高模糊控制系统稳定性措施
要点一
优化模糊控制规则
通过调整模糊控制规则中的参数和隶 属度函数形状,可以改善系统的控制 性能并提高稳定性。例如,增加控制 规则的数量、调整隶属度函数的分布 等。
借鉴物理退火过程,避免陷入局部最优解。
05
模糊控制系统稳定性分析
稳定性概念及判定方法介绍
稳定性概念
指系统受到扰动后,能够恢复到原来平衡状态的能力。对于模糊控制系统而言,稳定性是评价其性能的重要指标 之一。
判定方法
包括时域法、频域法和李雅普诺夫法等。其中,时域法通过观察系统状态随时间的变化来判断稳定性;频域法通 过分析系统频率响应特性来评估稳定性;李雅普诺夫法则是基于能量函数的概念,通过构造合适的李雅普诺夫函 数来判断系统的稳定性。
化工生产过程控制
采用模糊控制方法对化工生产过程 中的反应温度、压力、流量等参数 进行精确控制,确保生产安全和产 品质量。
智能交通系统领域应用案例
城市交通信号控制
运用模糊控制理论对城市交通信 号灯的配时方案进行优化设计, 提高道路通行效率和交通安全水
《模糊神经网络》课件

模糊神经网络在语音识别中的应用
总结词
语音信号具有时变性和非线性特性,模糊神经网络能够有效地处理这些特性,提高语音识别的准确性 。
详细描述
在语音识别领域,模糊神经网络被广泛应用于语音分类、语音合成、语音识别等方面。通过结合模糊 逻辑和神经网络的优点,模糊神经网络能够更好地处理语音信号中的噪声和不规则性,提高语音识别 的准确性和鲁棒性。
02
模糊逻辑与神经网 络的结合
模糊逻辑的基本概念
1
模糊逻辑是一种处理不确定性、不完全性知识的 工具,它允许我们描述那些边界不清晰、相互之 间没有明确界限的事物。
2
模糊逻辑通过使用隶属度函数来描述事物属于某 个集合的程度,而不是简单地用“是”或“否” 来回答。
3
模糊逻辑在许多领域都有应用,例如控制系统、 医疗诊断、决策支持等。
详细描述
在萌芽期,研究者们开始探索将模糊逻辑和神经网络相结合的可能性。随着相关理论和技术的发展,模糊神经网 络逐渐进入发展期,开始在实际应用中得到广泛关注和应用。如今,随着人工智能技术的不断进步,模糊神经网 络已经进入了成熟期,成为处理不确定性和非线性问题的有效工具。
模糊神经网络的应用领域
总结词
模糊神经网络在许多领域都有广泛的应用,如控制系 统、模式识别、智能机器人等。
模糊神经网络的性能评估
准确率
损失函数
衡量分类问题中神经网络正确分类的样本 比例。
评估神经网络预测结果与实际结果之间的 误差,用于优化神经网络参数。
泛化能力
过拟合与欠拟合
衡量神经网络对新样本的适应能力,即训 练好的网络对未见过的样本的预测能力。
过拟合指模型在训练数据上表现很好,但 在测试数据上表现不佳;欠拟合则指模型 在训练数据和测试数据上的表现都不佳。
神经网络理论基础PPT课件

20世纪80年代,随着反向传播算法的提出,神经网络重 新受到关注。反向传播算法使得神经网络能够通过学习来 调整权重,从而提高了网络的性能。
感知机模型
1957年,心理学家Frank Rosenblatt提出了感知机模型 ,它是最早的神经网络模型之一,用于解决模式识别问题 。
深度学习的兴起
神经网络的模型
总结词
神经网络的模型是由多个神经元相互连接而成的计算模型,它能够模拟生物神经系统的 复杂行为。
详细描述
神经网络模型可以分为前馈神经网络、反馈神经网络和自组织神经网络等类型。前馈神 经网络中,信息从输入层逐层传递到输出层,每一层的输出只与下一层相连。反馈神经 网络中,信息在神经元之间来回传递,直到达到稳定状态。自组织神经网络能够根据输
入数据的特性进行自组织、自学习。
神经网络的参数
总结词
神经网络的参数是用于调整神经元之间连接强度的可训练参 数,它们在训练过程中不断优化以实现更好的性能。
详细描述
神经网络的参数包括权重和偏置等。权重用于调整输入信号 对激活函数的影响程度,偏置则用于调整激活函数的阈值。 在训练过程中,通过反向传播算法不断调整参数,使得神经 网络能够更好地学习和逼近目标函数。
作用
误差函数用于指导神经网络的训练, 通过最小化误差函数,使网络逐渐 逼近真实数据。
梯度下降法
基本思想
梯度下降法是一种优化算法,通 过不断调整神经网络的参数,使
误差函数逐渐减小。
计算方法
计算误差函数的梯度,并根据梯 度信息更新网络参数。
优化策略
采用不同的学习率或适应学习 率策略,以加快训练速度并避免
2006年,深度学习的概念被提出,神经网络的层次开始 增加,提高了对复杂数据的处理能力。
北京交通大学研究生开课目录

博士生课程 001 电信 博士生课程 001 电信 博士生课程 001 电信 博士生课程 001 电信 博士生课程 001 电信 博士生课程 001 电信 博士生课程 001 电信 博士生课程 001 电信 博士生课程 001 电信
10 博士生课程 002 计算机 11 博士生课程 002 计算机 12 博士生课程 002 计算机 13 博士生课程 002 计算机 14 博士生课程 002 计算机 15 博士生课程 002 计算机 16 博士生课程 002 计算机
2014-2015学年第一学期研究生课程目录
序号 课程类别 系所 开课院 号 系 课程号 12002351 12002354 12002357 14002306 12003307 12003308 12003315 12003316 12003317 12003320 12003321 12003322 12003323 12003325 12003328 12003334 课序 号 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 压缩感知概论 高级软件工程方法论 高级算法设计与分析 计算智能 企业创新学 企业经济理论 高级经济学专题 产业组织理论 经济学研究方法 工程与项目管理方法论 信息化理论与方法 高级技术经济学 物流复杂系统理论 旅游产业经济学 会计与财务研究方法(博士) 安全管理工效学 第 2 页,共 61 页 课程名 教师名1 教师名2 赵瑞珍 卢苇 卢苇 王志海 张明玉 丁慧平 荣朝和 欧国立 赵坚 刘伊生 刘世峰 林晓言 穆东 张辉 郭雪萌 李森 程小可 13级课程,14级不可选 13级课程,14级不可选 13级课程,14级不可选 13级课程,14级不可选 13级课程,14级不可选 13级课程,14级不可选 13级课程,14级不可选 备注
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a (2)
a (1 )
u
1
j
u
2
j
第二节 模糊神经网络控制
二、基本功能和函数关系
第三层:实现模糊逻辑规则的条件部的匹配,规则节点完成
模糊“与”运算(玛达尼推理法)
fj3
min
u1(3),u2(3),L
u(3) paj3来自f (3) j其中二、三层节点之间的连接权值w(ji3) 1
第二节 模糊神经网络控制
f
5
j
wj5i ui5
(mj5i ji5)ui5
i
i
aj5
f
5
j
ji5ui5
i
则
第
四
层
节
点
与
第
五
层
节
点
之
间
的
连
接
系
数
w
5可
ji
以
看
作
是
m
5
ji
5 ,
ji
遍及第 j 个输出变量的所有语言值。
a (5)
a (4)
u
5
j
u
4
j
a (3)
u
3
j
a (2)
a (1 )
u
1
j
u
2
j
第二节 模糊神经网络控制
二、基本功能和函数关系
第五层
2执行从上到下的信号传输方式,实现了把实验数据反馈
到神经网络中去的目的,提供模糊神经网络训练的样本数据
fj5 yj5
aj5 fj5
第二节 模糊神经网络控制
二、基本功能和函数关系
基于神经元网络的基本模糊逻辑运算
用单个神经元实现钟形隶属度函数,它的激励函数为:
f
net
exp
研究生课程
神经网络、模糊控制及专家系统
张严心
2015
第七章 集成智能控制系统
集成智能控制系统简介 模糊神经网络控制
第一节 集成智能控制系统简介
1. 模糊神经网络系统(FNN)
模糊控制利用专家经验建立起来的模糊集、隶属度函 数和模糊推理规则等实现了复杂系统的控制。
控制器设计是基于人们在操作系统实践中积累的一些经验 知识。通过主观的反复实验得到隶属度函数和模糊控制规 则。
j
u
3
j
u
2
j
u
1
j
第二节 模糊神经网络控制
二、基本功能和函数关系
神经元的输入函数的输出是与其连接的有限个神经元的
输出和连接系数的函数,即
net f u1k ,u2k ,L ukp , w1k , w2k ,L wkp
output oik a f
uik表示与其连接的神经元的输出,wik表述相应的连接权系数; 最常用的神经元输入函数和激励函数是:
第一节 集成智能控制系统简介
2. 神经网络专家系统
专家系统,是一个智能信息处理系统,它处理现实世 界中提出的需要由专家来分析和判断的复杂问题,并采用 专家推理方法来解决问题。
传统的专家系统采用产生式规则和框架式结构,基于符号 的知识的显式表示。
缺点: 专家本人无法用这些规则来表达他们的经验。
解决方法:利用神经网络专家系统,是符号的隐式表示。 它的知识库是分布在大量神经元以及它们之间的连接系数 上的。知识获取只是神经网络的简单训练过程。
神经网络具有两大主要特征:分布表示和学习能力
缺点: 无法处理语言变量,也不可能将专家的先验控制知 识注入到神经网络控制系统中去,使得原本不是“黑箱” 结构的系统设计问题只能用“黑箱”系统设计理论来进行。 它还存在局部收敛问题。
解决方法:利用神经网络的学习功能来优化模糊控制规则 和相应的隶属度函数、将一些专家知识预先分布到神经网 络中去是提出模糊神经网络理论的两个基本出发点。
缺点: 当环境发生变化时,缺乏自我调节和自学习的能力。
解决方法之一:Sugeno提出将规则的自组织问题转化为参 数估计问题。但仍有主观性。
如何把学习机制引入到模糊控制中来?
第一节 集成智能控制系统简介
1. 模糊神经网络系统(FNN)
神经网络由大量连接的神经处理单元组成的,具有高 度的非线性映射能力和自学习能力,能够从样本数据中进 行学习和泛化,计算速度快。
f (2) j
Mxji
m , (2) (2)
ji
ji
ui2 m(ji2) 2
(
) (2) 2
ji
a e (2)
f
(2) j
j
mji,ji:第i个语言变量Xi的第j个语言值隶属函数的中心值和宽度;
mji:一、二层神经元之间的连接权值wji2;
ji:看作是与S函数相类似的一个斜率参数。
注 : 若 用 一 组 节 点 完 成 一 个 隶 属 度 函 数 , 则 每 一 个 节 点 的 函 数 可 以 是 标 准 的 形 式 ( 如 S 函 数 ) , 且 整 个 子 网 络 用 标 准 学 习 算 法 ( 如 反 传 法 ) 进 行 离 线 训 练 实 现 期 望 的 隶 属 函 数 。
模糊化。
a (4)
u
4
j
a (3)
u
3
j
a (2)
a (1 )
u
1
j
u
2
j
第二节 模糊神经网络控制
第五层:
1 执 行 从 下 到 上 的 信 号 传 输 方 式 , 实 现 模 糊 输 出 的 精 确 化 计 算 。
如
果
设
m
5
ji
,
5
ji
分
别
表
示
输
出
语
言
变
量
各
语
言
值
的
隶
属
度
的
中
心
位置和宽度,模拟重心法的精确化计算方法:
net m2
2
式中,net是神经元总输入;m是隶属度函数的中心;
代表隶属度函数的宽度。
第二节 模糊神经网络控制
二、基本功能和函数关系
用 常 规 的 S 神 经 元 表 示 隶 属 度 函 数 。
例如:用神经网络表示一个在实数轴上的语言变量X的
三个语言值“小”,“中”,“大”的隶属度函数,则
a (3)
u
3
j
a (2)
a (1 )
u
1
j
u
2
j
第二节 模糊神经网络控制
二、基本功能和函数关系
第四层:有两种操作模式
1从下到上的传输模式中,实现的是模糊逻辑推理运算。
f
4
j
max
u(4) 1
,
u(4) 2
,L
u(4) p
a(4) j
f (4) j
w(4) ji
1。
2在从上到下的传输模式中,此节点实现的是输出变量的
p
fi wkjiuik i1
aj
1 1 e
f
j
第二节 模糊神经网络控制
二、基本功能和函数关系
第一层:将输入变量值直接传送到下层
fj1 uj1 wj1i 1
aj1 fj1 uj1 xj j 1,2,L n
a (1 )
u
1
j
二、基本功能和函数关系
第二层:用单一节点完成简单的隶属函数,如对一钟形函数
第二节 模糊神经网络控制
神经网络的输入输出节点用来表示模糊控制系 统的输入输出信号,隐含节点用来表示隶属度函数 和模糊控制规则。 一、结构
整个神经网络模型分成五个层次:
第一层:输入节点,用来表示语言变量; 第二层:表示语言变量语言值的隶属度函数(可用单
一神经元或一个小的子网络);
u
4
j
u
5