飞控四元数解算
c++ 姿态角四元数 acc gyro积分

姿态角、四元数、加速度计和陀螺仪积分是指飞行器或无人机在飞行过程中常用的几个重要概念。
这些概念涉及到飞行器的姿态控制、运动状态估计和导航等关键问题。
在实际飞行中,如何准确地获取飞行器的姿态信息,如何运用姿态信息进行控制和导航,是无人机系统设计和飞行控制的关键挑战之一。
本文将从简到繁,由浅入深地探讨c++编程中的姿态角、四元数、加速度计和陀螺仪积分,并结合个人理解,对这些概念进行全面的评估和解释。
一、姿态角1.1 什么是姿态角姿态角是指飞行器相对于某一参考系的姿态信息,通常用欧拉角表示,包括滚转角、俯仰角和偏航角。
在飞行控制中,姿态角可以用于描述飞行器的姿态状态,是飞行控制系统的重要输入之一。
1.2 c++编程中的姿态角在c++编程中,可以通过旋转矩阵或欧拉角来表示姿态信息。
旋转矩阵可以通过三个欧拉角转换得到,而欧拉角则可以通过旋转矩阵反解得到。
在实际编程中,需要注意欧拉角的奇点问题和旋转顺序的选择,以保证姿态信息的准确性和稳定性。
1.3 个人观点和理解在我看来,姿态角作为描述飞行器姿态状态的重要参数,在飞行控制系统中具有不可替代的作用。
在c++编程中,需要充分理解姿态角的数学原理和编程实现,才能更好地应用于飞行控制系统中。
姿态角的选择和转换也是飞行控制系统设计中需要考虑的重要问题之一。
二、四元数2.1 什么是四元数四元数是一种用来表示旋转的数学工具,相比于欧拉角和旋转矩阵具有较好的稳定性和计算效率,是描述姿态信息的重要数学工具之一。
2.2 c++编程中的四元数在c++编程中,可以使用现有的四元数库或自行实现四元数的运算和转换。
四元数的乘法和插值运算是关键的操作,需要在c++程序中加以实现和优化。
2.3 个人观点和理解我认为四元数作为描述旋转的数学工具,具有较好的数学性质和计算效率,在飞行控制系统中有着广泛的应用前景。
在c++编程中,需要充分理解四元数的数学原理和运算规则,才能更好地应用于飞行控制系统中,提高系统的性能和稳定性。
基于四元数的四轴飞行器姿态控制

基于四元数的四轴飞行器姿态控制作者:荆学东潘翔来源:《现代电子技术》2018年第16期摘要:为了实现四轴飞行器的姿态控制,建立四轴飞行器四元数运动学方程,给出了四元数微分方程的解析解和数值解,在此基础上求解出欧拉角。
四轴飞行器采用串级PID控制算法,以欧拉角作为系统外环,补偿后的角速度作为系统内环。
通过Matlab/Simulink仿真,对比单级PID控制效果,验证了算法的可靠性。
最后,搭建了飞行器试验平台,在STM32飞控板上编程实现算法。
实验证明,该控制系统较单级PID具有响应速度快,超调量小等优点,基本满足室外飞行要求。
关键词:四轴飞行器;四元数法; PID控制算法;串级PID;姿态控制;微分方程中图分类号: TN967.6⁃34; TP273 文献标识码: A 文章编号: 1004⁃373X(2018)16⁃0116⁃04Abstract: A quaternion kinematic equation for the quadrotor aircraft is established, the analytical solution and numerical solution of the quaternion differential equation are given, and the Euler angle is solved on this basis, so as to realize attitude control of the quadrotor aircraft. The cascade PID control algorithm is used for the quadrotor aircraft, taking the Euler angle as the outer ring of the system and angular velocity after compensation as the inner ring of the system. The reliability of the algorithm is verified by using the Matlab/Simulink simulation to compare the effects of single⁃level PID control and cascade PID control. The aircraft test platform is established. The algorithm is implemented by means of programming on the STM32 flight control board. The experimental results show that in comparison with the single⁃level PID, the control system has the advantages of faster response speed and less overshoot, which can basically meet the requirements of outdoor flight.Keywords: quadrotor aircraft; quaternion method; PID control algorithm; cascade PID;attitude control; differential equation四轴飞行器与普通的飞行器相比具有结构简单、故障率低及单位体积能够产生更大升力等优点,在军事、民用和科技领域发挥着越来越重要的作用,非常适合在狭小空间内执行任务。
四元数用于飞机姿态解算
q0 q1 q2 q3p0 p0 p1 p2 p3q0
qpq1 q0 q3 q2 p1p1 p0 p3 p2q1
q2 q3
q3 q2
q0 q1
q1p2 p2 q0 p3 p3
p3 p2
p0 p1
p1 q2 p0 q3
四元数的定义和性质
逆元:q1
1
q0 q1i q2 j q3k
q0 q1i q2 j q3k
q0 q1i q2 j q3k q0 q1i q2 j q3k
q0 q1i q2 j q02 q12 q22
q3k q32
q* q2
2
q*q0q1iq2jq3k
q 2
q0 2q12q2 2q3 2
如果 q 1 ,则 q 1 q*
q
2
四元数的定义和性质
除法:分为左除和右除。对四元数 x , p 和 q
0
1
0
y'
z'' sin 0 cos z'
四元数的应用举例(1)
欧拉角表示的地面坐标轴系 S g 与机体坐标轴系S b 的转化
③绕 x '' 轴转动横滚角 ,有S '' Sb
xb 1
yb
0
0
cos
0 x''
sin
y''
zb 0 sin cosz''
综上,按Байду номын сангаасZYX 的转动顺序,由 Sg Sb 的转换矩阵为:
cos2
sin 2
对非标量四元数 R 和R ' :若有 R' qRq1,则:
① 两者的范数和标量部分是相同的 ② R ' 的矢量部分为 R 绕欧拉轴 旋转 角
四元数姿态矩阵地磁融合

发布笔者关于飞行器导航与定位的文章[cpp]view plaincopyprint?1.void MahonyAHRSupdate(float gx,float gy,float gz,float ax,float ay,float az,floatmx,float my,float mz){2.float recipNorm;3.float q0q0,q0q1,q0q2,q0q3,q1q1,q1q2,q1q3,q2q2,q2q3,q3q3;4.float hx,hy,bx,bz;5.float halfvx,halfvy,halfvz,halfwx,halfwy,halfwz;6.float halfex,halfey,halfez;7.float qa,qb,qc;8.9.//Use IMU algorithm if magnetometer measurement invalid(avoids NaN in magnetometer normalisation)10.if((mx==0.0f)&&(my==0.0f)&&(mz==0.0f)){11.MahonyAHRSupdateIMU(gx,gy,gz,ax,ay,az);12.return;13.}14.15.//Compute feedback only if accelerometer measurement valid(avoids NaN in accelerometer normalisation)16.if(!((ax==0.0f)&&(ay==0.0f)&&(az==0.0f))){17.18.//Normalise accelerometer measurement19.recipNorm=invSqrt(ax*ax+ay*ay+az*az);20.ax*=recipNorm;21.ay*=recipNorm;22.az*=recipNorm;23.24.//Normalise magnetometer measurement25.recipNorm=invSqrt(mx*mx+my*my+mz*mz);26.mx*=recipNorm;27.my*=recipNorm;28.mz*=recipNorm;29.30.//Auxiliary variables to avoid repeated arithmetic31.q0q0=q0*q0;32.q0q1=q0*q1;33.q0q2=q0*q2;34.q0q3=q0*q3;35.q1q1=q1*q1;36.q1q2=q1*q2;37.q1q3=q1*q3;38.q2q2=q2*q2;39.q2q3=q2*q3;40.q3q3=q3*q3;41.42.//Reference direction of Earth's magnetic field43.hx= 2.0f*(mx*(0.5f-q2q2-q3q3)+my*(q1q2-q0q3)+mz*(q1q3+q0q2));44.hy= 2.0f*(mx*(q1q2+q0q3)+my*(0.5f-q1q1-q3q3)+mz*(q2q3-q0q1));45.bx=sqrt(hx*hx+hy*hy);46.bz= 2.0f*(mx*(q1q3-q0q2)+my*(q2q3+q0q1)+mz*(0.5f-q1q1-q2q2));47.48.//Estimated direction of gravity and magnetic field49.halfvx=q1q3-q0q2;50.halfvy=q0q1+q2q3;51.halfvz=q0q0-0.5f+q3q3;52.halfwx=bx*(0.5f-q2q2-q3q3)+bz*(q1q3-q0q2);53.halfwy=bx*(q1q2-q0q3)+bz*(q0q1+q2q3);54.halfwz=bx*(q0q2+q1q3)+bz*(0.5f-q1q1-q2q2);55.56.//Error is sum of cross product between estimated direction and measureddirection of field vectors57.halfex=(ay*halfvz-az*halfvy)+(my*halfwz-mz*halfwy);58.halfey=(az*halfvx-ax*halfvz)+(mz*halfwx-mx*halfwz);59.halfez=(ax*halfvy-ay*halfvx)+(mx*halfwy-my*halfwx);60.61.//Compute and apply integral feedback if enabled62.if(twoKi>0.0f){63.integralFBx+=twoKi*halfex*(1.0f/sampleFreq);//integral error scaled by Ki64.integralFBy+=twoKi*halfey*(1.0f/sampleFreq);65.integralFBz+=twoKi*halfez*(1.0f/sampleFreq);66.gx+=integralFBx;//apply integral feedback67.gy+=integralFBy;68.gz+=integralFBz;69.}70.else{71.integralFBx=0.0f;//prevent integral windup72.integralFBy=0.0f;73.integralFBz=0.0f;74.}75.76.//Apply proportional feedback77.gx+=twoKp*halfex;78.gy+=twoKp*halfey;79.gz+=twoKp*halfez;80.}81.82.//Integrate rate of change of quaternion83.gx*=(0.5f*(1.0f/sampleFreq));//pre-multiply common factors84.gy*=(0.5f*(1.0f/sampleFreq));85.gz*=(0.5f*(1.0f/sampleFreq));86.qa=q0;87.qb=q1;88.qc=q2;89.q0+=(-qb*gx-qc*gy-q3*gz);90.q1+=(qa*gx+qc*gz-q3*gy);91.q2+=(qa*gy-qb*gz+q3*gx);92.q3+=(qa*gz+qb*gy-qc*gx);93.94.//Normalise quaternion95.recipNorm=invSqrt(q0*q0+q1*q1+q2*q2+q3*q3);96.q0*=recipNorm;97.q1*=recipNorm;98.q2*=recipNorm;99.q3*=recipNorm;100.}相信有很多人已经理解了加速度计补偿陀螺仪漂移的原理,这部分代码在x-IMU官网上已经给出,大家可以自行下载(/open-source-imu-and-ahrs-algorithms/),有能力的可以自行查看Sebastian O.H. Madgwick在2010年4月发表的一篇论文(An efficient orientation filter for inertial and inertial/magneticsensor arrays),可以发现x-IMU官网上的融合代码就是基于此篇论文。
四轴飞行器姿态控制算法
姿态解算姿态解算(attitude algorithm),是指把陀螺仪,加速度计, 罗盘等的数据融合在一起,得出飞行器的空中姿态,飞行器从陀螺仪器的三轴角速度通过四元数法得到俯仰,航偏,滚转角,这是快速解算,结合三轴地磁和三周加速度得到漂移补偿和深度解算。
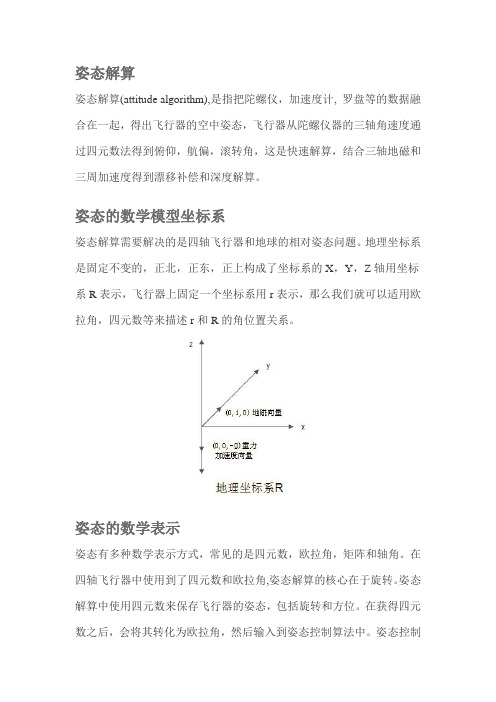
姿态的数学模型坐标系姿态解算需要解决的是四轴飞行器和地球的相对姿态问题。
地理坐标系是固定不变的,正北,正东,正上构成了坐标系的X,Y,Z轴用坐标系R表示,飞行器上固定一个坐标系用r表示,那么我们就可以适用欧拉角,四元数等来描述r和R的角位置关系。
姿态的数学表示姿态有多种数学表示方式,常见的是四元数,欧拉角,矩阵和轴角。
在四轴飞行器中使用到了四元数和欧拉角,姿态解算的核心在于旋转。
姿态解算中使用四元数来保存飞行器的姿态,包括旋转和方位。
在获得四元数之后,会将其转化为欧拉角,然后输入到姿态控制算法中。
姿态控制算法的输入参数必须要是欧拉角。
AD值是指MPU6050的陀螺仪和加速度值,3个维度的陀螺仪值和3个维度的加速度值,每个值为16位精度。
AD值必须先转化为四元数,然后通过四元数转化为欧拉角。
在四轴上控制流程如下图:下面是用四元数表示飞行姿态的数学公式,从MPU6050中采集的数据经过下面的公式计算就可以转换成欧拉角,传给姿态PID控制器中进行姿态控制.PID控制算法先简单说明下四轴飞行器是如何飞行的,四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了。
四轴飞行器飞行过程中如何保持水平:我们先假设一种理想状况:四个电机的转速是完全相同的是不是我们控制四轴飞行器的四个电机保持同样的转速,当转速超过一个临界点时(升力刚好抵消重力)四轴就可以平稳的飞起来了呢?答案是否定的,由于四个电机转向相同,四轴会发生旋转。
我们控制四轴电机1和电机3同向,电机2电机4反向,刚好抵消反扭矩,巧妙的实现了平衡, 但是实际上由于电机和螺旋浆本身的差异,造成我们无法做到四个电机产生相同的升力,这样飞行器起飞之后就会失去平衡。
飞行姿态解算

飞行姿态解算(一)喻时耕宇· 4 个月前大约半年前研究的东西,贴出来给大家分享下,不知到有没有同样想搞四轴飞控的朋友,可能会感兴趣。
如果有业内算法工程师能一起讨论就更好拉。
最近又来研究研究有关飞行姿态解算的算法,看看当时没搞懂的四元数算法。
主要也是学了网上几位大神的资源,才能小有所得。
在这先附上参考一些大神心得的网址:https:///wiki/四元數四元数维基百科https:///wiki/向量向量维基百科【Unity技巧】四元数(Quaternion)和旋转四元数和旋转学习笔记—四元数与欧拉角之间的转换四元数和欧拉角之间的转换[小应用]GD32F103+MPU9150 四轴飞行器第一步:9DOF姿态融合-GigaDevice GD32 MCU论坛 9DOF 姿态融合(需要登录)还有一些没有记录。
忘记地址了。
很多解释上面帖子里都有了。
我想从另一个方向来写这篇文章。
先来说说我了解这个东西的经过吧。
说起对飞行姿态的解算,其实是相当复杂的一个过程,并不像我们一般认为的那么简单。
首先,一开始(包括我自己)一般可能有个误区:姿态不就一个倾角嘛(类比斜面)?所以感觉只需要求一个倾斜角而已,感觉挺简单的。
仔细一想,发现其实有姿态有2个角度,可以想象一个滑梯再像侧面翻滚一下,这样其实对于空间思维不太好的人已经有一点难度了。
然后发现还需要再加一个是描述物体本身自旋的姿态。
那么最后的结论为,姿态总共有3个轴。
那么以我本身的知识来说,如何能够检测出物体姿态的这3个变量呢?总共需要3个传感器。
第一步:+加速度传感器。
说起测量倾斜角,一般能看见的都使用水泡,铅垂线之类的东西。
有传感器使用经验的第一感觉就会觉得使用重力传感器就OK啦。
首先说说重力传感器的原理,这里说的重力传感器又叫加速度传感器。
加速度计和陀螺仪指南(很详细的介绍)了解了这个东西以后,那么问题来了,仅仅靠加速度计能否完成角度的测量?答案是在静态情况下可以,在动态情况下不可以。
四旋翼飞行器 四元数和欧拉角的关系 与 姿态解算

四旋翼飞行器四元数和欧拉角的关系与姿态解算下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!四旋翼飞行器:四元数与欧拉角的关系与姿态解算1. 引言四旋翼飞行器是一种常见的无人机类型,其姿态(即飞行器的方向)通常由欧拉角或四元数来描述。
四元数 四旋翼飞行器姿态解算

四元数四旋翼飞行器姿态解算四元数是用来描述空间旋转的数学工具,在飞行器姿态解算中具有重要的应用。
四旋翼飞行器是一种采用四个电动马达驱动的多旋翼飞行器,通过调节四个马达的转速实现飞行器的姿态控制。
在四旋翼飞行器的飞行过程中,需要实时获取飞行器的姿态信息,以便进行飞行控制。
四元数作为一种有效的姿态描述方法,被广泛应用于四旋翼飞行器的姿态解算中。
四元数是一种具有四个元素的数学结构,通常表示为q = w + xi + yj + zk,其中w、x、y、z分别表示四元数的实部和三个虚部。
四元数可以表示为一个旋转矩阵,通过四元数乘法运算可以实现空间旋转的复合。
在四旋翼飞行器的姿态解算中,通常使用四元数来描述飞行器的姿态状态。
四旋翼飞行器的姿态解算涉及到四元数的插值、积分和旋转等计算。
在飞行器的姿态控制过程中,需要将传感器获取的姿态信息进行融合处理,得到飞行器的姿态状态。
四元数插值可以实现飞行器姿态信息的平滑过渡,提高飞行的稳定性和平顺性。
四元数积分可以实现对飞行器姿态状态的更新,保持飞行器的正确姿态。
四元数旋转可以实现飞行器的姿态控制,使飞行器按照指定的姿态进行飞行。
在四旋翼飞行器的姿态解算中,需要考虑传感器误差、系统延迟和控制精度等因素。
传感器误差会影响到飞行器的姿态感知精度,需要通过滤波算法和校准方法来降低误差影响。
系统延迟会导致飞行器姿态状态的延迟更新,需要通过合理的控制策略来补偿延迟效应。
控制精度是指飞行器姿态控制的准确性,需要通过优化控制算法来提高飞行器的稳定性和精确性。
总的来说,四元数是一种有效的姿态描述方法,被广泛应用于四旋翼飞行器的姿态解算中。
通过四元数插值、积分和旋转等计算,可以实现对飞行器姿态状态的准确解算和控制。
在实际的飞行应用中,需要综合考虑传感器误差、系统延迟和控制精度等因素,全面提高飞行器的姿态解算精度和控制性能。
四旋翼飞行器的姿态解算是飞行控制领域的重要课题,将带来对未来飞行器飞行性能的提升和发展。
基于四元数互补滤波的无人机姿态解算
基于四元数互补滤波的无人机姿态解算本文提出了一种基于四元数互补滤波的无人机姿态解算方法。
该方法通过对四元数的互补滤波来对无人机的姿态进行估计,实现了对无人机运动状态的实时监测和控制。
同时,本文还对该方法进行了实验验证,结果表明该方法具有较高的精度和实用性。
关键词:四元数;互补滤波;无人机姿态解算;估计;监测一、引言随着无人机技术的飞速发展,无人机在军事、民用等领域的应用越来越广泛。
然而,无人机的飞行控制与稳定性问题一直是无人机技术的瓶颈之一。
其中,无人机姿态解算技术是实现无人机飞行控制的关键技术之一。
无人机姿态解算指的是通过传感器采集的数据,对无人机的姿态进行估计和推算,以实现对无人机运动状态的实时监测和控制。
传统的无人机姿态解算方法主要基于欧拉角和旋转矩阵等数学模型,但这些方法存在着欧拉角奇异性和旋转矩阵计算复杂等问题,导致无法满足实际应用需求。
因此,近年来,越来越多的研究者开始探索基于四元数的无人机姿态解算方法。
四元数是一种具有四个实数分量的数学对象,可以用来表示旋转、姿态等信息。
相比于欧拉角和旋转矩阵等传统数学模型,四元数具有计算简单、不存在奇异性等优点,因此在无人机姿态解算领域得到了广泛应用。
而互补滤波是一种常用的信号处理方法,可以对多个信号进行加权平均,从而得到更加准确的结果。
因此,本文提出了一种基于四元数互补滤波的无人机姿态解算方法,以解决传统方法存在的问题。
二、基于四元数互补滤波的无人机姿态解算方法1.四元数表示姿态四元数可以用来表示旋转、姿态等信息,其具有简单的计算方式和不存在奇异性等优点。
因此,本文采用四元数来表示无人机的姿态信息。
四元数可以表示为:q = a + bi + cj + dk其中,a、b、c、d为实数分量,i、j、k为三个虚数分量,满足: i = j = k = ijk = -1四元数可以表示旋转、姿态等信息,其中,a为实部,b、c、d为虚部,表示旋转轴和旋转角度。
mpu6050四元数姿态解算结果

MPU6050是一款常用的三轴陀螺仪和三轴加速度计模块,它可以用于测量和解算飞行器的姿态角,是无人机和其他飞行器项目中常用的传感器之一。
在解算飞行器的姿态角时,使用四元数解算是一种常见且有效的方法。
本文将介绍MPU6050四元数姿态解算的结果,包括其原理、算法和实际应用。
一、MPU6050的工作原理1.1 三轴陀螺仪MPU6050的三轴陀螺仪可以测量飞行器围绕X、Y、Z轴的角速度,其工作原理是利用霍尔传感器测量角速度对应的旋转矢量。
通过积分得到飞行器当前的姿态角速度。
1.2 三轴加速度计MPU6050的三轴加速度计可以测量飞行器在X、Y、Z轴的加速度,其工作原理是利用加速度对应的位移变化,计算得到飞行器的加速度。
1.3 传感器融合MPU6050将三轴陀螺仪和三轴加速度计的数据进行融合,通过卡尔曼滤波等算法得到更为准确的姿态角度。
二、四元数解算姿态角2.1 四元数原理四元数是一种数学工具,用来描述旋转和姿态变换。
在飞行器姿态控制中,通常使用四元数来表示飞行器当前的姿态角。
四元数可以简洁地表示旋转,且在插值和积分运算中具有优势。
2.2 四元数解算算法MPU6050使用四元数解算算法,根据三轴陀螺仪的角速度数据来更新四元数,从而得到飞行器当前的姿态角。
四元数解算算法运用了加速度计和磁力计的数据,使得姿态角的计算更为准确和稳定。
2.3 解算结果MPU6050四元数解算的结果是飞行器当前的姿态角,包括俯仰角、横滚角和偏航角。
这些角度是飞行器在空间中的姿态,对于飞行器的稳定飞行和姿态控制具有重要意义。
三、MPU6050四元数姿态解算的实际应用3.1 无人机姿态控制在无人机项目中,MPU6050四元数姿态解算可以用于无人机的姿态控制。
通过实时更新无人机的姿态角,可以使无人机保持稳定飞行和响应操控信号。
3.2 姿态稳定相机MPU6050四元数姿态解算还可以应用在姿态稳定相机上。
通过获取相机的姿态角,可以使相机在运动中保持稳定,获得更加清晰和稳定的图像。
自适应误差四元数无迹卡尔曼滤波四旋翼飞行器姿态解算方法

mpu6050姿态解算原理_mpu6050姿态解算程序
mpu6050姿态解算原理_mpu6050姿态解算程序关于MPU6050姿态解算原理mpu6050常用作提供飞控运行时的姿态测量和计算,在在姿态结算中有几个重要的概念,欧拉角、四元数等。
欧拉角:用来表征三维空间中运动物体绕着坐标轴旋转的情况。
即物体的每时每秒的姿态可以由欧拉角表出。
四元数:超复数,q=(q0,q1,q2,q3),q0位实数,q1,q2,q3为虚部的实数。
简单的可以理解为四维空间,就是原有的三维空间加入一个旋转角。
而四元数可以表征欧拉角,并且计算方便,故采用四元数来计算。
在此还要提到加速度和磁力计补偿原理,可以参照http://blog.csdn/nemol1990/article/details/21870197?utm_source=tuicool">mpu6050姿态解算程序08.MPU6050\Hardware\ioi2c.c08.MPU6050\Hardware\ioi2c.h08.MPU6050\Hardware\mpu6050.c08.MPU6050\Hardware\mpu6050.h08.MPU6050\Hardware\nrf24l01.c08.MPU6050\Hardware\nrf24l01.h08.MPU6050\Hardware\spi.c08.MPU6050\Hardware\spi.h08.MPU6050\Libraries\CMSIS\CMSISENDUSERLICENCEAGREEMENT.pdf08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Include\stm32f4xx.h08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Include\system_stm32f4xx.h08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\arm\startup_stm32f4 xx.s08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\gcc_ride7\startup_st m32f4xx.s08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\iar\startup_stm32f4x x.s08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\system_stm32f4xx.c 08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\TASKING\cstart_th umb2.asm08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\TrueSTUDIO\startup。
无人机飞控算法-姿态估计-欧拉角-旋转矩阵-四元数

⽆⼈机飞控算法-姿态估计-欧拉⾓-旋转矩阵-四元数⽆⼈机飞控算法-姿态估计此系列记录了我理解的卡尔曼滤波从0到1的过程,从姿态估计到位置估计,我们从核⼼点⼀个个出发,并结合实际模块的应⽤来⼀⼀揭开卡尔曼滤波的神秘⾯纱。
提⽰:在系列⽂章中,我参考了⼤量CSDN,知乎,简书等其他朋友的各种⽂档资料,并从中获益良多,对此表⽰⾮常感谢!在更新的过程中不免出现很多错误,希望⼤家能够及时指出和交流,⼀起学习,⼀起进步!系列⽂章⽬录前⾔作为⼀个⾮控制类出⽣的通信⼯程师,半路出家,还是挺困难的,需要学习的知识很多,主要是卡尔曼滤波⽅⾯的,包含微积分、线性代数、概率统计论、信号与系统、控制论等等。
在⽆⼈机⾥飞控是其中重要的组成部分之⼀,⽽飞控的核⼼就是算法,主要包括姿态估计算法,导航控制算法,PID控制算法,路径规划算法等。
此系列从姿态估计算法⼊⼿,通过IMU的姿态解算来学习姿态估计算法究竟是为何物。
推荐:学习基础知识我推荐⼀下3blue1brown,在B站上可以搜索到他们的课程,讲的很⽣动,可以帮您快速理解⼀些核⼼知识。
⼀、姿态估计是什么?想象⼀下,你拿着⼀根平衡杆,⾛在独⽊桥上,你该如何操控你⼿⾥的平衡杆才能使你不掉下去呢?从主观意识着想,其实挺简单的,如果⾝⼦往左倾斜,我们就把杆⼦向右移,如果⾝⼦往右倾斜,我们就把杆⼦向左移。
要实现这个⽬的,⾸先我们是不是要知道⾝体现在究竟是左倾斜还是右倾斜呢?这就是姿态估计(Attitude Estimator)。
那如何检测姿态呢?这就需要传感器了,在⼈类的⾝上,⼤脑充当了这个⾓⾊,在机器上,我们通过惯性测量单元(IMU)来测量姿态。
⼆、惯性测量单元(IMU)1.陀螺仪陀螺仪是利⽤⾼速回转体的动量矩敏感壳体相对惯性空间绕正交于⾃转轴的⼀个或⼆个轴的⾓运动检测装置。
利⽤其他原理制成的⾓运动检测装置起同样功能的也称陀螺仪。
陀螺仪可感测⼀轴或多轴的旋转⾓速度,可精准感测⾃由空间中的复杂移动动作,因此,陀螺仪成为追踪物体移动⽅位与旋转动作的必要运动传感器。
四元数姿态解算原理

四元数姿态解算原理咱们先来说说姿态解算为啥这么重要。
你想啊,在好多地方都得知道一个物体的姿态,就像咱们玩遥控飞机的时候,如果不知道飞机在空中是啥姿势,是头朝上还是朝下,是横着飞还是斜着飞,那这飞机可就没法好好控制啦。
在机器人领域也是一样的,机器人得知道自己的胳膊、腿是啥姿势才能准确地干活呀。
那四元数是啥呢?简单来说,它就像是一种很特别的数学小工具。
四元数有四个部分,就像四个小伙伴一起合作来描述姿态。
这和咱们平常熟悉的用角度来描述姿态不太一样哦。
平常的角度描述有时候会遇到一些麻烦事儿,比如说会有万向节锁这种讨厌的问题。
就好比你想转动一个东西,结果发现有些方向转着转着就转不动了,就像被锁住了一样,多让人头疼呀。
但是四元数就很聪明啦,它能巧妙地避开这些问题。
想象一下四元数是一个小魔法盒。
这个小魔法盒里面的四个部分相互配合着来表示物体的旋转状态。
比如说有一部分像是负责说物体绕着x轴转了多少,另一部分负责绕y轴,还有的负责绕z轴,最后一部分就像是一个协调员,把前面三个部分协调得妥妥当当的。
在姿态解算的时候呢,就像是一场精彩的接力赛。
传感器会给我们一些数据,这些数据就像是接力赛的第一棒。
比如说加速度计能告诉我们物体受到的加速度,陀螺仪能告诉我们物体旋转的速度。
但是这些数据可不能直接就告诉我们物体的姿态呢,它们还需要经过四元数这个神奇的“加工厂”加工一下。
四元数会根据这些传感器的数据不断地更新自己。
就像它在说:“加速度计给了我这个信息,陀螺仪给了我那个信息,那我就调整一下我自己来表示新的姿态啦。
”这个调整的过程就像是它在做一种很精细的舞蹈动作,每个部分都在按照一定的规则动来动去。
而且四元数在计算姿态的时候特别稳定。
就像一个稳重的老大哥,不管外面的数据怎么波动,它都能比较准确地算出姿态来。
不像有些方法,数据稍微有点风吹草动就慌了神,算出的姿态就乱七八糟的。
再说说四元数在图形学里的应用吧。
你玩游戏的时候有没有想过那些超级酷炫的3D模型是怎么旋转的呀?很多时候就是靠四元数来搞定姿态的。
初学PX4之飞控算法
初学PX4之飞控算法通知:如果你对本站无人机文章不熟悉,建议查看无人机学习概览!!!注意:基于参考原因,本文参杂了APM的算法分析。
本篇文章首先简述了下px4和apm调用姿态相关应用程序出处,然后对APM的DCM姿态解算算法参考的英文文档进行了翻译与概括,并结合源代码予以分析,在此之前,分析了starlino的DCM,并进行了matlab的实现,因为它更加利于理解。
后段时间会对px4的四元数姿态解算进行分析。
姿态控制部分描述了串级PID在APM里的实现流程,同样后期会完善对px4的分析。
最后针对自己平时使用的一些调试技巧进行了总结。
姿态出处分析下面看下重要的一个脚本/etc/init.d/rc.mc_apps,可以知道姿态估计用的是attitude_estimator_q和position_estimator_inav,用户也可以选择local_position_estimator、ekf2,而姿态控制应用为mc_att_control和mc_pos_control。
#!nshif param compare INAV_ENABLED 1 thenattitude_estimator_q startposition_estimator_inav startelseif param compare LPE_ENABLED 1thenattitude_estimator_q startlocal_position_estimator start elseekf2 startfifiif mc_att_control startthenelse# try the multiplatform versionmc_att_control_m startfiif mc_pos_control startthenelse# try the multiplatform versionmc_pos_control_m startfi...而在ardupilot中,姿态解算与控制算法在ArduCopter.cpp 的fast_loop任务中以400Hz的频率运行。
四轴飞行玩具的姿态解算的原理3.点乘与叉乘;四元数
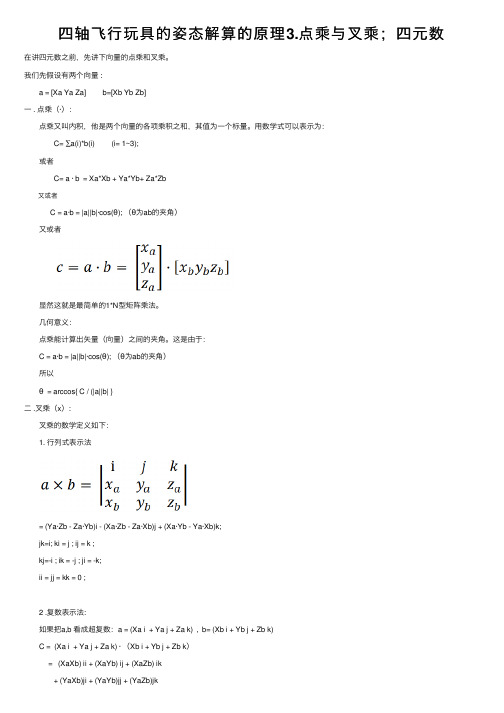
四轴飞⾏玩具的姿态解算的原理3.点乘与叉乘;四元数在讲四元数之前,先讲下向量的点乘和叉乘。
我们先假设有两个向量 :a = [Xa Ya Za] b=[Xb Yb Zb]⼀ . 点乘(·): 点乘⼜叫内积,他是两个向量的各项乘积之和,其值为⼀个标量。
⽤数学式可以表⽰为: C= ∑a(i)*b(i) (i= 1~3); 或者 C= a · b = Xa*Xb + Ya*Yb+ Za*Zb ⼜或者 C = a·b = |a||b|·cos(θ); (θ为ab的夹⾓) ⼜或者 显然这就是最简单的1*N型矩阵乘法。
⼏何意义: 点乘能计算出⽮量(向量)之间的夹⾓。
这是由于: C = a·b = |a||b|·cos(θ); (θ为ab的夹⾓) 所以 θ = arccos{ C / (|a||b| }⼆ .叉乘(x): 叉乘的数学定义如下: 1. ⾏列式表⽰法 = (Ya·Zb - Za·Yb)i - (Xa·Zb - Za·Xb)j + (Xa·Yb - Ya·Xb)k; jk=i; ki = j ; ij = k ; kj=-i ; ik = -j ; ji = -k; ii = jj = kk = 0 ; 2 .复数表⽰法: 如果把a,b 看成超复数:a = (Xa i + Ya j + Za k) , b= (Xb i + Yb j + Zb k) C = (Xa i + Ya j + Za k) · (Xb i + Yb j + Zb k) = (XaXb) ii + (XaYb) ij + (XaZb) ik + (YaXb)ji + (YaYb)jj + (YaZb)jk + (ZaXb)ki + (ZaYb)kj +(ZaZb)kk = (YaZb -ZaYb)i + (ZaXb - XaZb)j + (XaYb-YaXb)k (带⼊j i k 的乘法关系) 3. 矩阵表⽰法 显然,叉乘的结果也可看成⼀个向量: ⼏何意义: 设向量a.b在⼀个平⾯ A 上 C = a x b ,则新向量 c 垂直于平⾯A 如下图所⽰: a·b 可以计算出向量ab 之间的夹⾓ axb 可以计算出向量ab构成的平⾯的朝向 三何为四元数 四元数,是19世纪,由汉密尔顿发明的⼀种数学⼯具。
(转)一种常见的四轴飞行器姿态解算方法分析
(转)一种常见的四轴飞行器姿态解算方法分析全国各地已经陆续开放低空管制,北京也将在2015年全面开放低空领域,这对低空飞行器将是一个十分重大的好消息!低空飞行器也将迎来一个新的发展春天。
实际上,近年四轴飞行器发展相当迅速,国内的航拍水平越来越高,顺丰及亚马逊已在尝试将无人机用于快递行业。
越来越多的人开始关注并研究四轴飞行器。
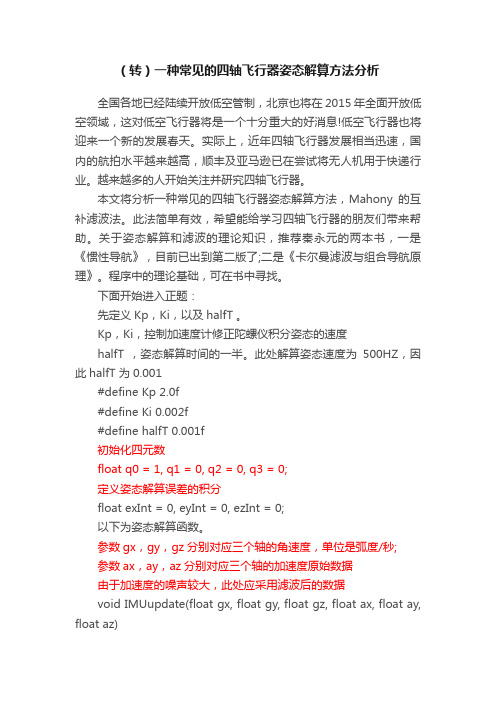
本文将分析一种常见的四轴飞行器姿态解算方法,Mahony的互补滤波法。
此法简单有效,希望能给学习四轴飞行器的朋友们带来帮助。
关于姿态解算和滤波的理论知识,推荐秦永元的两本书,一是《惯性导航》,目前已出到第二版了;二是《卡尔曼滤波与组合导航原理》。
程序中的理论基础,可在书中寻找。
下面开始进入正题:先定义Kp,Ki,以及halfT 。
Kp,Ki,控制加速度计修正陀螺仪积分姿态的速度halfT ,姿态解算时间的一半。
此处解算姿态速度为500HZ,因此halfT 为0.001#define Kp 2.0f#define Ki 0.002f#define halfT 0.001f初始化四元数float q0 = 1, q1 = 0, q2 = 0, q3 = 0;定义姿态解算误差的积分float exInt = 0, eyInt = 0, ezInt = 0;以下为姿态解算函数。
参数gx,gy,gz分别对应三个轴的角速度,单位是弧度/秒;参数ax,ay,az分别对应三个轴的加速度原始数据由于加速度的噪声较大,此处应采用滤波后的数据void IMUupdate(float gx, float gy, float gz, float ax, float ay, float az){float norm;float vx, vy, vz;float ex, ey, ez;将加速度的原始数据,归一化,得到单位加速度norm = sqrt(ax*ax + ay*ay + az*az);ax = ax / norm;ay = ay / norm;az = az / norm;把四元数换算成“方向余弦矩阵”中的第三列的三个元素。
基于四元数解算和模糊PID控制的四轴旋翼机
基于四元数解算和模糊PID控制的四轴旋翼机
夏纪冬;刘子龙;张文文
【期刊名称】《电子科技》
【年(卷),期】2017(030)001
【摘要】针对四轴旋翼机在运动过程中不能较好地保持稳定飞行姿态的问题,系统采用四元数算法对测量磁力传感器造成的常值漂移误差进行校正,采用模糊PID控制算法来调整系统运动姿态,运用Matlab Simulink对Fuzzy PID控制算法进行仿真.实验结果表明,四轴旋翼机控制系统的超调量为6.0%<20%,稳态误差为0.01,具有较好的抗干扰性.在实际飞行测试中,地面站接收的数据显示模糊PID控制具有较好的控制性能.
【总页数】4页(P72-75)
【作者】夏纪冬;刘子龙;张文文
【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093
【正文语种】中文
【中图分类】TP391.9;V249
【相关文献】
1.基于MPU6050的四轴硬件姿态解算研究 [J], 陈国定;周鹏豪;胡朕豪;汤粤生;秦志飞
2.基于四元数的四轴飞行器姿态控制 [J], 荆学东;潘翔
3.基于四元数的四轴无人机姿态的估计和控制 [J], 冀亮;钱正洪;白茹
4.基于MPU6050的四轴飞行器姿态角解算 [J], 时琦
5.基于MPU6050的四轴飞行器姿态角解算 [J], 时琦;
因版权原因,仅展示原文概要,查看原文内容请购买。
大话多旋翼飞行器--欧拉角与四元数

始先绕着 z-轴旋转 角值。然后,绕着 x-轴旋转 角值。最后,绕着 z-轴作角值 的
旋转” 我们通常使用的欧拉角是服从描述A)的。也就是绕着固定于刚体的坐标轴的三个旋转的复 合。为什么呢?因为对物体施加的转矩通常都是相对于物体自身的坐标轴的,控制上更直观 更容易。 另一个问题,欧拉角的三次旋转的旋转轴和旋转顺序。根据维基百科的说法,“在经典力 学里,时常用 zxz 顺规来设定欧拉角;照着第二个转动轴的轴名,简称为 x 顺规。另外, 还有别种欧拉角组。合法的欧拉角组中,唯一的限制是,任何两个连续的旋转,必须绕着 不同的转动轴旋转。因此,一共有 12 种顺规。例如,y 顺规,第二个转动轴是 y‐轴,时 常用在量子力学,核子物理学,粒子物理学。另外,还有一种顺规,xyz 顺规,是用在航空 航天工程学”。
a2通常用 表示,代表升降或俯仰(elevation or pitch)
a3通常用 表示,代表倾斜或横滚(bank or roll)
注意:有些书上a3用φ表示,其实 和φ是同一个字母的两种写法,本质是一样的。
小常识:
根据第一部分的介绍,可以知道,经过三个欧拉角转动后,世界坐标系下的一个矢量 rW=(xW,yW,zW)与其对应的运载体坐标系下的矢量rB=(xB,yB,zB)之间的关系可以表示为
个多体系统提供一个统一的参照坐标系。在物体上要建立一个局部坐标系,称为 BCS(Body Coordinate System),一方面用来描述物体在 GCS 内的位置和姿态,另一方面,为物体上的 点或其它坐标系提供局部的确定位置和姿态的标准。此外,在物体上可以根据需要建立其它 的坐标系,例如,为描述物体上的约束及列写约束方程,需要建立约束的坐标系。 //==========================================================================