雷达机务测量实习指导手册1
雷达测量实习报告
雷达测量实习报告一、实习目的与要求1. 掌握雷达测量原理及基本操作方法;2. 学会使用雷达测量仪器进行实际测量;3. 熟悉雷达测量数据处理及成果分析;4. 培养动手能力、团队协作能力和解决问题的能力。
二、实习任务1. 学习雷达测量原理及基本操作方法;2. 完成指定区域的雷达测量任务;3. 对测量数据进行处理和成果分析;4. 提交实习报告。
三、实习过程与内容1. 学习雷达测量原理本次实习使用的雷达测量仪器为某型号地面三维雷达测量系统。
该系统通过发射和接收高频电磁波,测量目标物体与雷达之间的距离、角度和速度等信息,从而实现对目标物体的三维定位。
实习过程中,我们学习了雷达测量原理、设备组成、工作方式等基础知识。
2. 熟悉雷达测量仪器在导师的指导下,我们学会了雷达测量仪器的基本操作,包括设备的开启、关闭、调整、校准等。
同时,我们还了解了仪器的一些常用参数设置和调整方法,如天线角度、采样频率、脉冲宽度等。
3. 实际测量根据实习任务,我们选取了指定区域进行雷达测量。
在测量过程中,我们严格按照操作规程进行,确保数据的准确性和可靠性。
测量内容包括地面点的三维坐标、地形地貌、建筑物等。
4. 数据处理与成果分析测量完成后,我们对获取的数据进行了处理和分析。
首先,我们对原始数据进行了预处理,包括去噪、滤波等。
然后,利用专业软件对数据进行后处理,生成三维坐标成果、地形图、建筑物图等。
最后,我们对成果进行了分析,评估测量数据的准确性和可靠性。
四、实习收获与体会1. 掌握了雷达测量原理及基本操作方法,了解了雷达测量仪器的工作原理和常用参数设置;2. 学会了实际操作雷达测量仪器,提高了动手能力;3. 熟悉了雷达测量数据处理方法,提高了数据处理能力;4. 培养了团队协作能力和解决问题的能力。
通过本次实习,我们对雷达测量技术有了更深入的了解,认识到了雷达测量在实际工程中的应用价值。
同时,我们也意识到雷达测量工作的严谨性和精确性,为今后从事相关领域的工作奠定了基础。
雷达操作与应用实训指导书
雷达操作与应用目录雷达操作与应用评估规范第一章雷达基本操作与设置第二章雷达观测、定位第三章雷达导航第四章雷达人工标绘第五章雷达自动标绘第六章 AIS报告目标第七章试操船雷达操作与应用评估规范(适用对象:9205、9206 500总吨及以上二/三副、9209未满500总吨二/三副)1.评估目的通过评估,在真实的雷达设备和/或雷达模拟器上,检验被评估者雷达观测、雷达导航和雷达避碰的设备操作和应用能力。
本评估满足STCW公约马尼拉修正案及中华人民共和国海事局海船船员适任考试评估的相关要求。
2.评估内容2.1 雷达基本操作与设置2.2 雷达观测2.3 雷达导航2.4 雷达人工标绘2.5 雷达自动标绘2.6 AIS报告目标2.7 试操船3.评估要素及标准(1)评估要素3.1 雷达基本操作与设置3.1.1 保持清晰观测目标的雷达操作方法①雷达开机前准备工作②雷达开机、核实传感器数据、并调整在最佳观测状态的操作③根据气象海况和航行环境保持清晰观测目标的操作④雷达关机操作3.1.2 准确测量目标位置的操作方法①准确测量目标距离的操作②准确测量目标方位的操作3.2 雷达定位①在评估要素3.1的基础上,雷达目标识别与定位目标的选择②雷达定位方法的选择③雷达定位目标测量方法与保证雷达定位精度的操作3.3 雷达导航①雷达平行线导航操作②雷达距离避险线导航操作③雷达方位避险线导航操作3.4 雷达人工标绘3.4.1转向避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定转向避让措施⑤根据转向不变线判断本船转向后来船的相对运动线的变化方向⑥通过标绘求出具体转向角并核查是否会导致另一紧迫局面⑦操纵船舶进行转向避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航向的时机并采取措施⑩分析产生误差的原因3.4.2变速避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定变速避让措施⑤判断本船变速后来船的相对运动线的变化方向⑥通过标绘求出变速幅度并核查是否会导致另一紧迫局面⑦操纵船舶进行变速避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航速的时机并采取措施⑩分析产生误差的原因3.4.3停船避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定避让措施⑤判断本船停船后来船的相对运动线的变化方向⑥通过标绘求出停船时机(应考虑冲程的影响)并核查是否会导致另一紧迫局面⑦操纵船舶进行停船避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航速的时机并采取措施⑩分析产生误差的原因3.5 雷达自动标绘3.5.1 目标捕获①CPA/TCPA设置准则②目标捕获的含义,建立初始跟踪的过程,目标运动趋势数据的获取③目标手动捕获和自动捕获在不同航行环境中使用的基本原则及其优势与局限性④自动捕获设置方法及抑制区的合理使用3.5.2 目标跟踪①目标稳定跟踪条件判断,目标预测运动数据的获取及其精度判断②在可能发生目标丢失和目标交换条件下的雷达观测与操作③判断目标危险的方法及其操作④本船机动和目标机动对雷达数据的影响3.6 AIS报告目标3.6.1 AIS目标信息①识别AIS休眠目标、激活目标、被选目标、危险目标、丢失目标和轮廓目标②获取AIS目标信息3.6.2 雷达跟踪目标与AIS报告目标融合①AIS辅助雷达避碰的操作②雷达跟踪目标与AIS报告目标融合条件的选择3.7 试操船①启动试操船的准备②雷达跟踪目标与AIS报告目标试操船方法及其操作③判断试操船结果的可行性④利用试操船确定恢复原航向和/或航速的时机(2)评估标准:①操作正确、熟练,回答问题完整准确:100%;②操作正确、比较熟练,回答问题基本准确:80%;③操作正确、熟练程度一般,回答问题尚准确:60%;④操作较差,回答问题错误较多:40%;⑤操作差,回答问题基本不正确:20%;⑥无法完成操作,不能回答出问题:0。
航空雷达操作方法说明书
航空雷达操作方法说明书1. 操作前准备航空雷达操作前需检查设备是否正常工作,包括电源连接、天线设置、通信连接等。
确保雷达处于正常工作状态,以确保飞行安全。
2. 打开雷达启动雷达前,确保电源连接稳定,并按照设备说明书进行操作。
一般来说,按下电源开关,等待雷达启动自检完成。
3. 调整天线天线调整是保证雷达探测性能良好的重要环节。
按照设备指南调整天线方向和仰角,使其与飞机的水平线平行,以获得最佳的雷达返回信号。
4. 雷达校准雷达校准是确保雷达测量准确的关键步骤。
在校准之前,需确保雷达与导航系统连接正常。
根据设备说明书进行雷达校准,通常是通过输入目标经纬度或调整仪表盘上的设置来进行。
5. 调整显示范围根据飞行需求,调整雷达显示范围是必要的。
通过设备操作设置雷达显示范围,可以扩大或缩小显示的范围。
根据不同的飞行阶段,调整雷达显示范围有助于提高搜寻效率。
6. 监控雷达显示雷达显示界面通常提供雷达目标、天气雷达、地势信息等相关数据。
操作员应密切监控雷达显示,及时发现和识别空中目标、天气变化以及地势等信息。
根据飞行需求,调整显示方式,如切换不同的雷达模式或显示过滤设置。
7. 目标识别和跟踪航空雷达可以检测到空中目标,并提供其位置、高度、速度等信息。
操作员需要识别并跟踪这些目标,以确保飞行安全。
根据设备操作指南,在雷达显示上选择目标,通过设置雷达参数进行航空目标的识别和跟踪。
8. 检测天气航空雷达不仅可以探测空中目标,还可以检测天气情况,如降水、雷暴、云层等。
操作员需要密切监测雷达显示上的天气信息,并根据天气情况作出相应飞行调整。
根据设备操作指南,调整雷达显示,选择或过滤相关天气信息。
9. 故障处理在操作雷达过程中,可能会出现各种故障,如信号中断、显示异常等。
操作员需要根据设备说明书,参考故障处理指南,进行相应的故障排除。
必要时,及时与维修人员沟通,并按照其要求进行操作。
10. 关闭雷达飞行任务结束后,需关闭雷达设备。
雷达操作手册
操作说明书FAR-28x7系列FAR-21x7(-BB)系列海华公司内部资料目 录1. RADAR OPERATION雷达操作 (1)1.1 Turning on the Power打开电源 (1)1.2 Transmitter ON发射 (1)1.3 Control Uuit控制单元 (1)1.4 Main Menu主菜单 (1)1.5 Operation Using the On-Screen Boxes屏幕上的操作 (2)1.6 CURSOR Menu光标菜单 (3)1.7 Monitor Brilliance 屏幕亮度 (3)1.8 Choosing the Display Mode选择显示模式 (3)1.9 ON-Screen Boxes and Markers屏幕上的方框和标记 (4)1.10 Tuning the Receiver调谐接收机 (4)1.10.1 Choosing the tuning method选择调谐方式 (4)1.10.2 Initializing tuning初始化调谐 (4)1.10.3 Automatic tuning自动调谐 (5)1.10.4 Manual tuning手动调谐 (5)1.11 Aligning Heading with Gyrocompass调整船首向 (5)1.12 Presentation Modes 显示模式 (5)1.12.1 Choose presentation mode选择显示模式 (6)1.12.2 Description of presentation modes 显示模式介绍 (6)1.13 Entering Own Ship’s Speed输入本船速度 (6)1.13.1 Automatic speed input by log or GPS navigator从计程仪或GPS自动输入速度 (7)1.13.2 Manual speed input手动输入速度 (7)1.14 Choosing the Range Scale选择量程 (7)1.15 Choosing the Pulselength选择脉冲长度 (8)1.15.1 Choosing pulselength 选择脉冲长度 (8)1.15.2 Changing pulselength 改变脉冲长度 (8)1.16 Adjusting the Sensitivity 调节灵敏度 (9)1.17 Suppressing Sea Clutter 抑制海浪干扰 (9)1.17.1 Choosing method of adjustment 选择调节方法 (9)1.17.2 Automatic adjustment by the A/C SEA control调节海浪抑制 (9)1.18 Suppressing Rain Clutter 抑制雨水干扰 (9)1.18.2 Adjusting A/C RAIN调节雨水干扰 (10)1.19 Interference Rejector 干扰抑制器 (10)1.20 Measuring the Range 测量量程 (11)1.20.1 Turning range rings on/off 开/关范围圈 (11)1.20.2 Measuring range by variable range marker(VRM)利用可变距离刻度测量范围 (12)1.20.3 Choosing VRM unit of measurement(B,C and W types)选择VRM度量刻度 (13)1.21 Measuring the Bearing测量方位 (13)1.21.1 Measuring the bearing测量方位 (13)1.21.2 Choosing true or relative bearing选择真方位或相对方位 (14)1.22 Collision Assessment by Offset EBL利用电子方位线估算碰撞 (14)1.22.1 How to assess risk of collision by the offset EBL利用EBL估算碰撞危险 (15)1.23 Measuring Range and Bearing Between Two Targets测量两个目标距离和方位键盘 (15)1.24 Setting a Target Alarm设置目标报警 (16)1.24.1 How to set a target alarm zone怎样设置目标警报区域 (16)1.24.2 Acknowledging the target alarm确认目标报警 (17)1.24.3 Deactivating a target alarm解除目标报警 (17)1.24.4 Target alarm attributes目标报警属性 (17)1.25 Off-entering the Display 关闭中心显示 (18)1.26 Echo Stretch 回波放大 (19)1.27 Echo Averaging回波平均值 (19)1.28 Target Trails目标轨迹 (20)1.28.1 True or relative trails真运动或相对运动轨迹 (20)1.28.2 Trail time轨迹时间 (20)1.28.3 Trail gradation轨迹级别 (21)1.28.4 Saving, copying target trails保存,复制目标轨迹 (21)1.28.5 Trail level轨迹级别 (21)1.28.6 Narrow trails(B,C and W types)使轨迹变窄 (21)1.28.7 Longer trails(B,C and W types)使轨迹更长 (22)1.28.8 Removing trails from the display temporarily临时删除轨迹 (22)1.28.9 Erasing trails消除轨迹 (22)1.29 Parallel Index Lines并行索引线 (22)1.29.1 Displaying, erasing parallel index lines显示,消除并行索引线 (23)1.29.2 Adjusting index line orientation, index line interval调整索引线方位和间隔 (23)1.29.3 Index line bearing reference索引线方位基准 (24)1.29.4 Choosing maximum number of index lines to display选择显示最大数量索引线 (24)1.29.5 Index line mode索引线模式 (25)1.30 Origin Mark原点标记 (25)1.30.1 Entering origin marks输入;原点标记 (25)1.30.2 Origin mark stabilization原点标记稳定性 (26)1.30.3 Deleting individual origin marks删除个别原点标记 (26)1.31 Zoom放大 (26)1.32 Markers标记 (27)1.32.1 Heading marker and heading line航向标记和航向线 (27)1.32.2 Stern marker船尾标记 (28)1.32.3 North marker向北标记 (28)1.32.4 Own ship symbol本船符号 (28)1.32.5 Barge marker闯入目标标记 (28)1.33 Automatic Picture Setup According to Navigation Purpose根据航行目的自动设置雷达 (29)1.34 Programming Function Keys 设计功能键 (29)1.34.1 Activating a function key激活功能键 (30)1.34.2 Programming the function keys设置功能键 (30)1.35 Ship’s Position 本船位置 (31)1.36 Noise Rejector抑制噪声 (31)1.37 Suppressing Second-trace Echoes抑制二次回波 (32)1.38 Adjusting Brilliance of Screen Data调整屏幕亮度 (32)1.39 Watch Alarm监视报警 (32)1.40 Setting Up Nav Data设置导航数据 (33)1.41 Text Window Setup文本窗口设置 (33)1.42 Customizing Operation自定义操作 (34)1.43 Alarms报警 (35)1.44 Choosing the Antenna, Displaying Antenna Information选择天线、显示天线信息 (35)1.44.1 Choosing the antenna选择天线 (35)1.44.2 Displaying antenna information显示天线信息 (35)1.45 Cursor Data光标数据 (35)1.46 Performance Monitor性能监视器 (36)1.47 Wiper擦除器 (36)1.48 Own Ship Symbol本船记号 (36)1.49 Color and Brilliance Sets颜色和亮度设置 (36)1.49.1 Choosing color and brilliance set选择颜色和亮度设置 (37)1.49.2 Presetting color and brilliance set预设颜色和亮度 (37)1.50 Reference Point for CPA/TCPA CPA/TCPA参考点 (37)1.51 Switching Hub HUB-100(option) (37)2.RADAR OBSERVATION (38)3.ARP OPERATION ARP操作 (38)3.1 Usage Precautions使用注意点 (38)3.2 Controls for ARP ARP控制键 (38)3.3 Activating, Deactivating ARP激活,静默ARP (38)3.4Entering Own Ship's Speed输入本船速度 (39)3.4.1 Echo-referenced speed input回波基准速度 (39)3.5 Automatic Acquisition自动获取 (40)3.5.1 Enabling auto acquisition 启动自动获取 (40)3.5.1 Terminating tracking of targets(including reference targets)终止目标追踪(包括参考目标) (41)3.6 Manual Acquisition手动获取 (42)3.6.1 Setting manual acquisition conditions设置手动获取条件 (42)3.6.2 Manually acquiring a target手动获取目标 (42)3.7 ARP Symbols and ARP Symbol Attributes ARP形状及特性 (42)3.7.4 Symbols color and size形状的颜色和大小 (42)3.7.5 Auto target track(A,B,C and W types)自动目标跟踪 (43)3.8 Displaying Target Data显示目标数据 (43)3.8.1 Displaying individual target data显示个别目标数据 (43)3.8.2 Target list目标清单 (44)3.9 Vector Modes向量模式 (44)3.9.1 Description of vectors向量介绍 (44)3.10 Past Position Display历史位置显示 (45)3.10.1 Displaying and erasing past position points, choosing past position plot interval显示和消除历史位置点,选择历史位置标绘间隔 (45)3.10.2 Past position display attributes历史位置显示特性 (45)3.11 Set and Drift角度和漂移(光标位置) (46)3.12 Setting CPA/TCPA Alarm Ranges设置CPA/TCPA报警范围 (46)3.12.1 Setting CPA/TCPA alarm ranges设置CPA/TCPA报警范围 (47)3.12.2 Acknowledging CPA/TCPA alarm应答报警 (47)3.13 Setting a Guard Zone设置警戒区 (47)3.13.1 Activating the guard zone激活警戒区 (47)3.13.2 Sleeping, deactivating a guard zone静默,撤消警戒区 (48)3.13.3 Acknowledging the guard zone alarm应答警戒区报警 (49)3.13.4 Guard zone reference警戒区基准 (49)3.13.5 Guard zone shape and stabilization警戒区形状和稳定性 (49)3.14 Operational Warnings操作警告 (49)3.15 Trial Maneuver (50)3.16 ARP Performance Test ARP性能测试 (50)3.17Criteria for Selecting Targets for Tracking选择跟踪目标的原则 (50)3.18 Factors Affecting ARP Functions影响ARP功能的因素 (51)1. RADAR OPERATION雷达操作1.1 Turning on the Power打开电源打开[POWER]开关,屏幕显示计数时间,当计数器到达0:00时,就会显示”ST-BY”,表示雷达已经准备好发射.1.2 Transmitter ON发射打开电源开关,等待至屏幕出现“ST--BY”字样,才可以按[STBY/TX]键发射;关机时应先停止发射,即先按[STBY/TX]键停止发射,然后才可以关闭电源。
测量实习指导书及记录手簿
XXXXXXXXXXXX学院建筑工程测量实训综合报告书经管院XXXXXXXXX学院实训报告项目名称:建筑工程测量学院: 经管院专业班级:小组成员:指导老师:实习地点:教学区实习时间:2011年11 月28日--2011年12 月18日前言(一)实训目的1、熟悉教材测量内容,进一步了解测量仪器水准仪、经纬仪及皮尺的使用与保养。
熟悉建筑测量的流程与具体操作步骤。
准确无误使用测量计算公式。
2、培养每位同学独立工作能力,严谨的科学态度,同时要发扬相互协作精神。
在实训工作中学会如何与同学沟通解决相互之间不统一的意见,协调好各工作间的关系,并培养每个同学在工作中的应变能力。
培养每个同学吃苦耐劳的精神,实事求是的工作态度。
(二)实训任务1、控制测量2、控制点工程测量3、水平角度测量4、碎不测量5、导线长度测量6、闭合导线内业计算7、测绘地形图(三)实训要求A、平面控制网测量要求1、坐标系统:校内独立坐标系2、根据实训区内的已知点,在实习区内按闭合导线导线的形式布设首级控制网,首级控制网的等级为图根控制;3、导线测量要求(1) 角度测量:用DJ6型经纬仪测量1测回,对中误差应小于1mm,一测回观测过程中,水准管气泡的偏离值不得超过1格,角度半测回互差应不大于40"。
角度闭合差限差:60"n(2) 距离测量用钢尺或全站仪测量。
用钢尺测量时,每条边均应往返测量各1次,往返测互差应小于1/3000;用全站仪测量时,应往测或返测2次,两次互差应小3mm。
导线全长相对闭合差限差:1/2000.B、高程控制网测量要求1、高程系统:校内独立高程系2、高程测量:根据实习区内的已知点,布设一条图根闭合水准作为首级控制网,高差闭合差限差为12n(mm)。
C、碎部测图碎部测图采用经纬仪测绘法, 困难地区可角度交会、距离交会或”测”与”量”结合的方法测量碎部点。
可采用现测现绘或测记法测图。
D、成图要求所有地物符号必须按图例要求绘制,所有地物符号、测点高程及文字注记的方向必须朝北,图外注记应完整。
雷达测量实习报告5篇
雷达测量实习报告5篇雷达测量实习报告篇1一、实习目的透过实地的测量实习,巩固课堂所学的理论知识,熟练掌握水准仪、经纬仪的基本操作,掌握导线测量、三角高程测量、四等水准测量的观测和计算方法,学习如何进行实地的地形控制测量和地形图的展绘、拼接,在实习的同时也体验一下实际测量工作的生活、培养团队协作潜力。
二、实习时间2021年_月_日到2021年_月_日三、实习地点__省蚕桑茶叶研究所四、实习人员__水利水电工程专业全体学生及老师五、实习仪器经纬仪,水准仪,水准尺,尺垫,计算器,记录本,三角板等六、实习计划踏勘选点一天,控制测量三天,控制点坐标计算和展绘一天,地形测量四天,拼图一天(计划十天,实际实习时间为九天)。
七、实习经历及体会2021年_月_日上午,带着愉快的情绪,坐上一路向南的汽车,开始了我们本学期的工程测量实习,这也是我们专业第三次的实习!一个多小时之后,我们来到了我们实习的目的地——__省桑蚕茶叶研究所!在那里不得不介绍一下__省蚕桑茶叶研究所了,__省蚕桑茶叶研究所始建于19__年,经__年的建设,现已发展成集蚕桑、茶叶科学研究与科技服务,农业良种繁育与推广,园林设计与苗木栽培及现代农业展示为一体的科研事业单位。
所内主要经营项目有:蚕种培育、茶叶加工、苗木种植、园林设计和果树栽培等。
我们所住的招待所周围空气清新,树木繁茂,山塘众多,地貌丰富,植被覆盖率超高,而且民风淳朴,安居乐业,的确是旅游观光、休闲度假的理想之地,是人民居住的天堂啊!当日下午,在招待所门前,我们的__老师简单地开了个动员大会,他重申了我们此次实习的好处和要求,强调了应当遵守的一些纪隶和安全事项,还为我们打气,鼓励我们勇敢机智应对将要到来的困难!之后立刻就是踏勘选点,围绕着招待所外面的“8”字圈,我们选取了A·B两条线路,每条12个点,就这样,我们10几个小组被分成4路!接下来的头3天是平面控制测量!我们小组先是用了一天半的时间完成角度测量,然后用一天半来完成高程测量。
雷达操作与应用实训指导书
雷达操作与应用目录雷达操作与应用评估规范第一章雷达基本操作与设置第二章雷达观测、定位第三章雷达导航第四章雷达人工标绘第五章雷达自动标绘第六章 AIS报告目标第七章试操船雷达操作与应用评估规范(适用对象:9205、9206 500总吨及以上二/三副、9209未满500总吨二/三副)1.评估目的通过评估,在真实的雷达设备和/或雷达模拟器上,检验被评估者雷达观测、雷达导航和雷达避碰的设备操作和应用能力。
本评估满足STCW公约马尼拉修正案及中华人民共和国海事局海船船员适任考试评估的相关要求。
2.评估内容2.1 雷达基本操作与设置2.2 雷达观测2.3 雷达导航2.4 雷达人工标绘2.5 雷达自动标绘2.6 AIS报告目标2.7 试操船3.评估要素及标准(1)评估要素3.1 雷达基本操作与设置3.1.1 保持清晰观测目标的雷达操作方法①雷达开机前准备工作②雷达开机、核实传感器数据、并调整在最佳观测状态的操作③根据气象海况和航行环境保持清晰观测目标的操作④雷达关机操作3.1.2 准确测量目标位置的操作方法①准确测量目标距离的操作②准确测量目标方位的操作3.2 雷达定位①在评估要素3.1的基础上,雷达目标识别与定位目标的选择②雷达定位方法的选择③雷达定位目标测量方法与保证雷达定位精度的操作3.3 雷达导航①雷达平行线导航操作②雷达距离避险线导航操作③雷达方位避险线导航操作3.4 雷达人工标绘3.4.1转向避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定转向避让措施⑤根据转向不变线判断本船转向后来船的相对运动线的变化方向⑥通过标绘求出具体转向角并核查是否会导致另一紧迫局面⑦操纵船舶进行转向避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航向的时机并采取措施⑩分析产生误差的原因3.4.2变速避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定变速避让措施⑤判断本船变速后来船的相对运动线的变化方向⑥通过标绘求出变速幅度并核查是否会导致另一紧迫局面⑦操纵船舶进行变速避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航速的时机并采取措施⑩分析产生误差的原因3.4.3停船避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定避让措施⑤判断本船停船后来船的相对运动线的变化方向⑥通过标绘求出停船时机(应考虑冲程的影响)并核查是否会导致另一紧迫局面⑦操纵船舶进行停船避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航速的时机并采取措施⑩分析产生误差的原因3.5 雷达自动标绘3.5.1 目标捕获①CPA/TCPA设置准则②目标捕获的含义,建立初始跟踪的过程,目标运动趋势数据的获取③目标手动捕获和自动捕获在不同航行环境中使用的基本原则及其优势与局限性④自动捕获设置方法及抑制区的合理使用3.5.2 目标跟踪①目标稳定跟踪条件判断,目标预测运动数据的获取及其精度判断②在可能发生目标丢失和目标交换条件下的雷达观测与操作③判断目标危险的方法及其操作④本船机动和目标机动对雷达数据的影响3.6 AIS报告目标3.6.1 AIS目标信息①识别AIS休眠目标、激活目标、被选目标、危险目标、丢失目标和轮廓目标②获取AIS目标信息3.6.2 雷达跟踪目标与AIS报告目标融合①AIS辅助雷达避碰的操作②雷达跟踪目标与AIS报告目标融合条件的选择3.7 试操船①启动试操船的准备②雷达跟踪目标与AIS报告目标试操船方法及其操作③判断试操船结果的可行性④利用试操船确定恢复原航向和/或航速的时机(2)评估标准:①操作正确、熟练,回答问题完整准确:100%;②操作正确、比较熟练,回答问题基本准确:80%;③操作正确、熟练程度一般,回答问题尚准确:60%;④操作较差,回答问题错误较多:40%;⑤操作差,回答问题基本不正确:20%;⑥无法完成操作,不能回答出问题:0。
测量实习指导书

《工程测量学》实习指导书第一部分测量实习须知工程测量是一门实践性很强的技术基础课,测量实习是教学环节中不可缺少的环节。
只有通过操作仪器、观测、记录、计算、绘图、写实习报告等,才能巩固课堂所学的基本理论,掌握仪器操作的基本技能和测量作业的基本方法。
因此,必须对测量实习予以重视。
一、准备工作(1)测量实习之前,必须认真阅读本实习指导书和复习教材中的有关内容,以了解实习目的、要求、方法、步骤和有关注意事项。
(2)按实习指导书中提出的要求,于实习前准备好所需文具,如铅笔(2H或3H)、小刀、计算器、三角板等。
二、实习要求(1)实习分小组进行,组长负责组织和协调实习工作,办理仪器工具的借领和归还手续。
(2)对实习规定的各项内容,小组内每人均应轮流操作,实习报告应独立完成。
(3)实习应在规定时间内进行,不得无故缺席或迟到早退;实习应在指定地点进行,不得擅自改变地点。
(4)必须遵守本书所列的“测量仪器工具的借用规则“和“测量记录与计算规则”。
(5)应认真听取老师的指导,实习的具体操作应按实习指导书的要求、步骤进行。
(6)实习中出现仪器故障、工具损坏和丢失等情况时,必须及时向指导老师报告,不可随意自行处理。
(7)实习结束时,应把观测记录和实习报告交实习指导老师审阅,经老师认可后,方可收拾和清洁仪器工具,归还实验室。
三、测量仪器工具的借用规则测量仪器一般都比较贵重,对测量仪器的正确使用、精心爱护和科学保养,是测量人员必须具备的素质和应该掌握的技能,也是保证测量成果质量、提高测量工作效率和延长仪器工具使用寿命的必要条件。
测量仪器工具的借用必须遵守以下规则:1.仪器工具的借用(1)以小组为单位凭学生证前往测量实验室借领测量仪器工具,每次实习所用仪器工具均已在实习指导书上注明。
(2)借领时,应确认实物与实习指导书上所列仪器工具是否相符,仪器工具是否完好,仪器背带和提手是否牢固。
如有缺损,立即补领或更换。
(3)仪器搬运前,应检查仪器箱是否锁好,搬运仪器工具时,应轻拿轻放,避免剧烈震动和碰撞。
测量实习报告教师指导记录

测量实习报告教师指导记录一、实习目的与要求本次实习的主要目的是让同学们掌握水准仪、经纬仪的基本操作,熟悉导线测量、三角高程测量和四等水准测量的观测和计算方法。
此外,还要求同学们了解地形控制测量和地形图的展绘、拼接等过程,从而提高动手能力和对测量理论知识的深入理解。
同时,培养同学们良好的团队协作意识、严谨的科学态度和迅速解决实际问题的能力。
二、实习任务1. 学习控制点高程测量、导线测量、水准测量和闭合导线内业计算等基本方法。
2. 对学校南、西校区共20个水准点进行四等水准闭合路线的测量,并推算出其他水准点的高程。
3. 完成一个指定区域的导线测量(包括高程),并提交相关成果表、原始记录数据电子表格、布点图、点之记表和导线测量成果的精度报告。
三、实习过程与指导1. 实习前期,老师首先向同学们讲解了水准仪、经纬仪的结构、功能和基本操作方法,以及测量原理和注意事项。
同时,强调了测量工作的重要性、精确性和辛苦程度,让同学们做好充分的心理准备。
2. 实习中期,同学们在老师的带领下,进行实地操作。
在水准测量环节,同学们掌握了水准仪的安置、整平、瞄准与读数等基本操作,并学会了测定地面两点间的高差。
在导线测量环节,同学们学会了全站仪对中、整平、瞄准与读数等基本操作,并能独立完成小地区碎布测量布点工作。
3. 实习后期,同学们在老师的指导下,进行了内业计算和成果整理。
老师强调了内业计算的重要性,要求同学们认真、细心地进行数据处理,确保测量成果的准确性。
此外,老师还指导同学们如何撰写实习报告,让同学们更好地总结实习过程中的收获和不足。
四、实习成果与评价1. 同学们在实习过程中,表现出较强的动手能力和团队协作精神。
大家相互帮助、共同进步,较好地完成了实习任务。
2. 实习成果方面,同学们掌握了水准仪、经纬仪的基本操作,熟悉了导线测量、三角高程测量和四等水准测量的观测和计算方法。
同时,同学们在地形控制测量和地形图的展绘、拼接等方面取得了显著的成果。
雷达测距仪使用方法说明书

雷达测距仪使用方法说明书一、产品简介雷达测距仪是一种用于测量距离的仪器,通过发射无线电波并接收其反射信号来计算目标物体与仪器之间的距离。
本使用方法说明书将详细介绍雷达测距仪的使用步骤、注意事项以及常见问题解答,以帮助用户正确、高效地使用本产品。
二、使用步骤1. 准备工作在使用雷达测距仪之前,请确保具备以下条件:- 电源:将雷达测距仪充电或插入电源适配器,并确保电池电量充足。
- 目标物体:选择需要测量距离的目标物体,并确保其表面平整,并无遮挡物。
2. 打开电源按下电源按钮并保持按压几秒钟,直到仪器开机并显示启动界面。
3. 设置参数使用仪器自带的操作界面,设置测距单位、测量精度以及其他参数,以满足实际需求。
4. 测量距离将雷达测距仪对准目标物体,按下测量按钮进行距离测量。
仪器将发射无线电波,并通过接收被测目标物体反射的波信号来计算距离。
5. 结果显示测量完成后,仪器将在显示屏上显示测得的距离数值。
在需要记录或使用结果时,请及时进行保存。
三、注意事项1. 安全使用- 避免在雷电活动、强电磁场或高温、潮湿等环境下使用本产品,以防止可能的故障或危险。
- 雷达测距仪可能对心脏起搏器等医疗设备产生干扰,请在这些设备附近谨慎使用。
2. 保养与维护- 雷达测距仪为精密电子设备,请轻拿轻放,避免强烈的冲击、振动和摔落。
- 定期清洁仪器表面,避免灰尘和污渍对其正常工作的影响。
3. 距离测量精度- 调整测量精度参数可影响测量结果的精度,根据具体需求进行设置。
- 在室外环境或多目标物体测量时,可能会出现测量误差,请根据实际情况进行使用和判断。
四、常见问题解答1. 无法开机或无显示- 确保电源按钮已正确按下并保持按压。
- 检查电池电量是否低或电源适配器是否连接正常。
2. 测量距离不准确- 检查目标物体表面是否有突出物或遮挡物影响测量结果。
- 调整测量精度参数,以增加测量精度。
3. 无法连接到其他设备- 确保其他设备与雷达测距仪之间的连接线正常插入,并检查连接接口是否干净。
雷达手册

资料EPRS雷达仿真平台是通用化的雷达和雷达测试系统。
该系统有实验室版本和可移动版本,支持外场常规模式调试。
可以通过程序控制来改变雷达类型、工作方式以及信号形式等。
该平台仿真的雷达种类齐全,涵盖的产品范围较广(仿真射频信号载频0.5~18GHz,可以扩展至40GHz)仿真系统为半实物仿真测试设备,可以完成射频信号层次的实时仿真;可以有效的仿真干扰、对抗和杂波等内容。
系统软件可以以C/C++语言建立自己的雷达库,同时也可以使用软件原有的雷达库。
PRS产品简介EPRS,ELDES Programmable RADAR Simulator, 用于评估ECM系统的效果常规的方法是构造一个测试范围,在一种操作环境包括许多船只或飞机。
此方法是非常昂贵的,而且大部分的平台和实时AR无法使用。
在另一方面,仅使用软件仿真,通常情况下,它不那么清楚ECM在敌人的雷达试验系统真正的效果。
事实上,只有在“硬件在回路中”模拟系统可以代表现实。
E- PRS打开新的视角用于雷达电子战系统评估。
系统架构EPRS 主要包括 :微波接收机数字接收机(4通道或更多) 微波发射机可编程信号和数据处理器 雷达发射/接收天线模拟器射频/中频目标/箔条/杂波产生器(E-REG 或其他) 软件编程环境(Framework) 显示和数据收集/分析系统功能结构图EPRS功能组成框图典型构成●可编程微波接收机●可编程微波发射机●数字信号和数据处理器,可编程●雷达天线模拟器(RF/IF)●可编程目标生成器(E-REG,可选)●战情和数据收集软件EPRS可模拟的雷达类型●2D\3D搜索雷达、数据采集、TWS●制导/火控●波束交叠(不同的类型)●空基PD雷达●半主动导引头●主动导引头●搜索和跟踪(多功能)●跟踪(机械和电子扫描)●导航雷达●LPI雷达典型用户●ESM/ECM 制造商●电子战EW战略和战术规划●雷达制造商(电子反干扰评估)●飞行员和电子战设备EW操作者(训练)GRS通用雷达模拟器产品GRS是完整的雷达仿真系统,基于实际的雷达硬件和软件。
倒车雷达实习指导书
倒车雷达一、实训目的1、了解常见倒车雷达的类型和型号。
2、掌握倒车雷达的安装方法。
二、实训要求1、能够按照正确的装饰方法进行装饰。
2、严格对倒车雷达安装操作规范进行安装,防止出现无效的安装。
三、实训课时共6课时四、实训工具1、特殊钻头、手电钻2、导线3、绝缘胶带五、实训耗材1、倒车雷达组件2、油漆六、相关知识(一)、倒车雷达的发展史倒车雷达是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右操视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高驾驶的安全性。
经过几年的发展,倒车雷达系统已经过了六代的技术改良,不管从结构外观上,还是从性能价格上,这六代产品都各有特点,使用较多的是数码显示、荧屏显示和魔幻镜倒车雷达这三种。
第一代倒车喇叭提醒“倒车请注意”!想必不少人还记得这种声音,这就是倒车霄达的第一代产品,现在只有小部分商用车还在使用。
只要司机挂上倒档,它就会响起,提醒周围的人注意。
从某种意义上说,它对司机并没有直接的帮助,不是真正的倒车霄达。
点评:汽车在倒车状态,语音提示路人小心,但价格便宜,lOO 元左右就能买到,基本属于淘汰产品。
第二代蜂鸣器提示这是倒车雷达系统的真正开始。
倒车时,如果车后l.8米~1.5米处有障碍物,蜂鸣器就会开始工作。
蜂鸣声越急,表示车辆离障碍物越近。
点评:没有语音提示,也没有距离显示,虽然司机知道有障碍物,但不能确定障碍物寓车有多远,对驾驶员帮助不大。
价格在200-400元之间。
第三代数码波段显示比第二代进步很多,可以显示车后障碍物寓车体的距离。
如果是物体,在1.8米开始显示;如果是人,在0.9米左右的距离开始显示。
这一代产品有两种显示方式,数码显示产品显示距离数字,而波段显示产品由三种颜色来区别:绿色代表安全距离,表示障碍物离车体距离有0.8米以上;黄色代表警告距离,表示离障碍物的距寓只有0.6~0.8米;红色代表危险距离,表示寓障碍物只有不到0.6米的距离,你必须停止倒车。
测量实习指导书(测绘)
测量学实习指导书一、实习目的测量学实习是《测量学》课程的重要组成部分,是巩固和深化课堂所学知识的必要环节。
通过实习,学生对测量学的理论、技术和方法有全面的理解,熟悉测量工作的流程,把感性认识与理性认识相融合,提高处理实际问题的能力。
通过实习培养学生理论联系实际、分析问题与解决问题的能力以及动手能力。
掌握地形图测绘的整个过程。
二、实习时间、地点实习时间:二周(每周5个课时)实习地点:校园图书馆与实验楼三、实习人员组织实习按组进行,每班分成若干小组,每组5~6人,设组长一名,负责全组的实习分工和仪器管理,并及时向指导老师汇报相关情况。
四、实习仪器1、实习仪器:水准仪(含脚架),经纬仪(含脚架)、水准尺一对。
(具体仪器的型号和数量,以实验员分发为准)2、自备工具:红油漆、钉、外业观测记录手簿,白纸一张、工具袋。
五、实习内容以小组为单位进行。
1、布设和施测一条4~6个点的闭合导线控制测量(要求考虑到后续的碎部测量)。
2、在控制测量的基础上进行规定范围内的碎部测量。
3、对闭合导线进行四等闭合水准测量。
4、在A3纸绘制一幅比例尺为适宜的地形图。
六、实习过程(一)、平面控制:1、导线点选择:要求每组在测区内选择导线点4~6个,并按逆时针编号,编号方式为:班级代码+组号+点号。
选点时注意:(1)控制点只需要选择在测区范围内,不需要包围整个测区范围。
(2)相邻导线点不能高差起伏太大,也不能跨过花坛,尽量沿路边布设,便于量距。
(3)相邻导线点必须通视,以便测角。
(4)选好的导线点需在地面上用红漆标定,并编号。
导线布设具体技术参数如下:2、水平角测量:用经纬仪对布设的控制点所围成的多边形内角进行测量,填写测回法观测水平角记录表。
3、距离丈量:用电磁波测距仪进行测距,要求往返测距,求平均值。
4、起始边定向:按着自由设站的形式建立坐标系,x正方向指北,y正方向指南。
5、闭合导线坐标计算,填闭合导线坐标计算表。
起算点坐标假定为(500,500)。
雷达设备操作指南说明书

雷达设备操作指南说明书一、前言本操作指南是针对雷达设备进行的详细操作指导,旨在帮助用户正确有效地使用雷达设备。
请在使用前仔细阅读本指南,并按照指导进行操作,以确保设备的正常运行和精准探测。
二、设备概述雷达设备是一种利用无线电波进行目标探测和测距的高精度设备。
它可以广泛应用于民航、海事、军事等领域,用于目标探测、导航引导、防空作战等任务。
本设备操作指南适用于所有雷达设备,并包含了设备的基本组成部分和功能描述。
三、设备安装与连接1. 设备安装:a. 将雷达设备放置在平稳的工作台面上,确保设备稳定无晃动。
b. 检查设备周围环境,确保通风良好,无遮挡物。
c. 将天线与设备连接,确保连接牢固。
2. 电源连接:a. 将设备的电源线连接到电源插座,并确保连接稳固。
b. 检查设备电源指示灯是否正常亮起,确认设备已成功开启。
四、设备操作步骤1. 打开设备:a. 按下设备的电源开关,待设备启动完成。
b. 检查设备屏幕是否正常显示,确认设备已成功开启。
2. 设备校准:a. 进入设备菜单界面,选择校准功能。
b. 根据设备的校准指导,进行雷达设备的校准操作。
c. 完成校准后,检查校准结果是否正常,确保设备准确无误。
3. 设备参数设置:a. 进入设备菜单界面,选择参数设置功能。
b. 根据实际需求,设置设备的工作模式、灵敏度、范围等参数。
c. 确认设置完成后,保存参数并退出菜单界面。
4. 目标探测:a. 将设备放置在理想的探测位置,确保视野开阔。
b. 确保设备的天线正确对准目标区域。
c. 按下设备的开始探测按钮,等待设备完成探测。
d. 检查设备屏幕上的目标信息,进行分析和判断。
5. 数据处理与导出:a. 设备支持数据存储功能,可以将探测到的目标数据进行保存。
b. 根据需要,选择导出数据的格式和方式,如USB传输、网络传输等。
c. 将设备连接到指定的设备或网络,进行数据导出操作。
五、设备维护与保养1. 设备清洁:a. 关闭设备并断开电源,待设备完全停止工作。
雷达实验指导书(第一版)ver2

触发脉冲 产生器
视频信号(同轴)
开关电源
调制信号 产生器
超外差接收机
伺服电机
光栅轮
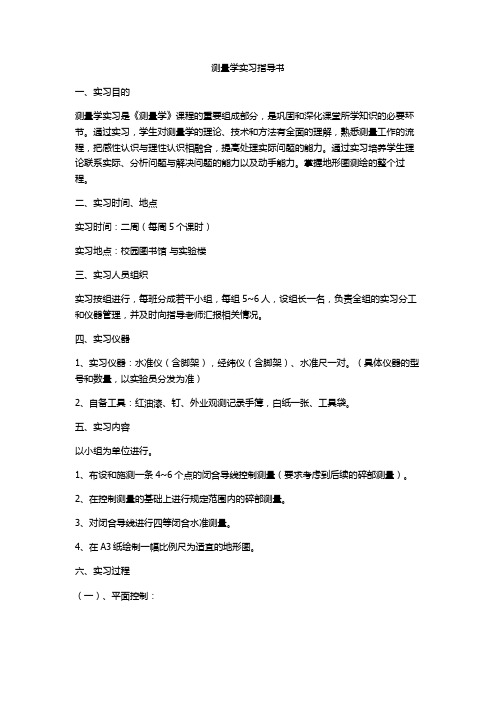
图 2 FAR-2127 功能模块及其连接关系示意图
T/R 组件安装在天线的基座内,主要由触发脉冲产生器、调制信号产生器、 开关变压器、磁控管、环形器、超外差接收机组成,通过差分信号线受控于雷 达信号处理板(SPU);回波视频信号通过同轴电缆传递至 SPU。此外,天线旋 转所需要的伺服电机电源也是由 SPU 控制的开关电源通过电缆直接输送的。 天 线 的 伺 服 电 机 主 轴上 含 有 光 栅 轮 , 用 于产 生 天 线 方 位 角 脉 冲 Bearing Pulse(BP);天线主齿轮和其支撑瓦上含有一对磁感应器件,用于产生天线对北 脉冲 Heading(HD),均通过差分信号线传递至雷达主机。
前言
“雷达专业实验室”位于科 C508,拥有 4 套 FAR2117 船用雷达、4 台 DPO7054 数字示波器和其他配套设备,能同时开设 40 个学生的雷达专业实验。4 套雷达 中 1 部雷达放在实验室,用于对学生开展雷达系统结构与组成的认知实验,3 部雷达架设在科 C 楼顶,用于其他实验项目的开设。
型号
FAR-2117
FAR-2127
工作频率
9410MHz+30MHz
最小发射脉宽
70ns
脉冲重频
3000Hz
发射功率
10KWΒιβλιοθήκη 25KW天线长度6.5ft
8ft
天线指向性
H: 1.23° V: 20°
H: 0.95° V: 20°
天线转速
24rpm 或 42rpm(可选)
噪声系数
10dB
FAR-2117 是标准的非相干脉冲实孔径成像雷达,整机分成四部分如图 1。
测量实习报告手册
一、前言测量实习是测绘工程专业学生的重要实践环节,旨在通过实际操作,加深对测量理论知识的学习和理解,提高学生的实际操作技能和团队协作能力。
本手册旨在为学生提供一份全面的实习指导,帮助学生在实习过程中更好地完成任务,提高实习效果。
二、实习目的1. 巩固和加深对测量理论知识的理解;2. 提高实际操作技能,熟练掌握测量仪器的使用;3. 培养团队协作意识,提高沟通与协调能力;4. 增强对测量工作的责任心和敬业精神;5. 为今后从事测绘工作打下坚实基础。
三、实习内容1. 测量仪器操作与维护(1)水准仪、经纬仪、全站仪等仪器的操作方法;(2)仪器的检校与维护;(3)水准尺、脚架等辅助工具的使用。
2. 水准测量(1)水准点的选择与布设;(2)水准路线的布设与观测;(3)水准计算的原理与方法;(4)水准测量的精度分析。
3. 经纬仪测量(1)经纬仪的使用方法;(2)角度测量的原理与方法;(3)角度测量的精度分析。
4. 全站仪测量(1)全站仪的使用方法;(2)三维坐标测量的原理与方法;(3)三维坐标测量的精度分析。
5. 地形测绘(1)地形图测绘的原理与方法;(2)等高线、地物符号的绘制;(3)地形图的比例尺与精度。
6. 图根控制测量(1)图根控制网的布设;(2)控制点坐标的测定;(3)图根控制网的平差计算。
四、实习步骤1. 实习前准备(1)了解实习内容、目的和任务;(2)熟悉实习场地,了解实习区域的地形、地貌;(3)准备好实习所需的仪器、工具和资料。
2. 实习过程(1)按照实习指导书的要求,完成各项测量任务;(2)认真记录测量数据,确保数据的准确性和完整性;(3)及时总结实习过程中的问题,与指导老师沟通,寻求解决方案。
3. 实习总结(1)整理实习过程中的数据,进行计算和分析;(2)撰写实习报告,总结实习收获和体会;(3)对实习过程中出现的问题进行反思,提出改进措施。
五、实习注意事项1. 严格遵守实习纪律,服从指导老师的安排;2. 爱护实习仪器,注意仪器的安全使用;3. 认真观察实习现场,了解测量工作的实际操作流程;4. 加强团队协作,共同完成任务;5. 保持良好的工作态度,认真对待每一个实习环节。
雷达上机实习报告

一、实习背景为了提高我国雷达技术水平,培养具备雷达设计、调试和维修能力的人才,我参加了为期两周的雷达上机实习。
实习期间,我在导师的指导下,对雷达系统进行了深入学习和实践操作。
二、实习内容1. 雷达原理学习实习初期,我们重点学习了雷达的基本原理,包括雷达的组成、工作原理、信号处理和雷达系统性能分析等。
通过理论学习,我对雷达系统有了初步的认识。
2. 雷达系统组成及功能在了解了雷达原理的基础上,我们进一步学习了雷达系统的组成及功能。
雷达系统主要由天线、发射机、接收机、信号处理器和显示器等部分组成。
通过实际操作,我们掌握了各部分的功能和相互关系。
3. 雷达调试与维护实习期间,我们进行了雷达系统的调试与维护。
在导师的指导下,我们学会了如何进行雷达系统的组装、调试和故障排除。
通过实际操作,我们提高了雷达系统的调试和维护能力。
4. 雷达性能测试与分析为了检验雷达系统的性能,我们进行了雷达性能测试与分析。
通过测试,我们掌握了雷达系统的各项性能指标,如探测距离、灵敏度、分辨率等。
同时,我们还分析了雷达系统在实际应用中可能遇到的问题及解决方法。
三、实习收获1. 提高了理论知识水平通过实习,我对雷达原理、雷达系统组成及功能有了更加深入的了解,为今后从事雷达相关领域的工作打下了坚实的基础。
2. 增强了实践操作能力在实习过程中,我们进行了大量的实践操作,提高了动手能力。
通过组装、调试和维修雷达系统,我们掌握了雷达系统的调试与维护技巧。
3. 培养了团队协作精神实习期间,我们分组进行雷达系统调试与维护,培养了团队协作精神。
在解决问题过程中,我们学会了相互沟通、分工合作,提高了团队凝聚力。
4. 了解了雷达技术发展趋势实习过程中,我们了解了雷达技术在我国的发展现状和未来趋势,为今后从事雷达领域的研究和工作提供了有益的参考。
四、实习总结雷达上机实习是一次宝贵的学习机会。
通过实习,我们不仅掌握了雷达系统的基本原理和调试技巧,还提高了团队协作能力和实践操作能力。
雷达巡检作业指导书
雷达巡检作业指导书
1.目的:经过信号工对雷达的电气、机械特性按作业要求及作业标准巡检后,确保在一定周期内雷达达到驼峰控制信号设备的工作要求、技术质量标准的要求。
2.适用范围:驼峰信号工岗位。
3.作业内容:
3.1雷达安装装置检修。
3.1.1雷达基础面清扫检查。
3.1.2雷达箱盒外部检查。
3.2试验调整销记
4.作业材料、工具:
5.检修作业程序:
6.作业安全注意事项:
6.1雷达检修完毕后,要注意把显示屏关闭。
6.2雷达天线前方的杂草要清除,避免影响雷达测速
6.3到达作业现场后,必须与室内联系,向电务值台人员说明作业地点、设备编号及作业人姓名。
6.4作业现场必须按规定设防护人员。
6.5严格执行七严禁制度。
6.6室内电务值台人员及时通知室外防护人员列车运行情况,现场必须按规定提前下道,执行双线避车制
6.7联系试验要彻底,执行复诵制度。
6.8测试工作要正确使用仪表。
6.9作业时注意来往车辆保证人身安全,工具材料不要
侵限。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为 1kHz;
.从频谱分析仪上读取中心频率处信号噪声功率比值填入表中;
.根据下式计算出接收机在带宽为 1MHz 处的灵敏度。
( ) Prmin
= Pin + S N (dB) +10 log
B 1Mhz
注:其中 Pin 为信号源输入功率,B 为频谱仪的分析带宽(RBw)。
测试项目 Pin (dBm) S/N(dB) 灵敏度(dBm)
发射机脉冲检波包络测试实验 1. 引言
发射机射频脉冲检波包络的测试是衡量发射机性能指标的一种直观、 准确和重要的方法,同时,其波形质量还在一定程度上反映了发射机的工 作状态、稳定性和频谱特性等。脉冲宽度测试的仪器主要采用数字示波器, 其测试连接框图如下:
接收机激励
发射机
高方向性 定向耦合器
假负载
始尾 定时器
目前对发射信号的单边带相位噪声指标的测试,已经突破了过去测试 设备复杂、测试过程繁琐、测试不准确的难关,而且已经有很多型号的高 质量、搞分辨率和大动态范围的频谱分析仪,可以用来测试发射信号的相 位噪声。
对脉冲雷达发射机来说,其频谱是一系列离散的多根谱线,其谱线包
络幅度为 sin(x)/ x ,谱线之间的间隔为脉冲重复频率 Fr。它的函数的第一个
料 雷达电培子训工气资程探学测@C院学UI院T.2010
大权 版
发射机功率测试实验
1. 引言
国内布网的多普勒天气雷达均为脉冲雷达,发射机工作在脉冲状态。
因此,雷达发射机的输出功率测试是指对脉冲功率(峰值功率)和平均功
率这两项指标进行测试。在脉冲工作比(或称占空比)一定的情况下,脉
冲功率和平均功率存在着确定关系,即:
接收机动态范围的表示方法有多种,常用的有 1dB 增益压缩点的动态范 围和无失真信号动态范围,通常用 1dB 增益压缩点的动态范围来表征接收 机的动态范围。1dB 增益压缩点动态范围的定义为:当接收机的的输出功 率大到产生 1dB 增益压缩时,输入信号的功率与可检测的最小信号(即灵
料 敏度 Psmin)或等效噪声雷功达电率之培子比训工气。资程探学测@C院学UI院T.2010
接收机激励
发射机 始尾 定时器
高方向性 定向耦合器
衰减器
假负载
峰值/平均 功率计
2. 实验目的
图 1 发射机脉冲功率测试连接框图
(1) 了解发射机脉冲功率测试原理
(2) 学会使用微波平均功率计测试发射机平均功率
(3) 学会通过发射机平均功率和脉冲工作比计算发射机脉冲功率
3. 实验内容
功率计校准
使用微波平均功率计前需先对其进行功率校准。首先将功率探头连接至
大权 版
δ = ΔA ×100% A
发射机检波包络测试记录表
τ(μs)
τr(ns) τf(ns)
公式(1)
A(mV) ΔA(mV) δ(%)
4. 实验主要设备(仪器) 1) 数字示波器 1 台 2) 平衡检波器一只
5. 思考题:
1) 如果脉冲宽度偏窄可能是什么原因? 2) 脉冲顶部不平坦可能与发射机哪些部件有关?
版
其中:
P = Pi + Ls
公式(3)
Pi 为功率计读数,
Ls = Lr + L +c Lo 即系统插损=路径插损+定向耦合器耦合比+固定衰减值
发射机脉冲功率测试记录表
P (mW)
∧
P (kW)
D(‰)
Fr(Hz)
τ ( μ s)
4. 实验主要设备(仪器) 1) 微波平均功率计 1 台 2) 平均功率计探头一只
高方向性 定向耦合器
衰减器
假负载
频谱仪 图 2 发射机动目标改善因子测试连接框图
S/N
1/2Fr
Fr 图 3 动目标改善因子测试频谱示意图
其中:S/N 为信号噪声功率比 Fr 为脉冲重复频率
2. 实验目的
( ( ( 3.123) ) )实验掌 了 学内握 解会容发发使射射用机机频动动谱目目仪标标测雷改改试善善发达电因因射培子子 子机训工气的 的动资程探物 测目料学理 试标测@C意 方改院学UI义 法善院T因.2子010 大权 版
料 雷达电培子训工气资程探学测@C院学UI院T.2010
大权 版
接收机动态范围测试实验 1. 引言
在实际的雷达信号环境下,进入接收机频带的信号频谱很多,除了有用 信号频谱外,还有杂波和干扰信号频率。脉冲多普勒雷达接收机信号回波 频谱中除了包括高度杂波、主瓣杂波、旁瓣杂波以及多个目标杂波之外还 有接收机内部噪声。如果雷达接收机是一个理想的线性系统,这些信号经 过接收机放大、变频、检波等变换,再经过数字信号处理后便能提取出目 标信号。但是接收机总是存在某种程度的非线性,并且由于这种非线性作 用使得接收信号的频谱总会有些变化。例如,进入接收机的各种回波信号 的交调会产生两个或多个新频率信号,若非线性所产生的信号超过检测门 限,则会形成“虚警”,为了保证“虚警”在一定的限度内,就必须提高检 测门限,这样将会降低雷达对小信号的识别能力,或者说可能产生“漏警”。 因此这就要求雷达接收机具有很大的线性动态范围,以保证雷达探测的准 确性和有效性。
5. 思考题:
1) 如何在平均功率计中输入脉冲工作比从而直接读出脉冲功率? 2) 脉冲功率的值与哪些测量因素有关? 3) 脉冲功率偏低会导致何种结果? 4) 可以采取哪些手段提高脉冲功率?
料 雷达电培子训工气资程探学测@C院学UI院T.2010
大权 版
发射机动目标改善因子测试实验 1. 引言
现代高性能雷达对发射机提出了更高的要求,尤其是动目标显示雷达 和脉冲多普勒雷达,对发射机目标改善因子(即单边带相位噪声)提出了 很高的指标要求。
料 出 的 2(.功功1实)率率验了,即目解使为的接接雷收收达机机接灵的收敏输机度出的雷的功灵物达电率敏理培子大的度意指。训工气义示资程探权值学测@为C院学U前I者院T.的20210倍,此时接收机输入端
版
(2) 掌握接收机灵敏度直接测试法测试要领 (3) 熟练使用频谱分析仪测试接收机灵敏度 3. 实验内容
衰减器
检波器
示波器
2. 实验目的
图 1 发射机脉冲宽度测试连接框图
(1) 了解发射机脉冲宽度测试意义
(2) 学会使用检波器和数字示波器测试发射机检波包络的时域特性
(3) 学会分析发射机检波包络异常的问题出处
3. 实验内容
信 固号 定测 如由 值图试雷 ,1系达加连统信高接连号压测接定后试时,系器在统提示,雷供波用达电,器接培子但上收必 即机训工气须 可频资程探将 测率料学测@雷 试源C院学U达 到激I脉 发院励T.冲 射信20重 机号1复 输作0 频 出为率 波激和 形励脉 。源冲 其,宽 波定度 形时设 示触为 意发 大权 版
大权 版
图 1 1dB 增益压缩点动态范围示意图 测试接收机动态范围,需先对接收机灵敏度进行测试(参考接收机灵敏 度测试实验指导书),再测出 1dB 压缩点,二者的比值即为接收机动态范围。 2. 实验目的 (1) 了解接收机动态范围的物理意义 (2) 熟悉使用频谱分析仪测试接收机动态范围 (3) 深入了解接收机动态范围对雷达系统性能的影响。 3. 实验内容 测试系统连接 按图 2 连接框图连接好测试系统,用外部射频信号源在接收机保护器前 端注入射频信号,将接收通道输出接入频谱仪。
测试系统连接
按图 2 连接框图连接好测试系统,用接收机频率源激励信号作为激励
源,定时触发信号由雷达信号定时器提供,并按表中要求设定雷达脉冲重
复频率和脉宽,控制发射机加高压后,在频谱仪上分析发射信号频谱。
由于频谱仪输入功率限制,需在定向耦合器输出串接固定衰减器后再接
入频谱仪。对于动目标改善因子的测试要求很高的灵敏度,故应选择高灵
B(Hz)
S/N (dB)
I (dB)
4. 实验主要设备(仪器)
51). 思高 20灵d考发B敏题射固度:机定、动衰大目减动标器态改一范善只雷围因频子达电谱直培子仪接训工气影1资程探台响料学到测@C雷院学UI达院T系.2统01哪0些指标? 大权 版
2) 影响发射机动目标改善因子的因素有哪些?
料 雷达电培子训工气资程探学测@C院学UI院T.2010
—
∧
P
=
P
D
公式(1)
∧
—
其中 P 为发射机脉冲输出功率, P 为平均输出功率,D 为工作比,即
D
=
Fr
×τ
=
τ T
公式(2)
其中τ 为射频脉冲宽度, Fr 为脉冲重复频率,T 为脉冲重复周期。
对发射机脉冲功率测试通常分为直接测试法和间接测试法。直接测试
法即采用微波峰值功率计在发射机定向耦合输出端直接测试,读出发射机
料
雷达电培子数据训工气资程探学测@C院学UI院T.频2谱01仪0
备注 RBW=1KHz
大权
版
4. 实验主要设备(仪器) 射频信号源 一台 频谱分析仪 一台
5. 思考题:
1) 接收机灵敏度测试受哪些因素影响? 2) 为何频谱仪的 RBW 设得比真实带宽更小? 3) 测量灵敏度时为何不采用 3dB 法则,而用等效带宽方式?
敏度、大动态范围的频谱仪。
动目标改善因子测试
调整频谱仪分析带宽 B 为 10Hz,中心频率设定为发射机发射频率,按
图 3 测试频偏值为 Fr/2 处的信噪比 S/N,按下式计算出发射机动目标改善
因子 I。
I = S/ N+10logB−10logFr
公式(1)
发射机动目标改善因子测试记录表
Fr (Hz)
零值出现在相对于载频为 ± 1 的频率上(τ 为脉冲宽度),载波能量分布在
τ
各个频谱分量上,且随工作比增加。其频谱示意图如下:
料 发射机动目标改图善1 因脉雷冲子达信电测号培子试频谱连训工气离接资程探散框谱学测@线图C(院学U如1理I/τ院下T想.矩:2形0脉10冲)