L298N_电机驱动模块_程序书
2021年L298N电机驱动模块详解

L298N电机驱动器使用说明书欧阳光明(2021.03.07)注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
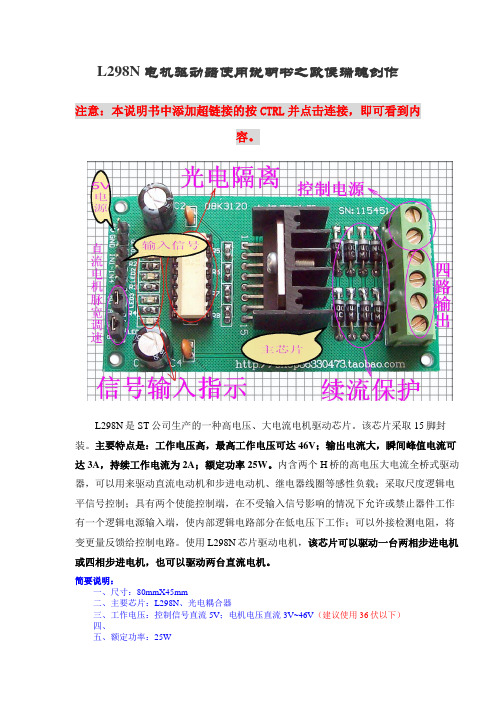
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
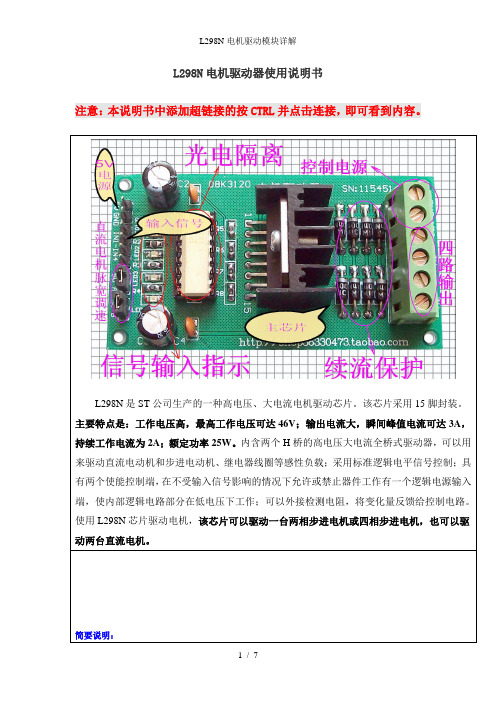
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
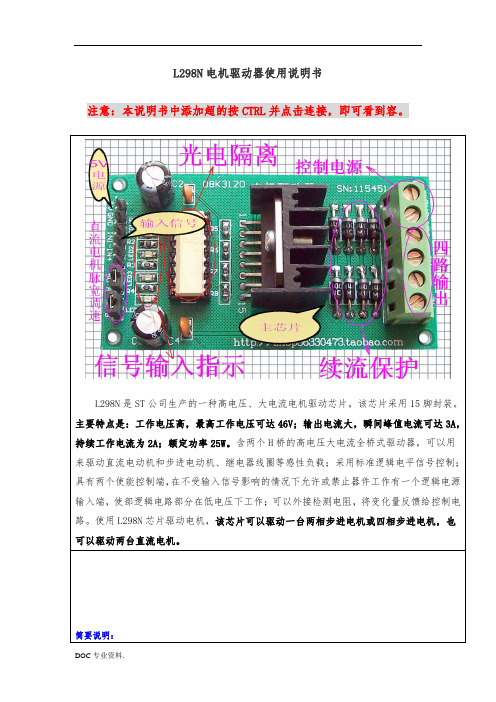
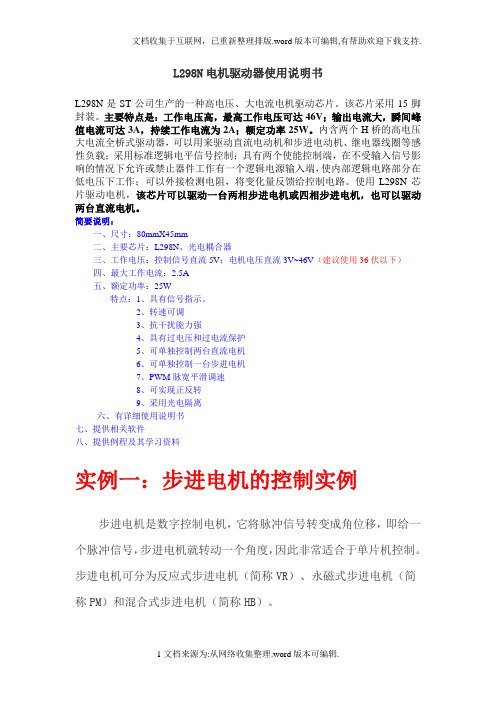
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解1.信号电源引入端2.控制信号输入端3.直流电机调速PWM脉宽信号输入端。
(控制步进电机或者控制直流电机无需调速时,保持此状态)4.控制信号指示灯5.光电隔离(抗干扰)6.核心芯片(L298N)7.二极管桥式续流保护8.电源滤波9.端子接线实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
L298N电机驱动模块详细讲解
L298N电机驱动器使用说明书注意:本说明书中添加超的按CTRL并点击连接,即可看到容。
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解1.信号电源引入端2.控制信号输入端3.直流电机调速PWM脉宽信号输入端。
(控制步进电机或者控制直流电机无需调速时,保持此状态)4.控制信号指示灯5.光电隔离(抗干扰) 6.核心芯片(L298N)7.二极管桥式续流保护8.电源滤波9.端子接线实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
L298N驱动步进电机程序(带PWM)
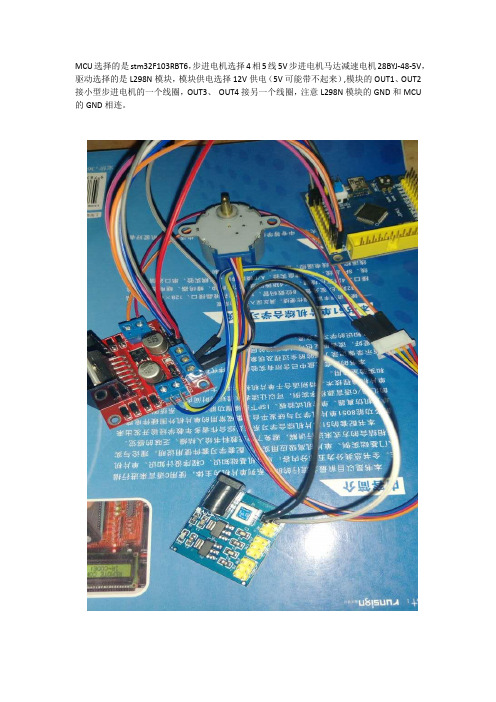
MCU选择的是stm32F103RBT6,步进电机选择4相5线5V步进电机马达减速电机28BYJ-48-5V,驱动选择的是L298N模块,模块供电选择12V供电(5V可能带不起来),模块的OUT1、OUT2接小型步进电机的一个线圈,OUT3、OUT4接另一个线圈,注意L298N模块的GND和MCU 的GND相连。
*******************************************************************************步进电机头文件Stepmotor.h#ifndef __MOTOR_H#define __MOTOR_Hvoid Motor_Init(void);void Motor_Go(void);#endif源文件Stepmotor.c#include "stepmotor.h"#include "sys.h"void Motor_Init(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能PB端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_5| GPIO_Pin_7| GPIO_Pin_8;//PB3接IN1 PB5接IN2 PB7接IN3 PB8接IN4GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//IO口速度为50MHzGPIO_Init(GPIOB, &GPIO_InitStructure);//GPIO_ResetBits(GPIOB,GPIO_Pin_3|GPIO_Pin_5| GPIO_Pin_7| GPIO_Pin_8);******************************************************************************* PWM调制头文件mypwm.h#ifndef __TIMER_H#define __TIMER_H#include "sys.h"void MYTIMER3_Init(u16 arr,u16 psc);void TIM3_PWM_Init(u16 arr,u16 psc);#endif源文件mypwm.c#include " mypwm.h#include "stm32f10x.h"void TIM3_PWM_Init(u16 arr,u16 psc){TIM_OCInitTypeDef TIM_OCInitTypestucture;TIM_TimeBaseInitTypeDef TIM_TimeBaseInitstucture;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//使能定时器时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO, ENABLE);//使能PC端口,复用时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;//PC6接ENA PC7接ENB GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//IO口速度为50MHz GPIO_Init(GPIOC, &GPIO_InitStructure);//GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);//TIM_TimeBaseInitstucture.TIM_Period=arr;//自动装载值TIM_TimeBaseInitstucture.TIM_Prescaler=psc;//预分频值TIM_TimeBaseInitstucture.TIM_CounterMode=TIM_CounterMode_Up;//计数模式向上TIM_TimeBaseInitstucture.TIM_ClockDivision=0 ;//TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitstucture);TIM_OCInitTypestucture.TIM_OCMode=TIM_OCMode_PWM1 ;//模式1TIM_OCInitTypestucture.TIM_OCPolarity=TIM_OCPolarity_High;//高电平TIM_OCInitTypestucture.TIM_Pulse=599;//改变数值调节占空比TIM_OCInitTypestucture.TIM_OutputState=TIM_OutputState_Enable;//使能TIM_OC1Init(TIM3,&TIM_OCInitTypestucture);TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能预装载TIM_OCInitTypestucture.TIM_OCMode=TIM_OCMode_PWM1 ;//模式1TIM_OCInitTypestucture.TIM_OCPolarity=TIM_OCPolarity_High;//高电平TIM_OCInitTypestucture.TIM_Pulse=599;TIM_OCInitTypestucture.TIM_OutputState=TIM_OutputState_Enable;//使能TIM_OC2Init(TIM3,&TIM_OCInitTypestucture);TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能预装载TIM_Cmd(TIM3,ENABLE);//使能定时器}*******************************************************************************主函数#include "stepmotor.h"#include "stm32f10x.h"#include "delay.h"#include "timer.h"int main(){delay_init();Motor_Init();TIM3_PWM_Init(999,71);// 72M/(71+1)(999+1)=1K hzwhile(1) //正转{GPIO_SetBits(GPIOB,GPIO_Pin_5| GPIO_Pin_7| GPIO_Pin_8);//0111GPIO_ResetBits(GPIOB,GPIO_Pin_3);delay_ms(4);GPIO_SetBits(GPIOB,GPIO_Pin_3| GPIO_Pin_7| GPIO_Pin_8);//1011GPIO_ResetBits(GPIOB,GPIO_Pin_5);delay_ms(4);GPIO_SetBits(GPIOB,GPIO_Pin_3| GPIO_Pin_5| GPIO_Pin_8);//1101GPIO_ResetBits(GPIOB,GPIO_Pin_7);delay_ms(4);GPIO_SetBits(GPIOB,GPIO_Pin_3| GPIO_Pin_5| GPIO_Pin_7);//1110GPIO_ResetBits(GPIOB,GPIO_Pin_8);delay_ms(4);}}。
L298N中文资料
L298N电机驱动器使用说明书L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源) 如图:按CTRL并点击(L298N驱动器与直流电机接线图)三、基本原理作用如下:两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
L298N电机驱动模块详解
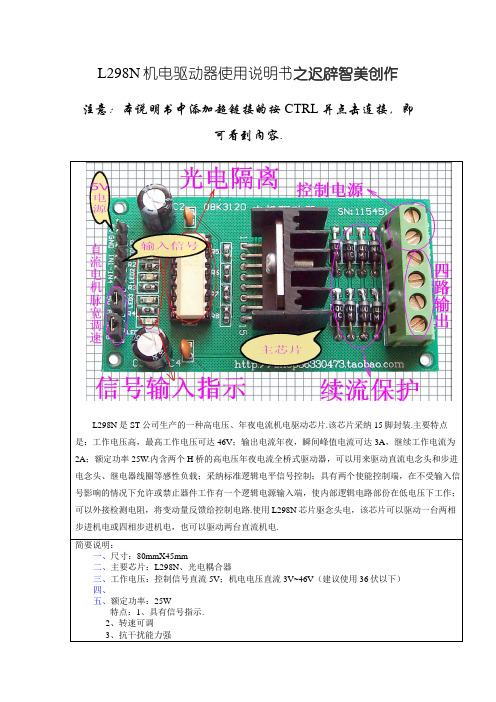
L298N机电驱动器使用说明书之迟辟智美创作注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容.L298N是ST公司生产的一种高电压、年夜电流机电驱动芯片.该芯片采纳15脚封装.主要特点是:工作电压高,最高工作电压可达46V;输出电流年夜,瞬间峰值电流可达3A,继续工作电流为2A;额定功率25W.内含两个H桥的高电压年夜电流全桥式驱动器,可以用来驱动直流电念头和步进电念头、继电器线圈等感性负载;采纳标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部份在低电压下工作;可以外接检测电阻,将变动量反馈给控制电路.使用L298N芯片驱念头电,该芯片可以驱动一台两相步进机电或四相步进机电,也可以驱动两台直流机电.简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;机电电压直流3V~46V(建议使用36伏以下)四、五、额定功率:25W特点:1、具有信号指示.2、转速可调3、抗干扰能力强4、具有过电压和过电流呵护5、可独自控制两台直流机电6、可独自控制一台步进机电7、PWM脉宽平滑调速8、可实现正反转9、采纳光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解3.直流机电调速PWM脉宽信号输入端.(控制步进机电或者控制直流机电无需调速时,坚持此状态)5.光电隔离(抗干扰)6.核心芯片(L298N)实例一:步进机电的控制实例步进机电是数字控制机电,它将脉冲信号转酿成角位移,即给一个脉冲信号,步进机电就转动一个角度,因此非常适合于单片机控制.步进机电可分为反应式步进机电(简称VR)、永磁式步进机电(简称PM)和混合式步进机电(简称HB).一、步进机电最年夜特点是:1、它是通过输入脉冲信号来进行控制的.三、基来源根基理作用如下:两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配.例如:1、两相四线步进机电的四拍工作方式,其各相通电顺序为(ABA’-B’)依次循环.《例一、步进机电正转两相四拍法式》(通电控制脉冲必需严格依照这一顺序分别控制A,B相的通断.)2、两相四线步进机电的四拍工作方式,其各相通电顺序为: (A-AB-B-BA’-A’-A’B’B’-B’A)例二、步进机电正转两相八拍法式》依次循环.(出于对力矩、平稳、噪音及减少角度等方面考虑.往往采纳八拍工作方式)参考下例:《例四、步进机电反转两相八拍法式》(3)控制步进机电的速度如果给步进机电发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步.两个脉冲的间隔越短,步进机电就转得越快.调整单片机发出的脉冲频率,就可以对步进机电进行调速.(注意:如果脉冲频率的速度年夜于了机电的反应速度,那么步进机电将会呈现失步现象).参考下例:《例五、步进机电两相四拍调速法式》《例六、步进机电两相八拍调速法式》(4)四相机电的控制法式如图:按CTRL并点击(驱动器控制四相步进机电接线图)如图:按CTRL并点击(驱动器控制四相步进机电接线图)《例八、四相步进机电正转八拍法式》《例九、四相步进机电反转四拍法式》《例十、四相步进机电反转八拍法式》《例十一、四相步进机电四拍调速法式》《例十二、四相步进机电八拍调速法式》《例十二、四相步进机电八拍调速法式》《例十三、四相步进机电八拍调速法式方法二》以下为参考法式:《例十三、四相步进机电八拍调速法式方法二》以下为参考法式:《例十四、步进机电分档控制》《例十四、步进机电分档控制》《例十五、步进机电每按一下转1.8度》《例十六、步进机电每按一下转3.6度》实例二:直流机电的控制实例使用直流/步进两用驱动器可以驱动两台直流机电.分别为M1和M2.引脚A,B可用于输入PWM脉宽调制信号对机电进行调速控制.(如果无须调速可将两引脚接5V,使机电工作在最高速状态,既将短接帽短接)实现机电正反转就更容易了,输入信号端IN1接高电平输入端IN2接低电平,机电M1正转.(如果信号端IN1接低电平,IN2接高电平,机电M1反转.)控制另一台机电是同样的方式,输入信号端IN3接高电平,输入端IN4接低电平,机电M2正转.(反之则反转),PWM信号端A控制M1调速,PWM 信号端B控制M2调速.可参考下图表:。
L298N电机驱动板用户手册说明书
User ManualForL298N Motor Driver Board (ST1112)1. IntroductionDouble H driver module uses ST L298N dual full-bridge driver, an integrated monolithic circuit in a 15- lead Multiwatt and PowerSO20 packages. It is a high voltage, high current dual full-bridge driver designed to accept standard TTL logic levels and drive inductive loads such as relays, solenoids, DC and stepping motors. Two enable inputs are provided to enable or disable the device independently of the input signals. The emitters of the lower transistors of each bridge are connected together and the corresponding external terminal can be used for the con-nection of an external sensing resistor. An additional supply input is provided so that the logic works at a lower voltage.Specification:∙Driver: L298N∙Driver power supply: +5V/DC to +35V/DC∙Driver Io: 2A∙Logic power output Vss: +5/DC to 7V/DC (internal supply +5V/DC)∙Logic current: 0 - 36mA∙Controlling level: Low -0.3V/DC to 1.5V/DC, high: 2.3V/DC to Vss∙Enable signal level: Low -0.3V/DC to 1.5V/DC, high: 2.3V/DC - Vss∙Max power: 25W (Temperature 75 cesus)∙Working temperature: -25℃to +130℃2. Pin Instruction3. ExampleThis module can drive 2 channel DC motor or 2 phase stepper motor. For 2 channel DC motor, connection and code as below: Connection:IN1==========13;IN2==========12;IN3==========11;IN4==========10;********Code begin********int in1=13;int in2=12;int in3=11;int in4=10;int speedPinA=6;int speedPinB=5;void setup(){pinMode(in1,OUTPUT);pinMode(in2,OUTPUT);pinMode(in3,OUTPUT);pinMode(in4,OUTPUT);digitalWrite(in1,HIGH);digitalWrite(in2,HIGH);digitalWrite(in3,HIGH);digitalWrite(in4,HIGH);}void loop(){_mRight(in1,in2);_mRight(in3,in4);int n=analogRead(A0)/4;_mSetSpeed(speedPinA,n);_mSetSpeed(speedPinB,n);}void _mRight(int pin1,int pin2){digitalWrite(pin1,HIGH);digitalWrite(pin2,LOW);}void _mLeft(int pin1,int pin2){digitalWrite(pin1,LOW);digitalWrite(pin2,HIGH);}void _mStop(int pin1,int pin2){digitalWrite(pin1,HIGH);digitalWrite(pin2,HIGH);}void _mSetSpeed(int pinPWM,int SpeedValue{analogWrite(pinPWM,SpeedValue);}********Code End********For 2 stepper motor the connection and code as below: Connection:IN1=======8;IN2=======9;IN3=======10;IN4=======11;******Code begin******#include <Stepper.h>#define STEPS 100Stepper stepper(STEPS, 8, 9, 10, 11);int previous = 0;void setup(){stepper.setSpeed(90);}void loop(){int val = analogRead(0); stepper.step(val - previous);previous = val;}******Code End******。
L298N的说明书
L298N的说明及应用2011-03-16恒压恒流桥式2A驱动芯片L298NL298是SGS公司的产品,比较常见的是15脚Multiwatt封装的L298N,内部同样包含4通道逻辑驱动电路。
可以方便的驱动两个直流电机,或一个两相步进电机。
L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。
L298N可接受标准TTL逻辑电平信号V SS,V SS可接4.5~7 V电压。
4脚V S接电源电压,V S电压范围V IH为+2.5~46 V。
输出电流可达2.5 A,可驱动电感性负载。
1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。
L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。
5,7,10,12脚接输入控制电平,控制电机的正反转。
E nA,E nB接控制使能端,控制电机的停转。
表1是L298N功能逻辑图。
In3,In4的逻辑图与表1相同。
由表1可知E nA为低电平时,输入电平对电机控制起作用,当E nA为高电平,输入电平为一高一低,电机正或反转。
同为低电平电机停止,同为高电平电机刹停。
L298N控制器原理如下:图3是控制器原理图,由3个虚线框图组成。
下面是3个虚线框图功能:(1)虚线框图1控制电机正反转,U1A,U2A是比较器,V I来自炉体压强传感器的电压。
当V I>V RBF1时,U1A输出高电平,U2A输出高电平经反相器变为低电平,电机正转。
同理V I<V RBF1时,电机反转。
电机正反转可控制抽气机抽出气体的流量,从而改变炉体压强。
(2)虚线框图2中,U3A,U4A两个比较器组成双限比较器,当V B<V I<V A时输出低电平,当V I>V A,V I<V B时输出高电平。
V A,V B是由炉体压强转感器转换电压的上下限,即反应炉体压强控制范围。
L298N步进电机驱动器使用说明
L298N电机驱动器使用说明兴创科技xchuangkj.taobao.L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
宝贝简介:一、尺寸:65mmX41mm X28mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流4.5~5.5V;驱动电机电压5~30V四、可驱动直流(5~30V之间电压的电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)8、可实现正反转9、采用光电隔离实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源) 三、基本原理作用如下:步进电机控制:将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。
L298N电机驱动模块详解
L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解1.信号电源引入端2.控制信号输入端3.直流电机调速PWM脉宽信号输入端。
(控制步进电机或者控制直流电机无需调速时,保持此状态)4.控制信号指示灯5.光电隔离(抗干扰) 6.核心芯片(L298N)7.二极管桥式续流保护8.电源滤波9.端子接线实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
l298n电机驱动模块工作流程
l298n电机驱动模块工作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!L298N 电机驱动模块是一种常用的直流电机驱动模块,它可以控制两个直流电机的正反转和速度。
L298N驱动电机C程序
#include
#define sen_port P1
sbit SEN1=P1^0;
sbit SEN2=P1^1;
sbit EN1=P2^2;
sbit IN1=P2^3;
sbit IN2=P2^4;
sbit EN2=P2^5;
sbit IN3=P2^6;
sbit IN4=P2^7;
{
IN1=1;
IN2=0;
IN3=0;
IN4=1;
EN1=1;
EN2=1;
}
void turn_right() //right moto is runing, but left moto is brake
{
IN1=0;
IN2=0;
IN3=1;
IN4=0;
EN1=1;
EN2=1;
}
void rotate_right() //left moto is running forward, and right moto is running backward
IN4=1;
EN1=1;
EN2=1;
}
void main(void)
{
delay(10);
P0=0x55;
while(1)
{
// P0=P1;
// delay(100); forward();
// delay(100); stop();
delay(100); backward();
delay(100); stop();
{
IN1=0;
IN2=1;
IN3=0;
IN4=1;
EN1=1;
EN2=1;
}
大总结L298N详细资料驱动直流电机步进电机free
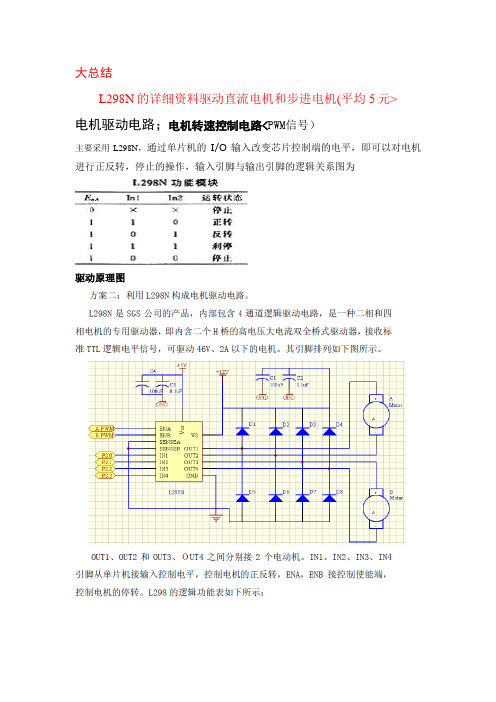
大总结L298N的详细资料驱动直流电机和步进电机(平均5元>电机驱动电路;电机转速控制电路<PWM信号)主要采用L298N,通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的操作,输入引脚与输出引脚的逻辑关系图为驱动原理图L298N电机驱动模块图•••••••••••••••••••••••••••••••••••••••••••••••••••••••••1.1 实物图•••1.2 原理图•••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••1.3 各种电机实物接线图••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••1.4 各种电机原理图•••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••1.5 模块接口说明•••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••L298N电机驱动模块图1.1 实物图正面背面1.2 原理图1.3 各种电机实物接线图直流电机实物接线图4相步进电机实物接线图3相步进电机实物接线图1.4各种电机原理图直流电机原理图步进电机原理图1.5 模块接口说明+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为 IN1和IN2、IN3和IN4的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。
我正在用L298N驱动我的小车的两个直流减速电机,其实它很好用,1和15和8引脚直接接地,4管脚VS接2.5到46的电压,它是用来驱动电机的,9引脚是用来接4.5到7V的电压的,它是用来驱动L298芯片的,记住,L298需要从外部接两个电压,一个是给电机的,另一个给L298芯片的6和11引脚是它的使能端,一个使能端控制一个电机,至于那个控制那个你自己焊接,你可以把它理解为总开关,只有当它们都是高电平的时候两个电机才有可能工作,5,7,10,12是298的信号输入端和单片机的IO口相连,2,3,13,14是输出端,输入5和7控制输出2和3, 输入的10,12控制输出的13,14L298N型驱动器的原理及应用L298N是SGS公司的产品,内部包含4通道逻辑驱动电路。
L298N电机驱动器_共地说明书
L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下: 两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
例如:1、两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A ’-B ’)通电控制脉冲必须严格按照这一顺序分别控制A,B 相的通断。
)2、两相四线步进电机的四拍工作方式,其各相通电顺序为: (A -AB -B -BA ’-A ’-A ’B ’-B ’-B ’依次循环。
(出于对力矩、平稳、噪音及减少角度等方面考虑。
往往采用八拍工作方式)(2)控制步进电机的转向如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
如:正转通电顺序是:(A-B-A’-B’依次循环。
)则反转的通电顺序是:(B‘-A’-B-A依次循环。
)参考下例:(3)控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
参考下例:(4)四相电机的控制程序以下为参考程序:实例二:直流电机的控制实例使用直流/步进两用驱动器可以驱动两台直流电机。
分别为M1和M2。
引脚A,B可用于输入PWM脉宽调制信号对电机进行调速控制。
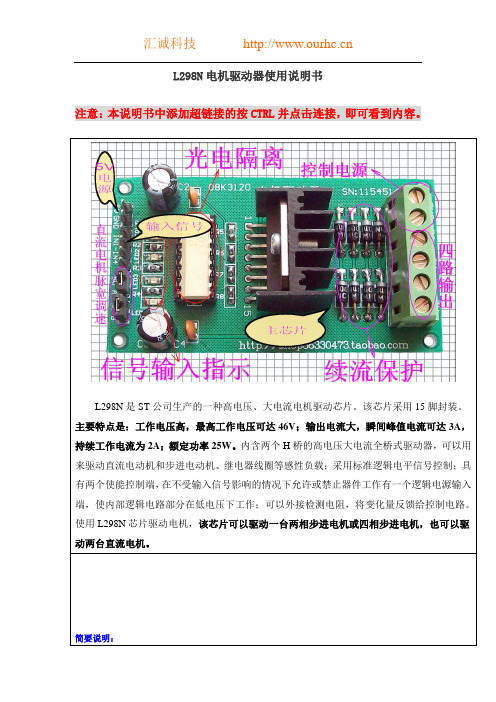
L298N(有光电隔离)电机驱动器使用说明书
L298N 电机驱动器使用说明书[温馨提示温馨提示]]在使用本产品前,请仔细阅读本使用说明书,这样您在使用中遇到问题时,也许可以通过本说明书就能解决;请妥善保管本说明书,以备日后参考;本册外观图片仅供参考,请以实物为准。
[注意事项注意事项]]本产品为直流电源供电,请确认电源正负极正确后上电; 请勿带电插拔连接线缆;此产品非密封,请勿在内部混入镙丝、金属屑等导电性异物; 储存和使用时请注意防潮防湿;第一次上电时观察绿色电源指示灯是否点亮,如果不亮,请立即断电和我们联系,或检查电源是否接反。
板上有个5V 备用输出插备用输出插针针J4J4,,只是输出给单片机等系统板使用,千万不能从这里引入外部电源千万不能从这里引入外部电源,,否则可能烧坏否则可能烧坏驱动板驱动板驱动板稳压稳压芯片78M05。
您需要的话可以自己焊接您需要的话可以自己焊接,,默认不焊接默认不焊接。
驱动器为功率设备,请保持工作环境的散热通风;在连上电机后使其连续工作一段时间后观察电机和驱动芯片的温升正常后方可进行后续使用,如果电机或驱动芯片(L298N)温度过高请和我们联系。
[主要主要功能特点功能特点功能特点]]关键芯片:L298N 双H 桥直流/步进电机驱动芯片L298N 芯片工作电压:DC 4.5~5.5V 。
电机驱动电源电压DC 6--35V 。
电源输入正常时有LED 灯指示。
最大输出电流2A (瞬间峰值电流3A ),最大输出功率25W 。
输入控制有光耦隔离,抗干扰能力强。
输出正常时电机运转有LED 灯指示。
具有二极管续流保护。
可单独控制2台直流电机或1台两相4线(或6线)步进电机。
可以采用并联接法控制一台高达3A 的直流电机。
可实现电机正反转。
直流电机转速可通过PWM 方式实现调速。
可以输出5V 电源。
[控制接口说明控制接口说明]]本驱动器控制接口采用光耦共阳极接法实现隔离功能,因此在驱动器上不需要连接控制端的地,控制时是通过控制端的地形成回路的,也避免了控制地和驱动地共地造成电机启动对控制的干扰;只要把控制端的电源正(一般有+3.3V 、+5V 、+12V 、+24V 等等)接在驱动器端口J2的VCC 上即可。
L298N电机驱动模块详解
L298N电机驱动器使用说明书之欧侯瑞魂创作注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采取15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采取尺度逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变更量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流呵护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采取光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解3.直流电机调速PWM脉宽信号输入端。
(控制步进电机或者控制直流电机无需调速时,坚持此状态)(L298N)(抗干扰)实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转酿成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机发生。