电机驱动模块的使用
电机驱动模块
板子特点:
1、双BTN7971大电流(68A)H桥驱动;
2、与单片机5V隔离,有效保护单片机;
3、板子上有5V电源指示;
4、电机驱动输出端电压指示;
5、可以焊接散热片;
6、单片机到驱动模块用4个跟线即可(GND、5V、PWM1、PWM2);
7、电池供电驱动电源;
8、隔离芯片5V电源(可以与单片机共用5V);
9、电源支持25V;
10、PWM1,PWM2最高支持15V;
11、尺寸:4*5*1.2cm;
12、模块上采用全新原装进口芯片
正式使用本店产品前请提前阅读H桥的相关知识及PWM调制原理,下面测试是假设您已经对H桥及PWM有一定的了解。
第三代电机驱动模块集成了BTN7970的反应迅速,发热量小
一、电机驱动基本使用方法
模块上的EN端为H的使能端,需要外接5V电压,EN不可悬空,当EN都为高电平时电机驱动模块开始工作,EN端为低电平时,电机驱动停止工作。
二.电机驱动基本操作
将VCC外接5v电源(此时LM244开始工作)同时ER1使能端与VCC 用短接冒连接,电机驱动启动。
通过H桥概念的理解,将PWM1与PMW2输入信号,驱动电机正反转,在这里大家要明白,单片机控制的不是
电压,而是电压输出占空比。
三、采用虚拟机测试性能
四、应用本模块前的测试说明
测试结束:红树伟业谢谢你对此产品的使用,更感谢你对本店的支持和信任,我们将以更严谨的研发态度和诚恳的工作态度来回报广大客户,祝您比赛成功。
L298N控制直流电机正反转
L298N控制直流电机正反转一、概述在现代工业自动化和机械设备中,直流电机因其控制简单、响应迅速等特点而被广泛应用。
直流电机的控制并非一件简单的事情,特别是要实现其正反转功能,就需要一种可靠的电机驱动器。
L298N是一款常用的电机驱动器模块,它基于H桥驱动电路,可以有效地控制直流电机的正反转,并且具备过载保护和使能控制功能,使得电机控制更为安全、可靠。
L298N模块内部集成了两个H桥驱动电路,可以同时驱动两个直流电机,且每个电机的驱动电流可达2A,使得它适用于驱动大多数中小型的直流电机。
L298N模块的控制逻辑简单明了,只需通过控制其输入逻辑电平,即可实现电机的正反转、停止等功能。
掌握L298N 模块的使用方法,对于熟悉和掌握直流电机的控制具有重要的意义。
在接下来的内容中,我们将详细介绍L298N模块的工作原理、控制逻辑、驱动电路连接方法以及在实际应用中的使用技巧,以帮助读者更好地理解和应用L298N模块,实现直流电机的正反转控制。
1. 简述直流电机在工业和生活中的重要性直流电机,作为一种重要的电能转换和传动设备,在工业和生活中发挥着至关重要的作用。
它们广泛应用于各种机械设备中,成为驱动各种工业设备和家用电器运行的核心动力源。
在工业领域,直流电机的重要性无可替代。
它们被广泛应用于各种生产线上的机械设备,如机床、泵、风机、压缩机、传送带等。
这些设备需要稳定、可靠的动力源来驱动,而直流电机正好满足这些需求。
它们具有高效、稳定、易于控制等优点,能够实现精确的速度和位置控制,从而提高生产效率和产品质量。
直流电机还在交通运输领域发挥着重要作用。
例如,电动汽车、电动火车、无人机等新型交通工具都采用了直流电机作为动力源。
这些交通工具需要高效、环保的动力系统来驱动,而直流电机正是满足这些需求的理想选择。
在生活中,直流电机也无处不在。
它们被广泛应用于各种家用电器中,如电扇、吸尘器、洗衣机、冰箱、空调等。
这些家电需要稳定、可靠的动力源来运行,而直流电机正是这些家电的核心动力源。
L293D电机驱动模块使用手册
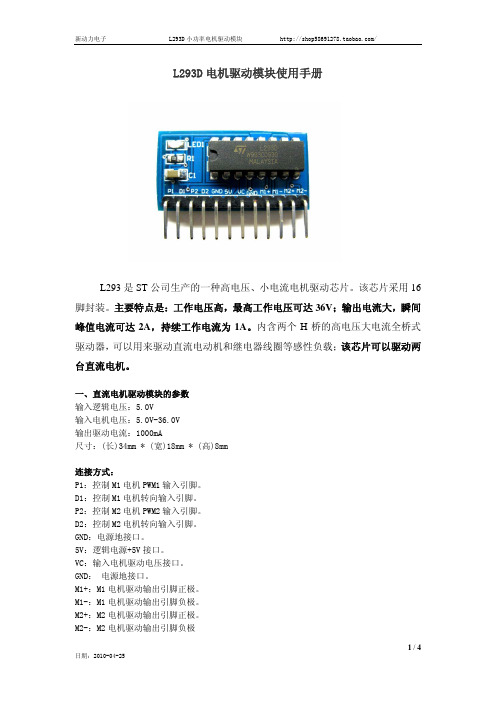
一、直流电机驱动模块的参数 输入逻辑电压:5.0V 输入电机电压:5.0V-36.0V 输出驱动电流:1000mA 尺寸:(长)34mm * (宽)18mm * (高)8mm
连接方式: P1:控制 M1 电机 PWM1 输入引脚。 D1:控制 M1 电机转向输入引脚。 P2:控制 M2 电机 PWM2 输入引脚。 D2:控制 M2 电机转向输入引脚。 GND:电源地接口。 5V:逻辑电源+5V 接口。 VC:输入电机驱动电压接口。 GND: 电源地接口。 M1+:M1 电机驱动输出引脚正极。 M1-:M1 电机驱动输出引脚负极。 M2+:M2 电机驱动输出引脚正极。 M2-:M2 电机驱动输出引脚负极
}
}
六、测试图
日期:2010-04-25
4/4
ห้องสมุดไป่ตู้
本模块具有体积小,控制方便的特点。采用此模块定会使您的电机控制自如, 应对小车题目轻松自如。
三、两台直流电机的控制方框图
日期:2010-04-25
2/4
新动力电子
L293D 小功率电机驱动模块
/
四、两台直流电机的控制实例
使用直流/步进两用驱动器可以驱动两台直流电机。分别为 M1 和 M2。引 脚 P1,P2 可用于输入 PWM 脉宽调制信号对电机进行调速控制。实现电机正反 转就更容易了,输入信号端 D1 接高电平,电机 M1 正转。(如果信号端 D1 接低 电平,电机 M1 反转。)控制另一台电机是同样的方式,输入信号端 D2 接高电 平,电机 M2 正转。(反之则反转),PWM 信号端 P1 控制 M1 调速,PWM 信号 端 P2 控制 M2 调速。 两台直流电机控制逻辑图表:
日期:2010-04-25
智能车电机驱动模块使用详解(1)
智能车电机驱动模块使用详解智能车的驱动系统一般由控制器、电机驱动模块及电机三个主要部分组成。
智能车的驱动不但要求电机驱动系统具有高转矩重量比、宽调速范围、高可靠性,而且电机的转矩‐转速特性受电源功率的影响,这就要求驱动具有尽可能宽的高效率区。
控制器采用飞思卡尔16位单片机PWM功能完成,智能车电机一般每一届都有主委会提供,而且型号指定,参数固定。
一般提供的为直流电机。
其控制简单、性能出众、供电方便。
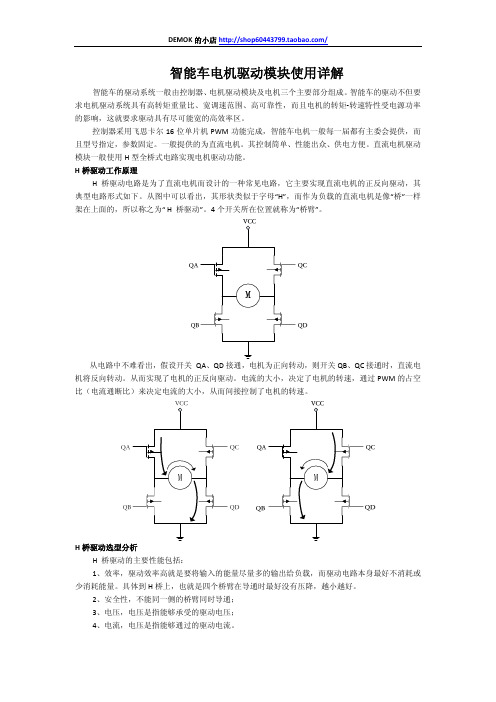
直流电机驱动模块一般使用H型全桥式电路实现电机驱动功能。
H桥驱动工作原理H 桥驱动电路是为了直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下。
从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“ H 桥驱动”。
4个开关所在位置就称为“桥臂”。
从电路中不难看出,假设开关 QA、QD接通,电机为正向转动,则开关QB、QC接通时,直流电机将反向转动。
从而实现了电机的正反向驱动。
电流的大小,决定了电机的转速,通过PWM的占空比(电流通断比)来决定电流的大小,从而间接控制了电机的转速。
H桥驱动选型分析H 桥驱动的主要性能包括:1、效率,驱动效率高就是要将输入的能量尽量多的输出给负载,而驱动电路本身最好不消耗或少消耗能量。
具体到H桥上,也就是四个桥臂在导通时最好没有压降,越小越好。
2、安全性,不能同一侧的桥臂同时导通;3、电压,电压是指能够承受的驱动电压;4、电流,电压是指能够通过的驱动电流。
根据H桥驱动的主要特性分析,安全性主要由控制部分决定。
在智能车设计中,电机是固定型号的(一般组委会会提供车模和电机),所以所需的电流和电压时有限的,所以H桥驱动的选型会重点关注H桥驱动的效率,即关注MOS管的压降上。
因此我们选择H桥驱动遵循以下原则:(1)由于驱动电路是功率输出,要求开关管输出功率较大;(2)开关管的开通和关断时间应尽可能小;(3)小车使用的电源电压不高,因此开关管的饱和压降应该尽量低。
A电机驱动模块使用手册
一、模块特性
◆ 2 路电机驱动输出,单板典型最大电流 2A; ◆ 驱动板工作电压范围:7.6V~30V; ◆ 推荐驱动频率范围:500Hz~30KHz; ◆ 板子尺寸:23mm*18.3mm; ◆ 排针间距 20mm;
二、模块使用说明
模块接口说明: 1.VM:驱动模块的电源,根据电机的参数输入,实测范围 7.6~40V(模块上面有 2 个 VM,可以只接一个,建议都接) 2.VCC:接 5V 输入,不要输入 3.3V,要不然会影响性能。(模块上面有 2 个 VCC,可以只接一个,建议都接) 3.GND 是接地引脚。(模块上面有 2 个 GND,可以只接一个,建议都接)
◆ 产品放置时,因为焊接元器件个别高度凸出,因此不要有其它重物压在上面,以 防压坏电路板上的贴片元件,进 而影响板子性能; ◆ 电路板存放温度不要超过 55°,湿度小于 60%; ◆ 板子放置不要靠近潮湿地方,以防板子受潮影响使用,如果板子受潮,请将板子 至于通风干燥地方进行干燥处理, 如空调下,利用空调热风进行干燥; ◆ 由于板子的引脚是裸露设计,请不要用手触摸相关引脚,以防静电损坏芯片引脚, 影响板子性能。 ◆ 电路板使用前,必须检查所接电源是否在说明书规定的范围内,以防电压太高击 穿关键芯片,影响板子性能; ◆ 电路板使用时,注意不要将电源接反。
很多同学看了上述的教程还不太理解,实际上说白了就是 AIN1 AIN2 的信号的压差控制 AOUT1 AOUT2 的输出,如果 两个输入引脚一个是高电平(占空比 100%)一个是低电平(占空比 0%),那输出就是最大速度。两个引脚控制的 PWM 频率应该是一样的,比如都是 10khz。
三、模块使用注意事项
ห้องสมุดไป่ตู้
proteus中四相步进电机连接方法
proteus中四相步进电机连接方法
在Proteus中,可以使用L298N电机驱动模块来连接四相步进电机。
以下是连接步骤:
1.将L298N电机驱动模块拖放到Proteus的工作区中。
2.连接电源和地线:
o将Vcc引脚连接到5V电源。
o将GND引脚连接到地线。
3.连接步进电机:
o将步进电机的四个线连接到L298N的OUT1、OUT2、OUT3、OUT4引脚上,具体连接顺序根据你所使用步
进电机的引脚排列而定。
4.连接控制信号:
o将步进电机的ENABLE引脚连接到L298N的ENA引脚上。
o将步进电机的控制信号(例如DIR和PUL)连接到L298N的相应引脚上。
DIR引脚用于控制步进电机的
旋转方向,PUL引脚用于控制步进电机的步进脉冲。
5.连接电源:
o将电源引脚(如B+和B-)连接到合适的电源供应器上,以提供足够的电流来驱动步进电机。
6.完成连接后,你可以通过在Proteus中模拟信号输入来测
试步进电机的运行情况。
需要注意的是,具体的连接方法可能因使用的步进电机和驱动模块而有所不同。
在进行实际连接时,请参考步进电机和L298N电机驱动模块的规格和数据手册,以确保正确连接并避免任何意外情况。
l298n引脚图
l298n引脚图引言本文档将介绍L298N电机驱动模块的引脚图及其功能,帮助读者理解和正确使用该模块。
L298N简介L298N是一款双H桥电机驱动模块,常用于控制直流电机、步进电机和步进电机等。
L298N模块具有高电压操作能力和大功率输出,适用于各种机器人、车辆控制以及其他自动化应用。
引脚图以下是L298N模块的引脚图:l298n引脚图l298n引脚图引脚说明:1.IN1和IN2:输入引脚,控制左边电机的方向和速度。
通过控制这两个引脚的电平来实现正转、反转和制动等功能。
2.IN3和IN4:输入引脚,控制右边电机的方向和速度。
通过控制这两个引脚的电平来实现正转、反转和制动等功能。
3.ENA和ENB:使能引脚,控制左右两边电机的速度。
通过控制这两个引脚的PWM信号来调节电机的速度。
ENA对应左边电机,ENB对应右边电机。
4.OUT1和OUT2:输出引脚,用于连接左边电机。
5.OUT3和OUT4:输出引脚,用于连接右边电机。
6.VCC和GND:电源引脚,用于连接外部电源。
VCC接5V至35V的电源,GND接地。
使用示例下面是一个简单的示例,展示如何使用L298N模块控制直流电机:1. 将直流电机的正极连接到OUT1或OUT2引脚,负极连接到GND引脚。
2. 将ENA引脚与Arduino的PWM引脚相连。
3. 将IN1引脚与Arduino的数字引脚相连,用于控制电机的正转、反转和制动。
4. 将VCC引脚与外部电源正极相连,GND引脚与外部电源负极相连。
5. 编写Arduino代码,通过控制ENA和IN1引脚的电平,来控制电机的速度和方向。
注意事项在使用L298N模块时,请注意以下事项:1.接线时确保极性正确,错误的接线可能导致模块损坏或电机反转方向错误。
2.电源电压必须在规定范围内,超过35V可能损坏L298N模块。
3.当驱动大功率负载时,可能需要加散热器来降低模块温度。
4.在使用PWM调节电机速度时,需要根据具体情况设置正确的占空比。
直流电机驱动模块 说明书

直流电机驱动模块使用说明书尊敬的客户:您好!感谢您选用本店的电机驱动模块,为了更快更好的使用本产品,请您仔细的阅读本使用说明书。
特点:加入多级驱动,超高输入阻抗,对输入信号没有驱动要求,适合各类I/O口,可驱动本店所有电机。
一.电机驱动模块简介中小电流直流电机专用驱动器,所用芯片l298属于H桥集成电路,其输出电流为2000mA,最高电流4A,最高工作电压36V,可以驱动感性负载,比如:中型直流电机,继电器、步进电机和开关电源晶体管,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。
当驱动小型直流电机时,可以直接控制两路电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。
本模块具有体积小,控制方便的特点。
采用此模块定会使您的电机控制自如,应对小车题目轻松自如。
二.驱动模块指示图1、10PIN插针组合:该接口主要是配合我们将要推出的单片机控制板接口的。
一般可以用杜邦线连接。
D1就是对应M1的方向控制,P1对应M1的速度控制;D2就是对应M2的方向控制,P2对应M2的速度控制(具体见备注);VCC是电机的电源(当工作电流较小时选用,标准插针,可配合杜邦线使用,此种接口可长时间安全通过2A以下电流),GND是共同的地;+5V是系统供电。
2、电源指示灯:上电后灯亮表示供电正常。
3、第2路电机方向指示灯:亮是高电平,灭是低电平。
4、第2路电机信号指示灯:亮度反应速度的快慢。
5、电流检测接口:第2路电机电流检测接口,把短路帽取下,可以测试通过第2路电机的电流。
6、第2路电机插针输出:简易的第二路电机的输出(适合小电流输出,标准插针,可配合杜邦线);7、第2路电机大功率输出端子:大功率的第二路电机的输出;8、第1路电机大功率输出端子:大功率的第二路电机的输出;9、第1路电机插针输出:简易的第一路电机的输出(适合小电流输出,标准插针,可配合杜邦线);10、第1路电流检测接口:第1路电机电流检测接口,把短路帽取下,可以测试通过第1路电机的电流;11、第1路电机信号指示灯:亮度反应速度的快慢。
2路电机驱动模块的使用方法
2路电机驱动模块的使用方法
2路电机驱动模块的使用方法主要包括以下步骤:
1. 硬件连接:将双路直流电机驱动模块的VCC和GND引脚连接到外部电
源的正负极上,电压范围为5V-12V。
将直流电机的正极连接到M+和M-
引脚上,负极连接到M-和M+引脚上。
将控制板的IO口与模块的IN1、
IN2、IN3、IN4引脚相连,其中IN1和IN2控制第一个电机,IN3和IN4
控制第二个电机。
2. 参数设置:通过控制器或者其他设备,设置双路电机驱动模块的控制参数,如速度、位置、转矩等。
根据实际需求,调整参数以实现所需的运动控制效果。
3. 启动电机:通过控制器或者其他设备,启动双路电机驱动模块,开始控制两个电机的运动。
实时监测电机的状态,根据需要进行调整和优化。
双路电机驱动模块在各个领域都有广泛的应用。
在工业自动化中,可以用于控制机械臂、输送带等设备的运动;在机器人领域,可以用于控制机器人的各个关节的运动;在医疗设备中,可以用于控制手术机器人、医疗影像设备等的运动。
双路电机驱动模块的使用可以提高设备的精确性、稳定性和效率。
以上内容仅供参考,建议咨询专业人士获取更准确的信息。
YL-19 LN298使用说明
LN298电机驱动模块使用说明雁凌电子在使用本产品前,请仔细阅读本使用说明书,这样您在使用中遇到问题时,也许可以通过本说明书就能解决;请妥善保管本说明书,以备日后参考;本册外观图片仅供参考,请以实物为准。
一模块使用前注意事项模块使用前注意事项1、本产品为直流电源供电,请确认电源正负极正确后上电;2、请勿带电插拔连接线缆;3、此产品非密封,请勿在内部混入镙丝、金属屑等导电性异物;4、储存和使用时请注意防潮防湿;5、第一次上电时观察绿色电源指示灯(L5)是否点亮,如果不亮,请立即断电检查电源是否接反。
板上有个5V插针P3,它要配合跳线器P2一起使用,使用时分两种情况:(在第3页有详细介绍)A、如果需要通过电机驱动板插针P3给单片机等系统板供5V电时,将P2跳冒短接即可;B、如果单片机等系统板有自己的5V电源时,此时需要将单片机5V电源接入P3同时一定要把P2跳冒去掉,否则可能会烧坏驱动板板载稳压芯片78M05。
6、驱动器为功率设备,请保持工作环境的散热通风;在连上电机后使其连续工作一段时间后观察电机和驱动芯片的温升正常后方可进行后续使用主要功能特点模块主要功能特点二模块关键芯片:L298N双H桥直流/步进电机驱动芯片L298N芯片工作电压:DC 4.5~5.5V。
电机驱动电源电压DC5--35V。
电源输入正常时有LED灯指示。
最大输出电流2A(瞬间峰值电流3A),最大输出功率25W。
输出正常时电机运转有LED灯指示。
具有二极管续流保护。
可单独控制2台直流电机或1台两相4线(或6线)步进电机。
可以采用并联接法控制一台高达3A的直流电机。
可实现电机正反转。
直流电机转速可通过PWM方式实现调速。
模块尺寸:4.4cm*5.0cm硬件接口说明模块硬件接口说明三模块P3:电机驱动电源输入接口范围DC5V—35V。
V+接正,GND接地,注意不要接反电源极性。
P1:驱动器和控制端的接口控制直流电机时IN1、IN2和ENA为一组,它们控制的电机A接在A+和A-,如果电机A不调速,则ENA悬空即可;如果电机A调速,则ENA接一路PWM输出口;IN3、IN4和ENB为一组,它们控制的电机B接在B+和B-,如果电机B不调速,则ENB悬空即可;如果电机B调速,则ENB接另一路PWM输出口;控制步进电机时IN1、IN2、IN3和IN4接4根IO线,A-、A+接步进电机一相;B-、B+接步进电机另一相。
L298N步进电机驱动器使用说明

L298N步进电机驱动器使用说明L298N步进电机驱动器是一款广泛应用于步进电机控制的驱动器模块。
它采用双向电机驱动桥芯片L298N,可以提供高电流和高电压的驱动能力,适用于同步马达和双向直流电动机的控制。
以下是L298N步进电机驱动器的使用说明。
一、硬件连接1. 将L298N模块与Arduino主控板连接。
将L298N模块的5V和GND引脚分别连接到Arduino的5V和GND引脚。
2.将步进电机的4根线分别连接到L298N模块的输出端子A、A-、B和B-。
相应的线连接方式为:步进电机的A相线连接到L298N模块的A端子,A-相线连接到A-端子,B相线连接到B端子,B-相线连接到B-端子。
二、编码下面是一个简单的Arduino代码示例,用于控制步进电机的运动。
代码将使步进电机按指定的方向和速度旋转。
```cpp#include <Stepper.h>//设定步进电机的步数和引脚const int stepsPerRevolution = 200;Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);void setu//设置步进电机的速度myStepper.setSpeed(60);void loo//顺时针旋转一圈myStepper.step(stepsPerRevolution);delay(1000);//逆时针旋转一圈myStepper.step(-stepsPerRevolution);delay(1000);```三、常见问题解答1.如何改变步进电机的转向?需要根据具体的控制电路和驱动器设计,通过修改引脚的输出顺序或改变控制信号的频率来改变步进电机的转向。
2.怎样确定步进电机的旋转速度?可以使用`myStepper.setSpeed(speed)`函数设置步进电机的转速,其中speed的单位是步/分钟。
具体的速度可以通过试验和调节来确定。
Makeblock编码电机驱动模块使用手册

简介Makeblock的编码电机驱动模块是一个自带控制器来进行PID运算的直流电机驱动模块。
该模块使用ATmega328P作为控制的主芯片,兼容Arduino模式,因此高级玩家也可以把这块驱动板当作一个主控单元来使用。
我们的固件代码存放在,由于老的固件协议过于复杂,所以我们后续只会对新的固件进行更新及维护,如果您希望获得我们的最新服务支持,希望您参考第5章节的内容对您的固件进行更新。
使用Makeblock的编码电机驱动模块,您可以通过发送I2C指令来控制双路电机(带编码器)的正反转速度,也可以直接设定电机的运动距离或者转动角度。
在最新的固件驱动中,两路电机的PID参数,码盘分辨率,减速比还有模块的I2C地址都可以通过I2C总线来进行设置,设置的参数会自动保存在EEPROM中,即使重新上电,也不会丢失您的配置。
因此该驱动模块可以兼容市面上绝大多数种类的直流编码电机。
1.硬件结构及连线方式无论您是使用makeblock的Baseboard,Orion还是UNO shield主板,直流电机都需要接在红色的端口,以获得大电流的支持。
每个编码电机驱动板可以接入两路直流编码电机,在控制的时候要注意插槽的标示。
另外需要注意上图标示1中的电源供电(6V<电源<12V),以及标示2中的拨码开关的开关状态(使用时拨动到ON状态)。
2.如何使用老固件友情提示: 因为老的固件已经停止维护,所以除非您无需使用我们最新的驱动支持,否则还是建议您按照章节5的内容升级您的固件。
如果你的电机驱动模块是在2015年10月30之前收到的货,那这个模块所使用的固件就肯定是老固件,老固件的文档及资料路径如下:1. 源代码2.API说明3.PID及电机参数设置工具4.如何使用设置工具模块默认的I2C地址是0x09,如果想控制3个以上的编码电机,就要使用到两个编码电机驱动模块,这时候就需要使用设置工具重新设置模块的I2C地址。
否则两个模块的I2C 地址一致,是无法独立进行控制的。
电机驱动模块实验报告

一、实验目的1. 了解电机驱动模块的基本原理和功能。
2. 掌握使用电机驱动模块控制电机的步骤和方法。
3. 学会使用实验设备进行电机驱动实验,并对实验结果进行分析。
二、实验原理电机驱动模块是一种将控制信号转换为电机驱动信号的电子电路,用于控制电机的启动、停止、转向和转速等。
常见的电机驱动模块有L298N、TB6612、DRV8825等。
本实验采用TB6612电机驱动模块,该模块由东芝半导体公司生产,适用于直流电机驱动,具有高集成化和优良性能。
TB6612模块内部包含两个H桥驱动器,可驱动两个直流电机,具有方向控制和PWM调速功能。
三、实验设备1. PC机2. STM32F103C8T6单片机开发板3. TB6612电机驱动模块4. 直流电机5. 电压表6. 万用表7. 连接线四、实验步骤1. 连接电路将STM32F103C8T6单片机开发板的GPIO引脚与TB6612电机驱动模块的IN1、IN2、IN3、IN4引脚相连,将直流电机的正负极分别连接到TB6612模块的M1、M2引脚。
2. 编写程序使用Keil uVision5软件编写STM32F103C8T6单片机程序,实现电机驱动功能。
程序主要包括以下部分:(1)初始化GPIO引脚为输出模式;(2)编写控制电机方向和转速的函数;(3)在主循环中调用函数控制电机运行。
3. 上传程序将编写的程序上传到STM32F103C8T6单片机开发板。
4. 实验测试(1)通过改变GPIO引脚的高低电平,控制电机转向;(2)通过改变PWM占空比,控制电机转速;(3)观察电压表和万用表,测量电机运行时的电压和电流。
五、实验结果与分析1. 实验结果(1)改变GPIO引脚的高低电平,可以控制电机正转、反转和停止;(2)改变PWM占空比,可以控制电机转速快慢;(3)电压表和万用表测量结果显示,电机运行时电压和电流符合预期。
2. 实验分析本实验验证了TB6612电机驱动模块的基本功能和性能。
l298n直流电机 用法
l298n直流电机用法l298n直流电机是一种常用的电机驱动模块,它能够通过控制直流电机的转速和方向来实现各种精确的运动控制。
在本文中,我将为您介绍l298n直流电机的基本用法,并探讨其在各种应用中的广泛应用。
让我们来了解一下l298n直流电机模块的基本结构和原理。
l298n直流电机模块通常由一个l298n芯片和外部部件组成,如电源、电机和控制信号。
l298n芯片是一种双H桥驱动芯片,它可以独立地控制两个直流电机,并通过控制输入信号来实现正转、反转和停止等运动。
l298n芯片还具有保护电路,可以保护电机和电源免受电流和过热等问题的影响。
对于l298n直流电机模块的用法,首先要正确连接电源和电机。
正常情况下,l298n芯片的电源应与电机的电源相匹配,以确保电源稳定和电流充足。
接下来,我们需要将直流电机与l298n芯片的输出引脚相连,其中IN1和IN2控制第一个电机,IN3和IN4控制第二个电机。
并且,我们还需将控制信号引脚连接到微控制器或其他控制设备上,以便可以发送相应的控制信号。
一旦连接正确,我们就可以开始使用l298n直流电机模块进行各种运动控制了。
我们可以使用PWM技术来控制电机的转速。
通过调整PWM占空比,我们可以改变电机的平均电压,并从而调整其转速。
通过控制IN1和IN2的电平可实现电机的正转、反转和停止等操作。
通过控制IN1和IN2的电平,我们可以实现电机的正转、反转和停止等操作。
通过编程调整控制信号,我们还可以实现更复杂的运动控制,如加减速和位置控制等。
l298n直流电机模块是一种功能强大的电机驱动模块,可用于各种应用中的精确运动控制。
无论是机器人控制、智能小车还是电动机械臂,l298n直流电机模块都能够为我们提供便利和灵活性。
通过合理的连接和编程,我们可以实现各种想象力的运动控制,为我们的项目增添无限可能。
l298n直流电机模块是一种强大且易于使用的电机驱动模块,它为我们提供了灵活的运动控制和精确的转速调节。
Neurons智能PID电机驱动模块使用手册
1. 简介Neurons智能PID电机驱动模块是一个由自带的控制器来进行PID运算、梯形图控制,由板上的L298N来进行直流电机驱动的智能模块。
使用本模块,您可以只通过串口发送8个字节的命令(或者I2C接口5个字节)就可以控制双路电机(带编码器)的正反转速度,甚至可以直接设定电机的运动距离。
两路电机的PID参数和梯形图参数都可以分别进行设定。
2. 硬件结构1. 主要芯片本模块的主要IC是板上的dsPIC33F MCU和L298N驱动芯片。
其中MCU负责外部指令的处理和PID、梯形图的运算并控制L298N,L298N负责电机的驱动。
板上还带有MAX3232 串口电平转换电路,您可以直接和台式机的RS232接口相连。
2. 接口COMS 电平UART接口:输出电压为3.3V,输入电压3.3V或者5V。
可以选择由此接口给模块供+5V直流电。
RS232 UART接口:为以上接口经过RS3232转换过的输出。
符合RS232标准。
请勿将此接口与其他的MCU直接相连。
I2C接口:输入输出电平为5V。
可以选择由此接口给模块供+5V直流电。
编码器接口(X2):用于和直流电机的编码器相连。
一定要注意编码器的型号和板上电阻的配合。
编码器应当是AB双向编码器。
强烈推荐使用店主提供的电机。
电机驱动接口(X2):和电机的正负极相接。
电机电源: 正负极按照PCB丝印相连,不能超过+25V。
推+12。
3. 如何使用模块在送到您手中之前已经进行过测试。
如果是和电机一起购买,PID参数和梯形图参数都会有可以用的预设值,因您可以选择不进行任何的初始化直接对模块进行操作。
您可以通过模块下侧的3个接口中的任何一个对模块发送命令。
1. 串口命令格式波特率的确定:在模块上电或者复位之后,主机需要向模块发送0x55, 模块成功接收之后即将波特率调整为和主机相同。
波特率范围为9600~115200.所有的串口命令都是由8 byte组成的。
其中第1、2byte为固定值0x19和0x88, 第3 byte代表命令的种类。
电机驱动模块
四相八拍模式波形图
P1.0 +5v P1.1 P1.2
19.HALF/FULL,半步、全步方式 选择端。 高电平时——四相八拍,低电平时——全步 方式。如果选择全步方式时变换器在奇数状 态,会得到单相工作方式。
20.RESET,复位输入端。此引脚输入负脉 冲时,变换器恢复初始状态(ABCD=0101) 。
L297驱动相序的产生: L297能产生单四拍、双四拍和四相八拍所需的适当相
4. A, A相驱动信号。
5.INH1,控制A相和B相的驱动 级,当此引脚为低电平时,A,B 相的驱动控制被禁止.
10.ENABLE,使能输入端。当它为低 电平时INH1,INH2,A,B,C,D都为低 电平。当系统被复位时用来阻止电 机驱动。
11.CONTROL,斩波器功能控制端 。低电平时INH1和INH2起作用。高 电平时对A,B,C,D起抑制作用。
步进电机PWM驱动原理
使用脉冲宽度调制(PWM)方式来驱动步 进电机,也就是给步进电机输入占空比可调 的矩形波,当电平为1时电机转动,电平为0 时电机停止。
单片机 驱动模块 步进电机
PWM波
?
车轮转动
●电机驱动模块 主要功能:驱动小车轮子转动 ,
使小车行进。
答:由于步进电机的工作电流比较大,不能直接使用 单片机来驱动,一般使用集成芯片L297或L298。
L297是意大利SGS半导体公司生产的步进
电机专用控制器,它能产生4相控制信号,可用于
单片机控制的两相双极和四相单相步进电机,能
TB6612FNG驱动模块使用说明

TB6612FNG模块使用说明慧净电子简单说明•电机电源接口带有反接保护电路.相对于传统的L298N效率上提高很多,体积上也大副减少,当然也就显得更加娇贵,所以我们建议有一定动手能力的朋友使用,接线的时候务必细心细心再细心,本模块全部测试OK才会售出,所以不接受任何形式的退换货,此点不能接受的朋友请慎拍.希望大家理解.TB6612的的用法TB6612的的用法:TB6612是双驱动,也就是可以驱动两个电机下面分别是控制两个电机的IO口STBY口接单片机的IO口清零电机全部停止,置1通过AIN1 AIN2,BIN1,BIN2 来控制正反转VM 接12V以内电源VCC 接5V电源GND 就不多说了啊驱动1路PWMA 接单片机的PWM口模块原理图控制逻辑表1 TB6612FNG简介• TB6612FNG是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流MOSFET-H桥结构,双通道电路输出,可同时驱动2个电机。
• TB6612FNG每通道输出最高1 A的连续驱动电流,启动峰值电流达2A/3A(连续脉冲/单脉冲);4种电机控制模式:正转/反转/制动/停止;PWM支持频率高达100 kHz;待机状态;片内低压检测电路与热停机保护电路;工作温度:-20~85℃;SSOP24小型贴片封装。
.如上图所示,TB6612FNG的主要引脚功能:AINl/AIN2、BIN1/BIN2、PWMA/PWMB为控制信号输入端;AO1/A02、B01/B02为2路电机控制输出端;STBY为正常工作/待机状态控制引脚;VM(3~13.5 V)和VCC(2.7~5.5 V)分别为电机驱动电压输入和逻辑电平输入端。
TB6612FNG是基于MOSFET的H桥集成电路,效率远高于晶体管H桥驱动器。
相比L293D每通道平均600 mA的驱动电流和1.2 A的脉冲峰值电流,它的输出负载能力提高了一倍。
相比L298N的热耗性和外围二极管续流电路,它无需外加散热片,外围电路简单,只需外接电源滤波电容就可以直接驱动电机,利于减小系统尺寸。
Makeblock编码电机驱动模块使用手册
简介Makeblock的编码电机驱动模块是一个自带控制器来进行PID运算的直流电机驱动模块。
该模块使用ATmega328P作为控制的主芯片,兼容Arduino模式,因此高级玩家也可以把这块驱动板当作一个主控单元来使用。
我们的固件代码存放在,由于老的固件协议过于复杂,所以我们后续只会对新的固件进行更新及维护,如果您希望获得我们的最新服务支持,希望您参考第5章节的内容对您的固件进行更新。
使用Makeblock的编码电机驱动模块,您可以通过发送I2C指令来控制双路电机(带编码器)的正反转速度,也可以直接设定电机的运动距离或者转动角度。
在最新的固件驱动中,两路电机的PID参数,码盘分辨率,减速比还有模块的I2C地址都可以通过I2C总线来进行设置,设置的参数会自动保存在EEPROM中,即使重新上电,也不会丢失您的配置。
因此该驱动模块可以兼容市面上绝大多数种类的直流编码电机。
1.硬件结构及连线方式无论您是使用makeblock的Baseboard,Orion还是UNO shield主板,直流电机都需要接在红色的端口,以获得大电流的支持。
每个编码电机驱动板可以接入两路直流编码电机,在控制的时候要注意插槽的标示。
另外需要注意上图标示1中的电源供电(6V<电源<12V),以及标示2中的拨码开关的开关状态(使用时拨动到ON状态)。
2.如何使用老固件友情提示: 因为老的固件已经停止维护,所以除非您无需使用我们最新的驱动支持,否则还是建议您按照章节5的内容升级您的固件。
如果你的电机驱动模块是在2015年10月30之前收到的货,那这个模块所使用的固件就肯定是老固件,老固件的文档及资料路径如下:1. 源代码2.API说明3.PID及电机参数设置工具4.如何使用设置工具模块默认的I2C地址是0x09,如果想控制3个以上的编码电机,就要使用到两个编码电机驱动模块,这时候就需要使用设置工具重新设置模块的I2C地址。
否则两个模块的I2C 地址一致,是无法独立进行控制的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
共享知识分享快乐
电机驱动模块的使用
2015212822 号学
张家梁学生姓名
应用物理学(通信基础科学)专业名称
理学院所在系(院)
指导教师韩康榕
日月年2017 4 4
卑微如蝼蚁、坚强似大象.
共享知识分享快乐
电机驱动模块的使用
张家梁
() 100876北京邮电大学,北京摘要:实验中使用电机驱动模块,采用一片双通道H桥电流控制电机驱动器DRV8833,可以同时驱动两个直流电机或一个步进电机,可通过代码改变DRV8833控制信号的占空比来改变电机的转速或LED的亮度,可以通过电流表、电压表、示波器等来完成对具体观测点的测量,对数据分析后验证功能是否正常。
信号驱动;示波器;PWM关键词:直流电机;步进电机;TI Cortex M4
The Use of Motor Drive Module
JiaLiang Zhang
(Department of Applied Physics, Beijing, BJ 10, China)
Abstract:The motor drive module is used in the experiment,. The dual-channel H-bridge current control motor
driver DRV8833 can drive two DC motors or one stepper motor at the same time. The duty cycle of the DRV8833
control signal can be changed by code to change the motor speed or LED Of the brightness, you can through the
ammeter, voltmeter, oscilloscope, etc. to complete the measurement of the specific point of view, after the data
analysis function is normal.
Keywords: DC motor; stepper motor; TI Cortex M4; PWM signal driver; oscilloscope.
1引言
电机驱动模块包括直流电机和步进电机,同时由PWM信号驱动,从而改变电机转速。
直流电机的驱动程序需要液晶、滚轮、Tiva的PWM输出、定时器等多个模块共同配合完成。
液晶用于显示电机转数、滚轮用来调节PWM 的占空比从而控制电机的转速、PWM 输出用于驱动直流电机旋转、而定时器则是用来检测电机的旋转数度。
2 实验原理
1.电机驱动模块布局
卑微如蝼蚁、坚强似大象.
共享知识分享快乐
2.直流电机的控制与测速
电路等效原理结构图:
软件流程图:
步进电机的控制3.
电路等效原理结构图:
卑微如蝼蚁、坚强似大象.共享知识分享快乐
软件流程图:
的驱动与电流检测LED4.高亮电路等效原理结构图:
软件流程图:与直流电机控制与测速使用同样的程序
卑微如蝼蚁、坚强似大象.
共享知识分享快乐
3实验步骤
1.直流电机的控制与测速
2.步进电机的控制
卑微如蝼蚁、坚强似大象.共享知识分享快乐
3.高亮LED的驱动与电流检测
实验数据及处理4
直流电机的控制与测速 1.测量点波形:AOUT1
卑微如蝼蚁、坚强似大象.
共享知识分享快乐
AOUT2测量点波形:
AIO测量点波形:
卑微如蝼蚁、坚强似大象.分享快乐共享知识
步进电机的控制2.
① LCD显示周期 =46s
AOUT1
AOUT2
AIO
卑微如蝼蚁、坚强似大象.分享快乐共享知识
=22s
② LCD显示周期
AOUT1
AOUT2
AIO
卑微如蝼蚁、坚强似大象.分享快乐共享知识
=14s
③ LCD显示周期
AOUT1
AOUT2
AIO
卑微如蝼蚁、坚强似大象.分享快乐共享知识
=5s
④ LCD显示周期
AOUT1
AOUT2
AIO
卑微如蝼蚁、坚强似大象.分享快乐共享知识
的控制与电流检测高亮LED3. AOUT1测量点波形LED灯亮度及电流表示数
电流数
0.51mA
8.91mA
26.81mA
43.0mA
卑微如蝼蚁、坚强似大象.
135.6mA
313.9mA
超量程
卑微如蝼蚁、坚强似大象.
共享知识分享快乐
由上述实验所得数据以及图像可知,随着滚轮转动,PWM波的频率越大,直流电机和步进电机的转速越快,驱动LED灯的信号的占空比越大,LED灯越亮。
5 思考题
1.1.CoretxM4调节直流电机转速的方法?
直流电机的驱动程序需要液晶、滚轮、PWM输出、定时器等多个模块的共同配合完成。
其中液晶用于显示电机转数、滚轮用来调节PWM的占空比从而控制电机的转速、PWM 输出用于驱动直流电机旋转。
故可通过调节LCD模块滚轮或改变代码中PWM波的占空比的初始值来调节直流电机的转速,这两种方式使在电机转速取到转速范围内的任意值。
2.CoretxM4调节步进电机转速的方法?
步进电机调节转速的方式同直流电机调节转速的方式相同。
即调节LCD模块滚轮或改变代码中PWM波占空比。
而如果要改变转速的初始值,则需要改变代码系统时钟分频,产生所需频率的PWM 波。
6 总结
此次试验中需要注意的问题是注意S4开关的拨向,三个实验均不同,还有最后的高亮LED驱动需要跳线短接。
其他就比较顺利了。
遇到的问题是在步进电机驱动实验LCD模块没有准确的周期显示,改变代码后显示的只是相对值的大小,而且并没有解决这个问题,导致步进电机的控制实验显示的周期误差不正常,除此之外实验比较顺利。
7 参考文献
[1] TEXAS INSTRUMENTS使用手册.
卑微如蝼蚁、坚强似大象.。