小车的驱动模块
驱动电机小车实验报告

驱动电机小车实验报告1. 引言驱动电机小车是一种常见的机器人模型,通过驱动电机的控制,可以实现小车的运动和导航。
本实验旨在通过搭建驱动电机小车,并编写控制程序,探究电机控制的原理和方法。
2. 实验设备和材料- 驱动电机小车模型- Arduino开发板- 电机驱动模块- 电源- 面包板- 连接线3. 实验原理驱动电机小车的运动依靠电机的转动来实现,电机驱动模块可以控制电机的转速和方向。
Arduino开发板是一个常用的微控制器,可以通过编写程序实现对电机驱动模块的控制。
4. 实验步骤4.1 搭建电路连接首先将Arduino开发板连接到电脑上,并打开Arduino IDE。
然后将电机驱动模块的控制引脚与Arduino开发板的数字引脚相连,同时连接好电源线和电机线。
4.2 编写控制程序在Arduino IDE中打开新建一个项目,编写以下控制程序:C++定义电机驱动模块的引脚号int motorPin1 = 2;int motorPin2 = 3;void setup() {设置引脚为输出模式pinMode(motorPin1, OUTPUT);pinMode(motorPin2, OUTPUT);}void loop() {控制电机正向转动digitalWrite(motorPin1, HIGH);digitalWrite(motorPin2, LOW);delay(1000);控制电机停止digitalWrite(motorPin1, LOW);digitalWrite(motorPin2, LOW);delay(1000);控制电机反向转动digitalWrite(motorPin1, LOW);digitalWrite(motorPin2, HIGH);delay(1000);控制电机停止digitalWrite(motorPin1, LOW);digitalWrite(motorPin2, LOW);delay(1000);}4.3 上传程序到Arduino将Arduino开发板通过USB线连接到电脑,选择好对应的开发板和端口,然后点击上传按钮将程序上传到Arduino开发板。
智能跟随小车设计

智能跟随小车设计喻语嫣*肖明杰(武汉文理学院信息与计算机学院 湖北武汉 430345)摘要:随着我国智能行业的飞速发展,解放人类劳动力的理念不断普及,智能跟随小车出现在人们视野里,它可以解放人们双手,提高物品搬运的效率,减轻人们的负担同时为其他工作节约时间。
基于此,该文设计了一款基于红外技术和超声波测距的智能跟随小车。
小车以AT89C52芯片为核心控制器,3个人体红外传感器HC-SR501用于识别人所在的位置,把识别到的信号通过核心控制器传送给L298N电机驱动模块,从而实现对小车转向和行驶的控制;超声波传感器HC-SR04用于检测人与小车之间的距离,当距离小于0.5 m时,实现小车报警同时后退,保证人与小车之间的安全距离,防止发生碰撞。
样机测试结果显示,小车能在 4 m 以内对人自动跟随,并与人保持0.5 m的安全距离,防止碰撞,具有一定的实用价值。
关键词:AT89C52 红外技术 超声波测距 跟随小车中图分类号:TP23文献标识码:A 文章编号:1672-3791(2023)18-0033-07Design of Intelligent Following CarsYU Yuyan*XIAO Mingjie(School of Information and Computer, Wuhan College of Arts & Sciences, Wuhan, Hubei Province, 430345 China) Abstract:With the rapid development of the intelligent industry in China, the concept of liberating human labor force continues to be popularized, and the intelligent following car appears in people's vision. It can free people's hands, im‐prove the efficiency of goods handling, reduce the burden and save time for other work. Based on this, this paper designs an intelligent following car based on infrared technology and ultrasonic ranging. The car uses the AT89C52 chip as its core controller, uses three pyroelectric infrared sensors HC-SR501 to identify the position of the person, and transmits the identified signal to the L298N motor drive module through the core controller, so as to realize the control of the car's steering and driving. It uses the ultrasonic sensor HC-SR04 to detect the distance between people and cars, and the car gives and alarm and retreats at the same time when the distance is less than 0.5m, so as to ensure the safe distance be‐tween people and cars and prevent collision, which has certain practical value.Key Words: AT89C52; Infrared technology; Ultrasonic ranging; Following car近年来,随着科学技术的飞速发展,智能移动机器人技术也在不断发展,传统的机械运输方式有被取代的趋势。
汽车驱动单元结构

汽车驱动单元结构
汽车驱动单元的结构包括发动机、传动系统和驱动轮等组成部分。
1. 发动机: 发动机是驱动单元的核心部件,负责产生动力以驱
动车辆行驶。
根据不同的动力类型,发动机可分为内燃机和电动机等。
内燃机又分为汽油发动机和柴油发动机。
2. 传动系统: 传动系统将发动机产生的动力传递给驱动轮,以
推动车辆前进或倒退。
传动系统包括离合器、变速器和传动轴等组成部分。
离合器用于在发动机和变速器之间建立或中断动力传递的连接,变速器用于调整发动机输出的扭矩和转速以适应不同的行驶条件。
3. 驱动轮: 驱动轮是汽车与地面接触的轮胎,通过传动系统中
的传动轴将发动机的动力传递给驱动轮,从而推动车辆行驶。
驱动轮可以是前驱轮、后驱轮或四驱轮,取决于车辆的驱动方式。
除了以上组成部分外,驱动单元还包括润滑系统、冷却系统和排气系统等辅助设备。
润滑系统用于保持发动机各零部件间的润滑状态,以减少磨损和摩擦。
冷却系统用于降低发动机的温度,以防止发动机过热。
排气系统用于排出发动机燃烧产生的废气,以保持发动机正常工作。
所有这些组成部分相互配合,共同组成了汽车驱动单元的结构,实现了车辆的正常行驶。
小车驱动程序

P22=1;
P23=0; //以上两行表示前轮右偏转
//P25 = 0;
P24 = 1; //后轮正转
_delay_ms(20); //延时20ms
P24 = 0; //后轮停转
_delay_ms(10); //延时10ms
P22 = 0;
P23 = 0; //以上两行表示前轮不偏转(回位)
}
*/
sbit P23 = P2^1;
sbit P24 = P2^2;//后轮
sbit P25 = P2^3;
sbit L_3=P1^0;
sbit L_2=P1^1; //红外传感IO口
sbit L_1=P1^2;
/************************/
/*延时函数*/
void _delay_ms(unsigned int time)
while(L_1==0&&L_2==0&&L_3==1)/*左微转*/
{
P22=0;
P23=1; //以上两行表示前轮左偏转
//P25 = 0;
P24 = 1; //后轮正转
_delay_ms(10); //延时10ms
P24 = 0; //后轮停转
_delay_ms(10); //延时10ms
P22 = 0;
#include<stdio.h>
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
/******************************/
/*定义输入输出口设定*/
基于51单片机的四驱无线遥控小车(附电路图,源代码)

基于51单片机的四驱无线遥控小车(附电路图,源代码)遥控小车大家都玩过,网上也有各种DIY小车的制作详解,本文介绍的这个遥控小车和其他的作品大同小异,但作为单片机设计,这次设计主要强调单片机控制,就是说,这个小车是由单片机控制的,把单片机按键发送程序、无线模块使用、电机驱动是本教程的核心内容。
一硬件组装1 小车运动部分所需工件:直流电机4个,L293D电机驱动模块,蓄电池一块,车身底盘说明:车身底盘大家根据自己的购买力自行购买,蓄电池也是,至于L293D模块,淘宝上卖的比较贵,不过我用的就是成品模块,效果非常好,钱不多的同学可以自己买芯片,自制模块,原理很简单,官方资料是很详细的;或者改为继电器控制都可以,具体看自己的实际购买力。
用模块的好处是,模块可以输出5V 电源给系统供电,详细请参考淘宝网。
如果你买的是现成的底盘,那就和我的一样了,组装实在是没啥可说的,把电机固定上去就是,不行?别开玩笑了,小学生都会的!至于想自己做底盘的,我想说,要搞结实点,咱这次的小车马力是很足的,因为有电机驱动,速度比较快(不带减速齿轮的底盘一定要小心,速度非常的快),后劲也足,不小心撞墙很正常,所以不好的底盘就得小心了!组装好后,就是电机和驱动模块的接线了,下面我就详细的说一下L293D模块的使用:L293D是专门的电机驱动芯片,工作电压5V,驱动电压输入可达36V,输出电流正负600ma,4个控制端,4个输出端,原理如图:其中A为输出控制端,Y为输出控制端,1A即控制1Y,以此类推。
1,2EN 3,4EN需要短接,芯片最大工作电压不得超过7V。
封装图:Vcc1接工作电压,5V,Vcc2接电机的驱动电源,一般来说,这个电压要比5V 高,我用的是12V蓄电池,就把12v的正极接到VCC2,要记住的是,芯片、单片机、蓄电池电源是需要共地的,不要觉得你电机是12V,单片机控制部分是5V就把电源完全独立开来,正极是完全独立的没错,但是GND(负极)都必须是接在一起的。
基于1ED020I12FA的汽车级IGBT模块驱动电路

基于1ED020I12FA的汽车级IGBT模块驱动电路
电路结构框图
本设计采用模块化设计,主要分为低压信号模块电路,驱动输出高压电路,和IGBT 电路,主要IC 为英飞凌1ED020I12FA,IGBT 为英飞凌HybridPACK2。
图1 以U 相为例介绍总图结构。
1ED020I12FA 及其低压信号部分电路相关说明
功能说明
如图2 半桥的上臂和下臂各用一片1ED,IN+作为PWM 信号的输入脚与对应的另一个1ED 芯片的IN-连接作为互锁,硬件上没有包含死区电路。
RDY 和FLT 脚连在一起经过与门送出一个总故障, 4.7k 上拉电阻和10n 电容保证信号的可靠性和抗干扰能力,与门输出放一个0603 封装LED 作为故障指示,方便试验和调试,没有实际的电气作用。
RST 引脚经过各自的RC 滤波电路后连接在一起,共用一个总复位。
PCB layout 要点
RST,RDY 和FLT 作为敏感信号容易受到干扰而误动作,因此需把滤
波电容放在贴近芯片引脚的位置。
RDY 和FLT 的引线要尽量短,后面的与门
是个只有TSSOP5 封装的IC,非常容易放在芯片附近。
图中C5,C9 应尽量贴近18 脚和20 脚。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
无线遥控小车
龙源期刊网
无线遥控小车
作者:黄建能杨光杰
来源:《现代电子技术》2012年第23期
摘要:随着电子技术的飞速发展,单片机与无线遥控已被广泛的应用到日常生活及工业中,成为测控技术现代化必不可少的重要工具。
设计的无线遥控小车由四部分组成:主控模块、无线通信模块、电机驱动模块和电源模块。
主控模块采用STC89C52单片机作为处理器;无线通信模块采用芯片PT2262和PT2272实现无线收发;用内置两个H桥的L298芯片驱动直流电机实现对小车的控制,实现前进、后退,左转、右转以及加速、减速的动作。
整个无线遥控小车系统具有体积小、成本低、操作简单等优点,并具有一定的可扩展性。
关键词:遥控小车;通信模块;无线收发;STC89C52
中图分类号:TN92-34;TP2文献标识码:A文章编号:1004-373X(2012)23-0126-03。
基于ARM单片机的智能小车循迹避障研究设计共3篇

基于ARM单片机的智能小车循迹避障研究设计共3篇基于ARM单片机的智能小车循迹避障研究设计1一、研究的背景近年来,随着机器人技术的不断发展,人们对智能小车的需求越来越高。
智能小车能够根据周围环境的变化,自动地进行信号处理和运动抉择,实现自主导航、路径规划和避障等功能。
在工业生产、物流配送、智能家居、环保治理等领域,智能小车具有广泛的应用前景。
二、研究的目的本文研究的目的是基于ARM单片机的智能小车循迹避障设计。
通过对小车的硬件组成和软件程序的设计,使小车能够自主进行行车,避免撞车和碰撞,并能够遵循预设的路径进行行驶,完成既定的任务。
三、研究的内容1. 小车的硬件组成小车的硬件组成主要包括以下方面:(1)ARM单片机:ARM单片机是一种高性能、低功耗的微处理器,广泛应用于嵌入式系统领域。
在本设计中,ARM单片机作为控制中心,负责控制小车的各项功能。
(2)直流电机:直流电机是小车的动力来源,通过电路控制,实现小车前进、后退、转弯等各种运动。
(3)红外循迹传感器:红外循迹传感器是小车的“眼睛”,能够检测和识别地面上的黑色和白色,实现循迹运行。
(4)超声波传感器:超声波传感器是小车的避障装置,能够探测小车前方的障碍物,实现自动避障。
(5)LCD液晶屏幕:LCD液晶屏幕是小车的显示器,能够显示小车行驶的速度、距离、角度等信息。
2. 小车的软件程序设计小车的软件程序设计分为两部分:一部分是嵌入式软件设计,另一部分是上位机程序设计。
(1)嵌入式软件程序设计嵌入式软件程序是小车控制程序的核心部分,负责控制小车硬件的各项功能。
具体实现过程如下:① 初始化程序:负责对小车硬件进行初始化和启动,包括IO口配置、计数器设置、定时器设置等。
② 循迹程序:根据红外循迹传感器所检测到的黑白线,判断小车的行驶方向。
如果是白线,则小车继续向前行驶;如果是黑线,则小车需要进行转向。
③ 路径规划程序:根据预设路径,计算小车应该按照什么路线进行行驶。
基于单片机的一种多功能玩具小车的设计与实现
随着科技的发展,单片机作为一种常用的微控制器,已经在各个领域得到了广泛应用。
在玩具领域,特别是玩具小车的设计中,单片机的运用也越来越普遍,可以实现各种有趣的功能。
本文将介绍一种基于单片机的多功能玩具小车的设计与实现。
二、设计目标1. 实现无线遥控功能,通过遥控器实现对小车的控制。
2. 设置超声波避障模块,让小车能够自动避开障碍物。
3. 小车可通过蓝牙模块与手机进行连接,实现手机APP控制。
4. 为小车设计多种灯光效果,增添趣味性。
5. 使用音乐模块,使小车产生丰富的声音效果。
三、硬件设计1. 主控芯片选择了常用的Arduino单片机。
2. 驱动模块选用了直流电机驱动模块,实现小车的前进、后退和转向。
3. 采用了超声波传感器模块,用于检测障碍物并实现避障功能。
4. 蓝牙模块选用了蓝牙串口模块,实现与手机的数据传输和控制。
5. 设计了多种灯光效果,包括LED灯和彩色灯带。
6. 音乐模块选用了声音传感器模块,可以发出不同的声音效果。
四、软件设计1. 编写了小车的控制程序,包括前进、后退、左转、右转等基本控制2. 通过编写遥控器程序,实现了对小车的无线遥控功能。
3. 编写了避障算法,使小车能够自动避开障碍物。
4. 开发了手机APP,通过蓝牙模块与小车进行连接和控制。
5. 设计了多种灯光效果的控制程序,可以实现闪烁、变色等效果。
6. 编写了音乐模块的程序,可以根据指令发出不同的声音效果。
五、实现效果1. 小车可以通过遥控器实现前进、后退、左转、右转的基本功能。
2. 超声波传感器可以准确检测到障碍物,并成功避开。
3. 通过手机APP可以实现对小车的遥控和控制各种功能。
4. 多种灯光效果可以有效增加小车的趣味性。
5. 音乐模块发出的声音效果丰富多彩,增加了小车的趣味性。
六、总结与展望本文介绍了一种基于单片机的多功能玩具小车的设计与实现,通过结合硬件设计和软件设计,实现了多种有趣的功能。
未来,可以进一步优化设计,增加更多的传感器模块和功能模块,使小车的功能更加丰富多样。
循迹小车四电机驱动程序

if(pwm_val_left>=10)
pwm_val_left=0;
}
else Left_moto_pwm=0;
}
/******************************************************************/
/*
右电机调速
*/
void pwm_out_right_moto(void)
P1_0 P1_1 P1_2 P1_3
//四路寻迹模块接口第一路 //四路寻迹模块接口第二路 //四路寻迹模块接口第三路 //四路寻迹模块接口第四路
#define Left_moto_go
{P3_4=0,P3_5=1;} //P3_4 P3_5 接 IN1 IN2
当
P3_4=0,P3_5=1; 时左电机前进
#define Right_moto_stp {P3_6=1,P3_7=1;} //P3_6 P3_7 接 IN1 IN2 当
P3_6=1,P3_7=0; 时右电机停转
unsigned char pwm_val_left =0;//变量定义
unsigned char push_val_left =0;// 左电机占空比 N/10
#define Left_moto_back
{P3_4=1,P3_5=0;} //P3_4 P3_5 接 IN1 IN2
当
P3_4=1,P3_5=0; 时左电机后退
#define Left_moto_stp
{P3_4=1,P3_5=1;} //P3_4 P3_5 接 IN1 IN2
当
P3_4=1,P3_5=1; 时左电机停转
{ push_val_left =5; //PWM 调节参数 1-10
电动智能小车(完整论文)

摘要89s52单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评。
这里介绍的是如何用89s52单片机来实现课程设计,该设计是结合科研项目而确定的设计类课题。
本系统以设计题目的要求为目的,采用89s52单片机为控制核心,利用超声波传感器检测道路上的障碍,控制电动小汽车的自动避障,慢速行驶,以及自动停车.整个系统的电路结构简单,可靠性能高。
实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。
采用的技术主要有:(1)通过编程来控制小车的速度;(2)传感器的有效应用;(3)新型显示芯片的采用.关键词89s52单片机超声波传感器电动小车目录第一章前言 (1)第二章方案设计与论证 (2)一直流调速系统 .................................... 错误!未定义书签。
二检测系统 (2)三显示电路 ........................................ 错误!未定义书签。
四系统原理图 (2)第三章硬件设计 (3)一 80C51单片机硬件结构............................ 错误!未定义书签。
二最小应用系统设计 (3)三 111前向通道设计................................ 错误!未定义书签。
四 111后向通道设计................................ 错误!未定义书签。
五 111显示电路设计................................ 错误!未定义书签。
第四章软件设计 .. (7)一主程序设计 (7)二333 显示子程序设计.............................. 错误!未定义书签。
三避障子程序设计 (11)四软件抗干扰技术 (11)五 333“看门狗”技术 .............................. 错误!未定义书签。
新能源汽车驱动电机系统检测与维修电子课件模块三驱动电机控制器的检测与维修

课题 驱动电机控制器的检测与维修
二、驱动电机控制器的工作原理
1. 驱动电机系统的控制策略 驱动电机控制器采用三相两电平电压源型逆变器,整车控制器(VCU)发出指令,通过 CAN 线传输到驱动电机控制器主板,驱动电机控制器主板经过逻辑换算和确定旋转变压器的 转子位置,再发信号驱动IGBT 模块,IGBT 模块输出三相交流电使电机旋转。驱动电机控制 器主板对所有的输入信号进行处理,并将驱动电机控制器运行状态的信息反馈给整车控制 器。驱动电机控制器内含故障诊断电路。当诊断出异常时,它将会激活一个错误代码,同时 存储该故障码和数据或发送给整车控制器。驱动电机系统原理图如图3-1-10 所示。
课题 驱动电机控制器的检测与维修
(1)Ⅰ代驱动电机控制器 Ⅰ代驱动电机控制器的显著特点是金属壳体上需要设计水道,水流与IGBT 不进行任何接 触,IGBT 散发出的热量需要通过其下部的金属底板,依靠传导方式传递给壳体外侧的冷却水 进行散热。为减少传导热阻,通常需要在IGBT 金属底板上涂抹导热硅脂后再与主壳体贴合。 图3-1-6 所示为Ⅰ代驱动电机控制器总布置,图3-1-7 所示为主壳体水道造型,图3-1-8 所 示为Ⅰ代驱动电机控制器高压线束接口。
课题 驱动电机控制器的检测与维修
(2)R 挡行驶 当驾驶员挂R 挡时,驾驶员请求信号发给VCU,再通过CAN 发送给MCU,此时MCU 结 合当前转子位置(旋转变压器)信息,通过改变IGBT 模块改变W、V、U 通电顺序,进而控 制驱动电机反转。
课题 驱动电机控制器的检测与维修
4. 驱动电机系统的发电模式 当车辆在滑行或制动时,整车控制器 检测到满足启动能量回收的条件时,发出 能量回收指令,IGBT 模块输出为0,电机 停止工作,驱动车轮通过传动系统使电机 转子旋转,此时电机就成了发电机,输出 三相正弦交流电,通过IGBT 模块转换成 直 流 电 向 动 力 蓄 电 池 充 电 , 如 图 3-1-12 所示。
智能小车驱动模块

智能小车文档(初步)小车驱动模块小车的驱动模块的核心是H桥驱动电机组成的L298芯片。
相关元器件如下:相关资料如下:一、H桥驱动电路的内部原理解析如下:图1中所示为一个典型的直流电机控制电路。
电路得名于“H桥驱动电路”是因为它的形状酷似字母H。
4个三极管组成H的4条垂直腿,而电机就是H中的横杠。
如图所示,H桥式电机驱动电路包括4个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
图1 H桥驱动电路要使电机运转,必须使对角线上的一对三极管导通。
例如,如图2所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。
按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
图2 H桥电路驱动电机顺时针转动图3所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。
当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
图3 H桥驱动电机逆时针转动驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。
如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。
图4 所示就是在基本H桥电路的基础上增加了4个与门和2个非门。
4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。
而2个非门通过提供一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。
图4 具有使能控制和方向逻辑的H桥电路采用以上方法,电机的运转就只需要用三个信号控制:两个方向信号和一个使能信号。
小车控制电路原理图
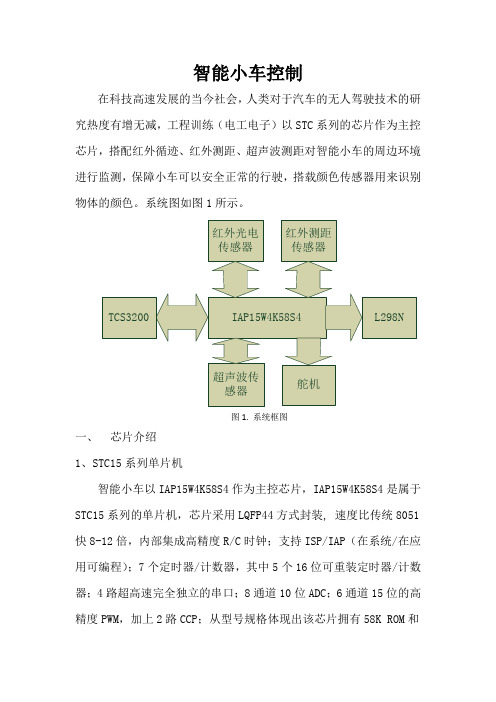
智能小车控制在科技高速发展的当今社会,人类对于汽车的无人驾驶技术的研究热度有增无减,工程训练(电工电子)以STC系列的芯片作为主控芯片,搭配红外循迹、红外测距、超声波测距对智能小车的周边环境进行监测,保障小车可以安全正常的行驶,搭载颜色传感器用来识别物体的颜色。
系统图如图1所示。
图1. 系统框图一、芯片介绍1、STC15系列单片机智能小车以IAP15W4K58S4作为主控芯片,IAP15W4K58S4是属于STC15系列的单片机,芯片采用LQFP44方式封装,速度比传统8051快8-12倍,内部集成高精度R/C时钟;支持ISP/IAP(在系统/在应用可编程);7个定时器/计数器,其中5个16位可重装定时器/计数器;4路超高速完全独立的串口;8通道10位ADC;6通道15位的高精度PWM,加上2路CCP;从型号规格体现出该芯片拥有58K ROM和4K RAM。
实物图如图2所示。
图2. IAP15W4K58S4实物图2、颜色传感器TCS3200颜色传感器TCS3200是TAOS公司推出的可编程彩色光到频率的转换器,采用8引脚表面贴装形式封装(如图3所示),它把可配置的硅光电二极管与电流频率转换器集成在单一的CMOS电路上,同时在芯片上集成四种不同的滤光器:红、绿、蓝(RGB)三种滤光器各16个,不带任何过滤器16个。
为了保证能够尽量减少入射光辐射不平衡,这64个过滤器是交叉排列,从而可以提高颜色识别率。
由于可以驱动标准的TTL或CMOS逻辑输入,所以可直接与MCU或其他逻辑电路相连接,并且可以直接输出数字量,并且能够实现每个彩色信道10位以上的转换精度,因而不再需要A/D转换电路,使电路变得更简单。
图3. TCS3200实物图TCS3200颜色传感器原理图如图4所示,利用三原色理,采集被测物的颜色,即各种颜色都是有三种颜色组成的,通过对芯片的S2、S3引脚编程选择不同的滤波器,它只能让某种特定的原色通过,经过电流到频率转换器后输出不同的方波,不同的颜色和光强对应不同频率的方波。
基于STM32的智能循迹避障小车

基于STM32的智能循迹避障小车智能循迹避障小车是一种基于STM32微控制器的智能机器人车,它具有智能避障、循迹导航等功能。
它通过使用红外传感器、超声波传感器等传感器来感知周围环境,并通过STM32微控制器来实现对传感器数据的处理和控制小车的运动。
本文将介绍基于STM32的智能循迹避障小车的原理、设计和制作过程。
一、智能循迹避障小车的原理1.1 系统架构智能循迹避障小车主要由STM32微控制器、电机驱动模块、传感器模块和电源模块组成。
STM32微控制器用于控制小车的运动和感知周围环境;电机驱动模块用于控制小车的电机运动;传感器模块用于感知周围环境,包括红外传感器、超声波传感器等;电源模块用于为整个系统提供电源供应。
1.2 工作原理智能循迹避障小车主要工作原理是通过传感器模块感知周围环境的障碍物和地面情况,然后通过STM32微控制器对传感器数据进行处理,再控制电机驱动模块完成小车的运动。
在循迹导航时,小车可以通过红外传感器感知地面情况,然后根据传感器数据进行反馈控制,使小车能够按照预定路径行驶;在避障时,小车可以通过超声波传感器感知前方障碍物的距离,然后通过控制电机的速度和方向来避开障碍物。
2.1 硬件设计智能循迹避障小车的硬件设计主要包括电路设计和机械结构设计。
电路设计中,需要设计STM32微控制器和传感器、电机驱动模块的连接电路,以及电源模块的电源供应电路;机械结构设计中,需要设计小车的外观和结构,以及安装电机、传感器等模块的位置和方式。
2.2 软件设计智能循迹避障小车的软件设计主要包括STM32程序设计和智能控制算法设计。
STM32程序设计中,需要编写STM32微控制器的程序,包括对传感器数据的采集和处理,以及对电机的控制;智能控制算法设计中,需要设计循迹导航算法和避障算法,以使小车能够智能地进行循迹导航和避障。
2.3 制作过程制作智能循迹避障小车的过程主要包括电路焊接、机械结构装配、程序编写和调试等步骤。
无线遥控小车实训报告

一、实训背景随着科技的不断发展,自动化和智能化技术日益普及。
无线遥控小车作为自动化领域的一个典型应用,不仅可以锻炼学生的动手能力,还能提高对电子技术、单片机原理、无线通信等方面的理解。
本次实训旨在通过设计和制作无线遥控小车,使学生掌握相关电子技术和编程技能。
二、实训目的1. 熟悉无线通信技术在遥控系统中的应用。
2. 掌握单片机编程及外围电路设计。
3. 了解电机驱动电路的设计原理。
4. 培养团队合作精神和实践能力。
三、实训内容1. 硬件选型本次实训所选用的硬件包括:- 主控芯片:AT89C51单片机- 无线通信模块:nRF24L01- 电机驱动模块:L298N- 电机:直流电机- 电源模块:锂电池- 其他元件:电阻、电容、二极管等2. 系统设计无线遥控小车系统主要由以下几个部分组成:- 遥控器:负责发送控制信号- 接收模块:接收遥控器发送的控制信号- 主控模块:根据接收到的信号控制小车运动- 电机驱动模块:驱动电机实现小车运动3. 软件设计软件设计主要包括以下内容:- 遥控器程序:实现按键扫描和信号发送- 接收模块程序:实现信号接收和解码- 主控模块程序:根据接收到的信号控制小车运动4. 系统调试在完成硬件组装和软件编写后,进行系统调试,确保小车能够按照预期运行。
调试过程中,主要关注以下几个方面:- 无线通信是否稳定- 控制信号是否准确- 小车运动是否平稳四、实训过程1. 硬件组装根据系统设计,将各个模块连接起来,包括单片机、无线通信模块、电机驱动模块、电机等。
2. 软件编写使用C语言编写遥控器、接收模块和主控模块的程序。
在编写过程中,注意以下事项:- 代码结构清晰,便于阅读和维护- 代码注释完整,便于理解- 注意信号处理和电机控制算法3. 系统调试在完成硬件组装和软件编写后,进行系统调试。
首先,检查无线通信是否稳定,确保遥控器能够发送和接收信号。
然后,测试控制信号是否准确,观察小车运动是否平稳。
循迹小车设计方案

循迹小车设计方案1. 引言循迹小车是一种基于图像处理和电机控制的智能机器人,它可以通过感知地面上的黑色轨迹线来自动移动。
本文档将详细介绍循迹小车的设计方案,包括硬件组件、电路连接和代码实现等。
2. 硬件组件循迹小车的硬件组件主要包括以下几个部分:2.1 微控制器微控制器是循迹小车的核心控制单元,负责接收和处理传感器的数据,并控制电机的运动。
常用的微控制器有Arduino、Raspberry Pi等。
本设计方案以Arduino为例进行介绍。
2.2 循迹模块循迹模块是用于感知地面上的黑色轨迹线的传感器,它通常由多个红外线传感器阵列组成。
传感器阵列会发射红外线向地面照射,当光线被黑色轨迹线吸收时,传感器会检测到光线的变化。
通过检测多个传感器的输出,可以确定小车当前位置的偏移量。
常用的循迹模块有TCRT5000、QTR-8A等。
2.3 电机驱动模块电机驱动模块用于控制小车的电机,使其能够前进、后退和转向。
常用的电机驱动模块有L298N、TB6612FNG等。
2.4 电源模块电源模块为循迹小车提供电能,通常使用锂电池或者干电池。
3. 电路连接循迹小车的电路连接如下图所示:┌───────────┐│ Arduino │└─────┬─────┘│▼┌───────────┐│ 循迹模块│└─────┬─────┘│▼┌───────────┐│ 电机驱动│└─────┬─────┘│┌─────────────────────────┐│ 左电机右电机│└─────────────────────────┘连接步骤如下:1.将循迹模块的信号引脚连接到Arduino的数字引脚上。
2.将电机驱动模块与Arduino的数字引脚连接,用于控制电机的运动。
3.将左电机的正极和负极分别连接到电机驱动模块的输出端口。
4.将右电机的正极和负极分别连接到电机驱动模块的输出端口。
5.将Arduino和电机驱动模块连接到同一个电源模块上。
基于单片机的WiFi智能小车设计
基于单片机的WiFi智能小车设计作者/胡城瑜,成都理工大学信息科学与技术学院文章摘要:单片机就是一种电路集成芯片,主要是采用线路集成技术将电路数据处理后,连接到硅片上构成一个类似于微型计算机的系统。
单片机在工业生产控制中应用比较广泛。
在信息技术智能化发展的今天,单片机WiFi智能小车系统应运而生。
文章据此,主要分析单片机的WiFi智能小车系统的作用和特点。
关键词:单片机;WiFi;智能小车;系统引言智能设备正逐渐代替人工设备,单片机的WiFi智能小车设计主要组成部分有小车车体、电机驱动和电源、舵机、摄像头等。
单片机中的WiFi智能小车设计主要是为了通过终端智能设备发送、控制指令,实现小车的视频数据采集。
1.单片机WiFi智能小车系统内容■1.1总体构造信息科技水平的提高,促进了人们对人工智能系统的研究和应用,智能小车的应用范围较广,在单片机WiFi智能小车系统设计中,主要是将单片机作为控制芯片,科学获取障碍物距离小车的距离,这个数据是由超声波来控制距离测定的。
基本路况和小车行驶情况都可以根据信息反馈来获取。
单片机的WiFi智能小车系统总体构造由主控模块、驱动模块和避障模块构成。
主控模块主要根据小车的行驶情况和路障情况进行方向和路线的判断、选择,控制其电机信号的输入输出。
驱动模块主要是为了对小车的速停、速动进行调制。
避障模块也包括循迹模块的内容,这也是单片机智能小车系统设计的核心内容,主要是利用红外线和超声波等进行信息探测、收集。
单片机WiFi智能小车西系统构造总体上可以分为软件部分和硬件部分,硬件部分的核心是控制器,软件核心则是程序编码、设计。
[1]■1.2软件设计单片机WiFi智能小车系统中的软件设计构成有主程序、中断子程序、电机驱动子程序和调速子程序等,主要功能就是信号的监测、采集、分析和控制。
电机的路障躲避、左右转动和前后进退等都需要软件控制速度和方向。
单片机的系统设计、调制中需要利用计算机网络程序完成编程、初始化等工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
小车的组成
1、小车的运动性能取决于:它的电源模块和电机驱动模块
2、电源模块:为整个系统提供动力支持的部分。
电机驱动模块:驱动小车轮子的转动,是小车行进。
3、小车的驱动系统一般由控制器、功率变换器及电动机三个主要部分组成。
4、小车的驱动不但要求电机驱动系统具有高转矩重量比、宽调速范围、高可靠性,而且电机的转矩-转速特性受电源功率的影响,这就要求驱动具有尽可能宽的高效率区。
5、电机一般为直流电机,主要用到永磁直流电机、伺服电机及电机三种。
直流电机的控制很简单,性能出众,直流电源也容易实现。
6、直流电机的驱动及控制需要电机驱动芯片进行驱动。
常用的电机驱动芯片有:
L297/298 ,MC33886 , ML4428.等
L298N内不包含4通道逻辑驱动电路。
是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A 以下的电机。
PWM调速
在对直流电动机电压的控制和驱动中,半导体功率器件(L298)在使用上可以分为两种方式:
线性放大驱动方式和开关驱动方式在线性放大驱动方式,半导体功率器件工作在线性区。
优点:控制原理简单,输出波动小,线性好,对邻近电路干扰小。
缺点:功率器件工作在线性区,功率低和散热问题严重。
开关驱动方式是使半导体功率器件工作在开关状态,通过脉调制(PWM )来控制电动机的电压,从而实现电动机转速的控制。
当开关管的驱动信号为高电平时,开关管导通,直流电动机电枢绕组两端有电压U. t1秒后,驱动信号变为低电平,开关管截止,电动机电枢两端电压为0.
t2秒后,驱动信号重新变为高电平,开关管的动作重复前面的过程。
输出波形和计算
电动机的电枢绕组两端的电平平均值U 为:
U
D T U t t t U t U //)*1()21/()*1(==+=
其中D 为占空比,T t D /=。