万向铰链
铰链的种类-铰链分类【大全】
铰链的种类-铰链分类内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.铰链又称合页是用来连接两个固体并允许两者之间做相对转动的机械装置。
铰链可由可移动的组件构成,或者由可折叠的材料构成。
合页主要安装于门窗上,而铰链更多安装于柜体家具上,按材质分类主要分为,不锈钢铰链和铁铰链;为让人们得到更好的享受又出现了液压铰链(阻尼铰链),其特点是在柜门关闭时带来缓冲功能,最大程度的减小了柜门关闭时与柜体碰撞发出的噪音。
铰链种类与用途介绍1、直弯铰链门板盖住柜体18mm厚侧板的全部(即门板盖住侧板17mm),所用的铰链就是直弯铰链。
(1)铰链孔距默认110mm;(2)装铰链的侧板内空深度要大于70mm;(3)直弯铰链最大只能盖侧板17mm,所以25mm、35mm厚度的侧板门板全盖最大也只能盖住17mm。
2、中弯铰链门板盖住柜体18mm厚侧板的一半(即门板盖住侧板8mm),所用的铰链就是中弯铰链。
(1)铰链孔距边默认110mm;(2)装铰链的侧板内空深度要大于70mm;(3)中弯铰链最大只能盖侧板8mm。
3、大弯铰链门板完全不盖住柜体的侧板(即门板盖住侧板0mm),所用的铰链就是大弯铰链。
(1)铰链孔距边默认110mm;(2)装铰链的侧板内空深度要大于70mm;(3)大弯铰链相对于侧板是内嵌效果的,适用于各种厚度的侧板。
4、165°直弯铰链165°直弯铰链与普通的直弯铰链工艺是一样的,只是门板打开角度不一样,普通直弯铰链门板打开的角度为90°,165°的直弯铰链门板打开的角度是165°。
(1)铰链孔距边默认110mm;(2)装铰链的侧板内空深度要大于70mm;(3)165°直弯铰链最大只能盖侧板17mm,所以25mm、35mm厚度的侧板门板座全盖,最大也只能盖住17mm;(4)常用于转角柜门板。
万向铰自由度
万向铰自由度万向铰是一种常用于机械系统中的关节,它具有多个自由度,能够实现多方向的旋转运动。
在工程领域中,万向铰被广泛应用于各种机械装置和机器人系统中,为其提供灵活的运动能力和多样化的功能。
万向铰的自由度是指其能够自由旋转的轴线的数量。
一般来说,万向铰具有三个自由度,分别对应于三个互相垂直的旋转轴。
这三个轴可以是任意的,但通常是以直角坐标系的三个轴为基准。
通过控制这三个轴的旋转,万向铰可以实现在三个方向上的自由旋转。
由于万向铰的自由度较高,它能够实现更加灵活的运动。
在机械装置中,万向铰常用于连接两个部件,使它们能够相对自由地旋转。
这样,机械装置就能够在多个方向上实现旋转运动,从而适应不同的工作需求。
在机器人系统中,万向铰的应用也非常广泛。
机器人通常需要具备灵活的运动能力,以适应不同的工作场景和任务要求。
万向铰能够为机器人提供多自由度的运动能力,使其能够在三维空间中自由移动和旋转。
这样,机器人就能够更加灵活地完成各种任务,提高工作效率和精度。
除了在机械装置和机器人系统中的应用,万向铰还常见于航空航天领域。
在航天器的控制系统中,万向铰被用于实现航向控制、姿态控制和稳定性控制等功能。
通过控制万向铰的旋转角度,航天器可以调整自身的姿态和飞行方向,以实现精确的控制和导航。
除了以上应用领域,万向铰还有许多其他的应用。
例如,在摄影和摄像领域,万向铰被用于相机云台和稳定器中,帮助摄影师和摄像师实现平稳的拍摄效果。
在工业生产线上,万向铰可以用于装配机械零件或调整产品的位置和角度。
在医疗器械中,万向铰可以用于手术机器人和检测设备,提供更精确和灵活的操作能力。
万向铰作为一种具有多自由度的关节,广泛应用于机械装置、机器人系统、航空航天和其他领域中。
它能够为这些系统提供灵活的运动能力和多样化的功能,使其能够适应不同的工作需求。
随着科技的不断发展和创新,相信万向铰的应用领域还会进一步扩展,为人们的生活和工作带来更多的便利和效益。
常用机构

12
1、棘轮齿形的选择 最常见的棘轮齿形为不对称梯形,如图所示。 为了便于加工,当棘轮机构承受载荷不大时,可采用三角 形棘轮轮齿(见图1),三角形轮齿的非工作齿面可作成直 线型和圆弧形。 双向式棘轮机构,由于需双向驱动,因此常采用矩形或对 称梯形作为棘轮齿形(图4)。
1
1
4
13
(1) 采用棘轮罩 如图7-9所示。改变 棘轮罩位置,使部分 行程内棘爪沿棘轮罩 表面滑过,从而实现 棘轮转角大小的调整。
11
运动由蜗杆1传到蜗轮2,通 过安装在蜗轮2上的棘爪3驱 动与棘轮4固联的输出轴5按 图示ω 5 方向慢速转动。当 需要输出轴5快速转动时, 可按输出轴5转动方向快速 转动输出轴5上手柄,这时 由于手动转速大于蜗轮转速, 所以棘爪在棘轮齿背滑过, 从而在蜗轮继续转动时,可 用快速手动来实现输出轴超 越蜗轮的运动。
(7—19)
3 1 1 max cos
而当φ 1=900或2700时,分母值最大,传动比值最小,其值为
3 cos 1 min
1. 滚动螺旋机构:滚动丝 杠 滑动螺旋机构 2.
多用于将转动 变移动的场合
◆A、B段螺旋旋向相 (l A lB ) s 同
l A 与 l B 相差很小
2
则 s 很小 称其为微调螺旋机 构
镗刀进刀量的微调螺旋机构
◆A、B段螺旋旋向相 反
s (l A lB ) 2
称其为复式螺旋机 构 车辆联接中的螺旋机 构
§12-4 万向铰链机构(万向联轴节)
一、单万向联轴节结构与运动情况 下图所示为单万向联轴节结构简图,当主动轴转一周, 从动轴也转动一周,但主动轴与从动轴的瞬时传动比不同。
5.2机动玩具常用机构类型
h
基圆 :以凸轮最小矢径 r0 为半径所作的圆 r0 →基圆半径 A点→起始、 转动 接触点: A → B 推程、推程角
→ 0 、行程→ h
B → C 远休程、远休
止角→ 01
C → D 回程、 回程角
→ ´0 D → A 近休程、近休止角→ 02
“死点”位置的过渡 “死点”位置的应用
5-1-2.实用示例 颚式碎石机
曲柄AB带动连杆BC和摇杆CD运动,固连在摇杆 上的动颚将矿石压碎。
锁紧夹具
利用连杆2和连架杆3成一线,形成机构死点, 来锁紧工件5。
机车主动轮双曲柄联动机构
为了克服不稳定状态,除了采用惯性飞轮外, 还采用了平行连接副加构件BE。
双摇杆机构
摇杆AB为原动件,通过连杆BC带动从动件CD也作 往复摆动,虚线AB1、AB2为摇杆AB的两极限位置, 也是当摇杆AB为原动件时,机构的两死点位置。
双曲柄机构
当曲柄AB为原动件作匀速回转时,曲柄CD跟随作周期性的匀速圆周回转, 当曲柄从位置AB1转过φ1角到位置AB2时,从动件CD转过180°,当曲柄从位 置AB2转过φ2角到位置AB1时,从动件CD转过180°,因为φ1>φ2 ,即t1>t2, 从动曲柄的角速度不是常数,而是作变角速度回转。
平面机构具有急回特性的条件: (1)原动件等角速整周转动; (2)输出件具有正、反行程的往复运动; (3)极位夹角Ө>0。 应用:节省回程时间,提高生产率
平面连杆机构的死点 对于曲柄摇杆机构,当摇杆为主动件时,在连杆
与曲柄两次共线的位置,机构均不能运动。 机构 的这种位置称为“死点”(机构的死点位置) 在“死点”位置,机构的传动角 γ=0。 “死点”位置应用: 飞机起落架、钻夹具等 “死点”位置的过渡: 依靠飞轮的惯性(如内燃机、 缝纫机等)、两组机构错开 排列,如火车轮联动机构。
膨胀节的类型和构造
膨胀节的类型和构造一、波纹膨胀节的类型波纹管配备相应的构件,形成具有各种不同补偿功能的波纹膨胀节。
按补偿形式分为轴向型、横向型、角向型及压力平衡型。
轴向型:普通轴向型、抗弯型、外压型、直埋型、直管力平衡型、一次性直埋型。
横向型:单向横向型、万向铰链横向型、大拉杆横向型、小拉杆横向型。
角向型:单向角向型、万向角向型。
以上是基本分类,每类都具备共同的功能。
在一些特定情况还可以有特殊功能,如耐腐蚀型、耐高温型。
按特定场合的不同,分为催化裂化装置用、高炉烟道用。
按用于不同介质分为:热风用、烟气用、蒸汽用等。
二、波纹膨胀节的结构1、轴向型波纹膨胀节(1)普通抽向型:是最基本的轴向膨胀节结构。
其中支撑螺母和预拉杆的作用是支撑膨胀节达到最大额定拉伸长度和到现场安装时调整安装长度(冷紧)。
如果补偿量较大,可用两节,甚至三节波纹管。
使用多节时,要增加抗失稳的导向限位杆。
(2)抗弯型:增加了外抗弯套筒,使整体具有抗弯能力。
这样可以不受支座的设置必须受4D、14D的约束,支架的设置可以将这段按刚性管道考虑。
(3)外压型:这种结构使波纹管外部受压,内部通大气。
外壳必须是密闭的容器,它的特点是:1)波纹管受外压不发生柱失稳,可以用多波,实现大补偿量。
2)波纹内不含杂污物及水,停气时冷凝水不存波纹内可从排污阀排掉不怕冷冻。
3)结构稍改进也具有抗弯能力。
(4)直埋型:它的外壳起到井的作用,把膨胀节保护起来.密封结构防止土及水进入。
实际产品分防土型和防土防水型。
对膨胀节的特殊要求是必须与管道同寿命。
(5)一次性直理型:它的使用是装在管线上后整个管线加热升温到管线的设计温度范围的中间温度,管线伸长,波纹管被压缩,两个套筒滑动靠近,然后把它们焊死,再由检压孔打压检验焊缝不漏即可。
它的特点是:1)焊死后波纹管再不起作用,它的寿命一次就够。
2)波纹管的设计压力按施工加热的压力设计。
材质用普通碳钢。
2、横向型波纹膨胀节(1)单向横向型:它只能在垂直于铰链轴的平面内弯曲变形。
六自由度平台
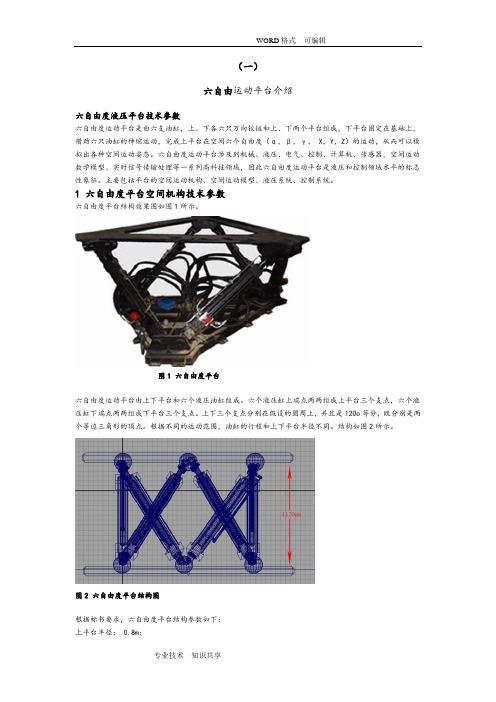
(一)六自由运动平台介绍六自由度液压平台技术参数六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(α,β,γ, X,Y,Z)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台涉及到机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理等一系列高科技领域,因此六自由度运动平台是液压和控制领域水平的标志性象征。
主要包括平台的空间运动机构、空间运动模型、液压系统、控制系统。
1 六自由度平台空间机构技术参数六自由度平台结构效果图如图1所示。
图1 六自由度平台六自由度运动平台由上下平台和六个液压油缸组成。
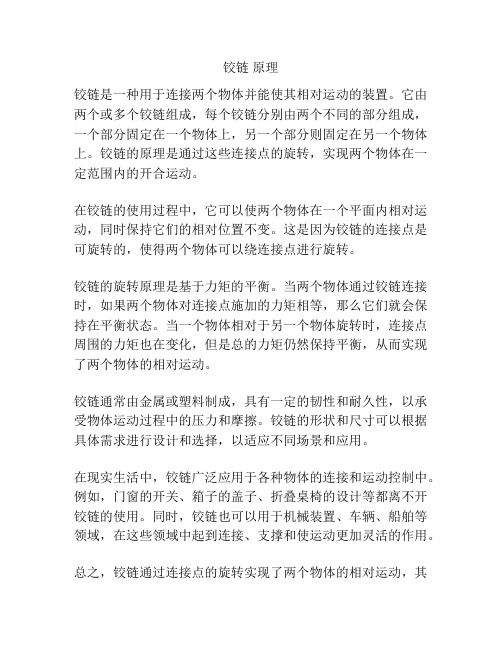
六个液压缸上端点两两组成上平台三个支点,六个液压缸下端点两两组成下平台三个支点。
上下三个支点分别在假设的圆周上,并且是120o等分,既分别是两个等边三角形的顶点。
根据不同的运动范围,油缸的行程和上下平台半径不同。
结构如图2所示。
图2 六自由度平台结构图根据标书要求,六自由度平台结构参数如下:上平台半径: 0.8m;下平台半径:0.85m ;油缸最低行程时上下平台垂直距离:约1.17m;油缸行程:±0.20m。
2 六自由度平台空间运动空间运动的目标是实现平台在空间运动的三个姿态角度和三个平动位移,即俯仰、滚转、偏航、上下垂直运动、前后平移和左右平移,及六个姿态的复合运动姿态。
而空间目标是通过六个液压缸的行程实现的,这就需要一个空间的运动模型完成空间运动的转换,假设空间运动的目标俯仰、滚转、偏航、上下垂直位移、前后平移和左右平移用α,β,γ,X,Y,Z表示,六个油缸的行程用L(i)(i=1、2、3、4、5、6)表示。
整个运动模型如下:L(i)=TT(α,β,γ,X,Y,Z)其中,TT是一个空间转换矩阵模型。
由此实时算出每一运动时刻液压油缸的行程。
液压油缸的理论行程再通过D/A接口的转换,给出实际行程值。
铰链 原理
铰链原理
铰链是一种用于连接两个物体并能使其相对运动的装置。
它由两个或多个铰链组成,每个铰链分别由两个不同的部分组成,一个部分固定在一个物体上,另一个部分则固定在另一个物体上。
铰链的原理是通过这些连接点的旋转,实现两个物体在一定范围内的开合运动。
在铰链的使用过程中,它可以使两个物体在一个平面内相对运动,同时保持它们的相对位置不变。
这是因为铰链的连接点是可旋转的,使得两个物体可以绕连接点进行旋转。
铰链的旋转原理是基于力矩的平衡。
当两个物体通过铰链连接时,如果两个物体对连接点施加的力矩相等,那么它们就会保持在平衡状态。
当一个物体相对于另一个物体旋转时,连接点周围的力矩也在变化,但是总的力矩仍然保持平衡,从而实现了两个物体的相对运动。
铰链通常由金属或塑料制成,具有一定的韧性和耐久性,以承受物体运动过程中的压力和摩擦。
铰链的形状和尺寸可以根据具体需求进行设计和选择,以适应不同场景和应用。
在现实生活中,铰链广泛应用于各种物体的连接和运动控制中。
例如,门窗的开关、箱子的盖子、折叠桌椅的设计等都离不开铰链的使用。
同时,铰链也可以用于机械装置、车辆、船舶等领域,在这些领域中起到连接、支撑和使运动更加灵活的作用。
总之,铰链通过连接点的旋转实现了两个物体的相对运动,其
原理是基于力矩的平衡。
它在现实生活中有着广泛的应用,为许多物体的开合和运动提供了方便和灵活性。
常用间歇运动机构

二、组合机构旳常见组合方式
◆并联式组合 输入
子机构Ⅰ
子机构Ⅱ
子 机 输出 构 Ⅲ
并联式组合是指机构 组合系统中,几种子 机构共用同一种输入 构件,而它们旳输出 运动又同步输入给一 种多自由度旳子机构, 从而形成自由度为1 旳机构系统。
二、组合机构旳常见组合方式
◆ 反馈式联式组合
输入
反馈式联式组合是指 机构组合系统
中,多自由度子机构旳一种输入运动 是经过单自由度子机构从多自由度子 机构旳输出构件回授旳,从而形成自 由度为1旳机构系统。
输出 子机构Ⅰ
子机构Ⅱ
二、组合机构旳常见组合方式
◆复合式组合 输入
子机构Ⅰ
输出 子机构Ⅱ
复合式组合是指机构组合系统中,由一种或几种串联旳基 本机构去封闭一种具有两个或多种自由度旳基本机构旳组 合方式称为复合式组合。
1. 构成 螺杆、螺母、机架
2. 机构特点
构造简朴、制造以便、运 动精确、能取得较大旳降速比 和力旳增益,工作平稳,无噪 音,合理选择螺纹导程角可具 有自锁性,但效率低,要反转 则需要反向装置。
3. 应用
常用在起重机、压力机及功率不大旳进给系统和微调装置中。
二、螺旋机构类型
1. 滚动螺旋机构:滚动丝杠 2. 滑动螺旋机构
二、槽论机构旳类型
◆外槽轮机构 ◆内槽轮机构
主、从动轮转向相反
主、从动轮转向相反, 且具有传动较平稳、 停歇时间短、所占空 间小等特点。
二、槽论机构旳类型(续)
不等臂长多销槽轮机构
特点:径向槽径向 尺寸不同,拨盘上 销分布不均匀。槽 轮转一周,能够实 现动停时间均不相 同旳运动要求。
二、槽轮机构旳类型(续)
◆组合机构旳附加机构:指组合机构中自由度为1旳基本 机构。
铰链的选择与安装技巧
铰链的选择与安装技巧
铰链在家具制作和安装中起着重要作用,正确的选择和安装铰链可以确保家具的稳固性和使用寿命。
首先,铰链的选择应考虑以下几个方面:
1. 材质,铰链通常由不锈钢、钢铁或铝合金制成。
不锈钢铰链具有耐腐蚀性和耐用性,适合用于厨房或浴室家具。
钢铁铰链价格较低,适合一般家具使用。
铝合金铰链轻巧且耐用,适合用于需要减轻重量的家具。
2. 类型,常见的铰链类型包括普通铰链、隐形铰链和角度调节铰链等。
根据家具的设计和功能需求选择合适的铰链类型。
3. 负重能力,不同规格的铰链有不同的负重能力,需要根据家具的重量和使用场景选择适当的铰链负重能力。
安装铰链时,需要注意以下技巧:
1. 精确测量,在安装铰链之前,需要精确测量家具的尺寸和铰链的位置,确保铰链安装的准确性和稳固性。
2. 预先定位,在安装铰链之前,可以使用铅笔在家具上标记铰链的位置,以便准确安装。
3. 使用合适的工具,安装铰链需要使用螺丝刀、电钻等工具,确保使用合适的工具,以免损坏铰链或家具。
4. 调整功能,在安装完铰链后,需要进行功能调整,确保铰链的开合顺畅,不卡滞。
总的来说,正确选择合适的铰链,并严格按照安装技巧进行安装,可以确保家具的质量和稳固性,提高家具的使用舒适度和安全性。
柜门铰链种类与用法
柜门铰链种类与用法
柜门铰链是作为连接柜门和柜体的重要部件之一,不仅可以使柜门具备开启和
关闭的功能,还可以支撑和固定柜门,提供安全和便利的使用环境。
根据不同的需求和使用场景,柜门铰链有多种种类与用法。
1. 弹簧铰链:弹簧铰链具有自动回弹功能,适用于需要频繁开关的柜门,如家
具柜门、抽屉柜门等。
它的结构比较简单,通常包括两个铰链杆和一个连接杆,柜门可以自动关闭,省去了手动关门的麻烦。
2. 球型铰链:球型铰链采用球形结构设计,可以使柜门在各个方向上自由旋转,适用于要求大开启角度的柜门,如展示柜、家居储物柜等。
它的特点是开启平稳,不易断裂,能够提供较好的使用体验。
3. 压力杆铰链:压力杆铰链适用于较大、较重的柜门,如冰箱门、淋浴房门等。
它通过调节压力杆的松紧程度,可以控制柜门的开启角度,保持柜门在任何位置都能够固定的特点。
4. 无槽铰链:无槽铰链适用于要求无缝连接的柜门,如酒柜、展示柜等。
它的
特点是安装简单,外观美观,不会破坏柜门的整体美观性。
5. 钻石型铰链:钻石型铰链适用于需要较高安全性的柜门,如保险柜、金库门等。
它采用特殊的结构设计,能够防止铰链被撬动、翘起或破坏,提供更好的安全保护。
总结而言,不同类型的柜门铰链适用于不同的柜门需求。
根据柜门的材质、尺寸、使用频率及安全性要求,选择合适的铰链种类与用法是确保柜门正常运行和延长使用寿命的重要因素。
间歇运动机构讲解
第六章间歇运动机构一、教学目的和教学要求1、教学目的:拓宽学生的知识面,使学生知道存在某一类机构。
2、教学要求结合专业需要对棘轮机构、槽轮机构、凸轮式间歇运动机构、不完全齿轮机构、星轮机构等一些其他常用机构的工作原理、运动特点及其应用有所了解。
二、本章重点教学内容及教学难点重点:了解棘轮机构、槽轮机构、不完全齿轮机构的组成、运动特点及其运动设计的要点。
至于凸轮式间歇机构和星轮机构,只需了解它们的运动特点。
难点:如何组织教学内容,使学生没有杂乱无章之感。
§6-1 棘轮机构一、棘轮机构的组成、工作特点及类型棘轮机构的典型结构是由摇杆、棘爪、棘轮、止动爪和机架组成。
可将主动摇杆连续往复摆动变换为从动棘轮的单向间歇转动。
其棘轮轴的动程可以在较大范围内调节,且具有结构简单、加工方便、运动可靠等特点。
但冲击、噪音大,且运动精度低。
棘轮上的齿大多做在棘轮的外缘上,构成外接棘轮机构,也有做在圆筒内缘上的,这时构成内接棘轮机构。
至于其他形式的齿式棘轮机构和摩擦式棘轮机构仅作为了解,以开阔眼界。
二、棘轮机构的设计要点在设计棘轮机构时,首要的问题是确定棘轮轮齿的倾斜角,因为为了保证棘轮机构工作的可靠性,在工作行程时,棘轮应能顺利地滑入棘轮齿底。
棘轮齿面倾斜角δ的确定:棘轮齿面倾斜角δ为齿面与轮齿尖向径的夹角。
为了使棘爪能顺利地进入棘轮齿间,则要求齿面总作用力R 对棘爪轴心的力矩方向应迫使棘爪进入棘轮齿底。
即应满足条件:ϕδ>(6-1) 其中ϕ为摩擦角。
§6-2 槽轮机构一、槽轮机构的组成、工作特点及类型槽轮机构的典型机构是由由主动拨盘、从动槽轮及机架组成。
可将主动拨盘的连续转动变换为槽轮的间歇转动。
并具有结构简单、尺寸小、机械效率高、能较平稳地间歇转位等特点。
普通槽轮机构有外槽轮机构和内槽轮机构之分。
为了满足某些特殊的工作要求,在某些机械中还用到一些特殊型式的槽轮机构,如不等臂长的多销槽轮机构、球面槽轮机构、偏置槽轮机构等。
万向铰链

Components for parallel kinematicsSeries GLK, GLAEJoints and struts form the core components of machinesparallel kinematics (PKM). Irrespective of the controltechnology possibilities, good mechanical characteristicsremain indispensable. These essentially determine theachievable rigidity and accuracy. INA PKM components wereorder to fulfil the requirements of the variousFor the flexible linkage of the struts to the machine frameworkand the platform, INA offers cardanic joints with two or threedegrees of freedom and ball joints whose design is matched tothe area of application; for machine tools, these are high rigidityand documented accuracy, while for handling equipment largeswivel angles and low mass are the primary requirements.The telescopic struts are now available as catalogue items intwo proven series with stroke length scales. Depending onapplication, either ball screw drives or planetary rollerscrews with various pitch values can be used.In short: the range offers improved cost-effectiveness forprecision movements through standardised sizes withnumerous degrees of freedom. Naturally, individual customersolutions can also be designed as before.541731 Market Information MAI 66Componentsfor parallel kinematicsBall jointswith three degrees of freedomCardanic jointswith two or three degrees of freedomGLK 2Telescopic struts34Basic load ratingsfor ball and cardanic jointsMaximum load carrying capacityThe maximum load carrying capacity P max of ball joints is shown in Figure 1.It depends on:I the size of the jointI the direction of the load (tensile/compressive load).Basic static load ratings for cardanic jointsThe basic static load ratings C 0 are shown in Figure 2.They depend on:I the type of joint I the swivel angle .The basic static load rating C 0 is only influenced by the swivel angle . The swivel angles ␣ and ␥ have no influence on the basic static load rating.Static load safety factorThe static load safety factor S 0 must be м 4! For other static load safety factors, INA must be consulted!max0the swivel angle Bearingsfor cardanic support56T elescopic strutsSeries GLAE1)Dependent on the adjacent construction. To be defined by the customer.2)Dependent on the joint type.3)Other sizes may be available by agreement.Dimension table · Dimensions in mm DesignationDiameter of sliding tube 3)Dimensions D 1D 2D 3D 4d 3 M A L min L 1L 2L 3Stroke length Spindle diameterл–0,015h8GLAE F-232220707013090120301)56ϫ22)941501)851)–6004011418001241950GLAE F-2364378080170130130451)56ϫ22)1380501)981)563900507Swivelling rotary/ Array cardanic jointswith two degrees of freedom Series GLK 2with three degrees of freedomSeries GLK 389Ball jointwith three degrees of freedom Series GLK1011Application example PKM machining centre107 466INA-Schaeffler KG91072 Herzogenaurach · Germany Internet E-Mail info@ In Germany:Telephone 0180/5003872Fax 0180/5003873From other countries:Telephone +49/9132/82-0Fax +49/9132/82-4950S ach -N r.005-299-462/M A I 66 G B -D 12021 · P r i n t e d i n G e r m a n y。
常用自动化机构
( l A+l B ) 2
5.凸轮式间歇运动机构
主动凸轮轮连续转动 从动轮间歇转动
凸轮间歇运动机构
蜗杆凸轮式间歇运动机构
6.不完全齿轮机构
主动轮连续转动 从动轮间歇转动
外啮合不完全齿轮机构
不完全齿轮齿条机构
7.组合机构
几种基本机构组和应用 满足工作要求
齿轮 — 连杆组合机构
组合机构
由上式可见: k 0
z 3 且k 0.5
槽轮的运动时间总是小于其静止时间 若欲使 k ≥0.5 ,可多装几个圆销,设均匀布置 n 个圆销, k是单销的n倍
k n(1 / 2 1 / z)
又 k 1 n 2 z /( z 2)
四 、普通槽轮机构的设计要点
1、槽数 z 和圆销数 n 的选取 运动系数 k: k t d / t
常用自动化机构
1 棘轮机构
2 槽轮机构
3 万向铰链机构 4 螺旋机构 5 不完全齿轮机构 6 凸轮式间歇运动机构
1 棘轮机构
一、棘轮机构的组成及工作特点
1、组成: 棘轮、摇杆、棘爪、止动棘 爪 2、工作特点 将主动摇杆的往复摆动转 摇杆 棘爪 棘轮
换为棘轮的单向间歇运动
结构简单、制造方便,运 动可靠,转角可调; 冲击、噪声大,精度低
2、按啮合方式分类
外啮合方式 内啮合方式
3、按运动形式分类
从动件单向间歇转动 从动件单向间歇移动
4、按棘轮转向(可能) 单向式棘轮机构 双向式棘轮机构
5、按棘爪数目分类 单动式棘轮机构 双(三)动式棘轮机构
三 、棘轮机构的功能
1、间歇送进
三 、棘轮机构的功能
2、制动
三 、棘轮机构的功能
JCC万向接头 JCC万向节 JCC十字万向接头 JCC十字万向节
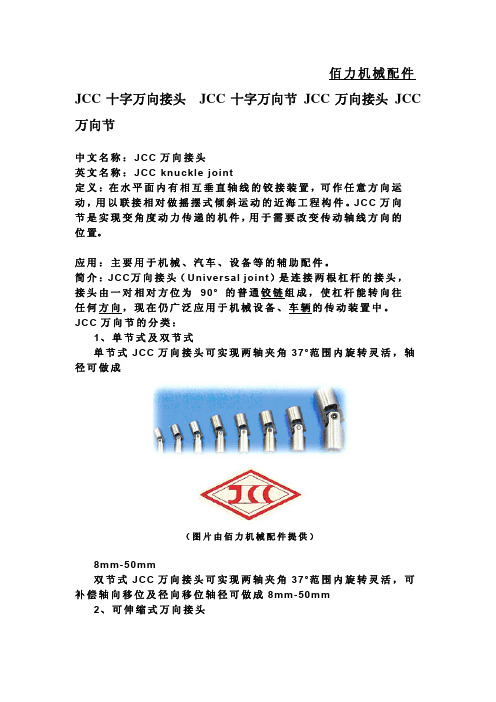
佰力机械配件JCC十字万向接头 JCC十字万向节 JCC万向接头 JCC 万向节中文名称:JCC万向接头英文名称:JCC knuckle joint定义:在水平面内有相互垂直轴线的铰接装置,可作任意方向运动,用以联接相对做摇摆式倾斜运动的近海工程构件。
JCC万向节是实现变角度动力传递的机件,用于需要改变传动轴线方向的位置。
应用:主要用于机械、汽车、设备等的辅助配件。
简介:JCC万向接头(Universal joint)是连接两根杠杆的接头,接头由一对相对方位为 90° 的普通铰链组成,使杠杆能转向往任何方向,现在仍广泛应用于机械设备、车辆的传动装置中。
JCC万向节的分类:1、单节式及双节式单节式JCC万向接头可实现两轴夹角37°范围内旋转灵活,轴径可做成(图片由佰力机械配件提供)8mm-50mm双节式JCC万向接头可实现两轴夹角37°范围内旋转灵活,可补偿轴向移位及径向移位轴径可做成8mm-50mm2、可伸缩式万向接头可伸缩式除拥有单节JCC万向接头和双节JCC万向接头的使用性能,可实现两轴夹角37°范围内旋转灵活,可补偿轴向移位及径向移位外,因中间带伸缩是花键设计,可实现轴向0-1000mm的移位,方便于安装,轴径可做成8mm-50mm,安装长度150-4000mm,公称扭矩可达到2000N,M。
3、带弹簧式整平机JCC万向接头带弹簧式整平机JCC万向接头,采用42CrMo合金钢材料自作,可实现更大的传动扭矩,加装弹簧可实现自动伸缩,多用于整平机,横切机,分条机加工设备,纵剪线(纵剪机)横剪线(横剪机)专用。
历史:主要概念来至于陀螺仪,由于第一个万向接头由罗伯特·胡克制造,因此又称做胡克接头(虽然意大利数学家卡尔达诺早一世纪前就提出了万向接头的想法,但是没有制造出来),在1545年,虽然目前还不清楚他是否产生了工作模式。
Christopher Polhem后来发布它,它被称为“Polhem knot”。
中间轴两端叉面夹角对万向铰链机构传动比影响的分析

角为ϕ1 时,中间轴转角为ϕ 2 。
e1(ϕ1)=cosϕ i1 1−sinϕ1 j1 ; e2(ϕ 2)=cosϕ 2i2+sinϕ 2 j2
由图可以知: i2=cosβ 1 j1−sinβ k1 1 ;且 i1= j2
-1-
故: e2(ϕ 2)=cosϕ 2cosβ 1 j1−cosϕ 2sinβ k1 1+sinϕ i2 1
夹角介于 0º、90º之间时,传动比变化。
同理分析右侧单万向铰链机构,得传动比:
i 34
=
ω ω
3 4
=
1−
cosβ 2 sin 2ϕ 4sin
2
β
2
(3)
i12
i34
40°
30°
20°
10°
10°
20°
30°
40°
ϕ1
ϕ4
图 2 传动比 i12 , i34 变化曲线
利用 Matlab 软件绘出轴夹角 β 1,β 2= 10°、20°、30°、40°时,传动比 i12 , i34 的变化
应用双万向铰链机构时,应尽可能减小中间轴两端叉面夹角以降低机械的速度波动,提
高运动精度和工作可靠性。工程设计人员可利用本文传动比及传动比误差的计算公式、误差
分析的方法和结论,进行定量计算分析,确定能较好满足机械使用要求的允许速比变化范围,
进而可设定中间轴两端叉面夹角等约束条件,以指导制造、装配及调试等工程实践。
i2
j1
β1
j1
ϕ1
O1
i1
e1(ϕ1)
i2 ϕ
e2(ϕ
2
)
e3(ϕ
)
3
i3 ϕ
2
第二章 膨胀节的结构及功能
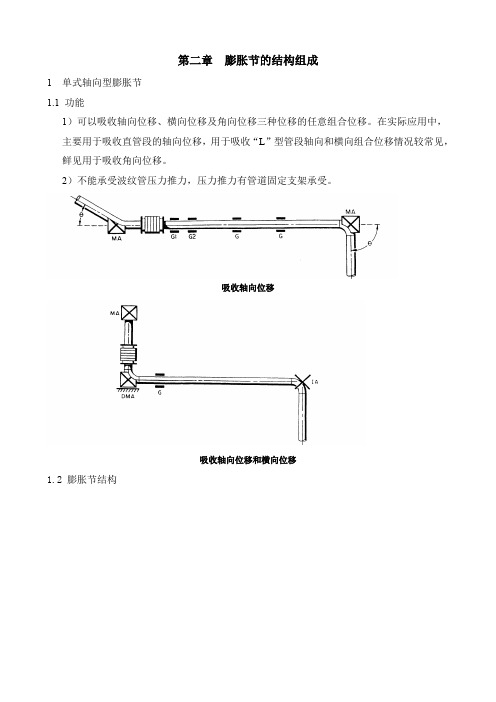
第二章膨胀节的结构组成1 单式轴向型膨胀节1.1 功能1)可以吸收轴向位移、横向位移及角向位移三种位移的任意组合位移。
在实际应用中,主要用于吸收直管段的轴向位移,用于吸收“L”型管段轴向和横向组合位移情况较常见,鲜见用于吸收角向位移。
2)不能承受波纹管压力推力,压力推力有管道固定支架承受。
吸收轴向位移吸收轴向位移和横向位移1.2 膨胀节结构1——波纹管 2、3——接管 4——垫环 5——内衬筒(导流筒) 6——耳板 7——双头螺柱 8——螺母1)波纹管:核心元件、变形元件2)接管:用于波纹管与管道之间的连接。
3)内衬筒:保护性构件,使介质流动平稳;保护波纹管,避免介质冲涮。
4)垫环:内衬筒的附属件,用于直内衬筒(不翻边)与接管之间连接。
5)双头螺柱:运输固定构件,用于固定波纹管的长度,避免运输、安装过程中膨胀节变形。
耳板:运输固定构件,用于支撑双头螺柱。
6)螺母:运输固定构件,用于固定双头螺柱。
图略。
2复式自由型膨胀节2.1 功能1)可以吸收轴向位移、横向位移及角向位移三种位移的组合位移。
在实际应用中,主要用于用于吸收轴向和横向组合位移。
如“L”形管段的位移(见单式);与管道相连的设备位移(横向)和管道热胀位移(轴向)。
2)不能承受波纹管压力推力,压力推力有管道固定支架承受。
2.2 膨胀节结构1——波纹管 2——接管 3——中间接管 4——垫环 5——内衬筒(导流筒) 6——耳板 7——双头螺柱8——螺母1)波纹管、接管、内衬筒(导流筒)、耳板、双头螺柱见单式轴向膨胀节。
2)中间接管,用于波纹管之间的连接。
3 复式拉杆型型膨胀节3.1 功能1)用于吸收横向位移和中间接管的轴向位移。
在实际应用中,“L”、“Z”形管段上常采用复式拉杆型型膨胀节吸收管段位移。
2)波纹管压力推力由承力构件承受。
3.2 膨胀节结构1——接管撑板组件 3——波纹管 4——中间接管 5——耳板 6——双头螺柱(大拉杆) 7——双头螺柱8——肋板 11——垫环 13——内衬筒(导流筒) 15——螺母 16——锥面垫圈 17——球面螺母18——螺母1)接管撑板组件(承力构件):接管作用略;撑板用于支撑大拉杆,并传递盲板力。