ARM中断基础知识
arm中断处理过程
Arm的中断处理流程1:芯片输入管脚,按照中断的配置发生变化,(比如产生上升沿),arm芯片内部就会检测到中断。
2:ARM要求中断向量表必须放置在从0开始、连续8×4字节的空间内。
所以地址空间“0x00000000-0x00000032”就是所谓的中断向量表。
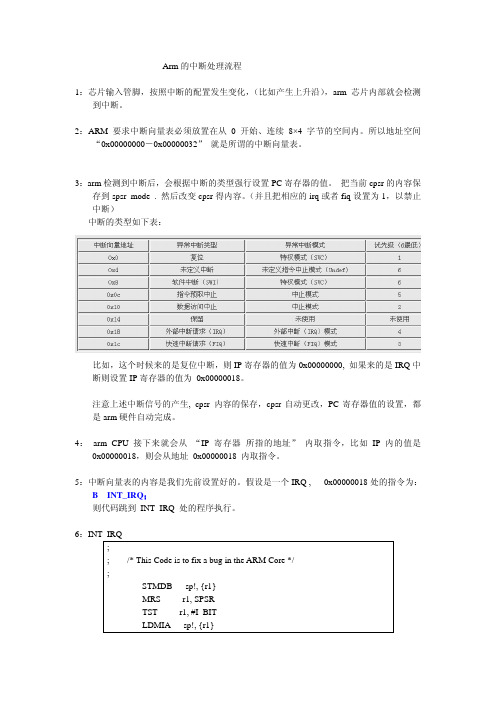
3:arm检测到中断后,会根据中断的类型强行设置PC寄存器的值。
把当前cpsr的内容保存到spsr_mode . 然后改变cpsr得内容。
(并且把相应的irq或者fiq设置为1,以禁止中断)中断的类型如下表:比如,这个时候来的是复位中断,则IP寄存器的值为0x00000000, 如果来的是IRQ中断则设置IP寄存器的值为 0x00000018。
注意上述中断信号的产生, cpsr 内容的保存,cpsr自动更改,PC寄存器值的设置,都是arm硬件自动完成。
4: arm CPU接下来就会从“IP寄存器所指的地址”内取指令,比如IP内的值是0x00000018,则会从地址 0x00000018 内取指令。
5:中断向量表的内容是我们先前设置好的。
假设是一个IRQ , 0x00000018处的指令为:B INT_IRQ;则代码跳到 INT_IRQ 处的程序执行。
6:INT_IRQ;; /* This Code is to fix a bug in the ARM Core */;STMDB sp!, {r1}MRS r1, SPSRTST r1, #I_BITLDMIA sp!, {r1}SUBNES pc,lr,#4; //保存环境; /* End ARM Core Fix */STMDB sp!, {a1 - v7, fp, ip, lr} ; Save context…… //里面会进行某些状态位判断,以确定具体是哪个中断,然后调用相应处理程序//恢复环境INT_IRQ_EXITLDMIA sp!, {a1 - v7, fp, ip, lr} ; Restore contextSUBS pc, lr, #4 ; Return to interrupted codeEND ; end file7:What happens if an interrupt occurs as it is being disabled?Applies to:If an interrupt is received by the core during execution of an instruction that disables interrupts, the ARM7 family will still take the interrupt. This occurs for both IRQ and FIQ interrupts.For example, consider the follow instruction sequence:MRS r0, cpsrORR r0, r0, #I_Bit:OR:F_Bit ;disable IRQ and FIQ interruptsMSR cpsr_c, r0If an IRQ interrupt is received during execution of the MSR instruction, then the behavior will be as follows:The IRQ interrupt is latchedThe MSR cpsr, r0 executes to completion setting both the I bit and the F bit in the CPSRThe IRQ interrupt is taken because the core was committed to taking the interrupt exception before the I bit was set in the CPSR. The CPSR (with the I bit and F bit set) is moved to the SPSR_irq上面是arm的一个bug。
ARM7(sc44b0)外部中断笔记

ARM7(sc44b0)外部中断笔记对于sc44b0它也是一种单片机,一种比较高级的单片机而已,所以他也跟51单片机一样有外部中断,不同51单片机的是,他有8个外部中断源,对应的是8个管脚,(51只有两个,int0和int1,P3.3和P3.4),分别是Port G八个管脚。
而对于外部中断4 \5\6\7很多都是共用寄存器,他们是通过或逻辑公用一个中断请求线。
下面就具体来说说使用外部中断的一些必要的配置。
一,对管脚的配置,因为Port G有三种功能用法,要通过对rPCONG(端口G配置寄存器)的配置来选用Port G的外部中断的功能。
其配置表如下所以应该将其配置为11(设置为中断功能状态);二,中断模式的选择,中断模式有两种,FIQ(快速中断模式)和 IRQ(中断模式)两种,一般没有特殊要求都用IRQ模式即可。
可以通过对中断模式寄存器rINTMOD配置获得。
如表下三,是否允许中断,即中断使能位。
通过对中断控制寄存器INTCON的配置即可,如表下通过对中断控制寄存器的配置即可,可以看出只要让intcon的【1】位置零即可使中断使能。
四,外部中断方式的选择,低电平或上升沿触发呢,还是别的,这就要对外部中断方式寄存器(EXTINT)的配置,其表如下由上表可知,如果要用下降沿触发,就可将EXTINT 的值给0x22222222;将所有的外部中断都设置为下降沿触发。
五,当中断捕抓到以后,要引起什么变化呢?或者说用什么来捕抓呢?在sc44b0中用了两个寄存器来捕抓,一个中断挂起寄存器(INTPND),和外部中断挂起寄存器(EXINTPND),一开始不明白挂起是什么意思,后来才懂,差不多就相当与51单片机的标志位一样,当中断发生后,就将挂起寄存器的对应的某一位置一或置零,外部中断挂起寄存器如表下中断挂起寄存器:当中断产生后,是将INTPND的【21】位置一的;所以,判断有无外部中断,就可以通过读取挂起寄存器对应的为,即可知道是否有无中断。
arm中断嵌套的原理

arm中断嵌套的原理摘要:1.引言2.arm 中断嵌套的原理2.1 arm 的中断向量表2.2 中断嵌套的实现2.3 中断嵌套的优点和应用3.arm 中断嵌套的实现3.1 硬件方面的支持3.2 软件方面的支持4.arm 中断嵌套的注意事项4.1 中断处理时间的考虑4.2 中断优先级的处理5.总结正文:在嵌入式系统中,中断处理是一个常见的功能。
ARM 处理器提供了丰富的中断处理功能,使得开发者可以灵活地处理各种中断事件。
中断嵌套是ARM 中断处理的一个重要特性,可以提高系统的响应速度和处理效率。
本文将详细介绍ARM 中断嵌套的原理、实现以及注意事项。
首先,我们需要了解ARM 中断嵌套的原理。
ARM 的中断向量表是一个关键概念。
中断向量表是一个存储中断向量地址的数组,用于快速定位和处理各种中断事件。
当有中断请求时,处理器会根据中断类型号在中断向量表中查找对应的中断向量地址,然后跳转到该地址执行中断处理程序。
中断嵌套的实现主要依赖于中断向量表的布局和中断处理程序的设计。
在一个系统中,可能会有多个中断源,它们的中断向量地址可能会相互重叠。
为了实现中断嵌套,我们需要保证中断向量表中的下一个中断向量地址在当前中断处理程序执行完毕之前可以被访问到。
这样,当一个中断请求到来时,处理器可以在当前中断处理程序执行完毕后,快速跳转到下一个中断向量地址,执行下一个中断处理程序。
中断嵌套的优点主要体现在可以提高系统的响应速度和处理效率。
例如,当一个外部中断请求到来时,处理器可以在执行当前中断处理程序的同时,响应外部中断请求,这样可以减少中断处理的时间。
此外,中断嵌套还可以实现中断优先级的功能,使得高优先级的中断请求能够更快地被处理。
要实现ARM 中断嵌套,需要硬件和软件两方面的支持。
在硬件方面,处理器需要支持中断嵌套,这通常需要处理器具有中断控制器,可以实现中断请求的排队和嵌套处理。
在软件方面,需要编写适当的中断处理程序,确保在当前中断处理程序执行完毕之前可以跳转到下一个中断向量地址。
ARM体系中异常中断种类及处理办法
ARM 体系中异常中断种类及处理办法在ARM 体系中,通常有以下3 种方式控制程序的执行流程:
•在正常程序执行过程中,每执行一条ARM 指令,程序计数器寄存器(PC)的值加4 个字节;每执行一条Thumb 指令,程序计数器寄存器(PC)的值加2 个字节。
整个过程是顺序执行。
•通过跳转指令,程序可以跳转到特定的地址标号处执行,或者跳转到特定的子程序处执行。
其中,B 指令用于执行跳转操作;BL 指令在执行跳转操作的同时,保存子程序的返回地址;BX 指令在执行跳转操作的同时,根据目标地址的最低位可以将程序状态切换到Thumb 状态;BLX 指令执行3 个操作:跳转到目标地址处执行,保存了子程序的返回地址,根据目标地址的最低位可以将程序状态切换到Thumb 状态。
•当异常中断发生时,系统执行完当前指令后,将跳转到相应的异常中断处理程序处执行。
在当异常中断处理程序执行完成后,程序返回到发生中断的指令的下一条指令处执行。
在进入异常中断处理程序时,要保存被中断的程序的执行现场,在从异常中断处理程序退出时,要恢复被中断的程序的执行现场。
学习小结--ARM7中断原理
2
3 向量地址寄存器 0-15(VICVectAddr0-15 - 0xFFFFF100-13C,读/写)
一般(以 Slot0 为例):VICVectAddr0 = (uint32)IRQ_TIME0 ;
4 向量地址寄存器(VICVectAddr - 0xFFFFF030,读/写) VICVectAddr = 0x00; // 通知 VIC 中断处理结束
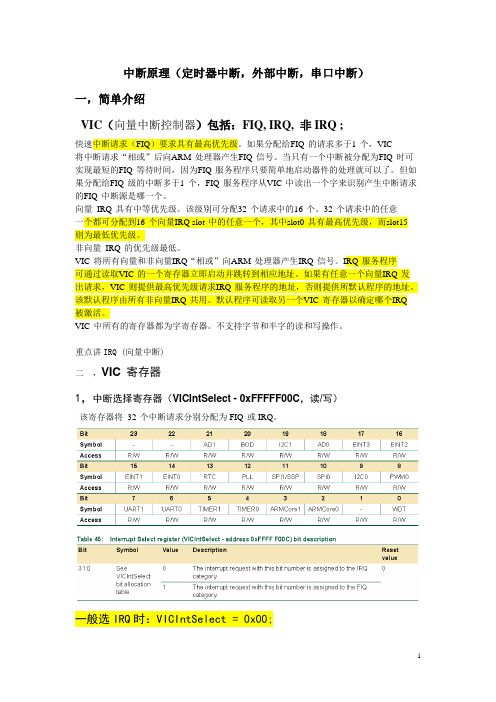
二 ,VIC 寄存器 1,中断选择寄存器(VICIntSelect - 0xFFFFF00C,读/写)
该寄存器将 32 个中断请求分别分配为 FIQ 或 IRQ。
一般选 IRQ 时:VICIntSelect = 0x00;
1
2,向量控制寄存器 0-15(VICVectCnt l0-15 - 0xFFFFF200-23C,读/写)
PINSEL0 = 0x00000000; // 设置管脚连接 GPIO IO1DIR = LED1|LED2; // 设置 I/O 为输出 IO1SET = LED1|LED2; Time1Init(); // 初始化定时器及使能中断 Time0Init(); VICIntSelect = 0x00; // 所有中断通道设置为 IRQ 中断 VICDefVectAddr = (uint32)nIRQ_TIME; VICIntEnable = time0|time1; while(1); // 等待定时器中断或定时器匹配输出 return(0); }
}
} /**************************************************************************** * 名 称:Time0Init() * 功 能:初始化定时器,定时时间为 S,并使能中断。 * 入口参数:无 * 出口参数:无 ****************************************************************************/ void Time1Init(void) {
arm中断嵌套的原理
arm中断嵌套的原理【实用版】目录1.ARM 中断嵌套的原理概述2.中断嵌套的实现机制3.中断嵌套的优缺点分析4.总结正文【1.ARM 中断嵌套的原理概述】ARM(Advanced RISC Machine)是一种高级精简指令集计算机(RISC)架构,广泛应用于嵌入式系统和移动设备等领域。
在 ARM 系统中,中断嵌套是一种重要的技术,用于实现多个中断之间的协同处理。
当一个中断处理程序(Interrupt Handler,IH)在执行过程中,可能会触发另一个中断处理程序,这就形成了中断嵌套。
【2.中断嵌套的实现机制】中断嵌套的实现主要依赖于 ARM 处理器的中断处理机制。
具体来说,当一个中断发生时,处理器会立即保存当前程序的状态,包括程序计数器、寄存器等,然后跳转到对应的中断处理程序入口。
在这个过程中,处理器会启用中断优先级控制,根据中断优先级确定处理程序的执行顺序。
在执行中断处理程序时,如果遇到另一个更高优先级的中断,处理器会再次保存当前程序的状态,并跳转到新的中断处理程序入口。
这样就形成了嵌套的层次结构。
在嵌套的过程中,处理器会按照优先级顺序逐个处理中断,直到所有中断处理完毕,恢复执行最初被中断的程序。
【3.中断嵌套的优缺点分析】中断嵌套技术具有以下优点:1.提高系统响应速度:当外部事件发生时,系统可以快速响应并进行处理,提高系统的实时性能。
2.资源利用率高:中断嵌套允许多个中断处理程序并发执行,充分利用系统资源。
然而,中断嵌套也存在以下缺点:1.代码复杂度增加:由于中断嵌套导致程序流程分支较多,可能会增加代码的复杂度,影响程序的可维护性。
2.系统稳定性降低:中断嵌套可能导致系统在处理多个中断时出现死锁、竞态等问题,影响系统的稳定性。
【4.总结】总之,ARM 中断嵌套技术在提高系统响应速度和资源利用率方面具有显著优势,但同时也带来了代码复杂度和系统稳定性方面的挑战。
ARM中断处理及状态机嵌套实现
ARM中断处理及状态机嵌套实现1.ARM7 提供两种级别的中断, FIQ(Fast Interrupt Request 快中断) 一般中断低速反应中断IRQ。
所有的中断请求一旦产生则中断反应会经过三个步骤 a. 输入阶段这个逻辑可以根据中断源被实现,需要0-2 个时钟周期 b.EIC 自身处理2 个时钟周期 c.ARM7 的逻辑处理2.EIC Enhanced Interrupt Controller 增强型中断控制器EIC 硬件处理多路中断,中断优先运算和矢能。
a.32 路可屏蔽的中断, 映射到ARM 的CPU 中断请求总线 b.每路16 级可编程优先级映射IRQ c.硬件支持最大16 个中断嵌套 d.2 路可屏蔽的中断通过FIQ 中断请求总线 e.在0x18 处的寄存器装载的是最高优先及中断用户自定义的中断处理地址 f.16 个XTI块外部中断3.中断处理过程 1.检查相关中断的请求屏蔽位 2.比较所有中断请求的优先级,IRQ 当前中断是否优先级高于当前存储的中断。
3.自动装载EIC_SIRn[31:16]位用户自定义地址进入EIC_IVR[15:0]中 4.手动装载用户中断处理高16 位地址进入EIC_IVR[31:16] 5.当新产生一个中断则保存先前的中断优先级进入优先栈中。
6.当新的中断被接受则用新的优先级更新当前中断优先级寄存器EIC_ICR 中断控制寄存器31-2 保留1. FIQ_EN:RW 是FIQ 允许的标志位置1 开启置0 关闭0.IRQ_EN:RW 是IRQ 允许的标志位置1 开启置0 关闭EIC_CICR 中断频道控制寄存器31-5 保留4-0.CIC[4:0]:R 是当前中断的序号, 是第几号中断由中断请求发生时硬件写入EIC_CIPR 当前中断优先级寄存器31-4 保留3-0 CIP[3:0]:rw 是当前中断的优先级,在IRQ 总线上会自动探测进入的中断请求优先级和当前的优先级的高低。
ARM的异常和中断
指令预取中止 0x0000000c 数据访问中止 0x00000010 外部中断 快速中断 0x00000018 0x0000001c
ARM技术及应用
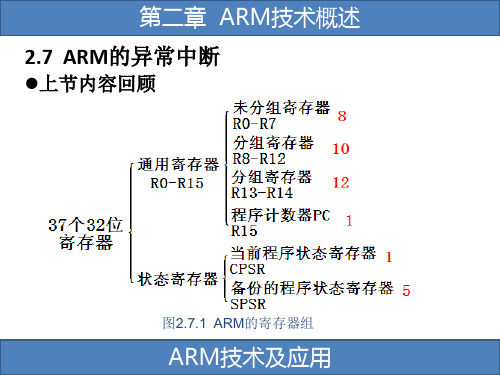
第二章 ARM技术概述
2.7.3 ARM的异常中断向量表 异常中断向量表的大小为32字节; 每个异常中断向量占4个字节,存放一个跳转指令 或向PC寄存器中赋值的数据访问指令; 异常中断响应时,程序计数器PC会指向相应的异常 中断向量,执行跳转指令跳转至相应的异常中断服务 程序中继续执行。
Uboot:免费开源的BootLoader,支持多种处理器 本例Uboot版本: 1.3.2 本例代码:/uboot-1.3.2/cpu/arm920t目录下的start.S ,是系统在Uboot引导下执行的第一段代 Uboot 码。
ARM技术及应用
第二章 ARM技术概述
代码片段分析:
.globl _start _start: b start_code ldr pc, _undefined_instruction ……………….. ldr pc, _irq ldr pc, _fiq _undefined_instruction: .word undefined_instruction ……………………….. __irq: .word irq _fiq: .word fiq
ARM技术及应用
第二章 ARM技术概述
2.7.4 ARM的异常中断响应过程
图2.7.3 异常中断响应过程
ARM技术及应用
第二章 ARM技术概述
2.7.5 ARM的异常中断的返回 复位异常处理程序执行完毕后,不用返回。
图2.7.4 异常中断的返回
ARM技术及应用
arm cortex-m中断处理流程
ARM Cortex—M处理器家族是一组为嵌入式系统制造的32位处理器。
这些处理器被用在很多诸如IOT设备,设备,汽车等等的东西中。
Cortex—M处理器的一个酷点是它们能处理中断,这意味着它们能对事件迅速作出反应。
在文章中,我们将讨论Cortex—M处理器如何
处理中断,我们将专注于所涉及的步骤和概念。
当一个Cortex—M处理器中断时,就像在电子游戏上按下暂停按钮。
处理器很快地将它所做的一切保存在堆栈上,类似于在游戏中保存你
的进度。
它记得它在哪里,它在做什么,和所有重要的环境。
是时候找出真正造成中断的原因了。
处理器检查其特殊的内存图称为
中断矢量表,这就像一个导致不同中断服务常规(ISR)的藏宝图。
这就像在游戏中寻找正确的路径来解决特定的挑战。
一旦处理器知道哪一个ISR去,就像跳进游戏的新关卡。
它开始执行
中断处理器代码,这就像用一套新的指令处理一个新的任务。
就像在
游戏中,处理器可以永远回到它留下的地方,继续冒险!
在ARM Cortex—M的微妙舞蹈中,中断处理是一种优雅的芭蕾舞,
它拯救了现在的时刻,从迷人的矢量台上寻找ISR的悄悄位置区域,
并跳入ISR的等待怀里,执行中断处理者的卡住密码。
这种受试过程
使处理器能够以优雅和高效的空气来响应外部事件的呼唤,将Cortex—M处理器铸成实时嵌入系统的发光星。
ARM异常中断以及对ARM异常返回地址的分析
返回地址:SUBS PC,R14,#8 返回地址分析: 当进入异常时,R14_abt = address of the aborted instruction + 8
所以要返回到有问题的指令处重新执行,所以返回的地址为 R14-8 IRQ 中断异常:
产生原因: 当处理器的外部中断请求引脚有效,且 CPSR 寄存器的 I 控制位被清除 时,处理器产生外部中断 IRQ 异常。
是因为当前指令即引起软件异常中断的指令执行后所引起的,说明当前指令已近执行,当从
中断返回时,执行的指令应该是当前指令的下一条指令,即待执行指令的地址应该是 0x3004, 而 R14 中存放的即为 0x3004,所以返回时使用将 R14 的值直接赋给 PC 即可。
指令预期中止异常: 发生原因:若在指令预取阶段遇到无效指令时,系统存储器将该预取的指令标记为无
效指令,当处理器试图去执行这一条被标记为预取无效的指令时,将产生指令预取中止异常, 注意若处理器没有执行无效指令时将不会产生异常中断(在流水线中存在一条分支指令,导 致该非法指令没有执行,将不会产生该异常)。
处理器动作: R14_abt = address of the aborted instruction + 4 SPSR_abt = CPSR ….. …..
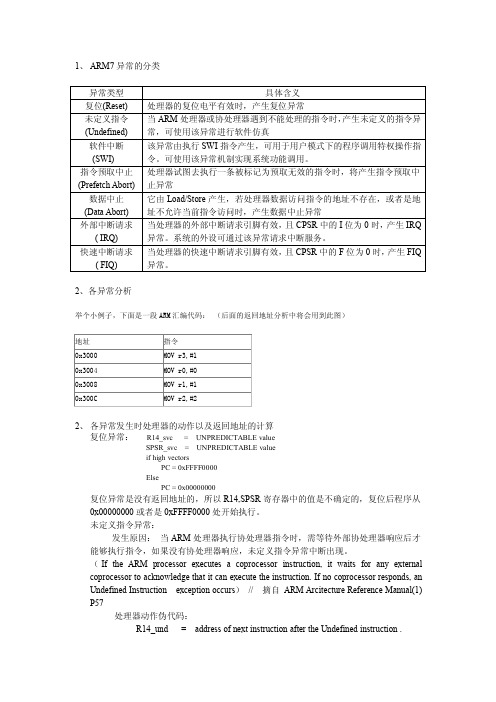
2、各异常分析
举个小例子,下面是一段 ARM 汇编代码: (后面的返回地址分析中将会用到此图)
ARM处理器中断处理的编程实现

ARM处理器中断处理的编程实现中断是指外部事件打断正在执行的程序,并暂时转去执行与该事件有关的处理程序。
在ARM处理器上,中断处理是通过中断向量表和中断服务程序来实现的。
下面是ARM处理器中断处理的编程实现的主要内容。
1.中断向量表的设置在ARM处理器中,中断向量表是一个保存中断服务程序地址的表。
每个中断号对应一个中断服务程序的地址,当发生中断时,处理器会跳转到相应中断号对应的中断服务程序。
中断向量表必须存储在内存中,并且要先设置好才能使得中断处理正常工作。
为了设置中断向量表,需要将每个中断号对应的中断服务程序的地址写入到相应的中断向量表项中。
具体的实现方式根据不同的ARM架构有所不同。
以ARM Cortex-M系列处理器为例,中断向量表的每个向量表项占用4个字节,存储中断服务程序的地址。
下面是使用C语言设置中断向量表的示例代码:```c//声明中断向量表typedef void (*interrupt_handler_t)(void);//中断服务程序声明void interrupt_handler1(void);void interrupt_handler2(void);...//中断向量表__attribute__ ((section(".isr_vector")))const interrupt_handler_t interrupt_vector_table[] =interrupt_handler1, // 中断号0对应的中断服务程序interrupt_handler2, // 中断号1对应的中断服务程序...```2.中断服务程序的编写中断服务程序负责处理中断的具体逻辑。
当中断发生时,处理器会跳转到对应中断号的中断服务程序进行处理。
中断服务程序必须具有固定的格式和规范,以确保在中断发生时能正常执行。
中断服务程序的编写一般包括以下几个步骤:-保存寄存器状态:由于中断服务程序会暂时打断正在执行的程序,需要在进入中断服务程序时保存当前的寄存器状态,以便中断处理完成后能够正确恢复现场。
arm处理器异常中断响应过程
arm处理器异常中断响应过程ARM处理器是一种广泛应用于移动设备、嵌入式系统和服务器等领域的处理器架构。
在运行过程中,处理器可能会遇到各种异常情况,如访问非法内存、除零错误等。
当这些异常发生时,ARM处理器需要做出相应的中断响应,以保证系统的稳定性和安全性。
ARM处理器异常中断响应的过程可以分为异常触发、异常处理和恢复执行三个阶段。
首先是异常触发阶段。
当处理器在执行指令时,发生了某种异常情况,例如访问了非法的内存地址,处理器会立即检测到异常,并将当前指令的状态保存起来。
同时,处理器会根据异常类型,确定异常向量的地址,将控制转移到异常向量所指向的地址处。
接下来是异常处理阶段。
当处理器进入异常向量所指向的地址时,会执行相应的异常处理程序。
这个程序通常是由操作系统或应用程序提供的,用于处理不同类型的异常。
在异常处理程序中,可以进行一系列的操作,例如保存现场、记录异常信息、处理异常原因等。
处理程序还可以根据需要选择继续执行或终止当前指令。
最后是恢复执行阶段。
在异常处理程序执行完毕后,处理器会根据异常返回地址,将控制权返回到引发异常的指令处,继续执行后续指令。
在返回之前,处理器可能会进行一些必要的恢复操作,如恢复现场、清除异常状态等。
这样,系统就可以继续正常运行,不受异常的影响。
需要注意的是,ARM处理器还提供了一些特殊的异常处理方式,如中断(Interrupt)和陷阱(Trap)。
中断是外部设备触发的异常,用于异步事件的处理,例如外部设备的输入输出请求。
陷阱是由程序主动触发的异常,用于实现系统调用和调试功能。
这些异常的触发和处理方式与一般异常略有不同,但整体的处理过程仍然符合前述的异常中断响应流程。
在ARM处理器中,异常中断响应是保证系统正常运行和异常处理的关键环节。
通过合理的异常处理程序和恢复机制,可以有效地应对各种异常情况,提高系统的可靠性和稳定性。
同时,开发人员也需要根据具体应用场景和需求,灵活地配置和调整异常处理方式,以满足不同的需求。
arm IRQ中断之向量中断非向量中断

arm中断向量表中,只有一个IRQ向量地址,占4字节(另外还有一个FIQ向量地址),可是arm支持多个外部中断源,一个中断发生后,arm如何根据这一个向量地址找到相应的中断服务程序?这里要区分中断是向量中断还是非向量中断。
一个中断源对应一个中断号,对于不同的外部中断源根据处理方式不同分为向量中断和非向量中断。
向量中断:当中断为向量中断时,arm直接跳转到预先提供的中断服务程序执行,这种处理方式响应速度快。
非向量中断:当中断为非向量中断时,无论是什么外部中断源发出的中断,arm将跳到指定的一段程序执行(称为中断解析程序),在解析程序里,通过判断相应的中断状态寄存器找到对应的中断源,跳转到相应的中断执行程序。
有点类似软件中断的处理方式,但是软中断(SWI)与非向量中断不同,它的入口是0x0000,0008。
进入软中断后,系统变为管理模式。
而非向量中断入口是0x0000,0018。
它引导系统进入fiq/irq模式。
这种处理方式简单,但是要通过软件查询来判断具体的中断服务程序,所有延迟时间较长。
如何设置:系统在初始化的时候需要进行中断初始化,设置中断源是向量中断还是非向量中断。
设置方式举例如下:VICIntSelect = 0x00000000; //所有中断都是IRQVICVectCntl0 = 0x20 | 15; //将15号中断EINT1设置为向量中断,并且使用优先级0 VICVectAddr0 = (uint32)EINT1_Exception; //EINT1中断服务程序地址VICDefVectAddr = (uint32)Default_Entry; //其他的非向量中断默认的处理地址,其他非向量中断都会进入Default_Entry进行处理,在Default_Entry中获得具体的中断号再进行具体处理VICIntEnable = 0x00018000; //使能EINT1和EINT2由于在管理向量中断的VICVectCntl0~15和VICVectAddr0~15中只设置了EINT1,故EINT2中断发生时,要进入非向量中断处理程序Default_Entry。
ARM中断程序的原理和实现
ARM中断程序的原理和实现中断是计算机系统中的一种强制性事件,它能够暂停正在执行的程序,并立即转移到一个特殊的处理程序上去执行。
ARM架构的处理器也支持中断机制,为了正确处理中断,ARM定义了一套中断处理的规范和流程。
本文将介绍ARM中断的原理和实现。
一、ARM中断的原理1. 中断请求(Interrupt Request, IRQ):外部设备或其它条件触发的一种中断请求信号,用于向处理器报告需要进行中断处理的事件。
2. 中断服务例程(Interrupt Service Routine,ISR):是一段特殊的程序代码,用于处理中断事件。
当中断被触发后,处理器会跳转到对应的中断服务例程中执行,完成相应的中断处理逻辑。
3. 中断控制器(Interrupt Controller):负责接收处理器的中断请求,并将其派发给对应的中断服务例程。
1.外设或其它条件触发中断请求,发送中断信号给中断控制器。
2.中断控制器接收到中断请求后,对中断请求进行优先级判断,确定哪个中断请求最先被处理。
3.中断控制器将中断请求发送给处理器,并将处理器的执行流转移到中断服务例程上。
4.处理器执行中断服务例程,处理相应的中断事件。
5.中断服务例程执行完毕后,处理器返回到中断发生前的状态,继续执行原程序。
二、ARM中断的实现1.配置中断控制器ARM架构提供了多种中断控制器,如VIC(Vectored Interrupt Controller)和GIC(Generic Interrupt Controller)等。
具体的中断控制器的选择和配置方式根据具体的处理器和系统架构而定。
配置中断控制器的基本步骤如下:(1)开启中断:通过设置相关的寄存器,使能中断功能。
(2)配置中断优先级:对不同中断请求进行优先级的设置,确保高优先级的中断能够被及时处理。
(3)分配中断服务例程:将不同的中断请求与相应的中断服务例程关联起来,当中断请求触发时,中断服务例程能够被正确执行。
ARM系统中断产生流程
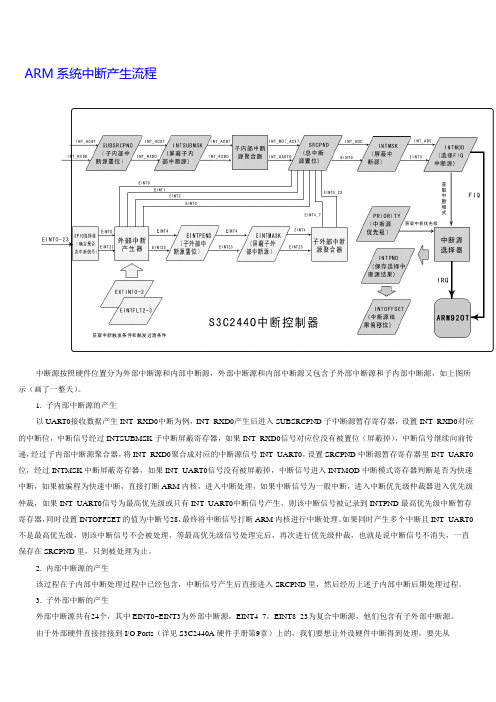
ARM系统中断产生流程中断源按照硬件位置分为外部中断源和内部中断源,外部中断源和内部中断源又包含子外部中断源和子内部中断源,如上图所示(画了一整天)。
1. 子内部中断源的产生以UAR T0接收数据产生INT_RXD0中断为例,INT_RXD0产生后进入SUBSRCPND子中断源暂存寄存器,设置INT_RXD0对应的中断位,中断信号经过INTSUBMSK子中断屏蔽寄存器,如果INT_RXD0信号对应位没有被置位(屏蔽掉),中断信号继续向前传递,经过子内部中断源聚合器,将INT_RXD0聚合成对应的中断源信号INT_UAR T0,设置SRCPND中断源暂存寄存器里INT_UAR T0位,经过INTMSK中断屏蔽寄存器,如果INT_UAR T0信号没有被屏蔽掉,中断信号进入INTMOD中断模式寄存器判断是否为快速中断,如果被编程为快速中断,直接打断ARM内核,进入中断处理,如果中断信号为一般中断,进入中断优先级仲裁器进入优先级仲裁,如果INT_UAR T0信号为最高优先级或只有INT_UAR T0中断信号产生,则该中断信号被记录到INTPND最高优先级中断暂存寄存器,同时设置INTOFFSET的值为中断号28,最终将中断信号打断ARM内核进行中断处理。
如果同时产生多个中断且INT_UAR T0不是最高优先级,则该中断信号不会被处理,等最高优先级信号处理完后,再次进行优先级仲裁,也就是说中断信号不消失,一直保存在SRCPND里,只到被处理为止。
2. 内部中断源的产生该过程在子内部中断处理过程中已经包含,中断信号产生后直接进入SRCPND里,然后经历上述子内部中断后期处理过程。
3. 子外部中断的产生外部中断源共有24个,其中EINT0~EINT3为外部中断源,EINT4_7,EINT8_23为复合中断源,他们包含有子外部中断源。
由于外部硬件直接挂接到I/O Ports(详见S3C2440A硬件手册第9章)上的,我们要想让外设硬件中断得到处理,要先从EINT0~EINT23里选择中断信号,我们以EINT11为例,介绍子外部中断处理过程。
armv8中断处理流程
ARMv8 中断处理流程一、中断请求中断请求是由硬件或软件发起的异常信号,用于打断正在执行的指令序列,将控制权转移到中断处理程序。
在ARMv8 架构中,中断请求由中断控制器(如GIC)产生,并通过中断信号线传递给处理器核。
二、中断响应当处理器核接收到中断请求时,它会根据优先级和其他因素决定是否响应中断。
如果处理器核决定响应中断,它将执行一系列指令来保存当前执行环境的状态,并跳转到中断处理程序的入口点。
在ARMv8 架构中,中断处理程序的入口点由中断向量表(IVT)或异常向量表(EVT)指定。
三、保存上下文在中断响应过程中,处理器核需要保存当前执行环境的状态,以便在中断处理程序执行完毕后能够恢复原来的执行环境。
在ARMv8 架构中,上下文保存的操作包括:1. 保存寄存器状态寄存器(xPSR)的值;2. 保存当前指令指针(PC)的值;3. 保存堆栈指针(SP)和链接寄存器(LR)的值;4. 如果当前执行环境是异常或中断处理程序,则保存相应的程序计数器(PC)和链接寄存器(LR)的值。
四、执行异常处理程序中断处理程序的入口点通常是指向异常向量表(EVT)或中断向量表(IVT)的一个跳转指令。
当处理器核跳转到这个地址时,它会执行该地址处的指令,即异常处理程序的入口点。
在执行异常处理程序时,处理器核会根据具体的异常类型和上下文信息执行相应的操作,如执行设备驱动程序或系统调用等。
五、恢复上下文在异常处理程序执行完毕后,处理器核需要恢复原来的执行环境。
在ARMv8 架构中,上下文恢复的操作包括:1. 恢复寄存器状态寄存器(xPSR)的值;2. 恢复当前指令指针(PC)的值;3. 恢复堆栈指针(SP)和链接寄存器(LR)的值;4. 如果当前执行环境是异常或中断处理程序,则恢复相应的程序计数器(PC)和链接寄存器(LR)的值。
六、中断返回在恢复上下文后,处理器核会执行一条返回指令,将控制权从异常处理程序返回给原来的执行环境。
ARM之Cortex-M内核中断异常系统详解

ARM之Cortex-M内核中断异常系统详解问题最近在使用STM32F3芯片的时候,遇到这样一个问题:如果外部中断来的频率足够快,上一个中断没有处理完成,新来的中断如何处理?在调试时,发现有中断有挂起、激活、失能等状态,考虑这些状态都是干啥用的呢!他们是Cortex-M核所共有的,因此这里不针对与具体用的STM32 MCU,直接上升到 Cortex-M内核来了解一下!简介 中断(也称为“异常”)是微控制器一个很常见的特性。
中断一般是由硬件(例如外设、外部引脚)产生,当中断产生以后 CPU 就会中断当前的程序执行流程转而去处理中断服务中指定的操作。
所有的Cortex-M 内核都会系统一个用于中断处理的组件:NVIC(Nested Vectored Interrupt Controller,嵌套向量中断控制器)。
它处理处理中断,还处理其他需要服务的事件(例如 SVC 指令),通常称为“异常”。
按照 ARM 的说法,中断也是一种异常。
Cortex-M3和 Cotex-M4 的 NVIC 最多支持 240 个 IRQ(中断请求)、1 个不可屏蔽中断(NMI)、1个 Systick(滴答定时器)定时器中断和多个系统异常。
而 Cortex-M0 最多支持32个IRQ、1 个不可屏蔽中断(NMI)、1 个 Systick(滴答定时器)定时器中断和多个系统异常。
IRQ:多数由定时器、IO端口、通信接口等外设产生NMI:通常由看门狗定时器或者掉电检测器等外设产生其他:主要来自系统内核注意,本文所说的 Cortex-M 主要指定是 Cotex-M3和 Cotex-M4。
Cortex-M0、Cortex-M0+、Cortex-M1 基于 ARMv6-M。
与Cotex-M3和 Cotex-M4相比,他们的指令集较小。
而且,Cortex-M1 是专门为FPGA应用设计的,没有独立MCU。
异常类型 Cortex-M 处理器的异常中,编号 1~15 的为系统异常,16及以上的则为中断输入。
arm中断向量表的作用及工作原理

arm中断向量表的作用及工作原理
作用:
中断向量表在嵌入式系统和计算机体系结构中扮演着关键角色,其主要作用是存储了各个中断源对应的中断服务程序的入口地址。
当CPU接收到外部或内部产生的中断请求时,它会根据中断控制器传递过来的中断号,从预先定义好的中断向量表中查找到与该中断号对应的那个条目,这个条目中存放的就是ISR的地址。
工作原理:
1.中断触发:当一个中断事件发生时,硬件设备或内部逻辑会发出中断请求信号给中断控制器。
2.中断识别与优先级处理:中断控制器接收请求后,会按照优先级进行仲裁,确定最高优先级的中断并将其中断号发送给CPU。
3.中断响应:CPU停止当前执行的任务,保存现场,然后读取中断向量表中的相应位置。
4.跳转至ISR:根据中断号在中断向量表中找到对应的地址,并执行该地址处的指令,通常这个地址包含的是跳转指令,使得CPU 跳转到相应的中断服务程序的起始地址开始执行。
5.中断服务:ISR负责处理中断请求,执行相应的错误处理、数据交换或者任务调度等操作。
6.中断返回:当ISR执行完毕后,通过特定的指令序列恢复现场,清除中断标志位,并通过中断返回指令回到被中断的正常程序流程继续执行。
新手必看 ARM里中IRQ与FIQ的不同

新手必看ARM里中IRQ与FIQ的不同
熟悉ARM学习的朋友一定知道,ARM运行时有着非常多的模式,中断模式(IRQ)和快速中断模式(FIQ)就是其中两种。
之所以特别提及到这两种模式,是因为在入门阶段,很多人对这两种模式的区别并不了解。
所以经常会造成两种模式混淆的情况,本文将为大家介绍这两种模式的区别,并简单的进行比较。
在进行比较之前,首先对这两种模式的概念进行介绍。
IRQ (InterruptRequest)指中断模式。
FIQ(FastInterrupt Request)指快速中断模式。
IRQ与FIQ是ARM处理器的两种不同编程模式(ARM有7种处理模式)。
两者的不同
1、在FIQ中,开发者必须进快处理中断请求,并离开这个模式。
2、IRQ可以被FIQ所中断,但FIQ不能被IRQ所中断,在处理FIQ时必须要关闭中断。
3、FIQ的优先级比IRQ高。
4、FIQ模式下,比IRQ模式多了几个独立的寄存器。
不要小看这几个寄存器,ARM在编译的时候,如果FIQ中断处理程序足够用这几个独立的寄存器来运作,它就不会进行通用寄存器的压栈,这样也省了一些时间。
5、FIQ的中断向量地址在0x0000001C,而IRQ的在0x00000018。
(也有的在FFFF001C以及FFFF0018)写过完整汇编系统的都比较明白这点的差别,18只能放一条指令,为了不与1C处的FIQ冲突,这个地方只能跳转,而FIQ不一样,1C以后没有任何中断向量表了,这样可以直接在1C处放FIQ的中断处理程序,由于跳转的范围限制,至少减少一条跳转指令。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
I=0时是允许IRQ,I=1是禁止IRQ初始化,sdram初始化,nandflash初始化(从nandflash启动)等等,然后把程序从nandflash 中拷贝到sdram中运行,在这段启动代码中我们免不了要初始化各种堆栈,而且是各个模式下的堆栈最好都提前设置好,这里就要考虑各种因素了。
比如我们是在OK6410平台上面测试,当复位或者开机后处于8K 大小的stepping stone中,此时我们设置堆栈是SVC下的堆栈,如果我们要设置其他模式下的堆栈的话我们就必须手动的设置CPSR下的模式位,来跳转到各个模式下设定好对应的堆栈。
因为以后是要在sdram中运行了,所以这些堆栈应当设定为sdram中的地址。
OK6410中的sdram是256M的,所以我们可以从顶部开始设置,比如说切换到irq模式,把堆栈设置为SP = 0x60000000 (因为S3C6410中内存起始地址是从0x50000000开始的,加上256M,即0x10000000,得到栈顶为0x60000000),然后切换到fiq模式下,把堆栈设置为SP = 0x5f000000,一次类推。
但是要注意的是,我们还在stepping stone中运行的时候SVC的堆栈还是得保持在片内内存的顶部即SP = 8*1024,直到要跳转到sdram中运行的时候了才把SVC的堆栈设置到sdram 中去。
有些人喜欢刚开始只设置SVC的堆栈(因为刚开启的时候就是这个模式,所以必须设置一下),而不设置别的模式的堆栈,等到中断发生了之后,在中断函数中设置堆栈的地址。
我觉得这样有些不妥,提前都设置好,以后中断进来后就省去了每次设置堆栈的步骤,提高了效率。
中断向量表:以下代码就是切换CPU工作模式的示例;********** Begin init stact ***********/;在6种模式下切换并设置堆栈指针MRS R0,CPSR ;把CPSR读取到R0BIC R0,#0x1f ;低5位清零LDR R1,=MODE_Fiq ;设置R1 为0b10001,跳转到fiq模式ORR R0,R0,R1 ;R0和R1相或,设置低5位MSR CPSR_c,R0 ;把R0的值重新赋值到CPSRLDR SP,=Stact_Fiq ;设置fiq的栈指针BIC R0,#0x1f ;低5位清零LDR R1,=MODE_Irq ;跳转Irq模式ORR R0,R0,R1MSR CPSR_c,R0LDR SP,=Stact_Irq ;设置irq的栈指针BIC R0,#0x1fLDR R1,=MODE_Svc ;跳转到svc模式ORR R0,R0,R1MSR CPSR_c,R0LDR SP,=Stact_Svc ;设置svc的栈指针BIC R0,#0x1fLDR R1,=MODE_Abort ;跳转到abort模式ORR R0,R0,R1MSR CPSR_c,R0LDR SP,=Stact_Abort ;设置abort的栈指针而可以全部由S3C6410的VIC硬件来自动处理。
这样就大大简化了中断处理编程。
另外一变化是S3C6410外部中断加入了滤波电路,这样原来需要软件去毛刺的地方均可以采用硬件来进行滤波了,这样大大简化了外部中断处理。
先看下面的关系图(从下到上越来越接近cpu内核):首先我们不采用中断方式来看各个寄存器的变化,我们用查询的方式查看,以按键中断为例,当有按键按下的时候,各个寄存器怎么变化,相互之间的关系如何:准备一个能够在串口输出字符的程序。
OK6410的KEY1是接在 GPN0上面的,通过GPNCON把它设置成中断方式,且通过EINT0CON0设置成下降沿触发方式,代码如下:01 /* set GPNIO to EINT mode , 10 --> Eint */02 temp = GPNCON ;03 temp &= ~(0x3<<0);04 temp |= (0x2<<0);05 GPNCON = temp;0607 /* set EINT triger mode to falling eage ,01x = Falling edge */08 temp = EINT0CON0 ;09 temp &= ~(0x7<<0);10 temp |= (0x3<<0);11 EINT0CON0 = temp;当按下KEY的时候,会触发中断,并且把这个信号传送到最下层的中断悬起位寄存器EINT0PEND,这个寄存器不同的bit对应不同的中断。
EINT0PEND的上层是中断屏蔽寄存器INTMASK,当这个寄存器设置为屏蔽的时候中断触发信号是无法通过它传送到上层去的。
我们先来看看当中断发生的时候EINT0PEND是如何变化的,他的变化会带来怎么样的结果。
01 while (1)02 {03 for(ch='a';ch<='z';ch++){04 if( (EINT0PEND & 0x1)==0x1){ //轮询EINT0PEND有没有被置位05 uart_putchar('+');06 }07 uart_putchar(ch);08 delay();09 }10 }上面的程序是在不停的查询EINT0PEND[0],该bit对应的是外部中断0,如果按下KEY产生一个下降沿,对应位会置位,if语句满足,会打印出一个“+”,然后出来打印字母,按键松开后是否还会满足if呢?看现象:发现按下一次之后“+”会不停的打印出来,也就是说if语句都是满足的,这就意味着EINT0PEND置位之后没有被清除,每次查询都还有,所以会不停的打印加号,所以这个寄存器我们必须手动清除,否则触发一次中断后就会不停的响应该中断。
清除的方式就是向对应位写1,我们这里是:至于清除中断悬起位的方式:3种清0的写法,只有最后一种是正确的清除。
1 PEND |= 1<<0; (not good)2 PEND = 0xFFFFFFFF; (not good)3 PEND = 1<<0; (Good!)如果PEND寄存器某个bit是0,你写一个1进去,那么会变成1。
只有当这位是1的时候写个1进去才会变成0.第一种:用或的方式,若PEND = 00011111(二进制),PEND | (1<<0) = 00011111,也就是将00011111写入到值为00011111的PEND中,那么PEND的值变成00000000,所有的位都被清0了,而不是我们原本的意思要清除第一位。
第二种:直接赋值,其实和第一种方式是一样的,只不过第一种是先求出或的值然后写进寄存器,如果原本是00011111的PEND,写进0xFFFFFFFF那么PEND中原本是0的位还是0,是1的位全部都清为0 ,还是不是我们想要的结果。
第三种:PEND = 1<< 0 ,加入PEND是00011111,把00000001赋值进来,那么得到PEND的值为00011110,刚好是我们想要的,清除我们想要清除的位。
下面我们看看EINT0MASK的屏蔽作用是怎样的效果:首先看看EINT0MASK的描述信息:可以看出哪位置1就是屏蔽对应的中断信号1 /* EINT0MASK[0] = 1 : Mask EINT0 */2 temp = EINT0MASK ;3 temp &= ~(0x1<<0);4 temp |= (0x1<<0);5 EINT0MASK = temp;屏蔽外部中断0,看中断触发信号能不能通过它传达到上面的寄存器VIC0RAWINTR。
看看VIC0RAWINTR的描述:先不屏蔽中断,看看能否在VIC0RAWINTR看到中断信号:01 /* EINT0MASK[0] = 0 : disMask EINT0 */02 temp = EINT0MASK ;03 temp &= ~(0x1<<0);04 EINT0MASK = temp;0506 uart_init();07 while (1)08 {09 for(ch='a';ch<='z';ch++){10 if( (VIC0RAWINTR & 0x1)==0x1){11 uart_putchar('+');12 }13 uart_putchar(ch);14 delay();15 }16 }按下KEY,触发中断,发现现象如下(没有清理EINT0PEND):说明在VIC0RAWINTR 检测到中断触发信号了。
如果把EINT0MASK[0]设置为1,即屏蔽信号,看看结果:怎么按KEY也检测不到中断触发信号,说明EINT0MASK是这里的一道关卡,中断触发信号能否传到上级要看这里有没有屏蔽掉,它相当于一个开关作用。
继续dismask中断触发信号,让它传递到VIC0RAWINTR ,然后清除中断悬起位,看现象是怎样的:01 /* EINT0MASK[0] = 0 : disMask EINT0 */02 temp = EINT0MASK ;03 temp &= ~(0x1<<0);04 EINT0MASK = temp;0506 uart_init();07 while (1)08 {09 for(ch='a';ch<='z';ch++){10 if( (VIC0RAWINTR & 0x1)==0x1){11 uart_putchar('+');12 EINT0PEND = 0x1;13 }14 uart_putchar(ch);15 delay();16 }17 }按一下KEY打印出一个“+”,然后查询VIC0RAWINTR 寄存器,发现中断触发信号没有了,说明EINT0PEND的值直接影响到VIC0RAWINTR 的值,VIC0RAWINTR 跟随EINT0PEND变化,EINT0PEND的变化实时反映到VIC0RAWINTR上来,当然得看MASK有没有屏蔽掉中断触发信号啦。
信号接着往上面传送,直到cpu内核检测到中断触发信号并产生对应的操作为止:使用VIC(中断向量控制器)VIC0INTENABLE的描述:对应的清除寄存器VIC0INTENCLEAR的描述:VIC0SELECT的描述:我们这里选择IRQ方式,也可以是FIQ方式。
VIC0IRQSTATUS的描述:VIC0FIQSTATUS描述:我们选择IRQ方式,并且使能中断功能,看能不能到VIC0IRQSTATUS中查询到中断触发信号:01 void mymain(void){02 unsigned char ch;03 unsigned int temp=0;0405 /* set GPNIO to EINT mode , 10 --> Eint */06 temp = GPNCON ;07 temp &= ~(0x3<<0);08 temp |= (0x2<<0);09 GPNCON = temp;1011 /* set EINT triger mode to falling eage ,01x = Falling edge */12 temp = EINT0CON0 ;13 temp &= ~(0x7<<0);14 temp |= (0x3<<0);15 EINT0CON0 = temp;1617 /* EINT0MASK[0] = 0 : disMask EINT0 */18 temp = EINT0MASK ;19 temp &= ~(0x1<<0);20 //temp |= (0x1<<0);21 EINT0MASK = temp;2223 /* VIC0INTENABLE[0]=1 : enable interrupt */24 /* clear bit by VIC0INTENCLEAR */25 temp = VIC0INTENABLE ;26 temp &= ~(0x1<<0);27 temp |= (0x1<<0);28 VIC0INTENABLE = temp;2930 /* VIC0INTSELECT[0] = 0 : set to IRQ */31 temp = VIC0INTSELECT ;32 temp &= ~(0x1<<0);33 VIC0INTSELECT = temp;3435 uart_init();36 while (1)37 {38 for(ch='a';ch<='z';ch++){39 if( (VIC0IRQSTATUS & 0x1)==0x1){40 uart_putchar('+');41 EINT0PEND = 0x1;42 }43 uart_putchar(ch);44 delay();45 }46 }按下KEY出现下面的现象:按一次打印一个“+”,说明如果是把VIC0INTENABLE对应位设置成disable,那么就会屏蔽掉中断信号,这里相当于又建立了一道关卡,它没同意就不能把信号传达到上一层。