水塔水位控制
PLC水塔水位自动控制
根据实际运行情况,对控制算法 的参数进行优化,提高系统的响 应速度和稳定性。
建立故障诊断机制,快速定位并 排除系统故障,确保水塔水位控 制的可靠性。
04
水塔水位自动控制系统 的实际应用与效果分析
水塔水位自动控制系统的实际应用
实时监测
水塔水位自动控制系统能够实时监测水塔的水位,并将数 据传输到PLC控制器。
01
自动控制
根据预设的水位阈值,系统能够自动控 制水泵的启动和停止,以保持水位的稳 定。
02
03
数据记录与分析
系统能够记录水位数据,并生成报表, 方便用户对水位情况进行统计分析。
水塔水位自动控制系统的效果分析
节能降耗
01
通过自动控制水泵的启停,避免了人工操作的延误和浪费,降
低了能耗。
提高供水稳定性
plc水塔水位自动控制
目录
• 水塔水位控制系统的概述 • PLC在水塔水位控制系统中的应用 • 水塔水位自动控制系统的设计 • 水塔水位自动控制系统的实际应用与效果分析 • 结论
01
水塔水位控制系统的概 述
水塔水位控制的意义
保证供水稳定
水塔作为供水系统的重要环节,保持水位在合理 范围内对于保证供水稳定至关重要。
执行机构
根据PLC控制器的输出信号,执行相应的动 作,如调节阀门的开度或水泵的运行状态。
水塔水位控制系统的基本原理
采集水位数据
通过水位传感器实时监测水塔内的水 位数据。
计算控制信号
执行控制动作
执行机构根据PLC控制器的输出信号, 执行相应的控制动作,调节水流量或 水泵的运行状态,以保持水塔水位的 稳定。
02
系统能够实时监测水位,避免了因水位过高或过低对供水系统
水塔水位控制
课程设计实验报告液位自动控制院系:物理与电子信息学院专业:07电气工程及其自动化姓名:任亚峰/温渝莹学号:070544080/070544005指导教师: 李天超老师设计任务书课题名称:液位自动控制设计要求:A.水塔液位自动控制,水不溢出,不缺水,无需人值班看守;B.液位伟感器成本最低;C.系统电路简单,低成本;D.符合国家卫生标准;E.符合EMC标准;F.符合用电安全(外壳安全接地≤4R:U、V、W相线对地电阻≥20MR)。
功能要求:水塔液位自动控制,水不溢出,不缺水,无需人值班看守。
学习要求:了解液位传感器、继电器、稳压管、整流器、EMC电磁兼容的基本原理:掌握继电器、稳压管、整流器等主要器件析参数的测试方法。
1.概述目前在用的水位控制方式主要有以下种:1)电极式水位控制系统:使用多个电极线与水面接触,探测水位.优点:价格便宜.缺点:属于开关量控制,无法给出实际水位.探测电极容易腐蚀,安装不便.如有污物会粘附在电极上,使水位失控。
2)浮球水位控制器分管式浮球与缆浮球。
管式浮球适合清水及粘度不大的液体。
缆浮球适合污水。
优点:价格适中,可以做出高、低、超高、超低四点控制。
缺点:属于开关量控制,无法给出实际水位。
浮球上易粘附污物,使浮球不能可靠动作,管式浮球容易卡滞,缆浮球容易缠绕,所有浮球都有触点接触不良现象。
结果都是系统失控。
调整控制点很不方便。
3)液位变送器+智能控制器方式优点:属于模拟量控制,可以实时显示水位数值,对于水位失控或设备故障可以提前预警。
集成了双泵智能控制,控制系统接线简单。
呆设高、低、超高、超低四点控制,控制点在控制器上设定,极其方便。
智能控制器可与电脑联网,可以远程监视水位及设备运行情况。
缺点::价格高。
4)超声波液位控制器优点:属于模拟量控制,可以实时显示水位数值,对于水位失控或设备故障可以提前预警。
集成了双泵智能控制,控制系统接线简单。
可设高、低、超高、超低四点控制,控制点在控制器上设定,极其方便。
水塔水位控制系统电子课程设计全文.
水塔水位控制系统电子课程设计全文.一、水塔水位控制系统的概述水塔水位控制系统是一种自动水位控制系统,主要应用于水塔的水位管理,它可以自动检测水塔的水位,并根据预设的设定值来控制水塔的水位。
系统中的核心部分为水位传感器,用于实时监测水箱的水位,上位机通过水压变送器和电磁阀控制水箱水位。
水塔水位控制系统可以有效控制低水位、高水位等水位状况,提高水塔供水效率,减少水质污染。
水塔水位控制系统主要由以下组成:1.水位传感器:水位传感器安装在水塔内,用于实时检测水塔内水位,传感器将水位数据转换成信号,供上位机控制体系读取。
2.水压变送器:水压变送器通过水压变频器把信号转换成变动的阀门控制电流,用于控制水塔水位,保持在安全范围。
3.电磁阀:电磁阀用于控制水塔内水位,当水位过高时,电磁阀自动开阀引水排出;当水位过低时,电磁阀自动关阀,停止水位控制。
4.上位机:上位机主要用于控制系统的数据采集和参数设置,实时显示水位变化,记录水塔的水位变化,���便用户管理。
水塔水位控制系统的工作原理主要是通过水位传感器实时检测水塔水位,把水位高度数据转换成信号,由上位机控制,再经过水压变送器,控制电磁阀的开关,一旦水位超过预设的范围,系统将自动打开阀门,排出多余的水,当水位低于设定值时,阀门将自动关闭,以保持水位在安全范围内。
1.可实现自动控制,减少人工介入,安全性高。
2.系统运行可靠,采用传感器及计算机控制技术,精准可靠,运行稳定性高。
3.采用智能及精确控制技术,精确度高,水位控制精度可达0.1米。
4.可扩展性强,系统布线简单,无需增设其他电源,可根据实际需要,自动添加检测和控制元件。
五、安装工作1.根据实际水位检测点的位置安装水位传感器。
2.安装及调试水压变送器。
3.根据需要设置水位控制器参数,包括水位上、下限及低压保护阈值等。
4.安装电磁阀,并完成接线,确保系统的正常运行。
5.对控制系统的基本功能进行检测和调试,确保控制系统的性能达到设计要求。
第7章水塔水位控制
三、程序流程图
四、I/O分配
PLC地址(PLC端子) 电气符号(面板端子)
X00 X01 X02 S1 S2 S3
功能说明
水塔液位上限位 水塔液位下限位 水池液位上限位
X03位 抽水电机 进水阀门
电源端
主机COM0、COM1、COM2等接电源GND
七、程序设计
2.当水位低于S4时,阀Y开启,系统开始向水池中注 水,5S后如7.果水池中的水位还未达到S4,则Y指示 灯闪亮,系统报警。 3.当水池中的水位高于S3、水塔中的水位低于S2,则 电机M开始运转,水泵开始由水池向水塔中抽水。 4.当水塔中的水位高于S1时,电机M停止运转,水泵 停止向水塔抽水。
五、接线图
六、操作步骤 1.按控制接线图连接控制回路; 2.将编译无误的控制程序下载至PLC中,并将 模式选择开关拨至RUN状态; 3.将各限位开关拨至以下状态:S1=0、S2=0、 S3=0、S4=0,观察阀门Y状态,5S后如果S4仍 然未拨至ON状态,则Y状态如何? 4.将S4拨至ON,观察抽水电机M状态;继而将 S1拨至ON,观察抽水电机M状态。 5.尝试编译新的控制程序,实现不同于示例 程序的控制效果。
水塔水位控制
水塔水位控制
一、工艺要求
二、控制要求 1.各限位开关定义如下:
S1定义为水塔水位上部传感器(ON:液面已到水塔上限位、OFF:液面未到 水塔上限位) S2定义为水塔水位下部传感器(ON:液面已到水塔下限位、OFF:液面未到 水塔下限位) S3定义为水池水位上部传感器(ON:液面已到水池上限位、OFF:液面未到 水池上限位) S4定义为水池水位下部传感器(ON:液面已到水池下限位、OFF:液面未到 水池下限位);
水塔水位控制系统[001]
![水塔水位控制系统[001]](https://img.taocdn.com/s3/m/bb8358907e192279168884868762caaedd33bab3.png)
水塔水位控制系统引言水资源的合理利用是现代社会可持续发展的重要环节,对于一些需要存储和调控水资源的场所,例如城市、农田或工业区等,水塔是一个非常重要的设施。
水塔水位控制系统是一种自动化控制系统,用于监测和维护水塔的水位在合适的范围内。
本文将介绍水塔水位控制系统的工作原理、组成部分以及其应用领域。
工作原理水塔水位控制系统通过使用传感器测量水塔的水位,并将测量值传输给控制器进行处理。
根据设定的水位范围,控制器将开启或关闭水泵以控制水的进出。
当水位低于设定下限时,控制器将打开水泵,将水从外部供水系统或水源中抽入水塔;当水位达到设定上限时,控制器将关闭水泵,阻止水的进入。
组成部分一个典型的水塔水位控制系统由以下几个组成部分构成:•水位传感器:用于测量水塔的水位。
常用的传感器类型包括浮球型传感器、超声波传感器等。
传感器将水位信息转换为电信号,并传输给控制器。
•控制器:接收传感器传输的水位信息,并根据设定的水位范围,控制水泵的开启和关闭。
常见的控制器类型有单片机控制器、PLC控制器等。
•水泵:根据控制器的指令,控制水的进出。
水泵负责将水从外部水源供给到水塔中,或将水从水塔送入供水系统。
•电源:为水位传感器、控制器和水泵提供电力。
电源通常是交流电或直流电。
•通信模块(可选):用于与远程监控系统进行通信,实现远程监控和控制。
通信模块可以通过有线或无线方式与远程系统进行数据传输。
应用领域水塔水位控制系统被广泛应用于各个领域,包括城市供水系统、农田灌溉系统、工业生产场所等。
以下是几个常见的应用场景:•城市供水系统:水塔水位控制系统用于城市的供水系统,确保水塔的水位在合适的范围内,保障城市居民的供水需求。
•农田灌溉系统:水塔水位控制系统可以用于农田的灌溉系统,确保农田得到适量的水源供给,提高农作物的产量。
•工业生产场所:一些工业生产过程需要大量的水资源,水塔水位控制系统可以确保工业场所得到稳定的供水,保证生产的连续性。
PLC-水塔水位自动控制-
(2)常数
在编程中经常会使用常数。常数数据长度可为字节、字和双字, 在机器内部旳数据都以二进制存储,但常数旳书写能够用二进制、 十进制、十六进制、ASCII码或浮点数(实数)等多种形式。几种 常数形式分别如表3.9所示。
CPU旳存储区
1. 输入映像寄存器(I)(I0.0~I15.7),每个扫描周期采样。 2.输出映像寄存器(Q)(Q0.0~Q15.7),每个扫描周期末尾 3. 变量存储器(V) 4.位存储器(M)区(M0.0~M31.7) 5.定时器(T)存储器区 6.计数器(C)存储器区 7.高速计数器(HC) 8.累加器(AC) 9. 特殊存储器(SM)标志位 如SM0.0,SM0.1,SM0.4,SM0.5
CPU旳存储区
10.局部存储器(L)区 11.模拟量输入映像寄存器(AI) 12.模拟量输出映像寄存器(AQ) 13.顺序控制继电器(S)
三、寻址方式
1. 直接寻址方式
按位寻址 存储区内另有某些元件是具有一定功能
旳硬件,因为元件数量极少,所以不用 指出元件所在存储区域旳字节,而是直 接指出它旳编号。 按字节、字或双字寻址
返回本节
PLC编程语言旳国际原则
1.顺序功能图 2.梯形图 3.功能块图 4.语句表 5. 其他编程语言
图3.4 顺序流程图
1. 顺序功能图
T0 S1
T1 S2
S T2 S3
S
T3 T8
S8 S
T9
2. 梯形图(LAD)
图3.2 梯形图举例
3. 功能块图(FBD)
功能块图(FBD)旳图形构造与数字电子电路旳构 造极为相同,如下图3.3所示。
必须指定存储器标识符、字节地址和位号,如 图3.8 所示。图3.8中MSB表达最高位,LSB表
任务二 水塔水位的PLC控制
低速定时器
OUT T
低速累计定时器 OUT ST
0.1~3276.7
ENO:=OUT_T(EN,C oil,Value);
普通定时器 累计定时器
OUTH T OUTH ST
0.01~327.67
高速定时器
OUTHS T
高速累计定时器 OUTHS ST
0.001~32.767
ENO:=OUTH(EN,Co il,Value);
11
项目一 任务二 水塔水位的PLC控制
FX5UPLC定 时器的分类
通用定时器 累计定时器
低速定时器
普通定时器
高速定时器
低速累计定 时器
普通累计定 时器
高速累计定 时器
12
项目一 任务二 水塔水位的PLC控制
表1-14 定时器输出指令使用要素
名称
助记符 定时范围(s)
梯形图表示
FBD/LD表示
ST表示
编号
功能描述
SM400 SM401 SM402
SM0 SM52 SM409 SM410 SM412 SM471030
SM8000 SM8001 SM8002 SM8004 SM8005 SM8011 SM8012 SM801231 SM8-022 SM801249 SM802304
运行监视,PLC运行时为ON 运行监视,PLC运行时为OFF 初始化脉冲,仅在PLC运行开始时ON一个扫描周期 发生出错,OFF:无出错,ON:有出错 PLC内置电池电压过低时为ON 10ms时钟脉冲,通、断各5ms 100ms时钟脉冲,通、断各50ms 1借s位时标钟志脉位冲:,减通、运断算各结0果.5为s 零时置位 2进s时位钟标脉志冲位,:通加、运断算各有1进s 位或结果溢出时置位 1指mi令n时执钟行脉完冲成,标通志、位断:各执3行0s完成为ON 零为标ON志时位禁:止加全减部运输算出结果为零时置位
水塔水位控制
水塔水位控制概述水塔是城市供水系统中的重要组成部分,它负责存储和供应给城市居民所需的水资源。
为了保持水塔的正常运行和水位的稳定,水塔水位控制是至关重要的。
目标水塔水位控制的主要目标是维持水塔水位在一个合理范围内,既不会溢出也不会过低。
通过合理的控制水塔的进水和出水流量,可以实现水位的稳定控制。
控制原理水塔水位控制可以通过几种方式实现,常见的方法有:浮球开关控制、压力传感器控制和液位传感器控制。
下面将简要介绍这些方法的原理。
1. 浮球开关控制浮球开关是通过浮动球的上升和下降来感知水位变化的。
当水位上升到一定高度时,浮球会随之上升,触发开关动作,控制进水阀门关闭;当水位下降到一定低度时,浮球下降,开关触发,进水阀门打开。
通过这种方式可以实现水位的控制。
2. 压力传感器控制压力传感器可以感知水塔内部的水压。
当水位上升时,水压也会相应增加;当水位下降时,水压减小。
通过监测水压的变化,可以控制进水和出水阀门的开闭,从而实现水位的控制。
3. 液位传感器控制液位传感器可以直接感知到水位的高度,通常通过使用电极来测量水位的变化。
当水位上升到一定高度时,液位传感器会触发控制信号,控制进水阀门关闭;当水位下降到一定低度时,信号触发,进水阀门打开。
这种方式也可以实现水位的控制。
控制方法在实际应用中,一般会结合多种控制方法来实现水塔水位的控制,以提高控制的准确性和可靠性。
下面是一种常见的水塔水位控制方法的流程图示例:graph TDA[获取当前水位] --> B[根据水位控制信号判断是否需要进水]B --> |需要进水| C[打开进水阀门]B --> |不需要进水| C[关闭进水阀门]C --> D[等待一段时间]D --> E[根据水位控制信号判断是否需要出水]E --> |需要出水| F[打开出水阀门]E --> |不需要出水| F[关闭出水阀门]F --> G[等待一段时间]G --> A该控制方法的基本流程如下: 1. 获取当前水位信息 2. 根据水位控制信号判断是否需要进水 3. 如果需要进水,则打开进水阀门,否则关闭进水阀门 4. 等待一段时间,让水位有时间上升或下降 5. 根据水位控制信号判断是否需要出水 6. 如果需要出水,则打开出水阀门,否则关闭出水阀门 7. 等待一段时间,让水位有时间上升或下降 8. 回到第1步,进行下一次水位控制控制策略为了更好地控制水塔水位,需要制定合理的控制策略。
水塔水位控制系统

水塔水位控制系统水塔水位控制系统是一种能够监测和控制水塔水位的智能化系统。
水塔作为储存和供给水源的设施,其水位的控制和管理对于保证正常的供水是至关重要的。
传统的水塔水位控制方式主要依靠人工监测和控制,但这种方式存在人力资源浪费、不够高效和容易出现人为错误等问题。
所以,采用水塔水位控制系统能够实现智能化的水位监测和控制,提高供水管理的效率和质量。
水塔水位控制系统主要由水位传感器、单片机控制器、执行器和数据处理单元组成。
水位传感器用于感知水位的高低,传输给控制器;单片机控制器负责接收并处理传感器传过来的数据,并根据预设的监测参数和逻辑,控制执行器进行相应的调节操作;执行器则根据控制器的指令,控制水流进出水塔,从而调节水位;数据处理单元则负责对监测数据进行存储和分析。
水塔水位控制系统的工作原理如下:首先,水位传感器通过测量水位的高低,将信号传输给控制器。
控制器接收到信号后,通过单片机处理器进行数据处理,并根据事先设定好的监测参数和逻辑进行判断和决策。
例如,当水位过低时,控制器会通过执行器控制阀门打开,让水流进入水塔,增加水位;当水位过高时,控制器则会通过执行器控制泵站排水,降低水位。
这样,系统就能够自动调节水位,保持在合适的范围内。
水塔水位控制系统具有以下几个优点:首先,它能够实现实时监测和控制水位,不需要人工干预,避免了人为错误的发生。
其次,系统具有高度的智能性,可以根据事先设定的参数和逻辑进行自动调节和控制,提高了供水管理的效率和质量。
再次,系统具有较高的可靠性和准确性,传感器精准地测量水位,数据处理单元对监测数据进行存储和分析,保证了数据的准确性和稳定性。
最后,系统结构简单、维护容易,降低了维护成本和管理难度。
水塔水位控制系统的应用范围广泛,可以用于城市供水系统、建筑工地、农田灌溉等多个领域。
在城市供水系统中,水塔水位控制系统能够自动控制和调节水位,保证正常供水,解决人工监测和调节不及时的问题。
水塔水位自动控制
水塔水位自动控制控制要求当水池液面低于下限水位(S4为ON表示),电磁阀Y打开注水,S4为OFF,表示水位高于下限水位。
当水池液面高于上限水位(S3为ON表示),电磁阀Y关闭。
当水塔水位低于下限水位(S2为ON表示),水泵M工作,向水塔供水,S2为OFF,表示水位高于下限水位。
当水塔液面高于上限水位(S1为ON表示),水泵M停。
当水塔水位低于下限水位,同时水池水位也低于下限水位时,水泵M不启动。
实验现象将开关S4闭合,指示灯Y亮,开始注水,闭合S3,Y灯灭,停止注水。
将开关S2闭合,指示灯M亮,开始向水塔供水,闭合S1,M指示灯灭,停止供水。
实验总结这个实验挺简单的,通过我们小组的共同努力,团结协作,迅速地实现了控制要求,通过这个实验,我们更熟悉了接线以及控制操作过程,为下边的更难的实验做好了准备。
交通灯控制交通灯控制要求:该单元设有启动和停止开关S1、S2,用以控制系统的“启动”与“停止”。
S3还可屏蔽交通灯的灯光(利用M8034,使PLC的外部输出接点皆为OFF)。
交通灯显示方式。
当东西方向红灯亮时,南北方向绿灯亮,当绿灯亮到设定时间时,绿灯闪亮三次,闪亮周期为1秒,然后黄灯亮2秒。
当南北方向黄灯熄灭后,东西方向绿灯亮,南北方向红灯亮………周而复始,不断循环。
其时序图如下图所示。
X000SNR EWG EWY EWR SNG SNY25s20s3s2s实验现象将开关S1闭合,M0得电并自锁,系统开始工作,南北红灯,东西绿灯亮,2s后东西绿灯闪亮,东西绿灯闪亮3s后,Y4线圈失电,东西绿灯熄灭,同时东西黄灯亮,亮3s后,黄灯熄灭,南北红灯熄灭,东西红灯亮,南北绿灯亮,如此往返循环。
实验总结生活中常见的交通灯由我们共同的努力实现了功能,我们又深刻的体会到了PLC 在生活中的用途,增加了对PLC的兴趣,在这个实验中,使用了主控指令MC,并熟悉掌握了其功能用法。
通过这个实验,我们更加熟练了PLC接线以及各种控制操作。
水塔水位控制
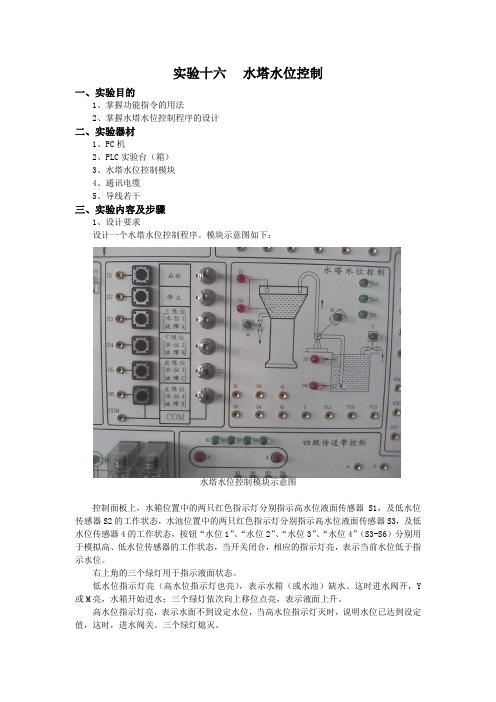
实验十六水塔水位控制一、实验目的1、掌握功能指令的用法2、掌握水塔水位控制程序的设计二、实验器材1、PC机2、PLC实验台(箱)3、水塔水位控制模块4、通讯电缆5、导线若干三、实验内容及步骤1、设计要求设计一个水塔水位控制程序。
模块示意图如下:水塔水位控制模块示意图控制面板上,水箱位置中的两只红色指示灯分别指示高水位液面传感器S1,及低水位传感器S2的工作状态,水池位置中的两只红色指示灯分别指示高水位液面传感器S3,及低水位传感器4的工作状态,按钮“水位1”、“水位2”、“水位3”、“水位4”(S3-S6)分别用于模拟高、低水位传感器的工作状态,当开关闭合,相应的指示灯亮,表示当前水位低于指示水位。
右上角的三个绿灯用于指示液面状态。
低水位指示灯亮(高水位指示灯也亮),表示水箱(或水池)缺水。
这时进水阀开,Y 或M亮,水箱开始进水;三个绿灯依次向上移位点亮,表示液面上升。
高水位指示灯亮,表示水面不到设定水位,当高水位指示灯灭时,说明水位已达到设定值,这时,进水阀关。
三个绿灯熄灭。
当出水阀打开时,三个绿灯循环闪烁,表示液面不定。
当水箱低水位开关K4(X3)打开时,K8(X6)合上,出水阀输出Q(Y6)不能打开,否则出水阀能打开;用三灯循环闪烁, 表示液面不定;启动按钮S1(X0),停止按钮S2(X1)是水池进水阀Y、水箱进水阀M 的总控制开关;S1,S2(传感器)亮--→M启动(三灯依次向上移位点亮,表示液面上升)S1,S2(传感器)灭--→M才停止不启动(三灯灭)水池:S3,S4(传感器)亮--→Y启动,M不能启动S3亮,S4(传感器)灭--→Y启动,M能启动S3,S4(传感器)灭--→ Y不启动,M能启动。
水塔水位控制系统

水塔水位控制系统
水塔水位控制系统是一种用来控制水塔水位的系统。
它通常由传感器、控制器和执行器组成。
传感器用来测量水塔中的水位,常见的传感器包括浮球传感器和压力传感器。
浮球传感器通过测量浮球的位置来确定水位高低,而压力传感器则通过测量水压来推断水位情况。
控制器是系统的核心部分,它接收传感器的信号并根据预设的水位设定值来调节执行器的运行。
控制器可以使用逻辑控制、PID控制等算法来计算输出信号。
执行器是控制水位的关键部分,它根据控制器的指令来进行相应的动作。
执行器可以是阀门、泵或排水装置等。
水塔水位控制系统的工作原理如下:当水位低于设定值时,传感器会向控制器发送信号,控制器会打开执行器使水进
入水塔;当水位超过设定值时,传感器会再次向控制器发
送信号,控制器会关闭执行器停止水的进入。
水塔水位控制系统的优点是可以实现自动化的水位控制,
节省人力和物力成本,并且能够保持水位的稳定性和安全性。
它在工业生产、农业灌溉和民用供水等领域都有广泛
的应用。
水塔水位控制系统设计精品

控制算法设计
根据水塔的实际情况和用户 需求,设计合适的控制算法 ,如PID控制、模糊控制等 ,实现对水位的精确控制。
执行机构选择
根据控制算法的要求,选择 合适的执行机构,如水泵、 阀门等,实现对水位的调节 。
通信与监控
建立水塔水位控制系统的通 信与监控网络,实现远程监 控、数据采集和故障预警等 功能。
防洪抗旱 在洪水或干旱时期,水塔水位控 制系统可发挥调节作用,减轻灾 害损失,保障人民生命财产安全 。
农业灌溉
在农业灌溉领域,水塔水位控制 系统能够根据土壤湿度和作物需 水情况,自动调节灌溉水量,提 高水资源利用效率。
工业冷却水供应
在工业生产中,水塔水位控制系 统可为冷却设备提供稳定的水源 ,确保设备正常运行,降低能耗 。
重要性
水塔水位控制系统对于保证供水系统 的稳定运行具有重要意义,能够避免 因水位过高或过低对供水系统造成的 影响,提高供水效率和水质安全。
水塔水位控制系统的历史与发展
历史
水塔水位控制系统最初采用人工 控制方式,随着技术的发展,逐 渐演变为自动化控制系统。
发展
现代水塔水位控制系统不断引入 新技术和智能化设备,如传感器 、PLC控制器、变频器等,实现 更加精准和高效的控制。
数据处理
对采集到的数据进行预处理和分析,为控制 算法提供准确可靠的数据支持。
安全保护机制的建立
权限管理
设置不同等级的用户权限,确保只有授权用户才能进行相应的操作。
异常处理
当出现异常情况时,系统能够及时报警并采取相应的安全措施,如自动关闭阀门、启动 备用设备等。
05
CATALOGUE
水塔水位控制系统的调试与优化
标准化与模块化
为便于系统的集成、互换和维护,水塔水位控制系统将逐步实现标准 化和模块化设计。
水塔水位控制器
节能:水塔水位控制 器能够根据实际需求 调整用水量,避免浪 费,降低能源消耗。
环保:水塔水位控制 器采用非接触式液位 传感器,避免了传统 接触式传感器对水质 的污染,更加环保。
高效:水塔水位控制 器能够实现快速响应 和精准控制,提高用 水效率和管理效率。
安全:水塔水位控制 器具备过压过流保护 功能,能够保证供水 系统的安全稳定运行 。
执行电路:根据控 制电路的指令,控 制水泵的开关状态
水塔水位控制器的控制算法基于PID(比例-积分-微分)调节原理。
控制算法通过实时监测水塔水位,计算水位偏差,并调整水泵的运行状态,以实现水位 的自动调节。
控制算法中还包括防溢防涸功能,以防止水塔溢水或缺水。
控制算法采用模块化设计,便于维护和升级。
城市供水系统:提高供水效率,保障城市居民用水需求 农业灌溉:实现精准灌溉,提高农业产量 工业冷却系统:优化冷却效果,降低能耗 地下水保护:实时监测地下水位,预防地下水污染
物联网技术:实现远程监控和数据采集 人工智能:提高预测精度和自动化水平 传感器技术:提高水位检测的准确性和稳定性 云计算:实现数据共享和分析,为决策提供支持
汇报人:XX
传感器类型:水 位传感器
工作原理:通过测 量水位高度变化, 转换为电信号输出
输出信号:模拟 信号或数字信号
优点:实时监测、 精度高、稳定性 好
家庭用水塔的介 绍
水塔水位控制器 在家庭用水塔中 的应用
水塔水位控制器 如何实现家庭用 水塔的自动控制
家庭用水塔使用 水塔水位控制器 的优势和效益
农业灌溉中,水塔水 位控制器能够自动调 节灌溉系统的水量, 确保土壤湿度适中, 促进作物生长。
节能环保:水塔水位控制器将更加注重节能和环保设计,减少能源浪费和环境污染。
项目6水塔水位控制4课时
02 水塔水位控制原理
水塔水位控制的基本原理
水塔水位控制的基本原理是通过调节水塔的进水和出水流量,使水塔的水位保持在 设定的范围内。
水塔水位控制是水处理系统中的重要环节,它能够保证水塔的正常运行,防止水溢 出或抽空,同时保证水质的稳定。
水塔水位控制需要实时监测水塔的水位,并根据水位的变化情况调整进水和出水流 量。
灌溉用水调节
在农业灌溉中,水塔水位控制可 以有效调节灌溉用水的流量和压 力,满足不同作物和地形条件下
的灌溉需求。
防止水患灾害
在雨季或洪水期间,通过水塔水位 控制,可以及时调节水库或水池的 水位,减轻下游地区的洪涝灾害风 险。
提高农业用水效率
通过水塔水位控制,可以实现农业 用水的精准控制和合理分配,提高 农业用水效率,促进农业可持续发 展。
3. 在操作过程中,遵循设备 的操作规程,避免发生意外事
故。
水塔水位控制实验结果的分析与讨论
结果分析
分析实验数据,评估水塔水位控制的 准确性和稳定性。对比实际水位与预 设水位的变化,分析误差产生的原因 。
结果讨论
根据实验结果,讨论水塔水位控制系 统的优缺点,提出改进措施。探讨如 何优化控制算法,提高水塔水位控制 的精度和稳定性。
水塔水位控制在城市供水系统中的应用
保障供水安全
城市供水系统是城市居民生活和经济发展的重要基础设施,水塔水 位控制可以有效保障供水系统的安全稳定运行。
应对突发事件
在突发事件如水管破裂、自然灾害等情况下,通过水塔水位控制可 以迅速调节供水系统的运行状态,保障城市居民的正常用水需求。
优化供水调度
通过水塔水位控制,可以合理地调度供水系统的水量和压力,提高供 水效率,降低供水成本。
水塔水位控制
水塔水位控制在水塔水位控制区完成本实验。
一、实验目的1.通过对工程实例的模拟,熟练地掌握PLC的编程和程序调试方法;2.进一步熟悉PLC的I/O连接。
3.熟悉上升沿、下降沿触发指令。
二、实验原理当水池水位低于水池低水位界(S4由ON变为OFF),阀Y打开进水(Y为ON);当水池水位到达水池高水位界(S3由OFF变为ON),阀Y关闭(Y为OFF)。
当S4为ON 时,且水塔水位低于水塔低水位界时S2为OFF,电机M运转抽水。
当水塔水位高于水塔高水位界时(S1为ON),电机M停止。
三、装置介绍S1、S2、S3、S4分别为水池、水塔高、低水界开关,模拟真实水塔系统的液位传感器。
M为电动机,Y为水塔池阀门。
四、输入/输出分配(一)输入:(二)输出:五、实验方法1.按照输入和输出两个配置表,将PLC的输入输出与相应面板符号的插孔用连接线连好;2.按照输入输出配置,参照参考程序,编写实验程序;3.下载编写程序到PLC,运行程序;4.模拟动作实验板上的按钮和开关,验证所编程序的逻辑。
天塔之光在天塔之光实验区完成本实验。
一、实验目的1.通过对工程实例的模拟,熟练地掌握PLC的编程和程序调试方法;2.进一步熟悉PLC的I/O连接;3.学会控制较多的对象。
二、实验原理本实验模拟霓虹灯。
按下启动按钮后,要求按以下规律显示:L1→L1、L2、L3、L4、L5→L1、L2、L3、L4、L5、L6、L7、L8、L9……如此循环,周而复始。
SD、ST分别为启动、停止按钮;L1、L2、L3、L4、L5、L6、L7、L8、L9分别模拟显示天塔的各个灯四、输入/输出分配(一)输入:(二)输出:五、实验方法1.按照输入和输出两个配置表,将PLC的输入输出与相应面板符号的插孔用连接线连好;2.按照输入输出配置,参照参考程序,编写实验程序;3.下载编写程序到PLC,运行程序;4.模拟动作实验板上的按钮和开关,验证所编程序的逻辑。
十字路口交通灯控制的模拟在十字路口交通灯模拟控制实验区完成本实验。
水塔水位控制

PLC工作后,只要水池液面低于下水位下限,开关i3闭合,电磁阀继电器q0线圈得电后动作,阀q0打开,准备进水。
时间继电器T1线圈得电开始计时。
若4秒后无水正常进入水池,则开关i3不能断开,说明出现故障,电磁阀报警指示灯闪烁报警;若4秒内有水进入水池,i3由闭合变为断开,水池水位上升,水位到达上水位上限后,开关i4由闭合变为断开,电磁继电器线圈失电关闭阀,不进水。
只要水塔水位i2低于下水位下限时,开关i2闭合水泵电动机工作,开始抽水,当水位上升到上水位上限位时,开关i1断开水泵电动机失电,停止抽水。
实验11 水塔水位控制
实验11 水塔水位控制
一、实验目的
1、用PLC构成水塔水位控制系统。
2、熟悉基本指令的功能及应用。
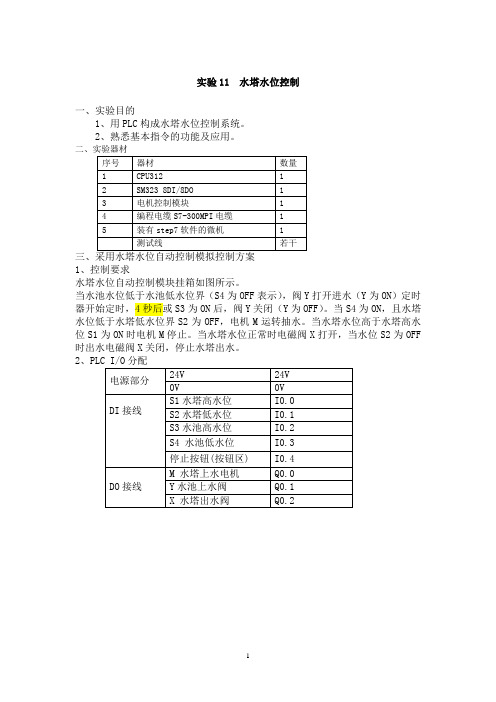
1、控制要求
水塔水位自动控制模块挂箱如图所示。
当水池水位低于水池低水位界(S4为OFF表示),阀Y打开进水(Y为ON)定时器开始定时,4秒后或S3为ON后,阀Y关闭(Y为OFF)。
当S4为ON,且水塔水位低于水塔低水位界S2为OFF,电机M运转抽水。
当水塔水位高于水塔高水位S1为ON时电机M停止。
当水塔水位正常时电磁阀X打开,当水位S2为OFF 时出水电磁阀X关闭,停止水塔出水。
2、
3、实验步骤
(1)按控制要求和所确定的I/O分配接线
(2)按控制要求和所确定的I/O分配编写PLC应用程序。
(3)完成PLC与实验模块的外部电路连接,然后通电运行:
四、实验报告要求
1、画出PLC I/O端口和电源接线图。
2、编写程序梯行图。
3、整理出运行和监视程序时出现的现象。
水塔水位个人总结
水塔水位个人总结
水塔水位是指水塔内的水位高度,用于保存和调节供水的水量。
水塔水位的高低直接
影响供水的稳定性和水压的大小。
以下是个人对水塔水位的总结:
1. 水塔水位的重要性:水塔水位是供水系统的重要指标,它直接影响用户的用水体验
和供水的可靠性。
水塔水位过低会导致供水不足,水压不稳定,甚至停水;水塔水位
过高则会造成水的浪费和压力过大,可能会损坏供水设备。
2. 水塔水位的控制和调节:水塔水位的控制需要通过水泵和调节阀等设备进行,以维
持水位在合理范围内。
水塔水位的调节要根据实际需求和供水量来确定,避免出现供
水不足或浪费的情况。
3. 水塔水位的监测和管理:水塔水位需要定期监测和管理,确保水位的准确性和稳定性。
常见的监测方法包括水位计和远程监控系统等,可实时监测水位并进行调控。
4. 水塔水位的变化原因:水塔水位的变化受多种因素影响,包括供水量的变化、用水
量的波动、水泵的运行状态等。
因此,水塔水位的变化需要及时分析和处理,以保持
供水的稳定性。
5. 水塔水位的安全与维护:水塔水位的安全性和维护需得到重视。
水塔的结构要经过
专业设计和施工,确保安全可靠;水塔的维护包括定期检查和清洁,避免因污染或损
坏导致水位异常。
综上所述,水塔水位是供水系统中的重要参数,对供水的稳定性和可靠性起着至关重
要的作用。
合理控制、监测和管理水塔水位,能够确保供水的连续性和用水的满意度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水塔水位控制1、中英文摘要摘要:本水位控制系统采用80C51为控制芯片设计的控制电路,所编程序采用查询方式对由P1.0和P1.1输入水位信号进行检查,输入信号有四种状态,通过硬件原理图可以确定每种水位信号的含义,从而可以根据输入信号的状态执行相应的子程序对电动机的工作与停止、故障报警装置以及硬件检查程序进行控制,从而达到硬件检测、故障报警和水位控制的功能。
关键词:80C51,硬件检测,水位控制Abstract: The water level control system using 80C51 chip design for the control of the control circuit, the programmed manner using query by P1.0 and P1.1 input signal level inspection, there are four kinds of input signal status, through the hardware schematic diagram to determine the meaning of each level signal, allowing the input signal according to the state of implementation of the corresponding subroutine of the motor work and stop, fault alarm and hardware inspection procedures to control, so as to achieve the hardware detection, failure alarm, and water level control functions.Keywords: 80C51, hardware detection, water level control, failure alarm- 1 -2、引言《单片原理及应用》是一门技术性、应用性很强的学科,实践教学是它的一个极为重要的环节。
不论是硬件扩展、接口应用还是编程方法、程序调试,都离不开实验教学。
如果不在切实认真地抓好学生的实践技能的锻炼上下功夫,单凭课堂理论课学习,势必出现理论与实践脱节的局面。
任随书本上把单片机技术介绍得多么重要、多么实用多么好用,同学们仍然会感到那只是空中楼阁,离自己十分遥远,或者会感到对它失去兴趣,或者会感到它高深莫测无从下手,这些情况都会令课堂教学的效果大打折扣。
本次仿真设计的目的就是让同学们在理论学习的基础上,通过完成一个涉及MCS—51(见附录1)单片机各种资源应用并具有综合功能的小系统目标板的设计与编程应用,使学生不但能够将课堂上学到的理论知识与实际应用结合起来,而且能够对电子电路、电子元器件、印制电路板等方面的知识进一步加深认识,同时在软件编程、排版调试、焊接技术、相关仪器设备的使用技能等方面得到较全面的锻炼和提高,为今后能够独立进行某些单片机应用系统的开发设计工作打下一定的基础。
该水塔水位控制电路能够实现监测水位并根据水位高低控制电机的工作与停止来保证水塔水位保持在额定范围内,从而实现水位控制。
同时,通过分析不合理的状态显示做出电路的路障诊定判断,从而避免因系统的故障影响水塔水位的控制。
在上一学期进行的EDA课程学习,本次综合实践是在此基础上,来完成该系统的软件设计与调试。
待仿真成功后,再将程序写入单片机中。
3、课程设计用的仪器和器件(技术参数见附录2)1、PC机一台;TND-MD教学实验系统一台2、XLISP1000 单片机综合仿真实验仪3、9V直流电压供电4、水泵1个5、万能板一块,规格为12cm*18cm6、4K7欧电阻2个,51欧电阻1个7、二极管1个8、三极管1个,型号SBD509、继电器1个,型号SRD-09VDC-SL-C10、光电耦合器1个,型号4N25813Q- 2 -- 3 -11、导线若干,水桶1个,水管1米,电烙铁等 4、硬件设计 4.1设计目标(1)当水位低于下限水位即检测信号P1.0=0,P1.1=0时候则致P1.2=1功过光电耦合器使中间继电器J 吸合,从而控制强电控制系统水泵供水。
(2)当水位上升到上限和下限之间(P1.0=1,P1.1=0)的时候就保持原来的状态。
(3)当水位超过上限(P1.0=1,P1.1-1)的时候,控制系统停电,停止抽水。
(4)当检测信号在下限没有反映而在上限有反映的时候(P1.0=0,P1.1=1)就使水泵停止抽水且发出报警(P1.2=0,P1.4=1,P1.5=1) 4.2设计思想图1(1)用80C51设计一个单片机最小控制系统。
其中P1.0接水位下限传感器;P1.1接水位上限传感器;P1.2输出经反相器后接光电耦合器,通过继电器控制水泵工作;P1.3输出经反相器后接LED,当出现故障是LED闪烁;P1.4输出器接蜂鸣器,当故障出现时报警。
(2)用塑料尺、导线等设计一个水塔水位传感器。
其中A电极置于水位10cm 处,接5V电源正极;B电极置于水位15cm处,经4.7K下拉电阻接单片机的P1.0口;C电极置于水位的20cm处,经4.7下拉电阻接单片机的P1.1口。
(3)设计一个单片机至水泵的控制电路。
要求单片机与水泵之间要用反相器、光电耦合器和继电器控制,计算出LED限流电阻,接好继电器的续流二极管。
如图1所示。
5、软件设计水塔水位控制流程图如图2图2源程序见附录3- 4 -6、调试过程在硬件芯片引脚连线和程序的编写完成以后,便进入了设计的调试阶段。
在计算机上输入程序后,在与硬件的配合使用下,才发现设计中的错误是如此的多。
我按以下步骤进行了调试:(1) 首先检查硬件的连接情况,在检查的过程中发现了以下的问题:GND引脚未接地、各个芯片的数据端D0~D7与系统总线的D0~D7接反,这些错误是一些在实验或设计中容易忽略犯下的错误,但是经过仔细的检查,这些问题都很快得到了解决。
(2) 根据运行后计算机屏幕上显示的错误或警告信息检查到程序中的很多错误。
如:芯片初始化时奇偶入口地址的选择错误、程序中一些低级的输入错误等。
这些错误经过认真检查,并通过老师和同学的帮助以及查看《微机原理与接口技术实验指导书》等相关文献,这些错误最终得到了修正,完成了软硬件的联调。
7、结果分析通过对题目分析,按照题目要求来选择采用了可编程并行接口芯片80C51,并通过合理布线以及编写程序最终达到了题目的要求的水塔水位控制电路的设计,设计结果基本符合课题要求。
8、总结与体会本次课程设计历时一个周,通过与同学的交流合作以及老师的指导帮助,我最终顺利完成了本次课程设计。
通过本次课程设计,我进一步熟悉和掌握了可编程并行接口芯片80C51功能和使用。
在设计过程中,芯片的引脚的连接是很重要的一项,而我在连接芯片的各引脚时出了很多的错误,但是在老师的指导下、在查阅各参考文献后这些错误都一一得到了改正,最终完成了合理的布线。
在程序编写方面,本次课程设计中的程序是我第一次尝试完成一个完整的程序,以前都是编写一些初始化程序、中断子程序的程序段,不用考虑各段程序之间的连接和组织。
在整个程序的编写过程中,错误的出现是不可避免的,但是,通过向老师答疑、和同学们探讨以及参考实验指导书等文献资料,问题也慢慢得到了解决,最终完成了各芯片的初始化编程、延时子程序的编程以及各程序段的组织,从而完成了整个程序的编写。
9、参考文献[1]:史新福、冯萍主编;32位微型计算机原理接口技术及其应用;清华大学出版社;2007年1月- 5 -[2]:朱定华主编;微机原理、汇编与接口技术试验教程;清华大学出版社;2007年4月[3]:王晓明等主编;微机应用系统设计;兰州大学出版社;2001年[4]:米根锁主编;微机原理与接口技术;兰州大学出版社;2000年- 6 -10、附录附录140个引脚大致可分为4类:电源(2)、时钟(2)、控制(4)和I/O引脚(32)(1)主电源引脚Vss和Vcc① Vss接地② Vcc正常操作时为+5伏电源(2)外接晶振引脚XTAL1和XTAL2(18/19引脚)① XTAL1内部振荡电路反相放大器的输入端,是外接晶体的一个引脚。
当采用外部振荡器时,此引脚接地。
② XTAL2内部振荡电路反相放大器的输出端。
是外接晶体的另一端。
当采用外部振荡器时,此引脚接外部振荡源。
- 7 -(3)控制或与其它电源复用引脚RST,ALE/PROG ,PSEN 和 EA/Vpp(9/30/29/31引脚)① RST 当振荡器运行时,在此引脚上出现两个机器周期的高电平(由低到高跳变),将使单片机复位。
在Vcc掉电期间,此引脚可接上备用电源,由VPD向内部提供备用电源,以保持内部RAM中的数据。
②ALE/PROG 正常操作时为ALE功能(允许地址锁存)提供把地址的低字节锁存到外部锁存器,ALE 引脚以不变的频率(振荡器频率的)周期性地发出正脉冲信号。
因此,它可用作对外输出的时钟,或用于定时目的。
但要注意,每当访问外部数据存储器时,将跳过一个ALE脉冲,ALE 端可以驱动(吸收或输出电流)八个LSTTL电路。
对于EPROM型单片机,在EPROM编程期间,此引脚接收编程脉冲(功能)③外部程序存储器读选通信号输出端,在从外部程序存储取指令(或数据)期间,在每个机器周期内两次有效。
同样可以驱动八LSTTL输入。
④ EA/Vpp ,Vpp为内部程序存储器和外部程序存储器选择端。
当 EA为高电平时,访问内部程序存储器,当 EA 为低电平时,则访问外部程序存储器。
(4)80C51共有4个8位并行I/O端口:P0、P1、P2、P3口,共32个引脚。
P3口还具有第二功能,用于特殊信号输入输出和控制信号(属控制总线)。
对于EPROM型单片机,在EPROM编程期间,此引脚上加21伏EPROM编程电源(Vpp)。
附录2技术参数:1. 9V直流电压供电;2. 水泵1个;3. 万能板一块,规格为12cm*18cm;4. 4K7欧电阻2个,51欧电阻1个;5. 二极管1个;6. 三极管1个,型号SBD50;7. 继电器1个,型号SRD-09VDC-SL-C;8. 光电耦合器1个,型号4N25813Q;9. 导线若干。
附录3源程序ORG 0000H- 8 -AJMP LOOPORG 0030HLOOP: ORL P1,#03H ;P1口置数,为检查水位状态作准备MOV A,P1 ;读P1口输入信号JNB ACC.0,LOOP1 ;即当P1.0=0则转LOOP1JB ACC.1,LOOP2 ;当P1.1=1则转LOOP2MAIN: CALL DELAY ;调延时子10S子程序AJMP LOOPLOOP1: JNB ACC.1,LOOP3 ;当P1.1=0则转SETB P1.2 ;停电动机CLR P1.3 ;置P1.3=0,启动报警子程序ACALL LED ;调用报警子程序LOOP4: SJMP LOOP4 ;出现故障后程序进入等待状态LOOP3: CLR P1.2 ;P1.2置0,启动电动机供水AJMP MAINLOOP2 SETB P1.2 ;使P1.2=1,停止电机工作AJMP MAINDE1AY: MOV R0,#200 ;10S子程序A3: MOV R1,#100A1: MOV R2,#248A2: DJNZ R2,A2DJNZ R1,A1DJNZ R0,A3RETDE1AY1: MOV R3,#10 ;0.5S子程序A4: MOV R4,#100A5: MOV R5,#248A6: DJNZ R5,A6DJNZ R4,A5DJNZ R3,A4RETLED: CLR P1.3 ;置报警灯闪烁MOV R6,#20- 9 -F1: CPL P1.3CPL P1.7CALL DE1AY1DJN Z R6,F1SETB P1.3AJMP LOOP ;故障维修完后跳转到初始化END- 10 -。