基于MATLAB_SIMULINK实现SVPWM算法仿真
基于Simulink的三相逆变SVPWM的仿真实现(精)

Simulink 是MTALAB 最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。
在实际设计之前利用Simulink 进行仿真不仅可以降低设计成本,还能及时发现设计中存在的问题,加以改正。
本文给出了基于Simulink 的SVPWM控制策略仿真的全过程和结果。
1SVPWM 的原理介绍SVPWM ,即空间电压矢量控制法,它的主要思想[1]是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM 波,以所形成的实际磁链矢量来追踪其准确磁链圆。
传统的SPWM 方法从电源的角度出发,以生成一个可调频调压的正弦波电源,而空间电压矢量控制法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制。
相比于传统的SPWM 法,SVPWM 有如下特点[2]:1)在每个小区间虽有多次开关切换,但每次开关切换只涉及一个器件,所以开关损耗小。
2)利用电压空间矢量直接生成三相PWM 波,计算简单。
3)逆变器输出线电压基波最大值为直流侧电压,比一般的SPWM 逆变器输出电压高15%SVPWM 控制的实现[3]通常有以下几步:(1)坐标的变换三相逆变系统有三组桥臂,设a 、b 、c 分别表示三组桥臂的开关状态,上桥臂导通下桥臂关断时其值为1,反之则为0。
那么可以得到三相逆变器输出的相电压和线电压之间的关系如下:V a V b V c 22222222=V dc 2-1-1-12-1-1-1222a b 22c(1)其中,V dc 为逆变桥直流电压,令U=[a,b ,c]表示一个矢量,当a 、b 、c 分别取1或者0的时候,该矢量就有8中工作状态,分别为[0,0,0],[0,0,1],[0,1,0],[0,1,1],[1,0,0],[1,0,1],[1,1,0],[1,1,1],如果我们用U 0和U 7表示零矢量,就可以得到6个扇区,三相控制可以用一个角速度为W=2πF 的空间矢量电压U 表示,当U 遍历圆轨迹时,形成三相瞬时输出电压,理论证明,当U 落入某一扇区后,用该扇区两边界矢量和零矢量去合成U 可以得到最佳合成效果。
SVPWM控制算法MATLAB仿真
摘要随着全控型快速半导体自开关器件和智能型高速微控制芯片的发展,使得数字化PWM成为PWM控制技术发展的趋势。
但是传统的SPWM法比较适合模拟电路实现,不适应于现代电力电子技术数字化的发展趋势。
电压空间矢量脉宽调制(Space Vector Pulse Width Modulation,简称SVPWM)控制技术是一种优化了的PWM控制技术,和传统的PWM法相比,不但具有直流利用率高(比传统的SPWM 法提高了约15%),输出谐波少,控制方法简单等优点,而且易于实现数字化。
本文首先对脉宽调制技术的发展现状进行了综述,在此基础上分析了电压空间矢量脉宽调制技术的发展现状,接着对空间电压矢量脉宽调制技术(SVPWM)的基本原理进行了详细的分析和推导。
最后介绍了SVPWM的基本原理及其传统的实现算法,并通过SVPWM的算法构建了Matlab/Simulink仿真模型,仿真结果验证了该算法的正确性和可行性。
关键字:空间矢量脉宽调制;仿真;建模;算法;Matlab/SimulinkAbstractTogether with the continual development of all-controlled fast semiconductor self-turn-off devices and intelligent high speed micro-control chip, the digitized PWM is becoming the trend of PWM control technique development .However, the traditional SPWM method is more suitable for analog circuits, and the traditional SPWM can not adapt to the development trend of the digitization of the modem power and electric.Space-vector pulse width modulation (SVPWM)is a kind of superiorized PWM control technique: achieving the effective utilization of the DC supply voltage(compared with the traditional SPWM, reduced by 15.47%), having little harmonic output and the easy control method, furthermore easy to realize the digitization.The article presents the developing condition of PWM and SVPWM firstly.The theory of SVPWM is discussed in detail.Finally, the basic principle of SVPWM and the traditional algorithm are introduced, and constructing Matlab/Simulink simulation model by SVPWM algorithm .In the end, the simulation on results verifies the correctness and feasibility of the algorithm.Keywords:svpwm;simulation;modeling;algorithm;Matlab/Simulink目录摘 要 (1)Abstract (2)目录 (3)第一章 概述 (4)1.1 MA TLAB 动态仿真工具SIMULINK 简介 (4)1.2 SVPWM 的控制算法 (5)1.3 参考电压矢量ref U 所处扇区N 的判断 (7)第二章 SVPWM 控制算法分析 (10)2.1 常规SVPWM 模式下,计算Y X T T , (10)2.2计算A ,B ,C 三相相应的开关时间321,,cm cm cm T T T (12)第三章 SVPWM 的SIMULINK 实现 (13)3.1SVPWM 控制算法原理图 (13)第四章 SVPWM 的SIMULINK 仿真结果 (18)4.1 波形图 (18)总 结 (20)参考文献 (21)第一章概述1.1 MATLAB动态仿真工具SIMULINK简介随着控制理论和控制系统的迅速发展,对控制效果的要求越来越高,控制算法也越来越复杂,因而控制器的设计也越来越困难。
基于simulink的SVPWM仿真
摘要:介绍了电压空间矢量脉宽调制(SVPWM)的基本原理,详细阐述了在仿真软件MATLAB/SIMULINK环境下实现SVPWM的方法,最后给出了仿真实验结果。
关键词: SVPWM; SIMULINK; MATLAB仿真Simulation of SVPWM based on SIMULINK Abstract:The basic principle of space-vector pulse width modulation is introduced and its arithmetic is presented in detail. The arithmetic is simulated by SIMULINK in MATLAB and the result is also given. Key words:SVPWM; SIMULINK; MATLAB simulationMATLAB是美国Math Works公司的产品,是一个高级数值分析、处理与计算的软件。
SIMULINK是MATLAB的进一步扩展,比传统的仿真软件更直观和方便其最为显著的特点是具有控制系统模型图形组态输入与仿真功能,只需在图形窗口画出所需分析、设计的控制系统方框图,软件本身就能对模型系统进行线性化处理和动态仿真。
采用SIMULINK仿真方法对SVPWM进行辅助设计,可通过计算机修改参数,直到获得理想的特性为止。
通过仿真研究,实现优化设计,这对高性能的变频调速系统具有一定的应用价值和现实意义。
电压空间矢量控制技术是把逆变器和交流电动机视为一体,以圆形旋转磁场为目标来控制逆变器的工作,磁链轨迹的控制是通过交替使用不同的电压空间矢量实现的。
目录摘要第1章 SVPWM的基本原理 (1)第2章SVPWM方法的算法 (3)2.1 扇区判断的算法 (3)2.2 扇区内矢量作用时间的算法 (3)2.3矢量切换点的算法 (7)第3章 SVPWM的SIMULINK仿真 (8)3.1SVPWM的各仿真模块 (8)3.2 3s/2s变换仿真的实现 (13)设计心得 (16)参考文献 (17)第1章 SVPWM 的基本原理SVPWM 实际是对应三相电压源逆变器功率器件的一种特殊的开关触发顺序和脉宽大小的组合。
基于Matlab_Simulink的SVPWM控制技术的仿真

第26卷第3期电站系统工程V ol.26 No.3 2010年5月Power System Engineering 56 文章编号:1005-006X(2010)03-0056-02基于Matlab/Simulink的SVPWM控制技术的仿真Simulation of SVPWM Control Technology based on Matlab/Simulink哈尔滨电站工程有限责任公司张进兴空间矢量PWM控制策略早在20世纪80年代初针对交流电动机变频驱动而提出,其主要思路在于抛弃了原有的正弦波脉宽调制(SPWM),而采用逆变器空间电压矢量的切换以获得准圆形旋转磁场,从而在不高的开关频率(1~3 kHz)条件下,使交流电动机获得了较SPWM控制更好的性能,主要表现在:SVPWM提高了电压型逆变器的电压利用率和电动机的动态响应性能,同时还减小了电动机的转矩脉动等。
另外,简单的矢量模式切换更易于单片微处理器的实现。
这种SVPWM控制之所以能改进SPWM驱动交流电动机时的不足,其关键在于SVPWM更加直接地控制了交流电动机的旋转磁场,虽然SVPWM不输出三相平衡PWM波形.但它不仅在静态,甚至在暂态期间都能形成准圆形旋转磁场。
而常规的SPWM则将控制重点集中在波形的改进上,以至在不高的开关频率条件下,难以产生较为完善的正弦波电压,即使开关频率较高,由于电压型变流器固有的开关死区延时,从而降低了电压利用率,甚至使波形畸变,因而难以获得更为满意的交流电动机驱动性能。
将SVPWM应用于VSR控制之中,主要继承了SVPWM电压利用率高、动态响应快等优点,目前应用于VSR的SVPWM技术主要是利用同步旋转坐标系(d,q)中电流调节器输出的空间电压矢量指令,再采用SVPWM使VSR的空间电压矢量跟踪电压矢量指令,从而达到电流控制的目的。
1 电压空间矢量脉宽调制(SVPWM)原理三相VSR不同开关组合时的交流侧电压可以用一个模为2Vdc/3的空间电压矢量在复平面上表示出来,由于三相VSR开关的有限组合,因而其空间电压矢量只有23=8种状态,如图所示。
SVPWM控制算法MATLAB仿真
摘要随着全控型快速半导体自开关器件和智能型高速微控制芯片的发展,使得数字化PWM成为PWM控制技术发展的趋势。
但是传统的SPWM法比较适合模拟电路实现,不适应于现代电力电子技术数字化的发展趋势。
电压空间矢量脉宽调制(Space Vector Pulse Width Modulation,简称SVPWM)控制技术是一种优化了的PWM控制技术,和传统的PWM法相比,不但具有直流利用率高(比传统的SPWM 法提高了约15%),输出谐波少,控制方法简单等优点,而且易于实现数字化。
本文首先对脉宽调制技术的发展现状进行了综述,在此基础上分析了电压空间矢量脉宽调制技术的发展现状,接着对空间电压矢量脉宽调制技术(SVPWM)的基本原理进行了详细的分析和推导。
最后介绍了SVPWM的基本原理及其传统的实现算法,并通过SVPWM的算法构建了Matlab/Simulink仿真模型,仿真结果验证了该算法的正确性和可行性。
关键字:空间矢量脉宽调制;仿真;建模;算法;Matlab/SimulinkAbstractTogether with the continual development of all-controlled fast semiconductor self-turn-off devices and intelligent high speed micro-control chip, the digitized PWM is becoming the trend of PWM control technique development .However, the traditional SPWM method is more suitable for analog circuits, and the traditional SPWM can not adapt to the development trend of the digitization of the modem power and electric.Space-vector pulse width modulation (SVPWM)is a kind of superiorized PWM control technique: achieving the effective utilization of the DC supply voltage(compared with the traditional SPWM, reduced by 15.47%), having little harmonic output and the easy control method, furthermore easy to realize the digitization.The article presents the developing condition of PWM and SVPWM firstly.The theory of SVPWM is discussed in detail.Finally, the basic principle of SVPWM and the traditional algorithm are introduced, and constructing Matlab/Simulink simulation model by SVPWM algorithm .In the end, the simulation on results verifies the correctness and feasibility of the algorithm.Keywords:svpwm;simulation;modeling;algorithm;Matlab/Simulink目录摘 要 (1)Abstract (2)目录 (3)第一章 概述 (4)1.1 MA TLAB 动态仿真工具SIMULINK 简介 (4)1.2 SVPWM 的控制算法 (5)1.3 参考电压矢量ref U 所处扇区N 的判断 (7)第二章 SVPWM 控制算法分析 (10)2.1 常规SVPWM 模式下,计算Y X T T , (10)2.2计算A ,B ,C 三相相应的开关时间321,,cm cm cm T T T (12)第三章 SVPWM 的SIMULINK 实现 (13)3.1SVPWM 控制算法原理图 (13)第四章 SVPWM 的SIMULINK 仿真结果 (18)4.1 波形图 (18)总 结 (20)参考文献 (21)第一章概述1.1 MATLAB动态仿真工具SIMULINK简介随着控制理论和控制系统的迅速发展,对控制效果的要求越来越高,控制算法也越来越复杂,因而控制器的设计也越来越困难。
SVPWM 控制算法的MATLAB仿真

SVPWM 控制算法的MATLAB仿真摘要空间矢量脉宽调制技术(SVPWM)比普通的SPWM调制谐波分量小,容易数字化实现。
在交流传动领域得到了广泛的应用,并逐渐应用到大容量高电压领域。
本文介绍了SVPWM的基本原理及其实现算法。
并对SVPWM算法构建了Matlab/Simulink仿真模型,仿真结果验证了该算法的正确性和可行性。
关键词:空间矢量脉宽调制,仿真,建模,算法The MATLAB simulation of SVPWM control algorithmABSTRACTThe space voltage vector PWM (SVPWM) technology can realize digitization more easily than normal SPWM.So it is used widely,and extends to high-voltage and large-capacity fields gradual-Iv.This paper introduces the basic principle of pulse width modulation based on voltage space vectors andrealization algorithm.Moreover,the algorithm is simulated in MATLAB/SIMULlNK and provides the results of simulation.KEY WORDS:SVPWM,simulation,modeling,algorithm目录前言................................................................................................................................第一章电压空间矢量控制原理..........................................................................第二章SVPWM的算法..............................................................................................2.1 判断矢量Vref所处扇区....................................................................2. 2 计算X、Y、Z和Tx、Ty...................................................................2. 3 计算矢量切换点Tcml、Tcm2、Tcm3.............................................第三章SVPWM的MATLAB仿真............................................................................第四章SIMULINK 仿真结果................................................................................结束语...........................................................................................................................参考文献......................................................................................................................致谢................................................................................................................................前言2O世纪7O年代德国学者Blaschke等人提出了矢量变换控制的思想。
SVPWM的研究和MATLAB仿真

SVPWM的研究和MA TLAB仿真摘要:以电机基础理论为出发点,针对SPWM电压利用率低,谐波多和一般空间电压矢量SVPWM(space vector pulse width modulation)结构模糊复杂的缺点,本文通过用MA TLAB/simulink平台自行设计的模块,搭建了整套SVPWM系统,并且通过仿真验证了整套系统的正确性和简单易行。
关键词:空间电压矢量SVPWM SPWM MA TLAB1引言:随着微电子技术和电力电子技术的迅速发展,交流电机在数字控制领域越来越被广泛的应用。
传统的脉宽调制方法数字化实现比较困难,以及SPWM脉宽调制技术电压利用率低和谐波多等缺点在交流电机调速方面一直未能取得满意的结果。
然而空间电压矢量脉宽调制(SVPWM)的出现很好的解决了上述问题。
但是目前所普遍采用的SVPWM结构模糊复杂等不足,让人难以理解其实现过程。
本文通过用MA TLAB/SIMULINK软件平台自行设计的模块,搭建了整套SVPWM系统,并且通过仿真验证了整套系统的正确性和简单易行。
2.1SVPWM系统设计系统构成分为四个部分,第一个模块部分是扇区模块,主要计算基础合成矢量所在的扇区。
第二模块部分为基础合成矢量作用时间模块,主要计算基础合成矢量的作用时间。
第三模块部分为时间顺序模块,主要对不同合成矢量的作用顺序进行组合。
第四模块部分为调制部分,主要对前端模块所生成的波形进行PWM调制,按一定频率产生一系列占空比不等的脉冲波。
系统的总体框图如图1所示。
图1 系统总体框图经过前级clark变换后得到两相正交的正弦信号,同时输入扇区计算模块和基础合成矢量持续时间模块。
经过扇区计算模块后,把其计算得到的扇区值输入到基础合成矢量持续时间模块,经过计算便可得到不同合成矢量所持续的时间,然后将其时间值输入到时间顺序模块,通过组合计算,输出合成矢量作用时间的波形。
2.1 扇区模块的算法,由给定输入的Uα,Uβ确定电压矢量所在扇区。
基于Simulink的三相逆变SVPWM的仿真实现(精)
Simulink 是MTALAB 最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。
在实际设计之前利用Simulink 进行仿真不仅可以降低设计成本,还能及时发现设计中存在的问题,加以改正。
本文给出了基于Simulink 的SVPWM控制策略仿真的全过程和结果。
1SVPWM 的原理介绍SVPWM ,即空间电压矢量控制法,它的主要思想[1]是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM 波,以所形成的实际磁链矢量来追踪其准确磁链圆。
传统的SPWM 方法从电源的角度出发,以生成一个可调频调压的正弦波电源,而空间电压矢量控制法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制。
相比于传统的SPWM 法,SVPWM 有如下特点[2]:1)在每个小区间虽有多次开关切换,但每次开关切换只涉及一个器件,所以开关损耗小。
2)利用电压空间矢量直接生成三相PWM 波,计算简单。
3)逆变器输出线电压基波最大值为直流侧电压,比一般的SPWM 逆变器输出电压高15%SVPWM 控制的实现[3]通常有以下几步:(1)坐标的变换三相逆变系统有三组桥臂,设a 、b 、c 分别表示三组桥臂的开关状态,上桥臂导通下桥臂关断时其值为1,反之则为0。
那么可以得到三相逆变器输出的相电压和线电压之间的关系如下:V a V b V c 22222222=V dc 2-1-1-12-1-1-1222a b 22c(1)其中,V dc 为逆变桥直流电压,令U=[a,b ,c]表示一个矢量,当a 、b 、c 分别取1或者0的时候,该矢量就有8中工作状态,分别为[0,0,0],[0,0,1],[0,1,0],[0,1,1],[1,0,0],[1,0,1],[1,1,0],[1,1,1],如果我们用U 0和U 7表示零矢量,就可以得到6个扇区,三相控制可以用一个角速度为W=2πF 的空间矢量电压U 表示,当U 遍历圆轨迹时,形成三相瞬时输出电压,理论证明,当U 落入某一扇区后,用该扇区两边界矢量和零矢量去合成U 可以得到最佳合成效果。
svpwm的MATLAB仿真实现

svpwm的MATLAB仿真实现步骤1:打开matlab主界面,然后在command window界面中的“>>”旁边输入simulink,打开simulink开发环境后新建一个mdl文件,在simulink下拉菜单中的ports&subsystems中找到subsystem模块,用其建立一个如图1的总的模块,这个模块有两个输入口,一个输出口(实际上包含六路PWM信号),接来的东西都将在这个模块中添加,输入输出模块的名称可以在双击模块后自己更改,其中Vahar,Vbetar是需要输出的电压在两相静止坐标系下的两个分量,输出是控制逆变器六个IGBT的pwm脉冲信号。
图1也许有人会问,输入参数不是还包括直流电压和功率开关频率吗?别急,下面接着让您看到上述模块的内部情况步骤2:根据图2,添加subsystem的内核模块,里面用到的模块有以下几种:in,out,mux,demux,repeating sequence,rational operator,logical operator和里面的主角S-Function builder模块。
图2可以看到输入有四个参数Vapha,Vbeta,Tz,Vdc,输出为六路PWM信号,这个仿真模块没考虑死区的问题;取Tz为1/(1e+4)这就是说开个频率是10kHz,Vdc为500,这两个参数要根据实际情况自己设置,这里是我任意设的,repeating sequence的设置如图3所示,这样设的目的是想产生一个周期为Tz,峰值为Tz/2的等腰直角三角形调制波,接下来设置两个比较模块和取反模块,比较模块是大于等于关系,各模块的其他参数,我没说的就当默认设置,细心的读者会在图4中的第一幅图中看到仿真时间设为Ts,这是我设的系统仿真步长,这里就用默认值—1,此外比较模块和取反模块的信号属性signal atrributes均应设为Boolean格式。
图3图4步骤3:设置s—builder模块,这个设置也很简单,但是看起来有点多,图2中的svpwm模块就是用simulink中的s—function builder建立的,只是名字改成svpwm罢了,有图2可以看出svpwm产生的三个时间比较值与repeating sequence产生的等腰三角波进行比较,从而产生想要的六路PWM波,svpwm的核心算法是使用C语言编写的,下面详细介绍该模块的设置,s—fanction builder的界面如下图:图5在s-function name 中输入svpwm,如果你把我下面说的设置完后,再按一下s-function name 旁边的build,接着就会在matlab的显示路径文件夹中(如“我的文档/matlab”)产生几个格式各异的以svpwm开头的文件,如svpwm。
基于matlab的三相三电平逆变器SVPWM算法
∙基于matlab的三相三电平逆变器SVPWM算法∙2010-11-11 10:00:00 来源:中国自动化网浏览:199 网友评论条点击查看摘要:本文介绍了二极管中点箝位式三电平电压型逆变器为主电路的逆变装置,详细分析了三相三电平逆变器SVPWM传统算法的原理,详细阐述了SVPWM波形发生的方法,在Matlab/simulink里以三电平逆变器为对象进行了仿真分析。
仿真结果与二电平进行了比较,结果证实了三电平控制方法的有效性和模型的正确性,为三电平逆变器的研究提供了一个有效的参考。
伴随着高速列车的引进,我国铁路事业进入了高速时代,其中对CRH2机车关键技术的研究已经有突破性进展。
该车上的变频装置属于大容量、高电压变频装置,由于目前的单管容量以及传统的两电平的控制方式均无法满足应用要求,于是采用三电平控制器,三电平可以使开关器件承受的压降降低、改善输出波形的波形质量、减小逆变器和负载收到的冲击等优点,采用在高速列车动车组上。
所谓三电平每相桥臂由4个电力电子开关器件串联组成,直流回路中性点0(其电位为零)由2个箝位二级管引出,分别接到上、下桥臂的中间,这样,每个电力电子开关器件的耐压值可降低一半,故结构更适合于中压大功率交流传动控制,这也是目前广泛应用的拓扑结构。
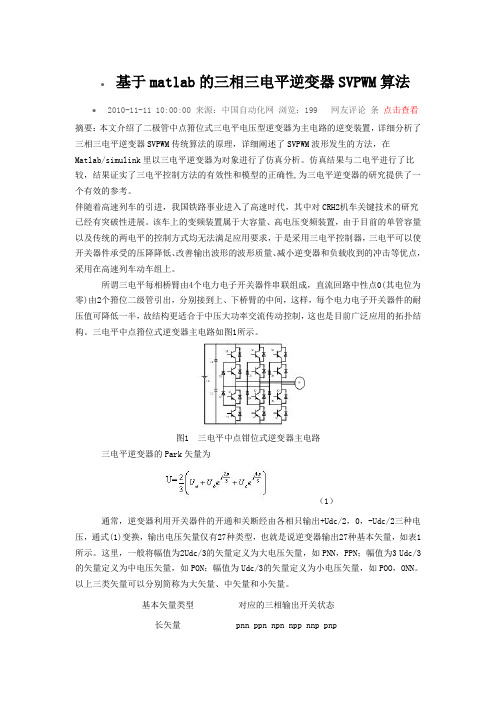
三电平中点箝位式逆变器主电路如图1所示。
图1 三电平中点钳位式逆变器主电路三电平逆变器的Park矢量为(1)通常,逆变器利用开关器件的开通和关断经由各相只输出+Udc/2,0,-Udc/2三种电压,通式(1)变换,输出电压矢量仅有27种类型,也就是说逆变器输出27种基本矢量,如表1所示。
这里,一般将幅值为2Udc/3的矢量定义为大电压矢量,如PNN,PPN;幅值为3 Udc/3的矢量定义为中电压矢量,如PON;幅值为Udc/3的矢量定义为小电压矢量,如POO,ONN。
以上三类矢量可以分别简称为大矢量、中矢量和小矢量。
基本矢量类型对应的三相输出开关状态长矢量pnn ppn npn npp nnp pnp中矢量Pop opn npo nop onp pno短矢量Poo onn ppo oon opo nonOpp noo opp noo pop non零矢量Ppp ooo nnn表1 三电平矢量表为了实现三电平逆变器的SVPWM控制,在每个采样周期内,应分为一下三个步骤: (l)区域判断。
SVPWM算法理解、Simulink仿真及程序编写
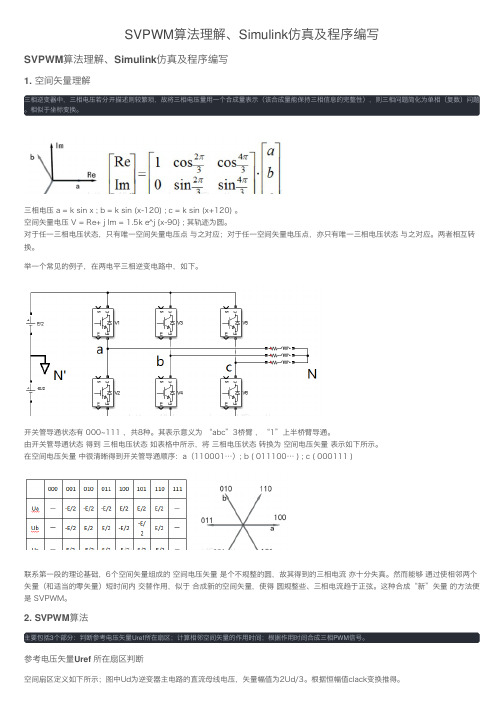
SVPWM算法理解、Simulink仿真及程序编写SVPWM算法理解、Simulink仿真及程序编写1. 空间⽮量理解三相逆变器中,三相电压若分开描述则较繁琐,故将三相电压量⽤⼀个合成量表⽰(该合成量能保持三相信息的完整性),则三相问题简化为单相(复数)问题。
相似于坐标变换。
三相电压 a = k sin x ; b = k sin (x-120) ; c = k sin (x+120) 。
空间⽮量电压 V = Re+ j Im = 1.5k e^j {x-90} ; 其轨迹为圆。
对于任⼀三相电压状态,只有唯⼀空间⽮量电压点 与之对应;对于任⼀空间⽮量电压点,亦只有唯⼀三相电压状态 与之对应。
两者相互转换。
举⼀个常见的例⼦,在两电平三相逆变电路中,如下。
开关管导通状态有 000~111 ,共8种。
其表⽰意义为 “abc”3桥臂 ,“1”上半桥臂导通。
由开关管导通状态 得到 三相电压状态 如表格中所⽰,将 三相电压状态 转换为 空间电压⽮量 表⽰如下所⽰。
在空间电压⽮量 中很清晰得到开关管导通顺序:a(110001…); b ( 011100… ) ; c ( 000111 )联系第⼀段的理论基础,6个空间⽮量组成的 空间电压⽮量 是个不规整的圆,故其得到的三相电流 亦⼗分失真。
然⽽能够 通过使相邻两个⽮量(和适当的零⽮量)短时间内 交替作⽤,似于 合成新的空间⽮量,使得 圆规整些、三相电流趋于正弦。
这种合成“新”⽮量 的⽅法便是 SVPWM。
2. SVPWM算法主要包括3个部分:判断参考电压⽮量Uref所在扇区;计算相邻空间⽮量的作⽤时间;根据作⽤时间合成三相PWM信号。
参考电压⽮量Uref 所在扇区判断空间扇区定义如下所⽰;图中Ud为逆变器主电路的直流母线电压,⽮量幅值为2Ud/3。
根据恒幅值clack变换推得。
计算相邻两电压空间⽮量的作⽤时间根据作⽤时间合成三相PWM信号3. Simulink 仿真采⽤恒幅值变换将 三相变换为两相 作为svpwm1程序的输⼊;余下2输⼊分别为 采样时间和直流侧母线电压;svpwm1输出的调制信号经三⾓载波调制后输出的PWM波B点电势B相负载上的电压、电流波形。
基于Matlab的三电平逆变器SVPWM算法设计

3
V=
2 (Va + αVb + α 2Vc )(α = e j 2π 3 ) 3
这一思想也可以用来分析三相逆变器供电时异步电机气隙中磁通矢量的运行轨迹。设 此时逆变器输出端电压为 Vao , Vbo , Vco ,电机上的相电压为 VaN , VbN , VcN ,电机中性点 对逆变器参考点电压为 VNo ,也就是零序电压。这里 N 为电机中性点,o 为逆变器直流侧零 电位参考点,此时,前述电机的定子电压空间矢量为 Vs = 2 2 (VaN + αVbN + α 2VcN ) = (Vao + αVbo + α 2Vco ) = Vsα + jVsβ 3 3
其中, S x = 1 ,第 x 相输出电平 p; S x = 0 ,第 x 相输出电平 o,这里 x 为 a、b 或 c; , 第 x 相输出电平 n。 因此,三相三电平逆变器就可以输出 33 = 27 种电压状态组合,对应 27 组不同的逆变 器开关状态。此时,仍定义电压空间矢量为 V 1 V (k ) = Vdc ( Sa + α Sb + α 2 Sc ) = dc [(2 Sa − Sb − Sc ) + j 3( Sb − Sc )] 3 6 则在 α − β 平面上,三电平逆变器 27 组开关状态所对应的空间矢量如图 2-1 所示。图 中标出了不同开关状态组合和空间矢量的对应关系,如其中 pon 表示 a、b、c 三相输出对 应的开关状态为正、零、负。另外可以看出,同一电压矢量可以对应不同的开关状态,越 往内层,对应的冗余开关状态越多。从最外层的六边形向里每进一层,矢量对应的开关状 态冗余度增加 1,例如最外层的长矢量及中矢量冗余度为 1,即只有一个对应的开关状态; 短矢量的冗余度为 2,最里层的零矢量的冗余度为 3。因此, α − β 平面上的 27 组开关状 态实际上只对应着 19 个空间矢量,这些矢量被称为三电平逆变器的基本空间矢量,简称
基于MATLAB/Simulink的电压空间矢量脉宽调制(SVPWM)逆变器的仿真

基于MATLAB/Simulink的电压空间矢量脉宽调制(SVPWM)逆变器的仿真基于MATLAB,Simulink的电压空间矢量脉宽调制(SVPWM)逆变器的仿真 .32-2001年第4期《电机电器技术》?计算机与自动控制?基于MATLAB/Simulink的电压空间矢量脉宽调制(SVPWM)逆变器的仿真王潞钢,陈林康(广东工业大学,广州510090)摘要:介绍了电压空间矢量脉宽调制(SVPWb1)技术,并对恒压频比且为同步调制时的SVpWbl,进行了细致的推导.最后详细讨论了如何用MATLAB中的 Simulink进行仿真的具体步骤.关键词:逆变器;电压空间矢量脉宽调制;仿真SVPWMInverterSireulationBasedon MATLAB/SimulinkWANGLa—gang,CHENLin—kAbstract:1KspaperintroducesthespacevectorPwM(SVPWM),anddeducesitwhen theoutputfrequencyisproportionaltothelinevoltageandthemodulafonissynchr o— nized.ThesimulationbySimulinkinMATLABisdiscussedindetail.Keywords:inve~ion;SVPWM;shm~fion 中图分类号:TP391.9文献标识码:A 1引言作为电力电子装置的核心技术,PWM技术被广泛地应用于变频调速电气传动中.技术中应用最为普遍的是正弦脉宽调制(SPW'M)和电压空间矢量脉宽调制(SVP.WM)相比SPWM而言,SVP~'2d具有更低的高次谐波和电压利用率高等优点,所以越来越受到人们的重视.在控制系统通用计算机仿真软件中, MathWorks公司的MATLAB软件最为流行. 它的Simulink工具箱是一种优秀的仿真软件,具有模块化,可重载,可封装,面向结构图编程以及高度可视化等特性.其最为显着的特点是,具有控制系统模型图形组态输入与仿真功能,只需在图形窗口画出所需分析,设计的控制系统方框图,软件本身就能对模型系统进行线性化处理与仿真.这一特点使得一个非常复杂系统的仿真建模变得相当容易. 文章编号:1004—0056[2001)04—0032一OO4 值得指出的是,M丑.AB/SimL1link具有开放的编程环境,它允许用户开发自己所需的模块, 可通过S—function模块和MATKM3提供的模板,用ICt,a2XAB或c语言程序来编出用户需要的复杂算法,比如SVPWM的算法. 28个空间矢量三相电压源逆变器可由图l所表示的6 个开关元件来等效表示.逆变器桥臂的上下开关元件在任何一时刻不能同时导通.不考虑死区时,上下桥臂的开关呈互逆状态. 圉1三相电压源逆变器模型u,v,W为输出的三相电压,以图l所示.计算机与自动控制?《电机电器技术》2001年第4期?33?1]刈2磁链空间矢量空间矢量的幅值为:当?为零矢量~-~,-(ooo)与?(111) 时.I?l-0当?为其余的六种有效矢量时j~-~,-j?亏??亏udcT空间矢量的空间位置如图2所示,两相邻有效矢量的夹角为60~.3电压空间矢量脉宽调制《SVPWM) 当三相电动机由三相对称余弦波电压供电时,根据文献1可知,磁链为一顺时针旋转的圆形,起始点在如图2所示的q轴的负方向,半径I{0==ul/~o(1)其中u为线电压,m为角速度.3.1有效矢量的空间分配图q轴负方向为旋转起点,顺时针旋转, 可得出六种有效矢量对应的空间分配图,如图3所示.在磁链空间中,每60.范围内由图 3所示的两种相邻有效矢量线性合成SVP- WM氨AlP…(i0n1/\础AlP"./\O.0}},/?,010)0l1)011)001)图3有效矢量的空间分配圈3.2空间矢量作用时间的推导图4如图4所示,在0.一60.空间范围内,例取,矢量?(100),m矢量?(110),则Tf 为矢量,作用时间,为矢量m作用时间. 本例中,设0为磁链旋转起点所对应的角度,?T为磁链旋转过?0角度时所对应的时间.对三角形~.ABC,由三角形正弦定理有五吾百芒五芒.i({一中)一sin(中._m(寻)34?2001耳第4期《电机电器技术》?计算机与自动控制?其中西=0+/"0/2=+<o/',T/2面=/2uT丽=?{ITmAC一~,T/2可推导得:TkATsin({.中)(2)Tm=kA%in(~)(3)其中k=拒/udc,代人式(1j得k=42u~/Uao零矢量作用时阅To=?T—Tj—Tm,其选取原则为选取使开关变化量最小的零矢量. T0的作用点(以0表示)简单起见,如图 4所示.需要注意下一段时问AT时,用的有效矢量的顺序相反了,为m矢量,矢量(如图4所示).这两段作用时阔2?T称为一个矢量周期,开关频率fs1.3.3V/F控制且同步调制时空间矢量作用时间考虑变压变频V/F控制时,不计电压补偿,输出频率f与线电压ul为比例关系(恒压频比):f=gUl其中g为比例系数,由此可容易推出: =V~2ut一=蠹设N=fJf为载波比则k/',T=2gua=青,所由式(2),(3)j, 得:耻如(})(4)盏如(西)(5)取N为6的倍数,此肘的SVqPWM为同步调制.计算在,6o.范围肉的中值t其它范围母的计算同此):=詈专={+2+吉={莆由上可知,值的大小只与N有关.所以由式(4),(5)可推得:保持"不变.当输出频率f与U为比例关系,且为同步调制时,TI 与T的大小仅与载波比N有关.若f与'同步变化,则TI与Tm太小不变.4MATLAB仿真实现在整个MA?AB/simulink仿真过程中, 只需要三个独立的输入变量:输出频率f,同步载波比N(一定要是6的倍数),等效直流电压u这些都可以用恒值输出模块(ODD. stailt)来手工赋值,可添加一个S—function模块来编程实现当N不是6的倍数时的自动整定.仿真步骤:T1'a,取以享()为周期的单边三角渡为时向基数,如图5所示.可用MAT. LAB中的S—function模块来自行构造,例程如下:在S—function模块附带的模板中的函数functionsys=mdloutputs(t,x,u)里添加:1'1 =floor((/2));sys=t—n*2;即可实现图5的三角载波.?计算机与自动控制?《电机电器技术》2001年第4期?35?b,在一个作用周期T2完成后,按公式 (4),(5)计算_rl,的值c,用一开关变量(例如,设定onoff=0或 1)来实现:在下一段作用周期/2来临时, 做出如图5所标出的有效作用矢量顺序的自动切换.d,当时间来临时,判断上一时刻的有效输出(用状态量来保存),从而确定输出的零矢量是?(000)还是/,,-,it(111) e,每隔磁链空间印.,即N/6个_r口后,按表(1)换取一对有效矢量.此时中重新置零,则,T2,L.的值仍可按公式(4),(5)来计算.此时运行Simulink时,MA?.AB的Coin. maud窗口会提示正在使用的是离散时间解题器(dieretetimesolver).推荐使用固定步长 (fixed—step),可以估算一下,例取f=10,, =lkHz时,最小的有效矢量的持续时问为1. 6,若选用变步长(variable—step),最大步长 (maxstepsize)选用auto时,若平滑因子refine factor不是足够的大时,会出现丢失有效矢量的现象,所以固定步长虽然速度慢一些,但设定的恰当,肯定不会出现丢失有效矢量的现象.取f=2(】,N=48,图6为0,0.008秒问,开关sasbs的输出图形:S一Sb—S囝6f,若对图6的三个输出加上三个积分器,进行3—2变换后,可绘出svPwM所形成的圆形磁链轨迹.因为此时整个仿真系统是由离散系统与连续系统的合成的混合系统, 推荐在固定步长(fLxed—step)中选取odel (euler)即可.仍取f=20Hz,N=48,磁链如图 O05115225囝7g,选用静止—B建立起来的电动机等效模型,电机参数:极对数P=2,L=0.844H,Lt=086H,=0.795H,=1.2n,R=0.0312,转动惯量J=0.004k~.取f= 20Fh,N=48,g=7.6,U=700V,恒转矩负载TL=1.9Nm,可得出转速曲线图8. t)圈85结论本文对电压空间矢量调制(SVPWM)在恒压频比且为同步调制时进行了细致的推导.并详细讨论了如何用MATLAB中的 Simulink进行仿真的步骤与注意事项,所得出的SVPWM输出开关图,磁链图,转速曲线图等都与实际相吻合,具有很高的参考价值参考文献:[1]吴守箴等电气传动蚋脉宽调制技术机械工业出版杜.1995.[2]Ymarai.NewPvnnmethodforfullydigitledinvertem.IEEETRANSIA.1987[3:施阳国等语言精要厦动态仿真工具 SIMELINK.西北工,l大学出版牡1997.口。
基于MATLAB的SVPWM逆变控制系统仿真
2012 年 第 21 卷 第 1 期
计 算 机 系 统 应 用
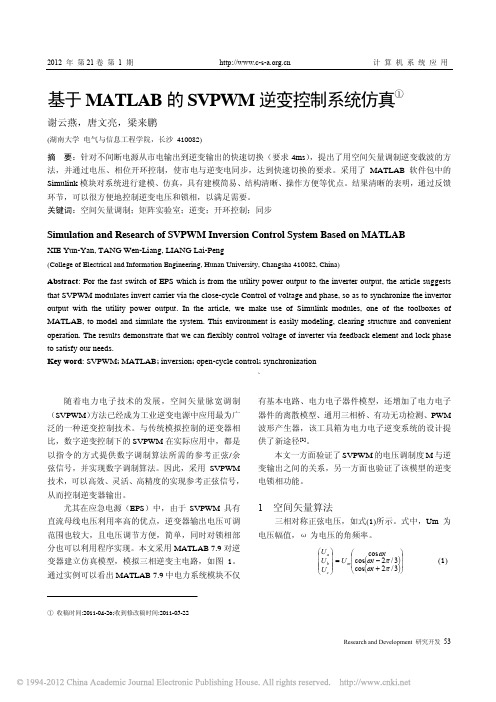
表 2 SVPWM 输出电压矢量的 7 段式组合
Ur 所在扇区 Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ Ⅵ SVPWM 的 7 段式组合 V0V1V2V7V2V1V0 V0V3V2V7V2V3V0 V0V3V4V7V4V3V0 V0V5V4V7V4V5V0 V0V5V6V7V6V5V0 V0V1V6V7V6V1V0
计 算 机 系 统 应 用
基于 MATLAB 的 SVPWM 逆变控制系统仿真①
谢云燕,唐文亮,梁来鹏
(湖南大学 电气与信息工程学院,长沙 410082)
摘
要:针对不间断电源从市电输出到逆变输出的快速切换(要求 4ms) ,提出了用空间矢量调制逆变载波的方
?????????????????????????3?3???????????r?r?1?1?k3?k3dskkuukkutttcossincossin2315先计算电压指令所在的扇区再根据表2选择恰当电压矢量然后由式5计算出各基本矢量的作用时间便可通过编程实现svpwm
2012 年 第 21 卷 第 1 期
(5)
先计算电压指令所在的扇区,再根据表 2 选择恰 当电压矢量,然后由式(5)计算出各基本矢量的作用时 间,便可通过编程实现 SVPWM。
2 用MATLAB 7.9中的电力系统模块工具箱 建立控制系统
2.1 电力系统模块工具箱 MATLAB 图形化仿真是在 SIMULINK 环境下, 电力系统工具箱在 SimPowerSystems 模块中。进入 Simulink 环境, 弹出一个标题为 SimPowerSystems 模 块库窗口,该窗口中包含电路仿真所需的各种元件模 型,包括电源模块、电力电子模块、电机模块、测量 模块以及附加功率模块等模块库[2]。 各个模块库有不同的模块选择,如电源模块库里 有电流源、直流电压源、交流电压源、受控电压源等 电源模型;电力电子模块库中包含了晶闸管、功率场 效应管、理想开关元件等功率开关元器件模型。利用 电力系统工具箱对电路进行仿真实验,只需将所需元 件模型拖入仿真窗口并设定元件参数,然后根据仿真 电路的拓扑结构,连好线路,仿真模型便生成了[2]。 因此,仿真模型的建立过程主要是对各元器件模型设
基于MATLAB的按照零矢量分散SVPWM仿真

目录1 引言 (1)2 MATHLAB简介 (2)3 SVPWM技术简介及原理 (3)3.1 SVPWM技术简介 (3)3.2 SVPWM技术原理 (3)4 SVPWM的算法实现 (6)4.1 由三相电压到两相静止电压变换的实现 (6)4.2 扇区判断 (7)4.3矢量作用时间 (10)4.4 矢量切换点时间计算 (14)4.5 零矢量分散的SVPWM实现法 (14)4.6输入的三角载波 (17)4.7零矢量分散法得到的SVPWM波形图 (17)4.8 开关选择模块 (18)5 总结语 (19)参考文献 (20)附录 (21)1 引言近年来,伴随着计算机技术的发展以及新型快速的电力电子元器件的产生,SPWM脉宽调制技术的应用越来越广泛。
传统的脉宽调制方法数字化实现比较困难,以及SPWM脉宽调制技术电压利用率低和谐波多等缺点在交流电机调速方面一直未能取得满意的结果。
然而空间电压矢量脉宽调制(SVPWM)的出现很好的解决了上述问题。
但是目前所普遍采用的SVPWM结构模糊复杂等不足,让人难以理解其实现过程。
本文通过用MATLAB/SIMULINK软件平台自行设计的模块,搭建了整套SVPWM 系统,并且通过仿真验证了整套系统的正确性。
并在分析SVPWM基本原理的基础上,详细介绍了SVPWM的实现方法,并在MATHLAB/SIMULINK仿真环境中进行了仿真研究。
2 MATHLAB简介MATLAB是矩阵实验室(Matrix Laboratory)的简称。
MATLAB名字由MATrix 和 LABoratory 两词的前三个字母组合而成。
那是20世纪七十年代,时任美国新墨西哥大学计算机科学系主任的Cleve Moler出于减轻学生编程负担的动机,为学生设计了一组调用LINPACK和EISPACK矩阵软件工具包库程序的的“通俗易用”的接口,此即用FORTRAN编写的萌芽状态的MATLAB。
MATLAB是美国Mathworks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境。
基于SVPWM变频器的Matlab仿真及硬件实现
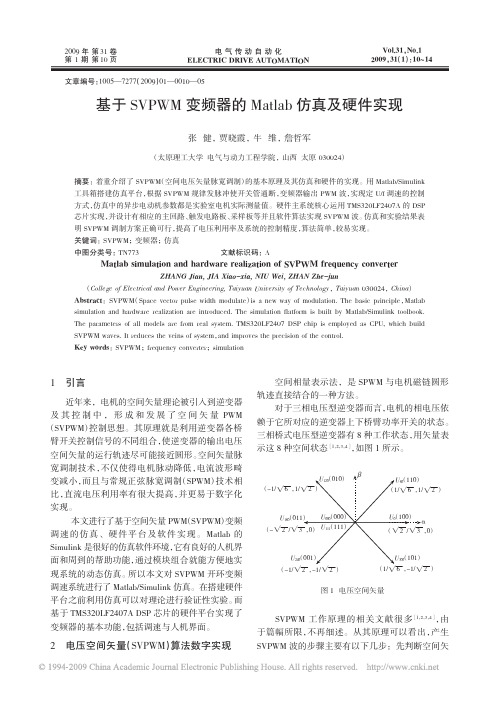
U60 (110 ) (1/ 姨 6 , 1/ 姨 2 )
U000 (000 ) U ( 111 ) 111 (- 姨 2 / 姨 3 , 0 ) U180 (011 )
α (姨 2 / 姨 3 , 0 )
U( ) 0 100
U240 (001 ) (-1/ 姨 2 , -1/ 姨 2 )
U300 (101 ) (1/ 姨 6 , -1/ 姨 2 )
Matlab simulation and hardware realization of SVPWM frequency converter
1
引言
近年来,电机的空间矢量理论被引入到逆变器 及 其 控 制 中 , 形 成 和 发 展 了 空 间 矢 量 PWM (SVPWM ) 控制思想。其原理就是利用逆变器各桥 臂开关控制信号的不同组合, 使逆变器的输出电压 空间矢量脉 空间矢量的运行轨迹尽可能接近圆形。 宽调制技术, 不仅使得电机脉动降低, 电流波形畸 ) 技术相 变减小, 而且与常规正弦脉宽调制 (SPWM 比, 直流电压利用率有很大提高, 并更易于数字化 实现。 本文进行了基于空间矢量 PWM (SVPWM ) 变频 调速 的仿真 、 硬件 平台 及 软 件 实 现 。 Matlab 的 Simulink 是很好的仿真软件环境, 它有良好的人机界 面和周到的帮助功能, 通过模块组合就能方便地实 所以本文对 SVPWM 开环变频 现系统的动态仿真。 调速系统进行了 Matlab/Simulink 仿真。在搭建硬件 平台之前利用仿真可以对理论进行验证性实验。 而 基于 TMS320LF2407A DSP 芯片的硬件平台实现了 变频器的基本功能, 包括调速与人机界面。
3 X 3 Y 3 Z
3 Ta
基于MATLAB的SVPWM算法仿真

图 2 比较值波形 5 结论 仿真是进行产品设计的重要手段。 本文用 MATLAB 的 SIMULINK ) 在仿真建模的过程中, 为了能够清晰地表现出上述的判别过程, 现 易于对 SVPWM 进行仿真实现, 模型直观, 不用编程, (下转 167 页
Á Â Â Á Â Æ Ç Å Á Á Ã Ä É Á Â Ã Â Ã Ä Å Æ Ç Å Æ Ã Â Ç È È Á Ä Â Á Â Ã
·46·
(湖北师范学院物理与电子科学学院, 湖北 黄石 435000 ) 摘 要: 介绍了电压空间矢量脉宽调制 (SVPWM ) 的基本原理, 详细阐述了在仿真软件 MATLAB 环境下实现 SVPWM 的方法, 仿真结 果验证了算法的正确性和可行性。 关键词: SVPWM; MATLAB; 动态模型; 仿真 做如下规定: 当 1 概述 “线电压≥0” 时, 记为 “1” ; 当 “线电压 <0” 时, 记为 “0” 。则 与传统的正弦波脉宽调制 (SPWM ) 相比, 空间矢量脉宽调制 (SVP- 得到如表 1 (最后一行 ) 形式的扇区判别新判据。 ) 具有线性调制范围宽、 直流电压利用率高、 输出电压谐波小和易于 WM 在表 1 中, 将每个扇区根据规定得到的三个数 (0 或 1 ) 看作一个二 数字化实现的特点[1], 然后将此二进制数转换成与之对应的十进制数, 即得到表 1 末 因而在变频调速和无功补偿等电力电子变换器应 进制数, 扇区 I 的优化判据为 (1、 1、 0 ) , 我们将其看作 用领域得到更加广泛的应用。 行的 N 值。例如根据规定, 本文首先介绍 SVPWM 的基本原理,在分析机理的基础上推导 二进制数 “110” , 然后转换成与之对应的十进制数 “6” , 即可得到表 1 末 SVPWM 算法,然后在 MATLAB—— —主要在 SIMULINK 环境下,采用 行的 N 值为 “6” 。因此, 在系统仿真模型输出 N 值时, 将得到的 N 值在 MATLAB 的 SIMULINK 仿真方法对 SVPWM 进行辅助设计, 可计算机 表 1 中即可查找出所对应的扇区编号, 从而实现扇区判别的功能。 修改系统参数, 直到获得理想的特性为止。通过仿真研究, 从而实现优 3.2 各扇区电压矢量作用时间 Tx, Ty 化设计, 这对高性能的变频调速系统具有一定的应用价值和现实意义。 当参考电压在扇区 I 时, 根据空间矢量作用等效的原则 1 2 S VP WM 的基本原理 U T U T U T 2 SVPWM 实际上是对应于三相电压源逆变器功率器件的一种特殊 ) (5 3 U T U T 的开关触发顺序和脉宽大小的组合。按一定规律来控制逆变器三对桥 2 臂晶体管的通断, 将直流侧电压变为三相正弦电压输出。因此, 三相桥 由于 U1=U2= (2/3 ) Ud, 联立式 (1 ) 、 式 (4 ) 和式 (5 ) , 得到在扇区 I 中, 式逆变电路各桥臂通断状态的组合为 6 个有效的空间矢量 U ( ) 、 U2 电压空间矢量 U1、 U2 作用时间 T1、 T2: 1 100 (110 ) 、 U( ) 、 U( ) 、 U( ) 、 U( ) 和 2 个零矢量 U( ) 、 U7 T1=TsuAB/Ud, T2=TsuBC/Ud 3 010 4 011 5 001 6 101 0 000 (111 ) 。 同理可得, 在其余各扇区电压空间矢量作用时间。 SVPWM 线性组合的控制策略就是通过合理控制两个相邻非零矢 其中, 开关周期 Ts 内的剩余时间由零电压空间矢量的作用时间 T0 量及零矢量之间的切换, 在每个开关周期内逼近旋转参考矢量 Uref, 使 来补充, 可用矢量 Uref 所在扇区边界的两个相邻 T0=Ts- Tx- Ty (6 ) 合成电压矢量的轨迹逼近圆形。 调控 Uref 3.3 逆变器开关状态切换点 Tcm1、 Tcm2、 Tcm3 特定矢量 Ux 和 Uy 及零矢量 Uz 合成一个等效的电压矢量 Uref, 的大小和相位[2]。则在时间很短的一个开关周期 Ts 中, 矢量存在时间就 为了计算空间矢量比较器切换点 Tcm1、 Tcm2、 Tcm3, 设 Uy 存在 Ty 时 Ta= (Ts- Tx- 存在 Tx 时间、 y 间以及零矢量 Uz 存在 T0 时间来等效, 即 Tb=Ta+Tx/2 (7 ) UxTx+UyTy+UzT0=UrefTs=Uref (Tx+Ty+T) ( 1 ) T =T +T / 2 0 c b y 3 S VP WM 的算法 4 S VP WM 在 MATLAB 中的建模与仿真 3.1 判断矢量 Uref 所在扇区 在 MATLAB/Simulink 仿真集成环境中建立 SVPWM 控制模块的 ) 上的相电压 uA、 uB、 uC 利用 仿真模型, 将给定的三相静止参考坐标系 (A- B- C 如图 1 所示。 Park 变换合成等效电压空间矢量