基于神经网络的复合控制算法研究
基于神经网络误差补偿的预测控制研究毕业论文

基于神经网络误差补偿的预测控制研究毕业论文目录摘要............................................... 错误!未定义书签。
1 预测控制 (2)1.1 预测控制的产生 (2)1.2 预测控制的发展 (3)1.3 预测控制算法及应用 (4)1.3.1模型控制算法(Model Algorithmic Control,MAC) (5)1.3.2动态矩阵控制(Dynamic Matrix Control,DMC) (5)1.3.3广义预测控制(Generalized Predictive Control,GPC) (5)1.3.4极点配置广义预测控制 (5)1.3.5内模控制 (5)1.3.6模糊预测控制 (6)1.4 预测控制的基本特征 (6)1.4.1预测模型 (6)1.4.2反馈校正 (6)1.4.3滚动优化 (6)1.5预测控制的现状 (7)2 神经网络 (7)2.1 人工神经网络的生理原理 (8)2.2 神经网络的特征 (10)2.3 神经网络的发展历史 (11)2.4 神经网络的内容 (12)2.5 神经网络的优越性 (14)2.6 神经网络研究方向 (14)2.7 神经网络的应用分析 (14)2.8 神经网络使用注意事项 (17)2.9 神经网络的发展趋势 (18)2.10 BP神经网络 (18)2.10.1 BP神经网络模型 (18)2.10.2 BP网络模型的缺陷分析及优化策略 (19)2.10.3 神经网络仿真 (20)3.动态矩阵控制 (22)3.1 预测模型 (22)3.2 滚动优化 (23)3.3 反馈校正 (24)3.4 有约束多变量动态矩阵控制及其线性化 (27)3.5 动态矩阵控制仿真 (29)4 基于神经网络误差补偿的预测控制 (32)4.1 研究背景 (32)4.2 传统PID控制 (33)4.2.1位置式PID控制 (33)4.2.2 增量式PID控制 (35)4.3 基于神经网络的动态矩阵控制 (37)4.4 基于神经网络输出反馈的动态矩阵控制研究 (40)4.5 基于神经网络误差补偿的动态矩阵控制 (46)4.6 仿真效果验证 (51)总结 (57)参考文献 (58)1 预测控制1.1 预测控制的产生预测控制的产生,并不是理论发展的需要,而首先是工业实践向控制提出的挑战。
基于神经网络的闭环控制学习算法
基于神经网络的闭环控制学习算法一、神经网络在闭环控制中的应用概述神经网络作为一种强大的机器学习模型,其在闭环控制系统中的应用日益广泛。
闭环控制系统,又称为反馈控制系统,是指系统输出与期望输出之间存在反馈回路的控制系统。
在这种系统中,控制算法根据系统输出与期望输出之间的误差来调整控制输入,以达到控制目标。
神经网络因其出色的非线性映射能力和自适应学习能力,在处理复杂系统和不确定性环境中显示出了巨大的潜力。
1.1 神经网络的基本原理神经网络是由大量简单的计算单元(称为神经元)组成的网络,这些神经元通过加权连接相互连接。
每个神经元接收输入信号,进行加权求和,并通过激活函数处理后输出。
通过调整神经元之间的连接权重,神经网络可以学习到输入与输出之间的复杂映射关系。
1.2 神经网络在闭环控制中的作用在闭环控制系统中,神经网络可以用于建模、预测、控制和优化等多个方面。
它可以学习系统的动态行为,预测系统的未来状态,或者直接作为控制器来调整控制输入。
此外,神经网络还可以用于处理系统的不确定性和非线性,提高系统的鲁棒性和适应性。
二、基于神经网络的闭环控制学习算法基于神经网络的闭环控制学习算法是一类利用神经网络来实现闭环控制的算法。
这些算法通过训练神经网络来学习控制策略,以实现对系统的精确控制。
以下是几种典型的基于神经网络的闭环控制学习算法:2.1 反向传播算法(Backpropagation)反向传播算法是神经网络中最常用的学习算法之一。
它通过计算网络输出与期望输出之间的误差,并将误差反向传播至网络的输入层,以此调整网络权重。
在闭环控制系统中,反向传播算法可以用来训练神经网络控制器,使其能够根据系统误差来调整控制输入。
2.2 强化学习算法(Reinforcement Learning)强化学习是一种无模型的学习算法,它通过与环境的交互来学习最优策略。
在闭环控制系统中,强化学习算法可以使神经网络控制器通过试错来学习如何控制系统,以达到最优性能。
基于神经网络的运动控制系统算法研究

Ke wo d : a a t e n u a ewo k i tr a o t 1moi n c n rl r a — i i lt n y r s d p i e r l t r n e n l c n r . t o to ,e l t v n o o me smu a i o
ቤተ መጻሕፍቲ ባይዱ
文章 编 号 10 — 3 1 (0 6 0 — 2 5 0 文 献 标 识码 A 0 2 8 3- 20 )3 0 0 — 4 中图 分 类 号 r 23 P 7
S u y o g rt m o o i n Co to y t m t d n Al o ih f r M t n r l S se o
ANNC,h te s ANNI h a i te o h r i . t e s me t At me, o o e in w l tp l gc l sr cu e a d h w t h ie f c ie tan d hw t d sg e l o o o ia t t r n o o c oc ef t r ie u e v ag rtm r ic se n o a i gu o cu i n r c u r dT e r a- i i l t n r s l h w h c n rl lo h a e d s u s d a d s me me n n f l c n l so s a e a q ie . h e l t i me s mu ai e u t s o t e o t o s o
Ba e n Ne r lNe wo k s d o u a t r
Zh u Zh p n Xi u n o i ig ・ aJ a
( a tC ia Unv ri fS in e a d T c n lg S a g a 0 2 7 E s h n iest o ce c n e h oo y,h n h i2 0 3 ) y
基于神经网络的多智能体系统协作控制技术探究

基于神经网络的多智能体系统协作控制技术探究多智能体系统是指由多个相互独立的智能体组成的复杂系统。
在现实生活中,多智能体系统已经广泛应用于机器人控制、无人机编队飞行、自动驾驶等领域。
然而,由于多智能体之间存在着相互协作与竞争的关系,如何实现多智能体系统的高效协作成为了一个具有挑战性的问题。
本文将介绍一种基于神经网络的多智能体系统协作控制技术,通过神经网络的学习与训练实现多智能体之间的协作行为。
在传统的多智能体系统中,通常使用经典的控制算法,如 PID 控制器,来实现对多智能体的控制。
然而,这种方法往往需要提前设定好控制参数,对系统的稳定性和适应性存在一定的限制。
而采用基于神经网络的多智能体系统协作控制技术,可以通过神经网络的学习与训练来实现对多智能体的控制。
神经网络是一个由多个神经元组成的网络结构,可以模拟大脑神经元之间的连接与传递。
通过对神经网络进行适当的训练,可以让多智能体系统具备学习与适应的能力,从而提高系统的协作性能。
在基于神经网络的多智能体系统中,每个智能体通过传感器获取环境信息,并通过神经网络进行信息处理与决策。
神经网络可以实时地对多智能体的行为进行调整,使得系统能够根据环境的变化做出相应的响应。
同时,多智能体之间可以通过神经网络进行信息共享与通信,实现协同工作与协作决策。
不同于传统的控制算法,基于神经网络的多智能体系统协作控制技术具有以下优点:首先,基于神经网络的多智能体系统具备较强的学习与适应能力。
通过不断的学习与优化,系统可以根据环境的变化来调整智能体的行为,从而实现更加灵活与高效的协作。
其次,基于神经网络的多智能体系统能够处理较为复杂的任务。
传统的控制算法在面对复杂任务时往往无法有效地应对,而神经网络可以通过对大量数据的学习与训练来提取任务的特征与规律,从而实现复杂任务的控制与协作。
再次,基于神经网络的多智能体系统具备较好的鲁棒性。
传统的控制算法往往对系统的变化与干扰较为敏感,而神经网络具备强大的自适应能力,可以在系统发生变化时自动进行调整与适应。
基于BP_神经网络的PID_控制算法参数优化
- 22 -高 新 技 术从本质上来看,PID 控制算法就是对比例、积分和比例微分间的关系进行控制的一种算法。
PID 控制调节器具有适应性强、鲁棒性良好的特征,因此被广泛应用于工业控制领域。
但是,随着科学技术、控制理论发展,在工业生产中被控对象逐渐向复杂化和抽象化的趋势发展,并呈现滞后性、时变性和非线性的特征,这使传统PID 控制器难以精准调控这种较复杂的控制系统。
为了解决该问题,研究人员将控制理论与其他先进的算法相结合,形成全新的控制理论,包括神经网络控制、遗传算法以及模糊控制等。
对神经网络算法来说,由于其具有较高的鲁棒性和容错性,因此适用于复杂的非线性控制系统中,并且具有广阔的应用前景和较大的发展潜力。
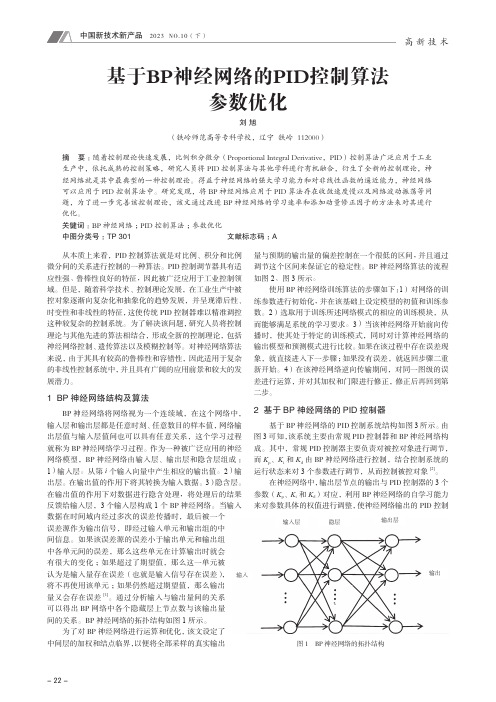
1 BP 神经网络结构及算法BP 神经网络将网络视为一个连续域,在这个网络中,输入层和输出层都是任意时刻、任意数目的样本值,网络输出层值与输入层值间也可以具有任意关系,这个学习过程就称为BP 神经网络学习过程。
作为一种被广泛应用的神经网络模型,BP 神经网络由输入层、输出层和隐含层组成:1) 输入层。
从第i 个输入向量中产生相应的输出值。
2) 输出层。
在输出值的作用下将其转换为输入数据。
3) 隐含层。
在输出值的作用下对数据进行隐含处理,将处理后的结果反馈给输入层,3个输入层构成1个BP 神经网络。
当输入数据在时间域内经过多次的误差传播时,最后被一个误差源作为输出信号,即经过输入单元和输出组的中间信息。
如果该误差源的误差小于输出单元和输出组中各单元间的误差,那么这些单元在计算输出时就会有很大的变化;如果超过了期望值,那么这一单元被认为是输入量存在误差(也就是输入信号存在误差),将不再使用该单元;如果仍然超过期望值,那么输出量又会存在误差[1]。
通过分析输入与输出量间的关系可以得出BP 网络中各个隐藏层上节点数与该输出量间的关系。
BP 神经网络的拓扑结构如图1所示。
为了对BP 神经网络进行运算和优化,该文设定了中间层的加权和结点临界,以便将全部采样的真实输出量与预期的输出量的偏差控制在一个很低的区间,并且通过调节这个区间来保证它的稳定性。
基于神经网络的自适应控制算法研究及应用

基于神经网络的自适应控制算法研究及应用近年来,神经网络在各个领域的应用越来越广泛。
其中,神经网络在自适应控制算法中的应用,成为了一个热门研究方向。
本文就基于神经网络的自适应控制算法进行研究,并探讨了其在实际应用中的优缺点及发展趋势。
一、神经网络的自适应控制算法概述神经网络自适应控制算法是指将神经网络与控制器相结合,通过对输入和输出关系进行学习和训练,使得控制器能够在不断变化的环境中自适应地改变控制策略,从而实现对被控对象的精确控制。
神经网络的自适应控制算法可以应用于各种自适应控制领域,例如机器人、航空、化工和交通等。
神经网络的自适应控制算法一般包括以下步骤:1)制定控制目标;2)选择适当的神经网络模型;3)定义反馈控制律;4)训练神经网络,并获取最优控制参数;5)应用最优控制参数实现对被控对象的精确控制。
二、神经网络的自适应控制算法应用实例神经网络的自适应控制算法已经在许多实际应用中得到了非常成功的应用。
下面主要介绍一些典型应用实例。
(1)工业过程控制神经网络的自适应控制算法可用于控制工业过程中的温度、风速、压力、液位等参数。
例如,在瓦斯检测系统中,可以通过神经网络的自适应控制算法来控制瓦斯密度和氧气浓度。
(2)机器人控制神经网络的自适应控制算法可以使机器人在不同环境中自适应地行动。
例如,在机器人视觉系统中,可以通过神经网络的自适应控制算法来快速识别环境,并根据识别结果控制机器人移动。
(3)飞行器控制神经网络的自适应控制算法可以用于飞行器的控制。
例如,在飞行控制技术中,可以通过神经网络的自适应控制算法来保持飞行器的稳定性,提高安全性。
三、优缺点及发展趋势神经网络的自适应控制算法具有以下优点:(1)适应性强:可以在多变的环境中自适应地改变控制策略,适应不同的控制环境。
(2)鲁棒性好:神经网络的自适应控制算法可以很好地应对控制环境中的噪声、干扰等因素,提高系统的鲁棒性。
(3)容错性高:神经网络的自适应控制算法可以对控制对象出现的异常情况做出有效反应,从而保证系统的稳定性。
基于神经网络的自动化控制系统设计

基于神经网络的自动化控制系统设计在当今科技飞速发展的时代,自动化控制系统在各个领域发挥着至关重要的作用,从工业生产到智能家居,从交通运输到医疗设备,其身影无处不在。
而神经网络作为一种强大的人工智能技术,为自动化控制系统的设计带来了全新的思路和方法。
神经网络,简单来说,就像是一个由大量节点(也称为神经元)相互连接而成的网络。
这些节点通过对输入的数据进行处理和学习,能够自动地发现数据中的模式和规律,并做出相应的预测或决策。
将神经网络应用于自动化控制系统,可以大大提高系统的性能和智能化水平。
在设计基于神经网络的自动化控制系统时,首先需要明确系统的目标和需求。
例如,在工业生产中,可能需要实现对生产过程的精确控制,以提高产品质量和生产效率;在智能家居中,可能需要根据用户的习惯和环境条件,自动调节室内的温度、湿度和照明等。
明确了目标和需求后,就可以选择合适的神经网络模型。
常见的神经网络模型有多层感知机(MLP)、卷积神经网络(CNN)、循环神经网络(RNN)等。
多层感知机适用于处理简单的线性和非线性问题;卷积神经网络在图像识别和处理方面表现出色;循环神经网络则擅长处理时间序列数据。
根据具体的应用场景和数据特点,选择合适的模型是至关重要的。
接下来是数据的收集和预处理。
神经网络的学习和训练需要大量的数据支持。
这些数据可以来自传感器、历史记录、实验测量等。
在收集到数据后,需要对其进行清洗、预处理和标注。
清洗数据可以去除噪声和异常值,预处理包括数据归一化、特征提取等操作,标注则是为了给数据赋予相应的标签,以便神经网络能够学习到正确的模式。
在完成数据准备后,就可以进行神经网络的训练了。
训练过程实际上是通过调整神经网络中的参数,使得网络的输出尽可能地接近真实的标签值。
这个过程需要选择合适的优化算法和损失函数。
优化算法用于更新网络参数,常见的有随机梯度下降(SGD)、Adagrad、Adadelta 等。
损失函数则用于衡量网络输出与真实标签之间的差异,常见的有均方误差(MSE)、交叉熵(Cross Entropy)等。
BP神经网络算法的改进及其在PID控制中的应用研究共3篇
BP神经网络算法的改进及其在PID控制中的应用研究共3篇BP神经网络算法的改进及其在PID控制中的应用研究1随着工业自动化的不断推进和智能化的不断发展,控制理论和算法变得越来越重要。
PID控制算法已成为现代控制中最常用的算法之一。
然而,传统的PID控制算法在某些情况下会出现一些问题,这些问题需要新的解决方案。
因此,本文将探讨BP神经网络算法的改进及其在PID控制中的应用研究。
BP神经网络是一种前向反馈神经网络,它通过反复迭代调整参数来学习训练数据,从而实现分类和回归等任务。
BP神经网络作为一种非线性动态系统,具有自适应性、非线性和强泛化能力等特点。
在控制系统中,BP神经网络可以用于模型预测、模型识别和模型控制等方面。
在控制系统中,PID控制是一种常规的线性控制技术。
然而,传统的PID控制算法存在一些问题,如难以解决非线性系统、难以控制多变量系统等。
为了解决这些问题,人们开始探索将BP神经网络用于控制系统。
BP神经网络可以通过学习训练数据来逼近未知非线性系统,从而实现对系统的控制。
在使用BP神经网络控制系统时,需要进行参数调整来保证网络的准确性和控制效果。
对于传统的BP神经网络,训练过程需要耗费大量的计算时间和计算资源。
因此,人们提出了一些改进的BP神经网络算法,如逆传播算法、快速BP算法和LM算法等。
逆传播算法是一种基于梯度下降的BP神经网络算法,该算法通过不断地调整权重和偏置来实现网络的训练。
快速BP算法是一种改进的逆传播算法,它增加了一些优化步骤,使训练过程更快速和高效。
LM算法是一种基于牛顿法的BP神经网络算法,在训练过程中可以自动调整学习率,从而提高训练的速度和准确性。
在控制系统中,BP神经网络可以用于模型预测、模型识别和模型控制等。
例如,在模型控制方面,可以使用BP神经网络来进行预测,并根据预测结果来调整控制参数,从而实现对系统的更加有效的控制。
此外,在模型识别方面,人们也可以使用BP神经网络精确地识别复杂的非线性系统,实现对系统的更加准确的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
哈尔滨理工大学学士学位论文摘要本文从实际出发,以加热炉为研究对象,对受随机因素干扰的、具有大惯性、纯滞后的非线性分布参量的随机过程进行了研究。
文中着重研究了神经网络、模糊理论和PID控制的融合方式及其可行性,介绍了一种复合式控制方案——神经网络模糊PID控制算法,并将此算法与PID控制进行了仿真比较。
结果表明,在超调量、稳态误差和抗干扰性等方面,此算法都优于传统的PID控制。
加热炉的温度控制属于典型的过程控制,因此我们首先想到的控制方案就是采用传统的比例积分微分(PID)调节器进行控制。
根据被控对象的不同,适当地调整PID参数,可以获得比较满意的控制效果。
然而,由于PID算法只是在系统模型参数为非时变的情况下,才能获得理想的效果。
当一个调整好参数的PID控制器被应用到模型参数时变系统时,系统性能会变差。
因此这种控制作用无法从根本上解决动态品质和稳态精度的矛盾。
本文所介绍的基于神经网络的复合控制算法,具有实时性强、抗干扰性好、控制精度高的优点,可应用于实际工业过程。
在模糊控制中,模糊推理相当于对一种输入输出关系的映射,输入为前提,输出经非模糊化后即为推理的结果输出。
利用神经网络的任意函数映射功能,就可以实现模糊推理,实现PID参数在线调整。
综上可见,神经网络模糊PID控制必将有广阔的应用前景。
关键词神经网络;模糊控制;PID控制;MATLABThe Research of the Composite Control Arithmetic Based on Neutral Network AbstractIn view of practical use, taking the stove as object, the thesis studies the casual process of nonlinear and distributed parameter with big inertia, pure lag and casual disturbance. The feasibility and the form of combining neural network and fuzzy theory with PID control are discussed. The theory of compound control-fuzzy-PID control based on neutral network is put forward. In addition, comparison among the compound control and the PID control is introduced. The result indicates that this control arithmetic is superior to others in aspect of overshoot, steady-state error, anti-jamming etc.The temperature control of the stove is type of process control. So the control method first coming into our mind is the conventional PID control using PID adjustor. Then satisfactory effect will come out, through adjusting the PID parameter properly for the specific object. However, we can get the ideal effect only on the condition that the parameter of the system model is time-invariant .when a parameter is used to a time-variant system, the performance will become bad. So this control can not solve the conflict between dynamic quality and static precision.The compound control arithmetic introduced in this text is based on neutral network, and has the feature of real-time, good anti-jamming, high precision. So it can be used in practical industry process. In the case of fuzzy control, fuzzy reasoning is equal to a mapping between the input and output .the input is premises, and the output fuzzed up- I -哈尔滨理工大学学士学位论文ether function. The fuzzy reasoning can be carried out and the PID parameter can be adjusted on line. Thus it can be seen that the neural-networks-fuzzy-PID control has wide application foreground without fail.Keywords neutral network; fuzzy control; PID control; MATLAB- II -哈尔滨理工大学学士学位论文摘要 (I)Abstract II第1章绪论 11.1 课题背景 11.2 自动控制的发展概况 11.3 加热炉作为研究对象的特点 1第2章模糊控制与神经网络控制原理22.1 模糊控制的基本原理 22.2 模糊控制器22.2.1 模糊控制器的组成 32.2.2 模糊条件句与模糊控制细则 42.2.3 模糊化运算 42.2.4 模糊控制中的几个基本运算操作52.2.5 数据库 62.2.6 规则库72.2.7 模糊推理92.2.8 清晰化112.3 神经网络控制的基本原理112.3.1 神经网络基础112.3.2 误差反向传播(BP)神经网络14第3章控制算法的比较183.1 单一的控制算法183.1.1 PID控制183.1.2 模糊控制193.1.3 神经网络控制203.2 新型的复合控制算法21第4章新型复合控制算法的设计224.1 神经网络模糊PID控制算法234.1.1 模糊化模块234.1.2 BP神经网络模块234.1.3 PID控制器模块264.2 被控对象264.2.1 被控对象的选择264.2.2 滞后时间的识别274.2.3 用线性辨识方法在线估计系统的预报模型27 4.3 总的控制算法28第5章控制算法的仿真及结论29- III -哈尔滨理工大学学士学位论文5.2 仿真比较295.3 仿真结论33结论34致谢34参考文献34附录35千万不要删除行尾的分节符,此行不会被打印。
在目录上点右键“更新域”,然后“更新整个目录”。
打印前,不要忘记把上面“Abstract”这一行后加一空行- IV -哈尔滨理工大学学士学位论文课题背景随着智能控制的迅速发展,特别是随着神经网络和模糊控制等理论的不断成熟,给人类生活带来了根本性的改变。
基于神经网络的复合控制算法吸收了人类对客观世界的信息处理的能力,以其很强的适应性和鲁棒性,在工业过程控制领域得到了极为广泛的应用,并已应用于家电产品,走入了我们的家居生活。
自动控制的发展概况传统控制是经典控制和现代控制理论的统称,它们的主要特征是基于模型的控制。
由于被控对象越来越复杂,其复杂性表现为高度的非线性,高噪声干扰、动态突变性以及分散的传感元件与执行元件,分层和分散的决策机构,多时间尺度,复杂的信息结构等,这些复杂性都难以用精确的数学模型(微分方程或差分方程)来描述。
除了上述复杂性外,往往还存在着某些不确定性,不确定性也难以用精确数学方法加以描述。
然而,对这样复杂系统的控制性能的要求越来越高,这样一来,基于精确模型的传统控制就难以解决上述复杂对象的控制问题。
在这样复杂对象的控制问题面前,把人工智能的方法引入控制系统,将控制理论的分析和理论的洞察力与人工智能的灵活的框架结合起来,才有可能得到新的认识和新的控制上的突破。
经过近20年来的研究和发展,尤其是近10年来的研究成果表明,把人工智能的方法和反馈控制理论相结合,解决复杂系统的控制难题是行之有效的。
从上面论述不难看出,传统控制和智能控制的主要区别就在于它们控制不确定性和复杂性及达到高的控制性能的能力方面,显然传统控制方法在处理复杂性、不确定性方面能力低且有时丧失了这种能力。
相反,智能控制在处理复杂性、不确定性方面能力高。
用拟人化的方式来表达,即智能控制系统具有拟人的智能或仿人的智能,这种智能不是智能控制系统中固有的,而是人工赋予的人工智能,这种智能主要表现在智能决策上。
这就表明,智能控制系统的核心是去控制复杂性和不确定性,而控制的最有效途径就是采用仿人智能控制决策。
基于神经网络的控制称为神经网络控制(NNC),简称神经控制(NC——Neurocontrol)。
这一新词是在国际自控联杂志《自动化》(Automatica)1994年No.11首次使用的,最早源于1992年H.Tolle和E.Ersu的专著《Neurocontrol》。
基于神经网络的智能模拟用于控制,是实现智能控制的一种重要形式,近年来获得了迅速发展。
1.3 加热炉作为研究对象的特点加热炉是冶金行业生产环节中重要的热工设备。
它在轧钢生产中占有十分重要的地位,它的任务是按轧机的轧制节奏将钢材加热到工艺要求的温度水平和加热质量。
并且在优质高产的前提下,尽可能地降低燃料的消耗,减少氧化烧损。
连续加热炉的操作水平直接影响产品的质量、产量和生产消耗指标,所以国内外关于加热炉自动控制的研究一直受到重视,发展地比较快,也取得了较- 1 -哈尔滨理工大学学士学位论文本课题以蓄热式加热炉作为研究的具体对象,加热炉是高速线材热轧生产过程的重要热工设备,其主要作用是提高方坯的塑性,降低变形抗力,以满足轧制工艺的要求。
它的性能直接影响到加热炉的能耗和最终钢材产品质量、钢坯成材率、轧机设备寿命以及整个主轧线的有效作业率。