基于ARM920T嵌入式通信:控制系统设备驱动开发研究
ARM920T
1特性•融合了ARM920T ™ ARM ® Thumb ®处理器–工作于180 MHz 时性能高达200 MIPS ,存储器管理单元–16-K 字节的数据缓存,16-K 字节的指令缓存,写缓冲器–含有调试信道的内部仿真器–中等规模的嵌入式宏单元结构(仅针对256 BGA 封装)•低功耗:VDDCORE 电流为30.4 mA 待机模式电流为3.1 mA •附加的嵌入式存储器–SRAM 为16K ;ROM 为128K •外部总线接口(EBI)–支持SDRAM ,静态存储器, Burst Flash ,无缝连接的CompactFlash ®,SmartMedia ™及NAND Flash •提高性能而使用的系统外设:–增强的时钟发生器与电源管理控制器–两个有双PLL 的片上振荡器–低速的时钟操作模式与软件功耗优化能力–四个可编程的外部时钟信号–包括周期性中断、看门狗及第二计数器的系统定时器–有报警中断的实时时钟–调试单元、两线UART 并支持调试信道–有8个优先级的高级中断控制器,独立的可屏蔽中断源,伪中断保护–7个外部中断源及1个快速中断源–有122个可编程I/O 口线的四个32位PIO 控制器,各线均有输入变化中断及开漏能力–20通道的外设数据控制器(DMA)•10/100 Base-T 型以太网卡接口–独立的媒体接口(MII)或简化的独立媒体接口(RMII)–对于接收与发送有集成的28字节FIFO 及专用的DMA 通道•USB 2.0全速(12 M 比特/秒)主机双端口–双片上收发器(208引脚PQFP 封装中仅为一个)–集成的FIFO 及专用的DMA 通道•USB 2.0全速(12 M 比特/秒)器件端口–片上收发器, 2-K 字节可配置的集成FIFO •多媒体卡接口(MCI)–自动协议控制及快速自动数据传输–与MMC 及SD 存储器卡兼容,支持两个SD 存储器•3个同步串行控制器(SSC)–每个接收器与发送器有独立的时钟及帧同步信号–支持I 2S 模拟接口,时分复用–32比特的高速数据流传输能力•4个通用同步/异步接收/发送器(USART)–支持ISO7816 T0/T1智能卡–硬软件握手–支持RS485及高达115 Kbps 的IrDA 总线–USART1为全调制解调控制线•主机/从机串行外设接口(SPI)–8~16位可编程数据长度,可连接4个外设•两个 3通道16位定时/计数器(TC)–3个外部时钟输入,每条通道有2个多功能I/O 引脚–双PWM 产生器,捕获/波形模式,上加/下减计数能力•两线接口(TWI)–主机模式支持,所有两线Atmel EEPROM 支持•所有数字引脚的IEEE 1149.1 JTAG 边界扫描•电源供应–VDDCORE ,VDDOSC 及VDDPLL 电压为:1.65V ~1.95V–VDDIOP (外设I/O)及VDDIOM (存储器I/O)电压为:1.65V ~3.6V •提供了208引脚PQFP 及256球状BGA 两种封装BDTIC /ATMEL2AT91RM92001768B–ATARM–07-Jun-05说明AT91RM9200是完全围绕ARM920T ARM Thumb 处理器构建的系统。
基于ARM920T的SamsungS3C2440A嵌入式系统实啦时钟的分析与研究

个 焦 点 。 而 相 当数 量 的 嵌 入 式 系统 对 实 时性 要
提 供 技 术 和 1 名 工 程 师 、 美 国 苹 果 电脑 和 VLS 2 I
T c n lg 出资 合 手组 建 的美 英混 血公 司 。是微 处 eh oo y
架 构 下嵌 入 式 系统 的 核 心 部 件 ,被 广 泛 的 应 用 到
工 业控 制 、 无 线 通 讯 、消 费 类 电子 产 品等 很 多领
域 。AR ( v n e S c ie ) ,既 可 以 M Ad a c dRIC Ma hn s
收 稿 日 期 :2 1-1-2 01 0 4 基金项目:校级教改基金项 目 ( 0 1 J B 2 1XJGY XM0 ) 7
时性。
关键词 :嵌 入式系统 ;AR M微处理器 ;实 时时钟 中 图分 类号 :T 3 P 1 6 文献标识码 :A 文章编 号 :1 0 —0 3 ( 0 2 0 ( 一 0 9 3 9 1 4 2 1 ) 3 上) 0 9 —0 0
Do: .9 9 Jis .0 9 1 4 2 1 .( ) 3 i 1 3 6 / . n 1 0-0 .0 3 上 .1 0 s 3 2
随 着 更 多 应 用 在 嵌 入 式 系统 系统
嵌 入 式 系统 依 托 微 电 子 技 术 、操 作 系统 等 相 关 技 术 的快 速 发 展 , 目前 已经 渗 透 到 E常 生 活 、 t 工 业 生 产 、 通 信 和 交 通 运 输 工 具 等 众 多领 域 ,极 大 地 推 动 了 信 息 社 会 的 构 建 和 发 展 。嵌 入 式 系统 技 术 涵盖 了 计 算 机 、 电 子 与 通 信 、 自动 控 制 等众 多领 域 , 已 经 成 为 相 关 领 域 研 究 、应 用 和 开 发 专 业技 术人 员必须 掌握 的 重要 技 术之一 。
嵌入式系统习题集

一、填空1. 嵌入式系统在硬件设计、操作系统的选择、以及软件的设计上都要遵循―面向应用、量体裁衣、够用为度‖的原则。
2. 嵌入式处理器是嵌入式系统的核心部件,是控制、辅助系统运行的硬件单元。
3. 试列举三种以上主流的通用处理器:ARM/StrongARM、MIPS、PowerPC、X86、68K/Coldfire。
4. ARM处理器共有37个寄存器,其中包括31个通用寄存器和6个状态寄存器。
5. ARM处理器有7种不同的处理器模式,在每一种处理器模式下均有一组相应的寄存器与之对应。
即在任意一种处理器模式下,可访问的寄存器包括15个通用寄存器(R0~R14)、一至二个状态寄存器和程序计数器。
6. 寄存器R13在ARM指令中常用作堆栈指针。
R14也称作子程序连接寄存器或连接寄存器LR,当发生中断或异常时,对应的分组寄存器R14_svc、R14_irq、R14_fiq、R14_abt和R14_und用来保存R15的返回值。
7. ARM微处理器的在较新的体系结构中支持两种指令集:ARM指令集(指令长度为32位)和Thumb指令集(指令长度为16位)。
8. 寄存器R15用作程序计数器(PC)。
该寄存器在ARM状态下,位[1:0]为0,位[31:2]用于保存PC;在Thumb状态下,位[0]为0,位[31:1]用于保存PC。
9. 寄存器R16用作CPSR(当前程序状态寄存器),CPSR可在任何运行模式下被访问。
每一种运行模式下又都有一个专用的物理状态寄存器,称为SPSR (备份的程序状态寄存器)。
10. Thumb状态下的寄存器集是ARM状态下寄存器集的一个子集,程序可以直接访问8个通用寄存器(R7~R0)、程序计数器(PC)、堆栈指针(SP)、连接寄存器(LR)和CPSR。
11. 每一条ARM指令包含的条件码位于指令的最高4([31:28])位,每种条件码可用两个字符表示,可以添加在指令助记符的后面和指令同时使用。
基于ARM920T的两种CAN总线扩展方式及驱动开发
Li e Z u Yu M a Xio h a W i h n ac u n
(n t u eo o si .C ie eAc d myo ce c , e ig 1 0 8 ) I si t f t Ac u t s hn s a e f i e B in 0 0 0 c S n j
随着工业 控 制 系 统逐 步 的 自动 化 , 代 化 , 场 总 线 现 现
控制 系统得 到越来 越多 的重视 和应用 , AN总线是 目前 开 C 发简单 , 能价 格 比高 的一 种 现 场 总线 。 对 其 他 现 场 性 相
总线 而言 。 AN通 信控 制器 的生产 厂家最 多 、 C 品种最全 、 应
Ke wo d : CAN S y rs BU ;ARM ;e s go ;Drv r ie
0 引
言
统, 详细说 明 了其 上扩 展 C N总 线 的两种方 式 , 给 出具 A 并 体的C AN模 块在 实时操 作系统 eo[ 上 驱动程 序开发 的 g s 。
步骤 , 最后 对 2种扩 展进 行 了简要 的 比较 。
eo 上 C Cs AN驱动的开发 , 最后对 2种扩展方式进行了 比较。
关 键 词 :C AN 总 线 ; RM ;e o ; 动 A gs 驱
中 图分 类 号 :TP 6 . 38 1 中 图 分 类 号 :A
T t o st x a d CAN u n h i rv r d v lp n wo meh d o e p n b sa d t erd ie e eo me t
e si po sd go s r p e .Sic h r sn i - o n et eei obul i CAN n efc nmo t f dn itra ei s o ARM 9c is hsp p rp t o wad afedb s hp ,t i a e usfr r il u c n r 1 y tm ( F o to se s CS ) b s d o a e n ARM 9 0 . a d nr d c s wo meh d o e p n 2T n ito u e t to s t x a d CAN b s n ter d ie u a d h i r r v
基于ARM的嵌入式移动机器人控制系统的设计
基于ARM的嵌入式移动机器人控制系统的设计嵌入式移动机器人控制系统是基于ARM架构设计的一种智能机器人控制系统,该系统具有灵活性高、性能稳定、功耗低等优点。
本文将从硬件设计和软件开发两个方面来详细介绍基于ARM的嵌入式移动机器人控制系统的设计。
硬件设计方面,嵌入式移动机器人控制系统的核心是基于ARM技术的处理器,可以选择低功耗、高性能的ARM Cortex-A9或Cortex-A53处理器。
处理器上可以集成多个内核,通过多核处理器的并行计算能力,可以提高机器人的实时性和响应速度。
此外,为了实现机器人的移动功能,还需要配备驱动电机的电机控制器和位置传感器,采用PWM控制技术来控制电机的转速和方向。
在软件开发方面,首先需要开发移动机器人的操作系统。
可以选择基于Linux的嵌入式操作系统,如Ubuntu的ARM版本或自主开发的实时操作系统。
操作系统可以负责机器人的任务管理和资源调度,提供良好的多任务处理能力。
其次,还需要设计适配机器人硬件的驱动程序,包括电机驱动、传感器驱动、通信驱动等。
驱动程序负责与硬件设备进行交互,将控制指令转化为相应的电信号或数据信号,并获取传感器的数据反馈。
最后,还需要进行机器人的应用开发,根据机器人的具体应用场景,开发相关的算法和控制逻辑,实现机器人的自主导航、路径规划、避障等功能。
在嵌入式移动机器人控制系统设计过程中,还需要考虑功耗管理、通信接口和外设模块等因素。
功耗管理是嵌入式系统设计中非常重要的一环,可以使用睡眠模式来降低功耗,还可以采用动态电压和频率调节的技术,根据系统负载的大小动态调整处理器的工作频率和电压。
通信接口方面,可以采用以太网、Wi-Fi、蓝牙等无线通信技术,实现机器人与外部设备的数据交换和控制指令的传输。
外设模块可以包括摄像头、激光雷达、超声波传感器等,通过外设模块可以实现机器人的感知和环境理解能力。
总之,基于ARM的嵌入式移动机器人控制系统的设计需要进行硬件设计和软件开发,并考虑功耗管理、通信接口和外设模块等因素。
基于ARM920T的嵌入式系统eCos移植分析及应用
AR 2 T 处理器 内核 , M9 0 采用 0 1 x 制 造工艺 , . 8/ m 最 高操 作 频率 达 到 2 3MHz的微 处 理 器 。凭 借 低 价 0 格 、 功耗 、 低 高性 能 的 品质 , 国 内外 广 泛应 用 于 各 被 类 开发 板及 手持 便 携 设 备 中 。然 而 在 e o C s的官方
网站及 相关 文献 中并 没 有 公 布 e o C s针 对 ¥ C 4 0 3 2 1
i g wih ma e t m i i u n m m c nfgu a i wa buit O o i r ton s l t
gu d Co .The o ec fg a i nsa a k ge iee s n m r on i ur to nd p c a s w e e a de O t e t r e a d a e la n e S r d d t h a g t bo r s w l s a CO a plc to pr g a W a c m p l d T he r s t p ia in o rm S o ie . e ul s o s t a e s nd t a h w h t Co a is ppl a i n r r m c n i to p og a c a r n r a l h a g tbo r u no m ly on t e t r e a d.
CHENG n Yo g—Ia , ITig—j n. IXi u, I a~q n n o L n u CA n—j L U Hu i
( v lAe o a t a n ie rn n t u e Ya t i 6 0 1, h n ) Na a r n u i lE g n e i g I s i t , n a 4 0 C i a c t 2
嵌入式毕业论文
嵌入式毕业论文目录第一章绪论 (1)1.1 嵌入式系统 (1)1.2 ARM 微处理器简介 (2)第二章系统开发环境 (4)2.1 ADS1.2软件 (4)第三章系统设计选型 (9)3.1 ARM处理器选型 (9)第四章系统硬件电路设计 (12)4.1电源电路设计 (13)4.3字模函数 (14)4.4触摸屏驱动程序 (14)4.5 坐标点校准 (16)4.6画线函数算法 (17)4.7系统软件设计 (18)第五章系统测试结果与分析 (19)5.1系统概述 (19)5.2软件运行截图 (19)第七章设计总结与展望 (21)参考文献 (22)附录二 (2)第一章绪论1.1 嵌入式系统1、什么是嵌入式系统嵌入式系统一般指非 PC 系统,有计算机功能但又不能称之为计算机的设备或器材。
它是以应用为中心,软硬件可裁减的,适应应用系统对功能、可靠性、成本、体积、功耗等综合性严格要求的专用计算机系统。
简单地说,嵌入式系统集系统的应用软件与硬件于一体,类似于 PC 中 BIOS 的工作方式,具有软件代码小、高度自动化、响应速度快等特点,特别适合于要求实时和多任务的体系。
嵌入式系统主要由嵌入式处理器、相关支撑硬件、嵌入式操作系统及应用软件系统等组成,嵌入式系统几乎包括了生活中的所有电器设备,如掌上PDA 、移动计算设备、电视机顶盒、手机上网、数字电视、多媒体、汽车、微波炉、数字相机、家庭自动化系统、电梯、空调、安全系统、自动售货机、蜂窝式电话、消费电子设备、工业自动化仪表与医疗仪器等。
嵌入式系统的硬件部分,包括处理器/微处理器、存储器及外设器件和 I/O端口、图形控制器等。
嵌入式系统有别于一般的计算机处理系统,它不具备像硬盘那样大容量的存储介质,而大多使用EPROM、EEPROM 或闪存(Flash Memory)作为存储介质。
软件部分包括操作系统软件(要求实时和多任务操作)和应用程序编程。
应用程序控制着系统的运作和行为;而操作系统控制着应用程序编程与硬件的交互作用。
2440芯片

2440芯片2440芯片是一款由韩国三星公司开发的基于 ARM920T 核心的嵌入式处理器。
2440芯片主要用于嵌入式系统的设计和开发,包括智能手机、平板电脑、汽车导航、电子书等应用领域。
2440芯片采用了先进的 0.13 微米 CMOS 工艺,整合了 CPU、内存控制器、外设控制器等核心功能模块。
它采用了 16 位宽的内核总线来提供高性能的数据传输能力,可以实现每秒3000 万次的浮点运算。
2440芯片支持多种外设接口,包括 LCD 显示屏接口、触摸屏接口、摄像头接口、以太网接口等。
它还内置了多个串行通信接口,如 UART、SPI、I2C 等,可以方便地与外部设备进行通信,更好地满足不同应用的需求。
2440芯片还具有低功耗和低温升的特点。
它采用了自适应调压(DVFS)技术,可以根据实际负载情况智能调整工作频率和电压,从而降低功耗并延长电池寿命。
此外,2440芯片还采用了三星专利的温度感知功率控制(TPC)技术,可以根据芯片温度自动调整频率和电压,从而保持芯片在安全工作温度范围内。
2440芯片的软件开发支持比较完善。
它支持 Linux、Windows CE、Android 等主流嵌入式操作系统,并提供了丰富的软件开发工具和开发文档,方便开发人员进行应用程序的开发和调试。
此外,2440芯片还提供了一套基于 C 语言的底层驱动库,可以方便地访问芯片的各种功能和外设接口。
总的来说,2440芯片是一款功能强大、性能优越的嵌入式处理器。
它具有高性能、低功耗、低温升等特点,并且支持多种外设接口和主流操作系统,可以广泛应用于各种嵌入式系统的设计和开发。
嵌入式系统原理复习资料

选择题1、在嵌入式系统的存储结构中,存储速度最快的是( B )。
A.Cache B.寄存器组 C.Flash D.内存2、16位的2Mbit×4banks×16的SDRAM容量为( D )。
A.8MB B.32MB C.128MB D.16MB 3、以下说法正确的是( ABD )A.不需将软件引导到RAM中而是让其直接在NorFlash上运行,这种方式启动最快。
B.ARM9对I/O端口进行寻址采用的是存储器映射法。
C.NAND Flash的檫除和写入速度比NOR Flash慢。
D.Nand Flash的存储密度小于Nor Flash。
4、ADD R0,R0,#1 属于( D)。
♦A.基址变址寻址♦B.寄存器寻址♦C.寄存器间接寻址♦D.立即寻址5、()语句将存储器地址为R1的半字数据读入寄存器R0,并将R0的高16位清零。
♦A.LDR R0,[R1]♦B.STRH R0, [R1]♦C.LDRH R0,[R1]♦D.LDRB R0, [R1]6、在下列ARM微处理器的运行模式中,不属于异常模式的是(A )。
A.系统模式B.FIQC.IRQD.数据访问中止模式7、在ARM处理器中,(A )寄存器包括全局的中断禁止位,控制中断禁止位就可以打开或者关闭中断。
A.CPSRB.SPSRC.IPD.PC8、嵌入式系统应用软件一般在宿主机上开发,在目标机上运行,因此需要一个( B)环境。
A.分布式计算 B.交叉编译C.交互平台D.交互操作平台9、通常所说的32位微处理器是指(A )。
♦A.地址总线的宽度为32位♦B.通用寄存器数目为32个♦C.CPU字长为32位♦D.处理的数据长度只能为32位10、在ARM处理器的内部寄存器中,用作子程序连接寄存器的是(C )。
♦A.R12♦B.R13♦C.R14♦D.R15♦S3C2410芯片的I/O端口一共有几个?各端口各有几根I/O引脚?♦每个I/O端口有几个寄存器?有何作用?4、如何告诉汇编编译器下面的指令序列是ARM指令还是Thumb指令?回答:CODE16,CODE325、EQU伪指令相当于C语言的什么语句?回答:#define,用于为一个常量定义字符名称6、如何使用本源文件以外的符号?回答:IMPORT指示符告诉编译器当前的符号不是在本源文件中定义的,而是在其他源文件中定义的,在本源文件中可能引用该符号7、如何将本源文件的符号开放给外部源文件使用?回答:EXPRORT声明一个符号可以被其他文件引用。
s3c2410中文手册

s3c2410中文手册简介S3C2410 是一种嵌入式处理器,由韩国三星电子公司设计和制造。
它是一款高度集成的 ARM 架构芯片,广泛应用于各种移动设备中,如智能手机、平板电脑、PDA 等。
本手册将详细介绍 S3C2410 芯片的特性、功能和使用方法,帮助开发人员更好地理解和应用该芯片。
芯片特性S3C2410 芯片具有以下主要特性:1.ARM920T 内核: S3C2410 芯片采用了 ARM920T 内核,它是一种高性能、低功耗的 32 位 RISC 处理器。
ARM920T 内核支持 ARMv4T 指令集,并具有强大的计算和处理能力。
2.高度集成的外设: S3C2410 芯片内集成了许多常用的外围设备,包括 UART、SPI、I2C、PWM 等。
这些外设可满足各种应用需求,简化了系统设计和连接。
3.多种接口: S3C2410 芯片提供了丰富的接口,如LCD 控制器、触摸屏控制器、SDIO 控制器等。
这些接口允许连接各种外部设备,如显示屏、输入设备、存储卡等,实现更丰富的功能。
4.低功耗设计: S3C2410 芯片采用先进的低功耗设计技术,具有很低的静态功耗和动态功耗。
这使得它非常适合于移动设备,延长了电池寿命。
芯片功能GPIOS3C2410 芯片提供了多个 GPIO 管脚,用来实现输入和输出功能。
GPIO 管脚可以通过软件配置为输入模式或输出模式,并可以设置电平状态。
开发人员可以利用GPIO 实现各种功能,如控制 LED 灯、读取按键状态等。
UARTS3C2410 芯片内集成了多个 UART 模块,用于串口通信。
每个 UART 模块都提供了数据传输和接收的功能,并支持多种通信协议,如 RS232、RS485 等。
开发人员可以使用 UART 实现与外部设备的串口通信。
LCD 控制器S3C2410 芯片具有强大的 LCD 控制器,支持多种显示模式和分辨率。
LCD 控制器可以控制显示屏的像素点,实现图形显示和文字显示功能。
电力自动化系统数据处理安全性

浅谈电力自动化系统的数据处理及安全性【摘要】目前随着经济迅速发展以及社会建设的不断完善,我国不同行业以及各地居民对于电力系统的发展提出了更高的要求。
电力系统的自动化技术,其作用就是可以更好的实现对于运行状态的集中展示及监控,同时能提高电力系统安全运行的性能。
电力自动化系统的数据处理和安全性是电力系统正常运转的保证。
【关键词】电力系统自动化系统数据分析数据处理安全性对于我国的经济发展来说电力系统就是最重要的大动脉之一,目前随着经济迅速发展以及社会建设的不断完善,我国不同行业以及各地居民对于电力系统的发展提出了更高的要求。
电力系统的自动化技术,其作用就是可以更好的实现对于运行状态的集中展示及监控,同时能提高电力系统安全运行的性能。
在电力自动化系统中数据处理部分是其核心,也是信息流的主要表现形式。
一些高新技术,比如计算机或网络通讯技术等在电力自动化技术中的应用,让其数据处理工作也日趋复杂,可以快速以及准确的获取和处理数据是保证电力自动化系统正常运转的保证。
本文主要对此作出简要的分析和探讨。
1 电力自动化系统的数据分析1.1 数据分类一般在电力自动化系统中,可以根据数据来源的不同将其分为原始数据和再生数据。
原始数据指的就是在现场直接采集的数据,再生数据具体是指在原始数据的基础之上进行二次加工得到的数据。
根据电力自动化系统的特点可以将数据进行更为细致的分类:(1)现场实时数据,指的就是在现场实时采集到的数据,其特点就是数据量特别大,因此对于此类数据的存储提出了更高的要求。
(2)基础数据,指的是电力设备设计的数据,属于设备管理的基本范畴,例如线路、发电机等。
(3)日常运行数据,主要有电力自动化系统中记录的数据和各种职能部门在工作中处理的数据。
(4)市场数据,因为电力行业的市场化改革正在逐步进行,所以将市场数据纳入数据分类中也是适应发展趋势的必然要求。
1.2 数据获取获取数据又称为采集数据,是指电力自动化的数据输入,分为数据的采集、处理和转发等三个环节。
嵌入式系统原理与应用习题答案
版权说明本文件中出现的任何文字叙述、文件格式、插图、照片、方法、过程等内容,除另有特别注明,版权均属本人所有。
----WangYiwei由于我正在学习“嵌入式系统原理与应用——基于ARM微处理器和Linux操作系统”这门课程,网络上找不到课后习题答案。
因此本人通过认真地做习题,不懂百度,查阅相关书籍等途径,整理了一份答案,可供各位参考。
注意:答案并不一定完全正确,有异议的答案欢迎提出来大家一起探讨。
1.8 练习题P141.选择题(1)A说明:嵌入式系统的发展趋势表现在以下几方面:1.产品种类不断丰富,应用范围不断普及2.产品性能不断提高3.产品功耗不断降低,体积不断缩小4.网络化、智能化程度不断提高5.软件成为影响价格的主要因素(2)D说明:常见的嵌入式操作系统: VxWorks,Windows CE、uC/OS-II和嵌入式Linux。
(3)A说明:VxWorks是美国WindRiver公司于1983年开发的一种32位嵌入式实时操作系统。
2.填空题(1)嵌入式计算机(2)微处理器外围电路外部设备(3)板级支持包实时操作系统应用编程接口应用程序(4)嵌入式处理器微控制器数字信号处理器3.简答题(1)简述嵌入式系统的定义和特点答:定义:以应用为中心,以计算机技术为基础,软硬件可裁剪,应用系统对功能、可靠性、成本、体积、功耗有严格要求的专用计算机系统。
特点:专用性强、实时性好、可裁剪性好、可靠性高和功耗低等。
(2)简述计算机系统的发展历程第一阶段大致在20世纪70年代前后,可以看成是嵌入式系统的萌芽阶段;第二阶段是以嵌入式微处理器为基础,以简单操作系统为核心的嵌入式系统;第三阶段是以嵌入式操作系统为标志的嵌入式系统,也是嵌入式应用开始普及的阶段;第四阶段是以基于Internet为标志的嵌入式系统,这是一个正在迅速发展的阶段。
(3)简述MCU和DSP的区别MCU是微控制器,DSP是数字信号处理器。
MCU相当于小型的电脑,内部集成的CPU、ROM、RAM、I/O总线,所以集成度高是它的特点。
构建基于ARM920T的嵌入式Linux系统
引言目前,嵌入式操作系统的种类很多,如V xW or ks ,W i ndow s C E 和L i nux 等。
在这些操作系统中,L i nux 是发展最快,应用最广泛的。
由于使用费用、开放源代码程度和使用习惯等各方面因素,L i nux 是得到较多推广的操作系统之一。
由于L i nux 支持从x86到嵌入式处理器的多种处理器,使得L i nux 桌面PC 上开发的很多资源可以轻松的移植到各种嵌入式平台上,这种便利使得在嵌入式系统中使用L i nux 操作系统具有很大吸引力。
开发环境硬件环境本系统中使用目标平台S3C 2410(SA M SU N G 公司使用A RM 920T 处理器内核开发的一款嵌入式处理器)。
ARM 920T 核由A RM 9TD M I ,存储管理单元(M M U )和高速缓存三部分组成。
S3C2410的资源还包括外围存储设备(SD R A M 和N andFl as h),外围显示设备(触摸屏和L C D )与外围接口设备(串口、网口与并口)。
软件平台嵌入式L i nux 系统从软件系统的角度通常可以分为以下4个部分。
引导加载程序。
包括固化在固件中的启动代码(可选)和B oot l oader 。
内核。
特定于嵌入式板子的定制内核以及控制内核引导系统的参数。
文件系统。
包括根文件系统和建立于F l as h 内存设备之上的文件系统。
它是提供管理系统的各种配置文件以及系统执行用户应用程序的良好的运行环境的载体。
用户应用程序。
特定于用户的应用程序。
有时在用户应用程序和内核层之间可能还会有一个嵌入式图形用户界面。
同时装有B oot l oader 、内核启动参数、内核映象和根文件系统。
嵌入式Li nux 系统移植的实现引导加载程序B oot L oader 是在操作系统内核运行之前运行的一段小程序。
大多数B oot L oader 都分为s t age1和s t age2两大部分。
基于ARM920T的织机电控系统CAN总线接口模块设计

rq i m n fh i pe ijt ev gm cie h ad a ltr a a l b i s ge bd e i orcso sc40 eur e t eh hseda - ai ahn .T ehrw r paom w sm iy ul ui m ed dmc poesr 3 24 A e ot g re w n e f n t n r
t e W i d w E o e ai g s se .ic u i g o r e d l ee t n t a i tra e f n t n e l ain,i tru th n l g ec .T e h n o s C p r t y t m n l d n fd i rmo u e s lci ,sr m ne c u c i s r ai t n v o e f o z o n e r p a di t . h n
中 图分 类 号 :H ;P 7 ;H 9 T 6 T 2 3 T 3 文献标志码 : A 文章 编 号 :0 1 4 5 (0 1 0 0 8 10 — 5 1 2 1 )4— 4 6—0 3
De i n o sg f CAN u n e f c o l a e n ARM 9 0 b s i t r a e m du e b s d o 2 T
持 C N V . B技术 规范 而又 不影 响 C N总 线数 据通 A 20 A
0 引 言
目前 ,Байду номын сангаас国外 高档织 机普 遍采 用先 进 的计 算机 技术 、
电子技 术 和 自动 控 制 技 术 对 织 机 进 行 机 电一 体 化 控 制 。如 比利 时 PG N L公 司 的 G MMA 型 和 日本 IA O A X 津 田驹公 司 的 Z X 10机型 。与 国外 先 进水 平 相 比 , A 90
ARM920T处理器

MRC p15,0,Rd,c0,c0,1;opcode2位是1,返回 cache 类型
寄存器1是32位控制寄存器,各位的功能见表10.3。 这里仅说明第0位如果为0则MMU就关闭,否则开启,这 就是MMU是否工作是由CP15决定的原因。其他各位的功能如 表10.3所示。
6. 系统控制协处理器(system control coprocessor)CP15
提供ARM9TDMI寄存器以外的寄存器,用于配置 并控制ARM920T的caches、MMU、时钟类型和大小 端操作等系统操作。从某种意义上说,CP15实际上 就是ARM920T的系统控制器。下面主要是结合CP15 各个寄存器的介绍来说明CP15的工作原理和在 ARM920T中的作用。
表10.1 基于ARM9TDMI处理器核的处理器性能对比
1.1 ARM920T功能模块
ARM920T是在ARM9TDMI的基础上分别增加了 16K的指令和数据cache、数据和指令存储器管理单元 MMU、写缓冲器及协处理器CP15,各单元之间通过 AMBA(advanced microcontroller bus architecture) 总线同总线主控单元相连。其功能模块框图如图10.3 所示。
5. 指令、数据MMU 由于ARM9采用的哈佛结构即数据和指令分开存储,这样相应的cache 和MMU都是由两个分开部分构成。MMU是用来管理虚拟内存系统的硬件。 用于完成将虚拟地址转换成物理地址和控制存储器的存储权限,主要对
ARM9TDMI的指令和数据地址接口提供传输和访问允许检查,提供地址信 号的传输和保护规划。MMU中少量存储空间存放从虚拟地址到物理地址的 匹配表TLB(translation lookaside buffers)。TLB中是虚拟地址及其对应 的物理地址、访问权限、域和映射类型等。当ARM9TDMI对某一虚拟地址 进行访问时,MMU首先查看自己的TLB表,如果没有查到对应的地址信息 则进行转换表漫游操作,并将查到的信息保存在TLB中,而后根据TLB表进 行操作。是否使用MMU的两级虚拟地址管理功能在ARM920T中实际上是由 CP15协处理器决定。如果MMU被关掉,那么如图10.3所示相应的指令和数 据虚拟地址直接由IMVA(instruction modified virtual address)和DMVA (data modified virtual address)输入到IPA(instruction physical address)和DPA(data physical address)中,即由虚拟地址直接变成物 理地址。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
储 在 系 统 内存 中 , 成 C 生 AN 数 据 文 件 , 用 户 通 过 网 络 可 以 供
访 问和修改这些工业 现场数据 。
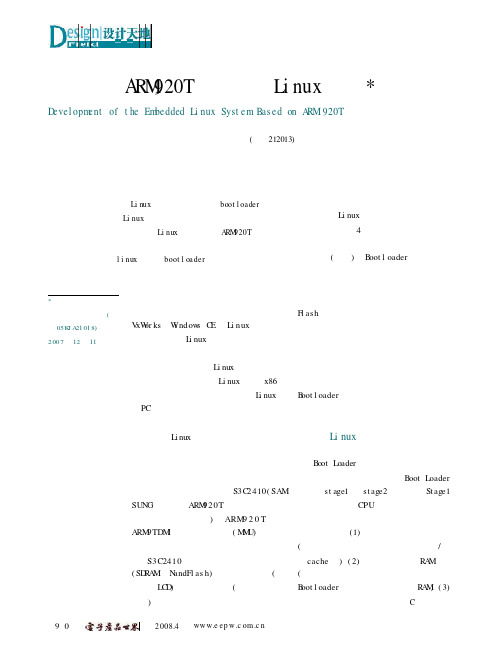
图 1
嵌 入 式 控 制 器 本 身 还 可 以 作 为 工 业 控 制 的一 个 节 点 使 用 , 时 采 集 、 储 、 输 , 过 键 盘 和 L D 进 行 查 询 设 备 状 实 存 传 通 C 态 和 设 置 设 备 参 数 。 嵌 入式 通 信 控 制 系统 将 基 于TC /P 的 该 PI
维普资讯
Mi 0 0 ue p l ain o. 2 N . 0 2 0 c cmp trA pi t s 12 , o 1 ,0 6 r c o V
开发 应 用
微 型电脑应 用
20 0 6年 第 2 卷 第 1 2 0期
文 章编 号 :07 7 7 2 0 )O 0 2 — 0 1 0 — 5X( 0 6 1 一 0 1 4
以 到 WW k g1cr 上 下 载 交 叉 编 译 软 件 包 coso l 2 W. ee.o n r sto一 . 9. .a. z解 压 并 修 改 /t 5 3 trg , ec目录 下 的 poi 脚 本 文 件 , 置 rfe l 设
程 主 机 上 。C AN 节 点 可 以 收 集 工 业 控 制 中 常 见 的 模 拟 量 输 入 、 出和 开 关 量 输 入 、 出等 信 息 。 过 C 输 输 通 AN 总 线 传 送 并 存
以太 网 和 现 场 总 线 技 术 有 效 的 结 合 起 来 , 得 一 台 台 孤 立 的 使
现 场 设 备 作 为 一 个 个 网 络 节 点 有 机 连 接 在 一 起 , 于 进 行 集 易 中化 管 理 和控 制 , 现 了 工业 控 制 领 域 的 网 络 化 和 开 放 性 。 体
2 搭建 系统 软 件开 发环 境
在设 备 驱 动 程 序 的 开 发 过 程 中 , 了提 高 效 率 和 便 于 开 为 发 人 员 的 协作 , 们 调 试 内 核 和 驱 动 程 序 时 候 采 用 下 面 的 F p 我 t
- -
通 过 简单 的现 场 总 线将 其 他 8 1 位 M C 组 成 的嵌 入 式 工 业 /6 U 控 制 设 备 连 接 起 来 , 位 机 的 数 据 和信 息 从 RS 2 / s 8 下 4 2 R 4 5总
1 系统 整体 架构 及工 作原 理
所 设 计 的 嵌 入 式 通 信 控 制 系 统 以 高 性 能 3 微 控 制 器 2位 AR 芯 片 E 9 1 核 心 , 行 嵌 入 式 Ln x操 作 系 统 , 以 M P 3 5为 运 iu 可 实 现 大 量 信 息 采 集 与计 算 、 信 管 理 和 工业 控 制 等 功 能 。 统 通 系 的整 体 架 构 如 图 1 示 : 所 此 嵌 入 式 通 信 控 制 系 统 配 置 了 UA RT、 B . 、 AN2 US 1 1C . O 以 太 网 等 广 泛 流 行 的 工 业 总 线 标 准 接 口 , 以作 为 网 关 , B、 可
基 于 A M9 0 R 2 T嵌 入 式通 信 : 制 系统 设 备 控 驱 动 开 发 研 究
王 松 月 , 杨 福 兴
摘 要 : 网络 化 和 开放 性 是 工 业 控 制 系统 的 发 展 方 向 , 文提 出 了一 种基 于 AR 9 0 和 L n x的 嵌 入 式 通 信 控 制 系统 , 本 M 2T iu 首
线进 入嵌 入 式 控 制 器 , 过 协 议 转 换 后 通 过 Itre 发 送 到 远 经 nent
T le 远 程 开 发 模 式 。如 图 2所示 : en t 首 先 在 L n x服 务 器 上 建 立 交 叉 编 译 环 境 , 叉 编 译 就 iu 交
是 在 一 个 系 统 平 台上 生 成 另 一 系 统 平 台 上 的 可 执 行 代 码 。可
关 键 词 : 入 式 系统 ; 嵌 ARM ; i u ; 动 Lnx 驱
中 图 分 类 号 : P 1 T 36
文献标识码 ; A
引言
传 统 的 8位 / 6 微 控 制 器 由 于 速 度 慢 、 耗 大 且 实 现 1位 功 Itr e 协 议 十分 困 难 , nent 已经 越来 越 不 能 满 足 高 速 发 展 的工 业 系统对大量信息管理的需要 。 随着 AR 工 业 级 芯 片 的 不断 成 M 熟 以 及嵌 入 式 Ln x系 统 的 不 断 完 善 , 发 一 种 基 于 ARM 和 iu 开 L n x的嵌 入 式 系 统 用 于 工 业 系 统 通 信 管 理 很 有 必 要 。而 设 iu 备 驱 动 是 整 个 系 统 的 重 要 组 成 部 分 , 连 接 软 硬 件 平 台 的 桥 是 梁 。有 了 设 备 驱 动 程 序 , 统 才 能 有 效 利 用 相 关 的 硬 件 资 源 。 系 因此 , 统 的效 率 很 大 程 度 上 取 决 于设 备 驱 动程 序 的 效 率 。 系 本 文首先提 出一种 基于 A RM 芯 片 E 9 1 P 35嵌 入 式 通 信 控 制 系 统 , 后 介 绍 了用 动 态 模 块 加 载 法 和 静 态 编 译 进 内 核 法 开 发 然 系统外扩设备 C AN 总 线 和 RS 2 / S 8 线 驱 动 程 序 的 过 4 2 R 4 5总
先介 绍 了 系统 架构 和在 工 业 系统 的应 用 。 然后 分 别 分 析 了用 动 态模 块 加 栽 法 和 静 态编 译 进 内核 法 开 发 系统 外 扩 设 备 C AN 总 线 和 RS 2 / 4 5总 线 驱 动 程 序 的流 程 和 调 试 方 法 。最 后 时 开发 嵌 入 式 系统 驱 动 程 序 的 两种 不 同方 法 做 了 对 比 。 4 2RS 8