CS机器人
CS1.5bot使用方法
POD Bot 支持最新版的CS 1.5,Bot 就是机器人的意思,你自己开一个Lan Game 就可以跟机器人打了,机器人不会骂你,也不会说不玩了,还肉肉的!真是好处多多喔!赶快下载回去练功啰!启动游戏,并建立一个LAN服务器,如果有此地图的路点文件,PODBOT便会自动加入其中。
默认的名字都会有POD的记号。
当然你也可以修改Botnames.txt,这是BOT的名字文件,修改这里你就可以将BOT 的名字修改为你熟悉的朋友,和朋友一起战斗的感觉最好了(当然,你一定要给他英文名字,我有一个好朋友叫做喳喳鸟,我就用zzboard代表他)。
如果没有该地图的路点文件,在屏幕上端就会显示缺少该地图路点文件,无法启动BOT。
游戏中对BOT控制的键是=,按下=以后,屏幕上会出现一个菜单。
1.Quick add bot快速加入BOT,游戏将会随机加入一个BOT,使用的为默认设置。
2.Add specific Bot增加一个定制的BOT,选择此项后,会继续出现一个选择BOT聪明程度的菜单,分别为Stupid(笨蛋级别,智能0~20)、Newbie(菜鸟级别,智能20~40)、Average(平均级别,智能40~60)、Advanced(高级级别,智能60~80)、Professional(专家级别,智能80~90)和Godlike(上帝级别,只能100)几个档次,你可以依照你的水平加入不同级别的BOT。
不过由于人工智能仍然不能和真正的人相比,即使是智能100的BOT和真正的人相比,也只是枪更准一些而已。
3.Kill all bots杀死全部的BOT,如果你已经被BOT打死,而又不耐烦等待BOT之间的战斗的话,可以用这个命令将所有的BOT杀死,重新开始下一回合的战斗。
4.NewroundAll Players)新回合,这个命令和上一个命令的不同之处就在于它将游防锼 械娜硕忌彼溃 阕约海 缓笾匦驴 家桓龌睾险蕉贰?5.Fill the server with Bot游戏里装满BOT,使用这一命令将自动加入BOT,直到游戏满员为止。
csolkz源码

csolkz源码【最新版】目录1.CSol 的概述2.CSol 的源码结构3.CSol 的主要功能4.CSol 的应用案例5.总结正文1.CSol 的概述CSol(Chatbot Solutions)是一款基于 Python 编写的聊天机器人框架。
它提供了简单易用的 API,使得开发者可以轻松地创建、训练和部署聊天机器人。
CSol 具有丰富的功能,支持多种对话管理策略,适用于各种场景,如智能客服、个人助手、语音控制等。
2.CSol 的源码结构CSol 的源码主要分为以下几个部分:- core:核心模块,包含 CSol 的基本功能和 API。
- train:训练模块,提供对话数据处理和训练算法。
- model:模型模块,实现聊天机器人的模型结构和优化。
- strategies:策略模块,支持多种对话管理策略,如基于规则、基于模板、基于强化学习等。
- tools:工具模块,提供用于开发、测试和部署聊天机器人的辅助工具。
3.CSol 的主要功能CSol 具有以下主要功能:- 自然语言理解:支持多种自然语言处理技术,如分词、词性标注、命名实体识别等,以提高对话的准确性。
- 对话管理:支持多种对话管理策略,使得聊天机器人可以灵活地处理各种对话场景。
- 对话生成:利用预训练的模型生成自然流畅的对话回复。
- 语音合成:将文本对话转换为语音输出,提供语音交互功能。
- 知识图谱:支持基于知识图谱的语义理解,使得聊天机器人可以更好地理解用户意图。
4.CSol 的应用案例CSol 已经在多个领域取得了良好的应用效果,如:- 智能客服:通过 CSol 构建的智能客服机器人可以自动响应用户的问题,提高客户满意度。
- 个人助手:利用 CSol 开发的个人助手可以帮助用户进行日程管理、提醒事项等。
- 语音控制:CSol 可以实现语音控制功能,如智能家居控制、语音助手等。
5.总结CSol 是一款功能强大的聊天机器人框架,通过简单易用的 API,开发者可以轻松地创建、训练和部署聊天机器人。
CS1.5 机器人制作方法

4、输入waypoint on;(必须)
5、输入pathwaypoint on;(必须)
6、输入autowaypoint on;(必须)这时在你的背后将有一道道的绿色竖线并有当当当的响声
7、按~键关控制台,从基地朝目的地进发,转遍整个地图
8、再选匪,转遍地图就行
1,千万不能碰到绿色带光环的柱子,碰到后反弹很厉害,基本无法控制…………
2,如果你不是想吃满金币建议尽量不要走跳板。
3,途中有两个跳台,其中第二个是返回入口的,如果不是为了吃满金币建议不要去踩。
4,这里的拐弯还算比较急的,所以转方向时可以把类比杆推到头,在跳过河沟时注意下着地点,由于这里的墙壁碰到没有关系,所以尽量依靠墙壁调整姿势。
1,类比杆且不可推死,轻推即可!!!!!!!
2,这里的会断裂的冰面表面都有细小的裂缝,其实很容易看到的,冰面都是在你到达前断裂的,在断裂后前往别紧张,看清方向,轻推几下类比杆,即可滑过(不要按前,只要改变左右方向即可)
3,带绿色光环的柱子千万千万别撞到,撞到基本必死…………
4,中途有个180度的转弯,不要急,慢慢推几下类比杆即可转过来。
Ice Cave
这一关开始就比较有难度了,首先刚开始的一段坐木桶就很难操作,这里提点建议:
1,变左右方向时不要太用力把类比杆推死,只要轻轻动一点即可,由于惯性,小袋鼠会自动往你操作的方向走的,而且这里更需要注意提前操作,如果等到了要转湾时在变方向肯定是来不及的。
2,在打前方出现的怪物时,不需要瞄准,基本回旋镖放出去就能打到(-_-神枪手??)
Trip to Isiand
本关开始就是骑着个鸟飞,注意鸟可以在空中连续按X保持飞行,但记住只能按5下,另外注意这只笨鸟转向十分别扭,要转一个大弯,所以尽量不要在桥边掉头,以免掉下去。一路向前,顺着路标来到储存点,在第一个跳跃处要站在草包上跳,不然距离太远过不去的。到达储存点后,往小竹房右边走,水里会浮出一座桥,沿着浮桥一路向前,来到悬崖,这里要用栗子?砸气球,之后通过一个升降机进入山洞,在储存点后是乘木桶漂流,期间会有蜘蛛出现,用回旋镖打掉即可,注意木桶不要撞到边上,会费血。。之后又是一段逃亡……
cs1.5机器人路线安装

首先前提是你必须已经安装了机器人补丁;
有些地图像AWP等不带机器人程序,单机无法游戏,想加电脑人,简单得很,注意下面的步骤:
1先在CS快捷方式后输入 -console一定注意在-前有空格的,这样可以使用控制台了 (例如["D:\Program Files\[PC]反恐精英中文站CS1.5中文硬盘版\CS1.5中文硬盘版\cstrike.exe" -console])
2进入CS游戏选警察
3按~键调出控制台,
4输入waypoint on;(必须)
5输入pathwaypoint onnt on;(必须)这时在你的背后将有一道道的绿色竖线并有当当当的响声
7按~键关控制台,从基地朝目的地进发,转遍整个地图
8再选匪,转遍地图就行
9按~键开控制台,输入强行存盘waypoint save nocheck,好了,重新启动CS吧
到此为止你已经在地图中做好机器人程序了,别的没有机器人的地图都可用这方法制作机器人路点
CS机器人补丁说明

Bot单兵作战技能优化完毕后,我们再来优化Bot武器。
用过原版POD、Yapb的朋友一定会发现,Bot总是买一些非主战类用枪,或者是比赛很少用到的枪,Bot再用这些枪的时候,表现出来的‘枪法’也远不如主战用枪(如M4A1、AK47、DesertEagle),那么如何让Bot只买或者捡起这些主战武器,而不去使用Bot自己‘不擅长’的武器呢?
您只需打开位于yapb文件夹内的botweapons.cfg文件,参数辅助说明:1 = 任何队伍都禁止购买
# 0 = 仅允许匪徒购买
# 1 = 仅允许警察购买
# 2 = 双方队伍都可以购买
# CS & DE 类地图(请注意参数的个数)
**********************************************************
《Yapb优化指南》 by [CHM]BoeZombie
经常有人问起,如何优化POD、Yapb机器人,这里我们给大家做一下详细介绍:
在POD、Yapb机器人里,决定机器人技能的文件是botskill.cfg,通过它,我们可以对6组不同级别的机器人分别设定技能特点。
以上就是用来规定在不同类型地图里,Bot做CT或者T时可以/不可以购买武器,这些参数是配合下面的设置的:
代码:#武器编号对应的武器在botweapons.cfg文件里有说明,这里只将BoeZombie设置的给大家:
# 0 - KNIFE
# 3 - DESERT EAGLE
说明:
《反恐精英》Yapb CS1.6机器人中文版补丁
安装:
1. 将解压出来的addons文件夹复制到cstrike目录下
2. 如果是单机使用请修改liblist.gam中的
cs1.6怎么加电脑人?如何加机器人?
原版cs中没有机器人都是玩家角色,需要安装cs1.6机器人补丁才可以增加机器人,但是很多人都不知道cs1.6怎么加电脑人?如何加电脑人?下面来介绍安装机器人补丁和对游戏的设置,按照步骤来做很简单:
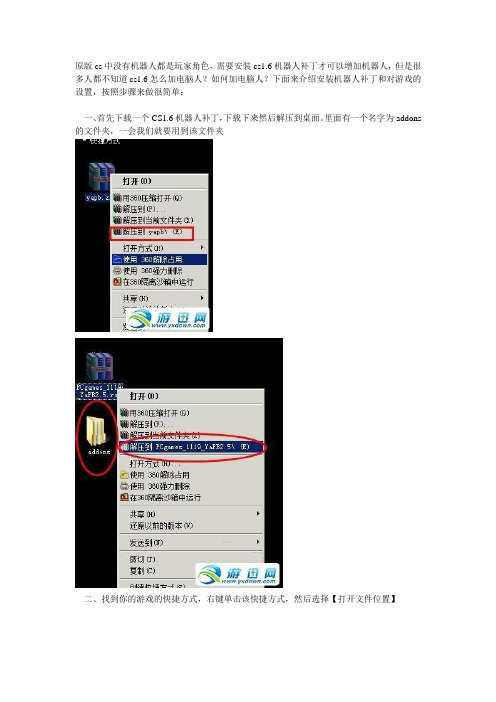
一、首先下载一个 CS1.6机器人补丁,下载下来然后解压到桌面。
里面有一个名字为addons 的文件夹,一会我们就要用到该文件夹
二、找到你的游戏的快捷方式,右键单击该快捷方式,然后选择【打开文件位置】
三、来到游戏的文件夹以后,找到一个名字为cstrike的文件夹,双击打开文件夹
四、将我们解压得到的addons复制到cstrike文件夹下,
五、启动你的游戏,然后点击新建游戏,新建一个服务器
六、你会看到打开一个对话框,选择一个游戏地图,然后点击开始按钮。
七、进入游戏以后,按下数字键选择一个游戏角色,1为恐怖分子,2位反恐精英,5是随机选择
八、你的角色进入游戏以后,按下H键,打开机器人菜单(如果不安装补丁,这个菜单是没有的),进入bot菜单。
九、在次级菜单中选择:增加BOT--然后选择增加的是恐怖分子还是反恐精英,选择一个即可。
你还可以按下快捷键=,来添加机器人。
十、接下来设置机器人的武器,如图所示,选择你想要的设定:仅用匕首、仅用手枪、仅用狙击、所有武器。
十一、最后设定机器人的智商,一般机器人有四个等级:专家、困难、正常、简单。
选择适合你的水平即可。
cs1.5怎么加电脑人

cs1.5怎么加电脑人CS1.5怎么加电脑人CS1.5,也就是Counter-Strike 1.5,是一个非常受欢迎的网络射击游戏。
游戏里有许多不同的角色供玩家选择,其中之一是电脑人,也称为机器人。
电脑人可以在没有其他真实玩家的情况下填补队伍的空缺,让游戏更加有趣和具有挑战性。
下面是关于如何在CS1.5中添加电脑人的详细说明。
1. 启动游戏:首先,确保你已经安装并成功启动了CS1.5游戏。
只有当游戏正常运行时,你才能进行接下来的步骤。
2. 进入游戏设置:在主菜单中,找到并点击“设置”选项。
这将打开游戏的设置界面,其中你可以更改游戏的各种选项。
3. 进入控制台:在游戏设置界面的右下角,你会看到一个按钮标有“控制台”。
点击这个按钮,将打开控制台窗口。
控制台是进入游戏内部设置和命令的地方。
4. 输入命令:在控制台窗口中,你需要输入一些命令来添加电脑人。
首先,你需要输入以下命令:sv_cheats 1。
这个命令将启用游戏的作弊模式,允许你添加电脑人。
5. 添加电脑人:接下来,你需要输入以下命令之一来添加电脑人:- bot_add_ct:这个命令将添加一个反恐精英(CT)队伍的电脑人。
- bot_add_t:这个命令将添加一个恐怖分子(T)队伍的电脑人。
你可以根据需要添加任意数量的电脑人。
例如,如果你想添加两个CT队伍的电脑人,你可以输入命令“bot_add_ct; bot_add_ct”。
6. 调整电脑人的难度:默认情况下,添加的电脑人将是中等难度。
如果你想调整他们的难度级别,你可以使用以下命令之一:- bot_difficulty 0:这个命令将将电脑人设置为简单模式。
- bot_difficulty 1:这个命令将将电脑人设置为普通模式。
- bot_difficulty 2:这个命令将将电脑人设置为困难模式。
你可以根据你的喜好选择合适的难度级别。
7. 保存设置:在输入完所有命令之后,你需要使用“exit”命令或点击右上角的关闭按钮来关闭控制台窗口并保存设置。
CS机器人路点制作

自己制作方法:
cs1.5的路点制作方法:
首先你要安装好机器人程序(以POD2.5为例)。然后找个没有路点的地图建立游戏。进入后调出控制台,输入以下3个命令:
1、waypoint on
2、pathwaypoint on
3、autowaypoint on
输入这3个命令后,你会看到在你走过的路上会出现一个个的彩色棒棒,并且棒棒之间有条线相连,这表示你走到哪里,程序就会记录下来,并作为机器人也要自动走过的路点保存下来。
然后你就沿着地图的路走,尽量把地图的每一寸地都走遍(房顶、水里、梯子等),这就是以后你的机器人要走的路。
走完以后,输入命令:save waypoint nocheck
然后退出游戏,再用这个地图建立游戏,你就会ห้องสมุดไป่ตู้现机器人出现在游戏里了。
我所说的这个方法适合比较简单的地图比如blood什么的,比较复杂的地图由于路径比较大而且复杂,可能有的点相互连接不起来,就可能会出现保存路点以后,机器人卡在一起走不动路,或者站着不动等情况。那样就只有下载制作得比较专业的路点了。
cs机器人指令

bot_knifes_only只允许BOT使用刀
其他命令
bot_add_t在T方增加BOT
bot_add_ct在CT方增加BOT
bot_difficulty[0-3]BOT的聪明程度调节
bot_join_after_player[0/1]在现实玩家之后\之前加入BOT
bot_join_team[t/ct/any]为何方增加BOT
bot_prefix[***]BOT名字的前缀,[***]中的***为可修改部分
bot_quicksave[0/1]保存状态
bot_quota[0/1]分配比率
bot_walk[0/1]全部BOT走路姿态
bot_nav_save保存现有导航线
bot_nav_jump设置“跳”的导航线
bot_nav_crouch设置“蹲”的导航线
bot_traceview[0/1]跟踪视角开关
bot_stop[0/1]全部BOT停止活动
bot_about显示BOT的相关信息(制造者和版本等)
导航菜单
(注意使用,这些命令关系BOT的生命线,在没有完全弄清其含义前请勿随意修改)
bot_show_nav显示导航区域
bot_nav_merge导航区域合并
bot_nav_split导航区域分开
bot_nav_delete导航线删除
bot_nav_edit[0/1]导航线编辑状态开闭
bot_nav_zdraw[0-4]标出导航线
bot_nav_load调出预制导航线
bot_allow_shotguns允许BOT使用SHOTGUN-2系列枪械
bot_allow_sub_machine_guns允许BOT使用sub_machine_gun-3系列枪械
CS类6自由度机械臂的建模与仿真
毕业设计说明书CS 类6自由度机械臂的建模与仿真学系 专2015 年 6 月摘要:机械臂作为机器人最主要的执行机构,对于它的研究有着重要的意义。
机械臂系统包括机械、硬件、软件、算法这四个部分。
各个部分都是紧密相联,需要互相协调来设计的。
采用标准的D.H建模方法,建立了机械臂的数学模型。
对机械臂的正运动学进行了分析,采用解析法对关节角进行解耦运算,推导出了逆运动学的封闭解析解,并采用功率最省做为性能指标,确定了唯一解。
使用基于Matlab平台下的Robotics Toolbox机器人工具箱对推导过程的正确性进行了验证与仿真。
关键字:机械臂运动学模型仿真Abstract:As the most important robot manipulator, robot arm has important significance for its research.. The mechanical arm system includes four parts: machinery, hardware, software and arithmetic.. Each part is closely related, need to coordinate to design.The mathematical model of the manipulator is established by using the standard D.H method.. The manipulator kinematics were analyzed on joint angle decoupling operation by using analytical method derived closed analytical solution of the inverse kinematics, and the power of the province to do as the performance index to determine the uniqueness of the solution. The correctness of the process is verified by using the Toolbox Robotics robot toolbox based on the Matlab platform.目录摘要: (1)1 绪论 (1)1.1研究的背景和意义 (1)1.2国内外机械臂研究现状 (2)1.2.1国外机械臂研究现状 (3)1.2.2 国内机械臂研究现状 (12)1.3 仿真技术研究现状 (14)2 六自由度机械臂建模 (16)2.1概述 (16)2.2机械臂位姿描述 (16)2.2.1 位置描述 (16)2.2.2方位描述 (16)2.2.3位姿描述 (17)2.2.4 平移坐标变换 (17)2.2.5 旋转坐标变换 (17)2.2.6复合变换 (17)2.2.7齐次坐标变换 (17)2.3 六自由度机械臂建模及正运动学分析 (19)2.3.1建立数学模型 (19)2.3.2正运动学分析 (20)2.3.3正运动学仿真 (23)2.4六自由度机械臂逆运动学分析 (25)2.4.2 逆运动学分析 (25)2.4.2 逆运动学仿真 (29)2.5 本章小结 (31)参考文献 (32)致谢 (33)1 绪论1.1研究的背景和意义机器人是一种能够进行编程并在自动控制下执行某些操作和移动作业任务的机械装置⋯。
如何使用CS1.5机器人
首先安装要正确:对于新手来说我还是说清楚一点.1:在桌面或硬盘里面新建一个文件夹.2:把机器人程序剪切到新建文件夹里面.3:点击机器人程序安装.4:安装路经还是新建文件夹.5:进入安装出来的cstrike文件夹里.6:把里面的三个文件剪切到cs中文硬盘版/cstrike里面.这样就有机器人了.如果想要知道那些地图有机器人的话可以打开cs中文硬盘版/cstrike/podbot/WPTDefault 的这个文件,这里面都是地图名.有地图名的就代表有机器人.有的地图没有机器人,这让很多玩家头痛。
而且又下载不到!比如专门练AWP的地图就是没有机器人,怎么办呢很简单!只打五个英文命令就OK了????常常download下来的地图没有路点文件,在家没法和bot们练CS,于是想到了DIY路点文件。
CS机器人程序的waypoint(路点)就是告诉机器人该怎么走,哪里是任务目的地(如是救人质,就是人质房,在哪里防守,在哪里集结。
CS PODBOT 2.5内建了编辑路点文件的功能。
下面我们就来看看具体方法:1、首先装入机器人程序2、然后在CS快捷方式后输入 -console一定注意在-前有空格的3、进入CS游戏选警察5、按~键调出控制台,6、输入waypoint on;(必须)7、输入pathwaypoint on;(必须)8、输入autowaypoint on;(必须)9、再按~键,从基地朝目的地进发,在你的背后将有一道道的绿色竖线并有当当当的响声,你逛遍地图每一个角落再按M键选匪同样逛地图(注意不要跳跃和直上直下的响的梯子楼梯没事)10、再按~键输入强行存盘waypoint save nocheck;(就可运行地图看一下了自己制作的机器人路点了)注意完全退出CS后再进去????哈哈路点制作就这么简单,,,99%看了会成功的,回头再学难的吧一:游戏中PODBot的使用在游戏中,如果你是服务器,就可以对PODBot进行设置,通常设置热键为按了“=”之后,就会出现:1.Quick add Bot2.Add specific Bot3.Kill all Bots4.Newround(All Players)5.Fill Server with Bots6.Kick Random Bot7.Remove all Bots8.Select Weapon Mode参数说明:随机加入一个Bot,默认技能值在60~1002.Add specific Bot加入一个特定的Bot,也就是设置加入的该Bot的技能值选择后会出现:1.Stupid(0-20)白痴级2.Newbie(20-40)新手级3.Average(40-60)普通级4.Advanced(60-80)高手级5.Professional(80-99)专业级6.Godlike(100)无敌选择后会出现:1.Terrorist2.Counter-Terrorist5.Auto-Assign (随机队伍)(选择该Bot的队伍)选择1后会出现1.Phoenix Connexion2.L337 Krew3.Arctic Avengers4.Guerilla Warfare(选择该Bot的人物皮肤)选择2后会出现1.Seal Team 62.GSG-93.SAS4.GiGN(选择该Bot的人物皮肤)3.Kill all Bots杀光所有Bot4.Newround(All Players)新的回合(杀光所有Bot和人类玩家)5.Fill server with Bots用Bot塞满服务器选择后会出现:1.Terrorist2.Counter-Terrorist5.Auto-Assign (随机队伍)(选择队伍)随机kick出一个Bot7.Remove all Botskick出所有Bot8.Select Weapon Mode设置Bot使用的枪械选择后会出现:1.Knives only(JasonModel) 刀(肉搏模式)2.Pistols only 手枪3.Shotguns only 霰弹枪4.Machine Guns only 冲锋枪5.Rifles only 狙击步枪6.Smiper Weapons only 重机枪7.All Weapons(Standard) 恢复所有枪械(标准模式)二:PODBot的路点路点设置是在游戏中的控制台进行设置的,命令如下:waypoint on显示路点并打开编辑开关,要编辑路点必须先输入这个命令waypoint on noclip显示路点并打开编辑开关,与上一个命令不同的是这个命令同时打开了“穿墙”模式,你可以在空中和水下自由移动而不受重力的影响,这个开关主要用来在编辑水下的路点时使用。
CS龙珠(机器人)操作菜单

CS龙珠(机器人)操作菜单按"+"唤出菜单 0~9是选项1: Add Random Bot 随机增加人造人2: Add Custom Bot 增加人造人1: Team Good Good队1: Buu 布欧2: Goku 孙悟空3: Gohan 孙悟饭4: Krillin 小林5: Frieza 佛利萨6: Piccolo 短笛7: Trunks 特兰克斯8: V egeta 贝吉塔9: Cell 沙鲁0: Exit 退出2: Team Evil Evil队同上3: Random Team 随机队伍同上0: Exit 退出3: Add Super Bot 增加超级人造人1: Super Bot 超级人造人2: Mega Bot 无敌人造人3: Ultimate Bot 终极人造人4: Random 随机0: Exit 退出4: Fill Server 批量增加人造人1: Fill Server 服务器满员2: Fill Half Team Good Good队半满员3: Fill Half Team Evil Evil队半满员4: Fill Team Good Good队满员5: Fill Team Evil Evil队满员0. exit 退出5: Advanced Options 高级选项1: Set Bot Skill 人造人战斗水平1: Best 超强2: Good 强3: Medium 一般4: Weak 烂5: Bad 超烂6: Default 默认水平0: Exit 退出2: Set Melee Percent 选择人造人的肉搏技巧1: 100%2: 80% - 99%3: 60%-80%4: 40%-60%5: 20%-40%6: 1%-20%7: 0%8: Random 随机9: Default 默认0. exit 退出3: Set Teleport Percent 选择人造人的瞬移技巧同上4: Follow Mode 跟随模式5: Combo''s on/off 连击开/关6: Auto Pilot 自动飞行(自动演示)1: Enable 允许2: Disable 禁止3: Lock Camara 锁定视角0: Exit7: Bots use destructo discs 人造人使用元气斩0: Exit 退出6: Chat Settings 聊天设定1: Chat On/Off 聊天开/关2: Set Chat Percent 设定闲谈百分比3: Set Whine Percent 设定抱怨百分比4: Set Taunt Percent 设定辱骂百分比5: Set Swap Percent 设定交换百分比6: Set Lower Percent 设定低落百分比7: Set Drop Percent 设定下降百分比8: Set Tag Percent 设定标签百分比0: Exit 退出7: Kick Last Bot 消灭最后出现的人造人8: Kick Bots 消灭人造人1: Kick All Bots 消灭所有的人造人2: Kick Good Team Bots 消灭Good队人造人3: Kick Evil Team Bots 消灭Evil队人造人0: Exit 退出9: Debug Options 设定修正1: Bots Don''t Shoot 人造人不攻击1: Enable 允许2: Disable 禁止0: Exit 退出2: Bots Don''t Search enemy''s人造人不搜索敌人同上3: Bots Ignore Human Players人造人不理睬玩家同上4: Bots Move 人造人移动同上5: Draw Trace Lines 显示机器人正在面对的方向同上0: Exit 退出0: Exit 退出。
萤石 智能服务机器人 儿童陪护机器人 CS-RK2-3E2WFBSRN2 使用说明书
本产品为电子产品,请勿涉水,请远离火源。
. 本产品采用锂离子聚合物电池,充电时推荐使用标配的电源适配器(12V 1A)。
充电时,请勿让儿童使用。
电池安装在产品内部,请勿拆卸本机,如需维修请联系厂家。
. 维护保养方法:断开电源并关机,用纸巾或布擦拭,不得水洗。
. 如果外观有破损,请立即送修,禁止继续给儿童使用,以免儿童受伤。
. 禁止儿童自行充电,以免发生触电危险。
. 请家长定期检查充电器的插头、外壳及其他部件是否完好,如果发现损坏请立即停止使用直至修复完好,以免造成伤害。
. 请及时丢弃包装内塑料袋、捆扎绳等物品,以免造成伤害。
. 警告本产品不适合3岁以下儿童使用。
.外观介绍正面头部触摸区镜头胸前触摸区屏幕充电指示灯麦克风温湿度传感器背面开关机键Micro SD卡槽用螺丝刀打开卡盖后可看见RESET键扬声器回充传感器底部防跌传感器充电簧片按键说明正常状态下:轻触唤醒机器人;长按1秒以上启动微聊功能;长按开关机键和胸前触摸区4秒,机器人进入配网模式音乐播放状态下,轻触停止播放视频通话状态下,轻触挂断通话闹钟提醒状态下,轻触关闭闹钟提醒胸前触摸区开关机键RESET键头部触摸区关机状态下,按住1秒及以上直到屏幕亮起开机开机状态下,连续按两下开启/关闭智能看家模式开机状态下,长按4秒关机开机状态下,同时按住开关机键和胸前触摸区4秒,机器人进入配网模式长按4秒,恢复出厂设置正常状态下:轻触表现出被抚摸的情绪音乐播放状态下,轻触下一首播放视频通话状态下,轻触接听通话闹钟提醒状态下,轻触关闭闹钟提醒使用注意事项·遥控时注意机器人所处环境和遥控速度,防止速度过快造成的跌落。
建议在平整地面上运行。
·自动回充前请先将机器人遥控至充电桩附近且视野清晰。
·机器人内含精密电子仪器,儿童在使用时请勿摔打。
·机器人头顶有麦克风,请勿覆盖。
·使用时机器人头部温度高于环境温度属正常现象,请放心使用。
CS1.5机器人制作方法

fy_ice world.bsp(雪地)这地图cs本身没有机器人路点文件,所以装了机器人进地图还是加不了电脑,不过像这种小地图可以自己做个路点文件:注意下面的步骤:1、先在CS快捷方式后输入 -co nsole一定注意在-前有空格的,这样可以使用控制台了2、进入CS用你需要的地图创建游戏,选警察3、按~键调出控制台,4、输入w aypoi nt on;(必须)5、输入path waypo int o n;(必须)6、输入aut owayp ointon;(必须)这时在你的背后将有一道道的绿色竖线并有当当当的响声7、按~键关控制台,从基地朝目的地进发,转遍整个地图8、再选匪,转遍地图就行9、按~键开控制台,输入强行存盘way point save noch eck,好了,重新启动CS吧到此为止你已经在A WP地图中做好机器人程序了,别的没有机器人的地图都可用这方法制作机器人路点L glooVilla ge开始后沿路往前走,前方会有洞口有雪球滚出,注意躲避轻松通过^_^往前走,来到冰面,这里要特别注意~在冰面上只控制袋鼠的移动方向和跳跃,无法停止,不能2段跳,而且在跳跃后落地时会变成坐在地面上的状态,这时是不能再次跳跃的,要特别注意,切记不可随便乱跳!!!!!离开冰面后,解决掉前面的3个小怪,就来到一个炮台前,按X坐上炮台,按○发射炮弹,打掉上方的2个热气球炮台,在砸掉前方堵住洞口的冰块就可以继续前进了。
跳过冰块,注意在跳最后一个冰块时要注意对岸上的一个拿枪的怪物,小心不要在跳到一半时被其打下。
吃到回旋镖后,按住R2键,按△投掷回旋镖打死拿枪的怪舞,这里可以按住R在左右移动即可躲开它的攻击。
cs 机器人原理

cs 机器人原理
CS机器人是一种基于计算机科学和机器人技术的智能机器人,它能够模拟人类的思维和行为,实现自主决策和执行任务。
CS机器人的原理主要包括感知、决策和执行三个方面。
感知是CS机器人的基础,它通过传感器获取环境信息,包括声音、图像、温度、湿度等多种信号。
这些信号经过处理后,可以让机器人了
解周围环境的状态和变化,从而做出相应的反应。
例如,当机器人感
知到有障碍物时,它会自动避开或绕过障碍物,以保证自身安全。
决策是CS机器人的核心,它通过算法和模型分析感知到的信息,进行推理和判断,从而做出最优的决策。
这些决策可以是基于预设的规则
和策略,也可以是基于机器学习和深度学习的自主学习和优化。
例如,当机器人需要执行任务时,它会根据任务的要求和环境的变化,选择
最优的路径和方法,以完成任务。
执行是CS机器人的实现,它通过执行器和执行控制器实现机器人的动作和运动。
执行器包括电机、液压、气动等多种形式,可以实现机器
人的移动、抓取、搬运等多种动作。
执行控制器则负责控制执行器的
运动和力度,以实现机器人的精准控制和操作。
例如,当机器人需要
抓取物品时,它会通过执行器和执行控制器实现精准的抓取和搬运。
总的来说,CS机器人的原理是基于感知、决策和执行三个方面的技术实现,它可以模拟人类的思维和行为,实现自主决策和执行任务。
未来,CS机器人将在工业、服务、医疗等多个领域发挥重要作用,为人类创造更多的价值和便利。
cs 增加机器人指令的方法
cs 增加机器人指令的方法
CS 增加机器人指令的方法。
在现代科技的发展中,机器人已经成为了人们生活中不可或缺的一部分。
无论是在工业生产中还是在日常生活中,机器人都扮演着重要的角色。
而要使机器人更加智能和灵活,就需要不断地增加机器人指令,以满足不断变化的需求。
下面将介绍一些增加机器人指令的方法。
首先,可以通过编程语言来增加机器人指令。
通过编写代码,可以为机器人添加新的功能和指令,使其具有更多的操作能力。
例如,可以使用C++、Python等编程语言来为机器人编写新的指令,实现更加复杂的操作。
其次,可以利用人工智能技术来增加机器人指令。
通过机器学习和深度学习等技术,可以让机器人具有自主学习和适应能力,从而能够根据环境和任务的变化来自动调整指令和行为。
此外,还可以通过传感器技术来增加机器人指令。
通过安装各种传感器,如视觉传感器、声音传感器、触摸传感器等,可以让机
器人获取更多的信息,从而能够更加准确地执行指令。
最后,可以通过云端技术来增加机器人指令。
将机器人连接到云端,可以通过远程控制和更新来为机器人增加新的指令,实现实时的功能升级和扩展。
总之,通过以上方法可以为机器人增加新的指令,使其具有更加丰富和灵活的操作能力,从而更好地满足人们的需求。
随着科技的不断发展,相信机器人将会变得越来越智能和灵活,为人类的生活带来更多的便利和惊喜。
cs 机器人原理

cs 机器人原理CS机器人原理近年来,随着人工智能技术的快速发展,CS机器人(Computer Science Robot)作为一种新型的智能机器人逐渐走入人们的视野。
CS机器人是基于计算机科学原理和技术构建的机器人,它能够模拟人类的思维和行为,执行各种任务和工作。
本文将从CS机器人的原理入手,介绍其工作原理和相关技术。
CS机器人的核心原理是人工智能。
人工智能是一门研究如何使计算机能够像人类一样思考和行动的学科。
通过模拟人类的大脑神经网络,CS机器人能够学习和处理复杂的信息,做出智能决策。
人工智能技术包括机器学习、深度学习、自然语言处理等,这些技术使CS 机器人能够理解人类的语言和意图,并做出相应的回应。
CS机器人还依赖于计算机视觉技术。
计算机视觉是指让计算机能够理解和处理图像和视频的能力。
CS机器人通过摄像头等传感器获取环境中的图像信息,并通过图像处理算法识别出物体、人脸等。
这使得CS机器人能够与人类进行交互,如人脸识别、手势识别等。
CS机器人还需要运用自动控制技术。
自动控制是指通过设定的控制策略,使机器人能够自主地完成任务。
CS机器人通过传感器获取环境信息,通过控制算法分析和判断,然后执行相应的动作。
例如,通过编程控制机器人的运动轨迹和动作,使其能够在复杂环境中导航和执行任务。
除了以上核心原理,CS机器人还需要具备一定的感知能力和交互能力。
感知能力是指机器人能够感知周围环境的能力,包括声音、光线、温度等。
交互能力是指机器人能够与人类进行有效的交流和互动。
CS机器人通过语音识别和合成技术,能够理解人类的语言并回应,同时也能通过语音合成将机器人的话语转化为人类能够理解的语言。
CS机器人的原理是多个技术的综合应用,它们相互协作,共同构成了CS机器人的智能系统。
CS机器人通过不断学习和优化,不断提升自己的智能水平和技能,为人类提供更多的服务和帮助。
总结起来,CS机器人的原理是基于人工智能、计算机视觉和自动控制等技术的综合应用。
CS1.5机器人路点设置
CS1.5机器人路点设置假如你想自己制作某个地图的机器人的话,看下面1、首先装入机器人程序2、然后在CS快捷方式后输入 -console一定注意在-前有空格的3、进入CS游戏选警察4、按~键调出控制台5、输入waypoint on6、输入pathwaypoint on7、输入autowaypoint on8、再按~键,从基地朝目的地进发,在你的背后将有一道道的绿色竖线并有当当当的响声,你逛遍地图每一个角落再按M键选匪同样逛地图(注意不要跳跃和直上直下的响的梯子楼梯没事)10、再按~键输入强行存盘waypoint save nocheck;(就可运行地图看一下了自己制作的机器人路点了)注意完全退出CS后再进去路点设置是在游戏中的控制台进行设置的,命令如下:waypoint on显示路点并打开编辑开关,要编辑路点必须先输入这个命令waypoint on noclip显示路点并打开编辑开关,与上一个命令不同的是这个命令同时打开了“穿墙”模式,你可以在空中和水下自由移动而不受重力的影响,这个开关主要用来在编辑水下的路点时使用。
waypoint off 关闭编辑开关(同时关闭“穿墙”模式)waypoint add添加一个路点,这个命令会打开一个菜单,供你选择要添加的路点类型,具体请看下面的“部分命令详细说明”waypoint delete删除与你当前位置最近的路点waypoint find x用一条线显示路点名称为X的路点在你的哪个方向waypoint showflags显示路点的特殊标记waypoint addflag给当前路点加上特殊标记waypoint delflag删除当前路点的特殊标记waypoint setradius x把当前路点的作用范围设置为数值Xwaypoint stats显示当前地图一共设置了多少个路点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Bot分为6组不同级别,你可以分别对他们设置,在变态版中之所以变态,就是因为BoeZombie将6组不同级别的Bot的技能都作了相同的最优设置,参数实例:
代码:MIN_DELAY 0.0
MAX_DELAY 0.0
AIM_OFFS_X 0.0
AIM_OFFS_Y 0.0
现在你可以优化出属于你自己的Bot了!
**********************************************************
《Yapb优化指南》 by [CHM]BoeZombie
经常有人问起,如何优化POD、Yapb机器人,这里我们给大家做一下详细介绍:
在POD、Yapb机器人里,决定机器人技能的文件是botskill.cfg,通过它,我们可以对6组不同级别的机器人分别设定技能特点。
YaPB v2.5 简体中文版CS1.5/CS1.6 BOT机器人补丁简介 说明:
《反恐精英》Yapb CS1.6机器人中文版补丁
安装:
1. 将解压出来的addons文件夹复制到cstrike目录下
2. 如果是单机使用请修改liblist.gam中的
gamedll "dlls\mp.dll" 为 gamedll "addons\yapb\dlls\podbot.dll"
# 进攻类型的机器人可用的武器编号(请注意参数的个数,要与上表中的对应)
[AGRESSIVE]
0,3,3,3,3,3,3,3,3,3,3,3,3,3,14,14,16,14,16,16,16,14,14,14,16,16
# 防守类型的机器人可用的武器编号(请注意参数的个数,要与上表中的对应)
您只需打开位于yapb文件夹内的botweapons.cfg文件,参数辅助说明:
代码:# 键值解释:
# -1 = 任何队伍都禁止购买
# 0 = 仅允许匪徒购买
# 1 = 仅允许警察购买
# 2 = 双方队伍都可以购买
# CS & DE 类地图(请注意参数的个数)
以上就是用来规定在不同类型地图里,Bot做CT或者T时可以/不可以购买武器,这些参数是配合下面的设置的:
代码:#武器编号对应的武器在botweapons.cfg文件里有说明,这里只将BoeZombie设置的给大家:
# 0 - KNIFE
# 3 - DESERT EAGLE
AIM_OFFS_Z 0.0
HEADSHOT_ALLOW 100
HEAR_SHOOTTHRU_PROB 100
SEEN_SHOOTTHRU_PROB 100
//*注:请大家放心,即使最优化,那机器人也不会说做到完全无敌,不用担心打不过它.
看过以上辅助说明,您现在就能很清楚该如何设置参数以优化出自己想要的Bot的技能了。
[STANDARD]
-1,-1,-1,2,2,0,1,2,2,2,1,2,0,2,0,0,1,0,1,1,1,0,0,1,0,1
# AS 类地图(请注意参数的个数)
[AS]
-1,-1,-1,2,2,0,1,1,1,1,1,1,0,2,0,-1,1,0,1,1,0,0,-1,1,1,1
Bot单兵作战技能优化完毕后,我们再来优化Bot武器。
用过原版POD、Yapb的朋友一定会发现,Bot总是买一些非主战类用枪,或者是比赛很少用到的枪,Bot再用这些枪的时候,表现出来的‘枪法’也远不如主战用枪(如M4A1、AK47、DesertEagle),那么如何让Bot只买或者捡起这些主战武器,而不去使用Bot自己‘不擅长’的武器呢?
# 14 - AK47
# 16 - M4A1
# 正常类型的机器人可用的武器编号(请注意参数的个数,要与上表中的参数个数对应,否则会无法游戏)
[NORMAL]
0,3,3,3,3,3,3,3,3,3,3,3,3,3,14,14,16,14,16,16,16,14,14,16,14,16
如果你希望将此机器人作为metamod的插件,请在metamod的plugins.ini里写入
win32 addons\yapb\dlls\podbot.dll
(修改文件,请单击鼠标右键以记事本方式打开)
注意: 这两种方法请选择其一
3. 安装完毕,进入游戏后按“=”开起机器人菜单,按“-”开启路点菜单
打开位于yapb文件夹内的botskill.cfg文件,参数辅助说明:
代码:# MIN/MAX_DELAቤተ መጻሕፍቲ ባይዱ---机器人的最小/最大反应时间,数值越小,反应越快。最小值=0
# AIM_OFFS_X/Y/Z---机器人瞄准的偏移量(X\Y\Z 坐标轴) ,数值越小,偏移越小,打的越准。 最小值=0
[DEFENSIVE]
0,2,1,3,3,3,3,3,3,3,3,3,3,3,14,14,16,14,16,16,16,14,14,14,16,16
最后的效果就是,Bot平时只买DESERT EAGLE,AK47(作为T时),M4A1(作为CT时),当Bot见到M4A1时,会扔掉手中的AK47,捡起M4A1。
# HEADSHOT_ALLOW---机器人命中敌人头部的几率,数值越大,爆头几率越大。最大值=100
# HEAR_SHOOTHRU_PROB BOT---机器人听到敌人时,射穿障碍物命中敌人的几率,数值越大,几率越大。最大值=100
# SEEN_SHOOTHRU_PROB BOT---机器人看到敌人时,射穿障碍物命中敌人的几率,数值越大,几率越大。最大值=100