排爆机器人操作手册
排爆机器人技术参数
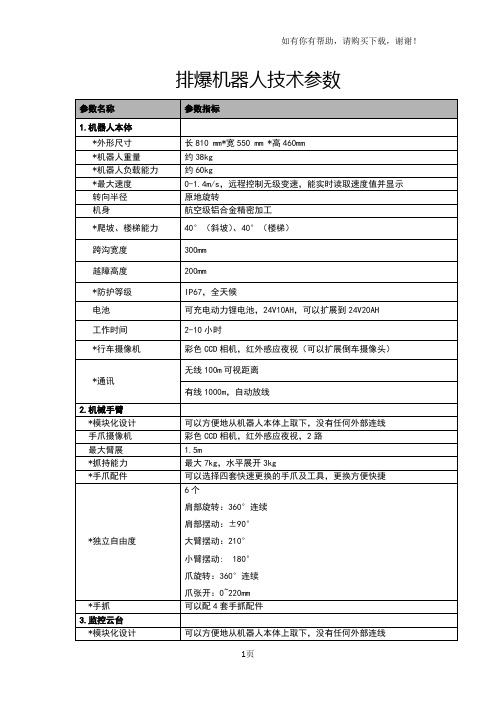
排爆机器人技术参数参数名称参数指标1.机器人本体*外形尺寸长810 mm*宽550 mm *高460mm*机器人重量约38kg*机器人负载能力约60kg*最大速度0-1.4m/s,远程控制无级变速,能实时读取速度值并显示转向半径原地旋转机身航空级铝合金精密加工*爬坡、楼梯能力40°(斜坡)、40°(楼梯)跨沟宽度300mm越障高度200mm*防护等级IP67,全天候电池可充电动力锂电池,24V10AH,可以扩展到24V20AH工作时间2-10小时*行车摄像机彩色CCD相机,红外感应夜视(可以扩展倒车摄像头)*通讯无线100m可视距离有线1000m,自动放线2.机械手臂*模块化设计可以方便地从机器人本体上取下,没有任何外部连线手爪摄像机彩色CCD相机,红外感应夜视,2路最大臂展 1.5m*抓持能力最大7kg,水平展开3kg*手爪配件可以选择四套快速更换的手爪及工具,更换方便快捷*独立自由度6个肩部旋转:360°连续肩部摆动:±90°大臂摆动:210°小臂摆动: 180°爪旋转:360°连续爪张开:0~220mm*手抓可以配4套手抓配件3.监控云台*模块化设计可以方便地从机器人本体上取下,没有任何外部连线*监控摄像机1/4" Sony CCD ,520TVL以上 , 低照度:0.02Lux,防爆镜头*云台运动自由度3个独立自由度,旋转速度可调云台升降:30cm云台旋转:360度连续,旋转速度最大120°/秒云台俯仰:-45°~ 190°,旋转速度最大50°/秒4.操控终端控制箱便携式、防水、防尘、高强度控制箱*控制箱尺寸410×300×190mm控制箱重量10kg*显示屏尺寸12英寸高亮度液晶屏,宽视角,户外清晰*快捷键功能多自由度联动一键控制:手臂伸展、手臂抓取、手臂收回功能*操控高质量摇杆手柄,软件界面人性化设计,观察图像和操控方便显示图像同时监控4路视频信号或单独放大其中1路*武器开关带有武器钥匙、保险、开火等开关,方便配备水炮枪等部件*信息显示实时仿真显示机器人的速度、电压、姿态等信息电池可充电24V锂电池,充满电工作时间不小于3-5小时参数名称参数指标1.机器人本体*外形尺寸长810 mm*宽550 mm *高460mm*机器人重量约38kg*机器人负载能力约60kg*最大速度0-1.4m/s,远程控制无级变速,能实时读取速度值并显示转向半径原地旋转机身航空级铝合金精密加工*爬坡、楼梯能力40°(斜坡)、40°(楼梯)跨沟宽度300mm越障高度200mm*防护等级IP67,全天候电池可充电动力锂电池,24V10AH,可以扩展到24V20AH工作时间2-10小时*行车摄像机彩色CCD相机,红外感应夜视(可以扩展倒车摄像头)*通讯无线100m可视距离有线1000m,自动放线2.机械手臂*模块化设计可以方便地从机器人本体上取下,没有任何外部连线手爪摄像机彩色CCD相机,红外感应夜视,2路最大臂展 1.5m*抓持能力最大7kg,水平展开3kg*手爪配件可以选择四套快速更换的手爪及工具,更换方便快捷*独立自由度6个肩部旋转:360°连续肩部摆动:±90°大臂摆动:210°小臂摆动: 180°爪旋转:360°连续爪张开:0~220mm*手抓可以配4套手抓配件3.监控云台*模块化设计可以方便地从机器人本体上取下,没有任何外部连线*监控摄像机1/4" Sony CCD ,520TVL以上 , 低照度:0.02Lux,防爆镜头*云台运动自由度3个独立自由度,旋转速度可调云台升降:30cm云台旋转:360度连续,旋转速度最大120°/秒云台俯仰:-45°~ 190°,旋转速度最大50°/秒4.操控终端控制箱便携式、防水、防尘、高强度控制箱*控制箱尺寸410×300×190mm控制箱重量10kg*显示屏尺寸12英寸高亮度液晶屏,宽视角,户外清晰*快捷键功能多自由度联动一键控制:手臂伸展、手臂抓取、手臂收回功能*操控高质量摇杆手柄,软件界面人性化设计,观察图像和操控方便显示图像同时监控4路视频信号或单独放大其中1路*武器开关带有武器钥匙、保险、开火等开关,方便配备水炮枪等部件*信息显示实时仿真显示机器人的速度、电压、姿态等信息电池可充电24V锂电池,充满电工作时间不小于3-5小时带*项目为参数必须满足项具有:1、水中作业视频2、质检报告3、科技查新报告,查新结果为国际先进4、专利5、原始机器人生产厂家。
排爆筒的使用流程
排爆筒的使用流程概述排爆筒是一种用于处理危险物品的特殊工具,它的使用需要严格遵守一系列流程和操作规范,以保证安全和高效地进行危险品排爆工作。
本文将介绍排爆筒的使用流程,包括准备工作、操作步骤和安全措施。
准备工作1.检查设备:在使用排爆筒之前,要仔细检查设备的完整性和稳定性。
确保排爆筒没有任何损坏或松动的部件。
2.确定作业区域:在进行排爆作业之前,必须对作业区域进行严格的勘察和划定。
确保排爆作业区域内没有其他人员和障碍物,以免发生意外事故。
3.穿戴个人防护装备:在使用排爆筒时,必须穿戴符合标准的个人防护装备。
包括防爆服、防爆靴、防爆手套、防爆面具等。
操作步骤1.设置排爆筒:将排爆筒放置在稳固的平台上,并根据具体情况调整角度和高度。
确保排爆筒能够稳定地对准目标物。
2.连接电源:将排爆筒与电源连接,并确保连接稳固可靠。
排爆筒的电源通常为直流电,需要检查电源电压和频率是否符合要求。
3.启动排爆筒:按照排爆筒的操作手册,按照顺序操作排爆筒的开关、按钮等控制装置,将其启动。
确保排爆筒能够正常工作。
4.对准目标物:使用排爆筒的控制装置,将其对准目标物。
在对准过程中要保持冷静,小心操作,确保排爆筒能够精确地对准目标物。
5.进行排爆工作:按照排爆筒的操作手册,根据实际情况选择合适的排爆方法,并进行作业。
在作业过程中,要密切关注排爆筒的工作状态,并及时调整操作方法和参数。
6.完成排爆作业:在排爆作业完成后,要将排爆筒停止工作,并彻底断开电源。
确保排爆筒处于安全的状态,并进行必要的清洁和维护工作。
安全措施1.严格遵守操作规程:在使用排爆筒时,必须按照操作手册和标准程序进行操作,严禁任意更改操作方法和参数。
2.注意观察和沟通:在排爆作业过程中,要密切观察排爆筒的工作状态,并及时沟通和交流。
发现任何异常情况要及时报告和处理。
3.注意个人安全:在使用排爆筒时,要始终保持警惕和谨慎。
避免接近排爆筒的工作端,防止被排爆物和爆炸物碎片伤害。
防爆机器人安全操作及保养规程
防爆机器人安全操作及保养规程引言防爆机器人是在防爆区域内操作的重要设备。
为了保证设备的安全使用和长期使用,需要制定安全操作规程和保养规程,本文档将介绍防爆机器人的安全操作和保养规程。
安全操作规程1. 了解防爆机器人在操作机器人之前,需要了解机器人的性能和操作规程。
在操作中应按照机器人使用手册上的规定操作,严禁使用未经授权的功能和操作方法。
2. 安全防护措施2.1 穿戴合适的防护装备,包括防爆服、手套、安全帽等。
2.2 确保操作区域内没有易燃、易爆等危险物品。
2.3 禁止将手或其他物体插入机器人内部,以免造成人身伤害或机器故障。
2.4 若机器人停机,则必须立即停止相关操作,确保安全。
3. 操作步骤3.1 在进行任何操作之前,请确保操作者已经接受过培训和考核。
3.2 在机器人运行过程中,不应在机器人周围行走或工作。
3.3 应按照机器人使用手册的规定,操作机器人。
3.4 操作过程中,应随时关注机器人工作状态,一旦发现异常及时停机检查。
4. 废弃物处理任何废弃物都不得扔入机器人内部,必须按照划定的安全区域及时清除废弃物。
保养规程1. 质量检查1.1 定期进行机器人质量检查,确保机器人性能正常。
1.2 要检查和更换机器人的零部件、电缆、传动机构等维护保养件,确保机器人运行的平稳性和稳定性。
1.3 对机器人进行定期的维护,包括紧固螺钉、轴承润滑和电缆连接位置的检查和维护。
2. 清洁维护2.1 确保机器人运行良好之前,将杂物和其他障碍物清理干净。
2.2 及时清除机器人表面的污垢,避免机器人运行出现故障。
2.3 清除机器人细节部分的污垢和油脂。
3. 测试检查3.1 进行机器人启动和关闭测试,确保机器人能够顺利地启动和关闭。
3.2 监测机器人的电力电压和电流,确保机器人的电源稳定。
3.3 对有问题的机器人部件,进行更换和维护。
结论防爆机器人是操作人员在高温、易燃易爆的工作环境下的重要设备。
通过制定安全操作规程和保养规程,可以确保员工的安全和机器人的正常运行,从而提高生产效率,维护企业利益。
排爆销毁器操作方法
排爆销毁器操作方法
排爆销毁器是一种用于排除爆炸物的危险物品的设备。
以下是一般的操作方法:
1. 穿戴个人防护装备:在操作排爆销毁器之前,必须穿戴适当的个人防护装备,如防爆服、防爆手套、防爆面罩等。
2. 确认安全区域:在操作排爆销毁器之前,必须确保周围的区域是安全的,没有其他人员或物品可能受到爆炸物的伤害。
3. 检查销毁器:仔细检查排爆销毁器的各个部分,确保其处于良好的工作状态,没有损坏或故障。
4. 配置设备:根据实际情况,配置排爆销毁器的设置和参数,如炸药量、引爆方式等。
5. 定位爆炸物:使用各种检测设备和工具,定位或确认爆炸物的位置和类型。
6. 移动爆炸物:根据专业指导,小心地将爆炸物从危险区域移动到安全区域。
7. 排除爆炸物:根据专业指导,使用排爆销毁器对爆炸物进行处理,以确保其没有危险。
8. 引爆销毁器:根据设备的操作说明,远离危险区域,使用遥控或其他相关设备引爆销毁器。
9. 监控爆炸物销毁过程:在销毁爆炸物的过程中,通过监控设备或其他方法,持续观察销毁过程,确保安全。
10. 清理和处理:在销毁完成后,及时清理和处理排爆销毁器,确保其处于正常的状态,并妥善存放。
以上是一般的排爆销毁器操作方法,具体的操作方法可能会因设备型号、爆炸物类型和专业要求等而有所不同。
使用排爆销毁器时,务必严格遵循相关操作规程和安全操作要求,确保操作人员和周围人员的安全。
Series MPS-400X爆炸耐性火警拉动机器人说明书

273 Branchport AvenueLong Branch, N.J. 07740(800) 631-2148Thank you for using our products.INSTALLATION INSTRUCTIONSSERIES MPS-400X EXPLOSION-PROOF FIRE ALARM PULL STATIONUse this product according to this instruction manual. Please keep this instruction manual for future reference.The Series MPS-400X Explosion Proof Manual Pull Station is UL and FM Listed for use in hazardous environments and for NEMA Type 4X weatherproof applications. The unit also complies with ADA Standards when installed at less than 48 inches above the floor for front wheelchair access and less than 54 inches for side wheelchair access. All installations must comply with local codes and regulations.Ratings: Listed By: UL, FM, CSFM, MEAEnclosures: Class I, Groups B, C and D, Class II, Groups E, F and G. Class IIIContacts: D.P.D.T. 10 Amps at 250VAC 1/2 Amp at 125VDCINSTALLATION:Please also refer to assembly diagram and installation notes.The Series MPS-400X station includes a front housing, backbox, a switch plate and all the necessary hardware to assemble the station.1.Install the backbox onto its mounting surface using the holes provided on the mounting tabs. The tabs are designed to accept ascrew size of up to 1/4-inch.2.The backbox is supplied with two 3/4-inch 14 NPT conduit entries. Threaded joints between conduit and backbox must be madewith a minimum of 5 threads fully engaged. Seal unused conduit entry with a 3/4-inch NPT pipe plug. All joints must be sealed using pipe thread sealing compound or Teflon tape and in accordance with the requirements for the particular installation.3.Connect the field wiring to the terminal blocks on the adapter plate. Use the insulated terminal plug supplied to ground the boxproperly. Each wire or terminal lug must be placed under its corresponding clamping plate for proper connection.4.Install the switch plate onto the backbox using the 4-1/4 -20 X 7/8 pan head screws provided. Make sure that the O-Ring seals onthe screws and around the edge of the switch plate are properly seated.5.Open the front housing, align its mounting plate with the pins provided on the switch plate and attach it using the two 6-32 screwsprovided into the slot holes.Copyright 2009 Cooper Wheelock Inc., dba Cooper Notification. All rights reserved.INSTALLATION DIAGRAM:Before beginning, verify that the supply is turned off. Take care not to scratch or damage the surfaces of the flange joint.1.Check to make sure that the flange surfaces arecompletely clean and free of scratches, debris and dust.2.Verify that the O-Rings seals on the 4-/7/8 screws and thegasket around the inside surface of the switch plate areproperly seated.3.Seal unused conduit entry with a 3/4-inch NPT plug.4.Connect the ground wire to the grounding screw in thebackbox.5.After tightening the 4 switch plate bolts, verify that a0.00015-inch feeler gauge does not penetrate more than1/8-inch at any point around the flange joint.Terminal Block LayoutCNCNO NONCC SHOWN IN THE UPRIGHT POSITIONLIMITED WARRANTYCooper Wheelock, Inc. dba Cooper Notification and Cooper Notification, Inc. (each, a “Seller”) products must be used within their published specifications and must be PROPERLY specified, applied, installed, operated, maintained and operationally tested in accordance with these instructions at the time of installation and at least twice a year or more often and in accordance with local, state and federal codes, regulations and laws. Specification, application, installation, operation, maintenance and testing must be performed by qualified personnel for proper operation in accordance with all of the latest National Fire Protection Association (NFPA), Underwriter’s Laboratories (UL), National Electrical Code (NEC), Occupational Safety and Health Administration (OSHA), local, state, county, province, district, federal and other applicable building and fire standards, guidelines, regulations laws and codes including, but not limited to, all appendices and amendments and the requirements of the local authority having jurisdiction (AHJ). Seller products when properly specified, applied, installed, operated, maintained and operationally tested as provided above are warranted against mechanical and electrical defects for a period of (a) three (3) years from date of manufacture with respect to MEDC and Seller Industrial Signals and Seller Fire and Security Notification Appliances and Devices, or (b) one (1) year from date of manufacture with respect to Waves and SafePath Voice Evacuation and Mass Notification Systems (date of manufacture is determined by date code.) Correction of defects by repair or replacement shall be at Seller’s sole discretion and shall constitute fulfillment of all obligations under this warranty. THE FOREGOING LIMITED WARRANTY SHALL IMMEDIATELY TERMINATE IN THE EVENT ANY PART NOT FURNISHED BY SELLER IS INSTALLED IN THE PRODUCT. THE FOREGOING LIMITED WARRANTY SPECIFICALLY EXCLUDES ANY SOFTWARE REQUIRED FOR THE OPERATION OF OR INCLUDED IN A PRODUCT. SELLER MAKES NO REPRESENTATION OR WARRANTY OF ANY OTHER KIND, EXPRESS, IMPLIED OR STATUTORY WHETHER AS TO MECHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE OR ANY OTHER MATTER.USERS ARE SOLELY RESPONSIBLE FOR DETERMINING WHETHER A PRODUCT IS SUITABLE FOR THE USER’S PURPOSES, OR WHETHER IT WILL ACHIEVE THE USER’S INTENDED RESULTS. THERE IS NO WARRANTY AGAINST DAMAGE RESULTING FROM MISAPPLIACATION, IMPROPER SPECIFICATION, ABUSE, ACCIDENT OR OTHER OPERATING CONDITIONS BEYOND SELLER’S CONTROL.SELLER DOES NOT WARRANT THAT THE OPERATION OF THE SOFTWARE WILL BE UNINTERRUPTED OR ERROR-FREE OR THAT THE SOFTWARE WILL MEET ANY OTHER STANDARD OF PERFORMANCE, OR THAT THE FUNCTIONS OR PERFORMANCE OF THE SOFTWARE WILL MEET THE USER’S REQUIREMENTS. SELLER SHALL NOT BE LIABLE FOR ANY DELAYS, BREAKDOWNS, INTERRUPTIONS, LOSS, DESTRUCTION, ALTERATION, OR OTHER PROBLEMS IN THE USE OF A PRODUCT ARISING OUT OF OR CAUSED BY THE SOFTWARE.THE LIABILITY OF SELLER ARISING OUT OF THE SUPPLYING OF A PRODUCT, OR ITS USE, WHETHER ON WARRANTIES, NEGLIGENCE, OR OTHERWISE, SHALL NOT IN ANY CASE EXCEED THE COST OF CORRECTING DEFECTS AS STATED IN THE LIMITED WARRANTY AND UPON EXPIRATION OF THE WARRANTY PERIOD ALL SUCH LIABILITY SHALL TERMINATE. SELLER IS NOT LIABLE FOR LABOR COSTS INCURRED IN REMOVAL, REINSTALLATION OR REPAIR OF A PRODUCT BY ANYONE OTHER THAN SELLER OR FOR DAMAGE OF ANY TYPE WHATSOEVER, INCLUDING BUT NOT LIMITED TO, LOSS OF PROFIT OR INCIDENTAL, INDIRECT, CONSEQUENTIAL, SPECIAL, PUNTIVE OR EXEMPLARY DAMAGES. THE FOREGOING SHALL CONSTITUTE THE SOLE REMEDY OF THE PURCHASER AND THE EXCLUSIVE LIABILITY OF SELLER.IN NO CASE WILL SELLER’S LIABILITY EXCEED THE PURCHASE PRICE PAID FOR A PRODUCT.LIMITATION OF LIABILITYSELLER’S LIABILITY ON ANY CLAIM OF ANY KIND, INCLUDING NEGLIGENCE AND BREACH OF WARRNTY, FOR ANY LOSS OR DAMAGE RESULTING FROM, ARISING OUT OF, OR CONNECTED WITH THIS CONTRACT, OR FROM THE MANUFACTURE, SALE, DELIVERY, RESALE, REPAIR OR USE OF ANY PRODUCT COVERED BY THIS ORDER SHALL BE LIMITED TO THE PRICE APPLICABLE TO THE PRODUCT OR PART THEREOF WHICH GIVES RISE TO THE CLAIM. SELLER’S LIABILITY ON ANY CLAIM OF ANY KIND SHALL CEASE IMMEDIATELY UPON THE INSTALLATION IN THE PRODUCT OF ANY PART NOT FURNISHED BY SELLER. IN NO EVENT SHALL SELLER BE LIABLE FOR ANY CLAIM OF ANY KIND UNLESS IT IS PROVEN THAT ITS PRODUCT WAS THE DIRECT CAUSE OF SUCH CLAIM. FURTHER, IN NO EVENT, INCLUDING IN THE CASE OF A CLAIM OF NEGLIGENCE, SHALL SELLER BE LIABLE FOR INCIDENTAL, INDIRECT, CONSEQUENTIAL, SPECIAL, PUNITIVE OR EXEMPLARY DAMAGES. SOME STATES DO NOT ALLOW THE EXCLUSION OR LIMITATION OF INCIDENTAL OR CONSEQUENTIAL DAMAGES, SO THE PRECEDING LIMITATION MAY NOT APPLY TO ALL PURCHASERS.6/09。
全部整合排爆机器人使用说明

全部整合排爆机器人使用说明关键信息:1、排爆机器人型号:____________________________2、操作权限:____________________________3、适用场景:____________________________4、维护周期:____________________________5、故障处理流程:____________________________11 引言本协议旨在为用户提供关于全部整合排爆机器人的详细使用说明,以确保其安全、有效地执行排爆任务。
111 排爆机器人概述排爆机器人是一种专门设计用于处理危险爆炸物的高科技设备,具备先进的传感器、机械臂和控制系统。
112 主要功能包括但不限于探测爆炸物、抓取和转移爆炸物、远程操控等。
12 操作前准备121 操作人员培训操作人员必须经过专业培训,熟悉机器人的操作流程和应急处理方法。
122 环境评估在使用前,对操作环境进行全面评估,确保无干扰因素影响机器人工作。
13 启动与连接131 电源接入按照正确的方式接入电源,并检查电源指示灯是否正常。
132 通信连接建立稳定的通信连接,确保操作人员与机器人之间的数据传输流畅。
14 操作界面介绍141 主控制界面详细说明各个控制按钮、参数显示区域的功能和含义。
142 监控画面解释监控画面中不同图像和数据的代表意义。
15 移动控制151 前进、后退、转弯操作明确操作指令对应的移动动作和速度控制方法。
152 越障能力及应对策略介绍机器人在遇到不同障碍物时的处理方式。
16 探测功能使用161 传感器类型及工作原理阐述机器人所配备的各类传感器,如红外、化学等传感器的工作原理。
162 探测模式选择根据不同的任务场景,选择合适的探测模式。
17 机械臂操作171 抓取动作控制精准控制机械臂的抓取力度和角度。
172 精细操作技巧如何进行微小物品的抓取和操作。
18 排爆流程181 发现爆炸物如何确认爆炸物的位置和类型。
浦喆电子科技排爆机器人说明

排爆机器人品牌:浦喆型号JXS-1河南浦喆电子科技排爆机器人符合《GA/T 142-1996排爆机器人》产品技术标准要求;参数名称参数指标整机外形尺寸不大于长1040mm×宽580mm×高560mm机器人重量:约80kg 负载能力:水平地面不小于50Kg行走速度:0-1m/s,远程控制无级变速转向半径:原地旋转机身航空级铝合金,精密加工爬坡、楼梯能力不小于35°(斜坡)、不小于30°(楼梯)跨沟宽度400mm 越障高度250mm 防护等级IP65,全天候工作时间2-4小时巡航(视不同速度)通讯无线100m可视距离有线100m摄像头前视、手爪上、手爪下、监控云台共4路红外CCD相机监控摄像头可控变焦,低照度、带红外滤除功能和红外光照明照明前视高亮LED,监控高亮LED传感器2路超声、1路陀螺仪、1路加速度计、1个GPS、3路温度传感器水炮接口提供水炮枪安装接口,可直接安装水炮枪及激光瞄准仪安全性带有刹车系统和急停开关电池动力电池与控制电池分离,动力电池36V,控制电池24V手臂模块化模块化设计,可以快速从车体上拆卸最大臂展1.6m 独立自由度6个独立自由度肩部旋转:360°肩部摆动:170°大臂摆动:210°小臂摆动: 180°爪旋转:360°连续爪张开:0-30cm 抓持能力最大15kg,水平展开6kg手爪配件可以选择四套快速更换的手爪及工具,更换方便快捷云台模块化设计,可以快速从车体上拆卸3个独立自由度云台旋转:360度连续云台俯仰:200°云台伸缩:20cm 防水、防尘、防爆镜头。
排爆机器人控制指令1
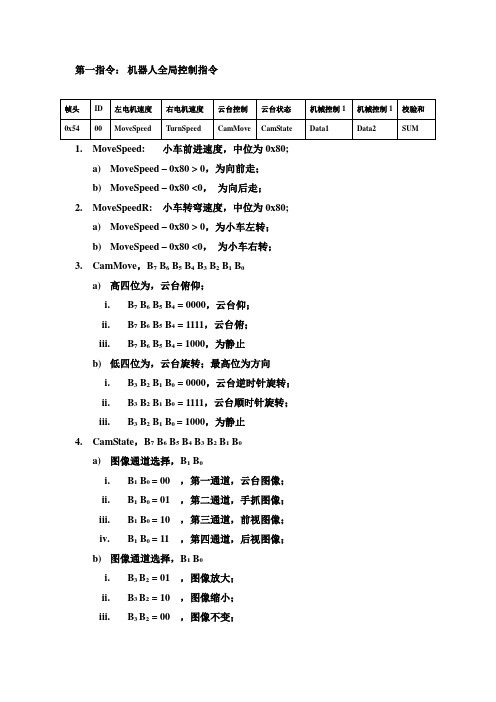
第一指令:机器人全局控制指令1.MoveSpeed: 小车前进速度,中位为0x80;a)MoveSpeed – 0x80 > 0,为向前走;b)MoveSpeed – 0x80 <0,为向后走;2.MoveSpeedR: 小车转弯速度,中位为0x80;a)MoveSpeed – 0x80 > 0,为小车左转;b)MoveSpeed – 0x80 <0,为小车右转;3.CamMove,B7 B6 B5 B4 B3 B2 B1 B0a)高四位为,云台俯仰;i.B7 B6 B5 B4 = 0000,云台仰;ii.B7 B6 B5 B4 = 1111,云台俯;iii.B7 B6 B5 B4 = 1000,为静止b)低四位为,云台旋转;最高位为方向i.B3 B2 B1 B0 = 0000,云台逆时针旋转;ii.B3 B2 B1 B0 = 1111,云台顺时针旋转;iii.B3 B2 B1 B0 = 1000,为静止4.CamState,B7 B6 B5 B4 B3 B2 B1 B0a)图像通道选择,B1 B0i.B1 B0 = 00 ,第一通道,云台图像;ii.B1 B0 = 01 ,第二通道,手抓图像;iii.B1 B0 = 10 ,第三通道,前视图像;iv.B1 B0 = 11 ,第四通道,后视图像;b)图像通道选择,B1 B0i.B3 B2 = 01 ,图像放大;ii.B3 B2 = 10 ,图像缩小;iii.B3 B2 = 00 ,图像不变;5.机械控制1,Data1, B7 B6 B5 B4 B3 B2 B1 B0a)ARM5,底盘旋转;i.B7 B6 = 10;底盘逆时针旋转;ii.B7 B6 = 01;底盘顺时针旋转;iii.B7 B6 = 11;静止;b)ARM4,大臂俯仰;i.B5 B4 = 10;大臂仰;ii.B5 B4 = 01;大臂俯;iii.B5 B4 = 11;静止;c)ARM3,小臂俯仰;i.B3 B2 = 10;小臂仰;ii.B3 B2 = 01;小臂俯;iii.B3 B2 = 11;静止;d)ARM2,手抓旋转;i.B1 B0 = 10;手抓逆时针旋;ii.B1 B0 = 01;手抓顺时针松开;iii.B1 B0 = 11;静止;6.机械控制2,Data2,B7 B6 B5 B4 B3 B2 B1 B0a)ARM1,手抓抓持;i.B1 B0 = 10;手抓抓持;ii.B1 B0 = 01;手抓松开;iii.B1 B0 = 11;静止;b)速度档位,B3 B2 = 0~3;c)灯光照明;i.B8 = 1;灯光亮;ii.B8 = 0;灯光灭;7.SUM为前面所有字节相加;。
最新排爆机器人说明书

排爆机器人使用手册(一)、关于本用户手册●如果未另加说明,方向说明如左、右、前、后通常指的是排爆机器人的行驶方向。
●插图用于帮助理解,也可视为原理图。
●由于部件根据客户反馈信息会在新产品中进行升级,所以部分操作元件的布置与插图中所示的布置或文本中的描述有所不同。
●本手册定稿后在排爆机器人平台上进行的技术更改信息在此不进行追述。
本手册中描述了所有装备和型号,没有标出特殊装备。
因此所描述的装备可能在本产品上未安装或仅在某些市场提供。
本产品设备信息请查阅销售资料。
本用户手册中的所有数据以定稿时的信息状态为准。
由于平台处在不断的开发中,因此排爆机器人与本用户手册中的说明之间可能存在偏差。
各个数据、插图或说明均不能作为提出任何要求的依据。
出售或出借本设备时,请确保设备应始终备有整套相关资料。
(二)、警告和免责申明操作本机前请详细阅读本说明书正式工作前请进行必要的培训和练习请严格按照培训工程师的教导进行操作请严格按照当地的安全法规进行操作如遇以上及使用不当等情况,所造成的损害或损伤,本公司概不负责。
(三)、产品使用注意事项1.本机不可涉水、淋雨。
2.不可充电时工作。
3.大臂复位时需在机体中间位置。
4.当机器复位时,云台主摄像机旋转到与机器人水平90度再复位。
5.操作腰盘时大臂提高至少15°。
6.手爪复位时不能旋转。
7.原地旋转时应保持360°以内。
8.手爪严禁接触地面。
9.操作时匀速推动摇杆,禁止瞬时反向操作,反向操作需间隔1秒。
10.不可同时操作多项功能。
11.当操作动作限位后,不可持续操作。
12.在干燥环境下储存,不得在其上放置任何物品。
13.当电量低于20%禁止使用。
14.胎压不得低于1.0KG/CM²。
15.控制箱与机器人充电器不得混用。
16.未经专业工程师的指导,不得随意拆卸机器人机体内部所有部件。
17.在拖拽汽车时,汽车不可拉手刹与挂档。
18.严禁拨动机器人机身电台拨钮。
排爆机器人操作手册
目录第一章上位机遥控箱介绍 (3)1.1 面板介绍 (3)1.2 界面介绍 (4)第二章排爆机器人操作说明 (6)2.1 监视及显示查看 (6)2.1.1 指示灯显示 (6)2.1.2 视频显示 (6)2.1.3 报警错误消息提示 (7)2.1.4 设置的速度显示 (7)2.1.5 各轴位置及使能情况显示 (8)2.1.6 机械臂末端速度显示 (10)2.2 初始化与清错操作 (10)2.3 上下使能操作 (11)2.4 模式切换操作 (12)2.5 暂停、急停及复位操作 (13)2.6 机器人运动全局速度设置 (13)2.7 车体运动操作 (14)2.7.1 单轴运动操作 (14)2.7.2 车体行进转向操作 (14)2.8 摆臂运动操作 (15)2.8.1 单轴运动操作 (15)2.8.2 分组控制操作 (15)2.8.3 耦合控制操作 (16)2.9 机械臂运动操作 (16)2.9.1 机械臂点动操作 (16)2.9.2 末端平动控制 (17)第三章日常故障及处理 (18)3.1 网络通讯故障 (18)3.2 电压不足 (18)第四章技术参数 (18)4.1主要技术指标 (18)第一章上位机遥控箱介绍1.1面板介绍总电源开关:通过该开关控制排爆箱总电源的开和关。
电脑启动按钮:通过该按钮来启动和关闭排爆箱电脑。
有线无线开关:通过该开关来切换排爆机器人为有线或无线控制方式。
紧停旋钮:通过选择紧停按钮来停止和恢复下位机运行。
手控制摇杆:控制机械臂手末端运动。
车控制摇杆:控制车体行进转向。
1.2界面介绍清错、配置及模式切换区域:进行异常处理、机器人上下使能、机器人暂停、急停及复位和模式切换。
视频切换区域:进行视频显示控制。
云台控制区域:进行云台运动控制。
报警错误及消息提示区域:实时显示下位机当前错误信息。
指示灯区域:显示网络通讯、使能、错误和抱闸状态信息。
机器人模型显示区域:通过机器人模型实时显示机器人摆臂及机械臂位置。
多功能模块化排爆机器人设计使用说明
第一届xxx机械创新设计大赛作品说明书多功能模块化排爆机器人参赛学校xxxx参赛学员 xxxx指导教员 xxxx摘要:地面无人作战平台在现代战争中已经开始扮演着重要的角色,国内外都在对此进行研究。
本文依据自主设计并制作的多功能模块化排爆机器人(样机)和相关的战场适应性能试验,主要研究了模块化设计理念在我军未来无人作战装备中的具体实现方案和采用模块化理念设计的无人作战平台对战场、战争环境的适应性。
为未来我军无人化装备的设计和生产提供了有益的借鉴。
关键词:模块化、多功能、排爆、机器人、无人化一、设计背景目前国内外恐怖主义猖獗,活动类型多样,在很多地区还存在着大量恐怖分子遗留的爆炸物。
由于人工排爆存在巨大危险性,排爆机器人已成为反恐作战的重要装备之一。
在国外,美军提出并实施了“联合机器人计划”(JRP),国防高级研究计划局提出了“战术移动机器人”(TMR)、“未来战斗系统”(FCS)、无人地面战车等项目,目前有100多项战斗任务可由机器人承担,如机器人弹药装填手、机器人排雷车、火力支援机器人等。
美、英、德、法及日本等国均已经研制出多种型号的地面无人作战平台,有的已在波黑战争和伊拉克战争中使用。
除上述国家外,其他国家也在开展地面无人作战平台的研制工作,如加拿大的“改进型地雷探测计划”,意大利、法国和西班牙联合开展的“先进移动机器人”项目,瑞士的Pemex轮式地面无人平台项目,比利时的HUDEM项目,西班牙的“罗德”轮式地面无人平台以及俄罗斯的“越野车”-M3超轻型移动式机器人等。
排爆机器人是目前较具研究价值的机器人产品,在反恐怖斗争领域可用来执行诸如反恐排爆的任务,战场上排爆机器人则用以执行诸如排除爆炸物,战场信息收集的任务;稍加改造,即可加装单兵武器用于武装巡逻、战斗值勤等高危险任务。
基于军用机器人产品系列化、通用化的需要,在小型移动平台基础上,提出并制作了多功能模块化排爆机器人,其包括履带式底盘、机械手臂、控制系统、侦察系统等,集模块化、多功能、自动控制于一体,可用于各种复杂、危险情况下的可疑危险物品的清理作业,以及代替现场安检人员实地勘察,实时传输现场图像。
力升高科耐高温消防机器人产品系列手册说明书

让生命不再冒险力升高科耐高温消防机器人产品系列让生命不再冒险0102证书 / CERTIFICATE企业营业执照国家高新技术企业中关村高新技术企业中关村金种子企业中国消防协会会员北京消防协会单位会员资信证书甘肃省建筑业联合会直属会员单位2019中国国际消防设备技术交流展览会创新产品2021中国国际消防设备技术交流展览会创新产品应急科技先进装备证书北京市新技术新产品证书兰州科技成果博览会优秀产品金奖第十届中国消防协会科学技术创新奖▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎全球智能应急装备大赛应急救援机器人赛道大奖第二十三届中国国际高新技术成果交易会优秀产品奖2021年度中国消防行业应急救援领军品牌北京物联网智能技术应用协会会员单位新型基础设施建设产品与服务认定证书ISO质量体系认证ISO环境体系认证ISO职业健康安全认证AAA级企业资信等级证书AAA级质量服务诚信企业AAA级诚信经营示范单位企业信用等级证书诚信供应商企业荣誉资质力升高科多年以来重视产品的创新从研发到生产由资深技术人员一道道把关根据市场变动趋势,推出符合市场需求的高标准产品在不断的努力下,我们获得了多方面认可这些都已成为力升高科登上更高目标的阶梯 03专利证书让生命不再冒险0405划时代的创新技术技术创新力升高科历经四年潜心研发,推出1000℃耐高温消防机器人系列产品,突破以往消防装备的作战区域限制,不仅能在火场外围常温区域作业,还能进入火场核心高温危险区域,具有全范围能攻善守的作战能力,针对火场高温燃烧区域的火情侦察、灭火降温、保护人员等作战任务具有四个“零距离”优势,扩展了救援人员的作战能力,保障消防战士人身安全,让生命不再冒险。
耐高温防护技术基于瞬态传热仿真及大量实验分析优化的多层变组分隔热瓦,针对性分区域传热抑制设计,有效抑制外部 热辐射、热传导及层间热辐射。
拓扑优化网格支撑复合壳体结构,轻量化、抗蠕变。
高性能防水柔性密封系统。
电子放炮机的操作方法

电子放炮机的操作方法电子放炮机是一种现代化的科技产品,用于放射声光、烟雾、火花等效果,常用于舞台演出、庆典活动和烟火表演等。
以下是电子放炮机的详细操作方法。
1. 必要准备工作:- 确保所使用的电子放炮机处于正常工作状态,检查是否有损坏或部件松动等情况。
- 确保放炮机的电源接口与电源插座相匹配,并将电源线插入电源插座。
2. 放炮机设置:- 打开放炮机的电源开关,启动放炮机。
一般来说,放炮机都会附带有操作面板或者遥控器,可以通过操控面板或者遥控器来对放炮机进行设置。
- 按照放炮机的说明书或者标签上的操作指南,设置所需的炮弹类型、音量、亮度等参数。
3. 设置炮弹类型:- 按照放炮机的说明书或者标签上的操作指南,选择所需的炮弹类型。
一般来说,电子放炮机可以模拟出爆炸声、闪光灯、烟雾、火花等效果。
- 设置炮弹类型的操作方法可能因不同的放炮机而异,但通常是通过操控面板或者遥控器上的按键或旋钮来实现。
4. 设置音量和亮度:- 按照放炮机的说明书或者标签上的操作指南,调节放炮机的音量和亮度。
音量调节可以通过操控面板或者遥控器上的音量按键或旋钮来实现,亮度调节可以通过操控面板或者遥控器上的亮度按键或旋钮来实现。
- 根据实际需求,适时调节音量和亮度,以达到想要的效果。
需要注意的是,根据舞台或者活动现场的大小和环境光照情况合理设置音量和亮度,避免过于刺眼或者过于吵闹。
5. 发射炮弹:- 确保所有的设置都已经完成,并且放炮机的准备状态良好。
可以通过查看面板或者遥控器上的指示灯来确认放炮机是否处于工作状态。
- 按下面板或者遥控器上的发射按键,即可发射相应的炮弹。
在发射过程中,可以通过面板或者遥控器上的其他按键进行停止或暂停操作。
- 避免过度连续发射,尤其是在人群密集的场合。
要根据实际需要和安全规定来设置发射频率和炮弹数量。
6. 动作终止:- 在活动结束后或需要停止放炮机时,可以按下面板或者遥控器上的停止按键,即可停止放炮机的工作。
mk5排爆服说明书
MK5 排爆服使用说明版本号2013年6月组成要素排爆服主要部件配件目录保养及保存MK5 排爆服有五个组成要素裤子脊柱保护器工作服防护板头盔所有上述部件必须按照下述章节顺序穿戴才能保证正确的穿上此套排爆服。
1.裤子准备工作将双腿拉链拉下并解开尼龙搭扣。
使双腿完全松开。
:将绑带绕过肩膀使裤子松垮的挂在身上(图1):调整绑带到适合的长度并系上腰部带子(图2):拉上双腿拉链(图3):粘好双腿上的尼龙搭扣(图4):把脚穿进鞋套,通过尼龙搭扣粘好(图5):粘好双脚踝后面的尼龙搭扣(图6)2.脊柱保护器:将脊柱保护器放在后背并将肩带拉过肩膀,同时将腰带环过腰部;先扣紧腰带(图7):粘好弹性肩带(图8):将脊柱保护器调整到适当位置(图9)3 .工作服:先把右手臂放进袖子将工作服环过后背再插入左手臂(图10):粘好肩膀上的尼龙搭扣(图11):粘好左手臂下的尼龙搭扣(图12):扣好手部保护板的纽扣(图13a):将手伸入尼龙搭扣调整好位置(图13b)4.防护板此套排爆服提供三块单独的钢制防护板为腹股沟、胸部及喉部提供额外的保护。
:将排爆服的肩部搭扣对准防护板的搭扣并扣好。
然后将腰部搭扣对准防护板搭扣并扣好(图14):将喉部防护板上的尼龙搭扣与排爆服领口前部的尼龙搭扣粘好并调整肩带(图15):将搭扣绕过腿部扣好(图16):将上下两根紧急逃脱带粘帖在防护板前面(图17)6.电源包NB 电池被单独运输,放置在头盔包中:解开尼龙搭扣,取下盖子,去掉接线端的安全罩。
将电线接通(图18):扣上电池盖并将尼龙搭扣扣好(图19):将电池安置在排爆服后面的口袋里。
将电池上的三孔插头插入口袋中的插口。
现排爆服已通好电,遥控器上的绿色LED指示灯亮起。
电池上的备用接口是为水冷服供电的。
电池上没有开关。
:给电池充电时将充电插座与电池上的单孔插头相连。
(图21)请注意参照单独的电池充电使用说明以便正确地为电池充电。
5:头盔解开双侧领口并掰开。
机器人现场操作手册
现场操作手册1. 介绍1.1 目的和范围此文档旨在提供关于现场操作的详细指导,包括安全要求、设备设置、程序运行等内容。
1.2 定义和缩写词汇表2. 安全要求在进行任何操作之前,请务必遵守以下安全要求:- 确保所有相关工作区域清洁整齐,并消除可能引起危险或事故发生的障碍物;- 使用适当个体防护装备(如头盔、耳塞)以及所需其他防护措施;- 阅读并理解每台的用户手册,并按照其中规定执行相应步骤。
3. 设备准备与设置在开始使用之前,请确保完成以下任务:a) 检查电源连接是否正确且稳定;b) 根据需要调整各轴位置限制开关以及传感器参数;4.程序加载与启动要成功地加载并启动一个程序,请按照下列步骤进行:i) 将U盘插入主控箱USB接口中;ii)打开系统界面,在菜单栏选择“文件”- “载入程序”;iii)选择所需的程序文件并“载入”,等待加载完成;5. 操作在进行操作时,请遵循以下步骤:a) 确保工作区域内没有其他障碍物或危险品;b) 检查所有传感器和执行部件是否正常运行,并确保它们与主控箱连接良好。
6.故障排除如果在使用过程中出现任何问题,您可以尝试以下解决方法: - 关闭系统并重新启动;- 查看错误日志以获取更多信息。
7. 维护与清洁定期维护和清洁是确保长时间稳定运行的关键。
请按照用户手册提供的指导进行相应维护工作。
8.法律名词及注释- 法律名词1: 根据《劳动安全法》,雇主有责任为员工提供必要个体防护装备来减少潜在风险。
- 注释1: 动态调整轴位置限制开关可根据实际需要设置每个轴移动范围上下限值。
9. 本文档涉及附件:[相关附件名称]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录
第一章上位机遥控箱介绍 (3)
1.1 面板介绍 (3)
1.2 界面介绍 (4)
第二章排爆机器人操作说明 (6)
2.1 监视及显示查看 (6)
2.1.1 指示灯显示 (6)
2.1.2 视频显示 (6)
2.1.3 报警错误消息提示 (7)
2.1.4 设置的速度显示 (7)
2.1.5 各轴位置及使能情况显示 (8)
2.1.6 机械臂末端速度显示 (10)
2.2 初始化与清错操作 (10)
2.3 上下使能操作 (11)
2.4 模式切换操作 (12)
2.5 暂停、急停及复位操作 (13)
2.6 机器人运动全局速度设置 (13)
2.7 车体运动操作 (14)
2.7.1 单轴运动操作 (14)
2.7.2 车体行进转向操作 (14)
2.8 摆臂运动操作 (15)
2.8.1 单轴运动操作 (15)
2.8.2 分组控制操作 (15)
2.8.3 耦合控制操作 (16)
2.9 机械臂运动操作 (16)
2.9.1 机械臂点动操作 (16)
2.9.2 末端平动控制 (17)
第三章日常故障及处理 (18)
3.1 网络通讯故障 (18)
3.2 电压不足 (18)
第四章技术参数 (18)
4.1主要技术指标 (18)
第一章上位机遥控箱介绍
1.1面板介绍
➢总电源开关:通过该开关控制排爆箱总电源的开和关。
➢电脑启动按钮:通过该按钮来启动和关闭排爆箱电脑。
➢有线无线开关:通过该开关来切换排爆机器人为有线或无线控制方式。
➢紧停旋钮:通过选择紧停按钮来停止和恢复下位机运行。
➢手控制摇杆:控制机械臂手末端运动。
➢车控制摇杆:控制车体行进转向。
1.2界面介绍
➢清错、配置及模式切换区域:进行异常处理、机器人上下使能、机器人暂停、急停及复位和模式切换。
➢视频切换区域:进行视频显示控制。
➢云台控制区域:进行云台运动控制。
➢报警错误及消息提示区域:实时显示下位机当前错误信息。
➢指示灯区域:显示网络通讯、使能、错误和抱闸状态信息。
➢机器人模型显示区域:通过机器人模型实时显示机器人摆臂及机械臂位
置。
➢全局速度设置区域:设置机器人运动的速度百分比。
➢当前速度及末端速度显示区域:显示设置的机器人运动的速度百分比。
➢车点动、手点动及摆臂控制区域:控制车点动、手点动及摆臂点动、分组控制及耦合控制。
➢车、摆臂、机械臂各轴位置和使能显示区域:显示车、摆臂机械臂各轴的位置值和使能情况。
➢机械臂末端速度显示区域:显示机械臂末端相对于基坐标系的速度。
第二章排爆机器人操作说明
2.1监视及显示查看
2.1.1指示灯显示
➢网络通信:绿灯表示上位机与下位机网络通讯正常,红灯表示上位机与下位机网络通讯故障。
➢错误:绿灯表示机器人状态机不存在任何错误,红灯表示机器人状态机存在错误。
➢使能:绿灯表示机器人所有轴都使能,红灯表示并非机器人所有轴都已使能。
2.1.2视频显示
排爆机器人上装有四个网路摄像头,包括车体前方摄像头,车体后方摄像头,云台摄像头,机械臂摄像头。
➢四宫格:表示以四宫格的形式显示四个摄像头画面。
➢视频1:以全屏方式显示视频1。
➢视频2:以全屏方式显示视频2。
➢视频3:以全屏方式显示视频3。
➢视频4:以全屏方式显示视频4。
2.1.3报警错误消息提示
报警错误消息提示显示框主要是显示下位机当前错误类型,当类型为无时表示当前没有任何错误,否则,对于不同的错误类型,将会有相应的文字提示信息。
2.1.4设置的速度显示
➢当前速度:显示运动的全局速度百分比,即设置的速度占最大速度的百分比。
2.1.5各轴位置及使能情况显示
➢位置:显示车体、摆臂及机械臂各轴的位置角。
➢使能:显示车体、摆臂及机械臂各轴的使能情况。
红灯表示没有使能,绿灯表示已经使能。
2.1.6机械臂末端速度显示
➢机械臂末端X轴速度:显示机械臂末端相对于基坐标系X方向移动的线速度。
➢机械臂末端Y轴速度:显示机械臂末端相对于基坐标系Y方向移动的线速度。
➢机械臂末端Z轴速度:显示机械臂末端相对于基坐标系Z方向移动的线速度。
➢机械臂末端Alpha速度:显示机械臂末端相对于基坐标系Alpha角速度。
➢机械臂末端Beta速度:显示机械臂末端相对于基坐标系Beta角速度。
➢机械臂末端Gamma速度:显示机械臂末端相对于基坐标系Gamma角速度。
2.2初始化与清错操作。