backaudio二次开发通讯协议
基于工业云台视频监控终端二次开发平台的设计
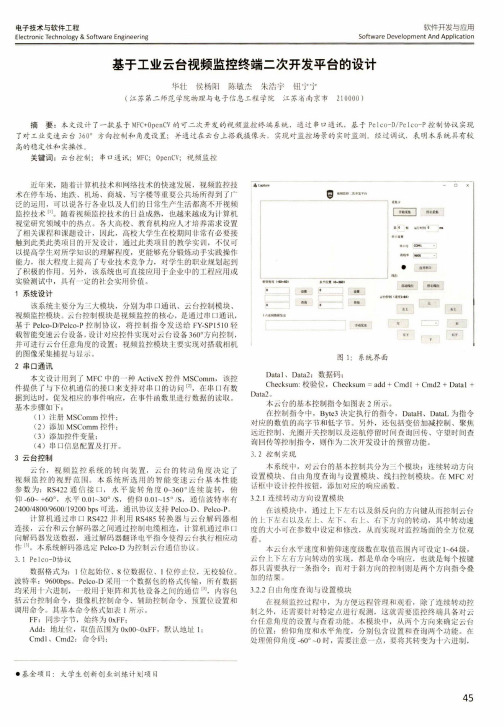
电子技术与软件工程Electronic Technology & Software Engineering软件开发与应用Software Development And Application基于工业云台视频监控终端二次开发平台的设计华壮侯杨阳陈敏杰朱浩宇钮宁宁(江苏第二师范学院物理与电子信息工程学院江苏省南京市210000 )摘要:本文设计了一款基于M F C+OpenCV的可二次开发的视频监控终端系统,通过串口通讯,基于Pelco-D/Pelco-P控制协议实现 了对工业变速云台360。
方向控制和角度设置;并通过在云台上搭栽摄像头,实现对监控场景的实时监测。
经过调试,表明本系统具有较 高的稳定性和实操性。
关键词:云台控制;串口通讯;M F C;OpenCV;视频监控近年来,随着计算机技术和网络技术的快速发展,视频监控技 术在停车场、地跌、机场、商城、写字楼等重要公共场所得到了广 泛的运用,可以说各行各业以及人们的日常生产生活都离不开视频 监控技术[11。
随着视频监控技术的日益成熟,也越来越成为计算机 视觉研究领域中的热点。
各大高校、教育机构应人才培养需求设置 了相关课程和课题设计,因此,高校大学生在校期间非常有必要接 触到此类此类项目的开发设计,通过此类项目的教学实训,不仅可 以提高学生对所学知识的理解程度,更能够充分锻炼动手实践操作 能力,很大程度上提高了专业技术竞争力,对学生的职业规划起到 了积极的作用。
另外,该系统也可直接应用于企业中的工程应用或 实验测试中,具有一定的社会实用价值。
1系统设计该系统主要分为三大模块,分别为串口通讯、云台控制模块、视频监控模块。
云台控制模块是视频监控的核心,是通过串口通汛,基于Pelco-D/Pelco-P控制协议,将控制指令发送给FY-SP15丨0轻 载智能变速云台设备,设计对应控件实现对云台设备360°方向控制,并可进行云台任意角度的设置;视频监控模块主要实现对搭载相机 的图像采集捕捉与显示。
K70 字库卡二次开发协议 - LED控制卡

9
文字内容编码
N
文字播放方式列表 序号 方式代码
1
0x01
2
0x02
3
0x03
4
0x04
5
0x05
名称
左移 静止 右移 上移 下移
BYTE
英文字符、数字为 ASCII,汉 字为汉字的机器内码 (GB2312 码)
描述
四、亮度设置
命令字:0x42
数据内容:亮度参数数量+亮度设定集合
序号
内容
长度
1
亮度参数数量
1
2
亮度设定集合
3*N
类型 BYTE BYTE
备注 1-10 见亮度集合表
亮度设定:包含多个时段的亮度设定,分别设定开始时间和设定的亮度
序号
内容
长度 类型
备注
1
开始时间
2
BCD 码 设置时分,12:30 表示为 0x12 0x30
2
亮度
1
BYTE 亮度 1-9,其中 9 表示自动调节,选
1-8,数值越大,亮度越低
区域信息[文字]的结构
序号 内容
1
区域位置
2
播放方式
3
字体名称
4
字体大小
5
字体颜色
6
显示速度
7
停留时间
8
文字的长度
长度 4*2 1 1 1 1
类型 BYTE BYTE BYTE BYTE BYTE
1
BYTE
1
BYTE
2
WORD
备注 左、上、宽、高 见播放方式表 0-宋体;1-黑体 0-16x16; 1-24x24; 2-32x32; b0 红色 b1 绿色 b2 蓝色 为 1 时有效 N 毫秒移动 1 个像素点;N10ms 为 单位 1-N 单位秒 表示后续信息文本的长度; 最长为 128
二次开发串口通信协议

LSC系列控制板通信协议V1.1串口通信,波特率9600帧头数据长度指令参数0x55 0x55 Length Cmd Prm 1…Prm N帧头:连续收到两个0x55 ,表示有数据包到达。
数据长度:等于参数个数N 加一个指令加数据长度本身占用的一个字节长度,即数据长度Length等于参数N + 2指令:各种控制指令参数:除指令外需要补充的控制信息。
一:用户主动给控制板发送数据部分用户的发送数据引脚接到控制板的RX插针上,当然用户的控制系统还要跟控制板进行共地(GND),如果用户发送正确数据到控制板,那么控制板上的蓝色LED2灯会闪一下,表明已经接收到正确数据。
如果发送的是错误数据,那么蓝色LED2灯不会有任何反应,保持常亮,蜂鸣器会“滴,滴”响两声,提示用户发送数据错误1. 指令名CMD_ SERVO_MOVE 指令值3 数据长度Length:说明:控制任意个舵机的转动,数据长度Length =控制舵机的个数×3+5参数1:要控制舵机的个数参数2:时间低八位参数3:时间高八位参数4:舵机ID号参数5:角度位置低八位参数6:角度位置高八位参数......:格式与参数4,5,6相同,控制不同ID的角度位置。
举例:1,比如控制1号舵机在1000ms内转到2000的位置帧头数据长度指令参数0x55 0x55 0x08 0x03 0x01 0xE8 0x03 0x01 0xD0 0x07 2,比如控制2和9号舵机在800ms内2号转到1200的位置,9号转到2300的位置帧头数据长度指令参数0x55 0x55 0x0B 0x03 0x02 0x20 0x03 0x02 0xB0 0x04 0x09 0xFC 0x08 2. 指令名CMD _ACTION_GROUP_RUN 指令值6 数据长度(Length)值:5说明:控制动作组运行,前提是该动作组已经下载到控制板。
可以控制动作组运行的次数,如果想让该动作组一直运行,则次参数值为0代表无限次参数1:要运行的动作组的编号参数2:动作组要运行的次数低八位参数3:动作组要运行的次数高八位举例:1,比如控制8号动作组运行1次帧头数据长度指令参数0x55 0x55 0x05 0x06 0x08 0x01 0x002,比如控制2号动作组运行无数次帧头数据长度指令参数0x55 0x55 0x05 0x06 0x02 0x00 0x003. 指令名CMD _ACTION_GROUP_STOP 指令值7 数据长度(Length)值:2说明:停止正在运行的动作组。
接口二次开发文档

二次开发接口说明目录短信二次接口技术 (2)支持多种操作体统:WINDOWS、LINUX、UNIX (2)支持多种开发语言: C#、VB、delphi、VC++、ASP、JAVA、.NET 等 (2)支持多种开发方式:Web Service、Http协议、数据库引擎 (2)Web Service接入模式 (3)注册接口Reg (3)更改密码UpPwd (4)修改注册信息 UpdReg (5)查询余额SelSum (6)发送短信 Send (7)群发短信 BatchSend (9)接收短信 Get (10)帐号充值 ChargeUp (12)注销 UnReg (13)彩信余额查询 BalanceMMs (14)群发彩信接口 BatchSendMMS (14)群发错误接口 GetReportFailMMS (15)彩信充值接口 ChargeUpMMS (15)彩信接收接口 GetMMS (16)彩信发送接口 SendMMS (16)代理商增减条数 AgentChangeAccount (17)代理商下面客户注册 AgentMakeAccount (17)Http接入模式 (18)注册接口Reg (18)更改密码UpPwd (18)修改注册信息 UpdReg (19)查询余额SelSum (19)发送短信 Send (20)接收短信 Get (21)帐号充值 ChargeUp (21)注销 UnReg (22)彩信查询余额 BalanceMMS (22)彩信群发接口 BatchSendMMS (22)彩信群发错误报告接口 GetReportFailMMS (23)彩信充值接口 ChargeUpMMS (24)彩信接收接口 GetMMS (24)彩信发送接口 SendMMS (24)代理商增减条数 AgentChangeAccount (25)代理商下面的客户注册 AgentMakeAccount (25)数据库接口 (26)Mobilesend消息发送表 (27)MobileGet消息接收表 (27)SQL脚本创建表代码: (28)MmsSEND消息发送表 (29)MmsGet消息接收表 (30)SQL脚本创建表代码: (30)短信二次接口技术随着移动商务应用和3G无线技术的加速普及和深入发展与用户需求的变化,短信用户群由时尚人群不断向企业、行业用户扩展。
AutoCAD2010二次开发环境搭建

AutoCAD2010二次开发环境搭建(ObjectARX2010 、VC++2008)本文以AutoCAD2010、开发包ObjectARX2010、VC++2008为例,详细介绍其二次开发前期工作,包括环境搭建、简单的例子等。
一、首先安装AutoCAD2010中文版和VS2008二、安装ObjectArx2010直接打开解压缩到某个目录即可。
比如D:\Program Files\ObjectARX_2010_32_64bit 然后打开D:\ProgramFiles\ObjectARX_2010_32_64bit\utils\ObjARXWiz目录,运行ArxWizards.msi程序,这样在新建C++项目的时候会出现ObjectARX项目,如图所示:向导创建过程中,除MFC Support选择支持外,其余默认即可,点击Finish 完成创建。
如下图:三、包含文件打开“工具->选项->项目和解决方案->VC++目录”选项,如图所示:添加包含文件( 图中红线部分目录即可):添加包含库文件(图中红线部分目录即可):四、简单例子以上开发环境搭建完毕,再举一个简单例子。
1.新建Object项目后打开acrxEntryPoint.cpp,点击左上角的图标(一个未知问题导致我的小图标不显示,但是不影响创建)弹出ObjectARXCommands。
2.在ObjectARX Commands中右键新建(New)一个命令,只需要修改International Name与Localized Name即可,例如_MyTest和MyTest 。
3.添加完成后,会在acrxEntryPoint.cpp中自动添加一句代码,然后在里面可以添加自己需要的代码,比如弹出一个对话框的代码:AfxMessageBox(L"This is my test");然后生成解决方案。
如下图:4.加载与运行运行AutoCAD2010,输入命令Ap或者管理目录下的“加载应用程序”加载在项目中win32\debug目录下的ArxProject2.arx文件。
YAV USB 采集卡二次开发即 DLL 使用手册说明书

YAV USB接口采集卡二次开发及DLL使用手册武汉亚为电子科技有限公司2020.05USB60001目录版本说明 (3)64位开发平台使用方法 (3)函数说明 (3)查找设备FindDevice (3)打开设备OpenYavDevice (4)读取数据GetYavData (4)配置设备SetYavParam (5)单次读取数据GetYavOnce (6)单次设置数据SetYavOnce (7)获取传感器数据YavSencer (7)获取感应器状态YavDI (7)关闭设备CloseYavDevice (8)配置命令 (9)加载流程 (11)多卡同步使用 (12)SDK及例程 (13)labview例程 (13)VC例程 (13)C#例程 (13)Matlab例程 (18)Delhpi例程 (18)其他平台例程 (19)23YAV USB 接口采集卡 二次开发及DLL 使用手册武汉亚为电子科技有限公司版本说明版 本 号:ADIO86.dll(32位开发平台)/ADIO64.dll(64位开发平台),V20180115适用范围:带有YAV 标识,或者武汉亚为电子科技有限公司产品标注,且具备USB (包括但不限于方口USB 、Micro USB )通信功能的采集卡,均可利用本指南。
特别声明:该指南适应于2017年9月1日之后YAV 采集卡64位开发平台使用方法YAV USB 接口的采集卡,无需安装驱动,可利用ADIO86.dll 与其他开发平台产生数据交互,dll 基于VS2010开发。
部分操作系统加载dll 时出错,需msvcr100d.dll 、msvcr120d.dll 配合使用,直接放ADIO86.dll 同文件夹下即可,如果是64位开发平台(注意:64位操作系统如果用的是32位开发平台,依然需要使用ADIO86版本),可ADIO64.dll 改名为ADIO86.dll ,替换并重启软件。
YAV 串口采集卡二次开发通信指令即Mobbus RTU(寄存器)手册DAM7000
YAV串口采集卡二次开发ModbusRTU指令使用说明
DAM7000
武汉亚为电子科技有限公司
2018.01
YAV串口采集卡二次开发
Modbus RTU指令使用说明
版本号:V201708
适用范围:带有YAV标识,或者武汉亚为电子科技有限公司产品标注,且具备串口(包括RS232/RS485或具备Modbus RTU功能的无线或者网口)接口的采集卡,均可利用本指南。
特别声明:该指南仅适应于2017年7月1日之后YAV采集卡,不同功能的采集卡,请根据硬件说明书功能在以下表格中查找对应寄存器。
部分寄存器不对客户开放。
A.DI离散输入寄存器状态读取(功能码:0x02H)
用于读取DI状态
用于读取或者控制DO状态
C.输入寄存器(功能码:0x04H)
用于读取采集卡采集的物理数据,默认小数位3,可设置,例如AI,DI,测频计数等。
D.保持寄存器(功能码:0x03H(读)、0x06H(写)、0x10H(连续写))
用于读取采集卡采集的数据,例如AI,DI,测频计数等,设置采集卡状态等。
主要寄存器:
辅助寄存器:三、LabVIEW 例程
程序框图中重要参数不可调节,否则会引起系统崩溃,尤其是注明不可修改的部分。
框图仅供参考,如有更新,恕不另行通知。
四、
VC 例程
五、C#
六、其他平台
参考“亚为串口采集卡ModbusRTU 与组态和PLC 通信说明书”等资料。
注意输入数据的格式。
智嵌物联 4G 系列产品二次开发说明书

智嵌物联4G系列产品二次开发说明书深圳总部地址:广东省深圳市宝安区新桥街道新桥社区新和大道6-18号1203网址:电话:*************北京办事处地址:北京市房山城区德润街6号院8号楼3层电话:182****5439天猫店铺淘宝店铺京东店铺微信公众号公司官网修订历史目录1. 二次开发流程 (1)1.1 开发流程 (1)1.2 智嵌物联4G产品线命名规则 (2)1.2.1 智嵌物联4G RTU产品线命名规则如图1.1所示 (2)1.2.2 智嵌物联4G DTU产品线命名规则如图1.2所示 (2)1.2.3 相关资料下载: (2)2. 搭建开发环境 (3)2.1 硬件连接并对设备参数进行配置 (3)2.1.1 硬件连接 (3)2.1.2 下载二次开发资料 (3)2.1.3 配置设备网络参数 (4)2.2 用户编程 (5)2.2.1 安装Source Insight (5)2.2.2 新建工程 (5)2.3 编译生成app.bin文件 (6)2.4 下载app.bin文件 (7)2.5 异常情况处理 (7)2.5.1 下错程序致使设备无法正常下载程序 (7)3. 函数库说明 (9)3.1.1 zq_recv_cb (9)3.1.2 zq_set_recv_cb (9)3.1.3 zq_get_net_status (9)3.1.4 zq_get_serverA_status (9)3.1.5 zq_get_serverB_status (10)3.1.6 zq_get_mqtt_status (10)3.1.7 zq_iot_network_get_CSQ (10)3.1.8 zq_serverA_send (10)3.1.9 zq_serverB_send (11)3.1.10 zq_mqtt__send (11)3.1.11 zq_uart_write (11)3.1.12 zq_get_Y (11)3.1.13 zq_get_X (12)3.1.14 zq_set_Y (12)3.1.15 zq_get_ADC (12)3.1.16 zq_sleep (13)3.1.17 zq_create_timer (13)3.1.18 zq_start_timer (13)3.1.19 zq_stop_timer (13)3.1.20 void zq_restart (14)3.1.21 int zq_msg_send (14)3.1.22 int zq_flash_erase (14)3.1.23 int zq_flash_write (14)3.1.24 int zq_flash_read (15)3.1.25 void zq_dbg_uart_init (15)3.1.26 int zq_dbg_uart_read (15)3.1.27 int zq_dbg_uart_write (15)销售网络 (17)1. 二次开发流程1.1 开发流程鼠标点击以上步骤中的图片即可跳转到相应章节。
两个开发板之间的通信串口协议
两个开发板之间的通信串口协议嗨,朋友!今天咱们来聊聊两个开发板之间的通信串口协议,这可真是个超级有趣又非常实用的东西呢!你看啊,开发板就像是两个小小的智能世界,每个开发板都有自己的“想法”和要做的事情。
但是呢,有时候它们需要合作,就像两个人要一起完成一个大项目一样。
这时候,串口协议就像是它们之间的特殊“语言”,让它们能够互相交流、传递信息。
我有个朋友,他叫小李,是个特别痴迷于开发板的家伙。
有一次,他想让两个开发板协同工作,一个开发板负责收集传感器的数据,像温度、湿度之类的,另一个开发板呢,要根据这些数据去控制一些设备,比如说风扇或者灯泡。
可是刚开始的时候,这两个开发板就像两个来自不同星球的生物,根本无法理解对方。
那怎么办呢?这就轮到串口协议闪亮登场啦!串口协议有很多种类型,就像世界上有各种各样的语言一样。
最常见的有UART(通用异步收发传输器)串口协议。
这个协议啊,就像是一种简单又有效的“密码本”。
它规定了数据怎么在开发板之间传输。
比如说,数据是以什么样的格式发送出去的,每个字节的数据应该怎么排列,是先高位还是先低位。
这就好比我们写信一样,要有一定的格式,不然对方收到了也看不懂啊。
我记得小李在设置UART串口协议的时候,那可是费了好大的劲儿。
他得确定波特率,波特率是什么呢?简单来说,就像是说话的速度。
如果两个开发板的波特率设置得不一样,那就好比一个人说得特别快,另一个人说得特别慢,根本没法好好交流。
他一边看着开发板的手册,一边在代码里调整参数,嘴里还不停地嘟囔着:“哎呀,这可真让人头疼!”除了波特率,还有数据位、停止位和奇偶校验位。
数据位就像是我们说话里真正有用的字词,停止位就像是一句话说完后的停顿,奇偶校验位呢,就像是给我们说的话加上一个小检验码,看看有没有传错。
这就好比我们在传小纸条的时候,在纸条的末尾加个小记号,收到的人一看这个记号就知道纸条有没有被改过。
再说说另一个朋友小王吧,他也在搞开发板的项目。
多旋翼无人机二次开发 教程五 串口输出
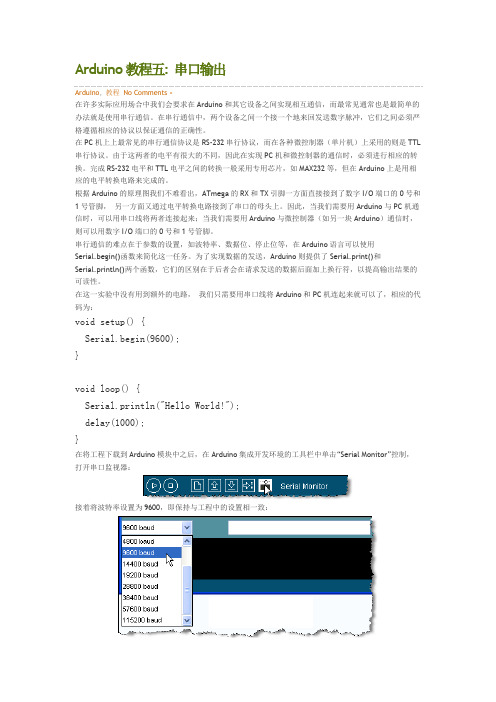
Arduino教程五: 串口输出Arduino, 教程No Comments »在许多实际应用场合中我们会要求在Arduino和其它设备之间实现相互通信,而最常见通常也是最简单的办法就是使用串行通信。
在串行通信中,两个设备之间一个接一个地来回发送数字脉冲,它们之间必须严格遵循相应的协议以保证通信的正确性。
在PC机上上最常见的串行通信协议是RS-232串行协议,而在各种微控制器(单片机)上采用的则是TTL 串行协议。
由于这两者的电平有很大的不同,因此在实现PC机和微控制器的通信时,必须进行相应的转换。
完成RS-232电平和TTL电平之间的转换一般采用专用芯片,如MAX232等,但在Arduino上是用相应的电平转换电路来完成的。
根据Arduino的原理图我们不难看出,ATmega的RX和TX引脚一方面直接接到了数字I/O端口的0号和1号管脚,另一方面又通过电平转换电路接到了串口的母头上。
因此,当我们需要用Arduino与PC机通信时,可以用串口线将两者连接起来;当我们需要用Arduino与微控制器(如另一块Arduino)通信时,则可以用数字I/O端口的0号和1号管脚。
串行通信的难点在于参数的设置,如波特率、数据位、停止位等,在Arduino语言可以使用Serial.begin()函数来简化这一任务。
为了实现数据的发送,Arduino则提供了Serial.print()和Serial.println()两个函数,它们的区别在于后者会在请求发送的数据后面加上换行符,以提高输出结果的可读性。
在这一实验中没有用到额外的电路,我们只需要用串口线将Arduino和PC机连起来就可以了,相应的代码为:void setup() {Serial.begin(9600);}void loop() {Serial.println("Hello World!");delay(1000);}在将工程下载到Arduino模块中之后,在Arduino集成开发环境的工具栏中单击“Serial Monitor”控制,打开串口监视器:接着将波特率设置为9600,即保持与工程中的设置相一致:如果一切正常,此时我们就可以在Arduino集成开发环境的Console窗口中看到串口上输出的数据了:为了检查串口上是否有数据发送,一个比较简单的办法是在数字I/O端口的1号管脚(TX)和5V电源之间接一个发光二极管,如下面的原理图所示:这样一旦Arduino在通过串口向PC机发送数据时,相应的发光二极管就会闪烁,实际应用中这是一个非常方便的调试手段;-)。
GSM MODEM 动态链接库二次开发接口说明

自动化产品系列开发指南适用于GSM MODEM模块GSM MODEM 动态链接库 (DLL) 二次开发指南V2.0.0奥佳电气自动化产品,您成功的选择尊敬的用户:欢迎您使用奥佳电气为您提供的工业自动化产品及使用手册。
经过多年,在产品品质、技术应用、服务支持等方面不断进取和踏实积累,奥佳电气成功推出的 RS485_IO模块、GSM Modem模块、工业数据通信网关RTU、机房环境监控报警主机等,已在自动化行业各领域中得到很好地应用。
经受了各种现场应用环境的考验,得到专家及广大用户的一致认可。
我们将不断地升级使用手册,为您陆续提供现场应用程序和文档。
当您遇到疑难问题时,可以随时与我们联系,我们将在第一时间及时响应,帮助您解决问题。
欲知更多详情,请关注微信官网关于手册:手册主要包含GSM Modem用户二次开发相关内容适用范围:本短信二次开发接口适用于奥佳电气工业GSM Modem,支持标准AT指令的GSM短信终端目录目录 (4)1.概述 (5)2.接口函数 (5)2.1.初始化 (5)2.1.1. 函数原型 (5)2.1.2. 功能描述 (5)2.1.3. 出错代码 (5)2.2.短信发送 (6)2.2.1. 函数原型 (6)2.2.2. 功能描述 (6)2.2.3. 出错代码 (6)2.3.短信接收 (6)2.3.1. 函数原型 (6)2.3.2. 功能描述 (7)2.3.3. 出错代码 (7)2.4.短信删除 (7)2.4.1. 函数原型 (7)2.4.2. 功能描述 (7)2.4.3. 出错代码 (8)2.5.模块关闭 (8)2.5.1. 函数原型 (8)2.5.2. 功能描述 (8)2.6.获取短中心号码 (8)2.6.1. 函数原型 (8)2.6.2. 功能描述 (8)2.7.设置短中心号码 (9)2.7.1. 函数原型 (9)2.7.2. 功能描述 (9)2.8.获取信号强度 (9)2.8.1. 函数原型 (9)2.8.2. 功能描述 (9)2.9.是否启用调试日志输出 (9)2.9.1. 函数原型 (9)2.9.2. 功能描述 (10)3.用户初始化 (10)4.用户编程入门 (11)1.概述GSM Modem是一种使用移动通讯系统的调制解调器。
蓝牙模块二次开发流程

蓝牙模块二次开发流程走进科技的微波炉:探索蓝牙模块的二次开发之旅在当今这个数字化的时代,蓝牙技术如同一匹脱缰的野马,驰骋在无线通信的草原上。
而蓝牙模块的二次开发,就像是给这匹马装上了翅膀,让它的潜力得以无限释放。
这是一场充满挑战与创新的冒险,让我们一起踏上这段旅程,领略其中的奥秘与魅力。
首先,我们要明白,“二次开发”并不是简单的“复制粘贴”,而是对已有的蓝牙模块进行深度定制,以满足特定的应用需求。
这就像是在一块空白的画布上,用代码作画,每一行都蕴含着开发者的心血和智慧。
第一步,自然是“知己知彼”。
我们需要对蓝牙模块的基本功能、工作原理、接口特性等有深入的理解。
这就像是学习一门新语言,你需要先掌握语法,才能流畅地表达思想。
这里,我们可能会遇到一些“拦路虎”,比如复杂的协议栈,但只要我们有“破釜沉舟”的决心,这些问题都将迎刃而解。
接下来,是“设计阶段”。
这一步就像建筑设计师在图纸上勾勒蓝图,我们需要根据应用需求,规划模块的功能布局,确定软件架构。
这个过程可能需要反复推敲,甚至“夜以继日”,但每一步都离成功更近一步。
然后,就是“编码实现”。
这是一场考验耐心和细心的马拉松,每一个0和1都要精准无误。
在这个过程中,我们可能会遇到“瓶颈”,甚至“山穷水尽”,但只要我们坚持不懈,总会找到“柳暗花明”的那一刻。
再然后,就是“测试优化”。
这就像质检员检查产品的每一个细节,我们要对模块进行全方位的测试,确保其稳定性和性能。
这个阶段可能会有些枯燥,但每一次成功的调试,都会带来满满的成就感。
最后,是“应用落地”。
看到自己的成果在实际产品中发挥作用,那种喜悦无法言表。
这就像看着自己的孩子长大成人,那份骄傲和满足感,只有经历过的人才能体会。
总的来说,蓝牙模块的二次开发是一个既艰辛又充满乐趣的过程,它需要我们具备扎实的技术基础,创新的思维,以及坚韧不拔的精神。
在这个过程中,我们不仅提升了自己的技能,也体验到了科技带来的乐趣和满足感。
二次开发串口通信协议
二次开发串口通信协议在现代科技的快速发展下,串口通信成为了很多设备之间数据传输的重要方式。
然而,原始的串口通信协议并不总是满足用户的需求,因此需要进行二次开发,以便实现更高效、可靠和安全的通信。
本文将介绍二次开发串口通信协议的概念、目的、步骤以及一些应用领域。
一、概念与目的二次开发串口通信协议指的是对原始串口通信协议进行修改、优化或扩展,以满足用户特定的需求。
其目的是提升串口通信的性能和功能,以便更好地应用于各种场景。
通过二次开发,可以实现以下几个方面的改进:1. 增强通信速度:通过优化数据传输方式和协议格式,提高数据传输速率,减少延迟,降低通信时延。
2. 加强数据可靠性:通过增加校验机制、纠错码等手段,提高数据传输的可靠性,减少数据丢失和错误。
3. 支持更多设备类型:通过协议扩展和适配,兼容更多不同类型的设备,并实现不同设备之间的互操作。
4. 提供安全保障:通过加密算法、授权认证等手段,保护数据传输过程的安全性,防止数据被非法篡改、窃取或伪造。
5. 增加功能扩展:根据用户需求,可以为协议添加额外的功能,如数据压缩、多路复用、多节点通信等。
二、二次开发步骤二次开发串口通信协议的过程可以分为以下几个关键步骤:1. 确定需求:针对具体应用场景和需求,明确二次开发的目标以及需要改进的功能。
例如,是提升通信速度还是加强数据可靠性。
2. 原始协议分析:对现有的串口通信协议进行全面的分析和了解,包括协议格式、通信规则、校验机制等。
这有助于找出协议存在的问题和改进的空间。
3. 设计优化方案:根据需求和分析结果,设计相应的优化方案。
可以是通过修改原始协议格式,增加校验机制,或者引入新的通信策略等。
4. 编程实现:利用编程语言,针对所选择的优化方案进行代码实现。
这可能涉及到串口通信库的调用、数据处理、协议解析等。
5. 功能测试与调试:对二次开发后的协议进行全面的功能测试和调试,确保通信的稳定性、可靠性和性能。
同时,根据测试结果进行必要的优化和调整。
如何快速进行功率计的二次开发

如何快速进行功率计的二次开发?摘要:功率计是电压、电流和功率测量中最常用的仪器。
如果我们能根据需求合理的进行二次开发,简单的功率计也能带来惊喜的测试效果。
功率计的接口致远电子除了有高端的PA系列功率分析仪以外,还有相对简单的PA300系列功率计产品。
功率计可实现测量电压、电流、频率、功率、功率因数、效率(三相功率计)、谐波、积分等功能。
其大部分的应用场合是在研发、测试、生产上。
特别是一些具备自动化测试的系统或产线上,往往需要对功率计的数据进行集成显示,这就需要对功率计进行二次开发。
功率计做二次开发首先要确认的就是通讯的接口,致远电子PA300系列功率计提供USB、GPIB、以太网以及串口接口,4种接口免费标配,都可以用于二次开发。
二次开发指令标准PA300系列功率计支持SCPI命令集和Modbus协议实现二次开发。
SCPI是Standard Commands for Programmable Instruments的缩写,即可编程仪器标准命令集;是一种基于ASCII码的标准仪器编程语言,供测试和测量仪器使用。
SCPI命令一般由英文字母组成,并且不区分字母的大小写;但为了便于书写,用户在书写时可以省略SCPI 命令中的部分字母。
具体而言,书写时,命令集里完整命令的大写字母不可省略,而小写字母则可省略。
当客户使用SCPI指令集进行二次开发时,可以选择USB、GPIB、以太网、串口当中的任一接口。
Modbus是一种串行通信协议,是当前工业领域通信协议的一种通用的业界标准,Modbus允许多个(大约240个) 设备连接在同一个网络上进行通信,在数据采集与控制系统中,Modbus通常用来连接主机和终端控制系统,Modbus有固定的格式,并通过ID编号进行指定数据的读写。
PA300系列功率计也支持Modbus协议,当选用Modbus协议时,可以选用串口或以太网进行通信。
下图是当用串口和以太网进行Modbus通信时的数据格式。
多旋翼无人机二次开发(现代职业)2_E360开发7Demo程序讲解
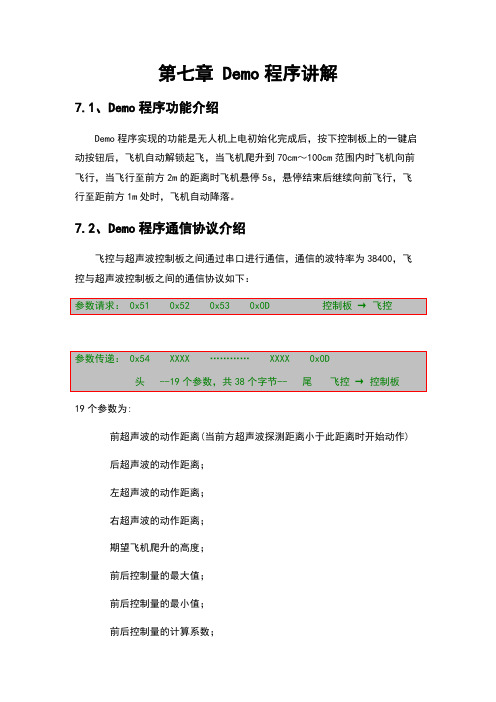
第七章 Demo程序讲解7.1、Demo程序功能介绍Demo程序实现的功能是无人机上电初始化完成后,按下控制板上的一键启动按钮后,飞机自动解锁起飞,当飞机爬升到70cm~100cm范围内时飞机向前飞行,当飞行至前方2m的距离时飞机悬停5s,悬停结束后继续向前飞行,飞行至距前方1m处时,飞机自动降落。
7.2、Demo程序通信协议介绍飞控与超声波控制板之间通过串口进行通信,通信的波特率为38400,飞控与超声波控制板之间的通信协议如下:19个参数为:前超声波的动作距离(当前方超声波探测距离小于此距离时开始动作)后超声波的动作距离;左超声波的动作距离;右超声波的动作距离;期望飞机爬升的高度;前后控制量的最大值;前后控制量的最小值;前后控制量的计算系数;左右控制量的最大值;左右控制量的最小值;左右控制量的计算系数;高度控制量的最大值;高度控制量的最小值;高度控制量的计算系数;飞机悬停时间(单位:秒);悬停时据前方的距离;降落时据前方的距离;飞向悬停距离的控制量;飞向降落距离的控制量。
7.3、Demo程序分析7.3.1、工作流程飞控上电后进行控制通道和参数的初始化,然后每20毫秒执行一次ReadExtData_loop()函数,当Send_End_Flage为1时,飞控向控制板请求数据,当收到控制板的参数请求消息时,将Send_End_Flage置为0,即不再执行ReadExtData_loop()函数,参数发送函数SendData2Board_loop()每1秒执行一次,当Send_End_Flag为0时,发送参数数据,当收到控制板的确认消息时,将Send_End_Flage置为1,参数发送完毕,执行ReadExtData_loop()函数控制飞机飞行。
7.3.2、参数设置Demo程序的19个参数可以通过修改static void init_parameter()函数中各个参数的值来进行设置。
ardupilot/ArduCopter/ArduCopter.pde1static void init_parameter()2{3//期望距离:前后左右取值范围[100,300]4//高取值范围[50,-130]5//单位:cm6Expectation_cm[SONAR_F]=200;//前超声波的动作距离7Expectation_cm[SONAR_B]=200;//后超声波的动作距离8Expectation_cm[SONAR_L]=100;//左超声波的动作距离9Expectation_cm[SONAR_R]=100;//右超声波的动作距离10Expectation_cm[SONAR_Alt]=70;//期望飞机爬升的高度1112Control[CONTROL_FB].Control_limit_max =450;//前后控制量的最大值,13//取值范围[0,550] 14Control[CONTROL_FB].Control_limit_min =-450;//前后控制量的最大值,15//取值范围[-550,0] 16Control[CONTROL_FB].Control_ratio =5;//前后控制量的计算系数,17//取值范围[1,15]1819Control[CONTROL_LR].Control_limit_max =450;//左右控制量的最大值,20//取值范围[0,550] 21Control[CONTROL_LR].Control_limit_min =-450;//左右控制量的最小值,22//取值范围[-550,0] 23Control[CONTROL_LR].Control_ratio =5;//左右控制量的计算系数,24//取值范围[1,15]2526Control[CONTROL_UD].Control_limit_max =150;//高度控制量的最大值,27//取值范围[0,160]28Control[CONTROL_UD].Control_limit_min =-130;//高度控制量的最小值,29//取值范围[-160,0]30Control[CONTROL_UD].Control_ratio =6;//高度控制量的计算系数,31//取值范围[1,15]3233FlyparameterItem.Hold_time =5;//飞机悬停时间(单位:秒),34//取值范围[1,20]35FlyparameterItem.Hold_distance =220;//悬停时据前方的距离,36//取值范围[151,300]37nd_distance =120;//降落时据前方的距离,38//取值范围[100,150]39FlyparameterItem.To_hold_control_value =-110;//飞向悬停距离的控制量,40//取值范围[-200,-50] 41FlyparameterItem.To_land_control_value =-110;//飞向降落距离的控制量,//取42值范围[-200,-50]43}控制量和控制系数的值越大,飞机反应越灵敏,但操控起来就越困难。
二次开发接口
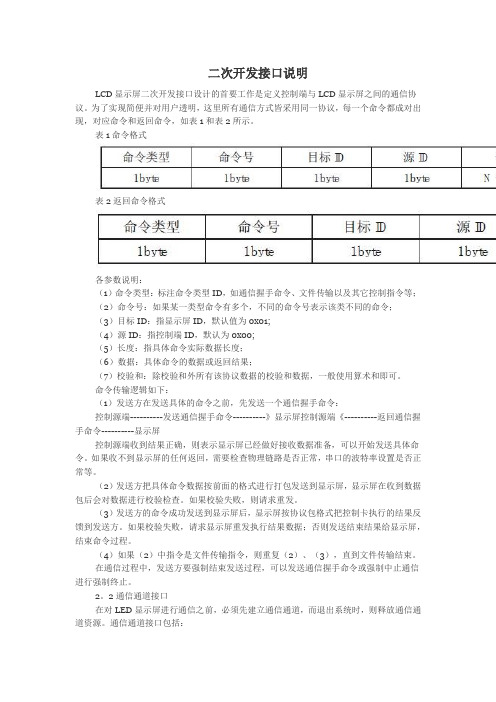
二次开发接口说明LCD显示屏二次开发接口设计的首要工作是定义控制端与LCD显示屏之间的通信协议。
为了实现简便并对用户透明,这里所有通信方式皆采用同一协议,每一个命令都成对出现,对应命令和返回命令,如表1和表2所示。
表1命令格式表2返回命令格式各参数说明:(1)命令类型:标注命令类型ID,如通信握手命令、文件传输以及其它控制指令等;(2)命令号:如果某一类型命令有多个,不同的命令号表示该类不同的命令;(3)目标ID:指显示屏ID,默认值为0x01;(4)源ID:指控制端ID,默认为0x00;(5)长度:指具体命令实际数据长度;(6)数据:具体命令的数据或返回结果;(7)校验和:除校验和外所有该协议数据的校验和数据,一般使用算术和即可。
命令传输逻辑如下:(1)发送方在发送具体的命令之前,先发送一个通信握手命令:控制源端----------发送通信握手命令----------》显示屏控制源端《----------返回通信握手命令----------显示屏控制源端收到结果正确,则表示显示屏已经做好接收数据准备,可以开始发送具体命令。
如果收不到显示屏的任何返回,需要检查物理链路是否正常,串口的波特率设置是否正常等。
(2)发送方把具体命令数据按前面的格式进行打包发送到显示屏,显示屏在收到数据包后会对数据进行校验检查。
如果校验失败,则请求重发。
(3)发送方的命令成功发送到显示屏后,显示屏按协议包格式把控制卡执行的结果反馈到发送方。
如果校验失败,请求显示屏重发执行结果数据;否则发送结束结果给显示屏,结束命令过程。
(4)如果(2)中指令是文件传输指令,则重复(2)、(3),直到文件传输结束。
在通信过程中,发送方要强制结束发送过程,可以发送通信握手命令或强制中止通信进行强制终止。
2。
2通信通道接口在对LED显示屏进行通信之前,必须先建立通信通道,而退出系统时,则释放通信通道资源。
通信通道接口包括:(1)打开通信通道函数格式:DWORDCOMM_Open(constPDeviceParampDevParam,DWORDdwNotify,DWORDdwWindws,DWORDdwMsg);参数说明:①pDevParam:表示指定设备的参数,例如串口的波特率、串口号,以及网络本地IP 地址、端口号等参数;②dwNotify:表示当LED显示屏有返回值时是否通知,0代表不通知,1表示通知;③dwWindws:表示消息通知的窗体句柄;④dwMsg:用户定义的消息号。
CAD软件二次开发

ObjectARX程序框架
• 入口回调函数 extern "C" AcRx::AppRetCode acrxEntryPoint(AcRx::AppMsgCode msg, void* pkt) { //初始化,命令与函数体映射 … }
2. ObjectARX内库
五大类: • 1. AcRx类 • 2. AcEd类 • 3. AcDb类 • 4. AcGi类 • 5. AcGe类
菜单添加-2
• //命令余函数对应表 static UF_MB_action_t actionTable[] = { //AVIDM { "LogInAVIDM", (UF_MB_callback_t)LogInAVIDM, NULL }, { "CheckInFromAVIDM", (UF_MB_callback_t)CheckInFromAVIDM, NULL }, { "CheckToAVIDM", (UF_MB_callback_t)CheckToAVIDM, NULL }, { "LogOutAVIDM", (UF_MB_callback_t)LogOutAVIDM, NULL }, { NULL, NULL, NULL} };
• 举例: typedef unsigned int tag_t, *tag_p_t;
用户界面接口
•
• • • •
信息窗口: UF_UI_Open_Listing_Window(),…,write,save,cl ose,… 对象选择:UF_UI_select_with_class_dialog()按 类选择;UF_UI_select_with_single_dialog()选 择单个实体对话框 文件选择:UF_UI_create_part(), UF_UI_open_part(); 获得输入:uc1600()获得字符串,uc1608实数/整 形输入, uc1607()获得整数输入,uc1609()实数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
byte2
byte3
数据字节 2 byte4
校验码 byte5
校验码生成规则 byte5 = byte2 异或 byte3 异或 byte4
下行命令:(由控制端发起,到主机端命令)
1、基本控制命令
命令码(A3) 数据 1
地址码(0-7)
普通键盘命令码
数据 2
调整参数
数据字节 1
数据字节 2
校验码
普通键盘命令码:
Backaudio 二次开发通讯协议
通讯协议
物理层 主机提供 RS232 和 RS485 接口,没有带隔离,使用时注意隔离,绝对不能带强电否则会烧 坏主机。 8bits 数据位,1bit 起始位,1bit 停止位,无奇偶校验。
波特率 4800bps
数据格式 命令码
byte1
地址码(0-7) 数据字节 1
数据 2
无定义
返回码
命令码(AD) 数据 1
地址码(0-7)
数据字节 1
00
成功
FF
失败
数据 2
无定义
数据字节 2 数据字节 2
校验码 校验码
Backaudio 技术支持中心编译
2005 年 9 月 9 日
第3页共3页
01
VOL+(音量增加)
02
PLAY\PUASE(播放)
03
OFF(播放)
04
FM\MP3(状态)
05
UP(上一曲)
06
DVD (状态)
07
ON(开机)
08
VOL-(音量减小)
09 DOWN(下一曲)
调整参数: 音量数据:00-31 PLAY:00,PAUSE:01 任意 FM:01 , MP3:02 DVD\FM\ MP3(状态)00\01\02 DVD :00 DVD\FM\ MP3(状态)00\01\02 音量数据:00-31 DVD\FM\MP3(状态)00\01\02
返回码
命令码(A3) 数据 1
地址码(0-7) 数据字节 1
数据字节 2
音量。如果操作失败,返回 FF,数据 2 没有意义。
第1页共3页
校验码
数据 2 7-4bit协议
EQ 代号
0000 ( 0X H ) 0001 ( 1X H ) 0010 ( 2XH ) 0011 ( 3X H) 0100 ( 4X H ) 0101 ( 5X H )
0000 ( 0X H ) 0001 ( 1X H ) 0010 ( 2XH ) 0011 ( 3X H) 0100 ( 4X H ) 0101 ( 5X H )
Normal Pop Soft Classic Jazz Metal
数据字节 2
校验码
返回码
命令码(A4) 地址码(0-7) 数据字节 1
数据字节 2
数据 1
音量。如果操作失败,返回 FF,数据 2 没有意义。
数据 2
7-4bit:EQ 值
EQ 代号
0000 ( 0X H ) Normal
0001 ( 1X H ) Pop
0010 ( 2XH ) Soft
0011 ( 3X H) Classic
0100 ( 4X H ) Jazz
校验码
第2页共3页
Backaudio 二次开发通讯协议
0101 ( 5X H ) Metal
3-0bit:音源状态值 X110 ( DVD ) , X101 ( FM ) , X011 (MP3 )
3、子目录选择
命令码(AD) 地址码(0-7) 数据字节 1 数据 1
01 上一个子目录, 02 下一个子目录
Normal Pop Soft Classic Jazz Metal
3-0bit:音源状态值 X110 ( DVD ) , X101 ( FM ) , X011 (MP3 )
2、音乐播放模式 1、2、3、4、5、6(仅对部分主机有效)
命令码(A4) 数据 1
取值为 00 数据 2
EQ 代号
地址码(0-7) 数据字节 1