基于数据采集卡PCI-1711L的振动测试系统的设计
基于研华PCI-1713U和LabVIEW的测控系统设计
1 试 验 系 统 介 绍
某 型 号 输 送 系 统 主 要 包 含 推 进 剂 出 流 控 制 系 统 、地
l 面增 压系 统 、燃 油 输送 系统 、地 面抽 空 系统 、推 进 剂加
摘
要 :论 文介 绍 了一 种 基 于 图 形 化 虚 拟 仪 器 编 程 软 件 L a b V I E W 的 测 控 系统 设 计 方案 .该 方 案 以研 华 公 司 的 数据 采 集卡 P CI 一 1 7 1 3 U和 P C I -1 7 1 0 U 为 硬 件 平 台 .建 立 了输 送 系统 流 阻 特 性 试 验 测 控 系统 , 实 验
结果表 明, 该 系统能够有 效地 实现试 验的控制 要求 ,完成对信号 的数据 采集和 实时图形显示 。
关 键 词 :P CI 一 1 7 1 3 U ;测 控 系统 ;L a b V I E W ;流 阻 特 性 中 图 分 类 号 :T P 2 7 4 文 献 标 识 码 :A d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 2 — 6 6 7 3 . 2 0 1 3 . 0 1 . 0 5 1
( Be i j i  ̄ g I n s i t t u t e o f Ae r o s p a c e Te s t i n g Te c h n o l o g y , Be i j i n g 1 0 0 0 7 4 , Ch i n a )
Abs t r ac t :I n t h i s pa p e r ,a d e s i g n pr o p o s a l f or me a s ur e me nt a nd c o n t r ol s y s t e m b a s e d o n v i r t ua l i n s t r u me n t p r og r a m mi n g s o f t wa r e La b VI EW .
基于PCI总线数据采集卡的实时测控技术

基于PCI总线数据采集卡的实时测控技术孙业1△,张鹏2,张哲1,梁敏3(1.山东福瑞达医疗器械有限公司,济南250101;2.中国科学院软件研究所计算机科学国家重点实验室,北京100190;3.山东省立医院,济南250021)摘要:我们从软件技术的角度,论述了在Windows XP环境下基于PCI总线数据采集卡实现实时测控所需要的关键技术、软件体系结构和开发方法。
遵循本文所讨论的技术路线,开发了DFQ系列多方位牵引床的测控软件,提高了被控系统的控制精度和可靠性,增强了系统的可用性。
关键词:PCI总线;W DM设备驱动程序;软件体系结构;计算机测量与控制中图分类号:TP216;TP311;R318 文献标识码:A 文章编号:167226278(2009)0120056204The Study of R eal-time Measurement and ControlT echnique based on PCI Bus Data Acquisition C ardSUN Ye1,ZHANG Peng2,ZHANG Zhe1,LIANG Min3(1.Shandong Freda Medical Device Co,Ltd,Jinan250101,China;2.Institute o f So ftware Chinese Academy o f Sciences,The state K ey Laboratory o f Computer Science,Beijing100190,China;3.Shandong Provincal Hospital,Jinan250021)Abstract:The key techniques,s oftware architecture and development method used to im plement real-time measurement and control based on PCI bus data acquisition card in Windows XP environment are discussed from the view point of s oftware technology.The measurement and control s oftware for DFQ multidimensional traction bed are developed according to the techniques provided in this paper,the precision,high reliability and better usability of the object system are im proved.K ey w ords:PCI Bus;W DM device driver;S oftware architecture;C om puter measurement and control1 引 言计算机测控技术在生产实践中有着广泛的应用。
基于PCI-1714的高速数据采集系统方案设计
摘要:介绍了一种基于PCI一1714的高速数据采集系统设计
方案。系统以PCI一1714高速数据采集卡为硬件平台,借助
研华32位DLL驱动程序接口.采用VC++高级语言编程对
PCI一1714进行硬件驱动和控制.实现了数据高速采集、传输
和存储。该系统可广泛应用于多种高速数据采集领域。具有
widely used in many applications and it has good commonality
as well as extensibility.
KeyWords:PCI-1714;埘gh Speed Data Acquisition;Advan-
tech DLL Driver;VC++
PCI~1714是Advantech(研华)公司最新推出的高 速数据采集卡,它采用12位高速ADC,板载32K FI— FO作为高速缓存,能够达到30MS/s的采样速率。以 PCI一1714为硬件平台,通过32位33MHz的PCI总线 与工控机相连,采用工控机的5 12M DDR333内存作 为采样数据的海量缓冲存储器,借助研华32位DLL 驱动程序提供的接口,采用VC++6.0高级语言编程实 现对PCI一1714的硬件控制,完成数据高速采集、传输 及存储,构建基于PCI一1714的高速数据采集系统。与 其它高速数据采集系统设计方法相比,本系统具有开
//采样末通
SendDlghemMessage(hDlg,IDC~ESTOP,EM—RE—
PLACESEL,0,(LPARAM)((LPSTR)szBuffer)); itoa((int)gwDelayCnt,szBuffer,10);//延迟数初始
基于LabVIEW和PCI_1711的高速数据采集系统

文章编号:1006-1576(2007)02-0060-02基于LabVIEW和PCI-1711的高速数据采集系统高龙,傅攀(西南交通大学机械工程学院,四川成都 610031)摘要:基于LabVIEW和PCI-1711的高速数据采集系统,采用中断触发方式进行数据采集,通过12位高速A/D 转换。
PCI-1711使用1个PCI控制器作为采集卡与PCI总线的接口。
内部缓冲区的使用多采用循环方式,将数据存储到文本文档中。
用该系统采集轴承振动信号,结果表明,能有效地完成信号高速数据采集和实时图形显示。
关键词:高速数据采集系统;LabVIEW;PCI-1711;中断触发中图分类号:TP274.2 文献标识码:AHigh Speed Data Acquisition System Based on LabVIEW and PCI-1711GAO Long, FU Pan(School of Mechanical Engineering, Southwest Jiaotong University, Chengdu 610031, China) Abstract: One kind of high speed data acquisition system based on LabVIEW and the PCI-1711 uses interrupt triggering to acquire data and transforming through 12 bit high speed A/D. PCI-1711 uses one PCI controller as the interface between acquisition card and PCI bus. The internal buffer area usually adopts cycle to store data in text document. The system is used to adopt the vibration signal of bearing. The result showed that the system will accomplish high speed data acquisition and real-time graph display effectively.Keywords: High speed data acquisition system; LabVIEW; PCI-1711; Interrupt triggering0 引言应用文本式编程语言的数据采集系统,要求开发人员具有良好编程基础及一定硬件知识,对采集数据的分析处理可借助其他工具实现。
基于LabVIEW和PCI_1710的虚拟仪器系统

2011年第10期仪表技术与传感器InstrumentTechniqueandSensor 2011No.10基金项目:河北省教育厅资助科研项目;河北省高等学校自然科学研究青年基金项目(2010231);河北机电职业技术学院院立教科研规划项目(022010013)收稿日期:2010-12-20收修改稿日期:2011-06-20基于LabVIEW 和PCI-1710的虚拟仪器系统郭山国,任立军,王国章,魏志强,张林(河北机电职业技术学院现代制造工程系,河北邢台054048)摘要:介绍了虚拟仪器的概念、特点及其系统组成,并在图形化编程语言LabVIEW 环境下,用多功能数据采集卡PCI-1710开发虚拟仪器系统的方法等。
开发出的虚拟仪器系统不但界面友好、操作简便,而且功能强大,实现了信号采集、信号发生以及各种信号分析处理等功能。
经过实验测试表明,该虚拟仪器系统的各种功能已经实现且结果正确可靠。
关键词:LabVIEW ;数据采集;PCI-1710;虚拟仪器中图分类号:TP274文献标识码:A文章编号:1002-1841(2011)10-0035-03Virtual Instrument System Based on LabVIEW and PCI-1710GUO Shan-guo ,REN Li-jun ,WANG Guo-zhang ,WEI Zhi-qiang ,ZHANG lin (Hebei Institute of Mechanical and Electronic Technology ,Xingtai 054048,China )Abstract :This paper introduced the concept ,characteristic and system of virtual instrument.The developed method of virtual instrument based on the multifunctional data acquisition card PCI-1710made in non-NI by using programming language LabVIEW was presented.This virtual instrument has a friendly interface ,easy operation ,and powerful function ,it can achieve signal acquisi-tion ,signal generation and kinds of signal analysis ,etc.The results of experiments indicate that the functions of the virtual instru-ment is achieved and results of the virtual instrument is right and reliable.Key words :LabVIEW ;data acquisition ;PCI-1710;VI 1虚拟仪器的概念、特点及其系统组成[1-2]虚拟仪器就是加在计算机上的一些软件和/或硬件,它们具有和实际独立仪器类似的外观和性能,使用者操作这台计算机,就像是在操纵一台自己专门设计的传统电子仪器。
PCI-1711 1711L 快速说明书

PCI-1711/1711L快速安装使用手册PCI-1711/1711L快速安装使用手册 (1)第一章 产品介绍 (2)1.1 概述 (2)1.1.1 即插即用功能 (2)1.1.2 灵活的输入类型和范围设定 (2)1.1.3 卡上FIFO(先入先出)存储器 (2)1.1.4 卡上可编程计数器 (2)1.1.5 16路数字输入和16路数字输出 (3)1.2 特点 (3)第二章 安装与测试 (3)2.1 初始检查 (3)2.2 Windows2K/XP/9X下板卡的安装 (3)2.2.1 软件的安装:...........................................................................2.2.2 硬件的安装: (8)2.3 测试 (10)2.3.1 模拟输入功能测试 (10)2.3.2 模拟输出功能测试 (11)2.3.3 数字量输入功能测试 (12)2.3.4 数字量输出功能测试 (13)2.4.5 计数器功能测试 (14)第三章 信号连接 (15)3.1 模拟信号输入连接 (16)3.2模拟信号输出连接 (17)3.3触发源连接 (18)3.3.1 内部触发源连接 (18)3.3.2 外部触发源连接 (18)第四章 例程使用详解 (18)4.1 板卡支持列表4.2 常用例子使用说明 (19)4.21 ADSOFT/ADTRIG(软件触发方式例程) (19)4.2.2 ADint(中断方式进行数据采集的例程) (19)4.2.3 DIGOUT(数字量输出): (21)4.2.4 COUNTER(计数程序) (23)4.2.5 Digin (数字量输入例程) (24)4.2.6 PULSE(脉冲输出例程) (24)4.2.7 MADint(多通道中断采集例程) (25)第五章 遇到问题,如何解决?.......................................第一章产品介绍1.1 概述PCI-1711/1711L是一款功能强大的低成本多功能PCI总线数据采集卡。
研华高速采集卡PCI-1714在发动机声音与振动监测的应用
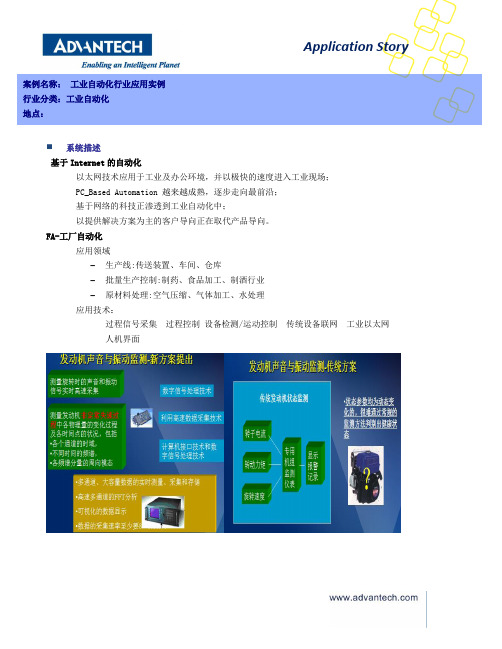
系统描述基于Internet 的自动化以太网技术应用于工业及办公环境,并以极快的速度进入工业现场; PC_Based Automation 越来越成熟,逐步走向最前沿; 基于网络的科技正渗透到工业自动化中;以提供解决方案为主的客户导向正在取代产品导向。
FA-工厂自动化应用领域– 生产线:传送装置、车间、仓库– 批量生产控制:制药、食品加工、制酒行业 – 原材料处理:空气压缩、气体加工、水处理 应用技术:过程信号采集 过程控制 设备检测/运动控制 传统设备联网 工业以太网 人机界面案例名称: 工业自动化行业应用实例 行业分类:工业自动化 地点:ADAM-5510在国家级地表水检测中的应用国家现在正有计划的在各个水系,支流开始设立监测站,进行水质与水文监测,并希望最终能够在全国范围内形成监控网,具体的系统规划如下:(以长江流域为例)1.建立地区级水资源监测站,收集自然水的多种物理量信息,包括PH值,DO(溶氧),浊度,水温,电导,COD(化学耗氧量),TOC(总有机碳),氨氮等。
2.在本地纪录各种量的历史值,并在需要时上传到中心站3.水质监测信息通过电话网从监测站传输到地区环保监测中心,还可以通过卫星将数据传输到国家环保总局,进行统一的分析和处理。
工业级联网通讯工业以太网安全性要求1.数据加密(Data Encryption)、IP访问控制2.主机/设备冗余切换3.信号隔离/浪涌保护/故障处理自动重连4.设备自诊断/故障报警控制5.宽电压(10-30V)/冗余电源6.坚固安装:DIN导轨安装、面板安装、堆叠安装7.宽温度范围:-10~70 C项目实施水质自动监测站系统解决方案及系统配置1. ADAM-5017: 通过各种专用传感器,采集水质中的5项参数,包括PH值,DO(溶氧),浊度,水温,电导2. ADAM-5060: 在采样水质的过程中,控制各类阀门和水泵的工作状态和启停,保证整个采集过程的顺利进行3. ADAM-5090: 一方面通过RS-232与带有串口的智能仪表相连,获取被测参数值,另一方面与Modem 相连,将计算整理好的数据传输通过电话专线传输到地区环保监测中心4. ADAM-5510: 通过执行其内部用C语言编写的程序,自动的控制各个ADAM模块工作,从而就控制了整个监测的全过程。
研华数据采集卡PCI-1710快速入门手册

PCI-1710快速安装使用手册PCI-1710快速安装使用手册 (1)第一章产品介绍 (2)1.1 概述 (2)1.1.1 即插即用功能 (2)1.1.2 单端或差分混合的模拟量输入 (2)1.1.3 卡上FIFO(先入先出)存储器 (2)1.1.4 卡上可编程计数器 (2)1.1.5 用于降低噪声的特殊屏蔽电缆 (2)1.1.6 16路数字输入和16路数字输出 (3)1.1.7 短路保护 (3)1.2 特点: (3)1.3 一般特性: (3)第二章安装与测试 (3)2.1 初始检查 (3)2.2 Windows2K/XP/9X下板卡的安装 (4)2.2.1 软件的安装: (6)2.2.2 硬件的安装: (7)2.3 测试 (8)2.3.1 模拟输入功能测试 (8)2.3.2 模拟输出功能测试 (9)2.3.3 数字量输入功能测试 (10)2.3.4 数字量输出功能测试 (11)2.4.5 计数器功能测试 (12)第三章信号连接 (13)3.1 模拟信号输入连接: (15)3.1.1 单端模拟输入连接 (15)3.1.2 差分式模拟输入连接 (15)3.2模拟信号输出连接 (17)3.3触发源连接 (17)3.3.1 内部定时器触发连接 (17)3.3.2 外部触发源连接 (18)第四章例程使用详解 (18)4.1 板卡支持例程列表4.2 常用例子使用说明 (18)4.2.1 ADSOFT/ADTRIG(软件触发方式例程) (18)4.2.2 ADint(中断方式进行数据采集的例程) (19)4.2.3 DIGOUT(数字量输出): (21)4.2.4 COUNTER(计数程序) (23)4.2.5 Digin (数字量输入例程) (24)4.2.6 PULSE(脉冲输出例程) (24)4.2.7 MADint(多通道中断采集例程) (25)第五章遇到问题,如何解决?.................. 错误!未定义书签。
基于 PCI 总线的高速数据采集卡系统设计与实现
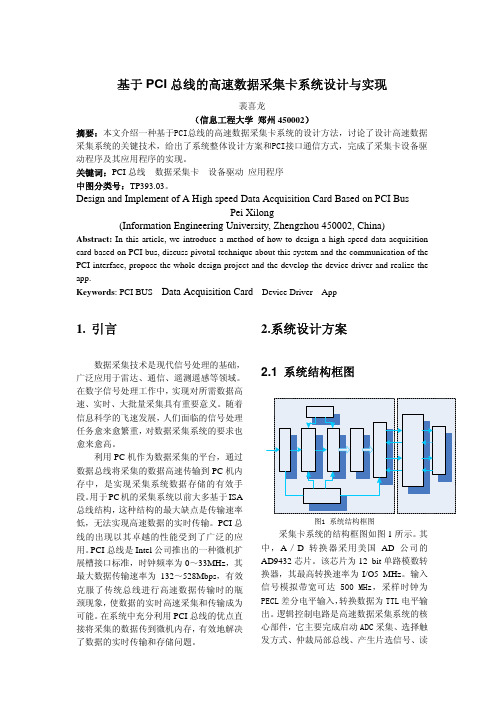
基于PCI总线的高速数据采集卡系统设计与实现裴喜龙(信息工程大学郑州450002)摘要:本文介绍一种基于PCI总线的高速数据采集卡系统的设计方法,讨论了设计高速数据采集系统的关键技术,给出了系统整体设计方案和PCI接口通信方式,完成了采集卡设备驱动程序及其应用程序的实现。
关键词:PCI总线数据采集卡设备驱动应用程序中图分类号:TP393.03。
Design and Implement of A High speed Data Acquisition Card Based on PCI BusPei Xilong(Information Engineering University, Zhengzhou 450002, China) Abstract: In this article, we introduce a method of how to design a high speed data acquisition card based on PCI bus, discuss pivotal technique about this system and the communication of the PCI interface, propose the whole design project and the develop the device driver and realize the app.Keywords: PCI BUS Data Acquisition Card Device Driver App1.引言数据采集技术是现代信号处理的基础,广泛应用于雷达、通信、遥测遥感等领域。
在数字信号处理工作中,实现对所需数据高速、实时、大批量采集具有重要意义。
随着信息科学的飞速发展,人们面临的信号处理任务愈来愈繁重,对数据采集系统的要求也愈来愈高。
利用PC机作为数据采集的平台,通过数据总线将采集的数据高速传输到PC机内存中,是实现采集系统数据存储的有效手段。
基于研华PCI-1711采集卡的振动信号采集系统

压 电加 速 度 传 感 器 通 过 自带 信 号 输 入线 与信 号调 理 器 前 面 板 输 入 连 接 ,信 号 调 理器 自带 3根 带 Q9插 头 的 输 出线 , 出线 一 端 接 信 号 调 理 器 后 面 板 速 度 、 速 度 及 输 加
位 移输出 , 由于 P I 11 C 一 7 1仅支持单端模 拟量输入 , 不支
() 轴 最 小 值 = 。 2X 0
( X 轴 最 大 值 = f /2 。 3) s
T i r: 触 发 方 式 设 置 为 Itra 内 部 触 发 时 即 使 用 r Sc g nenl
用 多 通 道 中断 模 拟 量 采 集 方 式 编 程 ,由 于 数 据 的 存 储 速
度 小 于 数 据 采 集速 度 ,这 样 产 生 了冲 突 ,为 解 决这 一 问 题 , 用 Lb IW 中 的 队列 技 术 将 高 速 采 集 的数 据 由采 利 aV E 集程 序 内部传 递至存储 及显示程序 模块 中 , 运行原 理如 图 6 。
示并将数据 完整保存 ,数据处理程序实现对采集信号 的 频域 、 时域 分析 。使 用 图形 化虚 拟 仪器 编 程 工 具 Lb a
VI W 86进 行 编 程 , a VI W 是 一 种 业 界领 先 的 工 业 标 E . Lb E 准 图 形 化编 程 工 具 ,主 要 用 于 开 发 测 试 、测 量 与 控 制 系
图 4 号源 联 接 示 意 图 信
系统设 计
测
系统 的软件 构 如 图
5 程 序 主 要 .
包括数据采
集 程序 、 显 示 存 储 程 序
以及 处 理 程
图 5软 件 系 统构 成
基于图像处理的三棍定心检测装置的设计
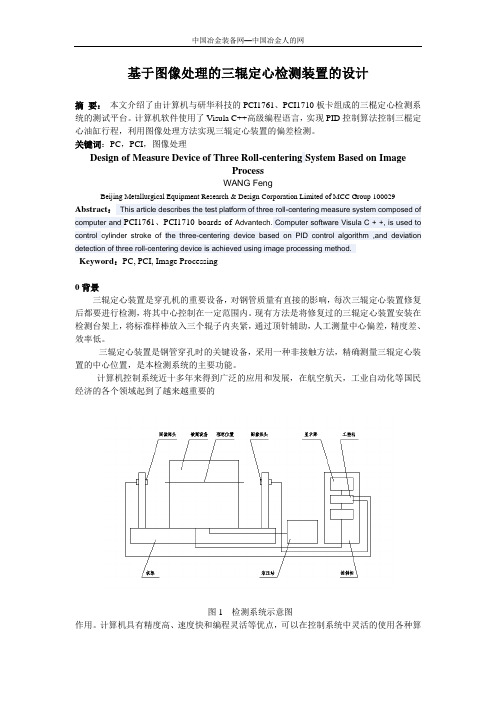
基于图像处理的三辊定心检测装置的设计摘要:本文介绍了由计算机与研华科技的PCI1761、PCI1710板卡组成的三棍定心检测系统的测试平台。
计算机软件使用了Visula C++高级编程语言,实现PID控制算法控制三棍定心油缸行程,利用图像处理方法实现三辊定心装置的偏差检测。
关键词:PC,PCI,图像处理Design of Measure Device of Three Roll-centering System Based on ImageProcessWANG FengBeijing Metallurgical Equipment Research & Design Corporation Limited of MCC Group 100029 Abstract:This article describes the test platform of three roll-centering measure system composed of computer and PCI1761、PCI1710 boards of Advantech. Computer software Visula C + +, is used to control cylinder stroke of the three-centering device based on PID control algorithm ,and deviation detection of three roll-centering device is achieved using image processing method.Keyword:PC, PCI, Image Processing0背景三辊定心装置是穿孔机的重要设备,对钢管质量有直接的影响,每次三辊定心装置修复后都要进行检测,将其中心控制在一定范围内。
现有方法是将修复过的三辊定心装置安装在检测台架上,将标准样棒放入三个辊子内夹紧,通过顶针辅助,人工测量中心偏差,精度差、效率低。
遥操作机器人系统软组织环境触觉建模实验

遥操作机器人系统软组织环境触觉建模实验徐晶晶;陈孝凯;曾庆军【摘要】软组织作业环境作为面向微创手术的遥操作机器人系统的一个显著特点,其动力学精确建模具有非常重要的意义.本文研制了一套遥操作机器人实验系统,在动物软组织插针实验的基础上提出了一种交互过程中的非线性软组织力反馈触觉模型,设计了该模型动力学参数辨识的实验研究方法,并通过最小二乘法辨识模型参数.结果表明:本文建立的非线性软组织动力学模型比较准确,能够反映插针过程中力的变化过程,可以应用于虚拟手术仿真和控制策略的研究.【期刊名称】《江苏科技大学学报(自然科学版)》【年(卷),期】2010(024)001【总页数】4页(P79-82)【关键词】遥操作机器人;微创手术;软组织;触觉模型【作者】徐晶晶;陈孝凯;曾庆军【作者单位】江苏科技大学,电子信息学院,江苏,镇江,212003;江苏科技大学,电子信息学院,江苏,镇江,212003;江苏科技大学,电子信息学院,江苏,镇江,212003【正文语种】中文【中图分类】TP391.9遥操作机器人(Tele-manipulation Robot)是指在人的操纵下能在人难以接近(距离遥远、对人有害或操作有难度)的环境中完成比较复杂的精细操作的一种远距离操作系统[1].将遥操作技术与微创手术(Miuimally Inlasive Surgery,MIS)技术结合而成的遥操作机器人微创外科手术(TMIS)系统既克服了传统MIS技术的主要缺点,又可用作训练工具,使得用于外科的遥操作机器人技术成为非常重要的机器人应用技术之一[2-3].人体软组织是外科手术机器人的操作对象,建模中不仅要根据其几何特性建立几何模型,而且还要根据其生物力学特性建立动力学模型.在虚拟手术仿真中,这2种模型分别在视觉上和触觉上产生一种逼真的感觉.此外在机器人辅助的微创手术系统中软组织作为手术器械的作业环境也倍受关注,因此软组织的力反馈触觉模型是目前国内外研究的热点.由于软组织在自然条件下(即在活体中)与在实验测试条件下呈现出不同的行为特征,而且软组织结构不同其行为特征也不同.近年来国内外学者开展了针对与安装有传感器的手术器械交互时的特性进行直接测量及建模研究,并完成了一些动物软组织生物力学实验,特别是软组织插针实验.结果表明,动物体软组织插针交互力具有非常明显的非线性[4-6].文献[7-8]对几种动物器官组织的插针实验结果表明:医用插针与器官组织的主要作用力还是惯性力、摩擦力和弹性力.当器械作用方向与器官表面法向之间存在倾角时,其受力为弹性力和表面摩擦力;而当刺穿表面胶包膜进入组织后受到的主要是摩擦力.文献[9]给出了实际活体的实验受力数据,Barbe采用文献[9]的数据并在文献[10]的基础上研究得出了经实际活体实验受力曲线而拟合(或辨识)的动力学模型[5](1)式中,d0是针插猪肝的起始位置,设为常数;d1是针刺破猪肝膜的位置;参数f0,f1,a0,a1,b0,b1是与软组织机械特性有关的常数.本文针对面向MIS的遥操作机器人系统,提出了一种非线性软组织环境动力学模型,设计软组织环境模型动力学参数辨识的实验研究方法,通过插针实验在线辨识模型参数,建立了一种较准确的软组织环境交互力反馈触觉模型.1 软组织环境力反馈触觉建模实验系统研制1.1 系统结构及工作原理本文在现有的单自由度遥操作机器人系统的基础上,针对软组织环境力反馈触觉建模实验设计了一套实验系统(图1).图1 系统结构图Fig.1 System structure diagram系统的工作原理如下:在上位机的操作界面设置不同的电机转速,设置完成后点击开始按钮,上位机通过RS-232串口把转速信息传递给单片机,在单片机内通过一定的算法产生PWM波来控制电机的转速,电机以给定速度转动,并带动带有力和位置传感器的单自由度机械手运动,使手术针与软组织产生交互运动.同时上位机通过PCI 数据采集卡实时采集手术针与软组织的交互力和位置信号,将它提供给控制模块,保存在硬盘中并实时显示,进而通过触觉模型计算得到软组织的力反馈触觉模型.1.2 实验系统设计实验系统的电路主要由两大部分组成:模拟量滤波放大电路部分和数字计算机接口及功率驱动部分组成(图2).数据采集系统选用的是研华公司的PCI-1711L数据采集卡.位置和力传感器的信号经过处理后送到数据采集卡.数字电路部分主要分为串口通信电路、单片机及其外围电路和电机驱动电路3个部分.PC机由一定的控制算法产生的电机控制信号经PC机的串口COM1输出,经MAX232电平转换后送至单片机AT89C2051,再由单片机产生PWM脉冲,经光耦TLP421-4控制直流力矩电机转动.图2 信号检测、调理及电机驱动原理Fig.2 Block diagram of signal detection,conditioning and motor drive根据实验要求,机械手一般要求工作在低速、平稳的场合,并能长期堵转,因此要选用低转速、大力矩的直流电机作为该系统的执行元件.本文使用的是北京勇光高特微电机有限公司生产的LY系列稀土永磁直流力矩电动机(型号110LY53).整个系统软件以Visual C++6.0为开发平台.其中主程序是VC++中的单文档框架程序,主程序中有一个10 ms定时器的回调函数.在这个回调函数中调用数据采集处理显示程序,此程序再调用电压值与角度值转换和电压值与力值转换程序来完成它们的转换,并同时将数据存储到文件中.此回调函数还可调用控制算法及控制量输出程序,再进一步调用串口通信程序把电机的驱动信息发送给单片机.下位机主要由单片机构成,负责接收上位机发送的转动方向以及转速大小等信息来控制PWM波的波形,进而控制电机的转动.2 软组织力反馈触觉建模实验结果及分析2.1 软组织插针实验测试结果及分析本文取用屠宰6 h以内的带有包膜的猪肝脏(尺寸为50 mm×80 mm×15 mm),将它装入中部有圆洞的正方盒中并固定在实验台上,进行软组织插针实验,如图3所示.为了减小实验的随机性,实验中对肝脏喷以生理盐水,尽可能真实地模拟生物组织所处的边界条件,同时注意变换接触位置,避免手术针在同一部位重复插针.图3 软组织建模实验系统Fig.3 Experimental system for soft tissue modeling 实验过程中测得固定在机械手上的手术针的力与位置信号,通过Matlab对实验数据进行平滑滤波,得到与软组织环境接触过程中手术针的位置(P)与受力(F)的关系曲线(图4).图4 手术针与软组织环境接触过程中位置与力关系曲线Fig.4 Position-force curve during surgical needle inserted into soft tissue environment从图4可知:手术针在d0位置以前没有和肝脏接触,此时针不受力,当手术针运动到d0位置时,手术针开始接触肝脏.从d0到d1这一段距离由于猪肝脏包膜的弹性比较大,手术针还没有刺穿包膜,手术针受到的主要是肝脏包膜的弹性力,且此弹性力与软组织表面的形变相关.在d1位置肝脏包膜被刺破时,手术针的受力会突然下降,此后手术针在肝脏内部运动,手术针会受到它与软组织的摩擦力和切割力的共同作用,其受力大小随着插入深度的增加而增加.2.2 软组织力反馈触觉建模及参数辨识由实验结果可知,连续插针过程中,手术刀所受的是轴向弹性力、摩擦力和切割力之和,即f(x)=fs(x)+ff(x)+fc(x)式中:x表示手术针在软组织内的位移;fs(x)表示在组织包膜被刺破前所受的弹性力;ff(x)和fc(x)表示软组织包膜被刺破后受到的摩擦力和切割力[5].本文认为反馈力采集过程为一连续过程,为对连续的动态反馈力建模,本文进行了如下的简化:手术针运动只限制在针体所处的平面内,通常认为手术针非常锋利,所以不考虑垂直切割面的力.令d0<x<d1时,f(x)=fs(x);x>d1时,f(x)=ff(x),由此本文建立了如式(2)的软组织交互过程中力反馈触觉模型(2)假设手术针在d0=11.45 mm处与软组织接触,在d1=20.97 mm处刺破软组织包膜,最终手术针在23.98 mm处穿刺而出,通过最小二乘法对式(2)的模型参数进行辨识,结果如下同时,本文对文献[5]中提出的猪肝受力模型做了适当变换,结果见式(3)(3)用式(3)对本文实验数据进行模型参数辨识,结果如下图5为软组织力反馈触觉模型辨识结果及误差曲线.图中辨识结果1对应于本文提出的模型式(2),辨识结果2对应于文献[5]中的模型变换式(3).由辨识结果可知,本文提出的软组织环境交互过程力反馈触觉模型较准确,手术针在软组织内部运动过程中,与文献[5]中提出的模型相比较,本文提出的模型受力误差的绝对值较小于0.008 N,能更准确地反应手术针的实际受力情况,而且因为模型结构较简单,有更强的适用性.手术针刺破软组织包膜前所受的弹性力和表面摩擦力会由于实验方法的不同,如以不同速度插针、使用不同型号手术针也会对辨识模型的精确度有较大影响,在以后的实验中,将进一步实际测试以验证本文模型的有效性,提高建模的精确度.图5 软组织力反馈触觉模型辨识结果及误差曲线Fig.5 Identification results and error curves of soft tissue hepatic force feedback model3 结论本文针对面向微创手术遥操作机器人系统的软组织作业环境,设计了软组织插针实验的测试系统,通过在线插针实验采集手术针与交互过程中位移和力的变化特性,得出力与位置之间的关系,进而建立生物软组织力反馈触觉模型.使用最小二乘法辨识软组织作业环境的动力学参数,建立了一种非线性的软组织力反馈触觉模型,具有实时性和准确性.该模型可以应用于虚拟手术仿真以及机器人辅助的微创手术系统控制仿真中.参考文献[1] 石锦,曾庆军.网络遥操作机器人系统视频传输及同步技术[J]. 江苏科技大学学报:自然科学版,2007, 21(1):52-55.Shi Jin, Zeng Qingjun. Network video transmission and synchronization fortelerobot system[J]. Journal of Jiangsu University of Science and Technology:Natural Science Edition, 2007, 21(1):52-55.(in Chinese)[2] Gangloff J, Mathelin M, Soler L. Model predictive control for compensation of cyclic organ motions in teleoperated laparoscopic surgery[J]. IEEE Transactions on Control Systems Technology, 2006,14(2):235-246.[3] Tavakoli M, Patel R V, Moallem M. A haptic interface for computer-integrated endoscopic surgery and training[J]. Virtual Reality, 2006(9):160-176.[4] 宋卫国,原魁.用于触觉建模的生物组织切割特征多参量采集[J].系统仿真,2006, 18(1):204-206.Song Weiguo, Yuan Kui.Measuring cutting parameters of soft tissue for haptic modeling[J]. Journal of System Simulation,2006, 18(1):204-206. (in Chinese)[5] Barbe L, Bayle B, Mathelin M. Bilateral controllers for teleoperated percutaneous interventions:evaluation andimprovements[C]//USA:American Control Conference Minneapolis, 2006.[6] 章湘明,马念科,杨帆,等.心肌组织力学行为的测试系统[J].清华大学学报:自然科学版,2006, 46(11):1941-1944.Zhang Xiangming, Ma Nianke, Yang Fan, et al. Experimental measurements of the biomechanical properties of cardiac tissues[J]. Journal of Tsinghua University:Natural Science Edition,2006, 46(11):1941-1944.(in Chinese) [7] Okamura A M, Simone C, O’Leary M. Force modeling for needle insertion into soft tissue[J].IEEE Trans On Biome-dical Engineering,2004,10(51):1707-1716.[8] Bzostek A, Kumar R, Diaz L, et al. Force vs. deformation in soft tissue puncture[C]// Submitted for Consideration to MICCAI’:Cambridge, 1999.[9] Maurin B, Bacbe L, Bayle B, et al. In vivo study of forces during needle insertions[J]. Proceedings of Medical Robotics, 2004(3):14-18.[10] Fung Y C. Biomechanics: mechanical properties of living tissues[J]. Springer Verlag, 1993(11):242-251.。
研华数据采集卡pci 1710

接线端子板采用ADAM-3968型,是DIN导轨安装的68芯 SCSI-II接线端子板,用于各种输入输出信号线的连接。
ADAM-3968接线端子板
用PCI-1710HG板卡构成的控制系统框图如图6-6所示。
PCI-1710HG板卡设备的安装
首先进入研华公司官方网站找到并 下载下列程序:PCI1710.exe、DevMgr.exe、PortIO.exe、 All_Examples.exe、Utility.exe等;
图6-8 PCI-1710HG板卡安装
重新开启计算机,进入WindowsXP系统, 首先出现“找到新的硬件向导”对话框, 选择“自动安装软件”项,点击“下一步” 按钮,计算机将自动完成Advantech PCI1710HG Device驱动程序的安装。
系统自动地为PCI板卡设备分配中断和基地 址,用户无需关心。
大部分数据采集应用实例都使用了驱动软件。软 件层中的驱动软件可以直接对数据采集件的寄存器 编程,管理数据采集硬件的操作并把它和处理器中 断,DMA和内存这样的计算机资源结合在一起。驱 动软件隐藏了复杂的硬件底层编程细节,为用户提 供容易理解的接口。
系统特点
基于PC的DAQ系统(简称PCs)的基本特点 是,输入输出装置为板卡的形式,并将板卡直接 与个人计算机的系统总线相连,即直接插在计算 机主机的扩展槽上。这些输入输出板卡往往按照 某种标准由第三方批量生产,开发者或用户可以 直接在市场上购买,也可以由开发者自行制作。 一块板卡的点数(指测控信号的数量)少的有几 点,多的可达24点、32点甚至更多。
数据采集卡的种类
基于PC总线的板卡种类很多,其分类方法也有很多 种。按照板卡处理信号的不同可以分为模拟量输入板卡 (A/D卡)、模拟量输出板卡(D/A卡)、开关量输入板卡、开 关量输出板卡、脉冲量输入板卡、多功能板卡等。其中多 功能板卡可以集成多个功能,如数字量输入/输出板卡将 模拟量输入和数字量输入/输出集成在同一张卡上。根据 总线的不同,可分为PCI板卡和ISA板卡。
xPC环境下PCI-1711数据采集卡驱动编写方法研究

xPC环境下PCI-1711数据采集卡驱动编写方法研究
蔡君
【期刊名称】《仪器仪表用户》
【年(卷),期】2007(014)003
【摘要】利用实时仿真开发平台xPC Target进行实时控制系统开发,具有周期短、费用低、效率高的特点,但是很多数据采集板卡不被xPC环境支持,需要自己编写驱动程序.本文论述了在xPC环境下采用C MEX S函数编写PCI-1711数据采集卡驱动程序的方法和要点.该方法同样适用于其他不被xPC支持的板卡驱动的开发.
【总页数】2页(P124-125)
【作者】蔡君
【作者单位】东南大学,自动化学院,南京,210096
【正文语种】中文
【中图分类】TP311.1
【相关文献】
1.力控组态环境下数据采集卡驱动程序的开发 [J], 王生铁;张计科;张立波;何林森
2.采用C MEX S函数编写xPC环境下设备驱动模块的研究 [J], 时亚忠;王旭永;张红伟
3.RTAI环境下数据采集卡的Comedi驱动 [J], 杨瀚波;肖连
4.WINDOWS环境下的数据采集卡驱动程序开发 [J], 林加宁
5.在LabVIEW中编写数据采集卡驱动程序不同方法的比较 [J], 朱立军;张元培;都俊超;李宁;白乔
因版权原因,仅展示原文概要,查看原文内容请购买。
炉温的单闭环控制系统的设计
过程控制系统课程设计设计题目:炉温的单闭环控制系统的设计摘要温度是工业对象中一种重要的参数,特别在冶金、化工、机械各类工业中,广泛使用各种加热炉、热处理炉和反应炉等。
由于炉子的种类不同,因此所采用的加热方法及燃料也不同,如煤气、天然气、油和电等。
但是就其控制系统本身的动态特性来说,基本上属于一阶纯滞后环节,因而在控制算法上亦基本相同。
随着社会的发展,在生活和工业中已经广泛的使用温度控制,而现代化炉温控制已经开始自动化PID控制时代了。
控制炉温恒定是满足生产、提高效率和节能减耗的关键技术,其具有很多优势,能够进一步提高控制精度,同时使得加热时间大大降低,不短提高能源的利用,因此也是越来越受到重视。
为了更好的确保加热炉的安全运行,因此加强炉温控制系统的设计与实现的研究非常有必要。
基于此本文分析了基于PID算法的炉温控制系统的设计与实现。
关键词:比例;积分;微分;炉温控制目录摘要 (I)一、概述 (1)二、课程设计任务及要求 (2)2.1 设计任务 (2)2.2 设计要求 (2)三、理论设计 (3)3.1方案论证 (3)3.2 系统设计 (3)3.3炉温控制系统硬件工作原理 (6)3.3.1前向通道工作过程 (6)3.3.2 反馈通道工作过程 (6)四、系统设计 (7)4.1 PID算法设计 (7)4.2软件设计 (9)4.2.1 画面的制作 (9)4.2.2 建立数据词典 (10)4.2.3 建立动画连接 (11)五、调试过程与结果 (12)5.1 调解P参数 (12)5.2 调节I参数 (13)5.3 调节D参数 (14)5.4 综合调试P、I、D三个参数 (15)六、实验中所用仪器设备清单 (16)七、收获与体会 (20)一、概述近年来随着热处理工艺广泛应用于加工过程,热处理中温度的控制精度和控制规律的优劣直接影响到热处理工艺的好坏。
电阻炉是热处理工艺中应用最多的加热设备,研究电阻炉温度控制方法具有重要意义。
轿车座椅测试设备设计

轿车座椅测试设备设计作者:高圆来源:《汽车与驾驶维修(维修版)》2020年第07期关键词:Rockwell Allen-Bradley PLC ;工控机;LabVIEW ;数据采集0 引言座椅属于汽车的基本内饰件,也是重要的安全部件。
在汽车行使过程中,它将人体和车身固定在一起,直接决定了车内乘员的驾乘舒适性和安全性。
奔驰在1886年制成的世界上最早的汽车,其座垫是用棉花、谷物杆子等软材料制成,用木板和木条制成靠背。
经过一百多年的发展,随着技术不断发展进步,人的思想和需求也越来越高。
汽车座椅不仅仅是乘坐和美观的需求,更重要的是关系到汽车的驾乘安全性和舒适性,是集控制工程、人机工程及机械振动等融为一体的系统工程产品。
本文主要讨论、研究座椅测试设备的测试原理及相关的软、硬件设计与研究。
1 轿车座椅测试系统的设计要求本文的主要任务是根据李尔的某项目,设计汽车座椅电功能的综合性能检测设备。
座椅电功能的测试项目,分别是对座椅滑道电机、座盆电机、升降电机、靠背电机、震动电机、SBR 感应垫、安全气囊、安全插扣、加热垫、加热模块、记忆模块以及线束等进行检测与数据存储。
设计的要求是检测座椅各电阻功能与各电流功能。
1.1 测试方法、原理1.1.1 电阻的测试项电阻的测试项有SBR感应垫、安全气囊、安全插扣及线束搭铁。
笔者采用4端子测试法测量电阻,可以精确测量不同阻值的线圈,如电机、变压器等;还可以测试继电器、开关及插接器的接触电阻,芯片电感的直流电阻,打印机基板的图形电阻,以及各种电阻器的出厂检查等。
该仪器具有温度补偿、比较器及数据输出等功能。
因为4端子测试法较好地避免了导线电阻和接触电阻的影响,能够减小误差,因此广泛地应用于各种设备的电阻测试中,可有效应用于制造、检查生产线,以及系统行业等的电阻计(图1)。
1.1.2 电流的测试项电流的测试项有座椅滑道电机、座盆电机、升降电机、靠背电机、震动电机、加热垫、加热模块及记忆模块。
基于LabVIEW和PCI-1711的过程控制实验系统设计

基于LabVIEW和PCI-1711的过程控制实验系统设计葛亚明;于鑫;吕淑平;李军【摘要】过程控制实验系统既要对输入信号进行采集,又要对输出信号进行处理,更要求有可视化的监控视图.采用PCI 1711数据采集卡对控制对象的输入信号进行采集,使用LabVIEW软件对采集量进行显示和处理,根据设定的控制指标,采用PID等控制算法,经PCI-1711数据采集卡和驱动放大电路输出,对电动调节阀、变频器等执行机构进行控制,完成液位、流量、压力等常用工业过程控制量的数据采集和控制.PCI 1711数据采集卡和LabVIEW软件的引入,可以实现对过程控制系统的参数测试、显示、存储、分析及控制,提高了原有实验平台的功能扩展性.【期刊名称】《实验技术与管理》【年(卷),期】2015(032)001【总页数】4页(P108-111)【关键词】过程控制;LabVIEW;PCI-1711;数据采集【作者】葛亚明;于鑫;吕淑平;李军【作者单位】哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001;哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001;哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001【正文语种】中文【中图分类】TP273工业过程控制系统常以智能仪表和PLC为主控制器,完成液位、流量、压力等过程量的数据采集及控制,并使用组态软件做监控视图。
为了提高设备的利用率,较好地提高原有实验平台的功能扩展性,拓展学生的学习思维,以过程控制实验室现有实验设备为依托,采用LabVIEW和PCI-1711数据采集卡完成液位等信号的给定值控制[1-4]。
PCI-1711数据采集卡是一种插卡式的数据采集设备,插入台式计算机PCI槽或笔记本电脑PCMCIA槽中即可使用,是一种典型的虚拟仪器硬件结构,它通常要求在计算机外面根据需要配备某种信号调理设备。
本文利用LabVIEW软件可视化的编程方式对PCI-1711采集到的信号进行处理[5],并对输出信号适当放大,给出控制信号,构成一个完整的闭环过程控制系统。
基于PCI-1713和LabVIEW的高速数据采集系统设计

基于PCI-1713和LabVIEW的高速数据采集系统设计A Design for High Speed Data Acquisition System Based on PCI-1713 and LabVIEW(兰州交通大学)王梦玲,王思明Wang, Mengling Wang,Siming摘要:本文介绍了一种基于图形化虚拟仪器编程软件LabVIEW的高速数据采集系统设计方案,并且详细论述了32位LabVIEW驱动函数的功能和使用方法。
系统以研华公司的高速数据采集卡PCI-1713为硬件平台,采用中断触发方式进行数据采集,并将数据存储到文本文件中。
实验结果表明,该系统能够有效地完成对信号的高速数据采集和实时图形显示。
关键词:PCI-1713;LabVIEW;数据采集;研华32位LabVIEW驱动;中断触发中图分类号:TP274 文献标识码:A Abstract:In this paper, a design proposal for high speed data acquisition system based on virtual instrument programming software LabVIEW and the function of 32-bit LabVIEW driver are described. Advantech PCI-1713 is used as the hardware platform of the system, which uses interrupt triggering to acquire data and then saves them to text file. The system is proved to work well to accomplish high speed data acquisition and real-time graph display by test.Keywords:PCI-1713; data acquisition; LabVIEW; Advantech 32-bit LabVIEW driver; interrupt triggering1引言目前的高速数据采集系统设计主要是基于VB、VC等文本编程语言,虽然这类语言的灵活性好,执行效率高,但若要在采集的同时将数据实时绘制成图形,则难度很大,对采集数据的分析处理也只能借助于其他工具才能实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
余文成:基于数据采集4-PCI-1711L的振动劐试系统的设计
本测试系统软件采用的VB进行用户界面设计。
如图3所示:
图3
研华板卡PCI一1711L自带的32位DLL驱动程序是研华为诸如VC、VB、DELPHI、BorlandC+十、CHBuilder等高级语言提供的接口,通过这个驱动程序,编程人员可以方便的对硬件进行编程控制。
详细掌握该驱动程序是编制数据采集程序的基础。
32位DLL驱动程序主要包括10类函数及其相应的数据结构,这些函数和数据结构在Adsapi32.1ib中实现。
这10类函数分别是:设备函数、模拟输入函数组、模拟输出函数组、数字输入/输出函数组、计数器函数组、温度测量函数组、报警函数组、端口函数组、通信函数组、事件函数组。
可以把这10类函数分为两个部分:设备函数部分和操作函数部分。
设备函数部分负责获取硬件特征和开关硬件。
而操作函数部分则在硬件设备就绪以后,进行具体的采集、通信、输出、报警等工作。
具体工作结束后,调用设备函数关闭设备。
由于MATALAB具有的强大计算功能,本系统把从数据采集卡采样得到的数据送到MATLAB进行处理,并用图形的形式在VB编的主界面显示。
VB和MATLAB接口编程是本实验的一个关键点,在这里采用CoM组件技术,它是利用MATLAB的一个工具MATLABCOMBuilder将M函数文件转换成COM组件,然后在VB集成开发环境中直接调用该组件,生成的COM组件是进程内组件,是以DLL的形式存在的。
3.2基于a]M组件的VB与M芦mAB接口编程的实现(1)系统要求
使用这种方法对系统的要求:
①MATLAB6.5:
②MATLABCompiler3.0:
(要)MATLABCOMBuilder1.0:
④MicrosoftVisualBasic6.0:
@MicrosoftVisualC++6.0。
(2)接口函数要求
①接口函数以M文件名为函数名。
②接121函数的第一个参数表示用于输出的参数的个数。
③在接口函数的参数中,作为输入的参数必须是doulbe类型。
而作为输出的参数必须是variant类型。
(3)设计oom组件
在MATLAB提示行中输入comtool,出现MATI,ABCOMBuilder界面,新建一个工程,出现NewProjectSet—tings对话框,输入组件名Setting,同样加入类Setting,并在编译选项中选择使用图形库句柄。
这样设置完成后,单击OK返回主界面。
然后激活左栏的M—files文件夹,单击AddFile载入Corrd31d.rn文件。
最后单击Build,编译ComBld.ITI生成COM组件。
(4)混合编程
①设计VB主程序;
②载人00M组件;
③在通用声明栏中声明一个Setting组件;
④在模块中为theMatlab指定一个Setting组件;
⑤在模块中调用接口函数;
⑥编译,执行。
4测试结果分析处理
首先设置好电荷放大器的参数,在本试验中,设置电荷放大器上的传感器灵敏度为5.1,使其与所选的传感器灵敏度一致,再设置其放大器放大倍数为100(可以在程序中还原信号),然后设置上限频率和下限频率分别为
3KHz和1Hz,最后打开其电源,给梁一个振动激励,使其产生一个振动信号,然后点击Ⅶ主界面上的“运行”,运行软件驱动采集卡试验获取数据。
然后点击界面上的时域波形,则会弹出如图4,图5所示,即悬臂梁振幅随时问的变化过程及幅频曲线。
圈4
本测试系统中,只要设置的采样频率满足时域采样定理,那么采集来的信号就能不失真恢复成原来连续的信号,如图4所示。
悬臂梁的弯曲振动的特征方程是∞s犀c堆=一1,其固有频率相应的为
(下转第66页)万方数据
(1f-量与测试技表》2009年第36豢第{1期
由于自动气象观测系统(自动气象站)项目太多,无
法采用传递比较法,校准结果的验证采用比对法(与四川
省气象计量检定所各实验室计量标准相同准确度等级的
标准装置进行比对);比对过程:在常湿下,将数字式标准
干湿表和同一地面气象综合有线遥测仪(温湿度传感
裹2器),放置于同环境中,通电、开机稳定不小于20min后开始读数,每隔lmin分别读取1次数字式标准干湿表y和同一地面气象综合有线遥测仪的湿度值Y,共读取10次,然后计算它们之间差值(示值误差)。
通过比对,结果如表2所示:
.3'95为温湿度变送器(重复性)的差值平均
Y95=一0.14%RH
U为数字式标准干湿表的测量不确定度
U=2.0%RH
根据以上比对结果湿度的Y95和了满足IY95一-l≤√U25+U2校准的结果得到验证。
5结论
经验证,自动气象观测系统湿度标准满足中国气象局自动气象站现场校准方法(试行)的要求,可以利用本标准开展自动气象观测系统(自动气象站)现场校准工作。
作者简介:张虎,男,工程师。
工作单位:四川省气象计量检定所。
通讯地址:610072成都市光华村街20号
李晓红,石鹏,四川省气象计量检定所(成都610072)。
收稿时间:2009一07—29
(上接第63页)
圈5魄=席厕,i二1,2,…
其中触≈(i一虿1)丌,净3,4,…
其基频为∞.=生器堑v厂可乃
通过此公式可将实验结果与理论值进行比较。
参考文献
[1]林卓然编.V'tsualBasic程序设计教程.电子工业出版杜,2004:3--65.
[2]张赛明,陈灵君.VB调用Matlab制作的∞M组件实现二者混合编程.微型电脑应用,2006,22(4):52~54.
[3]黄锡泉.基于COM组件的VB与MATLAB接口绾程.电脑编程技巧与维护,2004(8):19~21.
[4]黄长艺.机械工程测试技术基础(第2版).北京:机械工业出版社,200l:95—146.
作者简介:余文成,男,硕士研究生。
工作单位:中北大学武器装备与技术学院。
通讯地址:030051山西省太原市。
收稿时间:2009一06—10
(上接第64页)
沉孔,沉孔位置尺寸与焊在16号工字钢端面钢板上孔的位置相同。
(3)在防撞橡胶挡块与16号工字钢端面钢板上预先垫上2毫米厚钢板,再把防撞橡胶挡块用6个M12X35的沉头螺栓固定在16号工字钢端面钢板上。
(4)现场安装:在防撞橡胶挡块与限位块之间放置3毫米厚钢板,紧紧贴平后把16号工字钢另一个端面焊在衡器上,安装完毕后取出3毫米厚钢板,这样做的目的是保证防撞橡胶挡块与限位挡块间隙均匀。
(5)维护:定期检查防撞橡胶挡块破损情况,沉头螺栓是否松动。
6新限位装置的成效
新限位装置安装使用后半年多时间,我们只需在7月份夏天高温时节将薄的调节垫片换上,在12月份将厚的调节垫片换上即可,中间没有出现限位装置损坏现象,也没有出现衡器传感器因横向位移过大而折断损坏的故障,极大地提高了衡器的运转率。
参考文献
[1]唐文炳.电子衡器使用与维修手册.中国计量出版.
作者简介:赵才土,男.工程师。
工作单位:浙江虎山集团有限公司计量能源处。
通讯地址:324103浙江省江山市上铺。
徐子忠,浙江虎山集团有限公司(,rtb324103)。
收稿时间:2009一06—22万方数据。