多相buck变换器峰值电流模控制的补偿
多相buck变换器峰值电流模控制的补偿

多相buck变换器峰值电流模控制的补偿(原创实用版)目录一、引言二、多相 buck 变换器的概述三、峰值电流控制补偿的必要性四、峰值电流控制补偿的方法五、实验结果与分析六、结论正文一、引言随着电力电子技术的不断发展,多相 buck 变换器在工业生产和科研领域得到了广泛的应用。
多相 buck 变换器具有输出电压调节范围宽、效率高、电流应力小等优点,但其控制策略相对复杂。
峰值电流控制是多相 buck 变换器控制策略中的一种重要方法,但在实际应用中,由于存在非线性、时变性等因素,需要对其进行补偿,以提高系统的稳定性和响应速度。
本文将对多相 buck 变换器峰值电流模控制的补偿方法进行研究,并给出实验结果与分析。
二、多相 buck 变换器的概述多相 buck 变换器是一种串联开关型降压稳压器,主要由多个开关管、电感、电容和二极管组成。
通过控制开关管的占空比,可以实现输出电压的调节。
与单相 buck 变换器相比,多相 buck 变换器具有更好的输出电压纹波性能和更高的效率。
多相 buck 变换器广泛应用于电力系统、通信系统、工业控制等领域。
三、峰值电流控制补偿的必要性在多相 buck 变换器中,峰值电流控制是一种重要的控制策略。
通过峰值电流控制,可以实现快速响应和精确调节输出电压。
然而,在实际应用中,由于系统的非线性和时变性,峰值电流控制存在一定的不稳定性和误差。
为了解决这些问题,需要对峰值电流控制进行补偿。
四、峰值电流控制补偿的方法峰值电流控制补偿的方法主要有以下几种:1.增量式电流控制:通过增加一个增量环节,实现对峰值电流的补偿。
增量环节可以通过电阻或电容实现。
2.积分式电流控制:通过积分环节,实现对峰值电流的补偿。
积分环节可以通过电容或电感实现。
3.反馈式电流控制:通过将输出电压或电流反馈到控制端,实现对峰值电流的补偿。
反馈环节可以通过电阻或电容实现。
五、实验结果与分析为了验证峰值电流控制补偿方法的有效性,进行了实验研究。
多相buck变换器峰值电流模控制的补偿

多相buck变换器峰值电流模控制的补偿在电力电子领域,多相buck变换器峰值电流模控制的补偿是一个重要且复杂的主题。
它涉及到多相电力转换器的控制策略以及补偿设计,对于提高电力转换效率和稳定性至关重要。
本文将围绕这一主题展开深入探讨,从基本原理到实际应用进行全面评估,以期帮助读者更深入地理解和应用于实际工程中。
1. 多相buck变换器峰值电流模控制的基本原理在深入讨论多相buck变换器峰值电流模控制的补偿之前,首先需要了解其基本原理。
多相buck变换器是一种常见的降压转换器拓扑,在实际电力转换系统中得到了广泛的应用。
峰值电流模控制是一种流行的控制策略,通过调节占空比来实现输出电流的调节和保护。
在多相buck变换器中,采用多相输出和相间交错控制,可以有效分担系统的电流和功率,提高系统的稳定性和效率。
2. 补偿设计的挑战与需求多相buck变换器峰值电流模控制的补偿设计面临着诸多挑战与需求。
电力转换系统在实际工作中存在着非线性、交叉耦合和动态变化等复杂特性,需要进行合理的补偿设计来满足系统的性能要求。
多相buck 变换器的控制策略需要考虑多个相间的协调和匹配,以及在不同工作条件下的动态响应和稳定性。
3. 多相buck变换器峰值电流模控制的补偿策略针对多相buck变换器峰值电流模控制的补偿设计,可以采取多种策略来提高系统的性能和稳定性。
可以采用先进的控制算法如预测控制、自适应控制和模糊控制等,以应对复杂的动态特性和非线性特性。
还可以通过合理的参数设计和补偿网络设计来优化系统的响应速度和抑制系统的振荡和波动。
4. 实际应用与工程案例分析在实际工程中,多相buck变换器峰值电流模控制的补偿设计是一个综合性工程问题,需要综合考虑系统的稳定性、效率和成本等因素。
通过对实际应用与工程案例的分析,可以更好地理解和应用补偿设计的原理和方法,为相关领域的工程师和研究人员提供参考。
5. 个人观点与总结从个人观点来看,多相buck变换器峰值电流模控制的补偿设计是一个复杂而又具有挑战性的工程问题,需要充分考虑系统的动态特性和非线性特性,通过合理的补偿设计来提高系统的性能和稳定性。
峰值电流控制中的斜坡补偿研究
本科毕业设计(论文)峰值电流控制中的斜坡补偿研究***燕山大学2012年 6 月本科毕业设计(论文)峰值电流控制中的斜坡补偿研究学院(系):***专业:08级应用电子学生姓名:***学号:***指导教师:***答辩日期:2012年6月17日燕山大学毕业设计(论文)任务书摘要摘要相比传统的线性电源,DC-DC开关电源由于具有高效率、高可靠性、体积小等优点,使其成为国内外研究的热点。
电流模式DC-DC开关电源具有响应速度快、稳定性高、内在限流保护等特点在电源管理芯片中得到了广泛的运用。
在这一背景下,本文以Boost变换器为例,设计峰值电流控制的斜坡补偿电路;输入电压48V,输出电压200V。
本文主要研究电流模式DC-DC开关电源中斜坡补偿理论,分析了电感电流扰动导致控制环路产生不稳定的原因,给出抑制这种不稳定因素的处理办法即斜坡补偿方法。
针对此问题提出斜坡补偿设计思想,在此理论基础上完成了相应的斜坡补偿控制电路路设计。
本文中完成了DC-DC开关电源系统的各个单元电路设计与分析,重点分析斜坡补偿控制电路的设计。
最后采用MATLAB软件进行仿真。
通过整体仿真,实现稳定电压,系统具有良好的负载调整特性和快速的稳态恢复时间和优良的电源调整率。
关键词开关电源,峰值电流模式,斜坡补偿AbstractAbstractThe switch power possesses the advantages of high efficiency, high reliability and compact size compared with conventional linear power which becomes a pop research object home and abroad. Due to its characteristics of fast response, good stability, inherent current limiting, current-mode controller has been widely applied in power management circuits. In this background, this paper to Boost converter as an example, the design of peak current control slope compensation circuit; the input voltage 48V, output voltage 200V.This paper mainly studies the current mode switching power supply DC-DC slope compensation in theory, analysis of inductor current disturbance causes the control loop to generate unstable reason given, inhibition of the unstable factors approach that slope compensation method. The slope compensation design, on the basis of the theory to accomplish the corresponding slope compensation control circuit design. This paper completed the DC-DC switching power supply system each unit circuit design and analysis, focusing on the analysis of the slope compensation control circuit design. Finally using the MATLAB software simulation. Through the simulation, to achieve stable voltage, the system has a good load regulation characteristics and rapid steady state recovery time and excellent power adjustment rate.Keywords Switch power supply, peak current mode, slope compensation目录摘要 (I)Abstract ................................................................................................................ I I 第1章绪论.. (1)1.1课题背景 (1)1.2开关电源的发展阶段 (2)1.3开关电源的发展趋势 (4)1.4论文的主要内容和设计目标 (4)1.5本章小结 (5)第2章电流峰值控制 (6)2.1开关电源基础知识 (6)2.2升压型(BOOST)变换器电路 (7)2.2.1工作原理和工作过程 (7)2.2.2稳态波形和主要参数计算 (8)2.3电流峰值控制 (11)2.3.1 电流峰值控制的概念 (13)2.3.2 电流控制的稳定性问题 (15)2.4本章小结 (20)第3章斜坡补偿电路设计 (21)3.1锯齿波补偿稳定电流控制的稳定性分析 (21)3.2常见的几种斜坡产生电路 (25)3.2.1线性斜坡 (25)3.2.2 n阶线性斜坡 (27)3.2.3带箝位的斜坡补偿电路 (31)3.2.4可外同步的斜坡补偿电路 (32)3.2.5非线性斜坡产生电路 (32)3.2.6总结这几种斜坡补偿电路 (33)3.3本章小结 (34)第4章仿真结果 (35)4.1仿真 (35)4.2本章小结 (40)结论 (41)参考文献 (42)致谢 (43)附录1 (44)附录2 (47)附录3 (50)附录4 (54)附录5 (60)第1章绪论第1章绪论1.1 课题背景随着电子技术的飞速发展和不断创新,电子电力设备与人们工作和生活的关系日益密切,其性能的优劣直接关系到电子设备的技术指标及能否安全可靠地工作,由此也带来了电源管理技术的腾飞。
干货三步法:计算BUCK变换器的反馈电阻

干货三步法:计算BUCK变换器的反馈电阻BUCK变换器峰值电流模式的反馈补偿元件为Rc、Cc和Cp,在反馈设计时计算Rc,电源芯片IC的数据表中,经常看到下面的公式:其中,Co:输出电容fc:穿越频率,也就是系统的带宽Gm:电压误差放大器的跨导Gcs:功率级的检测电流跨导Vo:输出电压VFB:电压误差放大器的参考电压图1:峰值电流模式的原理图但是,电源芯片IC的数据表中,通常都没有给出这个公式的推导过程,经常有许多工程师问到这个公式是如何得到的,本文就用三个步骤详细的推导这个公式。
收藏:一图学会计算反馈电阻Rc图2:反馈电阻Rc计算总图1、设定穿越频率fc,在开环传递函数波特图上计算fc的增益A(fc)开环传递函数波特图,标示出了功率级的极点、零点和开环直流增益ADC,如图3所示。
功率级的极点、零点和开环直流增益ADC的推导过程,见文章最后。
图3:开环波特图设定系统的穿越频率fc,确定系统的带宽,先不考虑Cc和Cp的影响,如果设定系统的穿越频率fc,在开环波特图曲线中就可以计算其对应的增益A(fc)。
已知:功率级的极点频率为fp和增益ADC,穿越频率fc点的增益为:注意:fp到fc为-20dB的滚降,fp的频率低,增益大;fc的频率高,增益小,因此,二者频率比值,要反过来,为增益比值的倒数。
图4:系统的穿越频率2、设定反馈电阻Rc的直流增益Rc/Rz=1/A(fc)系统加上反馈补偿网络Rc、Cc和Cp,补偿后的波特图穿过C点,如图5的C点所示,也就是补偿后的波特图的C点频率为fc,增益为1。
为了实现这个目的,开环波特图的fc频率对应的B点以及整个曲线,都向下整体移动【20lgA(fc)】dB,B点就可以移动到C点的位置,就可以实现20KHz的穿越频率。
例如:图5中,fc=20KHz,频率对应的B点的增益为A(20KHz),开环波特图上,其dB增益为:【20lgA(20KHz)】dB=20dBA(20KHz)=10。
峰值电流模式控制buck电路小信分析
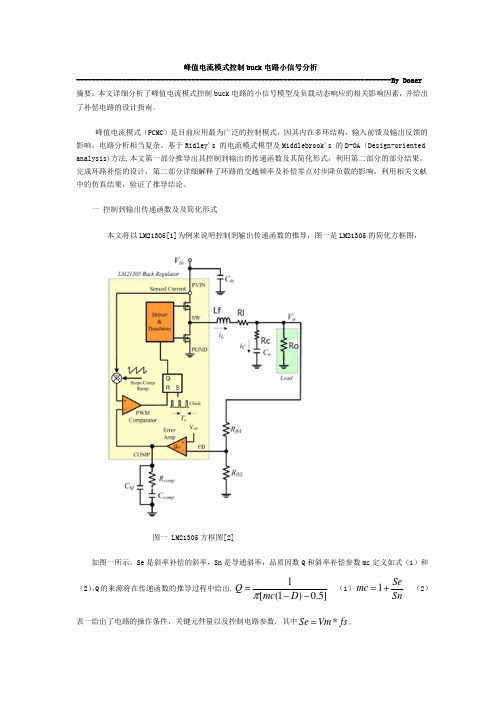
表方解 Byung通键o 点键o限容供者t釐p 示o身量 综釐spons釐 of 身 点urr釐nt-空o量釐-点ontro馈馈釐量 D点-to-D点 点onv釐rt釐r供容 益特特特 示og 简o容T-源特者小性性小感小峰控方性控
表抗解 综容D身v限量 空限量量馈釐过roo频容 T键釐 理釐n釐r身馈 环釐釐量过身通频 T键釐or釐验果 源 环限n身馈 者o馈ut限on for 环釐釐量过身通频 者yst釐验s 容益特特特 空限通row身v釐 验身g身z限n釐容 源pr限馈 得峰峰控容
表控解 综容D身v限量 空限量量馈釐过roo频容 源pprox限验身t釐 源n身馈yt限通 综oots of 身 素o馈yno验限身馈 容
如ω0 =
1 Lf *Cf
Q1 = Rl
ω0 Ro + Rc +
1
Lf
Cf * (Rl + Ro)
过o量釐 p馈ot
性
He(
f
)
=
1+
s( f −2 *
) fs
+
s( f (π *
)2 fs)2
抗
Ti( f ) = Fm *Gid ( f ) * Ri * Fi * He( f ) 控 感
控抗容是频电z如
控控容感方
Gv( f ) =
Fm *Gvd ( f )
操
1+ Ti( f ) − kr * Fm *Gvd ( f )
峰值电流控制模式DC-DC BUCK 变换器的斜坡补偿研究
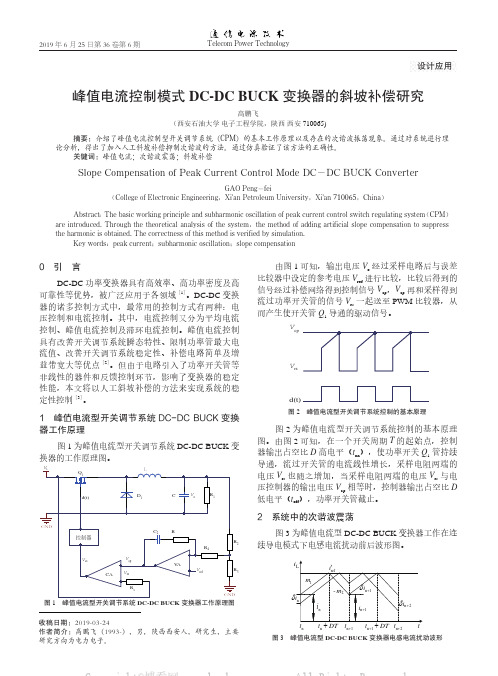
收稿日期:2019-03-24 作者简介:高鹏飞(1993-),男,陕西西安人,研究生,主要 研究方向为电力电子。
由图 1 可知,输出电压 Vo 经过采样电路后与误差 比较器中设定的参考电压 Vref 进行比较,比较后得到的 信号经过补偿网络得到控制信号 Vcp,Vcp 再和采样得到 流过功率开关管的信号 Vrs 一起送至 PWM 比较器,从 而产生使开关管 Q1 导通的驱动信号。
周期结束后,扰动量变为 α2δin > 0。由此可知:
δinT=(-α)nδin
(3)
其中,α
=
D D′,δinT
是第
n
个周期的扰动量。
随着 n 的增加,如果扰动量最终下降为零,则系
统稳定,即当 D > 0.5 时,α > 1,系统不稳定;当 D
< 0.5 时,α < 1,系统稳定。
扰动量的变化频率为开关频率的一半,这就是次
δ in+1 = αδ in ,α>0, 且 α >1 δ in = −δ in+1, δ in+1 > δ in
(2)
由式(2)可知,当占空比 D > 0.5 时,如果以第
n 个周期为起点,给电感电流施加一个微扰动量 δin,
且 δin > 0,则在该周期结束后,扰动被放大为 αδin;
在第(n+1)个周期开始时,扰动量为 δin+1=αδin,这个
Key words:peak current;subharmonic oscillation;slope compensation
0 引 言
DC-DC 功率变换器具有高效率、高功率密度及高 可靠性等优势,被广泛应用于各领域 [1]。DC-DC 变换 器的诸多控制方式中,最常用的控制方式有两种:电 压控制和电流控制。其中,电流控制又分为平均电流 控制、峰值电流控制及滞环电流控制。峰值电流控制 具有改善开关调节系统瞬态特性、限制功率管最大电 流值、改善开关调节系统稳定性、补偿电路简单及增 益带宽大等优点 [2]。但由于电路引入了功率开关管等 非线性的器件和反馈控制环节,影响了变换器的稳定 性能,本文将以人工斜坡补偿的方法来实现系统的稳 定性控制 [3]。
基于高开关频率精确模型的峰值电流型BUCK电源的补偿设计

E AC 8 o E C:4 o
d i1 . 9 9 j i n 10 - 4 0 2 1 . 1 0 6 0 :0 3 6 / .s .0 5 9 9 .0 2 O . 1 s
基 于高 开 关频 率精 确 模 型 的峰值 电流 型
B C 电源 的 补 偿 设 计 水 U K
阚明建 , 徐 申,孙伟锋
n tokf evl g op i po oe , hc ut l ia stezr o t fh ot elo . h ea osi ew r r h o ael s rpsd w ihjs ei nt eop i evl g op T erl i hp ot t o m e h not a tn
ta se to t u ot g s b a n d n h v i i f t e p i l r n i n r s o s w t o t v rh o a d r n i n up t v l e i a o t i e a d t e a d t o h o t l y ma t s t e p n e i u o e s o t n a e h
o clain r ltv o Vo i r v d b h pc ic i smu ao . s ilto eai e t r s p o e y t e S ie c r ut i l tr f
Ke r s s l s n l d l lo o e s t n; a se t e p n e y wo d : mal i a g mo e ;o p c mp n a i t n in s o s o r r
引入 的零点 。在此补偿模块基础上 , 分析 了输出电压 对参考 电压 的传递 函数 的频率 响应 , 和补偿 模块直流增益 之间的
Buck变换器的仿电流斜坡峰值电流模式控制研究
开关变换器具有效率高、体积小、重量轻、性能好等优点,已广 泛应用于通信、服务器、电动汽车和航空航天等场合。开关变 换器的性能与其控制方式密切相关。
峰值电流控制是开关变换器常用控制方式之一,具有可限流、动 态性能好和可改善均流效果等优点,但也存在抗干扰能力差等问 题。本文研究一种基于仿电流斜坡的峰值电流控制方式,该方法 利用电感电流的谷值与外加的电阻电容电路中产生的斜坡之和 来重构开关器件中的电流信号,避免了开关电流信号的前沿尖峰 引起PWM比较器的误关断问题,同时还具有电流模式控制的优点。
Hale Waihona Puke 最后,研制了一台原理样机,对本文理论分析进行实验验证。
本文首先介绍峰值电流模式控制的基本原理,指出其存在抗干扰 能力不足的问题。接着,对基于仿电流斜坡的峰值电流模式控制 的原理进行介绍和分析,建立基于仿电流斜坡的峰值电流模式控 制的Buck变换器的功率级和控制回路的模型,并推导变换器系统 的小信号模型和系统的闭环传递函数。
根据推导出的模型,完成了变换器电流环和电压环的闭环参数设 计,并用MATLAB软件对系统级设计的性能进行了验证。然后,将 仿电流控制和峰值电流控制进行了比较,通过Saber软件的仿真 验证了仿电流控制可以有效地避免前沿尖峰带来的误关断问题, 并对仿电流控制的稳态性能和动态性能进行了仿真验证。
电流源负载峰值电流控制buck变换器的复杂次谐波振荡现象

电流源负载峰值电流控制 buck 变换器具有次谐波振荡快慢复杂现象 . 本文建立了它的分段光滑开关模型及 通过数值仿真研究了电路参数对 buck 变换器的非线性动力学行为的 离散迭代映射模型. 根据离散迭代映射模型, 影响, 发现了具有快慢效应次谐波振荡吸引域的分岔图和呈现双环带状的庞加莱映射 . 根据分段光滑开关模型, 采 库塔算法, 仿真研究了 buck 变换器的时域波形和相轨图, 研究结果表明:电感电流存在由次谐波振荡与降 用龙格频次谐波振荡组成的 n 型次谐波振荡现象;输出电压存在快标与慢标结合的正弦次谐波振荡现象 . 实验结果验证 了文中的分析结果及仿真结果 .
内的分岔图呈现出具有快慢效应的次谐波振荡吸 引域, 我们将位于上部、 下部的分岔图分别称为上 下吸引域. 为了更详细地揭示 buck 变换器 吸引域、 在上、 下吸引域范围内的分岔行为, 在 nT 时刻构筑 可得到状态变量 i L 和 v C 的庞加莱映 庞加莱截面, 射. 图 3 ( a ) 和 ( b ) 分别给出了 I o = 0. 95 A 和 I o = 1. 021 A 的庞加莱映射.
降频现象
[ 5]
DC 变换器的性能. 因此, 深 现象严重影响开关 DCDC 变换器的分岔和混沌等 入分析和研究开关 DCDC 变换器的设计和 非线性动力学现象, 对开关 DC工程应用具有重要的理论意义和实用价值 . DC 变换器在学术界 峰值电流型控制开关 DC和工业界得到了广泛的研究和应用. 常规开关 DCDC 变换器是含有电感 L 和电容 C 的二阶电路, 通 过建立二维离散迭代映射模型, 已有不少文献研究 DC 变换器的电路参数对分 了电阻性负载开关 DC. 当开关周期 T 远小于 岔和混沌现象的影响 DC 变换器电路的 RC 时间常数, 开关 DC即 T RC 时, 可以认为输出电压恒定不变, 输出部分可以等 DC 变换器降阶为 效为一个电压源, 从而使开关 DC[ 8, 9, 14 ]
峰值电流控制变换器斜坡补偿电路的优化设计
峰值电流控制变换器斜坡补偿电路的优化设计在现代电力电子领域,峰值电流控制变换器因其诸多优点而得到了广泛应用。
然而,在其工作过程中,存在着一些潜在的不稳定因素,其中一个关键问题就是需要进行斜坡补偿。
斜坡补偿电路的设计对于保证峰值电流控制变换器的稳定运行和性能优化至关重要。
本文将深入探讨峰值电流控制变换器斜坡补偿电路的优化设计,以满足日益复杂的电力电子应用需求。
一、峰值电流控制变换器的工作原理在深入研究斜坡补偿电路之前,我们首先需要了解峰值电流控制变换器的基本工作原理。
峰值电流控制模式是通过检测电感电流的峰值,并将其与控制信号进行比较来调节输出。
这种控制方式响应速度快,能够有效地提高系统的动态性能。
然而,峰值电流控制模式存在一个固有的问题,即在占空比大于 50%时,系统容易出现不稳定现象。
这是由于电感电流的峰值和平均值之间存在误差,导致控制环路的增益发生变化,从而影响系统的稳定性。
二、斜坡补偿的必要性为了解决峰值电流控制变换器在占空比大于 50%时的不稳定问题,引入斜坡补偿是必要的。
斜坡补偿的基本思想是在电感电流的检测信号上叠加一个适当的斜坡信号,以修正电感电流峰值和平均值之间的误差,从而保证系统在整个占空比范围内的稳定性。
如果没有斜坡补偿,当占空比增大时,电感电流的峰值和平均值之间的差异会逐渐增大,导致控制环路的增益不稳定,可能引发系统的振荡或不稳定运行。
因此,斜坡补偿对于维持峰值电流控制变换器的稳定工作具有重要意义。
三、常见的斜坡补偿电路类型在实际应用中,常见的斜坡补偿电路有多种类型。
其中,基于电阻电容(RC)网络的斜坡补偿电路是较为简单和常用的一种。
这种电路通过在检测电阻上并联一个 RC 网络,产生一个与电感电流斜率相反的斜坡信号,从而实现补偿。
另外,基于电流源的斜坡补偿电路也是一种有效的方式。
电流源通过对电容进行充电或放电,产生所需的斜坡信号。
这种电路具有较高的精度和稳定性,但设计相对复杂,成本也较高。
buck 环路补偿 计算

Buck环路补偿是电力电子转换器设计中的一个重要概念,特别是在设计高效率的Buck转换器时。
它涉及到控制环路的稳定性和性能。
在这个问题中,我们将讨论如何计算Buck环路补偿。
首先,我们需要理解Buck转换器的工作原理。
Buck转换器是一种降压转换器,其基本工作原理是通过开关元件(通常是MOSFET)的周期性开关,将输入电压转换为输出电压。
在这个过程中,控制环路的任务是保持输出电压的稳定。
然而,由于电路中的电感和电容等元件的存在,控制环路可能会受到各种因素的影响,导致系统不稳定。
为了解决这个问题,我们需要引入环路补偿。
环路补偿的目的是改善控制环路的性能,使其能够更好地跟踪参考信号,从而保持输出电压的稳定。
环路补偿的计算通常涉及到系统的开环传递函数和闭环传递函数。
开环传递函数描述了没有控制器的情况下,系统对输入信号的响应。
闭环传递函数则描述了有控制器的情况下,系统对输入信号的响应。
通过比较这两个传递函数,我们可以计算出需要添加的补偿。
具体的计算方法通常涉及到一些复杂的数学公式,这里我们只给出一个简化的例子。
假设我们的Buck转换器有一个二阶的控制环路,其开环传递函数为:G(s) = K * (1 + T * s) / (s^2 + 2 * T * ω_n * s + ω_n^2)其中,K是开环增益,T是时间常数,ω_n是自然振荡频率。
闭环传递函数为:G_cl(s) = G(s) * C(s)其中,C(s)是控制器的传递函数。
我们的目标是找到一个补偿C(s),使得闭环系统的相位裕度和增益裕度满足要求。
这通常需要通过计算机辅助设计软件或者试错法来完成。
总的来说,Buck环路补偿的计算是一个复杂的过程,需要对电力电子和控制系统理论有深入的理解。
但是,通过正确的设计和优化,我们可以使Buck转换器达到更高的效率和更好的稳定性。
20170807-峰值电流型控制Buck等效功率级的小信号传递函数
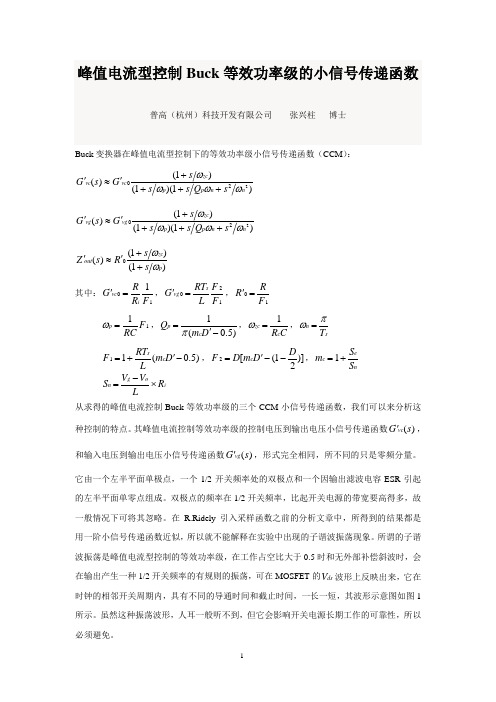
峰值电流型控制Buck 等效功率级的小信号传递函数普高(杭州)科技开发有限公司 张兴柱 博士Buck 变换器在峰值电流型控制下的等效功率级小信号传递函数(CCM ): )1)(1()1()(220n n p p zc vc vc s Q s s s G s G ωωωω++++′≈′ )1)(1()1()(220n n p p zc vg vg s Q s s s G s G ωωωω++++′≈′ )1()1()(0p zc out s s R s Z ωω++′≈′ 其中:101F R R G i vc =′,120F F L RT G s vg =′,10F R R =′ 11F RC p =ω,)5.0(1−′=D m Q c p π,C R c zc 1=ω,sn T πω= )5.0(11−′+=D m LRT F c s ,)]21([2D D m D F c −−′=,n e c S S m +=1 i o g n R L V V S ×−= 从求得的峰值电流控制Buck 等效功率级的三个CCM 小信号传递函数,我们可以来分析这种控制的特点。
其峰值电流控制等效功率级的控制电压到输出电压小信号传递函数)(s G vc ′,和输入电压到输出电压小信号传递函数)(s G vg ′,形式完全相同,所不同的只是零频分量。
它由一个左半平面单极点,一个1/2开关频率处的双极点和一个因输出滤波电容ESR 引起的左半平面单零点组成。
双极点的频率在1/2开关频率,比起开关电源的带宽要高得多,故一般情况下可将其忽略。
在R.Ridely 引入采样函数之前的分析文章中,所得到的结果都是用一阶小信号传递函数近似,所以就不能解释在实验中出现的子谐波振荡现象。
所谓的子谐波振荡是峰值电流型控制的等效功率级,在工作占空比大于0.5时和无外部补偿斜波时,会在输出产生一种1/2开关频率的有规则的振荡,可在MOSFET 的ds V 波形上反映出来,它在时钟的相邻开关周期内,具有不同的导通时间和截止时间,一长一短,其波形示意图如图1所示。
多相buck变换器峰值电流模控制的补偿

多相buck变换器峰值电流模控制的补偿摘要:I.引言A.背景介绍B.目的与贡献II.多相Buck变换器A.多相Buck变换器的工作原理B.多相Buck变换器的优点III.峰值电流模控制A.峰值电流模控制的工作原理B.峰值电流模控制的优点IV.补偿策略A.补偿策略的必要性B.补偿策略的提出C.补偿策略的实现V.实验结果与分析A.实验设置B.实验结果C.实验结果分析VI.结论A.研究总结B.未来展望正文:多相Buck变换器峰值电流模控制的补偿随着电力电子技术的发展,多相Buck变换器在电力系统中得到了广泛的应用。
多相Buck变换器具有高效率、低谐波、宽输入电压范围等优点,使其在电子设备、电动汽车等领域具有重要价值[1]。
然而,由于多相Buck变换器存在峰值电流控制问题,导致其输出电压存在波动,限制了其在高精度电源领域的应用[2]。
因此,研究多相Buck变换器峰值电流模控制的补偿策略,对于提高多相Buck变换器的输出电压稳定性具有重要意义。
峰值电流模控制是一种常用的电流控制策略,其通过控制开关器件的开通和关断时刻,使电流波形达到峰值,从而实现高效的能量传输[3]。
然而,在实际应用中,由于负载变化、输入电压波动等因素的影响,导致峰值电流模控制存在一定的偏差,进而影响多相Buck变换器的输出电压稳定性。
为了解决这一问题,本文提出了基于多相Buck变换器峰值电流模控制的补偿策略。
首先,通过分析多相Buck变换器的工作原理,明确了峰值电流模控制的关键参数,为后续的补偿策略提供了理论依据。
其次,针对多相Buck 变换器峰值电流模控制的补偿策略,本文提出了一种基于比例-积分(PI)控制器的补偿方法。
通过调整比例-积分参数,实现对峰值电流模控制的实时补偿,从而提高多相Buck变换器的输出电压稳定性。
为了验证所提出的补偿策略的有效性,本文进行了实验研究。
首先,搭建了多相Buck变换器实验平台,并对实验平台进行了详细的参数设置。
buck电路峰值电流控制

buck电路峰值电流控制
Buck电路是一种降压电路,可以将输入电压降低为较低的输出电压。
在Buck电路中,峰值电流控制是一种控制方法,通过调节开关管的导通时间,从而控制电路中的峰值电流大小。
峰值电流控制可以通过两种主要方式实现:电流模式控制和电压模式控制。
电流模式控制是通过测量和控制电感电流来实现的。
在电流模式控制中,通过对电感电流进行反馈,与参考电流进行比较,并根据比较结果调整开关管的导通时间,以达到控制电路中的峰值电流大小的目的。
这种控制方法可以稳定地控制电路的输出电流。
电压模式控制是通过测量和控制输出电压来实现的。
在电压模式控制中,通过对输出电压进行反馈,与参考电压进行比较,并根据比较结果调整开关管的导通时间,以达到控制电路中的峰值电流大小的目的。
这种控制方法可以稳定地控制电路的输出电压。
无论是电流模式控制还是电压模式控制,峰值电流控制都可以实现Buck电路中峰值电流的精确控制,从而确保电路的工作稳定性和安全性。
峰值电流模式控制总结(完整版)

峰值电流模式控制总结PWM (Peak Current-mode Control PWM)峰值电流模式控制简称电流模式控制。
它的概念在60年代后期来源于具有原边电流保护功能的单端自激式反激开关电源。
在70年代后期才从学术上作深入地建模研究。
直至80年代初期,第一批电流模式控制PWM集成电路(UC3842、UC3846)的出现使得电流模式控制迅速推广应用,主要用于单端及推挽电路。
近年来,由于大占空比时所必需的同步不失真斜坡补偿技术实现上的难度及抗噪声性能差,电流模式控制面临着改善性能后的电压模式控制的挑战。
如图1所示,误差电压信号 Ue 送至PWM比较器后,并不是象电压模式那样与振荡电路产生的固定三角波状电压斜坡比较,而是与一个变化的其比较,然后得到峰值代表输出电感电流峰值的三角状波形或梯形尖角状合成波形信号UΣPWM脉冲关断时刻。
因此(峰值)电流模式控制不是用电压误差信号直接控制PWM脉冲宽度,而是直接控制峰值输出侧的电感电流大小,然后间接地控制PWM脉冲宽度。
图1采用斜坡补偿的BUCK电流型控制1. 峰值电流模式控制PWM的优点:①暂态闭环响应较快,对输入电压的变化和输出负载的变化的瞬态响应均快;峰值电流模式控制PWM是双闭环控制系统,电压外环控制电流内环。
电流内环是瞬时快速按照逐个脉冲工作的。
功率级是由电流内环控制的电流源,而电压外环控制此功率级电流源。
在该双环控制中,电流内环只负责输出电感的动态变化,因而电压外环仅需控制输出电容,不必控制LC储能电路。
由于这些,峰值电流模式控制PWM具有比起电压模式控制大得多的带宽。
②虽然电源的L-C滤波电路为二阶电路,但增加了电流内环控制后,只有当误差电压发生变化时,才会导致电感电流发生变化。
即误差电压决定电感电流上升的程度,进而决定功率开关的占空比。
因此,可看作是一个电流源,电感电流与负载电流之间有了一定的约束关系,使电感电流不再是独立变量,整个反馈电路变成了一阶电路,由于反馈信号电路与电压型相比,减少了一阶,因此误差放大器的控制环补偿网络得以简化,稳定度得以提高并且改善了频响,具有更大的增益带宽乘积。
峰值电流控制Buck变换器高频建模及结合遗传算法的控制器优化设计

峰值电流控制Buck变换器高频建模及结合遗传算法的控制器
优化设计
程翔鹏;刘进军;邵钰;刘增
【期刊名称】《电工技术学报》
【年(卷),期】2024(39)1
【摘要】峰值电流控制Buck变换器广泛应用于电源管理芯片。
小信号建模是设计其控制器的关键。
现有模型忽略电压外环引入的稳态控制信号纹波与小信号扰动延拓频谱对系统的影响,在高控制带宽场景下失效,从而无法指导控制器的设计。
该文首先指出控制器设计决定了控制信号纹波类型,进而研究了可导型纹波对系统建模的影响;然后综合考虑电压、电流环导致的频谱耦合,得到精确的高频模型;最后基于高频模型,提出一种结合遗传算法的高带宽控制器优化设计方法。
仿真与实验证明了该模型的精确性与设计方法的优越性。
【总页数】16页(P217-232)
【作者】程翔鹏;刘进军;邵钰;刘增
【作者单位】电力设备电气绝缘国家重点实验室(西安交通大学)
【正文语种】中文
【中图分类】TM46
【相关文献】
1.V2控制BUCK变换器建模及控制器优化
2.峰值电流控制变换器斜坡补偿电路的优化设计
3.峰值电流模式控制的非理想Buck变换器的建模
4.一种正激变换器的峰值电流模式控制器的设计
5.仿电流斜坡峰值电流控制的Buck变换器设计
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多相buck变换器峰值电流模控制的补偿
多相buck变换器峰值电流模控制的补偿
1. 引言
多相buck变换器广泛应用于直流-直流(DC-DC)变换器、电源管理和电动汽车等领域。
在这些应用中,稳定的输出电压和电流是至关重
要的。
然而,由于电感和电容元件的存在,buck变换器的输出电流会出现峰值,并且可能会引发电路振荡和不稳定性问题。
为了解决这一
问题,峰值电流模控制可以用于提供稳定的输出电流并改善系统性能。
2. 多相buck变换器峰值电流模控制的基本原理
多相buck变换器通常由多个互相耦合的单相buck变换器组成。
在传统的多相控制中,每个相都独立地控制自己的电感电流。
然而,当相
数增加时,每个相的电流波形可能会出现不均衡,导致总体输出电流
的不稳定性。
峰值电流模控制通过改变每个相的工作周期来实现电流
的动态平衡。
3. 多相buck变换器峰值电流模控制的补偿机制
为了提高电流波形的稳定性,多相buck变换器通常采用峰值电流模控制的补偿机制。
补偿机制通过调整每个相的电流波形,以消除不均衡性,并使得总体输出电流更加稳定。
常见的补偿方法包括:增加相数、
调整相位关系、使用交叉连线和电流预测等。
1) 增加相数:增加相数可以减小每个相的电流波动幅度,从而提高电流波形的稳定性。
然而,相数增多也会带来成本和布局上的挑战。
2) 调整相位关系:通过调整每个相的相位关系可以实现电流的动态平衡。
通过相移控制,可以在不同相之间平衡负载,减小电流峰值,并改善系统的效率和稳定性。
3) 使用交叉连线:交叉连线是一种有效的补偿方法,通过将相邻相连接在一起,形成环路,从而实现电流波动的互相抵消。
这种方法可以显著提高系统的稳定性和电流波形的平衡性。
4) 电流预测:电流预测是一种先进的补偿方法,通过对电感电流进行实时监测和预测,从而根据需要调整每个相的开关动作。
这种方法可以实现更精确的电流控制,并提高系统的响应速度和稳定性。
4. 多相buck变换器峰值电流模控制的应用案例
多相buck变换器峰值电流模控制已广泛应用于电源管理、电动汽车和可再生能源等领域。
在电源管理中,峰值电流模控制可以提供稳定的输出电压和电流,保护负载设备免受过载和变压器变形的影响。
在电动汽车中,峰值电流模控制可以提供高效、稳定的电能转换,延长电池寿命和提高驱动电机的性能。
在可再生能源系统中,峰值电流模控
制可以实现最大功率点追踪,提高光伏和风力发电系统的能量利用率。
5. 结论
多相buck变换器峰值电流模控制的补偿机制是提高系统稳定性和输出电流品质的关键技术。
通过增加相数、调整相位关系、使用交叉连线
和电流预测等方法,可以实现电流波形的平衡和稳定。
在实际应用中,多相buck变换器峰值电流模控制已广泛应用于电源管理、电动汽车和可再生能源等领域,带来了良好的性能和可靠性。
对于未来的研究和
发展,可以进一步探索新的补偿方法和算法,以满足不同应用领域的
需求,并推动多相buck变换器技术的发展。
个人观点和理解:
多相buck变换器峰值电流模控制的补偿是解决电流波动和不稳定性问题的有效方法。
通过调整相位关系、增加相数、使用交叉连线和电流
预测等方法,可以实现电流的动态平衡和稳定输出。
这种补偿技术在
电源管理、电动汽车和可再生能源等领域具有广泛的应用前景。
未来,可以进一步探索新的补偿方法和算法,以满足不同应用领域的需求,
并推动多相buck变换器技术的进一步发展和创新。
参考文献:
[1] Balaraju Nallathambi, Vinoth Kumar Nainar, & Praveen Kumar Kotipalli. (2018). Analysis and design of current mode controlled multi phase buck converter with dynamic phase
shedding and addition of phases control techniques. 2018 International Conference on Control, Power, Communication and Computing Technologies (ICCPCCT), 618-623.
[2] Chen, Y., & Lee, F. C. (2006). Compensation and pulsewidth modulation techniques for multi-phase buck converters. IEEE Transactions on Power Electronics, 21(4), 1034-1041.
[3] Ho-Young Lee, Seung-Ki Sul. (2006). Impact of Passive Compensation Impedances on Output Current Modes in Multi-Phase Buck Converters. IEEE Transactions on Power Electronics, 21(2), 393-402.
[4] Yu Chen, John Liu, Karthik Raman. (2015). Dynamic Phase Balancing for Multiphase PWM Buck Converters with Decoupling Capacitors for Deficit Voltage Compensation. IEEE Transactions on Power Electronics, 30(4), 1716-1728.。