雷达--创新性的物位测量技术方案 - 科讯网
雷达物位计测试方案

雷达物位计测试方案雷达物位计是一种常用于工业领域的测量仪器,用于测量容器中物体的液位或固体物料的高度。
下面是我对雷达物位计测试方案的创作。
在进行雷达物位计的测试之前,首先需要准备好相关的设备和材料。
常见的雷达物位计测试工具包括:雷达物位计本身、电源供应器、连接电缆、测试介质和计算机。
测试步骤如下:1. 准备工作:将雷达物位计安装在待测容器上,并用连接电缆将雷达物位计与电源供应器和计算机连接好。
确保连接稳固可靠。
2. 设置参数:使用计算机软件或面板上的按键,根据待测容器的特性和介质的性质,设置合适的测试参数。
这些参数包括但不限于:工作频率、发射功率、接收增益等。
3. 开始测试:启动雷达物位计,并观察显示屏或计算机界面上的实时数据。
根据物位计的工作原理,它会向容器发射雷达波,然后测量波的回波时间和强度,从而计算出物体的高度或液位。
4. 校准和调试:如果测试结果与实际情况不符,可以尝试进行校准和调试。
校准时,可以使用已知物位或液位的容器进行比对,调整物位计的参数,使其输出准确的测量结果。
5. 数据处理和分析:将测试得到的数据导入计算机软件中,进行数据处理和分析。
根据需要,可以绘制曲线图、生成报表或进行其他统计分析。
6. 结果评估:根据测试结果,评估雷达物位计的性能和准确度。
可以与其他测量方法进行比对,以确定物位计的优势和局限性。
7. 结束测试:测试完成后,关闭雷达物位计和相关设备,拆卸物位计并进行清洁和维护。
需要注意的是,雷达物位计测试过程中要保证安全。
避免在高压或易爆环境下操作,注意防护措施,避免触电或发生其他意外。
雷达物位计测试方案需要经过准备、设置参数、开始测试、校准和调试、数据处理和分析、结果评估和结束测试等步骤。
通过科学的测试方法和严谨的数据处理,可以评估雷达物位计的性能和准确度,为工业生产提供可靠的物位测量数据。
雷达物位计的原理和应用
雷达物位计的原理和应用1. 引言雷达物位计是一种常见的工业自动化检测设备,被广泛应用于仓储、化工、制药、食品等行业的物料位检测和监控中。
本文将介绍雷达物位计的原理和应用。
2. 原理雷达物位计通过发射和接收雷达波进行物料位的测量。
其原理主要包括以下几个步骤:2.1 发射雷达波雷达物位计通过发射器发射一束脉冲雷达波,波长通常为10-30cm,频率为26GHz。
发射的雷达波会以一定的速度传播,并遇到物料时部分被吸收,部分被反射回来。
2.2 接收反射信号雷达物位计的接收器会接收到反射回来的雷达波信号。
接收的信号中包含了从物料表面反射回来的波形信息。
2.3 分析信号接收到的反射信号经过放大、滤波等处理后,被转换为数字信号进行分析。
通过对信号进行处理,并结合已知的物料介电常数和散射特性,可以准确地确定物料的位面。
3. 应用雷达物位计在工业自动化中有着广泛的应用,可以用于物料位的监测和控制。
以下是雷达物位计的一些典型应用场景:3.1 仓储行业在仓储行业中,雷达物位计常用于对物料的库存和供应进行监控。
通过实时测量物料的位面,可以及时了解物料的存储量,并进行库存的管理和调整。
3.2 化工行业在化工行业中,雷达物位计可以用于监测液体或粉体的储罐、槽等容器中的物料位。
通过及时获取物料的位面信息,可以控制物料的供给和排放,提高生产效率。
3.3 制药行业在制药行业中,雷达物位计可用于监测药品的配料和流程控制。
通过对药品容器中物料位的测量,可以准确控制配料的精度和时间,确保产品质量。
3.4 食品行业在食品行业中,雷达物位计可应用于储罐、料槽、料斗等容器的物料位检测。
通过实时监测物料位,可以帮助企业掌握原材料的库存状况,及时补充物料,确保生产不中断。
3.5 其他行业除了上述行业外,雷达物位计还广泛应用于电力、冶金、煤炭等行业。
它可以用于监测煤炭堆料、储罐物料等,帮助企业实现物料位业务的智能化管理。
结论雷达物位计是一种基于雷达技术的物料位测量设备,其原理简单而可靠。
ULM系列雷达全新物位解决方案
ULMCFG 配置包
ULMCFG软件包是配置和调式ULМ系列物位传感器简单 而可靠的强大工具包。软件包通过标准的RS-485工业接口与 传感器互联,可保证在远离仪器装设地点情况下进行配置和 调试---无需到现场。 ULMCFG软件包接口简单,可避免容器物位传感器装置 时操作错误,维护人员可独立完成仪器所有必要调试,保证 其正常工作。 软件包中有一个诊断块可向使用者提供完整的仪器工作信 息,仪器内部检测系统读数以及有无内嵌设备的信息。 传感器内软件不断升级。有一串口模块可使使用者不用从
雷达物位计的特点和使用要点 雷达物位计工作原理

雷达物位计的特点和使用要点雷达物位计工作原理精威自动化——专注于研发制造稳定、安全、耐用的过程掌控仪表!目前在很多行业,使用物料进行生产操作的过程当中,需要通过确定的检测仪表来做特别的测量,这样才能更好精准的计量相关数据,同时也会对生产过程带来确定的效益,提高它的生产效率。
实在来说,雷达物位计的特点和使用要点包括以下几个方面。
点:对环境要求不高,使用便利通常情况下雷达物位计性能特别的稳定,因此雷达物位计厂家介绍在使用的时候,不管接触任何的环境或者介质,基本上都不会产生腐蚀,同时也不太会受泡沫以及大气当中的水蒸气和压力变化的影响。
同时雷达物位计还能够用在严重粉尘环境当中,并且能够正常的发挥效用,而且再加上它的体积比较小,所以使用起来很便利,不会产生磨损或污染之类的情况第二点:要依据被测介质类型以及范围来进行设置在使用雷达物位计进行这两之前应当要对目标物体进行确定的了解,包括所测量的范围是几米以及要求盲区是多少,还有被测介质类型等等。
雷达物位计厂家介绍由于依据不同的情况所测量的方式会有所差别,只有实在的进行对待,才能够获得好的测量结果。
第三点:功能强大由于雷达物位计波长比较短,也由于这样的特点,所以它对请携带固体会产生比较好的反噬效果,再加上波速角度小,因此能够获得特别集中的能量,从而使整个波束强化不简单受到其他的因素干扰。
并且雷达物位计厂家强调其还拥有特别小的测量盲区,因此能够适用在不同的情况和要求下使用,而且可以发挥特别优越的性能。
以上就是雷达物位计的特点和使用要点所包括的几个方面,此外使用的时候,还应当要对戒指的性质有所了解,尤其是对于有腐蚀性的介质应当要放在有防腐效果的罐子内。
而且雷达物位计生产商介绍在进行测量的时候应当要精准的供应正确的电压和电流条件,以便仪器能够正常的使用。
雷达物位计到底有什么优点?目前雷达物位计的使用比较广,其类型也有多种。
假如依照工作方式划分,可以把雷达物位计分为两种类型,一种是非接触的物位计,还有一种是接触式的物位计。
智能雷达物位计详细技术参数
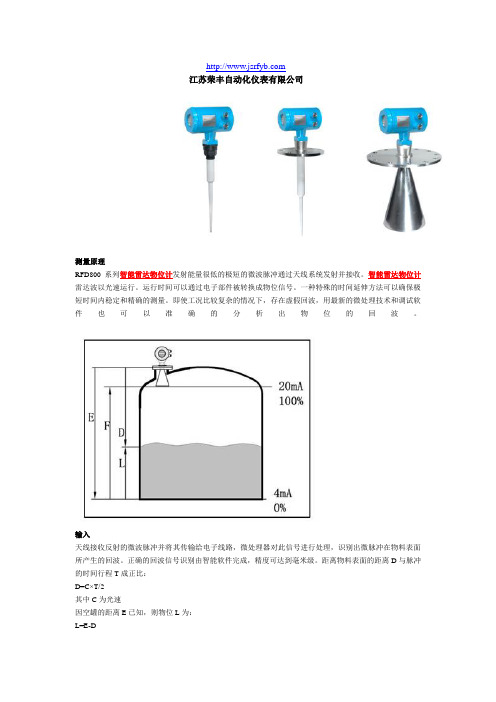
江苏荣丰自动化仪表有限公司测量原理RFD800系列智能雷达物位计发射能量很低的极短的微波脉冲通过天线系统发射并接收。
智能雷达物位计雷达波以光速运行。
运行时间可以通过电子部件被转换成物位信号。
一种特殊的时间延伸方法可以确保极短时间内稳定和精确的测量。
即使工况比较复杂的情况下,存在虚假回波,用最新的微处理技术和调试软件也可以准确的分析出物位的回波。
输入天线接收反射的微波脉冲并将其传输给电子线路,微处理器对此信号进行处理,识别出微脉冲在物料表面所产生的回波。
正确的回波信号识别由智能软件完成,精度可达到毫米级。
距离物料表面的距离D与脉冲的时间行程T成正比:D=C×T/2其中C为光速因空罐的距离E已知,则物位L为:L=E-D输出通过输入空罐高度E(=零点),满罐高度F(=满量程)及一些应用参数来设定,应用参数将自动使仪表适应测量环境。
对应于4-20mA输出。
产品简介:安装指南安装说明1.推荐距离(1)墙至安装短管的外壁:2.离罐壁为罐直径1/6处,最小距离为200mm。
3.不能安装在入料口的上方(4)。
4.不能安装在中心位置(3),如果安装在中央,会产生多重虚假回波,干扰回波会导致信号丢失。
5.如果不能保持仪表与罐壁的距离,罐壁上的介质会黏附造成虚假回波,在调试仪表的时候应该进行虚假回波存储。
罐内安装1.在信号波束内,应避免有如下安装物(1):例如限位开关,温度传感器等。
2.对称装置(2),如真空环,加热线圈,挡板等等。
3.如果罐内有(1)(2)干涉物件,应采用导波管进行测量。
最佳安装选择1.天线尺寸:天线越大,波束角越小,干扰回波将越弱。
2.天线调整:将天线调整到最佳测量位置。
3.导波管:导波管用来避免干扰回波。
罐内安装(RFD801、RFD802)标准安装1.雷达天线不可向罐壁倾斜。
2.为了使温度影响最小化,在对接法兰的连接处必须使用弹簧垫圈。
3.杆式天线必须伸出安装短管。
4.垂直放置杆式天线,不要让雷达束指向罐壁。
雷达——创新性的物位测量技术方案

,
t
ho d
) 把 测 量 时间扩 展 到 儿s 级
。
,
从而
了
一
段
。
这 说 明 其抗 干 扰 能 力高 从 图 4
。
,
成 功 解 决 了 此 问题
C
.
如图 3 所示
,
频 率 混 合器 把 蓝 色 回
,
中还 可 以 看 出
6 G Hz
2 6 G Hz
一
的脉 冲宽度是
采样方 法
的微 波 以脉 冲 ( 微 波 包 裹 )
间的 差 值 来 获得
。
(1
): ㈩
等等
,
把 发 射 与 接收 频率进 行混 频 处 理
后 将形 成
,
一
个 中频 段 的信 号 而 该 中频
,
由 ( 1 ) 可 知 介质 的介 电常数 £ 越 高
r
信 号 频 率正 好 与被测 距 离 呈 正 比例 关 系
即被 测 距 离越 大
,
。
则反 射度 R 越 高
,
” ”
波 脉 冲 与绿 色 参考脉 ; 相 乘 中 处 理 后 形 成 红 色 曲线 射脉 冲 形 状 完全 相 同
频4 3
.
经过混频
脉 冲宽 度 的
,
半 因此 其 回 波 更 加
,
6 G Hz
。
该 红 色 曲线 与 发 其 频率 变成 了 中
C
各种气
图
4 TOF
,
也 就 是 说 每 秒 钟 发 射 和 接收
。
体 介质 中微 波 的 传送 速度
速c
o
与 真 空 中光
雷达开创物位测量新纪元

JVR-G151
JVR-G152
液体及固体测量,适 用于小介电常数介质
液体测量,高温(400℃) 高压(400MPa)工艺 液体测量,高温工艺 液体及固体测量 强腐蚀性液体介质
(200℃)
+防凝结头
低介电常数液体测量
上海凡宜雷达物位产品介绍 雷达物位计特殊结构产品
标准型号:
脉冲雷达: 温度范围:-40℃~200℃; 压强范围:-0.1MPa~4MPa(40Mpa); 导波雷达: 温度范围:-40℃~400℃; 压强范围:真空 ~40MPa;
雷达物位计技术特点
(4)雷达物位计使用敏感参量
安装空间:容器形状、大小,拱形; 安装位置、接管尺寸; 罐内障碍物等;
待测物料性质:液体、固体; 介电常数; 温度、压力; 蒸气、泡沫、波动、搅拌、旋涡等; 粘稠、结砣、挂壁; 粉末、颗粒大小、鼓风等; 进料口、料流方向;
防爆要求、电源提供等;
雷达物位计技术特点
(2)HART通讯调试连接;
(3)HART多点模式
雷达物位计安装使用说明
调试要点说明 中文菜单/点阵LCD (1)调试模块
ENT键 — 进入编程状态 — 确认编程项 — 确认参数修改 键 — 选择编程项 — 选择编辑参数位 — 参数项内容显示 键 — 修改参数值 ESC键 — 退出编程状态 — 退至上一级菜单 — 运行时,显示回波波形
W=2*tan(ф/2)*X
雷达物位计安装使用说明
(3)其它
液体不可倾斜安装 避开料流
雷达物位计安装使用说明
(4)导波管安装
应用:
提高测量精度; 泡沫严重; 液体介电常数非 常小, 如LPG,εr〈1.5;
波动大; 球形(或拱形)罐,正中 心安装避免多次反射; 去掉盲区; 注意:
雷达物位计测量案例

雷达物位计测量案例就说有个大工厂,里面有个巨大的储油罐,这个储油罐啊,就像一个超级大胖子,整天在那等着被装满或者把油输送出去。
可是这厂子里的人之前可愁坏了,为啥呢?因为他们一直搞不清楚这个油罐里到底还有多少油。
他们一开始用的是那种老式的测量方法,什么人工拿个尺子去量啊之类的,这可麻烦死了。
你想啊,油罐那么高,还得爬上去,又危险又不准确。
而且每次测量就跟猜谜语似的,这误差大得就像天上的风筝断了线,到处飘。
后来啊,他们就引进了雷达物位计。
这个雷达物位计就像是一个超级侦探,被安装在油罐的顶部。
它的任务呢,就是要准确地找出油面到底在油罐的哪个位置。
刚安装好的时候,大家都半信半疑的。
这个小小的东西,真的能行吗?结果啊,这家伙一上场就像开了挂一样。
它发射出雷达波,这个雷达波就像一个个小信使,快速地冲向油面,然后又反射回来。
雷达物位计就根据这个来回的时间,轻松算出了油面的高度。
有一次,这个工厂要往油罐里加一大批油。
在加油的过程中,大家就盯着雷达物位计的显示屏看,就像在看一场精彩的球赛似的。
随着油不断地流进油罐,显示屏上的数字就像计分牌一样,稳稳地上升。
油加得满满的,和预定的量几乎是一模一样,误差小得就像一颗芝麻粒。
还有个好玩的事儿呢。
这个工厂旁边有个小仓库,里面放着各种各样的粉末状原料,比如说像面粉一样的东西。
这个小仓库之前也是测量混乱,每次拿原料的时候都像是在摸黑找东西。
后来也给装上了雷达物位计。
这雷达物位计在这个小仓库里也没掉链子。
那些粉末就像调皮的小娃娃,在仓库里挤来挤去的。
但是雷达物位计可不管这些,它的雷达波轻松穿过这些粉末之间的小缝隙,准确地测量出粉末的高度。
有一回,仓库管理员以为原料不多了,正准备进货呢,一看雷达物位计的测量结果,发现还有不少,这下可避免了一次不必要的采购,省了一大笔钱呢。
所以啊,这个雷达物位计在这个大工厂里就像是一个得力的小助手,不管是面对油这样的液体,还是粉末这样的固体,都能把物位测量得准准的,让整个工厂的生产和管理都变得井井有条,再也不用像以前那样瞎猜乱摸啦。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雷达——创新性的物位测量技术方案张伟 袁梦琦张伟先生,上海恩德斯豪斯自动化设备有限公司分析仪表技术工程师;袁梦琦先生,服务总监。
关键词:雷达 EOP 算法 TOF 原理一 雷达(RADAR)简介1. 雷达系统组成雷达是一种通过微波测量物体位置或者物体移动状态的测量方法。
整套雷达系统包含:带天线的发射器、微波传送通道、微波反射面、带天线的接收器。
通常在物位测量中,发射和接收天线是相同的。
2. 微波的反射机理a.被测介质的介电常数决定反射度微波频率在GHz 数量级上,属于电磁波,其反射机理是波阻的变化。
反射度R 是反射能量与发射能量之间的比值,与介质的介电常数εr 有关,反射度计算公式如式(1): ()()2211+−=r r R εε (1)由(1)可知,介质的介电常数εr 越高则反射度R 越高。
b.传送介质的种类、压力、温度对微波传送的影响微波测量的优点是它的传送不需要任何传送介质,其在各种介质中的传送速率可以通过式(2)算出:r r C C με⋅=0(2)式中,C 0指真空中的光速。
各种气体介质中微波的传送速度C 与真空中光速C 0几乎一样,而且受压力或温度变化的影响很小。
二 雷达测距技术雷达测距是根据TOF(Time of Flight)原理,整个TOF 测量过程分5个步骤:发射微波脉冲 、脉冲在被测介质表面反射、接收反射回来的脉冲、计算传感器与反射面之间的距离D=c·t/2、计算物位L=E-D(如图1所示),其中L-物位,E-空标,D-测量距离,F-满标,t-脉冲运行时间,c-脉冲运行速度,BD-盲区距离,SD-安全距离。
目前市场上利用微波进行物位测量,主要使用的是两种微波测量技术,一种是FMCW(Frequency Modulated Continuous Wave)方法,另一种是脉冲(pulse)方法。
不管是FMCW方法还是脉冲(pulse)方法,它们都可以在量程范围内保证mm级的精度要求。
1. 信号处理方法a.FMCW方法Krohne、Saab、Rose-mount等公司使用FMCW方法。
该方法使用线性调频的射频(RF)信号(如:发射器发出的频率周期性地在9.5~10.5GHz之间变化)。
当介质表面反射回来的信号到达接收器时,发射器中的发射频率也同时发生了变化。
微波运行的时间可通过计算接收到的信号频率与当前发射频率之间的差值来获得。
把发射与接收频率进行混频处理后,将形成一个中频段的信号,而该中频信号频率正好与被测距离呈正比例关系。
即被测距离越大,则发射与接收频率差值越大,混频后的中频段信号频率越大。
b.脉冲方法E+H与Vega公司使用的是脉冲方法。
这里所说的脉冲指的是一组有许多微波组成的“微波包裹”。
E+H使用的脉冲持续时间约为0.8ns,脉冲的重复频率为3.6MHz,也就是说每秒钟发射和接收3.6百万个脉冲。
脉冲的运行时间t是相当短的。
如果要达到1mm的物位测量分辨率(resolu-tion),则测量时间为6ps。
可以想像,测量如此小的一个时间技术上是相当困难的,这也是很多人攻击脉冲法的一点。
E+H公司通过独特的采样方法(sampling method)把测量时间扩展到μs级,从而成功解决了此问题。
c.采样方法6GHz的微波以脉冲(“微波包裹”)的形式发出,发射脉冲的重复频率为3.6MHz,也就是说每278ns发射一个脉冲。
反射回来的回波脉冲(如图2中第二条曲线)随后将与一个参考脉冲(如图2中第一条曲线)进入频率混合器进行信号处理。
该参考脉冲与发射脉冲形状相同,只是它的重复频率要比3.6MHz小43.7Hz,即该参考脉冲在时间轴上推移了一段。
如图3所示,频率混合器把蓝色回波脉冲与绿色参考脉冲相乘,经过混频处理后形成红色曲线。
该红色曲线与发射脉冲形状完全相同,其频率变成了中频43.7Hz(周期23ms)。
也就是说经过混合处理器处理后的红色曲线把回波脉冲在时间轴上扩展了82380倍。
只要测出红色曲线上发射脉冲与回波脉冲的时间间隔t1(ms),则t=t1/82380。
这样便实现了极短脉冲运行时间t的测量。
E+H公司使用的是6GHz和26GHz的微波。
这两个频率各有优缺点,6GHz微波脉冲的优点是不易受到挂料黏附、冷凝、液面湍流、泡沫等的影响;缺点是天线尺寸大。
26GHz 微波脉冲的优点是精度高,发射角小,尤其适用于小罐中;缺点是抗干扰弱。
图4为锥形罐液位测量工况下6GHz与26GHz回波信号的比较。
蓝色6GHz回波信号中的杂波干扰明显少于红色26GHz,这说明其抗干扰能力高。
从图4中还可以看出,26GHz 的脉冲宽度是6GHz脉冲宽度的一半,因此其回波更加尖锐显著,测量精度更高(±3mm)。
2. 雷达仪表结构一台雷达物位测量仪表主要包含天线、高频模块、A/D转换器和微处理器以及输出模块。
其中,高频模块负责发射和接收高频微波信号,A/D转换器和微处理器负责完成“脉冲”信号处理方法。
输出模块负责测量值本地显示。
三雷达仪表产品E+H的雷达物位测量产品分为接触式和非接触式两大类。
1. 非接触式雷达对特定工况条件下(压力、温度)的液体和挥发性的(也包括腐蚀性的)介质进行测量时,这种非接触雷达测量是最合适的测量方法。
这一测量原理的进一步研发使得这种测量技术也可以用于对散装物料的测量,而且还不受散装物料中灰尘和充填时粉尘的影响。
E+H公司的众多Micropilot型非接触式雷达的主要区别是天线种类不同或微波发射频率不同。
前面已详细论述了6GHz和26GHz微波各自的优缺点,下面将着重介绍两种天线及其作用。
a.喇叭天线雷达仪表的天线主要起到3个作用:阻抗匹配(Impedance matching),“光圈”作用(Aperture),汇聚作用(Focusing)。
(1)阻抗匹配对于微波反射来说,在每个阻抗变化的地方都会产生部分微波能量的反射。
为了发射出尽可能多的能量,各射频(RF)组成部件的阻抗都应互相匹配。
这包括高频模块与高频模块电缆的阻抗匹配,天线与微波传送介质的阻抗匹配等。
(2)“光圈”作用天线的喇叭越大,则“光圈”越大,天线所能接受到的来自被测介质表面的反射信号越强。
(3)汇聚作用正如光线会在微小圆孔处发生衍射现象,微波也会在喇叭处发生衍射现象,而且衍射角度随着天线尺寸的减小而增大。
也就是说对大尺寸天线来说,衍射效果弱,微波汇聚效果更好,波束角(beam angle)更窄。
从以上阻抗匹配、“光圈”作用、汇聚作用3个方面分析,可以得出如下结论:“天线尺寸越大,系统性能越好。
”b.杆式天线杆式天线的杆子形状是圆锥形的,其微波的能量分布与DN100的喇叭天线能量分布情况相似。
杆式天线的优点是其材料为PTFE,适用于强烈化学腐蚀的场合。
2. 接触式雷达-导波雷达所谓导波雷达是指微波沿着一根导波缆或者导波杆传送,接触到被测界面后沿着该缆或该杆反射回来。
利用导波雷达物位测量仪表既可对散装物料(缆式探头)也可对液体(杆式和同轴探头)进行测量。
通过可靠的雷达波导向使得被测介质表面质量成为影响测量精度的次要因素了。
尽管装料口的型式、形状不同,但它们都不影响测量精度。
即使是湍流液体表面,或者有泡沫的液体表面也不会影响测量的精度。
导波雷达的优点是其不受被测容器内部温度、压力、密度变化的影响,而且粉尘、泡沫、湍流液面对其影响也很小。
缺点是导波缆上的挂料尤其是不规则的挂料将削弱微波强度,改变微波传送速度,或者产生虚假的回波信号,这些都将导致错误的物位信号。
因此如果采用缆式导波雷达测量粉料物位,要防止湿气进入料仓,避免粉料受潮后在导波缆上挂料。
四先进的PlusMaster eXact应用软件E+H雷达仪表在数据处理方面有着先进的技术。
非接触式雷达的“首次回波因子”(First Echo Factor,FEF)功能,避免了仪表把多次反射回波误认为物位信号,导波雷达的EOP(End of probe)算法使仪表可以在回波信号很弱无法被探测到的情况下,仍然可以通过EOP信号算出物位信号,不失波。
1. 首次回波因子对于应用于某些几何尺寸罐体的非接触式雷达来说,很可能出现多次反射的回波信号,其信噪比(S/N) 要大于真实物位的回波。
首次回波因子功能避免了仪表把多次反射回波误认为物位信号。
首次回波因子定义了最大回波向下的一个带宽,算法将搜索在这个带宽范围内的第一个峰值,并认定该峰值回波为被测物位反射回来的信号。
图5为一例回波曲线,该曲线上有两个回波且第二个回波要比第一个回波幅值大。
由于第一个回波在带宽以内,所以仪表认定其为物位信号。
第二个回波是由于多次反射引起的。
首次回波因子又分为以下两种。
a.动态首次回波因子动态首次回波因子是指首次回波因子的大小与最大回波的幅值有关。
最大回波的幅值越大则带宽越大,首次回波搜索范围越大,如图6右侧所示;最大回波幅值越小,则带宽越小,首次回波搜索范围越小,如图6左侧所示。
动态回波因子的优点是防止回波信号过小时,干扰信号进入到带宽中;同时保证回波信号较大时,能够找到有效的首次回波。
b.静态首次回波因子静态首次回波因子是指带宽一定,即首次回波因子为常数。
2. EOP算法对于导波雷达来说,当被测介质液面很低时(尤其是对于低介电常数的介质),回波信号很弱无法被探测到,如果没有EOP算法仪表将会产生失波报警。
EOP算法所带来的独特优势是:即使回波信号很弱无法被探测到,仪表仍然可以通过EOP 信号计算出物位信号。
a.EOP_shift仪表检测到缆末端EOP 信号,根据TOF 原理计算出缆长(缆长L=空气中微波速度C 0×t/2)。
该缆长与真实缆长之间有一定的差值,用EOP_shift 表示。
造成EOP_shift 的原因是:微波在空气中的传播速度与在液体介质中的传播速度不同,而EOP 信号是微波经过空气→被测介质→空气后,反射回天线的。
所以,用空气中微波速度C 0计算缆长,将导致所测缆长大于真实缆长,产生EOP_shift 。
EOP_shift 的含义详见图7。
b.计算原理EOP_shift 与物位(Level)存在一定的关系,如式(3)所示。
EOP_slope LevelEOP_shift = ε=(EOP_slope+1)2 (3) 式中ε指被测介质的介电常数。
c.具体计算过程如果同时检测到物位信号(Level)与EOP 信号,则根据检测到的EOP_shift 与Level 计算出此时的EOP_slope ,而且这一过程是自动重复进行的。
如果失波,则仪表将根据当时检测到的EOP_shift 和上次计算出来的EOP_ slope ,通过式(3)计算出物位信号(Level)。
除了以上两个信号处理方面的亮点以外,E+H 雷达物位仪表还具有“用户干扰抑制”(Customer mapping)功能。