在线检测实时图像处理系统的设计与实现_
基于 DirectShow 和 WPF 的实时视频图像采集与处理系统设计与实现
基于 DirectShow 和 WPF 的实时视频图像采集与处理系统设计与实现武凤翔【期刊名称】《计算机应用与软件》【年(卷),期】2015(000)003【摘要】Currently,the main problems of video image are the low execution efficiency and difficult to realise real-time performance when processing large amounts of data.In light of this,we use DirectShow technology to well solve the problems.The video data in RAM can be directly processed based on DirectShow so that the bottleneck of hard disk data reading is stepped across.In this paper we design the real-time video image acquisition system,which uses DirectShow and WPF as the software platform,and includes video image capture and display module,image browsing and processing module,and image storage and management module.Experimental results show that the method can achieve good effect when applying in real-time video image acquisition,and is feasible in engineering application.%当前视频图像的主要问题是当处理的数据量大时,执行效率低,很难实现实时性。
火灾实时图像监测系统的设计与实现
火灾实时图像监测系统的设计与实现第一章简介火灾是一种常见的重大火灾安全隐患,严重影响人们的财产和生命安全。
如何尽早发现和扑灭火灾,是当今社会所面临的一个重要问题。
随着技术的不断发展,火灾实时图像监测系统已经成为一种非常有效的火灾监控手段,因其及时准确地获取火灾信息,得到了广泛的应用。
本章主要介绍火灾实时图像监测系统的设计意义和应用价值。
第二章设计思路针对目前火灾监测中存在的问题,本系统采用了图像监测技术,即通过安装摄像头,获取火灾现场的图像信息,结合算法对图像进行分析,识别火灾的特征,如火焰、烟雾等,进而进行预警。
本系统的设计思路如下:(1)图像采集。
通过摄像头对火灾现场进行图像获取,获取到的图像将作为后续算法分析的数据源。
(2)图像处理。
对采集到的图像进行分析,去除噪声和无关信息,从而准确地识别出火焰、烟雾等特征。
(3)特征识别。
通过算法对处理后的图像进行特征识别,并判断是否存在火焰、烟雾等危险特征。
(4)报警预警。
当火灾监测系统检测到危险特征时,将立即发出预警,通知相关人员进行处理。
同时,系统还可以自动触发灭火设备,进行扑灭。
第三章系统实现根据以上的设计流程,本系统主要分为图像采集、图像处理、特征识别和报警预警四个模块。
(1)图像采集。
本系统采用高清摄像头作为图像采集的设备,摄像头可以实时对火灾现场进行拍摄,并通过传输数据将图像传输到服务器端进行处理。
(2)图像处理。
针对图像中的噪声和无关信息,本系统采用了图像增强、滤波和边缘检测等技术,去除干扰信息,从而提高火灾识别率。
(3)特征识别。
本系统采用了基于机器学习和深度学习的火灾特征识别算法。
算法通过对图像的学习和分析,可以识别出火焰、烟雾等危险特征,并给出相应的预警信号。
(4)报警预警。
当系统检测到火灾现场出现危险特征时,将立即发出预警信号,同时触发灭火设备,进行扑灭操作。
此外,系统还可以通过手机短信、电子邮件等方式进行远程报警,方便管理员及时掌握火情。
基于MATLAB GUI图像处理系统的设计与实现

基于MATLAB GUI图像处理系统的设计与实现本文将介绍一个基于MATLAB GUI的图像处理系统的设计和实现。
该系统提供了一系列常用的图像处理功能,包括图像滤波、边缘检测、图像变换、形态学处理、颜色空间转换等。
通过该系统,用户可以方便地对图像进行处理和分析。
首先,需要创建一个MATLAB GUI窗口,用于显示图像和进行图像处理。
接着,通过调用MATLAB内置的图像处理函数来实现各种功能。
下面是一些常用功能的实现方法:1.图像读取:使用imread函数来读取图像文件,并在GUI窗口中显示。
2.图像滤波:使用imfilter函数来实现各种滤波器,如高斯滤波、中值滤波等。
3.边缘检测:使用边缘检测算法(如Sobel算子、Canny算法等)来提取图像中的边缘信息。
4.图像变换:使用imresize函数来改变图像的大小,使用imrotate函数来旋转图像等。
5.形态学处理:使用imopen、imclose等形态学处理函数来对图像进行形态学分析和处理。
6.颜色空间转换:使用rgb2gray、rgb2hsv等函数来进行颜色空间的转换。
在实现这些功能时,可以使用MATLAB的图像处理工具箱中的函数,也可以自己编写函数来实现特定的处理功能。
除了提供以上的基本功能,该系统还可以通过添加菜单栏、工具栏等交互元素,以增强用户体验。
例如,添加一个“保存”菜单项,使用户可以将处理后的图像保存到本地,或添加一个“撤销”按钮,使用户可以取消上一次的处理操作等。
总之,通过将MATLAB GUI和图像处理技术相结合,我们可以很方便地开发出一个图像处理系统,并提供常用的功能和交互元素,使用户可以快速地对图像进行处理和分析。
同时,我们也可以根据实际需要,自行扩展和改进该系统,以适应更加复杂的图像处理应用场景。
基于FPGA+DSP的实时图像处理系统设计与实现
万方数据万方数据·110·微处理机2010年(DPRAM)。
虽然C6416片内集成了高达8M位的片内高速缓存,但考虑到图像处理算法必涉及到对前后几帧图像进行处理,为保证系统运行时存储容量不会成为整个系统的性能瓶颈(chokepoint),在DSP模块中额外扩展存储空间。
由于EMIFA口的数据宽度更大,因此系统在EMIFA的CEl空间内扩展了两片总共128M位的同步存储器。
C6416的引导方式有三种,分别是:不加载,CPU直接开始执行地址0处的存储器中的指令;ROM加载,位于EMIFBCEl空间的ROM中的程序首选通过EDMA被搬人地址O处,ROM加载只支持8位的ROM加载;主机加载,外部主机通过主机接口初始化CPU的存储空间,包括片内配置寄存器。
本系统采用的是ROM加载方式。
C6416片内有三个多通道缓冲串口,经DSP处理的最终结果将通过DSP的多通道缓冲串口传送至FPGA。
3.4图像输出模块该模块的功能是将DSP处理后的图像数据进行数模转换,并与字符信号合成后形成VGA格式的视频信号。
这里选用的数模转换芯片为ADV7125。
这是ADI公司生产的一款三通道(每通道8位)视频数模转换器,其最大数据吞吐率330MSPS,输出信图2原始图像图3FPGA图像增强结果5结论实时图像处理系统以DSP和FPGA为基本结构,并在此结构的基础上进行了优化,增加了视频输入通路。
同时所有的数据交换都通过了FPGA,后期的调试过程证明这样做使得调试非常方便,既可以监视数据的交换又方便修正前期设计的错误。
整个系统结构简单,各个模块功能清晰明了。
经后期大量的系统仿真验证:系统稳定性高,处理速度快,能满足设计要求。
号兼容RS一343A/RS一170。
由FPGA产生的数字视频信号分别进入到ADV7125的三个数据通道,经数模转换后输出模拟视频信号并与原来的同步信号、消隐信号叠加后便可以在显示器上显示处理的结果了。
大亚湾石化区污水排海管线自动控制及在线监测系统的设计与实现
设计与制造Design and manufacture0 引言大亚湾石化区排污管道位于大亚湾东侧海域,下海点位于清源污水处理厂附近,主体工程包含一条长约37.8km 的海底管线和长约154m 的管道终端连接扩散器、两条陆地管线、一座排海泵站及配套设施。
排海泵站设计流量为3800m3/h,装设有4台卧式单级双吸中开离心泵,其中3台为排海泵,1台为回流泵,工程规模为中型。
泵站厂区内布置污水缓冲池、泵房、站内进、出水管道及附属阀件设备、运营管理中心大楼等,中控室设在运营管理中心大楼一层。
1 系统总体设计方案本系统涵盖计算机监控、水质在线监测、安防视频等多个专业。
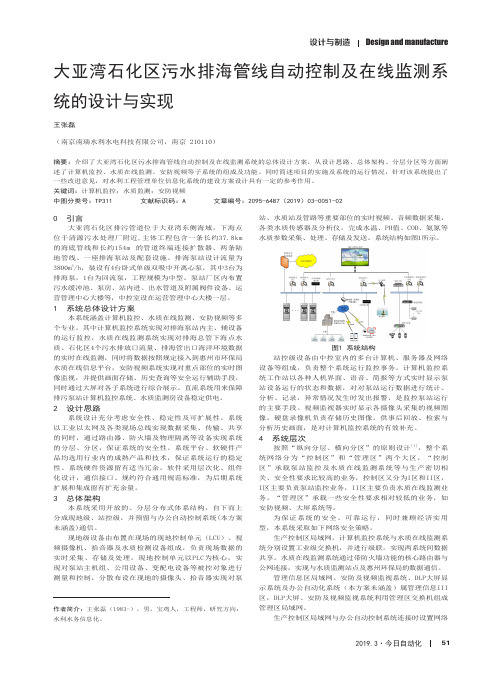
其中计算机监控系统实现对排海泵站内主、辅设备的运行监控,水质在线监测系统实现对排海总管下海点水质、石化区4个污水排放口流量、排海管出口海洋环境数据的实时在线监测,同时将数据按照规定接入到惠州市环保局水质在线信息平台,安防视频系统实现对重点部位的实时图像监视,并提供画面存储、历史查询等安全运行辅助手段,同时通过大屏对各子系统进行综合展示。
直流系统用来保障排污泵站计算机监控系统、水质监测房设备稳定供电。
2 设计思路系统设计充分考虑安全性、稳定性及可扩展性。
系统以工业以太网及各类现场总线实现数据采集、传输、共享的同时,通过路由器、防火墙及物理隔离等设备实现系统的分层、分区,保证系统的安全性。
系统平台、软硬件产品均选用行业内的成熟产品和技术,保证系统运行的稳定性。
系统硬件资源留有适当冗余,软件采用层次化、组件化设计,通信接口、规约符合通用规范标准,为后期系统扩展和集成留有扩充余量。
3 总体架构本系统采用开放的、分层分布式体系结构,自下而上分成现地级、站控级,并预留与办公自动控制系统(本方案未涵盖)通信。
现地级设备由布置在现场的现地控制单元(LCU)、视频摄像机、拾音器及水质检测设备组成,负责现场数据的实时采集、存储及处理。
现地控制单元以PLC为核心,实现对泵站主机组、公用设备、变配电设备等被控对象进行测量和控制,分散布设在现地的摄像头、拾音器实现对泵站、水质站及管路等重要部位的实时视频、音频数据采集,各类水质传感器及分析仪,完成水温、PH值、COD、氨氮等水质参数采集、处理、存储及发送。
实时视频信号采集与处理系统设计与实现

( eat etfE 加, ad I om t nTcn u ,I ,ab 50 1 C i D p r n o c l n fr ai eh i eH TH ri 10 0 , hn m n o q n a)
20 07拄
3 硬 件 设 计
整个 电路 由三 个 部分 组 成 : 频 信 号 的采 集 和 视 恢 复 , 于数字 视频 信 号 的控 制 和使 用 大 型 可 编程 对 逻辑 器件 F G P A进行 数据处 理 。
3 1 视频信 号 的采集 .
高 的重用性 。 3 3 使用 F G . P A进行 复杂 的 图像处 理
摘 要 : 绍采 用视 频编 解 码器 实现视 频信号 的采 集 , 用 At a公 司 的 E L 介 使 lr e P D和 S A 实现 RM
视频图像 的存储和 回放功能, 最后介绍使用 F G P A和 S A R M完成 系统扩展 , 搭建 了一套完整的图像 采 集和处 理平 台。 关键词 : 视频编解码 ; 微处理机 ; 现场可编程门阵列(P A FG ) 中图分 类号 :P 30 2 文献标 识码 : T S6 . 1 B 文章编 号 :02—27 (07 0 09 10 29 20 )3— 05—0 4
维普资讯
第 3期 20 0 7年 6月
微
Байду номын сангаас
处
理
机
No 3 .
MI CROP ROCES OR S S
Jn 2 0 u .,0 7
实 时视 频 信 号 采集 与处 理 系 统 设 计 与 实 现
李一鹏 , 张晓峰 , 张 晔
基于图像处理的自动识别系统设计与实现
基于图像处理的自动识别系统设计与实现摘要:自动识别系统是现代信息技术领域的重要研究方向之一,它基于图像处理技术实现对图像、视频中的目标进行快速准确的识别和分类。
本文将介绍一种基于图像处理的自动识别系统的设计与实现,包括图像获取、预处理、特征提取和目标识别等几个关键步骤,以及系统的整体架构和算法优化方法。
通过实验验证,该系统在目标识别的准确率和效率方面取得了显著的改善,具有较好的应用前景。
1. 引言自动识别系统是一种能够自动从图像或视频中提取出目标对象并进行准确识别的技术,广泛应用于安防监控、智能交通、人脸识别等领域。
图像处理技术是自动识别系统实现的基础,通过对图像进行预处理、特征提取和目标识别等步骤,可以高效地实现自动目标识别。
本文将介绍一种基于图像处理的自动识别系统的设计与实现,以期提供一种解决方案,用于改善目标识别的准确率和效率。
2. 系统设计与实现2.1 图像获取在自动识别系统中,图像获取是第一步,决定了后续处理的质量。
可以使用摄像机、监控设备或其他传感器获取图像或视频流,并传输到图像处理模块进行处理。
为了提高系统的适应性,本文采用了基于网络的图像获取方式,可通过局域网或互联网连接远程设备,并获取实时图像。
2.2 预处理预处理是自动识别系统中的关键步骤之一,旨在对获取到的图像进行去噪、增强和调整等处理,为后续的特征提取和目标识别提供更好的图像质量。
预处理的常用方法包括灰度化、平滑滤波、对比度增强和直方图均衡化等。
其中,平滑滤波可以减少图像中的噪声干扰,对比度增强能够提高图像的清晰度和辨识度。
2.3 特征提取特征提取是自动识别系统中的核心步骤,通过分析图像中的特征信息,提取出具有代表性的特征描述符,用于目标的类别判别。
常用的特征提取方法有颜色特征、纹理特征和形状特征等。
其中,颜色特征可通过对图像进行颜色空间转换,提取出颜色直方图或颜色矩等;纹理特征可通过对图像进行纹理分析,提取出纹理统计量等;形状特征可通过对图像进行边缘检测、细化和轮廓提取等,获取目标的形状信息。
高帧频图像采集处理系统的设计与实现
转换 芯 片把 L D V S形式 的 图像 信 号转 换 为 1 L形 T r
式 的图像信号并存储 到 F G 的相关存储器里 , PA 由 FG P A控制数字 图像 的采集 , 进行滤 波去噪等
灵敏度的要求 , 从提高输入图像 的帧频考虑 , 前端
作者简介 : 郭炳(92 ) 男, 18一 , 工程师, 毕业于西安电子科技 大学, 研究方向: 图像跟踪处理 、 高分辨率的数字相机应用等。
采用 了一 款 基 于 CmeaLn a r ik接 口的 B B A O C T系
1 引 言
随着 机器 视觉 技术 的不 断发 展 和 光 电探 测 领
列高 帧频 数字摄 像 机 , 相 机 的 帧频 为 10H , 该 0 z分 辨率 为 60× 8 , 样 帧处 理 时 问就 只有 1 s 4 40 这 0m . 考 虑 到 系 统 的实 时 性 , 们 设 计 以高 性 能 的 D P 我 S
的逻辑 编程 灵 活调 配 系统 资源 , 图像 采 集 、 将 图像 处理 、 频格 式 转换 、 视 通信 控 制 、 图像 显 示
等功 能合 理分 配至 各 个硬 件 单元 。 经过 实验验 证 , 系统 处 理 能 力强 , 该 跟踪 精 度 高 , 通信 控
制好 , 个功 能单 元都 达到 了预期 的 效果 。 各 关键词: 高帧频 ; 图像 采 集 ; 图像 处理 ; S F G D P;P A 中图分 类 号 : N 1 . 3 T 9 1 7 文 献标 识码 : A .
f ncin a e p o e l srb t d t a h ha d r i. An e pe me t i d ho ng t tt y tm s u to r r p ry diti u e o e c r wa e unt x r n s ma e s wi ha he s se ha i
基于FPGA的红外图像实时采集系统设计与实现

基于FPGA的红外图像实时采集系统设计与实现摘要:随着红外图像在军事、航天、安防等领域的广泛应用,对红外图像的实时采集和处理需求越来越高。
本文基于FPGA设计并实现了一个红外图像实时采集系统,通过系统硬件框架、图像采集流程设计以及软硬件协同优化等方面的探究,实现了高效、稳定的红外图像实时采集和传输,为相关领域的探究和应用提供了重要支持。
一、引言红外图像技术是一种利用物体发射的红外辐射进行成像分析的技术,具有透过阴郁、烟雾等不利环境的能力。
它在军事、航天、安防等领域具有重要应用价值。
红外图像的实时采集和处理对于这些领域的探究和应用至关重要,然而传统的红外图像采集系统存在采集速度慢、波动大、传输距离限制等问题。
因此,设计并实现一种基于FPGA的红外图像实时采集系统具有重要意义。
二、系统框架设计基于FPGA的红外图像实时采集系统主要由硬件和软件两个部分组成。
硬件部分包括红外探测器、FPGA开发板、存储器、图像传输模块等;软件部分主要包括图像采集控制程序和数据处理程序。
硬件框架设计接受分层结构,分为红外图像采集层、控制层、存储层和传输层四个部分。
红外图像采集层包括红外探测器和模拟-数字转换电路,负责将红外辐射信号转换为数字信号。
控制层包括FPGA芯片和时钟控制电路,负责采集信号的控制和同步。
存储层包括高速存储器和图像缓存,负责暂存采集到的红外图像数据。
传输层包括数据传输电路和网络接口,负责将采集到的图像数据传输到外部设备。
三、图像采集流程设计图像采集流程是指将红外图像转换为数字信号并存储的过程。
在红外图像采集层,红外探测器将红外辐射信号转换为模拟信号,经过模拟-数字转换电路转换成数字信号。
在控制层,FPGA芯片控制采集信号的采样频率和位宽,通过时钟控制电路实现同步。
在存储层,高速存储器负责将采集到的图像数据暂存起来,图像缓存则将暂存的图像数据进行处理和压缩。
在传输层,数据传输电路将处理和压缩后的图像数据传输到外部设备。
自适应实时视频采集处理系统的设计与实现
自适应
摘 要: 出了以T 3 0 6 1 DS 作为视频采集 系统核 心 , 给 MS 2 C 2 1 P 来对P LNT C A \ S
设计与实现
模拟视频 信号进行 自适应采 集 、同步缓存 、实时处理 、任意设 置输 出视频 分
CP LD
收稿 日期 : 0 6 0 — 2 2 0 — 1 1
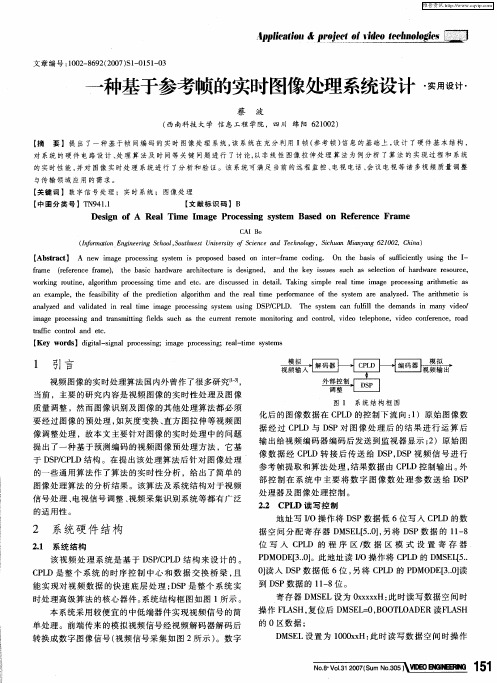
图1
系统总体 结构框 图
5 电手元 嚣 件 主硐 2 0 . 6 0 64 w w ha C .t w . i E Dn Cn e
维普资讯
请求 信 号,输 I接 口依 据应用场 合 D P和视频 解码芯 片 S A l4 叶 I S A 7 lH为 核 频处理芯片 ,具有 6个模拟信号输入
/ 在信息 技术 和计算 机互联 网飞 检测 , 以将其解码 为 数字视 频 ,然 后 接收 且完 成 A D和 格式 转换 ,并送 人 IO N 4 25 速发 展的大背 景下 ,数字 视频 的需 通过软件设置所需的输 出格式与分辨 同步 FF 片S 7 V 1 进行缓冲存
IO 可向T 30 61 申 MS2C2 l 求与 日俱增。视频监控 、视频会议及 率 ,来完成实时的视频采集与处理 。 储。FF 半满时, 请 巾 断 以 请 求 读 人 数 据 由 各类 便携 式 、手持式 P A等 都需要 实 D T 30 6 启动 E M MS2 C 2 1 1 D A以完成数字 本视频采 集处 理 系统 的总体结 视频的转存 ,DS 外 围 S A 和 P DR M 伴 随着海量 数据 的产牛 ,这就 对视 构如图 1 所示。该系统主要由摄像头、 F A H 用来存储对数字视频所做 的 L S 频采 集系统 的处理 能力 、并行速 度 专用视频 AD转换器 S A 14 视频 后期处理的f / A 7 1H、 例如 MP G 4 H. 4 E 一 、 2 压 6 提 了更 高的要求 。而 D P以其高精 S 缓存单元、核心处理器 T 3 0 6 缩) MS 2 C 2 1 l 数据与程序。C L o Sl3E用 PDi LI 2 s O 度 、快速度 、小功耗 、高并行性 、易 单元和 输 接 口构成 。其 中摄 像头 来产生系统 中所需的逻辑控制信号 、 于集 成等优 点很好 的满 足了这一 要 采集的 N S /A T CP L模拟视频信号通过 读写控制信号 、同步信号和 D P中断 S 求 ,同时也越来越 广泛地 应用 于各
工科选题EI(JA)期刊教材
选题可发EI(JA)期刊,下单后研发体育选题:1)数据挖掘在篮球技术动作中的应用分析2)基于动态规划融合多模态的足球视频事件分析3)基于HMM的足球视频语义结构分析4)篮球比赛视频中持球队员行为预测5)基于模糊自调节算法的乒乓球机器人回球速度计算6)图像处理技术在捡球机器人上的研究应用7)基于虚拟现实的健美操训练技术研究8)仿人跆拳道机器人的技术研究9)基于PIC单片机篮球机器人的设计与实现10)基于单片机的篮球计时计分器的设计11)基于单片机控制的乒乓球训练系统的设计交通:12)基于卫星导航定位技术的交通运输信息系统的设计13)基于GIS的交通运输行业环境监测网络信息管理系统研究14)基于Internet/Intranet的交通运输物流信息系统设计15)面向决策支持的交通运输信息平台研究16)在交通运输上使用动态规划求解最短路径17)交通运输管理信息系统的开发与应用电子通信:18)基于ARM的GPRS无线数据传输系统的研究19)基于单片机的火灾自动报警系统的研究20)人工智能与机器人在现代图书馆中的应用体育:21)传感器在人体运动图像检测系统中的应用22)图像识别技术在运动学中的应用探析23)基于模糊数学方法的体育教学评价模型的研究24)基于模糊数学方法的学生体育成绩综合评定25)基于数学模拟竞技诊断方法的球类比赛分析机器人和控制算法:26)高精度超声波测距系统的研究及精度测量27)复杂环境下机器人路径规划及算法研究28)基于视觉的水下机器人定位与地图构建技术研究29)基于神经网络的四旋翼飞行器控制系统的应用及关键技术的研究30)仿人机器人脑电信号特征提取的分析与研究31)基于FPGA的大数据高级算法的设计与实现32)基于模糊算法的机器人路径规划33)微型水陆两栖机器人驱动设计及水动力分析34)基于蛇形的机器人步态算法研究智能控制:35)基于FPGA的图像处理算法研究与实现36)基于粒子滤波技术的图像处理研究37)嵌入式视频监测系统的FPGA图像处理系统设计38)基于ARM和DSP的嵌入式实时图像处理系统设计与实现39)基于多尺度几何变换算法的遥感图像处理研究40)基于胡氏不变距和贝叶斯分类器的边缘检测研究41)基于遗传算法和势场法的机器人路径规划技术研究42)基于粒子群算法使的智能车辆自主避障路径规划研究43)基于改进蚁群算法的双足机器人路径规划研究44)基于改进RRT算法的移动机器人在未知环境下的路径规划45)基于SVM和小波变换的四类脑电信号研究46)在线脑机接口信号的特征提取与分类方法的研究47)基于稳态视觉诱发电位的脑机接口技术的研究48)基于运动想象的脑机接口技术的研究与实现计算机,网络:49)基于CAN总线在软启动器上的应用50)改进遗传算法及其在平面度误差评定中的应用51)基于免疫算法的云计算任务调度策略研究52)基于形变模型的三维人脸快速重建改进算法53)求解三维装箱问题的混合模拟退火算法研究54)模拟退火算法的研究及其应用55)基于支持向量机的聚类及文本分类研究56)基于统计学习理论的支持向量机算法研究57)粗糙集理论及其在神经网络中的应用研究58)基于MATLAB的递推最小二乘法辨识与仿真59)主成分回归和偏最小二乘法在高炉冶炼中的应用60)云数据库服务管理研究与实现61)基于分布式数据库数据处理的研究62)基于Oracle数据库安全策略研究63)基于关系数据库的领域本体构建方法64)延迟容忍传感器网络数据传输研究65)有向传感器网络覆盖增强算法研究66)一种基于TMP的DOS_DDOS的攻击防范方法67)ARP欺骗在网络中的应用与防范68)移动通信网络安全策略研究69)基于SNMP的网络故障监测技术研究70)基于云计算的网络数据安全研究71)基于大数据分析的谣言传播规律与应对策略研究72)基于数据挖掘的投标辅助决策研究73)基于攻防博弈模型的网络安全测评和最优主动防御74)基于mvc模式的web管理信息系统的设计与实现75)基于JSP的网上购物系统的设计与实现76)基于遗传算法的多目标优化问题的应用研究77)基于LDA模型的文本聚类研究78)基于遗传算法的多旅行商问题优化79)人工冻结法在地铁隧道施工中的应用物联网:80)基于物联网分布式楼宇光伏电站监控系统设计81)物联网技术在变配电站监测系统中的应用能源工程:82)城市街区区域供冷供热系统的优化研究。
GB 35114视频监控安全运维管理平台检测工具的设计与实现

检验mH EB35114视频豔控安全运堆管理平台艦测工具伺设汁与宪现■文/公安部检测中心何迪郑征摘要:针对支持GB35114前端设备运维平台测试需求,公安部检测中心开展了评价指标及测试方法研究,成功研制出GB35114视频监控安全运维管理平台检测工具。
本文主要介绍了测试评价指标,并从检测工具系统功能和系统架构两个方面对GB35114视频监控安全运维管理平台检测工具进行了论述。
关键字:GB35114运维平台检测工具4引言2015年出台的《关于加强公共安全视频监控建设联网应用工作的若干意贝》明确规定,到2020年要基本实现“全域覆盖、全网共享、全时可用、全程可控”的公安视频监控建设联网应用。
"全程可控”要求基本建成公共安全视频监控系统联网应用分层安全体系,实现重要视频图像信息不失控和敏感视频图像信息不泄露。
2018年11月1日,GB35114-2017国家强制标准正式实施。
该标准规定了公共安全领域视频监控联网视频信息以及控制信令信息安全保护的技术要求,从技术上实现了重要视频图像的信息安全和数据保护。
"全时可用”对公共区域前端设备的完好率提出了指标性要求。
这就要求建立专门的运维系统,利用视频图像质量检测算法等技术手段对前端设备进行设备及链路监测和视频图像质量检测。
随着GB35114标准的落地,运维系统应支持GB35114前端设备的运维,确保其"全时可用”。
针对支持GB35114前端设备运维平台测试需求,公安部检测中心开展了评价指标及测试方法研究,研制出一套GB35114视频监控安全运维管理平台检测工具(以下 简称GB35114运维平台检测工具)。
本文首先介绍了测试评价指标,然后从检测工具的系统功能和系统架构两方面对GB35114运维平台检测工具进行论述。
2测试评价指标公共安全视频监控领域运维系统国家标准一《公共安全视频图像信息联网应用运维管理平台技术要求》和《公共安全视频图像信息联网应用运维管理平台软件测试规范》,目前正在制订过程中,尚未发布。
基于OpenCV的图像处理与识别系统设计与实现

基于OpenCV的图像处理与识别系统设计与实现一、引言随着计算机视觉技术的不断发展,图像处理与识别系统在各个领域得到了广泛应用。
OpenCV作为一个开源的计算机视觉库,提供了丰富的图像处理和机器学习算法,为图像处理与识别系统的设计与实现提供了便利。
本文将介绍基于OpenCV的图像处理与识别系统的设计与实现方法。
二、图像处理与识别系统概述图像处理与识别系统是指利用计算机对图像进行处理和分析,从而实现对图像内容的理解和识别。
该系统通常包括图像采集、预处理、特征提取、分类识别等模块。
基于OpenCV的图像处理与识别系统可以应用于人脸识别、车牌识别、物体检测等领域。
三、OpenCV简介OpenCV是一个跨平台的计算机视觉库,提供了丰富的图像处理和机器学习算法。
它支持多种编程语言,如C++、Python等,便于开发者进行图像处理与识别相关的应用程序开发。
四、图像处理与识别系统设计1. 图像采集图像采集是图像处理与识别系统中的第一步,通常通过摄像头或者读取存储在本地的图片文件进行。
OpenCV提供了丰富的接口和函数来实现图像的采集和读取操作。
2. 图像预处理在进行特征提取和分类识别之前,通常需要对图像进行预处理操作,如去噪、灰度化、边缘检测等。
OpenCV提供了各种滤波器和算法来实现这些预处理操作。
3. 特征提取特征提取是图像处理与识别系统中非常重要的一步,通过提取图像中的特征信息来描述和区分不同的对象。
OpenCV提供了各种特征提取算法,如HOG特征、SIFT特征等。
4. 分类识别分类识别是图像处理与识别系统中的核心任务,通过训练分类器来对输入的图像进行分类。
OpenCV支持多种机器学习算法,如SVM、KNN等,可以用于实现分类器的训练和测试。
五、图像处理与识别系统实现1. 环境搭建首先需要安装OpenCV库,并配置相应的开发环境。
可以根据官方文档或者在线教程来完成环境搭建工作。
2. 图像采集与读取使用OpenCV提供的接口来实现摄像头采集或者图片读取功能,获取输入图像数据。
基于DSP+FPGA的IRFPA实时图像数字处理系统设计与实现
本 文 针对 红 外实 时 图像 处理 的特 点 ,介绍 由 T I
公 司的 T 3 0 C 4 6定 点 DS MS 2 V 5 1 P芯片作 为核心 处理 单元和 Al r t a公 司型号为 E 1 o F 4 4 的 F GA e P K10 C 8 P
D S c n r la d i tru tr s n e e a ayz d.T e s t m s c m p rm e tlz d i o eg u c i n P o to n n er p e po d w r n l e h yse wa o a t n ai e nt i htf n to m o u e c o di g t t u c ins T e h d a e r ai ai n a d s fw a e d sg ft r e f nci n m o u e d l sa c r n o isf n to , h a w r e l to n o t r e i n o h e u to d l s r z we edic s d i t i. r s use ndea l Ke y wor : I ds RFP : r a・i e i a epr c s i g: no ・ io m iyc re to A e ltm ・ m g o e sn n・ f r t o r c in un
Ab ta t n od rt mp o et ei gn u ly o n ae o a ln I P sr c .I re o i r v h ma ig q ai fI f rd f c lpa e(RF A)d tco s n ifae t r ee tr,a n r d r
由于制造和 环境 的影 响 ,I F A响应 的非均 匀性 等 问 RP 题制 约 了红 外系 统 的探 测性 能 ,在 一定程度 上 限制 了 红 外成像系 统 的应 用 。因此 ,应 用嵌 入式 图像处 理系 统 进行 实 时 的 非均 匀 校 正 和 图像 处 理 以获得 高质 量 的 红外图像 将成 为红外 成像技术 推广 的关键 。 目前 红外 热 像 仪 嵌 入 式 成像 电路 的组 成 结 构 主 要有 三种 方式 :单片机 +F GA、DS +F GA和 定制 P P P A I 芯片 。从提 高成 像组件 的稳 定性 、可靠 性 、温 SC 度适应性 出发 ,兼顾 系统 的柔性 ( 为今 后功 能扩展 或 不 断出现 的新算法 的应用 留有 余地 ) DS +F G 作 , P PA 为系统架 构 的方案 更具优 势 。采用 这种 设计 结构 ,可
电力设备运行状态在线监测系统的设计和实现

电力设备运行状态在线监测系统的设计和实现摘要:当前,在改革开放的历史进程中,城镇化的快速发展促进了电力体制的不断更新。
然而,随着现阶段电力需求的不断增长,对电网安全的稳定性提出了更高的要求。
电力设备承担着国家战略发展的重要任务,其稳定性和可靠性具有重要意义。
研究了电力设备运行状态在线监测系统的设计方案,为提高电网运行安全性提供参考。
关键词:电力设备;运行状态;在线监测系统;设计和实现引言输电过程需要根据电力设备的运行情况来完成。
作为智能电网的核心组成部分,电力设备的安全稳定运行将直接影响到整个电网。
电力系统规模和范围的不断扩大对电力设备运行状态监测提出了更高的要求,电力设备运行状态在线监测系统的设计与改进仍是当前研究的重点。
智能电网和动态增容技术的不断发展和完善,为实现电力设备运行状态的实时、高效监控过程提供了强有力的支持。
但由于技术和成本的限制,还存在一些问题,如单点监控、尚未联网形成监控系统等,交互水平有待提高,在实际使用过程中还需要进一步提高,以降低故障率、使用维护成本。
1电力设备运行状态在线监测系统的设计1.1在线监测系统的总体规划电力设备在线监测系统,首先要建立监测基站,选择发电站和发电厂配置相应监测子站。
在监测子站中,要采集每一个通过数据采集器收集到的数据,通过数据模块将数据进行转化处理,定时发送到监测子站,存入统一数据库。
再由监测子站将数据统一传输到中心站上,并入数据库中进行存储。
1.2无线传感器网络设计(1)支持远距离传输,电力设备运行中传送距离一般同电压等级成正比,220KV的输电线路较长,尤其是电力设备电线路可达到上千公里,可能穿越不同的区域,需以不同区域的实际情况为依据对相应监测设备进行部署,重点监测区域间的间隔可能较远,需网络支持远距离传输功能。
(2)灵活的拓扑结构,满足不同线路类型的监测需求,连接不同电力设备的输电线路通常呈线性排布,网络节点(安装于杆塔上)则呈线性拓扑结构,通过采用同塔多回(多回输电线路共用一个杆塔)的方式可节省占地资源,由三相导线和架空地线构成一回线路,在需同时监测多条输电线路的情况下,使局部呈网状网络拓扑结构。
基于改进Canny算法的实时边缘检测系统设计与硬件实现
基于改进Canny算法的实时边缘检测系统设计与硬件实现赵安才;周强【摘要】针对传统Canny边缘检测算法中的边缘连接是通过设定固定阈值完成的,无法自动适应外界检测环境变化的问题,在FPGA上设计实现了一种基于改进Canny算法的实时边缘检测系统.该系统利用OSTU算法(最大类间方差法)自动选取合适的双阈值,能够对摄像头模块采集的视频图像进行实时处理,提取出每一帧图像的边缘,并在显示器上显示.实验结果表明,该系统能在在外界环境发生变化时,不需要做出调整,仍然能够很好的检测到图像的边缘.%In traditional Canny edge detection algorithm,the edge connection is completed by a fixed threshold,which cannot automatically adapt to changes in the external detection environment.So a realtime edge detection system based on improved Canny algorithm is designed and implemented on the FPGA,in which the OSTU algorithm (maximum interclass variance method) is used to automatically select the appropriate double threshold.The system can process the video images collected by the camera module in real-time,get the edge of every frame and then display it in monitor.The experiment result show that when the external environment changes,the system can still detect the edge of images very well without adjustment.【期刊名称】《电子设计工程》【年(卷),期】2018(026)007【总页数】5页(P189-193)【关键词】Canny;FPGA;OSTU;自适应【作者】赵安才;周强【作者单位】北京航空航天大学自动化科学与电气工程学院,北京100191;北京航空航天大学自动化科学与电气工程学院,北京100191【正文语种】中文【中图分类】TP391图像的边缘通俗讲是指图像中前景与背景之间的分割界线,这些分割界线是由一系列的像素点构成的,且其有一个共同点,即其领域内的颜色灰度存在阶跃变化。
嵌入式系统中的实时图像处理与识别设计

嵌入式系统中的实时图像处理与识别设计嵌入式系统是指在特定应用领域中集成了计算机硬件和软件的一种特殊计算机系统。
随着技术的发展,嵌入式系统在各个领域中得到了广泛应用,其中实时图像处理与识别是嵌入式系统中的一个重要应用。
实时图像处理与识别是指对于来自摄像头或者其他图像采集设备的图像数据,在特定时间要求下进行处理和分析的过程。
这是一项技术复杂且要求高性能的任务。
在嵌入式系统中进行实时图像处理与识别的设计是一个具有挑战性的任务,需要考虑到系统资源的有限性以及实时性的要求。
首先,在嵌入式系统中进行实时图像处理与识别的设计需要从硬件和软件两个方面进行考虑。
在硬件方面,需要选择合适的处理器和图像传感器。
处理器的选择应考虑到计算能力和功耗的平衡,常见的选择有ARM、DSP等。
图像传感器的选择应根据应用需要考虑分辨率、动态范围和灵敏度等参数。
此外,还需要考虑到外设接口的选择,如SD卡、USB、以太网等。
在软件方面,需要选择适当的算法和工具来实现实时图像处理与识别的功能。
对于实时图像处理,可以采用基于硬件的加速器,如DSP、GPU等,来加快图像算法的执行速度。
常用的实时图像处理算法有滤波、边缘检测、运动检测等。
而对于图像识别,可以采用机器学习算法,如深度学习、卷积神经网络等。
这些算法需要在嵌入式系统中进行优化和适配,以满足实时性的要求。
在实时图像处理与识别的设计中,还需要考虑到系统资源的有限性。
嵌入式系统通常具有较小的内存和存储器容量,因此需要对算法进行优化,减少内存和存储器的占用。
可以采用压缩算法来减小图像数据的大小,降低存储器的消耗。
此外,还可以采用流水线和并行处理等技术来提高算法的执行效率,实现实时性的要求。
另外,实时图像处理与识别的设计还需要考虑到系统的稳定性和可靠性。
嵌入式系统往往需要长时间的稳定运行,因此必须减少系统的崩溃和死锁问题。
可以通过合理的任务调度算法和异常处理机制来提高系统的稳定性。
同时,还需要考虑到系统的可维护性和可扩展性,以便于后续的软件升级和功能扩展。
一种基于参考帧的实时图像处理系统设计
f me ( frnef m ) tebs ad aeac icue i d s n d ad te ky i ussc sslco fh rw r eore r a r eec r e, h ai hrw r rht tr s ei e, n h e s e u h a eet n o ad ae rsuc , e a c e g s i
a e mp e h fa i lt o he n xa l ,t e e sbi y f t pr d cin l o i i e ito a g rt hm a d t r a tme n he e l i pe om a c o h s se f r r n e f t e y t m a e nay e . Th a t me i i r a lz d e r h tc s i
维普资讯
tpetn&po e io enl ̄ plao ii ' e Le t ho g s , t i e oe ! d
文 章 编 号 :0 2 8 9 ( 0 7 S — 1 1 0 10 — 6 2 20 )10 5- 3
一
种基于参考帧的实时图像处理系统设计 ・ 设・ 实 计 用
调 二 l 整固 : l:
基于TMS320C6201实时图像处理系统的EMC设计
一
一
r
● ● ● ●go … …
…
认 证 与 电 磁 兼 容 卷
Ce r i i at On & EM C t f C i
EM C s gn a - i e I age y oc s i De i ofRe l t m m r Pr e s ng Sys em t Bas d e on TM S320C620 1
s f a e a t .m m ig m e s ew i m p a i. n ve of h y t m C B m a u a t r n ee t o t r n .a w n a ur t e h h ss i iw e s se P t n f cu e i lc r oma e i gn t c c m p t it u s i . h s p p rb ig o wa d t e m e h d o o o b he d d f m ner r n e a d o a i ly q e t b i on t i a e r s f r r h n t o fh w t e s il e r 0 it f e c n e
Key or w ds: PC B: EM C : EM ; l DSP : TM S3 20C6201
CL hu b ; c m orTN7 2 0
Do cum ontcodeI A
Ar i e ● 1 0 ・ 1 7( 00 ) 6 0 7 ・ 4 t cl D: 0 3 0 0 2 7 0 ・ 0 4 0
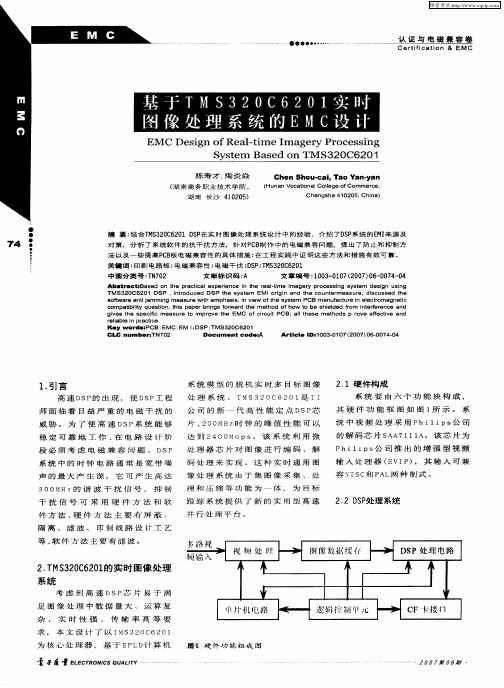
系统 要 由六 个 功 能 块 构 成 ,
其 硬 件 功 能 框 图 如 图 1所 示 。 系
公 司 的 新 一 代 高 性 能 定 点 DS P芯 片 , 0 时 钟 的 峰 值 性 能 可 以 2 MHz 0 达 到 24 Mop 0 0 s。 该 系 统 利 用 微 处 理 器 芯 片 对 图 像 进 行 编 码 解 码 处 理 来 实 现 。 这 种 实 时 通 用 图
基于网络的在线动态视频图像实时监视系统设计与实现
基于网络的在线动态视频图像实时监视系统设计与实现
熊兵;袁石维;汪自云
【期刊名称】《计算机与数字工程》
【年(卷),期】2005(033)005
【摘要】给出了在Visual C++ 6.0平台上开发的一种实用的在线动态视频图像实时监视系统.该系统的每个信源机均可对采集的图像做压缩处理,再通过网络套接字将压缩后的图像信息按请求发送到信宿机,信宿机综合分析所接收的图像集,并做出相应的反应.
【总页数】4页(P123-126)
【作者】熊兵;袁石维;汪自云
【作者单位】湖北师范学院计算机科学与技术系,黄石,435002;湖北师范学院计算机科学与技术系,黄石,435002;湖北师范学院计算机科学与技术系,黄石,435002【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于Internet/Intranet在线监测系统实时监视界面的设计与实现 [J], 郭健忠;蒋全胜;胡友民
2.基于.NET架构的网络在线考试系统设计与实现 [J], 国伟
3.基于ASP技术的网络在线考试系统设计与实现 [J], 周仁云;杨世凤
4.基于Web的炼焦实时监视系统设计与实现 [J], 李玉珠;吴敏;徐福仓;雷琪
5.基于B/S的网络在线教学系统设计与实现 [J], 刘敏;何蕾
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
孙宇清 马 军 山东大学计算机系 ( 济南 !8"$"" )
9&:;<=: >-?@A>#>BC#DBC#A7
摘 要 文章介绍了图像处理在流水线生产中的一 个 应 用 系 统 , 它根据实时要求和图像灰度的不稳定性的特征, 提出
了一种自动分割图像的方法和图像修补算法, 解决了图像处理的“ 自适应性” , 成功地应用到流水线生产的实时检测中。 关键词 实时处理 图像分割 阀值化
’( (*) ) +
!
若 ’( (*) ) +" 则原值不变
若 ’( (*) ) /" 则 ’( 0*1) +
’( (*) ) ,,,若 ’( 0*1) +" ! 原值不变 ,, 若( 0*1) /"
其中 0 取值 (*(2$ 和 (,$ , 1 取值为 )*)2$ 和 ),$ 经过这样交叉处理后,图象轮廓清晰且消除了边缘的毛 刺。图 % 为一处理前后的实物, 正越来越多地使用图像处理技术
*( ,/- ) 0
" !
保持原值
*+,/-.1) *+,/-.20)
进行产品的检测, 从而大大地提高生产效率。图像处理技术在 而如何针对具体的检测环 文 献 %$&’( 中 均 有 比 较 深 入 的 论 述 , 境进行“ 自适应” 性实时图像处理还有待进一步的探讨, 文章即 针对 电 池 流 水 线 生 产 的 特 点 , 改 进 了 一 种 图 像 分 割 及 修 补 算 法, 解决 了 因 光 照 变 化 和 图 像 质 量 问 题 而 引 起 的 误 判 , 提高了 处理速度 , 设计并实现了在线检测实时图像处理系统, 满足了 实时性要求。
或发生误判 , 所以应满足以下原则: 小于 & 的点阵应尽可能地 包含与背景相关联的灰度级, 而大于 & 的点阵应尽可能地包含 但是速度相 与物体相关的灰度级。阀值 & 的选择有许多算法, 对较慢, 不完全适应该系统的实时性要求; 而且照明灯在光照 强度上可能会发生细小的变化, 从而影响阀值的确定。 为此, 根 据该系统所要处理的一类图象的特点,即这类图象的背景单 一, 前景实物图象比较明确, 在处理效果基本相当的情况下, 设 计了一种“ 自适应” 式的快速选定阀值的方法, 能够根据当前图 像的整体灰度适当的调整阀值。 分析这类图象的灰度值直方图, 即图象中的灰度级与出现 这种灰度的概率之间的关系图, 可以看出, 这类图象的直方图 第一个波峰及其周围概 一般有两个大的明显的波峰, 见 图 $, 率较大的灰度、 左侧的灰度均为背景色, 波峰 ! 为实物的边沿 及比较明显的特征点。 所以, 阀值应该选在两个波峰之间, 且为 了既除去背景色又不损失实物信息, 阀值的选择应该在接近波 首先将直方图进行 峰 $ 的结束处。这一算法的过程分为三步: 然后根据平滑后的直方曲线, 选取波峰 $ 之 平滑, 如图 ! 所示, 后的曲率变化最大的点为阀值点。 对于同一类检测物体的虽然 可能由于光照的不同而引起阀值选择的变化, 但他们的直方图 形式基本一致, 所以系统在建立标准产品的模板的同时, 确定 波峰与阀值之间的关系; 然后处理每一个实体时, 根据其峰值 与模板对比做些相应的调整即可。 这样既适应了不同光照强度 引起的阀值变化又满足了实时性要求, 做到了阀值选择的“ 自 适应” 式。
5
3
关键技术的实现
该研究得到山东省自然科学基金( 和国家 Z[3&3"[ 主题 +Z[3&3"[&W)"[&"$&’ ) 的资助。 WXXY"$ )
作者简介: 孙宇清, 主要从事图像处理、 网络计算及 QMD7H 的研究与应用。 马军, 教授, 主要从事人工智能、 网络计算和 QMD7H 的应用与研究。
图%
3
结论
该系统已经成功地应用在电池生产流水线上, 经过与同类
%#!
毛刺的自动修复
由于摄像原因而引起的图像毛刺造成边缘的不光滑, 这类
系 统 的 比 较 , 每 件 产 品 的 处 理 速 度 由 %""45 提 高 到 不 足 产品检测的成功率也由 6!#78 提 高 到 69#%8 , 大大提高 $""45, 了生产效率 * 满足了生产厂家的要求。 ( 收稿日期: !""" 年 7 月)
!
系统的整体结构
该系统的结构如图所示, 主要有三部分构成: 数据的获取、
图像处理和流水线控制。 数据的获取是通过数字摄像机拍摄下 流水线上 的 产 品 检 测 面 , 将其数字图像传送到计算机中; 而图 像处理是将所得到的图像进行快速的分析与处理, 经与标准模 版匹配与 检 测 , 分析出产品的合格与否, 从而反馈到生产流水 线上, 进行必要的控制。 图像处理是该系统的关键, 其分析结果直接影响到产品的 合格率和生产效率, 其面临的主要问题有: 系统的实时性要求; 图像的点阵特性和实物的几何特性之间的矛盾; 数字化过程中 由于灰度的差异而形成的毛刺与实物的真实杂点的划分; 以及 由于 照 明 灯 光 的 细 小 变 化 而 引 起 的 实 物 灰 度 与 标 准 件 之 间 的 差异。 鉴于以上几点,该系统将图像处理的过程划分为四步 处理: 图像的阀值化处理。 为了提取图像中实物的几何特征, ( $) 必须将实物与背景区分开来, 同时又不损失图像中实物内部的 有用信息, 为此系统采取半阀值处理, 将图像进行划分。 选定一 对于图中任意一个元素 *+, , 个适当的阀值 ), -.进行如下处理:
!"# $#%&’( )(* +,-.#,#(/)/&0( 102 3 4#). !&,# +,)’# 5206#%% 78%/#, &( 5&-#.&(# $#/#6/&0(
79( :9;&(’ <) =9( +)ED FDGH# 6* IJ:GCHDK LA<D7AD ,LE;7BJ7M N7<ODK><H-,P<7;7 !8"$"")
图象图形学报, $667#6
!
原值不变 ,,, 若 ’-(*)./"
%#= > 巴拉德等著 # 王东泉等译 # 科学出版社, $679
沈振康编著 # 数字图象处理及应用 # 国防工业出版社, 3# 孙仲康, $67?
’-0*1.+"* 其中 0 取值 (*(2$*(,$* 而 1 取值 )*)2$*),$,,, 若 ’-(*).+"
再用相同的方法对于图象中的每一个象素 ’ ( (, ) ) 按八方 计算机工程与应用 !"""#$!
$9%
从而选出图像中的实物。 图像边缘的修复。 由于图象的点阵特性, 经过阀值处理 ( !) 后的图象在实物边缘部分易产生毛刺。 为了找出图像中的几何 特性, 如直线、 圆等, 需要将不规则的边缘进行自动修复。 实物边界的确定。对于象该系统处理的一类具有明显 ( 3) 边界的 物 体 , 其图像中实物内部与背景有明显的区别, 可以首 先确定 其 边 界 , 然后所有的处理均可以在内部进行, 所以该系 统对于变换后的图象, 分别从四个方向进行处理, 即水平方向、 垂直方向、 相对的两个斜方向, 并根据不同标准模型的特点, 如 圆形电池, 方形电池等, 快速地求出边缘, 模版的建立。 原则上讲, 判别产品的优良品与否实际是 ( ’) 将每一个产品图象与优良品进行模式匹配。对于一幅 454 的 , 为了满足实时性的要 图象, 完 全 匹 配 所 花 费 的 时 间 是 6( 73) 求, 首先建立不同的模版, 即采取提取特征的方法输入标准产 品的几 何 特 性 , 再将图象中的特征点与模版相匹配, 并给出一 定的容错范围( 如允许范围内的偏移等) , 从而大大地提高了判 别速度。 合格产品的判别。根据不良产品的不同错误情况出现 ( 8) 的概率, 按照由大到小、 由粗到细的优先关系进行错误检测, 并 约定只有在前一种情况正常的前提下, 才进行后面的检测。例 如一张照片中同时发生金属板偏移且有较大污物两个毛病, 则 系统检 测 出 金 属 板 偏 移 后 , 即停止进一步的检测, 并返回错误 信息“ 金属板偏移” , 而不再说明污物的情况。只有所有的检测 均通过, 产品才算合格。这样也加速了处理速度。
毛刺的形式可分为两类: 外凸型和内凹型。
参考文献
这里采用背景色和前景色交替扩张的方法进行图象边缘 的修复, 以第一种毛刺为例, 对于图象中的( 每一个象素 ’ ( (, )) 先按八方连续的方式进行背景扩张, 前景图象不做处理, 即
’( (*) ) + $# 栾秋琪编著 # 数字图象处理基础 # 中国铁道出版社, $677 !# 王培珍等 # 基于二维阀值化与 :;< 相混合的图象快速分割方法 # 中国
3>%/2)6/: Q7 <:;MD GKJAD>> >->HD: *JK ; *;AHJK- G<GD=<7D <> B<>AC>>DB#Q7 ;=MJK<HE: *JK <:;MD >DM:D7H;H<J7 ;7B :D7BR <7M <> GKJGJ>DB SE<AE <> T;>DB J7 HED KD;= H<:D KD?C<KD:D7H ;7B HED AE;K;AHDK J* C7>H;T=D <:;MD MK;-7D>>#UH >J=OD> HED V;CHJ GKJAD>>V ?CD>H<J7 ;7B S;> C>DB <7 G<GD=<7D BDHDAH<J7 >CAAD>>*C==-# ?#8@02*%: <:;MD >DM:D7H;H<J7 , <:;MD :D7B<7M , KD;= H<:D GKJAD>> >->HD:>