一种机器鱼仿真平台场地与动态实体的实时绘制方法
机器鱼的运动仿真方法
定理 1[7] : 设 P (t ) 是以给定的点列 Pi (i=1,2, … , n)为控制顶点的区 间 [a, b] ( a < b) 上定义的 n 次 Bézier 曲线,即, P (t ) = ∑ Pi Bn, i (
i=0 n
t −a ) ( a ≤ t ≤ b )) b−a
(4)
则
Dec.
变形后鱼体上点的坐标和其法线的求解如下: uuu r A 点的法线为 nA = BA ,A 点的切向量为 AC ,则 A 点的法 线为:
由于 Bézier 曲线插值其控制多边形的起点和终点,细 分的终止条件可相当直观地给出:如果 Bézier 曲线 Q (u ) 上 任一点与连接该点曲线两端点的连线 P 0P 3 的距离
E ξ
D (U ) = T 2 R 2 (T1 R1 ) − 1U
' U
(2)
其中 T1 为矢量 OAU 的平移矩阵, T2 为矢量 O A 的平移矩
η y ζ 图2 z 坐标系 x
阵。 因此, 物体的变形与轴的变形密切相关。 通过对轴线的 弯曲和伸长,达到控制物体弯曲和伸长的目的。除此之外, 若在轴线的每一点附加一比例缩放因子, 还可以实现物体的 比例缩放和扭曲变形。此时 D(U ) 可计算如下:
引
言
1
深入的研究[2]。 在国内, 北京航空航天大学的研究人员研制了类似八目 鳗的曲伸式仿生鱼。 哈尔滨工业大学机械电子工程系正在研 究的仿生鱼机器人申请了国家自然科学基金项目。 哈尔滨工 程大学水下机器人实验室开发了“仿生-Ⅰ”号机器鱼(图 1) , 用于研究仿生推进的机理及其在微小型无人水下探测器 上应用的可行性。
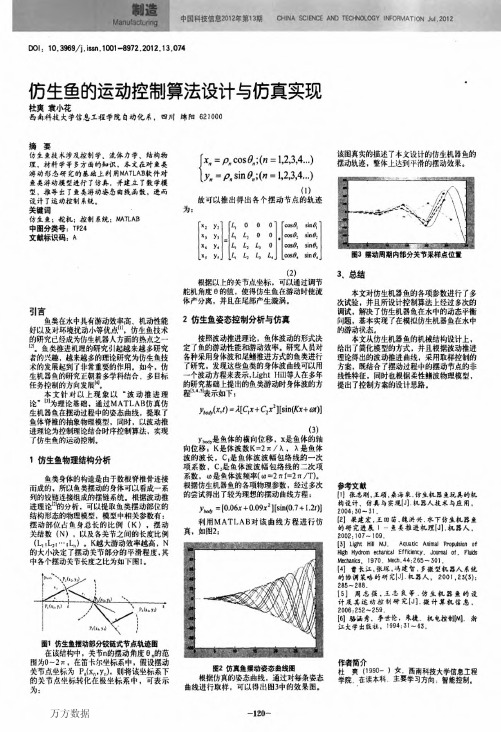
由于鱼在摆动过程中,其形状是在不断变化的,水动力 系数也是在不断的变化的, 所以很难按照传统的潜艇操纵性 方程给出其水动力模型, 只能对应一种特定的摆动规律, 即 某一摆幅和相位差下,计算不同航速下的在其前进方向( X 方向)的水动力合力(有正也有负) ,取合力为零的情况, 在这种状态下,可以认为,在这一摆幅和相位差下,鱼匀速 运动的速度即为其合力为零时对应的速度。 鱼在回航时, 鱼 尾只在一边摆动(比如说左侧) ,那么鱼向左转,其回转角 速度与摆幅及相位差有一个对应的关系,系数可由试验测 出。 另外, 胸鳍升力和攻角的关系可由水动力试验给出 (图 3) 。
一种仿生机器鱼的设计

EXCHANGE OF EXPERIENCE 经验交流摘要:目前,海洋、河流的污染状况日趋恶化,海洋、河流中污染物的情况随着时间的推移而变得更加严重。
论文设计一种仿生机器鱼,模仿鱼的游动,并搭建复杂自动控制系统,实现仿生机器鱼的自主游动、遥控游动和水体监测等功能。
本仿生机器鱼可以在水中长时间工作,提高工作效率,降低风险,而且可以监测水体质量。
关键词:仿生鱼;水下机器人;模块化;多传感器一、系统总体设计本作品设计一种仿生机器鱼,模仿鱼的游动,并搭建复杂控制系统等,实现机器鱼的自主游动、遥控游动和水体监测等功能。
控制方式上,仿生鱼上安装红外光电开关等传感器,搭载32通道舵机控制器,蓝牙信号控制舵机,可实现仿生鱼在水中的受控游动,根据视频传输实时画面来控制,以适应复杂的使用环境,加强其可靠性程度。
机体中部设置主控板及电源,背部设置充电接口,尾部设置三枚舵机来实现机体的驱动动力来源,机体两侧的鱼鳍控制机体的上浮下沉,背部鱼鳍由舵机控制机体的运动趋势方向,头部及腹部配置多功能模块搭载平台,以根据不同需求搭载不同模块。
本仿生鱼上承载无线数据传输装置等,可实现图像拍摄、采集,将收集到的数据信号传输到中央处理设备并做出避障等动作,以及检测水体质量等功能。
二、硬件系统(一)测距模块机器仿生鱼头部壳载有模块化云台,搭载测距模块[1],测距模块主要包括:电源电路、超声波发射单元、超声波接收单元、声音报警单元、单片机最小系统等。
(二)蓝牙控制模块蓝牙控制模块包括(如图1所示):电源电路、继电器、单片机最小系统等。
蓝牙模块搜索蓝牙地址并连接,单片机最小系统接收到信号后控制主机的舵机控制板,控制板调取相应的指令库文件,执行相应的动作组,从而控制机身的运动。
(三)遥控单元遥控单元由控制电路、操纵器、无线数字传输单元和遥控接收机组成[2]。
操纵器采取按键识别,将每个按键对应的遥控指令转换成编码信号,并通过单片机的串口发出。
无线数字传输单元主要完成指令编码信号的调频和高频功率放大,然后由发射天线对编码信号进行发送。
仿生机器鱼玩具的机构设计_仿真与实现
4 ) 设计结果:结构、运动、控制数据等。
3. 仿生机器鱼的运动仿真
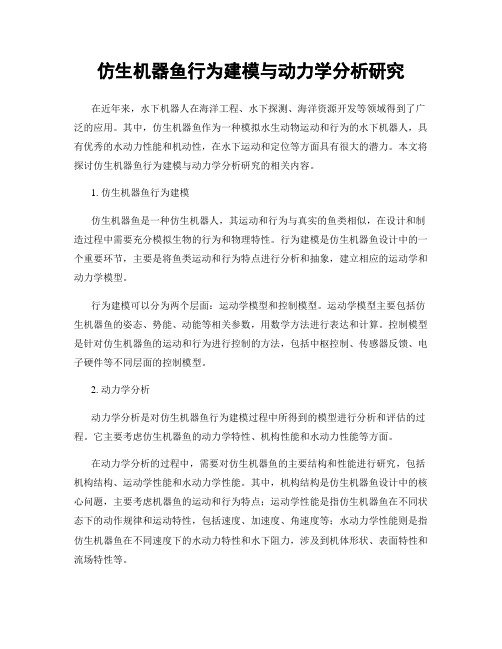
图 5(a)给出了一个基于鲹科鱼类设计的摆动 轮廓图。此设计方案中,关节数 n=4,摆动部占身 长比例 r=0.6,波长倍数 0.6 ,各关节长度比例 为 1:0.93:0.76:0.61,摆动的曲线方程为:ybody= [0.05x+0.09x2][sin(0.5x)],周期采样数 m=18。 其仿真游动效果见图 5(b)。
成的包络区域的面积,m 情况,存在等式约束与
不等式约束,我们选择混合罚函数法来进行参 数优化。
惩罚函数法通过构造惩罚函数把有约束优化 问题转换为无约束优化问题,采用坐标轮换等方 法实现对无约束优化问题的求解,实现对有约束 问题的参数优化。通过对关节结构尺寸的优化, 得到按照波动方程ybody(x,t)进行游动的仿生机器 鱼的最优一组结构尺寸参数。
参数。 3.5 设计实现 鱼类身体的摆动大体按照式(1)所表示的波
动 方 程 进 行 摆 动 ,由 于 机 器 鱼 是 由 多 个 僵 硬 的 连 杆 铰 接 组 成 ,为 实 现 波 动 运 动 ,每 个 关 节 点 必 须 在 理 论 曲 线 上 。关 节 点 对 理 论 曲 线 的 匹 配 过程如图 3。当前关节与前一关节的延长线在 连接处产生一个夹角,骨架的运动就是在驱 动电机带动下,通过改变夹角的值来产生运 动。
2. 仿生机器鱼的设计思想
一种基于视觉的仿生机器鱼实时避障综合方法
⼀种基于视觉的仿⽣机器鱼实时避障综合⽅法第卷第期控制与决策年⽉⽂章编号⼀种基于视觉的仿⽣机器鱼实时避障综合⽅法陈尔奎喻俊志王硕谭民江南⼤学信控学院江苏⽆锡中国科学院⾃动化研究所复杂系统与智能科学重点实验室北京摘要提出了⼀种基于视觉的仿⽣机器鱼实时避障综合⽅法该⽅法基于颜⾊模型利⽤指令和指令采⽤并⾏处理算法实现图像的快速处理然后基于栅格法建⽴环境模型利⽤势场法获得优化路径规划策略在此基础上采⽤模糊⽅法对机器鱼的运动⽅向进⾏控制利⽤速度分布函数对机器鱼的运动速度进⾏控制实验结果表明了所提⽅法的有效性和可达性关键词仿⽣机器鱼视觉信息实时避障综合⽅法中图分类号⽂献标识码引⾔⽬前仿⽣机器鱼的研究重点主要集中在仿鱼推进模式的⽔动⼒学模型和开发⾼效⾼机动性的机器鱼等⽅⾯⽽对机器鱼的导航与避障⽅法研究较少机器鱼导航与实时避障的研究涉及到机器鱼本体和障碍物的识别与定位以及机器鱼的运动⽅向和速度控制视觉系统是⽤于机器鱼识别与定位的传感器但受图像处理技术和计算机运算速度的限制实时性是制约机器鱼导航与实时避障的关键问题由于流体⼒学和运动学的复杂性试图通过建⽴数学模型控制机器鱼的运动⽅向是极其困难的此外受⽔动⼒学惯性的影响虽然实验⽤机器鱼的速度已降为零但机器鱼仍会在⽔中漂移⼀段距离因此如何在速度和应⼒之间找到⼀种平衡是机器鱼平稳运动⾄关重要的⼀环基于此背景本⽂提出了⼀种基于视觉信息的收稿⽇期修回⽇期基⾦项⽬国家计划项⽬作者简介陈尔奎男⼭东成武⼈⾼⼯博⼠从事机器⼈智能控制等研究喻俊志男湖南长沙⼈博⼠⽣从事多机器⼈系统机器鱼控制等研究仿⽣机器鱼实时避障⽅法利⽤和技术的数据处理并⾏性来提⾼机器鱼图像处理的实时性采⽤模糊⽅法对机器鱼的运动⽅向进⾏控制运⽤分段速度控制策略在速度和应⼒之间寻求平稳性以此对机器鱼的运动速度实施控制最后在研制的机器鱼上实现了上述算法环境描述研制的机器鱼长宽⾼在有障碍物的⽔池中运动研究重点在于验证算法的可⾏性障碍物的形状并不重要因此在⽔池中放置了若⼲个半径不同的圆形障碍物利⽤悬挂在⽔池正上⽅的像机作为传感器采集⽔池环境信息并⽤正⽅形栅格选鱼长的⼀半约作为栅格的边长将此信息映射到像平⾯内每⼀个栅格有⼀个累积值规定值的范围为⽤来表⽰此栅格中存在障碍物的可信度在机器鱼运动过程中环境不断被像机检测存在障碍物的栅格若被重复检测则其值会增加否则维持原值不变整个过程如图所⽰即可认为是要检测的点式中和分别为⾊调的最⼩阈值和最⼤阈值和分别为饱和度的最⼩阈值和最⼤阈值和均在初始⼈机交互模块中设定并优化为了消除图像在量化和传输过程中产⽣的寄⽣效应应对颜⾊分割后形成的⼆值化图像进⾏平滑化处理在平滑过程中采⽤点邻域平均法平滑处理后对于⼤于某⼀阈值的实体⽬标点集合且分别计算其坐标的质⼼和坐标的质⼼则⽬标域的质⼼坐标为其中这⾥为⽬标区域内的像素点数通过⽬标区域质⼼坐标的计算可识别机器鱼障碍物等实体的中⼼位置在图像识别过程中像素点和像素点之间在时间空间上相互独⽴且运算结果互不相关因此为了充分利⽤机器的字长优势采⽤技术和技术的数据处理并⾏性采⽤汇编语⾔编写图像处理程序在程序中实现⼀次对多个像素点的并⾏操作即在⼀次操作中把多个像素组合成像素组作为输⼊经过处理后识别机器鱼障碍物等实体的时间约为左右能够满⾜实时性要求路径规划和避障策略以机器鱼不碰到障碍物⽽游到⽬标点的距离和为代价函数希望在机器鱼运动空间内快速找到⼀条⽆碰撞的最⼩另外考虑到机器鱼将来的应⽤环境主要是全局未知环境因此把以机器鱼与⽬标点之间连线为对⾓线的矩形区域内环境当作感知信息随着机器鱼的移动矩形的⼤⼩也在变化矩形变化⼀次若障碍物仍在其内则其值增加如超过则不再增加定义图所⽰的矩形区域内的障碍物数⽬为第个障碍物距机器鱼与⽬标点之间连线的垂直距离为距机器鱼的距离为并设定门槛值为导航与避障策略如下对所有的障碍物如果则使机器鱼直接向⽬标点运动第期陈尔奎等⼀种基于视觉的仿⽣机器鱼实时避障综合⽅法如果只有⼀个障碍物并且其安全距离⼩于则在该障碍物四周各⼀定数⽬的栅格内寻找最⼩的然后使机器鱼按照规划的路径向⽬标点运动如果有两个或两个以上的障碍物并且存在个障碍物其则采⽤局部势场法在机器鱼的运动过程中如果机器鱼运动到距某⼀障碍物较近时为了增加避障的可靠性设⼀安全层如图所⽰机器鱼若进⼊安全层则加⼤斥⼒系数加⼤的程度与值有关值越⼤系数放⼤越多图中和根据实验经验来选择且卷调整⽹络权值较好地满⾜了混沌辨识的实时性结合线性正交算法设计优化补偿控制器⼤⼤提⾼了跟踪控制精度混沌系统的实验结果证明了本⽂⽅法的有效性参考⽂献⾜**⼄U V*O XVO XK机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机机上接第页KU U⼄⼄K FUVKV UUV—U U⼄⼄K X*K⼄&阮秋琦数字图像处理学北京电⼦⼯业出版社朱述龙张占睦遥感图象获取与分析北京科学出版社//////F/钱晓捷汇编语⾔程序设计北京电⼦⼯业出版社黎明刚郭军基于伪技术的并⾏识别算法及应⽤中⽂信息学报JK*⼄陈尔奎喻俊志王硕仿⽣机器鱼运动⽅向的模糊控制研究⾼技术通讯K ZH控制与决策第卷⼀种基于视觉的仿⽣机器鱼实时避障综合⽅法作者:陈尔奎,喻俊志,王硕,谭民作者单位:陈尔奎(江南⼤学,信控学院,江苏,⽆锡,214036),喻俊志,王硕,谭民(中国科学院⾃动化研究所,复杂系统与智能科学重点实验室,北京,100080)刊名:控制与决策英⽂刊名:CONTROL AND DECISION年,卷(期):2004,19(4)被引⽤次数:3次参考⽂献(14条)1.黎明刚;郭军基于伪MMX技术的并⾏识别算法及其应⽤[期刊论⽂]-中⽂信息学报 2000(01)2.钱晓捷汇编语⾔程序设计 20003.Garcia-Campos R;Batlle J;Bischoff R Architecture of an object-based tracking system using colour segmentation4.Sfakiotakis M;Lane D M;Davies J B C Review of fish swimming modes for aquatic locomotion[外⽂期刊] 1999(02)5.朱述龙;张占睦遥感图象获取与分析 20006.阮秋琦数字图像处理学 20017.Garcia R;Cufi X;Batle J Positioning an underwater vehicle through image mosaicking[外⽂会议] 20018.Hirata K Development of experimental fish robot 20009.Anderson J M;Kerrebrock P A The vorticity control unmanned undersea vehicle (VCUUV)-An autonomous vehicle employing fish swimming propulsion and maneuvering 199710.KATO N;Furushima M Pectoral fin model for maneuver of underwater vehicles[外⽂会议] 199611.Kato N;Inaba T Hovering performance of fish robot with apparatus of pectoral fin motion 199712.Triantafyllou M S;Triantafyllou G S An efficient swimming machine[外⽂期刊] 199513.陈尔奎;喻俊志;王硕仿⽣机器鱼运动⽅向的模糊控制研究[期刊论⽂]-⾼技术通讯 2004(02)14.BORENSTEIN J;Koren Y Real-time obstacle avoidance for fast mobile robots 1989(05)本⽂读者也读过(10条)1.赵启冲.梁建宏.谢成荫.张丽.ZHAO Qi-chong.LIANG Jian-hong.XIE Cheng-yin.ZHANG Li机器鱼⽐赛图像处理系统[期刊论⽂]-机械⼯程师2009(2)2.⽅⾮.谢⼴明⼀种基于图像的机器鱼动态跟踪算法[期刊论⽂]-机器⼈技术与应⽤2009(4)3.沈志忠.曹志强.谭民.王硕.Shen Zhizhong.Cao Zhiqiang.Tan Min.Wang Shuo基于增强式学习的仿⽣机器鱼避障控制[期刊论⽂]-⾼技术通讯2006,16(12)4.王⽥苗.马⽂凯.梁建宏.Wang Tianmiao.Ma Wenkai.Liang Jianhong仿⽣机器鱼尾鳍拍动的控制算法[期刊论⽂]-北京航空航天⼤学学报2006,32(10)5.魏洪兴.王⽥苗.梁建宏.刘淼基于⽹格算法的多仿⽣机器鱼协调游动控制[期刊论⽂]-中国造船2004,45(1)6.喻俊志.陈尔奎.王硕.谭民⼀种应⽤于多仿⽣机器鱼协作的图像并⾏处理⽅法[期刊论⽂]-⾼技术通讯2004,14(1)7.桑海泉.王硕.谭民.张志刚.SANG Hai-quan.WANG Shuo.TAN Min.ZHANG Zhi-gang基于红外传感器的仿⽣机器鱼⾃主避障控制[期刊论⽂]-系统仿真学报2005,17(6)8.王硕.沈志忠.曹志强.周超.王龙.桑海泉仿⽣机器鱼的研究与开发[会议论⽂]-9.机器鱼[期刊论⽂]-少年科学2006(3)10.梁建宏.王⽥苗.魏宏兴仿⽣机器鱼技术研究进展及关键问题探讨[期刊论⽂]-机器⼈技术与应⽤2003(3)引证⽂献(4条)1.韩敏.王明慧.范剑超基于改进差分进化算法的在线轨迹优化[期刊论⽂]-控制与决策 2012(2)2.叶秀芬.关红玲.张哲会.杨博⽂⽤于避障研究的微型仿⽣机器鱼3维仿真系统[期刊论⽂]-中国图象图形学报A 2011(3)3.彭⽴⼈⼯鱼路径及⾏为规划的研究与实现[学位论⽂]硕⼠ 20064.张虹仿⽣机器鱼航⾏控制技术研究[学位论⽂]博⼠后 2006本⽂链接:/doc/59ad0d00581b6bd97f19ea54.html /Periodical_kzyjc200404021.aspx。
水中机器鱼仿真系统中的伪3D绘制
文章编号 : 1 0 0 6— 9 3 4 8 ( 2 0 1 3 ) 0 4—0 3 3 9— 0 5
计
算
机
仿
真
2 0 1 3 年4 月
水 中机 器 鱼仿 真 系统 中 的 , 李淑 琴 , 谢 广 明
( 1 .北京信息科技大学计算机学院 , 北京 1 0 0 1 0 1 ;
i f s h ’ S j o i n t a n d c a u d a l p h a s e s h i t f .T h e n b y a p p l y i n g G D I + t e c h n o l o y, g t h e p r o b l e m o f c o l l i s i o n c a u s e d b y t h e R i g i d
Mo d e l o f t h e p l a f t o m r b e f o r e w a s r e s o l v e d,wh i c h b i r d g e s p h y s i c a l l a y e r a n d t h e i n t e r f a c e l a y e r or f t h e r o b o i f s h s i mu — l a t i o n a n d r e d u c e s t h e p h e n o me n o n o f“ c r o s s i n g ”i n i f s h c o l l i s i o n e f e c t i v e l y .Ex p e i r me n t a l r e s u l t s p r o v e t h a t t h e i m—
仿生鱼的运动控制算法设计与仿真实现
10. 3969/j. issn. 1001-8972. 2012.13.074仿生鱼的运动控制算法设计与仿真实现杜爽袁小花西南科技大学信息工程学院自动化系,四川绵阳621 000仿生鱼技术涉及控制学、流体力学、结构物理,材料学等多方面的知识,本文在对鱼类游动形态研究的基础上利用MATLAB软件对鱼类游动模型进行了仿真,并建立了数学模型,推导出了鱼类游动姿态曲线函数,进而设计了运动控制系统。
仿生鱼;舵机;控制系统;MATLAB@@[1]张志刚,王硕,集海泉.仿生机器鱼玩具的机构设计、仿真与实现[J].机器人技术与应用,2004:30~31.@@[2]梁建宏,王田苗,魏洪兴.水下仿生机器鱼的研究进展Ⅰ- 鱼类推进机理[J].机器人,2002:07~109.@@[3] Light Hill MJ. Aquatic Animal Propulsion of High Hydrom ecianical Efficiency. Jornal of. Fluids Mechanics, 1970. Mech.44:265~301.@@[4]曾长江,张琛,冯建智.多微型机器人系统的协调策略的研究[J].机器人,2001,2 3(3)285~288.@@[5]周志强,王志良等.仿生机器鱼的设计及其运动控制研究[J].微计算机信息,2006:252~259@@[6]骆涵秀,李世伦,朱捷.机电控制[M].浙江大学出版社,1994:31~63杜爽(1990-)女.西南科技大学信息工程学院.在读本科.主要学习方向:智能控制。
万方数据仿生鱼的运动控制算法设计与仿真实现作者:杜爽, 袁小花作者单位:西南科技大学信息工程学院自动化系,四川绵阳,621000刊名:中国科技信息英文刊名:China Science and Technology Information年,卷(期):2012(13)1.张志刚;王硕;集海泉仿生机器鱼玩具的机构设计、仿真与实现[外文期刊] 2004(5)2.梁建宏;王田苗;魏洪兴水下仿生机器鱼的研究进展Ⅰ-鱼类推进机理 20023.Light Hill MJ Aquatic Animal Propulsion of High Hydrom ecianical Efficiency 19704.曾长江;张琛;冯建智多微型机器人系统的协调策略的研究 2001(03)5.周志强;王志良仿生机器鱼的设计及其运动控制研究 20066.骆涵秀;李世伦;朱捷机电控制 1994本文链接:/Periodical_zgkjxx201213074.aspx。
仿生机器鱼三维仿真分析

仿生机器鱼三维仿真分析仿生机器鱼是一种模仿鱼类身体结构和游动方式的机器人,它具有良好的机动性和适应性。
在实际应用中,仿生机器鱼可以用于水下勘察、水下探测和水下救援等任务。
为了提高仿生机器鱼的性能,需要进行三维仿真分析,以评估其运动性能和机械结构的稳定性。
首先,三维仿真分析可以用来研究仿生机器鱼的游动方式。
通过建立仿真模型,可以模拟仿生机器鱼在水中的游动轨迹和姿态变化。
通过对仿真结果进行分析,可以确定最佳的游动策略和运动控制算法,以提高机器鱼的运动效率和稳定性。
其次,三维仿真分析可以用来研究仿生机器鱼的机械结构。
通过建立仿真模型,可以对机器鱼的鱼体结构和鱼尾运动机构进行分析。
通过对仿真结果进行分析,可以确定最佳的机械结构设计,以提高机器鱼的机动性和适应性。
在进行仿真分析时,需要考虑以下几个关键因素:1.流体动力学模拟:仿真模型应该能够准确地模拟水的流动和水与机器鱼之间的相互作用。
可以使用计算流体动力学(CFD)方法来模拟水的流动,以及根据流体动力学模拟结果对机器鱼的运动进行分析。
2.运动控制模拟:仿真模型应该能够模拟机器鱼的运动控制算法,以及根据运动控制模拟结果对机器鱼的运动行为进行分析。
可以使用动力学模拟方法来模拟机器鱼的运动控制算法。
3.结构强度分析:仿真模型应该能够模拟机器鱼在水中的受力情况,以及对机器鱼的机械结构进行强度分析。
可以使用有限元分析(FEA)方法来模拟机器鱼的受力情况,以及对机械结构的强度进行分析。
通过三维仿真分析,可以评估仿生机器鱼的运动性能和机械结构的稳定性,为进一步优化设计提供参考。
同时,仿生机器鱼的仿真模型也可以用于测试新的运动策略和结构设计,以提高机器鱼的性能和适应性。
总之,三维仿真分析是研究仿生机器鱼的运动性能和机械结构稳定性的重要手段。
通过建立仿真模型,可以模拟机器鱼的游动方式和机械结构,对其进行分析和评估,为优化设计提供参考。
仿生机器鱼的仿真分析结果可以用于改进机器鱼的运动控制算法和机械结构设计,以提高其性能和适应性。
仿生机器鱼行为建模与动力学分析研究
仿生机器鱼行为建模与动力学分析研究在近年来,水下机器人在海洋工程、水下探测、海洋资源开发等领域得到了广泛的应用。
其中,仿生机器鱼作为一种模拟水生动物运动和行为的水下机器人,具有优秀的水动力性能和机动性,在水下运动和定位等方面具有很大的潜力。
本文将探讨仿生机器鱼行为建模与动力学分析研究的相关内容。
1. 仿生机器鱼行为建模仿生机器鱼是一种仿生机器人,其运动和行为与真实的鱼类相似,在设计和制造过程中需要充分模拟生物的行为和物理特性。
行为建模是仿生机器鱼设计中的一个重要环节,主要是将鱼类运动和行为特点进行分析和抽象,建立相应的运动学和动力学模型。
行为建模可以分为两个层面:运动学模型和控制模型。
运动学模型主要包括仿生机器鱼的姿态、势能、动能等相关参数,用数学方法进行表达和计算。
控制模型是针对仿生机器鱼的运动和行为进行控制的方法,包括中枢控制、传感器反馈、电子硬件等不同层面的控制模型。
2. 动力学分析动力学分析是对仿生机器鱼行为建模过程中所得到的模型进行分析和评估的过程。
它主要考虑仿生机器鱼的动力学特性、机构性能和水动力性能等方面。
在动力学分析的过程中,需要对仿生机器鱼的主要结构和性能进行研究,包括机构结构、运动学性能和水动力学性能。
其中,机构结构是仿生机器鱼设计中的核心问题,主要考虑机器鱼的运动和行为特点;运动学性能是指仿生机器鱼在不同状态下的动作规律和运动特性,包括速度、加速度、角速度等;水动力学性能则是指仿生机器鱼在不同速度下的水动力特性和水下阻力,涉及到机体形状、表面特性和流场特性等。
3. 实验研究为了验证仿生机器鱼的行为建模和动力学分析理论,需要进行实验研究。
实验研究可以分为两个层面:仿生机器鱼的结构设计和系统测试。
在仿生机器鱼的结构设计中,需要结合行为建模和动力学分析的理论,进行仿生机器鱼的机构设计和元件选择,同时考虑机器鱼的性能和使用环境等因素。
在系统测试中,需要对仿生机器鱼进行运动学和动力学测试,验证仿生机器鱼的运动和行为模型的准确性和可行性。
鱼类古生物三维仿真展示,VR教学平台,深圳华锐视点
鱼类古生物三维仿真展示,VR教学平台,深圳华锐视点背景深圳华锐视点是一家专业从事三维仿真和虚拟现实技术开发的公司,该公司在三维仿真领域积累了丰富的技术与经验,并且在高校、博物馆等领域也有着广泛的合作和实战经验。
其中,鱼类古生物三维仿真展示以及相关的VR教学平台是该公司在此领域的一项重要成果。
三维仿真展示鱼类古生物三维仿真展示是指采用三维渲染技术对古代鱼类的形态、结构等信息进行数字化呈现,并在展馆等场景中进行展示。
通过三维仿真展示,观众可以全面地了解这些古代鱼类的特征与生活习性,从而进一步了解生物及自然界的演化历程。
深圳华锐视点在鱼类古生物三维仿真展示方面的优势在于其技术实力强大、经验丰富、处理能力快速等方面。
该公司利用最新的三维扫描技术,对各种不同种类的古代鱼类进行三维数字化建模,并精细地还原了它们的外貌、行为等信息。
同时,该公司也配备了高性能的渲染引擎,能够在较短的时间内完成对大规模三维场景的渲染和展示。
在具体的展示过程中,深圳华锐视点还提供了多种展示模式,包括3D动态展示、VR虚拟展示等,配合各种高科技的互动设备,形成了一种充满趣味与吸引力的展示方式。
同时,该公司也拥有多年的项目经验,具备在现实场景中进行设备安装、场景布置、技术支持等全方面配套服务的能力。
VR教学平台借助虚拟现实技术,VR教学平台可以将鱼类古生物三维仿真展示与传统教学方法结合起来,进一步提高教学的趣味性和互动性。
深圳华锐视点早在多年前就开始了VR虚拟教学平台的建设,并积累了大量的课程内容、教学案例等经验资料,形成了一套成熟的虚拟教学解决方案。
该公司的VR教学平台主要针对高校、博物馆等场所,通过教学案例、互动游戏、VR实验等形式,为学生们提供了一种更加立体、真实的科学教育环境。
通过虚拟仿真技术,学生们可以身临其境地了解生物、人类、自然、历史等方面的知识,提高他们的综合素质和创新能力。
结语鱼类古生物三维仿真展示和VR教学平台是深圳华锐视点在三维数字化领域中的一次重要尝试和创新。
仿生机器鱼群协同行为研究与模型设计
仿生机器鱼群协同行为研究与模型设计近年来,随着科技的飞速发展,仿生机器人越来越受到人们的关注。
其中,仿生机器鱼作为一种模拟鱼类行为的机器人,具有重要的研究价值和应用前景。
本文将探讨仿生机器鱼群协同行为的研究与模型设计,旨在为未来的仿生机器鱼技术发展提供参考。
仿生机器鱼的群体行为是指多个仿生机器鱼在没有中央控制的情况下,通过相互之间的通信和协作,实现整体动作的协同。
这种群体行为在鱼类群体中常见,例如鱼群的集群迁徙和觅食行为。
仿生机器鱼群体行为的研究意义在于,通过模拟和分析这些行为,可以揭示鱼类群体行为的内在机制,并将其应用于机器人的协同控制和智能行为设计中。
为了研究仿生机器鱼群体行为,首先需要对仿生机器鱼的行为进行建模。
行为模型是仿生机器鱼实现群体行为的关键。
常见的行为模型有离散行为模型和连续行为模型。
离散行为模型适用于描述仿生机器鱼在不同状态之间的离散跳跃。
例如,在觅食行为中,机器鱼可以从巡航状态跳跃到集中觅食状态,然后再跳跃到觅食结束状态。
离散行为模型可以通过有限状态自动机来表示,其中每个状态表示机器鱼的一种行为。
通过定义状态间的转换条件和转换概率,可以模拟机器鱼在不同状态之间的切换过程。
连续行为模型适用于描述仿生机器鱼在同一状态下的连续运动过程。
例如,在集群迁徙中,机器鱼需要根据周围的环境信息调整自己的运动速度和方向。
连续行为模型可以通过运动方程来描述,其中包括机器鱼的位置、速度和加速度等动态参数。
通过引入感知和控制算法,可以实现仿生机器鱼的连续运动和协同行为。
在研究仿生机器鱼群体行为时,还需要考虑仿生机器鱼之间的通信和协作方式。
仿生机器鱼的通信可以通过声音、光信号和电信号等方式实现。
例如,仿生机器鱼可以通过发出特定频率的声音来与其他机器鱼进行通信。
通信的目的可以是传递信息、协调行动或者进行分工合作。
在协同行为方面,仿生机器鱼可以通过共享信息、协调运动和分工合作来实现群体行为。
例如,当一只仿生机器鱼发现食物源时,它可以通过发出特定的信号来吸引其他机器鱼。
水中机器人比赛2D仿真平台介绍
1.3仿真平台的结构
显示模 块 客户 端 服务器 端 辅助模 块 客户 端
机器鱼策 略
机器鱼策 略 机器鱼策 略
。。。。。。
核心控制模 块
公共接口模 块 环境设置模 块 运动学建模 TCP/IP Dll Window s TCP/IP Dll
机器鱼策 略
机器鱼策 略 机器鱼策 略
。。。。。。
Window s
(6)点球点 场地上有两个争球点,分别为距离双方球门线中心点水 平方向350mm处。 (7)争球点 场地上有四个争球点。以场地1/2长宽为分割线,将场 地分成长宽相等的四个矩形区域,则争球点在场地各个四分 之一部分的中心位置。 (8)水球 比赛水球直径大约为130mm,颜色为粉红色。 (9)机器人 头部长度:80-100mm 头部宽度:40-50mm 机器人颜色为黑色。 (10)色标设置 每个机器人有两个识别色标,每个色标大小为: 40mm×50mm,统一在机器人头部,机器人前方色标为球队 颜色。可以在服务器界面Fish选项卡上设置机器人色标。
1) 1vs1水球比赛时,假定双方分别为红队和黄 队,红队颜色为红-绿,黄队颜色为黄-绿:
红 队
黄 队
2) 2vs2水球比赛时,假定红队颜色为红-绿、红粉红,黄队颜色为黄-绿、黄-粉红:
红 队
黄 队
3) 3vs3水球比赛时,假定红队颜色为红-绿、 红-粉红、红-橙,黄队颜色为黄-绿、黄-粉红、 黄-橙:
Window s
整体设计框图
服务启动 模块
时 钟 消息
环境设置
环 境 信息 环 境 信息
核心控制模 块
重 绘 信息
仿真界面
位 姿 信息
策 略 模 块
用 户 策略
仿生机器鱼三维仿真分析

学校代码:11517学号:0708071012HENAN INSTITUTE OF ENGINEERING毕业设计题目仿生机器鱼三维仿真分析学生姓名刘欢乐专业班级机械设计制造及自动化0701学号0708071012系(部)机械工程系指导教师(职称) 王新莉(教授)孟凯(助教)完成时间 2011年5月25日河南工程学院论文版权使用授权书本人完全了解河南工程学院关于收集、保存、使用学位论文的规定,同意如下各项内容:按照学校要求提交论文的印刷本和电子版本;学校有权保存论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存论文;学校有权提供目录检索以及提供本论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版;在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。
论文作者签名:年月日河南工程学院毕业设计(论文)原创性声明本人郑重声明:所呈交的论文,是本人在指导教师指导下,进行研究工作所取得的成果。
除文中已经注明引用的内容外,本论文的研究成果不包含任何他人创作的、已公开发表或者没有公开发表的作品的内容。
对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确方式标明。
本学位论文原创性声明的法律责任由本人承担。
论文作者签名:年月日河南工程学院毕业设计(论文)任务书题目仿生机器鱼三维仿真分析专业机械设计制造及自动化学号0708071012姓名刘欢乐主要内容、基本要求、主要参考资料等:选题背景:鱼形机器人不仅可以用于水下考古、水中摄影、探查狭窄水道、测绘海底地形地貌,还可进行水中养殖和捕捞,并作为水下微小型运载工具,在抢险搜救等工作中发挥重要作用。
主要内容:设计一款机器鱼的执行机构,对设计的机构进行三维仿真研究。
基本要求:建立三维模型,进行仿真研究,完成实物制作,提交设计说明书等设计相关资料。
主要参考资料:机电一体化系统设计传感器技术机器人技术机构设计相关科研论文10篇完成期限:指导教师签名:专业负责人签名:年月日目录摘要 (I)ABSTRACT (II)1 引言 (1)1.1 本文研究的目的及意义 (3)1.2 国内外研究现状 (4)1.2.1 国内研究现状 (4)1.2.2 国外研究现状 (6)1.3 论文的主要研究内容 (8)2 仿生机器鱼的机构设计概况 (9)2.1 仿生机器鱼的机构 (9)2.2 舵机设置 (10)3 仿生机器鱼的三维建模与运动分析 (12)3.1 建模软件的选取 (12)3.2 仿生机器鱼的三维实体建模 (13)3.2.1 仿生机器鱼鱼头和鱼尾的三维建模 (14)3.2.2 仿生机器鱼鱼身的三维建模 (15)3.2.3 虚拟装配 (17)3.3 仿生机器鱼的运动分析 (17)4 仿生机器鱼的三维仿真实现 (19)4.1 仿生机器鱼三维仿真的简介 (19)4.2 仿生机器鱼三维仿真 (20)结论与展望 (25)毕业设计工作总结 (27)致谢 (28)参考文献 (29)仿生机器鱼三维仿真分析摘要本文首先对小型鱼类现有的研究进行了描述,表明了鱼类在水下的优势对仿生机器鱼的研究发展将起到重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
r l a e c n n tb h e u f t e a a tv c ln n e 1t e c lii n d t c i n i o a y t n ii s r q ie o e e s a o e t e v n e o h d p i e s a i g a d r a .i o lso e e t S n t e s o e tt e u r d t m o e c o d n t n c ma i n a d o h r is e .p e e t i u a i n p a f r f r s a e r b tc fs t e 1 i y a i o r i a e i f I to n t e s u s r s n s a sm lto l t m o p c o o i i h wi r a . me d n m c r o h t e tte e d r n t o . n ii s r n e i g me h d De i n d t e v n e a d t e r a i a i n o y a c p y i a e d rn d a ,a d d sg o o sg e h e u n h e l to fd n mi h sc lr n e i g i e s n e i n r b t z fs p e r n e a d m o e n at r sa c r i g t h h i a a h n ih s i ih a p a a c n v me tp t n c o d n o t e p ysc l e m c i e f s w mm i g sm u a i n m o e .S h tt e st n i lto d 1 O t a h i e a d t l t e d n mi n i i e o i u a i n p a f r c n b c o d n o t h s c lma h n s e u i e s a i g n o a 1 h y a c e tt sz fsm lto l to m a e a c r i g t he p y i a c i e f h v n e sz c ln y i a d ip a n d s l y.At t e a i e h e p a f r a s p o i e d n m i n i ,a t tc n i , r a -i o a i n h s me tm ,t e n w l to m lo r v d s a y a c e tt y sa i e t y e l me l c to t t i f r a i n f rc ls t t e o u e n t e p a f r . n h e d f r c l s o ee to o p o i e t e c o d n t s o n m to a l o o h rm d l s i h l t m a d t e n e o l i n d t c i n t r v d h o r i a e f o o o o i e c d e o e d t n i Pr c i e r s ls s o a h e g ft a a e t y. a t e u t h w: h eho a e p ysc l a h n s a e s e e r a .i e fd l y h t c t e m t d c n b h i a c i e f h g m c n e 1t m i m . ei g P kn ies y Be ig 1 0 7 , hn ) . ol e E gn ei , e igUnv ri , i n 0 8 1 C ia e o n t j
Ab ta t n o d r t o v h r b e o n e wa e o o o t s s r c :I r e o s l e t e p o l m f u d r t r r b t c n e t URW P GSi D o o i lto l to m . m2 r b t s mu a i n p a f r 1 0
201 . 2 11
兵 工 自动 化
Or n n e I d t y A u o a i n d a c n us r t m to ・7 ・ 9
3 (2 01、
d i1 .9 9 . s.0 6I 7 .0 11 .2 o: 03 6  ̄i n10 -5 62 1.20 1 s
仿 真 平 台 20 中 。 .
关键 词 :机 器 鱼; 水 中机 器人 ;仿 真 平 台;UR GSm2 WP i D
中图 分类 号 :T 3 1 T 2 9 P 1; P 4 文献 标 志码 :A
A a — i eRe d rn e h d o ed a d Dy a c E t y i b t s Re lT m n e i g M t o sf r Fil n n mi n i Ro o h t n Fi
一
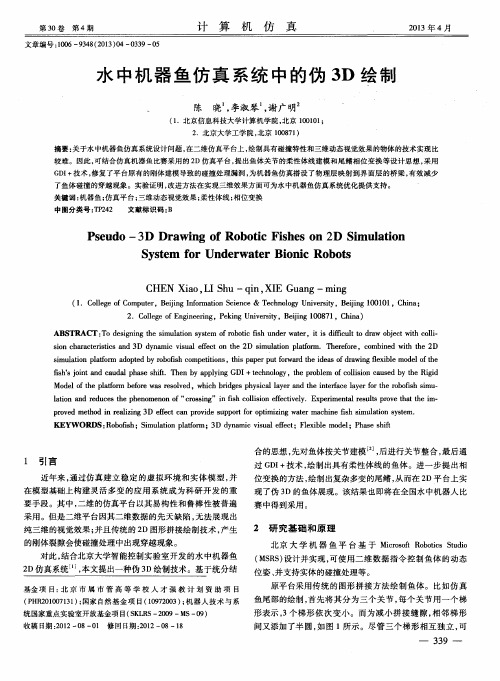
种 机器 鱼仿真 _ 地 与动 态实体 的实 时绘 制方 法 一 厶 T口场
5 5 0 ;2 4 0 6 .北 京大 学工 学 院 ,北京 10 7 ) 0 8 1
(.广 西工 学 院 电子信 息 与控 制 工程 陈 伟 ,谢 广 明 1 系 ,广 西 柳 州 ,孔 峰
摘 要 :为 了解 决水 中机 器人 竞 赛 UR GSm2 仿真 平 台 1 WP i D . 0版本 中无 法 进行 比赛 场 地 的 自适 应 缩放 ,以及 不便 于 实 时提 供碰 撞 检 测所 需 的 实体 坐标 信 息等 问题 ,提 出一 种 机 器鱼 仿真 平 台场地 与动 态 实体 的 实时 绘制 方 法 。设 计 比 赛 场地 与动 态 实体 绘 制 的 实现 思路 ,并根 据 实体 机 器 鱼 的游 动模 型设 计 仿真 机 器鱼 的 外观 及运 动 形 态 ,使 仿真 平
台 中的场 地 以及 所有 的动 态 实体 的 大 小都可 根 据 实体 机 器 鱼比 赛场 地 的尺 寸进 行 等 比例 缩放 及 显示 。 同 时,新 平 台 中还提 供 了动 态 实体 、静 态 实体 的 实时位 置信 息 , 以便 平 台 中其他模 块 的 调 用 ,并且 针对 碰 撞检 测 的需要 提 供 了各 个 实体 边 缘位 置 的 坐标数 据 。实践 结 果证 明 :该 方法 能将 实体 机 器 鱼的 比赛 场景 实时 、逼真 地表 现在 UR GSm2 WP i D
S mu a i n Plto m i lto a f r
Che e l Xi a g n Ko g F n nW i e Gu n mi g , n e g
,
( . p . fElcr n cI f r to 1 De t o e to i n o mai n& Co to g n e ig Gu n x i est fT c n lg , u h u5 5 0 , ia nrl En ie rn , a g i Un v ri o e h o o y Liz o 4 0 6 Ch n ; y