利用轨迹文件恢复模型
proe常见问题
1 如何更改模型的旋转中心(spin center)这里的旋转中心指的是在查看模型时的旋转中心,不是特征几何的旋转中心。
在ProE中,默认的旋转中心是模型的中心。
这个设置在通常的情况下是没问题的。
但在有的时候,比如输入面,几何分成两个离的非常远的两个部分时。
(一般来说有一部分是多余的或者说是没用的),查看的时候旋转就非常不方便了。
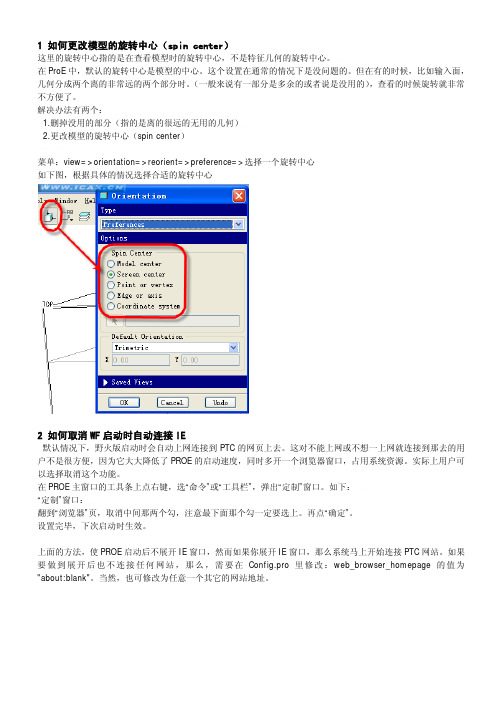
解决办法有两个:1.删掉没用的部分(指的是离的很远的无用的几何)2.更改模型的旋转中心(spin center)菜单:view=>orientation=>reorient=>preference=>选择一个旋转中心如下图,根据具体的情况选择合适的旋转中心2 如何取消WF启动时自动连接IE默认情况下,野火版启动时会自动上网连接到PTC的网页上去。
这对不能上网或不想一上网就连接到那去的用户不是很方便,因为它大大降低了PROE的启动速度,同时多开一个浏览器窗口,占用系统资源。
实际上用户可以选择取消这个功能。
在PROE主窗口的工具条上点右键,选“命令”或“工具栏”,弹出“定制”窗口。
如下:“定制”窗口:翻到“浏览器”页,取消中间那两个勾,注意最下面那个勾一定要选上。
再点“确定”。
设置完毕,下次启动时生效。
上面的方法,使PROE启动后不展开IE窗口,然而如果你展开IE窗口,那么系统马上开始连接PTC网站。
如果要做到展开后也不连接任何网站,那么,需要在Config.pro里修改:web_browser_homepage的值为"about:blank"。
当然,也可修改为任意一个其它的网站地址。
3 如何在野火里使用2001的颜色配置PTC的老用户可能会更加青睐2001的颜色配置论坛里有不少人问:如何让野火自动加载2001的颜色配置?按照下面的操作,你就可以轻松地使用2001的颜色配置,并能随意修改自己的颜色配置了1、View->Display Settings->system colors,弹出系统颜色配置对话框(图1);2、单击scheme,选择Use Pre-Wildfire Scheme,背景颜色自动修改为2001的天蓝色(图2);另外,在这里也可以自己修改颜色配置,使用自己喜欢的颜色;3、保存颜色配置,单击File->Save...,弹出保存对话框,系统默认文件名为:syscol;将文件保存到自己指定的位置(最好保存到安装文件夹里面,可以防止误删)。
CREO(trail.txt)轨迹垃圾文件的处理方法

Proe轨迹文件(trail.txt)的设置及使用方法一、Creo每一次启动都会生成一个t rail.t xt文件,用于记录用户的每一个操作,默认情况下会保存在起始位置,日积月累会变成垃圾文件,通常我们都需要清除这些文件来释放硬盘空间。
(但这些文件也不是没有用处的,我们可以通过回放轨迹文件来找回丢失的模型,遇到Creo意外关闭时尤其重要的!)首先我们可以在conf i g.pro里定义轨迹文件的保存位置,t rail_dir D:\temp,然后我们可以选择选择手动删除这些文件,或者让Cre o 每次启动自动清理之前的轨迹文件,只保留最新的一个文件。
1、新建一个tx t文档,输入如下内容,保存为bat批处理文件,这样我们每一次双击运行这个文件时就会删除D:\temp下的轨迹文件。
2、找到D:\Progra m Files\PTC\Creo 2.0\Paramet ric\bin\parametric.psf,打开后在最后增加一行R U N="D:\Creo2\bat\del.bat“这样每次启动C reo时就会自动运行前面的批处理文件,删除轨迹文件二、当系统崩溃或异常退出时,我们可以使用轨迹文件来恢复未保存的设计。
跟踪文件(trail.txt):Pro/ENGINE ER软件使用跟踪文件(trail.txt)记录整个操作行为,需要的时候还可以读入这个跟踪文件来回放你的整个操作过程。
跟踪文件的产生是自动的,每次启动Pr o/ENGINE ER软件的时候,在启动目录中会看到跟踪文件trail.txt.#出现,每启动一次,小版本号就增加一个。
如果用户不喜欢把跟踪文件放在启动目录中,可以设置系统配置文件(config.pro)选项:trail_dir,在磁盘上指定一个绝对路径。
Cero轨迹文件的使用方法
轨迹文件(trail.txt)的设置及使用方法:轨迹文件(trail.txt)的设置及使用方法当系统崩溃或异常退出时,我们可以使用轨迹文件来恢复未保存的设计。
跟踪文件(trail.txt):Pro/ENGINEER软件使用跟踪文件(trail.txt)记录整个操作行为,需要的时候还可以读入这个跟踪文件来回放你的整个操作过程。
跟踪文件的产生是自动的,每次启动Pro/ENGINEER软件的时候,在启动目录中会看到跟踪文件 trail.txt.# 出现,每启动一次,小版本号就增加一个。
如果用户不喜欢把跟踪文件放在启动目录中,可以设置系统配置文件(config.pro)选项:trail_dir,在磁盘上指定一个绝对路径。
在通常情况下,这个跟踪文件是没用的,定期清理即可。
当系统异常退出而你又没来得及存盘时候,跟踪文件也许能给你带来些惊喜。
但这种文件需要编辑修改一下才可以使用。
具体修改办法如下。
1、编辑跟踪文件首先,把trail.txt.#文件改成另外名字,去掉后面的小版本号,例如abc.txt。
这是一个纯文本文件,打开后在文件的最后删除几行信息,下图是正常退出Pro/ENGINEER软件的状态,将图示区域删除即可正常回放。
如果是异常退出,会比较复杂,须仔细查找出问题的操作行然后删除。
另外,如果上次操作中有存盘、删除版本、读入外部数据等和系统交互的作业会变得更复杂。
为了是系统更稳定,在回放跟踪文件之前需设置系统环境变量CONTINUE_FROM_OOS 的值为1或true(如何设置环境变量,前面有介绍)。
这个变量的作用是当回放的跟踪文件出现错误或与系统发生冲突时,暂停操作,等待用户响应。
用户随后可以根据实际情况做出反应,并找到跟踪文件出错的位置排除冲突或错误。
2、回放跟踪文件执行下拉菜单工具(Tools)>运行跟踪或培训文件(Play Trail/Training File)…打开先前修改好的文本文件,如abc.txt。
通过ADAMS轨迹曲线进行Creo(ProE)结构设计
通过ADAMS轨迹曲线进行Creo(Pro/E)结构设计某些零件的结构设计,需要根据零件的运动规律及其与其他零件的运动学原理进行拟合设计。
这种情况下,可以利用ADAMS对组件进行初步设计,并根据零件间的运动学原理,在ADAMS中定义各零件的位置关系和运动规律,通过ADAMS对该组件进行仿真,可以得到组件间的相对运动轨迹,再由该轨迹对原始零件进行具体结构设计。
本文以凸轮机构为例,详细介绍ADAMS轨迹曲线的形成、导出以及对该轨迹文件的修改,并介绍如何将该轨迹文件导入到Creo (Pro/e)中作为设计参考。
一、ADAMS中轨迹曲线的形成、导出。
1、ADAMS中零件的建模。
在ADAMS中进行零件建模的方法有很多,主要可以分为两类:一、在ADAMS中直接进行绘图建模,不是很方便,适合简单建模;二、在Creo等三维绘图软件中建模,将模型另存为.x_t类型的文件导入ADAMS,或者直接利用相关插件导入到ADAMS中。
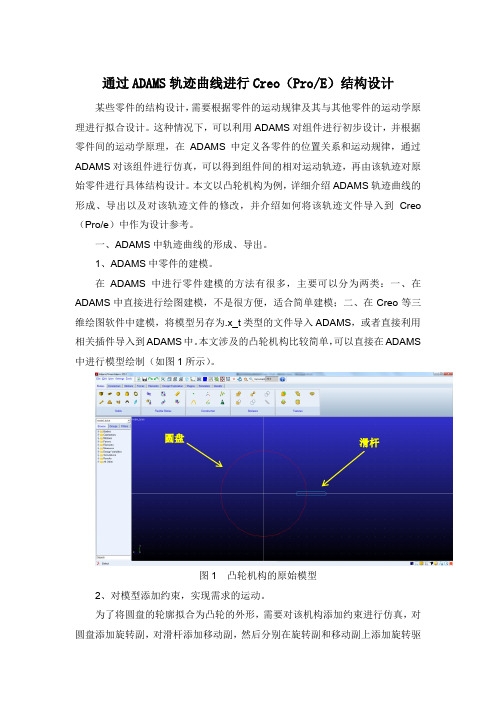
本文涉及的凸轮机构比较简单,可以直接在ADAMS 中进行模型绘制(如图1所示)。
图1 凸轮机构的原始模型2、对模型添加约束,实现需求的运动。
为了将圆盘的轮廓拟合为凸轮的外形,需要对该机构添加约束进行仿真,对圆盘添加旋转副,对滑杆添加移动副,然后分别在旋转副和移动副上添加旋转驱动和平移驱动,如图2所示。
图2 添加约束和驱动根据运动需求,凸轮以180°/s的转速旋转时,滑杆的运动规律为25sin(180°×t),故旋转驱动设置为180d*time,平移驱动设置为25*sin(180d*time),如图3所示。
图3 驱动的设置对该机构进行仿真运动,仿真时间2s,步数1000。
3、运动轨迹的形成和导出。
仿真运动结束后,点击菜单栏Result,选择Review中的轨迹,如图4所示。
图4 选择红框中的轨迹按键点击轨迹按键后,如图5所示,先选择相对运动的部件上的标记点(也可以直接创建Maker点到部件上),图中即为滑杆上的左端标记点,再选择需要重新构造轮廓的部件,图中即为圆盘,完成后就出现了滑杆左端标记点相对于圆盘的运动轨迹。
后向轨迹模型原理

后向轨迹模型原理轨迹模型是一种用于预测物体或者目标未来运动轨迹的模型。
它基于已有的运动数据和物体的运动特征,通过分析和建模来预测物体未来的位置和运动轨迹。
轨迹模型在许多领域都有广泛的应用,例如交通管理、人体行为分析、机器人导航等。
轨迹模型的原理主要包括两个方面:特征提取和轨迹预测。
特征提取是指从已有的运动数据中提取出物体的运动特征,例如速度、加速度、运动方向等。
这些特征可以通过各种传感器或者图像处理技术获取到。
轨迹预测是指根据提取到的特征,利用数学模型或者机器学习算法来预测物体未来的位置和运动轨迹。
在特征提取阶段,常用的方法包括位置差分、速度计算和加速度计算等。
位置差分是指计算物体在相邻两个时刻的位置变化,从而得到物体的运动方向和速度。
速度计算是指通过计算物体在单位时间内移动的距离,从而得到物体的瞬时速度。
加速度计算是指通过计算物体速度的变化率,从而得到物体的瞬时加速度。
在轨迹预测阶段,常用的方法包括线性模型、非线性模型和机器学习模型等。
线性模型是指基于物体的运动特征,利用线性方程来描述物体的运动轨迹。
非线性模型是指基于物体的运动特征,利用非线性方程来描述物体的运动轨迹。
机器学习模型是指利用已有的运动数据和物体的运动特征,通过训练模型来预测物体未来的位置和运动轨迹。
轨迹模型的性能主要取决于特征提取的准确性和轨迹预测的精度。
特征提取需要考虑到物体的运动特征是否能够准确地反映其运动状态,以及特征提取的方法是否能够对噪声和干扰进行有效的抑制。
轨迹预测需要考虑到模型的复杂度和适应性,以及模型的训练数据是否能够充分地覆盖物体的运动状态。
在实际应用中,轨迹模型可以用于交通管理,通过预测车辆的行驶轨迹来优化交通流量和减少交通拥堵。
它还可以用于人体行为分析,通过预测人体的运动轨迹来识别异常行为和提高安全性。
此外,轨迹模型还可以用于机器人导航,通过预测机器人的运动轨迹来规划路径和避免障碍物。
轨迹模型是一种用于预测物体或者目标未来运动轨迹的模型。
gmx traj用法

gmx traj用法GMX Traj是GROMACS软件包中的一个工具,用于处理和分析从分子动力学模拟中产生的轨迹数据。
轨迹文件包含了原子的坐标和速度信息,以及相应的时间步长。
GMX Traj提供了一系列功能,使用户能够对轨迹文件进行可视化、选择、修剪、修改和合并等操作,以便更好地理解和分析模拟过程。
在本文中,我将详细介绍GMX Traj的使用方法,并解释每个功能的作用和用法。
1. 查看轨迹文件:GMX Traj可以将轨迹文件中的原子坐标以不同的方式可视化,如球棍模型、线模型和面模型。
用户可以选择所需的可视化方式,并指定所需的时间范围。
此外,还可以对可视化进行颜色编码,以显示其他属性,如温度或原子类型。
2. 选择原子:GMX Traj允许用户根据一定的选择标准从轨迹文件中选择特定的原子或分子。
选择标准可以基于原子的位置、类型、分子标识符、速度或其他属性。
选择的结果将被存储在新的轨迹文件中,以便进一步分析和处理。
3. 修剪轨迹:有时候在模拟中的一部分是无关紧要的,或者由于内存限制而需要缩小轨迹文件的大小。
GMX Traj可以根据用户指定的时间范围、空间范围或分子类型来修剪轨迹文件。
修剪后的轨迹文件将只包含所需的部分。
4. 修改轨迹:在某些情况下,我们可能需要修改轨迹文件中的一些原子的坐标或其他属性。
例如,我们可以将轨迹文件中的溶剂原子替换为其他类型的原子,以模拟其他溶剂分子。
GMX Traj提供了修改原子坐标、速度和其他属性的功能。
5. 合并轨迹:在需要将多个轨迹文件合并为一个文件时,可以使用GMX Traj。
合并多个轨迹文件可以更好地分析和比较不同模拟条件下的结果。
合并后的轨迹文件将包含所有原子的完整模拟。
6. 计算轨迹属性:除了处理轨迹文件之外,GMX Traj还提供了一些计算轨迹属性的工具。
例如,用户可以计算相应于轨迹文件的动力学参数,如径向分布函数、配位数、自由能曲线等。
这些属性可以帮助我们更好地理解和解释模拟结果。
轨迹拟合建模方法

轨迹拟合建模方法
轨迹拟合建模方法是一种用于分析和预测物体或运动轨迹的数学模型。
它通过拟合已知的轨迹数据,以推断未来的运动趋势或预测缺失的轨迹点。
这种建模方法在多个领域中都有应用,包括机器人导航、航空航天、医学图像处理和交通管理等。
在使用轨迹拟合建模方法时,首先需要收集一定数量的轨迹数据。
这些数据可以是通过传感器测量得到的,例如GPS轨迹数据、雷达扫描数据或者运动捕捉系统的输出。
然后,通过选择适当的拟合函数或曲线模型,将轨迹数据进行拟合。
常用的轨迹拟合方法包括多项式拟合、最小二乘法、贝塞尔曲线和样条曲线等。
多项式拟合方法通过选择合适的多项式次数,将轨迹数据点拟合为一个多项式函数。
最小二乘法则是通过最小化数据点和拟合曲线之间的误差来找到最佳的曲线拟合。
贝塞尔曲线是一种通过控制点来定义曲线形状的方法,而样条曲线则是通过连接多个小曲线段来构成整个轨迹曲线。
轨迹拟合建模方法的应用非常广泛。
在自动驾驶领域,通过对已知路况的轨迹数据进行拟合建模,可以为自动驾驶车辆提供准确的运动预测和路径规划。
在运动分析领域,通过拟合运动轨迹可以帮助识别异常行为或者预测物体的未来位置。
在医学图像处理中,可以通过拟合轨迹来分析和跟踪肿瘤的生长变化。
此外,轨迹拟合建模方法还可以用于交通管理中的交通流量预测和路径优化等应用。
总之,轨迹拟合建模方法是一种重要的数学工具,可以通过对轨迹数据的分析和拟合,提供对未来运动趋势的预测和路径规划。
它在多个领域中有广泛的应用,并为各种应用场景中的问题提供了有效的解决方案。
运动轨迹自回归模型

运动轨迹自回归模型1.引言1.1 概述运动轨迹自回归模型是一种基于自回归模型的预测方法,用于分析和预测物体在运动中的轨迹。
随着社会的发展和科技的进步,对于运动轨迹的研究和预测需求也越来越大。
例如,在交通管理领域,准确预测车辆的行驶轨迹可以帮助实现交通流优化;在天气预报中,预测风向和海流的轨迹可以提高气象预报的准确性。
传统的运动轨迹预测方法主要基于数学建模或机器学习技术,但面临着一些挑战,比如数据的不完整性、噪声和复杂的运动模式。
自回归模型作为一种常用的方法,在处理时间序列数据方面具有很好的应用前景。
它基于时间依赖性,可以通过过去的数据预测未来的轨迹。
本文将重点介绍运动轨迹自回归模型的基本原理和其在预测运动轨迹中的应用。
首先,我们将介绍运动轨迹的重要性,强调其在实际生活中的广泛应用。
然后,我们将详细介绍自回归模型的基本原理,包括模型的建立和参数估计方法。
最后,在结论部分,我们将展望运动轨迹自回归模型在未来的应用前景,并对整个文章进行总结。
通过本文的阅读,读者不仅可以对运动轨迹自回归模型有一个深入的了解,还可以了解其在实际应用中的价值和潜力。
同时,本文也可以为相关领域的研究者提供一个理论基础和方法指导。
1.2文章结构文章结构部分的内容可以简要介绍以下文章的组织结构和内容安排。
文章结构部分内容示例:1.2 文章结构本文将按照以下结构进行论述:第二部分是正文,将重点介绍运动轨迹自回归模型的基本原理。
首先,我们将讨论运动轨迹的重要性,并探讨为什么需要使用自回归模型来分析运动轨迹数据。
接下来,我们将详细介绍自回归模型的基本原理,包括模型的定义、假设、参数估计方法等。
第三部分是结论,我们将探讨运动轨迹自回归模型的应用前景,并对整个文章进行总结。
通过以上结构的安排,本文将系统全面地介绍运动轨迹自回归模型的相关内容,使读者能够深入理解该模型的原理和应用前景。
接下来,我们将首先介绍运动轨迹的重要性。
1.3 目的本文的目的是介绍运动轨迹自回归模型并探讨其应用前景。
轨迹补全算法 -回复
轨迹补全算法-回复什么是轨迹补全算法?轨迹补全算法是一种在缺失或不完整的轨迹数据中预测和补充缺失部分的技术。
轨迹数据是指由一系列位置点组成的时间序列数据,通常由全球定位系统(GPS)或其他定位技术获取。
然而,由于各种原因,轨迹数据中可能会出现缺失或不完整的情况,例如GPS信号的不稳定导致部分位置点无法获取,或者用户在某些时间段内关闭了定位功能。
轨迹补全算法的目标是根据已有的轨迹数据,推测出缺失的部分轨迹,以达到完整的轨迹重建或预测的目的。
轨迹补全算法的应用领域非常广泛。
在交通领域,轨迹补全算法可以用于实时交通流量预测、行车路径推荐、车辆行为分析等。
在物流领域,轨迹补全算法可以用于货物追踪、仓储管理等。
此外,在移动应用和社交媒体中,轨迹补全算法也可以用于位置隐私保护和用户行为分析。
因此,轨迹补全算法的研究和应用具有重要的意义。
那么,轨迹补全算法是如何实现的呢?一般来说,轨迹补全算法的实现可以分为以下几个步骤。
1. 数据预处理:在进行轨迹补全之前,需要对原始轨迹数据进行预处理。
这一步骤包括数据清洗、噪声过滤和轨迹分段等操作。
数据清洗的目的是去除异常值、重复数据和无效数据。
噪声过滤的目的是降低数据中的噪声对后续分析的影响。
轨迹分段的目的是将整个轨迹划分为多个子轨迹段,以便更好地进行轨迹补全。
2. 特征提取:在轨迹补全算法中,需要从已有的轨迹数据中提取特征。
常见的轨迹特征包括位置坐标、时间戳、速度、加速度等。
这些特征可以用于描述轨迹的基本属性和变化规律,从而帮助轨迹补全算法进行预测和补全。
3. 缺失轨迹预测:在已有的轨迹数据中存在缺失部分时,需要通过预测的方式来补全缺失的轨迹。
常用的轨迹预测方法包括基于插值的方法、基于回归的方法和基于概率模型的方法。
基于插值的方法通过已有轨迹点的位置和时间信息,线性插值或曲线拟合的方式来预测缺失部分的轨迹。
基于回归的方法通过已有轨迹点的特征和时间信息,建立回归模型来预测缺失部分的轨迹。
sd animatediff的模型路径 -回复

sd animatediff的模型路径-回复Sd animatediff的模型路径可以分为以下几个步骤:第一步:了解Sd animatediff和模型路径的概念Sd animatediff是一种动画制作软件,通过使用该软件,用户可以创建精美的动画效果。
模型路径则是在动画制作过程中,用于描述物体在空间中移动的轨迹。
在该软件中,用户可以使用不同的方法和工具来创建和修改模型路径,以达到所期望的动画效果。
第二步:启动Sd animatediff并导入模型首先,要使用Sd animatediff,你需要打开该软件。
一旦软件启动,你将能够看到一个用户界面,提供了各种功能和工具来进行动画制作。
接下来,你需要导入你要使用的模型。
Sd animatediff支持导入不同类型的模型文件,如.obj或.3ds文件。
你可以在菜单栏中找到“导入”选项,并选择你的模型文件。
第三步:创建模型路径一旦你成功导入模型,你可以开始创建模型路径。
在Sd animatediff 中,你可以使用多种工具来定义模型路径。
例如,你可以使用曲线工具来创建平滑的曲线路径,或者使用自由形路径工具来创建自由形式的路径。
选择合适的工具后,你可以通过点击鼠标来绘制路径。
在绘制路径时,你可以通过调整路径的控制点来修改路径的形状。
第四步:编辑和调整模型路径创建完模型路径后,你可能需要对路径进行一些编辑和调整,以便达到预期的动画效果。
在Sd animatediff中,你可以使用编辑工具来对模型路径进行各种修改。
例如,你可以添加或删除路径上的控制点,调整路径的曲率或斜率,或者缩放或旋转路径。
通过对模型路径进行适当的编辑和调整,你可以使物体在动画中呈现出平滑、自然的移动效果。
第五步:添加其他动画效果除了模型路径之外,你还可以利用Sd animatediff提供的其他功能和工具来给动画添加更多的效果。
例如,你可以使用关键帧工具在特定时间帧上设置物体的位置、大小、旋转等属性,以实现物体在动画中的变换。
基于AIS数据的船舶轨迹修复方法研究

2021年2月第39卷第1期西北工业大学学报JournalofNorthwesternPolytechnicalUniversityFeb.Vol.392021No.1https://doi.org/10.1051/jnwpu/20213910119收稿日期:2020⁃07⁃17基金项目:绿色智能内河船舶创新专项与陕西省重点研发计划(2019ZDLGY12⁃07)资助作者简介:张黎翔(1991 ),西北工业大学博士生研究生,主要从事智能船舶与智能交通相关研究㊂基于AIS数据的船舶轨迹修复方法研究张黎翔1,朱怡安1,陆伟2,文捷3,崔俊云21.西北工业大学计算机学院,陕西西安㊀710072;2.西安财经大学信息学院,陕西西安㊀710100;3.交通运输部水运科学研究所,北京㊀100088æèçöø÷摘㊀要:针对当前海上AIS数据量持续增加并且存在较多异常点,导致基于AIS数据的船舶轨迹构建困难,提出一种基于单船自身AIS数据进行轨迹异常点识别与修复方法㊂此方法充分利用AIS数据中的经纬度㊁速度㊁加速度以及航向等参数,进行轨迹异常点判定与修复,与基于单一位置数据的异常点判定与修复方法相比,能有效减少异常点的漏判,提高AIS数据的可靠性;与基于航迹聚类的异常点判定方法相比,不需要历史航迹数据支撑,拓展了使用范围㊂而采用三次样条方法对轨迹间的断点进行插值处理,进一步提升了轨迹数据的连续性和完整性㊂实际海域船舶AIS数据处理与分析结果验证表明,所提出方法具有较高可行性和有效性㊂关㊀键㊀词:船舶自动识别系统;轨迹数据;异常点检测;轨迹修复中图分类号:TP391㊀㊀㊀文献标志码:A㊀㊀㊀文章编号:1000⁃2758(2021)01⁃0119⁃07㊀㊀轨迹大数据[1]记录移动对象随时间变化的活动情况,并客观反映移动对象个体或群体的活动规律,当前研究人员针对轨迹大数据的研究主要包括:轨迹分类与聚类[2⁃3]㊁轨迹预测[4]㊁轨迹模式挖掘[5]等㊂船舶自动识别系统(automaticidentificationsys⁃tem,AIS)通过GPS或北斗导航系统获得船舶位置㊁航速㊁航向等动态信息与船舶静态资料,并按照国际电信联盟标准通过甚高频广播对外发送㊂船舶AIS设备的普及,使AIS数据成为当前船舶交通流分析㊁海事监管㊁事故分析的主要数据来源,为船舶轨迹大数据获取㊁分析与应用提供了条件[6⁃7]㊂AIS数据报文并不具备可靠性,在受到各种障碍物和电磁干扰的情况下,AIS数据传输过程中经常会出现丢失和错误㊂并且AIS数据包中的位置数据来源于GPS或北斗等定位设备,也可能因定位设备问题而出错㊂错误的位置数据被获取进入海事或航运管理信息系统,可能使管理部门对当前海事交通状态产生误判,甚至可能对碰撞㊁触礁或搁浅等海损事故无法及时做出预判,酿成重大损失㊂针对AIS异常点的检测与修复方法的研究主要分为两大类:基于单船单航迹的方法[8]和基于航迹聚类的方法[9⁃10]㊂前者依据船舶自身位置㊁速度与航向等数据判断异常点并进行修复,其优点在于不需要航线历史数据;其缺点在于异常点判别依赖于判别模型,且大量连续位置数据丢失情况异常点修复困难,Zhang等[11]通过模型对异常点进行检测取得一定的成果,但仅当异常漂移点的平均速度超过最大速度时才视为异常点㊂后者依据大量船舶历史航迹聚类结果,判别轨迹异常点并进行修复,其优点在于不需建立单船轨迹异常点模型,其缺点在于需要以大量历史航迹数据作支撑,Rong等[12]通过聚类方法取得不错的效果,但其对聚类结果有很高要求,且未能对异常点进行修复;而这两类方法主要是针对船舶位置信息进行异常点检测与修复,并未对船舶加速和航向异常点剔除,现有方法判定异常点相对简单,且多是针对内河船舶,针对海上船舶异常点研究还有待提高,海上船舶有着类型差异大㊁尺度跨度大㊁航行自由度大㊁惯性大等特点,海上环境具有事故突发性强㊁气象环境复杂等特点㊂海上货轮与客轮具有相对固定的航行参数,航行的位置㊁速度与航向数据具有相对稳定性和平滑西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第39卷性㊂因此采用基于单船轨迹的异常点检测与修复方法具有较大优势㊂本文提出了一种利用单船自身轨迹数据进行异常点判断与修复的方法,该方法充分利用船舶的经纬度㊁速度㊁加速度以及航向数据进行异常点判定,与基于单一位置数据的异常点判定方法相比,能够有效减少异常点的漏判,且该方法不需要历史数据作为支撑,适用范围更广㊂此外采用三次样条方法对间隔性异常点数据进行剔除后的补足修复,进一步提升轨迹数据的连续性和完整性㊂1㊀船舶AIS轨迹数据异常点分类判定1.1㊀AIS轨迹表示轨迹用来表示移动对象状态随时间持续变化的信息历史,也可视为时间到状态的映射,即给定某一时刻t(tɪR+),通过一个以时间t为自变量的连续函数F,可以得到该对象在时刻t所处的状态空间㊂状态空间一般为d维向量,映射可表示为F:R+ңSd㊂设Tr表示船舶航行中的轨迹,则Tr={(s1,t1),(s2,t2), ,(sn,tn), }㊂当前研究较多的状态空间为移动对象位置向量,即平面空间中的二维坐标(x,y)㊂船舶发射的AIS位置报告报文包含经度㊁纬度㊁速度和航向等数据,为准确判别轨迹数据中的异常点,本文将船舶状态空间S表示为经度㊁纬度㊁速度和航向组成的四维向量(E,N,v,C)㊂1.2㊀船舶轨迹异常点分类判定对vtexplorer网站[14]提供的AIS原始报文分析发现,AIS报文存在转发㊁丢失㊁数据错误等原因,会导致直接根据AIS报文建立的船舶轨迹存在诸多异常点,通过分析将异常点分类并给出判定条件㊂1)异常停止点根据国际电信联盟通信标准[13]所规定的报文格式,在AIS报文发送过程中存在转发机制,接收端可能会接收到同一轨迹点的重复报文㊂重复的报文除了时间信息外,其他信息全部相同㊂另外,船舶自带定位装置在复杂环境下可能无法实时获取位置数据,从而可能导致连续一段AIS报文中位置数据相同㊂如果不对这些重复或者异常的报文进行处理,会导致误判船舶处于停止状态㊂鉴于此,可给出异常停止点判定方法为:对于AIS序列,如果第i个点的速度大于2节(1节=1海里/小时),且第i+1个点的坐标(E,N)㊁速度v㊁航向C数据均与第i个点相同,则第i+1个点为异常停止点,规则如下vi>2|Ei+1-Ei|=0|Ni+1-Ni|=0|vi+1-vi|=0|Ci+1-Ci|=0ìîíïïïïïïï(1)㊀㊀2)异常加速点根据当前船舶操纵性能设计标准,满载情况下,船舶从静止加速到设计速度的距离为船长的20倍左右;而在空载情况下,加速距离缩短到原来长度的1/2 1/3㊂船舶停车冲程受船舶排水量影响,一般为船长的8 20倍㊂据此标准,一艘船以10倍船长的距离加速到其设计速度的加速度,可作为其理论的最大加速度;以8倍船长的距离由其设计速度减速到停止的加速度,可作为其理论最小加速度㊂若设船长为L,设计速度为Vd,最大加速度为amax,最小加速度为amin,加速用时为t1,减速用时为t2,再设船舶行进过程中做匀加速或匀减速运动,则Vd=amaxˑt1=-aminˑt210L=12amaxt218L=12amint22ìîíïïïïïï(2)㊀㊀由以上关系可以求得船舶最大加速度amax和最小加速度amin为amax=V2d2ˑ10Lamin=-V2d2ˑ8Lìîíïïïïï(3)㊀㊀对于AIS序列,根据第i个点与第i+1个点的速度以及时间差,可以计算出两点之间的加速度㊂若计算所得的加速度大于最大加速度或小于最小加速度,则判定第i+1个点为异常加速点,即a=vi+1-viti+1-ti(amax-a)(a-amin)<0ìîíïïïï(4)㊀㊀3)异常漂移点理论上,移动对象在两点之间的行程可表示为速度在时间上的积分㊂对于轨迹数据序列,如果一个轨迹点与前一个轨迹点之间的距离,超过移动对象速度可达的范围,则称该轨迹点为异常漂移点㊂021第1期张黎翔,等:基于AIS数据的船舶轨迹修复方法研究设船舶在轨迹序列第i点的时刻为ti,速度为vi,在第i+1点的时刻为ti+1,速度为vi+1,则船舶在轨迹第i点和第i+1点之间的行程应为ʏti+1tivdt㊂在船舶实际航行中,根据接收到的AIS数据,只能获得船舶在2个轨迹点的速度,无法获知船舶在2个轨迹点之间的速度变化情况㊂按照最大行程情况,船舶自i点开始,应先进行最大加速,到达某时刻tm后最大减速,使得到达i+1点的速度恰好为vi+1,此时,船舶行程为smax=ʏtmti(vi+amax(t-ti))dt+㊀ʏti+1tm(vi+1+amin(ti+1-t))dt(5)㊀㊀tm满足vi+1=vi+amax(tm-ti)+amin(ti+1-tm)㊂当受到风浪及避障影响时,船舶在i点和i+1点之间的实际行程一般不是严格直线㊂因此,轨迹点i和轨迹点i+1之间的直线距离d(i,i+1)必定小于smax㊂轨迹点i和轨迹点i+1之间的直线距离d(i,i+1)可以通过2个轨迹点的经纬度坐标经计算得出㊂据此,轨迹中的第i+1个轨迹点为异常漂移点的规则为其与第i个轨迹点之间的直线距离大于smax,可表示如下d(i,i+1)>ʏtmti(vi+amax(t-ti))dt+㊀ʏti+1tm(vi+1+amin(ti+1-t))dt(6)㊀㊀4)异常转向点船舶转向能力是船舶机动性的重要参数,一般用摆动直径衡量㊂船舶设计的最大摆动直径d与船舶长度l相关,一般取2 4倍船长,即d=kˑl,kɪ[2,4]㊂若船舶速度为v,以最大摆动直径d转向,则转向速率为r=360vπkl,此时船舶从轨迹点i到轨迹点i+1的最大转向角度ωmax应为转向速率在时间上的积分,即ωmax=ʏti+1ti360vπkldtɤ360πklSmax(7)式中,smax为异常漂移点中求解的2个轨迹点之间的最大行程㊂据此,对于船舶轨迹中的一个轨迹点,若其与前一个轨迹点之间的转向角度大于ωmax,则该轨迹点为异常转向点,即|Ci+1-Ci|>ωmax=ti+1ti360vπkldtɤ360πklsmax(8)2㊀船舶AIS轨迹数据修复根据AIS数据建立的船舶轨迹是离散的时空序列㊂为了满足后续基于轨迹数据的研究与应用,需要将数据中的异常点删除,然而,异常点的删除会导致轨迹序列变得不连续;AIS报文的丢失也同样会导致轨迹序列的间断㊂故在实际应用中,需要进行同步插值处理,以获得连续轨迹㊂三次样条插值是常用的时空轨迹插值与同步方法之一,在时空轨迹数据缺失较少且间断缺失情况下,三次样条插值法具有良好的修复和同步效果㊂根据国际电信联盟通信标准[13]的规定,AIS的位置以及航行相关数据报文发送时间间隔与船只类型以及航速相关㊂对于A类船只,AIS报文发送的间隔应不大于10s;对于B类船只,AIS报文发送的间隔应不大于30s㊂在船舶正常行驶情况下,能够获取的轨迹数据比较密集,报文丢失与异常点删除可能导致的轨迹点缺失相对较少,故适合采用三次样条插值法进行轨迹点修复和同步㊂但在船舶在停泊情况下,AIS报文发送时间间隔为3min,这种情况不需插值处理;此外,船舶也可能存在主动关闭AIS电台的情况,这将导致船舶轨迹点出现较长一段缺失,此种情况下船舶的行为存在不确定性,故不适合进行插值处理㊂鉴于上述AIS报文的特点,本文仅针对删除异常点之后的轨迹数据进行分段处理,即根据轨迹点时间间隔与航速,先识别出正常航行段㊁停止段㊁和关闭电台段,分段的规则为:①AIS报文时间间隔小于3min为正常航行段;②AIS报文时间间隔大于等于3min且小于等于5min㊁航速小于1kn为停止段;③AIS报文时间间隔大于5min为关闭AIS电台段㊂轨迹数据恢复过程中,仅针对第①种情况进行三次样条插值;对于第②和第③种情况,不进行插值处理㊂在针对第①种情况进行插值时,根据不同船舶类型和航速,以AIS报文规定时间间隔作为步长进行插值㊂设AIS时空序列中有m个轨迹点,m个轨迹点对应时刻分别为ti(i=1,2, ,m),xi,yi,vi,θi分别表示轨迹点i的经度㊁纬度㊁速度㊁航向角,则经度方向速度为vxi=vicosθi,纬度方向速度为vyi=visinθi㊂以待插值序列的时间起点为零时刻,用对应的经纬度坐标作为坐标原点,对于待插值的时空序列,在经121西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第39卷度和纬度方向端点的导数,即为vxi和vyi,将vxi和vyi代入分段样条函数即可求得系数矩阵,随后即可通过分段样条函数求得每一分段内任意时刻t对应的经纬度数值㊂以船舶的经度为例,设船舶经度y(t)为时间的函数,且在时间段[ti,tj]内满足三次样条函数y(t)=aΔt3+bΔt2+cΔt+d,则vy=dy(t)dt=3aΔt2+2bΔt+c,ay=dvy(t)dt=6aΔt+2b㊂根据边界条件,在t1和t2时刻应满足y(t1)=at31+bt21+ct1+dy(t2)=a(t2-t1)3+b(t2-t1)2+c(t2-t1)+dvy(t1)=3at21+2bt1+cvy(t2)=3a(t2-t1)2+2b(t2-t1)+cìîíïïïïïï(9)㊀㊀根据待插值序列段边界值y(t1),y(t2),v(t1),v(t2)即可求得样条函数系数,确定经度y关于时间t的函数表达式,进而根据插值时间间隔,求得对应轨迹点的经度值㊂轨迹序列的其他参数(纬度㊁速度㊁航向)的插值方法与此类同,不再赘述㊂3㊀实验分析为验证本文所提出的船舶轨迹数据异常点处理与修复方法的效果,通过vtexplorer网站下载部分AIS原始数据进行实验㊂数据选择厦门港及周边水域,时间范围从2018年12月21日11时46分37秒至2019年1月3日7时30分22秒;空间范围为(117.7737ʎE,24.08784ʎN)至(118.63037ʎE,24.691ʎN),其中位置数据共12158622条,静态数据共387745条㊂实验选取1艘MMSI号为413698470的船舶轨迹数据进行分析,有14965条位置数据,时间跨度为2018年12月21日11时46分41秒至2018年12月22日23时59分50秒㊂查询该船舶静态数据可知,该船呼号为BVHW8,名称为HAIGONG167,船长32m,是1艘油船㊂3.1㊀异常点识别与剔除在不对AIS原始位置数据进行任何处理的情况下,在设定时间跨度内,该船舶的轨迹如图1(百度地图,比例尺为1ʒ50000)所示㊂从图1可以看出,根据该船原始位置数据序列建立的轨迹有些杂乱,能直观看到的是其中存在诸多异常漂移点㊂异常漂移点的存在使得部分轨迹段甚至穿过陆地,明显不具备可信性㊂若将这些船舶原始轨迹数据作为统计分析系统的数据源,将会造成统计分析结果偏离实际情况㊂这对于船舶管理与监控分析系统,将会造成错误的船舶异常行为报警㊂图1㊀船舶原始轨迹图若根据本文提出的异常轨迹点判定方法,则该船原始位置数据中存在的不同类型的异常点及其数量情况如表1所示㊂表1㊀轨迹异常点分布轨迹点数量占比/%正常轨迹点780052.13异常漂移点403526.96异常停止点00.00异常加速点120.08异常转弯点311820.83从表1该船舶异常点类型分布可以看出,异常漂移和异常转弯点所占比例较重,且该船没有异常停止点㊂主要原因可能是不存在重复转发报文情况,但也可能是本文实验下载的原始AIS数据已经处理了重复报文㊂按照本文方法,将原始数据中发现的各类异常点清除之后,该船的轨迹如图2(百度地图,比例尺为1ʒ50000)所示㊂从图2可以看出,清除异常点之后,船舶轨迹变得清晰可辨㊂221第1期张黎翔,等:基于AIS数据的船舶轨迹修复方法研究图2㊀船舶清除异常点之后轨迹3.2㊀轨迹缺失点修复在判别并删除异常轨迹点之后,虽然船舶轨迹整体变得清晰,但轨迹点时间间隔较大且不均匀,这不利于船舶局部轨迹分析与应用㊂通过静态数据可知,该船船长32m,为小型油船,属于B类船只,故对其轨迹修复过程中,按照本文第2节所给出的三次样条插值方法,以其AIS报文发送时间间隔30s进行插值处理,共插入轨迹点5419个,插入轨迹点与总轨迹点的比值为36.21%㊂数据修复前后船舶轨迹点散点对比如图3a)和3b)(百度地图,比例尺为1ʒ50000)所示㊂图3㊀修复前后航迹点对比图由图3b)可以看出,数据修复之后船舶轨迹点密度显著提高,轨迹变得更加连续,但修复之后的轨迹中仍有部分轨迹段处于间断状态,如图3b)中的圆形标识部分有一个明显缺口㊂该段轨迹没有得到修复的原因,在于连续2个轨迹点之间的时间间隔超过了5min,这表明船舶在该段处于关闭AIS设备的状态,其行为具有不确定性,故不予修复㊂本文除了对位置数据进行了异常点删除与修复之外,同样对速度异常㊁加速度异常以及航向异常等数据进行了异常点删除与修复,异常点清除与修复前后船舶部分航段的速度㊁加速度㊁航向等变化情况对比如图4至6所示(数据取自时间为2018⁃12⁃228ʒ22ʒ51至2018⁃12⁃229ʒ37ʒ45)㊂图4㊀修复前后速度对比图㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀图5㊀修复前后加速度对比图321西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第39卷图6㊀修复前后船舶转向对比图由图4至6可以看出,原始数据中超出船舶操纵性能范围的速度㊁加速度以及航向突变均已被消除㊂修复之后的船舶航速㊁加速以及航向变化趋于连续和平缓,且均在合理范围之内㊂4㊀结㊀论船舶AIS设备的普及应用,使得AIS数据成为当前船舶交通流分析㊁海事监管㊁事故分析的重要数据来源之一㊂然而AIS报文的不可靠性,给上层应用带来了困难㊂本文针对基于AIS数据的船舶轨迹构建问题,在充分分析实际船舶AIS数据异常点类型的基础上,根据AIS数据中的经纬度㊁速度㊁加速度㊁以及航向等信息,提出了一种轨迹异常点检测与修复的方法㊂其中,所提出的异常点判定方法仅需船舶自身的AIS数据,不需要历史航迹数据支撑;在剔除异常点之后,对于间断性轨迹缺失,采用三次样条插值方法对轨迹进行修复,进一步提升了轨迹的连续性和完整性㊂对实际船舶轨迹处理结果表明,本文所提出的方法能够有效识别AIS数据中的各类轨迹异常点;异常点剔除之后的轨迹插值处理效果明显,能够有效消除位置㊁速度㊁加速度以及航向的突变,经过处理之后的轨迹数据在经纬度㊁速度㊁加速度以及航向方面均处于合理范围,且变化连续平滑㊂另外,本文仅针对AIS数据间断性异常及缺失进行了处理,取得了预期效果,并且此方法具有通用性,对具有AIS数据的船舶皆可进行轨迹修复;若船舶在航行中关闭AIS设备,可能导致长时间段AIS数据缺失,在此种情况下,船舶行为具有不确定性,此类情况有待后续进一步研究㊂参考文献:[1]㊀毛嘉莉,金澈清,章志刚,等.轨迹大数据异常检测:研究进展及系统框架[J].软件学报,2017,28(1):17⁃34MAOJiali,JINCheqing,ZHANGZhigang,etal.Anomalydetectionfortrajectorybigdata:advancementsandframework[J].JournalofSoftware,2017,28(1):17⁃34(inChinese)[2]㊀ANAGNOSTOPOULOSC,HADJIEFTHYMIADESS.Intelligenttrajectoryclassificationforimprovedmovementprediction[J].IEEETransonSystemsMan&CyberneticsSystems,2014,44(10):1301⁃1314[3]㊀YUANG,SUNP,ZHAOJ,etal.AReviewofmovingobjecttrajectoryclusteringalgorithms[J].ArtificialIntelligenceReview,2017,47(1):123⁃144[4]㊀QIAOS,HANN,ZHUW,etal.TraPlan:aneffectivethree⁃in⁃onetrajectory⁃predictionmodelintransportationnetworks[J].IEEETransonIntelligentTransportationSystems,2015,16(3):1188⁃1198[5]㊀YUANG,ZHAOJ,XIAS,etal.Multi⁃granularityperiodicactivitydiscoveryformovingobjects[J].InternationalJournalofGeographicalInformationScience,2017,31(3):435⁃462[6]㊀FERNANDEZAV,PALLOTTAG,VESPEM.Maritimetrafficnetworks:fromhistoricalpositioningdatatounsupervisedmari⁃timetrafficmonitoring[J].IEEETransonIntelligentTransportationSystems,2017:722⁃732[7]㊀TUE,ZHANGG,RACHMAWATIL,etal.ExploitingAISdataforintelligentmaritimenavigation:acomprehensivesurvey[J].IEEETransonIntelligentTransportationSystems,2016,19(5):1⁃24[8]㊀吴建华,吴琛,刘文,等.舶舶AIS轨迹异常的自动检测与修复算法[J].中国航海,2017,40(1):8⁃12421第1期张黎翔,等:基于AIS数据的船舶轨迹修复方法研究WUJianhua,WUChen,LIUWen,etal.AutomaticdetectionandrestorationalgorithmfortrajectoryanomaliesofshipAIS[J].NavigationofChina,2017,40(1):8⁃12(inChinese)[9]㊀SOLEIMANIBH,DESOUZAEN,HILLIARDC,etal.Anomalydetectioninmaritimedatabasedongeometricalanalysisoftrajectories[C]ʊ201518thInternationalConferenceonInformationFusion,WashingtonDCUSA,2015:1100⁃1105[10]李佳,初秀民,刘兴龙,等.内河船舶缺失轨迹修复方法[J].哈尔滨工程大学学报,2019,40(1):67⁃73LIJia,CHUXiumin,LIUXinglong,etal.Anapproachforrestoringthelosttrajectoriesofvesselsininlandwaterways[J].Jour⁃nalofHarbinEngineeringUniversity,2019,40(1):67⁃73(inChinese)[11]ZHANGD,LIJ,WUQ,etal.EnhancetheAISdataavailabilitybyscreeningandinterpolation[C]ʊ20174thInternationalConferenceonTransportationInformationandSafety,Banff,Canada,2017:981⁃986[12]RONGH,TEIXEIRAAP,SOARESGG.DataminingapproachtoshippingroutecharacterizationandanomalydetectionbasedonaisData[J].OceanEngineering,2020,198(106936):1⁃12[13]ITU⁃RM.1371⁃5[EB/OL].(2014⁃02⁃01)[2020⁃05⁃01].http:ʊwww.itu.int/publ/R-REC/en[14]HistoricalAISDataServices[EB/OL].(2018⁃12⁃10)[2020⁃05⁃01].http:ʊwww.vtexplorer.com/,2018⁃12⁃10AdetectionandrestorationapproachforvesseltrajectoryanomaliesbasedonAISZHANGLixiang1,ZHUYiᶄan1,LUWei2,WENJie3,CUIJunyun21.SchoolofComputerScience,NorthwesternPolytechnicalUniversity,Xiᶄan710072,China;2.SchoolofInformation,Xi anUniversityofFinanceandEconomics,Xiᶄan710100,China;3.ChinaWaterborneTransportResearchInstitute,Beijing100088,Chinaæèççöø÷÷Abstract:InviewofthecontinuousincreaseintheamountofAISdataatseaandtheexistenceofmoreabnormalpoints,itisdifficulttoconstructshiptrajectoriesbasedonAISdata.Aimingatthisproblem,anewmethodfori⁃dentifyingandrepairingabnormalpointsintrajectoriesonlybasedtheAISdataoftheshipitselfisproposed.Longi⁃tudeandlatitude,speed,acceleration,directionandotherparametersarecomprehensivelyusedtoidentifyandre⁃pairtheabnormalpointsinthemethodproposed.Comparedwiththemethodsbasedonsinglelocationdata,itcaneffectivelyreducethemissedjudgementofoutliers.Comparedwiththemethodsbasedontrajectoriesclusteringtojudgesingularpoint,thismethoddoesnotrequirethedataofhistoricaltrajectoriestoexpandtheapplicationscope.Thecubicsplinemethodisusedtointerpolatepointsforthediscontinuoussegmentstofurtherimprovethecontinuityandintegrityoftheshiptrajectory.TheresultsofAISdataprocessingandanalysisonshipsinactualseaareasverifythefeasibilityandeffectivenessoftheproposedmethod.Keywords:automaticidentificationsystem(AIS);trajectorydata;anomaliesdetection;trajectoryrestoring;cubicspline引用格式:张黎翔,朱怡安,陆伟,等.基于AIS数据的船舶轨迹修复方法研究[J].西北工业大学学报,2021,39(1):119⁃125ZHANGLixiang,ZHUYiᶄan,LUWei,etal.AdetectionandrestorationapproachforvesseltrajectoryanomaliesbasedonAIS[J].JournalofNorthwesternPolytechnicalUniversity,2021,39(1):119⁃125(inChinese)©2021JournalofNorthwesternPolytechnicalUniversity.ThisisanOpenAccessarticledistributedunderthetermsoftheCreativeCommonsAttributionLicense(http://creativecommons.org/licenses/by/4.0),whichpermitsunrestricteduse,distribution,andreproductioninanymedium,providedtheoriginalworkisproperlycited.521。
HYSPLIT模式简介及使用知识分享

设置模式的起始高度为1000m,对应 本地边界层中上部
做分型时垂直高度的类型是使 用数据的分层!!!
步骤1、计算日轨迹
输入年、月、起始日、终止日(起始日和终止日一般选 择模拟日的前后几天就可以)、时间(可自己选择时段0 12 或者0 6 12 18等)
模拟的垂直分层:一般分3层
高度使用(m-AGL)100、500、 1000米高度,经纬度为气象楼前 的马路
模式运行总用时:带有‘-’表示后 向,一般不用输入,只输入时间, 选择前、后向时会自动加上‘-’。
模式模拟方向:一般使用后向模拟。
模式顶高度:10000.0m。 垂直分层:使用sigma高度分层 (也可以使用其它分层,自选)
将step3中的分型数改为4,点击Text, 得到分型结果
再使用
分别绘出平均图和分形图(输出路径和输出 选项自行调整)
结果例:平均图
分型图
将提示中选择Ignore all DSC
4、分型结果文件
点击Archive,分型结果保存在C:\hysplit4\cluster\archive中,可根据时间自行查看
3、运行轨迹分型
Ruard
输入路径,即上一步输出的文件的自建 路径 剩下路径不需要改
点击Make INFILE
然后Run cluster
最后总共的轨 迹数
重要:选择轨迹分型数
Run之后得到了可能的分型条数及变化的可能性(数值越小,变化越少,越好) 如:上图所示 19条分型变化最小,但是条数太多不易分析,因此选择4条分型 (可变性为39.93)为最佳。
下面为输入和输出文件夹。一般输 出不改,输入文件为下载的2类资 料。根据选择模拟的时间,若要做 后向轨迹,则需要上一个星期的文 件。
智能交通系统中的车辆轨迹重建与分析研究

智能交通系统中的车辆轨迹重建与分析研究智能交通系统的发展已经为城市交通管理带来了许多便利和挑战。
车辆轨迹重建与分析是智能交通系统中的核心部分之一,通过对车辆行驶轨迹进行重建和分析,可以提供有效的交通管理策略,优化交通流量,改善交通状况,提升出行效率。
本文将重点探讨智能交通系统中车辆轨迹重建与分析的研究方法和应用场景。
一、车辆轨迹重建技术1. 数据采集:智能交通系统中的车辆轨迹重建首先需要收集大量的车辆行驶数据。
现代交通管理系统通常通过交通摄像头、卫星导航系统、传感器等设备来获取车辆的位置和状态信息。
这些数据可以提供车辆的速度、加速度、行驶路径等关键信息。
2. 轨迹重建算法:在车辆行驶数据的基础上,需要应用合适的轨迹重建算法来还原车辆的行驶轨迹。
常用的轨迹重建算法包括Kalman滤波、贝叶斯网络、粒子滤波等。
这些算法可以分析车辆的运动模式和行为,并根据历史数据进行预测和推断。
3. 数据清洗和筛选:由于车辆行驶数据存在一定的噪声和错误,需要进行数据清洗和筛选。
通过去除异常数据和纠正错误数据,可以提高车辆轨迹重建的准确性和可靠性。
二、车辆轨迹分析方法1. 轨迹分类和划分:对于大量的车辆轨迹数据,可以利用聚类分析和时间序列分析方法对轨迹进行分类和划分。
通过将轨迹分组,可以发现不同类别车辆的行驶模式和特征,为交通管理提供依据。
2. 道路网络模型:通过构建道路网络模型,可以将车辆轨迹与道路网络相匹配,分析车辆的行驶路径和交通流量。
道路网络模型可以帮助交通管理者了解交通拥堵情况,合理分配交通资源,提高道路通行能力。
3. 轨迹预测与交通优化:通过对历史车辆轨迹数据的分析和建模,可以预测未来的交通状况和车辆轨迹。
基于这些预测结果,可以制定交通管理策略,优化交通信号配时,减少交通事故发生率,提高交通运行效率。
三、智能交通系统中的应用场景1. 交通安全管理:利用车辆轨迹重建和分析技术,可以实时监测交通安全事件,如交通事故、违法行为等,及时采取措施避免事故发生,并提高交通法规的遵守情况。
《路径原路返回效果》课件

Part Four
路径原路返回效果 的常见问题及解决
方案
动画效果不流畅
原因:动画设置不当,如 帧率过低、过渡效果不佳 等
解决方案:调整动画设置, 如提高帧率、选择合适的 过渡效果等
原因:硬件性能不足,如 CPU、GPU性能不足等
, 如软件版本过低、与其他 软件冲突等
加流畅自然。
路径原路返回效 果还可以应用于 动画制作,使动 画更加生动有趣。
路径原路返回效果的应用场景
导航系统:在导航过程中,如果遇到错误或障碍,可以原路返回到起点 机器人控制:在机器人执行任务时,如果遇到障碍或错误,可以原路返回到起点 游戏设计:在游戏中,如果玩家遇到障碍或错误,可以原路返回到起点 程序设计:在程序设计中,如果遇到错误或异常,可以原路返回到起点
完成设置后,点击“确定”按钮,即可完成触发器的添加 和触发条件的设置
预览并调整动画效果
打开PPT,选择需要添加路径原路返回效果的幻灯片
在幻灯片中插入需要返回的路径,如箭头、线条等
选择需要返回的路径,点击“动画”选项卡,选择“路径原路返回”动画效果 在“动画”选项卡中,可以调整动画的持续时间、速度、方向等参数,以达到满 意的效果 预览动画效果,如有不满意的地方,可以重新调整动画参数,直到满意为止
路径原路返回效果的 PPT课件
,
汇报人:
目录
01 添 加 目 录 项 标 题 03 路 径 原 路 返 回 效 果
的制作步骤
05 路 径 原 路 返 回 效 果 的优化建议
02 路 径 原 路 返 回 效 果 的概念
04
路径原路返回效果 的常见问题及解决
方案
Part One
单击添加章节标题
Part Two
轨迹补全算法
轨迹补全算法是用于在给定的轨迹数据中填补缺失部分的一类算法。
在实际应用中,由于各种原因(如传感器故障、数据传输错误等),收集到的轨迹数据可能会出现缺失。
轨迹补全算法的目的是根据已有的轨迹点,预测出缺失轨迹点的位置,从而得到一条完整的轨迹。
轨迹补全算法可以分为以下几种类型:
1. **基于线性插值的轨迹补全**:
- 这种方法假设轨迹在缺失点之间是线性变化的,通过已知的轨迹点来计算缺失点的位置。
2. **基于样条插值的轨迹补全**:
- 样条插值使用曲线(如三次样条曲线)来连接轨迹点,这种方法可以得到更加平滑的轨迹。
3. **基于滤波的轨迹补全**:
- 采用卡尔曼滤波或粒子滤波等方法,结合运动模型来预测轨迹,这种方法适用于动态轨迹的补全。
4. **基于机器学习的轨迹补全**:
- 利用机器学习模型,如神经网络、支持向量机等,根据历史轨迹数据训练模型,用于预测缺失的轨迹点。
5. **基于优化算法的轨迹补全**:
- 通过优化算法(如遗传算法、模拟退火算法等)来寻找最优的轨迹补全方案,这种方法可以考虑多种因素,如轨迹的平滑性、速度约束等。
在实际应用中,轨迹补全算法的选择需要根据具体情况来确定,如轨迹的特点、数据的可用性、补全的精度要求等。
magic轨迹数据集格式 -回复

magic轨迹数据集格式-回复magic轨迹数据集格式是一种常用的数据集格式,被广泛用于魔术和幻术领域的数据存储与分析。
它的设计目的是为了方便记录和研究魔术表演的每个步骤和其相关数据。
本文将通过一系列步骤来详细解释magic轨迹数据集格式的结构和用法。
第一步:理解magic轨迹数据集格式magic轨迹数据集格式是一种基于文本的数据格式,使用字符串和特定的标记来记录魔术表演的每个步骤。
这些标记用于描述表演中所使用的道具、技巧和动作等。
magic轨迹数据集格式通过将每个步骤的数据连续存储在文本文件中的方式来实现。
第二步:准备数据集在使用magic轨迹数据集格式之前,我们首先需要准备相关的数据集。
这可以通过使用文本编辑器创建一个新的文件并命名为数据集名称来进行。
在该文件中,我们将逐步记录魔术表演的每一步。
第三步:定义标记接下来,我们需要定义一些标记来表示不同类型的数据。
这些标记可以更清晰地描述每个步骤的内容。
例如,我们可以使用"M"来表示魔术道具,"H"表示技巧,"A"表示动作等。
第四步:记录步骤通过使用定义的标记,我们可以开始记录魔术表演的每个步骤。
每个步骤应当独自占据一行,并以标记开头,后跟具体的步骤描述。
例如,如果我们要记录使用扑克牌进行的一个抽牌魔术的步骤,我们可以按如下方式记录:“M 扑克牌,H 偷偷抽一张,A 看似将牌放回牌堆”。
第五步:添加关键信息不仅仅是步骤描述,我们还可以在每个步骤后添加一些关键信息来增加数据集的价值。
这些信息可以包括步骤的顺序编号、魔术师姓名、表演日期等。
通过这些附加信息,我们可以更好地分析和比较不同表演的数据。
第六步:保存数据集一旦我们完成了所有步骤的记录,我们可以将数据集保存为文件。
该文件的格式应为文本文件,并使用".txt"作为文件扩展名。
保存好数据集后,我们可以随时调用它来进行分析和研究。
Proe轨迹文件trail处理方法 txt

Proe轨迹文件trail处理方法 txtproe轨迹文件trail处理方法txtproe轨迹文件(trail.Txt)的设置和使用方法一、creo每一次启动都会生成一个trail.txt文件,用于记录用户的每一个操作,默认情况下会保存在起始位置,日积月累会变成垃圾文件,通常我们都需要清除这些文件来释放硬盘空间。
(但这些文件也不是没有用处的,我们可以通过回放轨迹文件来找回丢失的模型,遇到creo意外关闭时尤其重要的!)首先,我们可以使用config在Pro中定义轨迹文件的保存位置,trail_udird:\\temp,然后我们可以选择手动删除这些文件,或者让Creo在每次启动前自动清理轨迹文件,只保留最新的一个。
1.创建一个新的TXT文档,输入以下内容并将其保存为bat批处理文件,这样每次双击运行此文件时,我们都会删除D:\\temp下的跟踪文件。
2、找到d:\\programfiles\\ptc\\creo2.0\\parametric\\bin\\parametric。
PSF,打开后,在末尾添加一行run=\”这样每次启动creo时就会自动运行前面的批处理文件,删除轨迹文件二、当系统崩溃或异常退出时,我们可以使用跟踪文件来恢复未保存的设计。
跟踪文件(trail.txt):pro/engineer软件使用跟踪文件(trail.txt)记录整个操作行为,需要的时候还可以读入这个跟踪文件来回放你的整个操作过程。
跟踪文件的产生是自动的,每次启动pro/engineer软件的时候,在启动目录中会看到跟踪文件trail.txt.#出现,每启动一次,小版本号就增加一个。
如果用户不想将跟踪文件放在启动目录中,可以设置系统配置文件(config.Pro)选项:trail_uudir,指定磁盘上的绝对路径。
在正常情况下,此跟踪文件是无用的。
你可以定期打扫。
当系统异常退出而你又没来得及存盘时候,跟踪文件也许能给你带来些惊喜。
matlab还原路径

matlab还原路径路径的还原是指根据已知的信息或线索,恢复出一个事物的历程或轨迹。
在计算机领域中,路径的还原是指根据已知的数据或指令,恢复出一个程序或文件的执行过程或存储位置。
而在Matlab中,路径的还原是指根据已知的数据或模型,恢复出一个现象或过程的原始状态或变化规律。
在Matlab中,路径的还原主要涉及到数据处理和分析。
Matlab是一种用于科学计算和工程开发的高级编程语言和环境,它提供了丰富的函数和工具箱,可以方便地进行数据处理、可视化和模型建立。
通过利用Matlab的强大功能,我们可以还原出许多不同类型的路径,包括信号传输路径、数据处理路径、物理路径等等。
在信号处理中,路径的还原是指根据已知的输入和输出信号,推断出信号的传输路径或系统的响应函数。
例如,我们可以通过输入一个已知信号,观察输出信号的变化,然后利用Matlab中的信号处理工具箱,通过频谱分析、滤波器设计等方法,还原出信号的传输路径或系统的响应函数。
这样可以帮助我们了解信号的传播特性,优化系统的设计和性能。
在数据处理中,路径的还原是指根据已知的数据和处理过程,恢复出数据的原始状态或变化规律。
例如,我们可以通过采集一系列的数据,然后利用Matlab中的数据分析工具,如统计分析、回归分析等方法,找到数据的变化规律或隐藏的关联性。
这样可以帮助我们理解数据的特征和规律,发现数据中的异常或趋势,从而做出相应的决策或预测。
在物理建模中,路径的还原是指根据已知的物理模型和实验数据,恢复出物理过程或现象的原始状态或变化规律。
例如,我们可以通过建立一个物理模型,然后利用Matlab中的数值求解工具,如有限元分析、微分方程求解等方法,模拟物理过程的发展和变化。
这样可以帮助我们验证物理模型的有效性,优化物理系统的设计和运行。
Matlab的强大功能可以帮助我们还原出许多不同类型的路径,包括信号传输路径、数据处理路径、物理路径等等。
通过利用Matlab进行路径的还原,我们可以更好地理解和分析数据、系统和现象,优化设计和决策,提高工作效率和质量。
ilqr轨迹优化算法 -回复

ilqr轨迹优化算法-回复什么是iLQR轨迹优化算法?iLQR(iterative Linear Quadratic Regulator)轨迹优化算法是一种模型预测控制(MPC)算法,旨在通过迭代地线性化和求解二次规划问题来优化系统的控制轨迹。
通过不断调整输入信号,iLQR可以在每个时间步上寻找最优的控制动作,以使系统在未来的一段时间内达到最优状态。
iLQR的基本原理是系统建模和动态规划方法的结合。
它对系统动力学进行高阶近似来构造线性二次规划问题,并使用动态规划算法求解这个问题的最优解。
然后,通过组合反向传播和迭代线性化过程,iLQR可以获得最优轨迹和相应的控制输入。
iLQR的步骤如下:1. 系统建模:首先,需要对系统进行建模。
这包括定义系统的动力学方程和控制输入。
通常,系统的动力学可以通过物理定律或实验数据进行建模。
2. 初始轨迹和控制策略:根据任务要求和初始估计,选择一个初始的轨迹和相应的控制信号。
这个初始轨迹可以是基于经验的,也可以是通过其他方法生成的。
3. 线性化系统:使用初始轨迹和控制输入点对系统进行线性化,得到线性化的动力学方程。
通常,这是通过泰勒展开来实现的。
4. 回溯动态规划:从时间的终点开始,使用动态规划方法递归地向后计算成本函数和控制增量。
动态规划会在每个时间步上解决一个线性二次规划问题,以找到最优的控制增量。
5. 反向传播:根据计算的控制增量,逆向传播更新初始轨迹和控制信号。
这通过使用前一步中计算的增量来更新系统模型实现。
6. 重复迭代:重复步骤3到5直到收敛。
每次迭代都会生成一个更新的轨迹和控制策略,直到获得最优轨迹和相应的控制输入。
iLQR算法的优点是可以在非线性、多变量的系统中进行优化,同时兼顾了快速收敛和优化质量。
由于需要反复迭代和线性化系统,iLQR的计算复杂度较高。
因此,对于复杂的系统,可能需要进行有效的优化策略或并行计算来提高算法的效率。
总之,iLQR是一种有效的轨迹优化算法,通过迭代地线性化和求解二次规划问题来优化系统的控制轨迹。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用轨迹文件恢复模型
检举利用轨迹文件就是trail文件找回来不过你得熟悉trail.txt中的语句,需将语句进行取舍改造
对于复杂的零件来说要恢复很难
我试过几次
简单的可以恢复的
但是复杂的都没有恢复成功,希望你好运哈
下面是人家恢复的过程
trail文件(轨迹文件)使用技巧探讨
每次启动proe,都会产生一个新的trail文件,其命名为trail.txt.#(#为一个自然数,proe根据系统里已经存在的最新的trail文件的这个数字自动加一来作为新的trail文件后缀)。
trail文件一般保存在proe的启动目录里,如果另行设置过trail文件保存目录,则它会放在所设置的目录里。
下面来个例子:
开机、启动proe,在proe里新建了一个prt文件,画了一个圆柱,再用鼠标拖着这个圆柱转了几下,没保存。
打开任务管理器,强行关掉proe。
现在要恢复我们刚才做的工作。
怎么办?
1。
找到刚才启动proe所生成的trail文件。
打开proe启动目录,可以看到里面有很多trail.txt.#的文件,用文件修改时间排序,找到修改时间最近的那个trail文件(注:也就是后缀数字最大的那个trail文件)。
像我下图里的就是trail.txt.366这个文件是刚才启动proe生成的轨迹文件,它记录了我刚才启动proe到proe被强行关掉这段时间内,我在proe里做的每一个动作。
我们恢复数据就靠这个文件了。
2。
找到了目标,打开看看,研究一下哪些东东是有用的东东,哪些东东是没用的。
好,用记事本打开刚才的这个trail文件(上图里的trail.txt.366)。
先看它的头部,第一行是轨迹文件版本号,第二行是所用proe的版本号,每一个轨迹文件,都是以这样两行开头的。
轨迹文件版本号与proe版本号不匹配的话,是不能用的,也就是说,WF 生成的将不能在2001下用,2001生成的,将不能在2000i下用。
再下去是一些动作记录,再后面就是创建新文件、建立特征的记录了。
这些内容就是对我们有用的数据了。
3.上面的是轨迹文件的头部及中间的内容,这些东西,基本上都是对我们有用的数据(除了那些以"!"打头的行)。
我们恢复数据的希望就是这些记录了。
下面再看看文件尾部有些什么:
4.好,虽然基本上我们只在把最后几行去掉就可以了,但认真看一下trail文件的结构及记录特点,还是对我们分析数据大有好处的。
在整个trail文件中,基本上每一个行都以一个特定的符号打
头,看看这些符号代表什么意思:
(90%以上的行都以下面5个符号打头,我们知道它们是什么意思就能知道每一行都记录的是什么东东了)
5.去掉无用行,另存文件为一个文本文件(名字就随便取啦,反正别取中文的就OK了)。
好,我们把trail.txt.366的最后四个以"~"打头的行
及其中间的行都去掉,然后把文件另存为trail-1.txt。
(极度重要的一个问题:文件最后要有一个,且仅一个空行!!!!----
什么?你忘了留一个空行也行了?对,有时候是可以的。
但是你在那个空行的后面又搞了些东东的话,那就OVER了)
(注意,如果你不能判定哪些行是要去掉的,那就把原文件备份,一次次的试过来吧...........)
加:另存名也不能是trail.txt,别的英文名都可以
6.重新启动proe,点选“功能”---->“播放轨迹/培训文件”,在弹出的窗口里找到上一步另存的那个文本文件(trail-1.txt)。
确定!
好,祈祷吧!如果你上一步确实只去掉了最后几个没用行,又没有在前面的某些什么地方去“添油加醋”的话,那应该是-----proe自已在那里按照刚才我们的动作过程,做了一个我们刚才做的特征出来。
7.晕倒,我砍死你啊!都胡说什么呢,我都一步步照你说的做的,怎么proe自动做了几步就又OVER 了?
别急,重复上面的过程,找到刚才生成的trail文件(这回是trail.txt.367了)。
打开看看,再打开刚才的文本文件,看看:
新的轨迹文件里记录了失败位置,它指出刚才执行trail-1.txt时,在这个文件的第55行,出错了。
看看trail-1.txt,用^G转到第55行看看,第55行是一个双星号打头的行,它本身是没错的,那错在哪里呢?仔细看看,它的前面怎么空空的?原来它的前面多了一个空行!!!!!
这里再度提醒各位:在轨迹文件里,任何一个空行都被当作文件结束!!并且在空行后面不能再有任何内容(就算是另一个空行都不可以!)
这是一个经常出现的错误原因,只要编辑是不小心,就会这样了,所以大家处理文件时要小心才行。
如果平时粗心习惯了,那还是找你的GF来帮你做这件事好了:)
8.找到了原因,那改过来,再另存一次,重新在proe里调用它,OK,成功了。
很多时候,我们会遇到另存的文本文件在调用时不能顺利运行到我们希望的地方,这时候就要像上一步那样,打开记录了上次调用过程的新轨迹文件和所调用的文本文件,来研究到底哪里出错了。
一步步改过来,总会成功的。
补充另一种典型的“失序”错误:
当工作目录不是proe启动目录时,建了一个新文件,名字为prt0010。
而同时在启动目录里也有一个prt0010.prt.#(不论版本号是几)。
这种情况下,调用轨迹文件会失败,要先把启动目录里的这个prt0010改下名字或移走。
(如果是在启动目录下建的新文件prt0011,没保存退出后,在调用轨迹文件前又在别的地方弄了一个prt0011放在启动目录里的话,调用轨迹文件时,在生成新文件这一步不会出错,会自动把新文件名字变成prt0012)
9.上面介绍了编辑轨迹文件自动恢
复数据的一般过程。
但自动恢复时,proe都是自动重播的,有时候,我们怎么改也改不对,怎么办?放弃了重来?
那还有另一招:改自动重播为手动重播。
在config文件里,把这set_trail_single_step的值改成"yes"。
这样,在第9楼那一步里,我们什么也不要动,直接另存为trail-1.txt就行了。
然后在proe里调用trail-1.txt,这样,我们每按一下回车,proe执行轨迹文件里记录的一个动作(这个动作可是分解到很细的了,大家试试就知道了),执行完了一个动作,我们再按一下回车,就这么一步步来,到了哪一步我们觉得可以了,就恢复到这里就行了,好,那按一下“e",回车!OK,继续吧,proe已经把主动权交给你了,后面你想干嘛干嘛了!!
(这样只对恢复量比较小的情况下有用,如果数据量很大,那按回车也够累你半天了!)
下面是trail文件相关的3个config设置项:
set_trail_single_step上面已经说了
trail_delay是用来控制自动播放时的每一步之间的时间隔的,默认为0秒,如果你觉得它晃的太快,不妨改改它,注意,它的值是个以秒为单位的数字,可别搞得太大了啊。
trail_dir是设置trail文件的保存目录的,可用它指定trail文件的位置,如果不设置,那么trail 文件就在proe的启动目录里。