气动系统图
气路系统原理图(确定版本).ppt
AV71
MFC7
AV72
C
MV8
P
F8 AV81 MFC8 AV82
预留
2019/3/23
P
4
第三版
手动阀 单向阀 调压阀 压力表 过滤器 气动阀 MFC
中文名称
蝶阀 截止阀 角阀 真空计
英文名称
Throottle Vavle Gate Vavle Angle Vavle Vacumm Gauge
简写
TV GV AngV PG
2019/3/23
5
A
BFV AFV CFV
cleanroom
RPS
B Gas Box
RC
Loadlock
LLV LLMFC
RCBV
LLBV
F
N2回填
PUMP
RCAV
ABV
LLAV
PG
—
foreline
PUMP
TV BBV CBV
GV
互 锁
C — 命名规则:位置 用途 什25
2019/3/23 1
命名规则—Gas Box
什么阀 第几路 第几个阀 字母 数字 数字
8路分别为: 1,2 ,3,4,5,6,7,8
2019/3/23
2
中文名称
手动阀 减压阀 压力传感器 过滤器 气动阀 MFC 单向阀
英文名称
Manual Shutoff Vavle Regulator Pressure Vavle Pressure Transducer Fliter Air-operated Valve Mass Flow Controller Check Vavle
2019/3/23
互 锁
气动机构图例

PDF created with FinePrint pdfFactory trial version
图 9—6 小车移动装置 在图 9-6 的行程扩大机构基础上适当安装多排滑轮机构可扩大行程。在这种行程扩大 机构装置中,要使小车平稳运转是困难的。这是因为行程扩大了,小车速度比气缸速度来得 高,就要求不易低速的气缸以更低的速度运动。另外,绳索在气缸运动中的弹性伸缩也使小 车运行难以平稳。 建议采用外部缓冲减振器直接使小车减速停止, 不要用气缸内部的缓冲机 构减速。
图 9-15 阻挡机构之一
图 9-16 阻挡机构之二
PDF created with FinePrint pdfFactory trial version
图 9-17 阻挡机构之三
图 9-18 阻挡机构之四
六、水平运动机构
图 9-19 所示为最简单的四连杆水平运动机构,载荷用两根连杆 a、b 通过连杆 c 吊着, 连杆 c 在气缸的驱动下只能作平行于 1、2 运动。这种机构在吊臂 a 和 b 倾角很小的范围内, 轴销 3、4 的摩擦力极小。 图 9-20 所示机构是用于纸张、 塑料薄膜等带材机械中的位置跑偏控制装置, 导向滚筒 的一端是位置控制机构的驱动部分。 图示机构采用单作用气缸使轴承座沿吊臂 Oa 左右移动, 从而操纵滚动的位置。当气缸活塞杆伸出时,导向滚筒左移,带材向外偏移;反之,活塞杆 退回,导向滚筒右移,带材向里偏移。这种采用吊臂的水平运动机构在吊臂倾角很小的范围 内几乎没有摩擦力。
第九章
气动机构
气动自动化系统最终是用气动执行元件驱动各种机构完成特定的动作。 用气动执行元件 和连杆、杠杆等常用机构结合构成的气动机构,诸如断续输送机构、多级行程机构、阻挡机 构、行程扩大机构、扩力机构、绳索机构、离合器及制动器等等,例不胜举。气动机构能实 现各种平面和空间的直线运动、回转运动和间歇运动。采用气动机构能使机构设计简化,结 构轻巧,从最简单的气动虎钳到柔性加工线中的气动机械手,充分发挥了气动机构的特点。
气动系统的维护

图4 节流阀
单向节流阀是由单向阀和节流阀组合而成的流量控制 阀&常用于气缸调速和延时回路中&单向节流阀一般安装 在换向阀和执行机构之间进行速度控制;控制方式有出口 节流和进口节流两种&出口节流调节从执行元件出来的排 气量;进口节流是调节从换向阀出来;供给执行元件的供 气量&
图5为单向节流阀的结构图;气流沿一个方向经过节流 阀节流;反方向流动时;单向阀打开;不节流&单向节流阀 还有一种单向阀开度可调机构;见图6&一般单向节流阀的 流量调节范围为管道流量的20%一30%;对于要求能在较 宽范围内进行速度控制的场合;可采用单向阀开度可调节 的单向节流阀&
1在冷却器上积炭 ;不易清除 ; 2使诸如 O形圈等密封件膨胀和收缩 ; 3引起锈蚀 ;因为油泥的水溶液 冷凝水 是酸性的 ;酸性的 溶液容易腐蚀元件 ; 4引起电磁阀的误动作 ;金属密封时出现黏合现象 ;软密 封时 ;油泥使橡胶老化而产生误动作 ; 5堵住小孔空气通路&
为了让气动元件正常动作 ;消除油泥的不良影响 ; 可以采取如下 措施 :
气动系统的能源元件一般设在距控制、执行元件较远的压气机 站内;用管道远距离输送&近年来也有小型低噪声压缩机或增压泵设 置在控制、执行元件的近旁;实行单机单泵供给或局部加压&回转式 真空泵一般安装在控制和执行元件近旁;而喷射式真空泵一般尽量 安装在吸盘等真空执行元件附近;以减少真空容积;节省空气消耗量 &
图5 单向节流阀
图6 单向节流阀单向 阀开度可调
3方向控制阀
可分为单向型和换向型两种& 方向控制阀是气动控制回路中用来控制气体流动方向和气流通 断的气动控制元件&实现该类控制的气动元件称做方向控制阀简 称方向阀& 方向控制阀种类较多;分类方法有控制操纵方式、密封结构、阀 芯结构、阀的通路数等&方向控制阀的分类方法较多;其中比较普 遍的是按控制方式的分类& 用气压来获得轴向力使阀芯迅速移动换向的控制方式称做气压 控制&按施加压力的方式 气压控制又可分为加压控制、卸压控制 、差压控制和延时控制等& 加压控制是利用逐渐增加作用在阀芯上的压力而使阀换向的一 种控制方式&图7为 二位三通单气控截止式换向阀的结构图&该 阀采用加压控制方式& 卸压控制是利用逐渐减小作用在阀芯上的压力而使阀换向的一 种控制方法&图8为三位五通双气控滑阀的结构图&该阀采用卸压 控制方式&
第十四章-气动基本回路
第六节 延时回路
右图为延时输出回路。
左图为气缸延时返回 回路。
第七节 安全保护和操作回路
由于气动机构负荷的过载、气压的突然降低 以及气动执行机构的快速动作等原因,都可 能危及操作人员或设备的安全,因此在气动 回路中,常常需要设计安全保护回路。
一、过载保护回路
活塞杆在伸 出过程中, 系统过载时, 活塞杆立即 缩回。
用行程阀控制的单缸单往复动作回路。
下图为用阻容控制的单缸 单往复延时返回回路。
上图为用压力阀控制的 单缸单往复动作回路。
2、单缸多往复动作回路
按下带定位装置的手动 阀1:连续往复运动; 松开带定位装置的手动 阀1:下位工作,气缸停 止运动。
二、互锁回路
只有三个机动换向阀同时 动作,主控阀才能换向, 气缸才能伸出。
三、双手操作安全回路
锻压、冲压设备中必须设置 安全保护回路,以保证操作 者双手的安全。
左图为“与”回路的双 手操作安全回路。 注意: 两个手动阀的安装距离必 须保证单手不能同时操作。
1、阀2与阀3同时按 下:主控阀上位工 作,气缸伸出;
✓为获得稳定的运动速 度,气动系统多采用出 口节流调速。
2、双向调速回路
✓排气节流阀
调速回路 : 通过两个单向 节流阀或两个 排气节流阀控 制气缸伸缩的 速度。
三、快速往返运动回路
用两个快排阀实现双 作用气缸的快速往返, 可达到节省时间的要 求。
四、速度换接回路
采用二位二通 阀与节流阀并联, 由行程开关发出电 信号,控制二位二 通阀换向,改变排 气通路,从而控制 气缸速度改变。行 程开关的位置,可 根据需要选定。
五、缓冲回路
活塞快速向右运 动接近末端,压下机 动换向阀,气体经节 流阀排气,活塞低速 运动到终点。
气动行程程序控制系统图
§7-5
障碍信号的判别及消除
一、X—D线图判别障碍 线图判别障碍
1、控制信号线比它所控制的动作状态线短 、 →无障碍; 无障碍; 无障碍 2、控制信号线比它所控制的动作状态线 、 有障碍; 长→有障碍; 有障碍 3、控制信号线与它所控制的动作状态线基 、 本等长,仅多出一出头部分→滞消障碍 滞消障碍(自 本等长,仅多出一出头部分 滞消障碍 自 行消失,无需消除) 行消失,无需消除
二、串联回路——逻辑与 串联回路 逻辑与
LX1 1 LX2 2 J2 J1
LX3 3 J1 4 J4 5 图7-3 串联电路图 DFQ J2 J3
J3
J4
三、并联回路——逻辑或 并联回路 逻辑或
LX 1 1 LX 2 2 J2 5 J1 4
LX 3 3
J3 6
J1 4 J2 5
J4 7
J3 6
J4 7
LX2 J2 4,6 后退
DFQ1
J2 6
DFQ2
(a) 图7-9 气动缸往复运动回路及其操作电路
(b)
AN1 1 J1 2 AN2 3 J2 4 J1 5
LX1
J2
J1 2,5,3 前进
LX2
J1
J2 4,6,1 后退
DFQ1
J2 6
DFQ2
图7-10 先入优先电路
§7-3 障 碍 信 号
一、障碍信号的定义
m n
n
A
n是m的障碍信号
A1 A0 m
m n
A m是n的障碍信号 A1 A0 I型障碍 II型障碍
1、滞消障碍:障碍信号比控制信号出现时多存在一瞬间便 、滞消障碍:
自行消失(不需要排除,靠其自行消失 。 自行消失 不需要排除,靠其自行消失)。 不需要排除
气动系统回路图
7.回路图检查
8.仿真回路图
停止、启动、暂停、 复位、执行单步仿真、仿真至系统状态变化、下一个主题 放置元件的方法: 用鼠标把元件从元件库中拖放到绘图区域。
将n位五通换向阀拖至绘图区,双击换向阀, 修改参数。
换向阀有多种驱动方式:手控、机控、气控/电控。单击驱动方 式下啦菜单右边向下箭头可以设置驱动方式。 换向阀有最多四个工作位置,单击阀体下拉菜单右边箭头选择 图形符号,可以设置每个工作位置。 静止位置是指换向阀不受任何驱动的工作位置。只有当静止位 置与弹簧复位设置一致时,静止位置定义才有效。
工作管路用 实线表示, 控制管路用 虚线表示。
管路尽可能 画成直线, 避免交叉。
FluidSIM软件由德国Festo公司和paderborn大学联合开发,专门 用于液压和气动的软件。
单击按钮 或在“文件”菜单下,执行“新建” 命令,新建空白绘图区域,打开一个新窗口。 每个新建绘图区域都自动含有一个文件名,且可 按该文件名进行保存。 这个文件名显示在新窗口标题栏上。通过元件库 右边的滚动条,用户可以浏览元件。
ห้องสมุดไป่ตู้
选择接口标识符
在编辑模式下,当鼠 标指针移向一个接口 上时,形状变成十字 线圆点形式。按下鼠 标左键,移动鼠标指 针到另一个接口上松 开。
单击启动 仿真按钮, 软件切换 到仿真模 式,气动 回路图仿 真。
电缆和气管的颜色的含义:
颜色
含义
深蓝色
气管有气流
淡蓝色
气管无气流
淡红色
电路有电流
1工程上气动系统回路 图是以气动图形符号所 绘制的回路图分为 _______和_________ 两种表示法。
2用festo软件绘制左侧 气动回路图,并进行仿 真:
气动系统设计
气动回路的设计
1)根据执行元件的数目、动作要求画出方框图或动作
程序,根据工作速度要求确定每个气缸或其它执行元件
双稳元件
原理:有控制
信号a,气源p
从S1输出,撤
除控制信号a, S1保持有输出, 元件记忆了ห้องสมุดไป่ตู้制信号a;当有了控制信号b,则S1关闭,气源 p 从S2输出,撤除控制信号 b ,S2仍保持有输出。
逻辑符号:图b)
气动系统设计
气动基本回路是组成气动控制系统的基本单元,也是设计 气动控制回路的基础气动基本回路分为压力控制、速度控 制和方向控制基本回路。
在一分钟内的动作次数。
2)根据执行元件的动作程序,按本节气动程序控制回 路设计方法设计出气动逻辑原理图,然后进行辅助设计, 此时可参考各种基本回路,设计出气控回路来。 3)使用电磁气阀时,要绘制出电气控制图。
表气动控制方案选择比较
气阀控制 压力(Mpa) 元件响应时间 信号 传递速度 输出功率 流体通道尺寸 耐环境影 响的能力 耐部干扰能力 配管或配线 0.2~0.8 较慢 较慢 大 大 防爆、较耐振、耐灰尘、较耐潮湿 不受辐射、磁力、电场干扰 较麻烦 逻辑元件控制 0.01~0.8 较快 较慢 较大 较大 电--气控制 直动式0~0.8 较慢 最快 大 大 易爆和漏电 受磁场、电场、辐射干扰 容易 先导式0.2~0.8
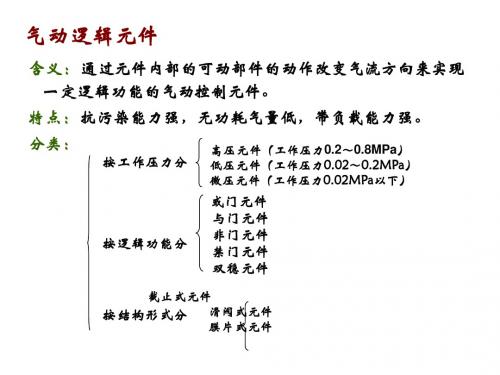
或门元件 与门元件 非门元件 禁门元件 双稳元件
截止式元件 滑阀式元件 按结构形式分 膜片式元件
气动技术第六讲-气动图形规范
• 1)数字命名
供气系统:
0
各个工段或控制部分的编号: 1,2,3等
工作元件:
1.0,2.0等
• 控制元件
.1
介于控制元件和工作元件间的元件 .01,.02等
对气缸前向冲程有作用的元件 .2,.4等
对气缸回程有作用的元件
.3,.5等
5 气动回路中元件的命名
• 2)字母命名在英文字母命名中,大写字母表示执行元件,小写字母表示信号元件。 A ,B,C 等代表执行元件
a1,b1,c1等代表执行元件在伸出位置时的行程开关 a0,b0,c0等代表执行元件在缩回位置时的行程开关
感谢下 载
ቤተ መጻሕፍቲ ባይዱ
4 气动位移-步骤图
位移-步骤图描述了控制 系统中执行元件的状态 随控制步骤的变化规律 。 图中的横坐标表示步骤 ,纵坐标表示位移(气 缸的动作)。 如A、B两个气缸的动作 顺序为:A+B+B-A-。( 注:A+表示A气缸伸出, B-表示B气缸退回),则 其位移—步骤图如图6- 6所示。
5 气动回路中元件的命名
4)阀门的控制方式
5)执行元件符号
6)开关元件
7)压力控制阀
2 控制流程图的绘制
气动系统的结构及其信号流程图 1、能源 2、输入元件(传感器) 3、处理机构(处理器) 4、执行机构(执行器)
控制流程图
3 气动回路的绘制
1、气动回路的图形表示法 工程上,气动系统回路图是以气动元件图型符
号组合而成,学员应对前述所有气动元件的功能 、符号与特性熟悉和了解。
,就在标记上加一个箭头;(如图6-3) • 图中每个元件处于控制的初始位置。已经被启动而动作的
元件用带阴影线的凸起部分或箭头加以区分;(如图6-4 ) • 在画管道线时尽可能用直线,不要交叉,连接处用一个点 表示。(如图6-5)
气动阀的气动原理图

气动阀的气动原理图气动阀是一种利用气动装置控制介质流动的自动阀门,广泛应用于石油、化工、冶金、电力等工业领域。
气动阀的气动原理图是指气动阀的工作原理和结构示意图,通过这一图示可以清晰地了解气动阀的工作方式和内部结构,帮助人们更好地理解和使用气动阀。
气动阀的气动原理图主要包括气动执行机构、阀体、阀芯、气源接口等部分。
气动执行机构是气动阀的动力来源,通过气源压力的作用,驱动阀芯的运动,从而实现阀门的开启和关闭。
阀体是气动阀的主要部件,负责容纳阀芯和介质流通的通道,阀芯则是控制介质流动的关键部件,通过阀芯的上下移动,实现介质通道的开启和关闭。
气源接口则是连接气源管道的接口,将气源压力传递给气动执行机构,从而驱动阀门的运动。
在气动阀的气动原理图中,气动执行机构通常采用气缸和气动执行器两种形式。
气缸是一种利用气源压力推动活塞运动的装置,通过气缸的伸缩运动,驱动阀芯实现开启和关闭。
气动执行器则是一种利用气源压力推动活塞或膜片的装置,通过活塞或膜片的运动,驱动阀芯实现开启和关闭。
两种形式各有优缺点,可以根据具体的工作环境和要求选择合适的气动执行机构。
除了气动执行机构,气动阀的气动原理图中还包括阀体和阀芯的结构示意图。
阀体通常采用铸造或焊接工艺制成,具有良好的耐压和耐腐蚀性能,通过阀体内部的通道,实现介质的流通和控制。
阀芯则是阀门的关键部件,其结构和材质直接影响阀门的密封性能和使用寿命,通常采用不锈钢或合金材料制成,具有良好的耐磨和耐腐蚀性能。
在气动阀的气动原理图中,还需要清晰标注气源接口和控制接口的位置和连接方式。
气源接口通常采用螺纹连接或法兰连接,通过气源管道将气源压力传递给气动执行机构,从而驱动阀门的运动。
控制接口则是连接控制系统的接口,通过控制信号控制气动执行机构的运动,实现阀门的远程控制和自动化操作。
总的来说,气动阀的气动原理图是气动阀的工作原理和结构示意图,通过这一图示可以清晰地了解气动阀的工作方式和内部结构,帮助人们更好地理解和使用气动阀。
气动阀门控制原理图

气动阀门控制原理图
如下是一个简化的气动阀门控制原理图:
(图中各部分无标题标识,仅有图示,文中无重复标题相同的文字)
1. 气动阀门主体部分:包括阀门本体和气动执行机构。
阀门本体用于控制流体的通断和调节。
气动执行机构通过接受控制信号来控制阀门的开启和关闭。
2. 控制信号源:产生控制气压信号的装置,可以是手动操作的开关或自动控制系统中的控制器。
控制信号的大小和方向决定了气动执行机构的工作状态。
3. 电磁阀:通过产生电磁力控制气路的开启和关闭,将控制信号传递给气动执行机构。
通常,电磁阀与控制信号源连接,当接收到控制信号时,电磁阀打开或关闭,以调节气动阀门的开闭程度。
4. 压缩空气源:提供气压源以驱动气动执行机构。
压缩空气源通常与气动执行机构通过一条气管连接。
5. 作动筒:气动阀门的核心部分,通过接收控制信号并将其转化为机械运动,驱动阀盘完成通断或调节操作。
6. 弹簧:提供反向力以使阀门保持在关闭状态。
当控制信号作用于气动执行机构时,打破弹簧的力平衡,阀门打开。
7. 气动阀门的输入和输出口:连接流体管道的接口,控制气动阀门的流体进出口。
根据实际需要,输入口可以是一个或多个,以满足流体管道的分支和合流要求。
请注意,上述原理图仅为概念示意图,实际的气动阀门控制系统可能因具体应用而有所不同。
汽机系统图(重要)

M
(公用)
(公用)
P
至 油 净
化
汽
(#4机有)
侧
M
真
空
汽泵前置泵密封及冷却水
汽水取样 电泵密封 电泵润滑 电泵电机 电泵前置
冷却水 及冷却水 油冷油器 冷却器 泵密封水
抗燃油冷油器
至
油
泵 冷
(公用)
氢侧密油冷却器 空侧密油冷却器
净 大机冷油器 化
M
却
(#3机有)
器
(#4机接自 TT 及
LT
放气门前管道)
至3B循泵
蓄蓄 能能 器器
电磁换向阀 3MPa SP2
3B蝶阀
4A冷却水泵
水滤网
头
LT
LT M
M
16MPa
PI
电液换向阀
M PI
M
4A 4A
4A
闸拦
旋
板污
转
槽栅
滤
网
LT
至4A循泵
LT
LT M
M
4B 4B
4B
闸拦
旋
板污
转
槽栅
滤
网
LT
至4B循泵
SP1 14MPa
油箱
溢流阀 16.5MPa M 轴向柱塞泵
8B低压加热器
PT
MP M
至水室真空泵
PT
TT
疏 凝汽器A
TI 水
扩 (低背压)
TI
容
器
PI
A
LI PI
热井
至三级 至低旁 减温器 减温器
至低旁 减温器
至三级 减温器
P
P
凝汽器B
疏 TT
PT
纯气动控制系统_图文
三.常见的逻辑阀
1.单向控制阀(单向阀):自行车打气,气门心就是单向阀。 2.或阀(梭阀) (1) 工作原理 (2) 图形符号(中间称之为“死点”)
(3) 应用:逻辑回路和程序控制回路中被广泛应用。 3.与阀(双压阀) (1) 工作原理 (2) 图形符号
三.常见的逻辑阀
4.延时阀 (1) 作用:使阀芯换向延时
振动料桶设计
振动料桶设计
分析回路
气缸从伸出到位的位置回缩,离开 1.9后,1.1中的 12口没有控制气体,但是 由于,双气控换向阀具有记忆功能,所以 气缸继续回缩;
回缩到1.7,继续气缸继续回缩
出动到1.2时,14口有气体,1.1换到左位
气缸伸出,在1.2-1.7之间往复运动
当延时阀延时一段时间t=10秒后,气缸停止运 动,最终停止在伸出到位的位置。
箱体夹紧机
热片焊接机
两个双作用气缸一起装在电加热 的闸板上,推压闸板将二块热塑板片 焊接在一起。板片的厚度范围是 1.5mm至4mm,接缝长度可以任意。 两气缸的活塞压力用压力调节阀限制 为p=400KPa=4bar。 按下间接启动按钮开关,两气缸在排 气节流下平行前向运功。为了便于调 节,在气缸和节流止回阀之间接了压 力表。气缸的两端位置都安有行程开 关,压下时间t=1.5s后,闸板返回初始 位置。用另一个按钮开关也可使气缸 立即回程。两缸动作顺序
空气制动与气动系统原理图
29/1
LC1滤尘器 ZD1遮断阀 ZJ1中继阀 ZD1遮断阀
109E分配阀
MSP123 LC1滤尘器
均衡管
均衡风缸4升 °3升 容积室1.8
紧急室1.5升 局减室0.6升
列车遮断管 作用管
单缓管
11L 30/1 工作风缸
15/5
制动缸管 列车管
2 13
28/1
31/1
(3bar) 11/7
11/6
单缓
紧急 均衡 主辅
总风 作用
E
6/3
33/1 34/1
4/5
F
6
7
8
9
10
11
12
13
14
15
16
O25x2 O15x1.5 O15x1.5
O25x2
1/1
6c0c0m
\U+03A618X1.5
1/2
600 ccm
\U+03A618X1.5
13
作业系统
20
2/1 3/1
(1bar) 11/1
5/1
18 PD55349-001
集水杯-1/2
1
40079234
17 PD56349-000
油雾器-1/2
1
40079239
16 4341001220
顺序阀
1
40078972
15 PA500305
放风塞门
6
40080363
14 100L-Φ426
100L风缸
2
23004837
13 FF-160-AAA
压力控制器
图号
XCDW32Ⅱ-50-01-00
标记 处数 更改文件号 签名
气动部分
s 300 v= = = 375(mm / s ) t 0.8
按表选取负载率为 μ=0.5 理论输出力为
450 F0 = = = 900( N ) η 0.5
由双作用气缸推力计算公式得双作用气缸缸径为 4 F0 4 × 900 D= = = 47.9( mm ) πp π × 0.5
F
故选取双作用缸的缸径为50 mm。
气动人工肌肉
气动人工肌肉是一种体积小巧、柔软、重量轻、工作简单、 容易控制的仿生学产品,它由压缩空气驱动作推拉动作, 其过程就像人体的肌肉运动。气动人工肌肉具有变刚度特 性 ,它的刚度可通过控制橡胶管内的气压实现 ,调节管内气 压的大小就可改变肌肉的刚度 ,它的刚度大小决定肌肉的驱 动力
第14章 气动控制元件与基本回路 章
W W
W
提提 负 载 力
夹夹
水水水水
F=µ W
水水水水
F=µ W
F=W
F =K(夹夹力)
取取取取取 µ =0.1~0.4
取取取取取 µ =0.2~0.8
负载率的选取与负载的运动状态有关
例题】用气缸水平推动台车,负载质量m=150kg,台车 【 例题 】 用气缸水平推动台车 , 负载质量 , 与床面间摩擦系数µ=0.3,气缸行程 与床面间摩擦系数 ,气缸行程L=300 mm,要求气缸 , 的动作时间t=0.8s,工作压力 试选定缸径。 的动作时间 ,工作压力p=0.5MPa, 试选定缸径。 解 轴向负载力为 F=µmg=0.3×150×9.8=450 (N) × × 气缸的平均速度为
图(a)所示为FESTO平行气爪,平行气爪通过两个活塞工作,两个气爪对 所示为FESTO平行气爪,平行气爪通过两个活塞工作, FESTO平行气爪 心移动。这种气爪可以输出很大的抓取力,既可用内抓取, 心移动。这种气爪可以输出很大的抓取力,既可用内抓取,也可用于外抓 取。 抓取力大, 图(b)所示为FESTO摆动气爪,内外抓取400摆角 ,抓取力大,并确保抓 所示为FESTO摆动气爪,内外抓取40 FESTO摆动气爪 取力矩始终恒定。 取力矩始终恒定。 图(c)所示为FESTO旋转气爪,其动作和齿轮齿条的啮合原理相似。两个气爪 可同时移动并自动对中,其齿轮齿条原理确保了抓取力矩始终桓定。 图(d)所示为FESTO三点气爪,三个气爪同时开闭,适合夹持圆柱体工件及工 件的压入工作。
气动技术原理及实操基础
4
(过滤器+减压阀),油雾器
过滤器,减压阀,油雾器
1. 空气过滤器
过滤器主要过滤固体杂质及水,有手动及自动 排水两种,滤芯材料主要是用树脂或铜。
5
2.减压阀
减压阀有活塞或膜片结构,输出压力作用在活塞或膜片上,克服 可调弹簧力使平衡。
用调整螺钉调节二次压力,设定弹簧加载将主阀打开,让气流从 初始压力p1输入口到二次压力p2的输出口。
空气过滤器新型号如: AF20-02D 2000----流量750,02接口大小,D自动排水
过滤器带调节阀:由以上两者合成在一起(整体,非 螺纹连接)。新型号如:AW40-04
15
6.型号认识(自学)
油雾器与油雾过滤器: 必须分清两者的区别:油雾器是在过虑器后往空气内
加油以润滑阀及气缸;油雾分离器是进一步把压缩空 气从压缩机带来的微量油再分离出来。
17
二、气缸
分类: 单作用气缸,双作用气缸,无杆气缸,带锁气
缸,旋转气缸,带导柱气缸等。
常用直线气缸材料及结构分:分铝合金气缸、 拉杆气缸、薄型气缸等。
18
1.气缸的装配图及原理
19
1.气缸的装配图及原理二
20
2.气缸的出力
气缸的出力大小: 常规气缸最大推力F=3.14*D²*P/4 气缸的拉力: F=3.14*(D²-d²)*P/4 负载率:推荐高速50%,中低速70-80%
23
3.气缸的密封,与检查方法。
1、活塞的密件 2、活塞杆的密封 3、导向件 4、密封的使用寿命与安装
24
4.气缸的气缓冲装置原理与调节
缸的气缓冲的作用是:在气缸活塞运动到接 近气缸端盖时,通过调节节流孔大小的方式 减慢气缸排气端的排气速度,来降低活塞的 速度,防止活塞撞击端盖,保护气缸。