基于LabVIEW的车位管理系统实训设计方案
车位管理系统课程设计模板
车位管理系统课程设计模板一、课程目标知识目标:1. 学生理解车位管理系统的基本原理与功能,掌握相关的概念,如数据录入、查询、统计等。
2. 学生掌握利用编程语言(如Python)实现简单车位管理系统的基本方法。
3. 学生了解数据库的基础知识,并能够运用到车位管理系统中进行数据存储与检索。
技能目标:1. 学生能够运用所学知识设计并实现一个车位管理系统,具备基本的编程能力。
2. 学生通过实践操作,培养解决问题的能力,提高逻辑思维能力。
3. 学生能够运用团队协作工具,进行项目分工与协作,提高团队协作能力。
情感态度价值观目标:1. 学生培养对信息技术学科的兴趣,激发学习编程的热情。
2. 学生在项目实践中体会团队合作的重要性,培养合作精神。
3. 学生认识到编程在解决实际问题中的价值,增强学以致用的意识。
课程性质:本课程为信息技术学科课程,结合编程、数据库等知识,以项目实践为主,培养学生的动手操作能力和团队协作能力。
学生特点:学生处于八年级,已具备一定的信息技术知识基础,对编程有初步了解,具有较强的学习能力和好奇心。
教学要求:教师应注重理论与实践相结合,引导学生运用所学知识解决实际问题,关注学生的个体差异,提供个性化指导,以提高学生的综合素质。
通过课程学习,使学生在知识、技能和情感态度价值观方面均取得具体的学习成果。
二、教学内容本课程教学内容主要包括以下几部分:1. 车位管理系统概述:介绍车位管理系统的基本概念、功能及在实际生活中的应用。
2. 编程语言基础:回顾Python编程语言的基本语法,如变量、数据类型、条件语句和循环语句等。
3. 数据库知识:讲解数据库的基本概念,如表、记录、字段等,以及SQLite 数据库的使用。
4. 车位管理系统设计与实现:- 界面设计:学习使用Tkinter库设计车位管理系统的界面。
- 功能实现:利用Python编程,实现车位录入、查询、统计等功能。
- 数据库操作:运用SQLite数据库进行数据存储、查询与更新。
电子教案《基于LabVIEW的应用程序设计》(李晴 钱声强)ppt KC10122002-c01-简易停车场管理系统硬件设计
串口通讯协议
停车场 管理
• 波特率19200bps,8位数据位,1位起始位,1位停止位,无校验。 • 命令帧格式:
• //(第一字节10代表帧头) • //(第二字节代表机器地址) • //(第三字节发送时是命令;返回时是数据长度)
5
读/写机器号
停车场 管理
• 读机器地址(GetMacNo)
发送命令: 10 FF
04
46 61 69 6C (‘Fail’)
With UID
发送命令: 10 FF 72 (‘r’) UID (8byte)
正确返回: 10 FF 05
加锁状态 (1byte)
错误返回: 10 FF 04
46 61 69 6C (‘Fail’)
block number (1byte) BlockData (4byte)
蜂鸣器BELL控制
9
读块
停车场 管理
• 读取一个Block (Read a block) Without UID
发送命令: 10 FF 正确返回: 10 FF 错误返回: 10 FF
52 (‘R’) block number (1byte)
05
加锁状态 (1byte) BlockData (4byte)
Without UID
发送命令: 10 FF 4C (‘L’) block number (1byte)
正确返回: 10 FF 04
44 6F 6E 65 (‘Done’)
错误返回: 10 FF 04
46 61 69 6C (‘Fail’)
With UID
发送命令: 10 FF 正确返回: 10 FF 错误返回: 10 FF
6C (‘l’) 04 04
LabVIEW在智能停车系统中的应用优化停车流程管理

LabVIEW在智能停车系统中的应用优化停车流程管理智能停车系统是近年来发展迅猛的一项应用技术,它通过自动化的方式提高停车管理效率,解决城市停车难题。
在智能停车系统中,LabVIEW作为一种重要的编程平台,可以发挥关键作用,优化停车流程管理。
本文将介绍LabVIEW在智能停车系统中的应用,探讨其在优化停车流程管理方面的特点和优势。
一、智能停车系统的需求和挑战智能停车系统旨在提供高效便捷的停车服务,但同时也面临着一些挑战。
停车场资源有限,车辆流量大,如何合理安排停车位和管理停车流程成为重要的问题。
传统的停车管理方式容易导致拥堵、停车位浪费等问题,严重影响了停车体验和城市交通运行效率。
因此,需要一种能够提供实时监控和控制的智能停车系统,以满足人们多样化的停车需求。
二、LabVIEW在智能停车系统中的应用1. 车位检测与导航智能停车系统中,首先需要实时监测车位的使用情况,并将这些信息反馈给用户。
LabVIEW可以通过图像处理和传感器技术,实现对停车场车位的检测。
通过这些检测数据,系统可以快速准确地判断停车位的可用性,并将空位信息通过导航界面展示给用户,帮助用户快速找到空余车位。
2. 车辆进出管理LabVIEW可以实现车辆的进出管理及识别,提供自动化的停车场入口和出口控制。
通过车辆识别、车牌识别等技术,系统可以有效管理停车场内外车辆的流动,避免非法停车和堵车情况的发生。
同时,对于有权限的车辆,可以通过LabVIEW实现自动识别,无需停车券或者身份验证,提高停车速度和便利性。
3. 停车场管理与出入口监控LabVIEW可以实现对停车场的全面管理和监控。
通过传感器和摄像头等设备,实时监测停车场的车辆流量、车辆停放信息等数据。
通过这些数据,可以进行智能调度停车位,合理安排停车车辆,减少拥堵和浪费。
同时,还可以实现对出入口通道的监控,确保停车场的安全性和秩序。
4. 数据分析与优化LabVIEW还可以通过数据分析技术,对停车场的使用情况进行深入的研究。
人机交互实验报告- 停车场管理系统
停车场管理系统一、实验目的和要求1. 实验目的(1) 熟悉图形用户界面的设计原则(2) 利用一种设计工具完成图形化的用户界面设计(3) 熟悉可用性评估的基本方法2. 实验要求(1) 采用OVID方法进行系统分析及层次结构设计,并记录全过程,;(2) 完成本实验要求的界面设计,体现界面设计的一般原则;(3) 进行可用性评估,不断完善;(4) 撰写本实验的实验报告。
二、实验仪器和设备微型计算机 + Win7 + Visual Studio + Visio + SQL Server + ……三、实验过程A.说明:(1)设计开发者在设计开发的时候都要搜集用户需求并记录分析,不断修改完善停车场管理系统的界面设计;(2)用户负责提出合理化需求和建议,并评估系统的可用性。
分工:(1)设计开发者:张海权;(2)用户:吴跟强B.停车场管理系统界面设计部分:1.概述部分:为了更好的管理停车场,实现相关功能,体现人机交互的特点,本人从用户角度出发,和设计开发者不断的交流,完善停车场管理系统,从而更好的实现停车场的界面设计。
2.停车场提出需求:(1)信息需求。
车场的信息主要有车场名称,车位总数,空车位数,停泊位数,预约位数。
车辆列表(车牌号,车位,累积小时)。
车场中每个车位区的车位图,每个车位区的空车位的状态。
例如:某停车场有200个车位,当前空车位192,停泊位数7,预约位数1,……(2)显示需求。
车辆出场时,面板显示车辆车牌号码,入场日期和时间,以及累计时间,并显示计时收费金额,系统支持打印发票。
车辆入场或预约入场时,要记录车牌号码,入场日期,入场时间,预约时长等,并指定车位。
操作员可以根据区位,来选择查看车位图(A区~J区),有车和空车位用不同的符号表示,并在车位区状态栏上显示数量。
面板显示全部车辆列表,并可查询检索车辆。
例如:值班员张小刚正在处理2016年6月12日入场的车辆“苏A0909X”,该车入场时间是10:32,累计时间1.2小时,计时收费6.0元,使用A05车位,A车位区状态栏自动显示该车位置信息,以及所在车位区4个位有车,20个位是空车位,……2.1自身充当用户角色分析该系统的用户为偶然型用户(需停车在停车场的用户),既不需要计算机应用领域的专业知识,遍布各种年龄层次、文化背景、职业特征和爱好等。
基于Labview的智能停车系统的设计方案

基于Labview的智能停车系统的设计方案
基于Labview的智能停车系统的主要目标是设计并实现一个基于Labview技术的停车场管理系统。
结合实践,使用MYDAQ数据库管理系统来完成Labview 的停车场管理平台。
实现模拟用户刷卡入库登记和管理,并自动计费以及停车场管理员应对特殊情况能控制闸门开关,查看停车场车位是否被占用状况,并通过Labview智能停车系统上进行实时发布,也可以通过Labview智能停车系统对区域内的停车场的车位进行查询、充值和支付。
本次设计是基于Labview的智能停车系统的设计,利用Labview技术实现智能化的管理。
此次设计将平台用户和系统管理员分开管理。
Labview智能停车系统平台用户的权限:
1)在Labview智能停车系统上注册(用户名不可重复,一个ID号只能绑定一个用户)。
2)登陆后查看停车场车位的实时情况,如某个车位是否被预约、是否被占用,停车场是否已满。
3)可对指定车位进行预约(若不指定则由系统分配)、取消预约、充值和支付、查看余额。
4)可查看用户在本停车场的进出、预约、车费支付情况等记录,支持通过条件检索查询。
系统管理员的权限:
1)在Labview智能停车系统上注册
2)登陆后查看停车场车位的实时情况,如某个车位是否被预约、是否被占用,停车场是否已满。
3)可查看所有用户在本停车场的进出、预约、车费支付情况等记录,支持通过条件检索查询。
4)可查看停车场所有车位的实时环境情况。
5)应对特殊情况对某个车位闸门的开关控制。
1。
基于LabVIEW的车位管理系统实训设计方案

基于LabVIEW的车位管理系统实训设计方案李福新;白勇民;李灵【摘要】本文基于NI-cRIPO 9025可编程控制器,通过反射式红外光电传感器和触发按钮模拟停车场车辆的出入和泊位信息,利用LabVIEW可视化程序对整个过程进行数据采集和状态监控.整体设计简洁明了,可作为传感器和电子技术课程的综合实验实训项目应用于高职专业课程的实践教学.%In this paper,NI-cRIPO 9025.Programmable controller based on,through the reflection type infrared photoelectric sensor and a trigger button simulation parking field vehicle access and parking information using LabVIEW which is a visual program data acquisition and monitoring of the entire process. The whole design is concise and clear,and it can be applied to the practical teaching of the comprehensive experiment and training project of the sensor and the electronic technology course.【期刊名称】《电子测试》【年(卷),期】2016(000)006【总页数】2页(P9-10)【关键词】智能停车场;LabVIEW;可编程控制器;红外传感器【作者】李福新;白勇民;李灵【作者单位】天津中德应用技术大学,天津,300350;天津中德应用技术大学,天津,300350;天津中德应用技术大学,天津,300350【正文语种】中文随着城市车辆保有量的不断增大,停车问题日益突出,无论是公共场所停车场还是小区停车泊位越来越紧张。
210973588_基于单片机与LabVIEW的自动泊车系统设计与实现

计算机测量与控制!"#""!$#!%""!!"#$%&'()'*+%('#',&-!",&(".!!#"#$!#收稿日期 "#""#*"'$!修回日期 "#""#-"*%基金项目 国家自然科学基金资助项目!(%*'$"%("$陕西省自然科学基础研究计划资助项目!"#"#,Y+*)&"$陕西省重点研发计划项目!"#"%>a+#(("%作者简介 袁子阳!%&&("&男&陕西西安人&硕士研究生&主要从事智能优化方向的研究%熊福力!%&'*"&男&黑龙江肇东人&博士&副教授&硕士生导师&主要从事人工智能与系统优化方向的研究%引用格式 袁子阳&熊福力!基于单片机与D?U b0^<的自动泊车系统设计与实现(,)!计算机测量与控制&"#""&$#!%""*"#$"%#!文章编号 %('%*-&) "#"" %"#"#$#)!!./0 %#!%(-"( 1!2345!%%6*'(" 78!"#""!%"!#$%!!中图分类号 9:"'$!!文献标识码 ;基于单片机与=*?L H R T的自动泊车系统设计与实现袁子阳 熊福力!西安建筑科技大学信息与控制工程学院&西安!'%##--"摘要 为解决狭小空间内的停车问题&采用与实际车辆运动规律类似的汽车模型作为研究对象&设计了一种基于F9R)&R-"单片机与D?U b0^<的自动泊车系统$依据车身大小以及车辆运动规律计算满足泊车条件的最小区域$通过]R<D+%(#%超声波传感器以及霍尔编码器测量车辆与侧方障碍物的距离以及车辆行驶距离&从而搜索满足泊车条件的车位$利用舵机控制车辆前轮转向并通过直流减速电机提供后轮驱动&通过预先设定的程序指令控制车辆完成自动泊车入位$车辆行驶数据经无线<0\0模块发送至上位机&并利用D?U b0^<软件实现车位轮廓'倒车轨迹以及车速实时显示$实验结果表明&该系统可搜索到符合条件的停车区域&并完成车辆的自动泊车入位&具有较强的稳定性和可靠性%关键词 自动泊车$F9R)&R-"单片机$]R<D+%(#%超声波传感器$D?U b0^<<'+16,*,5H#$.'#',&*&1","3>%&"#*&18P*(91,6I@+&'#;*+'5",I1,6.'!:1$)18("8"#$%&'(*,5=*?L H R Ta O;=A5M?3@&c0/=>\S G5!F2B C C G C H03H C I J?75C3g R C37I C G^3@53K K I53@&c5f?3O35P K I Q57M C H;I2B57K27S I K?3L9K2B3C G C@M&c5f?3!'%##--&R B53?">?+&(*8&*03C I L K I7C Q C G P K7B K8I C U G K JC H8?I453@53?3?I I C TQ8?2K&7B K2?IJ C L K G7B?75Q Q5J5G?I7C7B K?27S?G P K B52G KJ C P K J K37 G?T5Q7?4K3?Q7B K I K Q K?I2BC U1K27&?3L?3?S7C J?7528?I453@Q M Q7K JU?Q K L C3F9R)&R-"Q53@G K2B58J52I C2C J8S7K I?3LD?U b0^<5Q L K Q5@3K L!;22C I L53@7C7B K Q5W K C H2?I U C L M?3L7B K G?TC H P K B52G KJ C P K J K37&7B KJ535J S J?I K?5Q2?G2S G?7K L7CJ K K77B K8?I453@2C3+ L575C3Q!]R<D+%(#%S G7I?Q C352Q K3Q C I Q?3LE?G G K32C L K I?I KS Q K L7CJ K?Q S I K7B K L5Q7?32KU K7T K K37B K P K B52G K?3L7B K Q5L KC U Q7?2G K Q QT K G G?Q7B K L I5P53@L5Q7?32K C H7B K P K B52G K&Q C7B K8?I453@Q8?2K5Q Q K?I2B K L7CJ K K77B K Q5W K C H7B K8?I453@?I K?!9B K Q7K K I53@@K?I 5Q S Q K L7C2C37I C G7B K H I C37T B K K G Q7K K I53@C H P K B52G K?3L7B K I K?IT B K K G L I5P K5Q8I C P5L K LU M7B K L5I K272S I I K37!.R"I K L S275C3J C7C I!9B K?S7C J?7528?I453@5Q2C J8G K7K LU M7B K8I K+Q K78I C@I?J53Q7I S275C3!9B K P K B52G K L I5P53@L?7?5Q Q K377C7B K7C82C J8S7K I7B I C S@B 7B KT5I K G K Q Q<0\0J C L S G K&?3L7B KD?U b0^<Q C H7T?I K5Q S Q K L7C I K?G5W K7B K I K?G+75J K L5Q8G?M Q C H8?I453@2C37C S I&I K P K I Q53@7I?24?3L Q8K K LC H P K B52G K!9B KK V8K I5J K37?G I K Q S G7QQ B C T7B?77B KQ M Q7K J2?3Q K?I2B7B K`S?G5H5K L8?I453@?I K??3L2C J8G K7K7B K?S7C J?752 8?I453@&T B52BB?Q7B K Q7I C3@Q7?U5G57M?3L I K G5?U5G57M!4'@2"(5+*?S7C J?7528?I453@$F9R)&R-"Q53@G K2B582C J8S7K I$]R<D+%(#%S G7I?Q C352Q K3Q C I$D?U b0^<A!引言在我国交通事业逐渐兴起的背景下&人们对汽车的功能需求逐渐提高&如何促进自动泊车系统的高效发展&促进其向智能化方向进行推进&变得尤为重要(%)%一方面&由于我国基础设施建设水平与汽车数量增长速度之间不匹配&汽车数量的爆炸性增长使得公路'街道'停车场变得拥挤不堪$另一方面&越来越多的新手司机上路&加剧了这一状况&增加了交通事故发生的概率(")%复杂的停车环境和狭小的停车泊位&为新手驾驶员的安全停车带来了困扰&增加了停车过程中的风险&而自动泊车系统在汽车中的实际应用很好地解决了这一难题($)%自动泊车系统是一种通过探测车辆周围环境信息来找到合适的泊车位&从而控制车辆的转向'速度&使得车辆能够自主驶入泊车位的系统%相比于人工泊车事故率高'传统倒车雷达智能度低&自动泊车系统提高了车辆的智能化水平和安全性&进一步降低了新手司机驾驶车辆的难度&也为将来实现车辆的自动驾驶打下基础(*)%国外汽车行业发展早&技术成熟&对自动泊车的研究开展的较早(-)%R?5等人(()提出了一种在狭窄垂直停车位中停车的路径规划方法&根据环境感知空间和停车位大小%F B??U?3等人(')使用灰度图像识别停车位&通过实时监控停!投稿网址 T T T!1Q12G M4W!2C JCopyright©博看网. All Rights Reserved.!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#"#*!#车位是否可用从而引导司机将车停入车位%E C 3@U C 等人())提出了一种基于轨迹规划的自动泊车方案&对车辆的力学模型进行分析&建立车辆转向模型和泊车模型%:K 7I C P 等人(&)为实现对车辆转向的快速控制&提出了两种饱和控制&能够实现在不同大小的车位泊车操作%许多外国车企&如大众'福特和别克等多种车型都纷纷搭配了自动泊车系统&且技术愈发成熟(%#)%在国内&朱鹏飞等人(%%)提出了一种基于多传感器融合的自动泊车框架&运用:I K F 2?3和Y ?7G ?U 3F 5J S G 534联合仿真&对建立的虚拟场景进行车位检测从而实现自动泊车%邢玲玲等人(%")通过程序控制硬件模块对周围环境信息的采集'计算&模拟出泊车路线&最终实现了自动泊车控制系统%叶林铨等人(%$)结合了车辆运动学和避障的约束&建立最优控制模型&采用了伪谱法来解决泊车过程中时间最优的控制问题%李红等人(%*)以汽车的运动学模型为基础&研究了自动泊车的自适应控制&提出以实时坐标作为车身航向角补偿的目标%在Y ?7G ?U 下进行了仿真实验&证明了其可行性%学者对自动泊车系统的设计展开了较多研究&但大多数研究都基于仿真实验&且与实际车辆泊车过程存在一定偏差&因此本文设计了一种基于单片机与D ?U b 0^<的自动泊车系统%采用与实际车辆运动规律类似的汽车模型作为研究对象&利用超声波传感器以及霍尔编码器测量泊车区域大小信息&依据车辆大小以及车辆运动规模搜索符合泊车条件的车位&通过预先设定的程序指令控制车辆自动泊车入位&并将车辆状态信息通过<0\0传输至上位机&通过上位机界面对泊车过程进行实时显示&确保车辆在安全的前提下完成整个自动泊车过程%B !自动泊车系统方案自动泊车系统结构如图%所示%系统由两大部分组成&即下位机!汽车模型"部分和上位机!:R 机"部分&两部分之间采用<0\0进行无线通信%下位机部分主要包括一些控制模块如电机驱动模块'舵机驱动模块&同时还包括数据采集模块如超声波测距模块'红外避障模块以及测速模块%此外还包括与上位机之间进行数据传输的无线<0\0通信模块%上位机部分主要包括:R 机&通过D ?U b 0^<对下位机传输过来的数据进行处理计算从而实现车位轮廓显示'倒车轨迹绘制'障碍物报警以及车速实时显示功能%图%!自动泊车系统结构框图C !系统硬件结构设计C D B !硬件总体方案设计本系统所采用的四轮汽车模型如图"所示%通过舵机控制车辆前轮转向&利用直流减速电机提供后轮驱动&同时电机自带霍尔编码器&可以用来测量车辆行驶距离以及车速%车辆侧面安装的超声波传感器用来测量车辆与侧方障碍物之间的距离&红外传感器用来避免车辆与前后方物体发生碰撞&无线<0\0模块用来发送或接收数据%图"!汽车模型C D C !硬件电路设计"["[%!硬件选型及总体电路设计本系统采用F 9R )&R -"单片机(%-)作为汽车模型的主控芯片&其具有性价比高'体积小'控制能力强'低功耗以及易扩展等优点%超声波传感器采用]R <D +%(#%&其测量周期为-#J Q &相较于E R +F ]#*更短&同时对于棉质及不规则物体的测量精度也优于E R +F ]#*(%()%由于超声波传感器在测距的过程中需要关闭单片机中的系统中断&以减小测量结果与实际距离之间的误差%而在利用霍尔编码器测量车辆行驶距离时&需要利用单片机的外部中断&若关闭中断&则会丢失关闭中断期间霍尔编码器所产生的脉冲信号&从而导致测量结果产生较大误差&进而影响到自动泊车过程%针对该问题&本系统所采用的解决方案为*使用第二个单片机作为从单片机&专门测量霍尔编码器所产生的外部中断信号&并将数据通过%'根信号线发送至主单片机%电机选择-"#编码器直流减速电机&其具有寿命长&动力强劲&力矩大等优点(%')%同时电机自带;Z 双向霍尔编码器&电机每转动一圈&编码器输出$&#个脉冲&方便测量车速与车辆行驶距离%舵机所采用的型号为Y >&&-&其工作扭矩为%$4@32J &最大转动角度为%)#j &可以实现汽车前轮的转向%无线<0\0通信模块采用^F :)"((&其具有串口透传功能&传输可靠性好&最大传输速率为*(#)##U 8Q %红外检测模块通过红外线的发射与接收来检测障碍物&其测量距离为"!$#2J &可通过电位器旋钮进行调节%系统总体硬件电路设计如图$所示%"["["!电机驱动模块电路设计本系统所采用的电机为-"#编码器减速电机&其额定电压为%"b &因此电源使用%"b 充电电池组&电机驱动模!投稿网址 T T T!1Q 12G M4W !2C J Copyright ©博看网. All Rights Reserved.第%"期袁子阳&等*基于单片机与D ?U b 0^<""""""""""""""""""""""""""""""""""""""""""""""""""""的自动泊车系统设计与实现#"#-!#图$!系统总体硬件电路图块采用D "&)=&其接口说明如表%所示%表%!D "&)=电机驱动模块接口说明输出;3Z 通道;3Z 输出&连接电机%"b 供电主电源正极输入供电>=.主电源负极输入-b 输出-b 电压输出端&可给Y R O 供电^=;3^=Z 通道;3Z 使能0=%!0=*逻辑输入0=%!0="控制通道;&逻辑输入0=$!0=*控制通道Z若使用该模块分别控制两个电机&则需要单独调速以使它们的转速相同&因此本系统将两个电机并联&以使它们的电压相同&进而转速相同&使用D "&)=的一对输出来控制两个电机%D "&)=控制直流电机状态如表"所示%表"!D "&)=控制电机状态表^=;0=%0="直流电机状态#m m 停止%##制动%#%正转%%#反转%%%制动"["[$!舵机驱动模块电路设计本系统所采用的舵机型号为Y >&&-&其工作电压为$[#!'[#b &工作电流为"##J ;&而单片机输出电流为几十毫安&无法驱动舵机&解决方案是使用一个降压模块给舵机单独供电%此外&由于舵机的控制需要"#J Q 的周期信号(%))&且转动角度随高电平占空比的变化而变化&即需要使用单片机中的定时器中断来控制%而当超声波测距时又需要关闭系统中断&以提高测量精度%解决方案是通过一个继电器来控制舵机的电源&当需要控制舵机转动时&首先打开继电器&然后再控制舵机&否则关闭继电器%-b 继电器模块接口说明如表$所示%表$!-b 继电器模块接口说明b R R 接电源正极>=.接电源负极0=触发端!低电平触发有效"常开端!=/"继电器没有吸合时&与公共端断开&吸合时与公共端接通公共端!R /Y "继电器的公共端常闭端!=R "继电器没有吸合时&与公共端接通&吸合时与公共端断开Y >&&-舵机的控制需要一个"#J Q 的周期信号&其中高电平范围为#[-!"[-J Q &总间隔为"J Q %在这"#J Q 内&高电平的占空比决定了舵机转动的角度%在"#J Q 内&若高电平为%[-J Q &舵机将向&#j 的方向转动!通常称为中立位置&对于%)#j 舵机来说&就是&#j 位置"$若高电平小于%[-J Q &舵机将向#j 方向转动$若高电平大于%[-J Q &舵机将向%)#j方向转动%!投稿网址 T T T!1Q 12G M4W !2C J Copyright ©博看网. All Rights Reserved.!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#"#(!#E !系统软件结构设计E D B !软件总体设计系统软件总体流程如图*所示&首先单片机上电后系统初始化%初始化完成之后电脑端连接系统中<0\0模块所发出的<0\0信号&连接成功之后运行上位机程序&与下位机建立连接%当上位机向下位机发送自动泊车命令后&车辆开始执行自动泊车过程&同时每隔一段时间发送车速数据至上位机进行显示%自动泊车过程开始时首先需要搜索合适的停车区域即车位&当搜索到合适的车位之后&系统开始控制车辆自动泊车入位&与此同时发送车位大小数据!长和宽"并每隔一段时间发送车辆相对车位的位置数据&上位机通过计算实时绘制车辆运动轨迹%在自动泊车过程中若车辆前后方有障碍物距离过近&则车辆停止并将提示信息发送至上位机&待障碍物消失后继续完成自动泊车过程%图*!系统软件总体流程图E D C !数据采集$["[%!超声波传感器测距超声波测距的原理是利用超声波在空气中的传播速度为已知&测量声波在发射后遇到障碍物反射回来的时间&根据发射和接收的时间差计算出发射点到障碍物的实际距离(%&)%]R <D +%(#%超声波传感器工作原理如下*%"给引脚9I 5@输入一个长为%#!"#'Q 的高电平方波$""引脚^2B C 端的电平会由#变为%&此时启动定时器计时$$"当超声波返回被模块接收到时&回波引脚端的电平会由%变为#$此时停止定时器计数&定时器记下的这个时间即为超声波由发射到返回的总时长&结果除以"即超声波单程传播时间$*"根据声音传播速度为$*#J 3Q &即可计算出所测的距离%$["["!车辆行驶距离及车速测量本系统所采用的直流减速电机自带霍尔编码器&电机每转动一圈&编码器输出$&#个脉冲%当需要测量车辆水平位移距离时&主单片机将与从单片机所连接的一根数据线先置为低电平&以便重新开始测量%之后延迟"J Q 作为从单片机反应时间%接着再将数据线置为高电平&再延迟"J Q&此时便可以计算车辆水平位移距离%当从单片机检测到高电平&便将外部中断计数器清零&然后重新开始计数外部中断&车辆位移距离等于外部中断数除以$&#再乘以车轮的周长&从单片机将位移距离值通过)位信号线实时发送至主单片机%E D E !数据发送与接收系统初始化完成并与上位机建立连接之后&主单片机每隔%##J Q 向上位机发送一次数据&包括车速'泊车时车辆状态'搜索的车位大小以及其他相关信息&之后上位机向单片机返回一个字节的数据&具体过程如下*第一步&单片机向上位机发送数据%在单片机通过<0\0向电脑发送数据之前&每次需要发送一条;9指令即*-;9_R 0:F ^=.d #&%"B I B 3.&%"表示一次性发送的字节数&接着再发送真正有用的数据$第二步&上位机接收并处理数据%上位机接收的是字符串&通过D ?U b 0^<中的字符串转无符号字节数组b 0将其转换为数组&并通过数组索引b 0&将每个数据索引出来再进行相应处理$第三步&上位机向单片机发送数据%当上位机接收到单片机发送来的数据并进行相应处理之后&上位机向单片机发送一个字节的数据&不同的值代表了上位机向单片机发送的不同命令$第四步&单片机接收上位机发送来的数据%由于单片机通过<0\0接收到的数据格式为*-_0:.&#&%*#.&其中#代表客户的索引&%代表收到数据的字节数&而冒号后才是收到的有效数据&因此需要对其有效数据进行提取%通过以上*步便完成了单片机!下位机"与上位机之间一次完整的相互通信%E D F !自动泊车过程设计$[*[%!最小泊车区域分析如图-!?"所示&当车辆从;点开始拐弯并倒车&其右后车轮运动轨迹为半径为:的圆的一部分&圆心在后轮车轴延长线上%前轮转弯幅度越大&转弯半径:就越小%当车辆到达Z 点时&运动轨迹为圆的四分之一&此时车身恰好与初始位置车身垂直%最小泊车区域是指满足自动泊车所需的最小区域&只有存在此区域&才能完成自动泊车过程%其大小与车辆大小以及车辆最小转弯半径有关%如图-!U"所示&当汽车从U 处开始进行自动泊车时&图中灰色区域!将其分为F %和F "两个区域"为满足停车条件的最小泊车区域&只有存在大于等于该区域面积且形状类似的区域才能完成自动泊车过程%为方便研究&依据图(定义最小泊车区域相关参数如表*%!投稿网址 T T T!1Q 12G M4W !2C J Copyright ©博看网. All Rights Reserved.第%"期袁子阳&等*基于单片机与D ?U b 0^<""""""""""""""""""""""""""""""""""""""""""""""""""""的自动泊车系统设计与实现#"#'!#图-!?"车辆倒车轨迹图-!U"车辆泊车轨迹图(!最小泊车区域参数分析表*!最小泊车区域相关参数"汽车右侧与车库底部的最小距离S 车库最小宽度!若实际车库宽比S 大&则停车原则为靠左停"O 汽车右侧与车库边缘的最小距离N 汽车后侧与车库左侧应保持的水平距离G 汽车内轮的最小转弯圆周的四分之一E 车位长度B车辆在停入车位后与两侧物体需保持的安全距离最小泊车区域相关参数与汽车本身的属性有关&对于同一辆车&这些参数固定不变%本设计所采用的汽车模型与实际车辆运动规律类似&经过测量&车长R 为"%2J &车宽为^为%)2J &最小转弯半径:为"*2J &安全距离设定B 为-2J &因此其最小泊车区域各参数计算如下!单位*2J "*"+R ,:,B +"%,"*,-+-#S +^,B ,B +%),-,-+")O +:+"*N +:,^,B +"*,%),-+*'G +"H .H :3*+"H $Y %*H "*a *+$'E +R ,B +"%,-+"(以上是理论计算结果&但部分参数与实际情况有所偏差&例如汽车后轮与汽车后边沿还有一定距离&汽车车轮中心与汽车两侧边缘也有一定距离&因此需要通过多次试验对最小泊车区域相关参数进行修正%经过反复实验&最终参数O 修正为%-&参数"修正为*-&参数N 修正为$#%$[*["!泊车区域测量与判断当上位机发送自动泊车命令后&将有关自动泊车的变量进行初始化&随后开始进行自动泊车%首先需要搜索符合条件的停车位%将实际泊车区域分为两个区域F %和F "依次进行测量和判断&当两个区域的大小都满足时&才能进行下一步的倒车入库操作&否则需要重新搜索满足条件的车位%首先测量并判断第一个区域F %&超声波模块安装在车辆右侧&当开始执行自动泊车过程时&车辆开始前进&在单片机中每隔(#J Q 测量一次车辆右侧与右方障碍物的距离%当超声波测量的距离大于"&即汽车右侧与车库底部应保持的最小距离时&表明到达了车位边缘&此时开始记录车辆水平位移&并且实时判断超声波测量距离是否大于"且车辆水平位移小于S %当其中一个值不满足条件时&即超声波测量距离小于"或汽车水平位移大于S &此时判断超声波测量距离是否大于"并且汽车水平位移大于S &即F %区域是否满足要求&若满足要求则进行下一步测量与判断&否则重新测量下一个车位的第一个边缘%当第一个区域F %满足时&同理&进行下一个区域F "的测量与判断%此时实时判断超声波测量距离是否大于O 并且车辆水平位移小于N &当其中一个值超出设定值时&即当超声波测量距离小于O 或汽车水平位移大于N &此时判断超声波测量距离是否大于O 并且汽车水平位移大于N &若成立&则表明区域F "满足要求&此时便完成了车库测量与判断&并且车辆已行驶到设定位置并准备下一步的倒车入库%否则重新开始测量并判断区域F %与F "&其流程如图'所示%图'!泊车区域测量与判断$[*[$!泊车入位当搜索到符合条件的停车区域时&车辆已行驶到指定位!投稿网址 T T T!1Q 12G M4W !2C J Copyright ©博看网. All Rights Reserved.!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#"#)!#置&接下来便执行泊车入位%首先打开继电器&然后前轮转动相应角度&开始倒车%与此同时开始记录车辆右后轮转弯弧长%当其长度为G 时停车&接着前轮回正并开始向后倒车&倒车距离为E X B %至此&便完成了自动泊车过程%$[*[*!障碍物检测与响应车辆前后方的障碍物通过红外避障模块来检测&该模块测量速度快&测量结果实时性高&可以有效避免车辆与周围物体发生碰撞%当车辆前进时&若前方有障碍物过近时&车辆会自动停止&直到障碍物消失后继续完成自动泊车%同理&当车辆倒车时&若后方有障碍物过近时&车辆也会自动停止&直到障碍物消失后继续完成自动泊车%系统每"#J Q 检测一次车辆前后方的障碍物信息%E D G !车位及车辆倒车轨迹显示在搜索到满足最小泊车区域的停车位后&主单片机向电脑发送车位大小以及车辆与车位的距离&包括车位长和宽以及车辆与车位的水平距离与垂直距离%接着通过D ?U +b 0^<("#)图形控件显示车位与车辆&其效果如图)!?"所示%图)!?"中&矩形左上角为坐标起点!#&#"&向下为)轴正方向&向右为&轴正方向%设U 点的坐标为!&#&)#"&则@J A G D 五个点的绝对坐标计算如下!其中@J d N 6S _R 3""*@*!R 3"&)#6O "J *!R 3"_@J &)#6O "A *!R 3"_@J &)#6O 6E "G *!R 3"_@J _S &)#6O 6E "D *!R 3"_@J _S &)#6O "F *!R 3"_@J _S _@J &)#6O "完成车位显示接下来是车辆倒车过程的实时动态显示&其在D ?U b 0^<中的显示效果如图)!U"所示%通过图&车辆坐标计算示意图对0*9P 四个点的坐标进行分析计算%图)!车辆位置显示示意图图&!车辆坐标计算示意图在图&中&设U 点坐标为!&#&)#"&则*d (p !"m $[%*m :"m $(#&(为汽车右后轮转弯弧长&通过单片机实时发送给上位机&0*9P 四个点的&轴和)轴绝对坐标计算如下*0&+&#,:H Q53!*"-R H 2C Q !*"0)+)#-:,:H 2C Q !*",R H Q 53!*"*&+0&,^H Q 53!*"*)+0),^H 2C Q !*"9&+*&,R H 2C Q !*"9)+*)-R H Q 53!*"P &+9&-^H Q 53!*"P )+9)-^H 2C Q !*"将以上公式通过D ?U b 0^<进行编程&从而实现车辆位置坐标的实时计算&D ?U b 0^<车辆位置坐标计算程序如图%#所示%图%#!D ?U b 0^<车辆位置坐标计算程序在D ?U b 0^<中绘制车辆的同时还需要绘制车辆倒车轨迹&其效果如图%%!?"所示%图%%!?"中"%和""的绘制方式如下*图%%!倒车轨迹显示示意图根据D ?U b 0^<中绘制弧b 0的使用方法&对于"%的显示&需要计算图%%!U"中@点横坐标'J 点纵坐标'A 点横坐标以及G 点纵坐标%设G 点坐标为!&#&)#"&则@点横坐标为!:"&J 点纵坐标为!)#6"m :"&A 点横坐标为!&#_:"&G 点纵坐标为)#&且弧"%的起始角为&#j &大小为&#j &根据以上信息便可绘制出指定圆弧&同时还可以设置线条的颜色和类型等%弧""的绘制方法与"%相同&此处不再叙述%图%"为D ?U b 0^<总程序%F !实验结果按照系统硬件电路图对实物进行连接并调试&其目的是排除在接线的过程中可能发生的各种错误&确保硬件连接正确&确保每个接口都是正确可靠的("%)%接着与上位机进行联合测试&确保数据发送和接收正常并同步%系统硬!投稿网址 T T T!1Q 12G M4W !2C J Copyright ©博看网. All Rights Reserved.。
基于LABVIEW的车牌识别停车系统设计
第26页/共27页
感谢您的观看!
第27页/共27页
由于LABVIEW的后续图像处理区域随图像大小的改变而改变,所以要将大小归一化
第5页/共27页
4.2车牌区域初步定位
第6页/共27页
4.2车牌区域初步定位
颜色阀值
第7页/共27页
颜色阀值
第8页/共27页
高级形态学处理
第9页/共27页
简单形态学中值处理
第10页/共27页
滤波器
第11页/共27页
1、LABVIEW是图形化编程,可视化程度非常高,对编程基础要求低。2、LABVIEW提供专门的视觉助手(NI VISION ASSITANT),开发人员无需编程,即能快速完成视觉应用系统的模型建立直接设置相关参数。
第4页/共27页
4.1 车牌识别过程—读取、并自定义大小
本设计统一定义为1024*768大小
车牌原理概述车牌识别设计方案车牌识别识别过程停车场管理系统展望
第1页/共27页
1、设计的原理
硬件部分包括系统触发、图像采集,软件部分包括图像预处理、车牌位置提取、字符分割、字符识别四大部分
第2页/共27页
2、设计方案:不切为单个字符为特色
第3页/共27页
3、为什么使用LABVIEW来开发
测量XY坐标
第12页/共27页
初步定位效果图
第13页/共27页
车牌大小归一化
第14页/共27页
车牌大小归一化
第15页/共27页
剪切掉车牌边框,特别是螺母,方便后续识别
停车管理系统课程设计

停车管理系统课程设计一、课程目标知识目标:1. 让学生理解停车管理系统的作用和重要性,掌握其基本组成部分及功能。
2. 使学生掌握数据结构中与停车管理系统相关的基础知识,如队列、栈等。
3. 帮助学生了解并运用编程语言(如Python或C++)实现简单的停车管理系统。
技能目标:1. 培养学生运用数据结构解决实际问题的能力,能够设计并优化停车管理系统的数据模型。
2. 提高学生的编程能力,使其能够独立完成一个简单的停车管理系统的代码编写和调试。
3. 培养学生团队协作和沟通能力,通过小组合作完成课程项目。
情感态度价值观目标:1. 激发学生对计算机科学和信息技术领域的兴趣,培养其主动学习的态度。
2. 培养学生关注社会问题,认识到信息技术在解决实际生活中的重要作用,增强社会责任感。
3. 引导学生树立正确的价值观,认识到技术应服务于社会,遵循道德规范,保护用户隐私。
本课程针对高年级学生,已具备一定的数据结构知识和编程基础。
课程性质为实践性较强的综合应用课程,旨在通过停车管理系统这一实际案例,使学生将所学知识综合运用到实际项目中。
教学要求注重培养学生的实践能力、创新思维和团队协作能力,通过分解课程目标为具体的学习成果,使学生在完成课程后能够达到预期的知识和技能水平。
二、教学内容1. 停车管理系统概述:- 系统功能介绍- 系统在实际生活中的应用案例2. 数据结构基础:- 队列与栈的应用- 哈希表的原理与实现3. 编程语言选择与使用:- Python/C++语言基础- 编程规范与调试技巧4. 停车管理系统设计与实现:- 系统需求分析- 数据模型设计- 算法设计与优化- 代码编写与测试5. 课程项目:- 小组分工与协作- 项目进度安排与汇报- 项目评价与反馈教学内容根据课程目标,结合课本相关章节,制定以下教学大纲:第1周:停车管理系统概述,数据结构基础第2周:编程语言选择与使用,编程规范与调试技巧第3-4周:停车管理系统设计与实现(需求分析、数据模型设计、算法设计)第5-6周:停车管理系统设计与实现(代码编写与测试)第7周:课程项目启动,小组分工与协作第8周:课程项目中期汇报,项目评价与反馈第9周:课程项目总结,成果展示与分享教学内容科学系统,注重理论与实践相结合,旨在提高学生的实际操作能力和创新思维。
labview课程设计报告

labview课程设计报告一、课程目标知识目标:1. 理解LabVIEW编程基础,掌握基本的数据类型、结构以及运算符的使用。
2. 学会使用LabVIEW进行数据采集、处理和展示,掌握常见的数据分析方法。
3. 掌握LabVIEW的子VI创建与调用,能够实现程序模块化设计。
技能目标:1. 培养学生运用LabVIEW解决实际问题的能力,能够独立设计并实现简单的数据采集与分析系统。
2. 提高学生的程序调试和优化能力,培养良好的编程习惯。
3. 培养学生团队协作能力,能够与他人共同完成复杂的LabVIEW项目。
情感态度价值观目标:1. 培养学生对LabVIEW编程的兴趣,激发学生的学习积极性。
2. 增强学生的自信心,使他们在面对编程挑战时勇于尝试,不怕困难。
3. 培养学生严谨的科学态度,注重实验数据的真实性和准确性。
课程性质:本课程为实践性较强的课程,旨在通过LabVIEW编程软件,使学生掌握虚拟仪器的设计与实现。
学生特点:本课程针对的是高年级学生,他们已经具备一定的编程基础和实际操作能力,对于LabVIEW编程有一定了解。
教学要求:结合学生特点,课程注重理论与实践相结合,强调动手实践,培养学生解决实际问题的能力。
教学过程中,教师应引导学生自主学习,培养他们的创新意识和团队协作能力。
通过课程学习,使学生在知识、技能和情感态度价值观方面得到全面提升。
二、教学内容1. LabVIEW基本概念与操作- 数据类型与运算符- 前面板与后面板设计- 控件与指示器的使用2. 数据采集与处理- 数据采集卡的使用- 数据读取与存储- 数据处理与分析(滤波、统计等)3. 程序设计方法- 子VI创建与调用- 程序结构(顺序、循环、条件结构)- 数据流编程思想4. 程序调试与优化- 调试工具的使用- 性能优化方法- 编程规范与技巧5. 实践项目- 简单数据采集与分析系统设计- 复杂数据处理与分析项目- 团队合作项目(综合运用所学知识解决实际问题)教学内容安排与进度:第一周:LabVIEW基本概念与操作第二周:数据采集与处理第三周:程序设计方法第四周:程序调试与优化第五周:实践项目(个人项目)第六周:实践项目(团队合作项目)教材章节关联:本教学内容与教材中第1-4章内容相关,涉及LabVIEW基础、数据采集、程序设计、调试与优化等方面的知识。
基于机器视觉的智能车库引导系统设计
基于机器视觉的智能车库引导系统设计摘要:随着时代的发展,人们逐渐进入智能化时代,随着机动车数量的快速增加,现代社会对停车场管理的要求也越来越高。
为了方便停车场的管理,设计了基于LabVIEW和单片机的停车场收费系统,首先利用机器视觉进行车牌识别,然后通过单片机处理相关信息将车辆引导至空余的车位,使停车具有较高的安全性高、便捷性和可扩展性强的特点,适用于地下停车场和停车楼的控制与管理。
关键词:LabVIEW;单片机;车牌识别;车辆引导1 基于LabVIEW识别提取车牌信息1.1LabVIEW编程理论基于LabVIEW的智能车库引导系统的第一步通过LabVIEW车牌识别,而车牌识别的图像是通过照相机进行拍摄的,照相机对于来往车辆进行拍摄,OCRTrainingInterface对字符进行训练,训练中经过阈值分割、指定感兴趣区域、调节字符间距,完成对单个字符的分割。
并通过对字符的编辑,制作完成字符集,然后用OCR函数创建的机器视觉程序来读取字符,从而完成对车牌信息的识别[1]。
其识别提取的流程如图1所示。
图1 车辆识别流程图1.2程序演示Step1:插好相机,链接好单片机,打开路径:OCRTEST文件夹下,找到MyTest.exe,双击打开。
图2 操作面板Step2 :选择debug模式还是MCU[2]模式,如果是MCU模式,还会跳出如下选择对话框,选择MCU链接COM口,程式自动发送help给MCU,如果超过20s 没有收到MCU返回的ok,程序就停止。
DEBUG模式无需连接MCU,所以不用选择MCU COM[3]。
Step3:MCU连接上以后跳出选择CCD COM对话框,选择所连接的ccd.(会有20秒的选择时间,超时停止)STEP4:待CCD和MCU都连上之后,CCD和MCU显示灯会亮绿色,如下图。
在原图显示框框选需要检测的区域(下图只是演示,实际上一次只会拍摄到一个车牌),点击start ,如果是MCU模式,程式就会一直等待MCU的拍照信号(MCU要检测时会发送paizhao/r/n。
labview使用课程设计

labview使用课程设计一、教学目标本课程的目标是让学生掌握LabVIEW的基本使用方法,能够运用LabVIEW进行数据采集、处理和显示。
具体目标如下:知识目标:使学生了解LabVIEW软件的基本功能和界面布局,理解虚拟仪器的基本概念。
技能目标:培养学生使用LabVIEW进行数据采集、处理和显示的能力,能够编写简单的LabVIEW程序。
情感态度价值观目标:培养学生对科学实验的热爱,提高学生动手实践的能力,培养学生团队协作的精神。
二、教学内容本课程的教学内容主要包括LabVIEW软件的基本功能、界面布局、数据采集、数据处理和数据显示等方面。
具体安排如下:第一课时:LabVIEW软件的基本功能和界面布局。
介绍LabVIEW软件的功能和界面布局,使学生熟悉软件的操作。
第二课时:数据采集。
讲解如何使用LabVIEW进行数据采集,包括虚拟仪器的创建和使用。
第三课时:数据处理。
讲解如何使用LabVIEW进行数据处理,包括数学函数、信号处理等功能。
第四课时:数据显示。
讲解如何使用LabVIEW进行数据显示,包括图表、曲线等展示方式。
三、教学方法为了激发学生的学习兴趣和主动性,本课程将采用多种教学方法,包括讲授法、讨论法、案例分析法和实验法等。
讲授法:用于讲解LabVIEW软件的基本功能和操作方法,使学生掌握软件的使用。
讨论法:用于探讨数据采集、处理和显示的方法和技巧,促进学生之间的交流。
案例分析法:通过分析实际案例,使学生了解 LabVIEW 在实际中的应用。
实验法:让学生亲自动手操作LabVIEW软件,进行数据采集、处理和显示的实践。
四、教学资源为了支持教学内容和教学方法的实施,丰富学生的学习体验,我们将选择和准备以下教学资源:教材:《LabVIEW教程》参考书:《LabVIEW编程实例解析》多媒体资料:LabVIEW软件教学视频实验设备:计算机、数据采集卡、传感器等五、教学评估为了全面、客观、公正地评估学生的学习成果,我们将采用以下评估方式:平时表现:通过观察学生在课堂上的参与程度、提问回答等情况,评估学生的学习态度和理解程度。
基于LabVIEW的智能车位管理系统
基于LabVIEW的智能车位管理系统作者:季倩倩董佳佳来源:《电脑知识与技术》2017年第16期摘要:该文提出了“智慧交通视角下的车位管理与汽车安全系统的设计”集成了RFID、嵌入式系统、数据库系统、Lab-VIEW技术、设计了传感器模块Zig,Bee无线通信模块、控制器、供电模块、GPRS模块以及报警模块等模块,实现了车位的智能化管理以及汽车启动后的无死角侦查等功能,达到了智慧安全交通的目的。
关键词:labview;智慧交通;车位管理随着科技的不断进步,汽车从奢侈品向代步工具的转变日趋明显,汽车的增长率提高的同时,“停车难”已经成为城市交通的一大难题,在我国尤为严重,并且停车场内实行人工管理,车位利用率低、人工管理疏导能力差,因此智慧交通已经成为大势所趋。
本项目针对智慧交通中的停车位和儿童安全车载的重要环节进行了针对性的研究,设计了传感器模块,控制器模块,系统的主检测模块,数据对比模块,监控报警模块,车位显示模块,计费模块,报警控制模块,拍照控制模块,APP查询授权模块,ZigBee无线通信模块,实时采集摄像头、RFID、指示灯等监控连接设备,将声、光、电、压力、心率、位置等各种需要的数据信息进行了有效处理,实现停车场车位的有效利用如图一,并通过物联网技术切实保障儿童车载的安全,实时拍照监控,计时收费,安全监测等功能,达到对车位的智能化、无人化管理的目的,对智慧交通的发展具有很大的意义。
1系统设计及其框图1)数据采集与处理模块:该模块主要利用多传感器技术,采集停车位的信息,和小孩压力、脉搏等各项信息,如停车位人口采集进入车辆的信息(车辆惟一的RFID标签、车型等)、车内儿童信息(压力脉搏等)以及车辆驶入和驶离的时间等信息。
停车位采集停车场被占用车位位置和数量、未使用车位位置和数量、车辆是否驶入预定车位等信息。
这些信息除了存入停车场的数据库管理系统外,还将利用信息传输模块和用户信息交互模块进行数据交互。
RFID停车场收费系统(基于LABVIEW)答辩
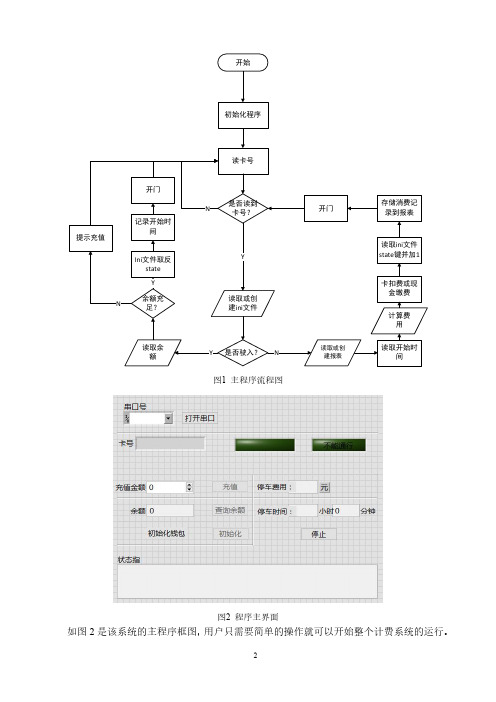
开始读取或创建ini文件读卡号是否读到卡号?N初始化程序Y是否驶入?Ini文件取反state记录开始时间读取余额Y余额充足?提示充值N开门Y读取开始时间读取或创建报表计算费用卡扣费或现金缴费存储消费记录到报表开门N读取ini文件state键并加1图1 主程序流程图图2 程序主界面如图2是该系统的主程序框图,用户只需要简单的操作就可以开始整个计费系统的运行。
在程序开始时,用户选择一个RFID读卡器对应的端口并点击打开串口,开始计费系统的运行,注册新卡时需要点击初始化按钮,将初始化卡和初始化钱包,该操作会让卡内余额设置为0。
当车辆取卡后会产生一个文件,存储车辆进入时间和在库状态当刷卡时程序首先判断卡片对应的车辆是入库还是出库,如果是出库则计算费用,并根据卡内余额扣费或者提醒工作人员收取现金,保存消费记录并点亮通行灯。
主程序框图如图3所示。
图3 主程序程序框图硬件操作子VI设计6.1高频RFID读写器和卡片测试首先使用硬件供应商提供的测试程序“HF高频读写器测试软件V3.0.exe”进行测试:图4 读卡器测试软件根据硬件手册,将设备设置成被动工作模式,然后尝试读取卡号,或者将读卡器设置成主动上传卡号,在卡片接近读卡器时会自动收到读卡器发送给上位机的数据。
使用RS232时需要将地址设置成20。
然后利用RFIDCommTest.vi测试LabVIEW程序与硬件设备的通信,即向串口发送命令并接收应答。
发送命令:0308C12002000116,应答为:0308C220000000XX。
可以使用测试程序“HF高频读写器测试软件V3.0.exe”查询是否设置成功。
6.2串口发送子VI图5UART_RT.vi程序框图图6UART_RT.vi前面板向串口写入数据后,等待设备响应,100ms之后从串口读取数据,在程序中使用的串口发送功能均使用这个子VI。
封装了visa端口配置、visa发送、visa读取、visa关闭,为打卡串口、读取串口和关闭串口配置了完整的过程。
基于LabVIEW的停车场管理系统
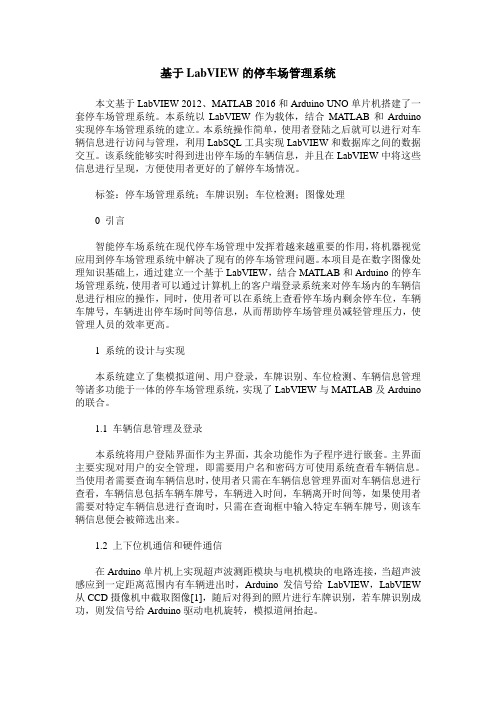
基于LabVIEW的停车场管理系统本文基于LabVIEW 2012、MATLAB 2016和Arduino UNO单片机搭建了一套停车场管理系统。
本系统以LabVIEW作为载体,结合MATLAB和Arduino 实现停车场管理系统的建立。
本系统操作简单,使用者登陆之后就可以进行对车辆信息进行访问与管理,利用LabSQL工具实现LabVIEW和数据库之间的数据交互。
该系统能够实时得到进出停车场的车辆信息,并且在LabVIEW中将这些信息进行呈现,方便使用者更好的了解停车场情况。
标签:停车场管理系统;车牌识别;车位检测;图像处理0 引言智能停车场系统在现代停车场管理中发挥着越来越重要的作用,将机器视觉应用到停车场管理系统中解决了现有的停车场管理问题。
本项目是在数字图像处理知识基础上,通过建立一个基于LabVIEW,结合MATLAB和Arduino的停车场管理系统,使用者可以通过计算机上的客户端登录系统来对停车场内的车辆信息进行相应的操作,同时,使用者可以在系统上查看停车场内剩余停车位,车辆车牌号,车辆进出停车场时间等信息,从而帮助停车场管理员减轻管理压力,使管理人员的效率更高。
1 系统的设计与实现本系统建立了集模拟道闸、用户登录,车牌识别、车位检测、车辆信息管理等诸多功能于一体的停车场管理系统,实现了LabVIEW与MATLAB及Arduino 的联合。
1.1 车辆信息管理及登录本系统将用户登陆界面作为主界面,其余功能作为子程序进行嵌套。
主界面主要实现对用户的安全管理,即需要用户名和密码方可使用系统查看车辆信息。
当使用者需要查询车辆信息时,使用者只需在车辆信息管理界面对车辆信息进行查看,车辆信息包括车辆车牌号,车辆进入时间,车辆离开时间等,如果使用者需要对特定车辆信息进行查询时,只需在查询框中输入特定车辆车牌号,则该车辆信息便会被筛选出来。
1.2 上下位机通信和硬件通信在Arduino单片机上实现超声波测距模块与电机模块的电路连接,当超声波感应到一定距离范围内有车辆进出时,Arduino发信号给LabVIEW,LabVIEW 从CCD摄像机中截取图像[1],随后对得到的照片进行车牌识别,若车牌识别成功,则发信号给Arduino驱动电机旋转,模拟道闸抬起。
基于Labview的无线网智能停车管理系统
• 133•基于Labview的无线网智能停车管理系统北京联合大学 刘 旭 李 媛 罗 靖一、引言随着我国经济的快速发展,私家车的拥有量不断增加,所带来的问题就是交通拥堵,在城市商圈、大型文体活动中心或公司集中地,堵车、停车难的问题更加严重。
智能停车导引系统可以实时显示停车场的停车现状,提高停车场的车位使用率,起到更好地管理停车场,降低停车场的经营成本,提高社会效益和经济效益的作用;还能为车主节省时间,轻松停车。
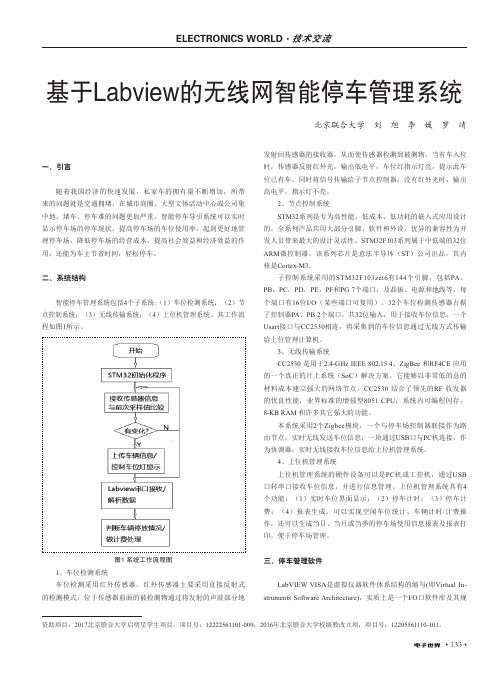
二、系统结构智能停车管理系统包括4个子系统:(1)车位检测系统;(2)节点控制系统;(3)无线传输系统;(4)上位机管理系统。
其工作流程如图1所示。
图1 系统工作流程图1、车位检测系统车位检测采用红外传感器。
红外传感器主要采用直接反射式的检测模式,位于传感器前面的被检测物通过将发射的声波部分地发射回传感器的接收器,从而使传感器检测到被测物。
当有车入位时,传感器反射红外光,输出低电平,车位红指示灯亮,提示此车位已有车,同时将信号传输给子节点控制器;没有红外光时,输出高电平,指示灯不亮。
2、节点控制系统STM32系列是专为高性能、低成本、低功耗的嵌入式应用设计的,全系列产品共用大部分引脚、软件和外设,优异的兼容性为开发人员带来最大的设计灵活性。
STM32F103系列属于中低端的32位ARM 微控制器,该系列芯片是意法半导体(ST )公司出品,其内核是Cortex-M3。
子控制系统采用的STM32F103zet6有144个引脚,包括PA ,PB ,PC ,PD ,PE ,PF 和PG 7个端口,及晶振、电源和地线等,每个端口有16位I/O (某些端口可复用)。
32个车位检测传感器占据了控制器PA 、PB 2个端口,共32位输入,用于接收车位信息;一个Usart 接口与CC2530相连,将采集到的车位信息通过无线方式传输给上位管理计算机。
3、无线传输系统CC2530 是用于2.4-GHz IEEE 802.15.4、ZigBee 和RF4CE 应用的一个真正的片上系统(SoC )解决方案。
基于labview和rfid技术的智能停车场管理系统

〔记录:媒介与互联〕信息记录材料2019年11月第20卷第11期基于LabVIEW和RFID技术的智能停车场管理系统许卫洪(无锡商业职业技术学院物联网技术学院江苏无锡214153)【摘要】随着人们生活水平的提高,城市汽车数量激增,为提升停车场的停车效率和服务质量,必须引入新的停车场管理系统。
本文设计了基于LabVIEW和RFID技术的智能停车场管理系统,该系统以虚拟仪器(LabVIEW)作为载体,结合射频识别技术(RFID)对停车场进行管理.【关键词】射频识别技术;虚拟仪器;停车场【中图分类号】TP39【文献标识码】A【文章编号】1009-5624(2019)11-0192-021引言随着全面建成小康社会宏伟目标的稳步推进,家庭汽车的使用更加普及,写字楼、大型购物场所等公共场所对停车场设施的需求越来越大,与停车场设施的不足之间的矛盾更加突出。
对现有停车场进行快速高效的管理是缓解矛盾的可行途径之一。
因此,引入更多智能交通领域和当前控制领域的前沿技术,构建自动化程度和智能化水平大幅提升的停车场管理系统就具有重要意义。
RFID技术作为新时期兴起的自动识别技术,目前发展迅速,应用前景广阔,LabVIEW作为载体能够与下位机良好通信,实现智能化管理停车场。
2系统硬件设计RFI理子S签4FFI D:S面式读卡^V-串口•装彎麴严1图1智能停车场管理系统的硬件设计方案基于LabVIEW和RFID技术的智能停车场管理系统的硬件设计方案如图1所示。
硬件系统由RFID电子标签、RFID读卡器及装有LabVIEW的计算机组成页。
首先,每辆车分配一个RFID电子标签,在车辆进出场的时候通过标签在读卡器上刷卡来实现管理。
装有LabVIEW软件的电脑通过串口与RFID读卡器相连,通过LabVIEW编写的上位机软件,可以向读卡器发送命令,也可以读回电子标签的信息,从而实现整个管理系统的功能。
3系统软件设计基于LabVIEW和RFID技术的智能停车场管理系统,实际是利用RFID读卡器和高频电子标签对停车场车辆进出进行管理。
车位管理系统课程设计

车位管理系统课程设计一、教学目标本课程旨在让学生了解和掌握车位管理系统的基本原理、设计与应用,通过学习,学生应达到以下目标:1.知识目标:•了解车位管理系统的定义、功能和分类。
•掌握车位管理系统的设计原理和技术要点。
•了解车位管理系统的应用场景和未来发展。
2.技能目标:•能够运用相关知识分析和解决实际中的车位管理问题。
•具备车位管理系统的基本设计能力。
•能够运用现代信息技术手段,对车位管理系统进行维护和升级。
3.情感态度价值观目标:•培养学生的创新意识和团队协作精神。
•增强学生对车位管理系统的认知,提高其对现代城市交通管理的重视。
二、教学内容本课程的教学内容主要包括以下几个部分:1.车位管理系统的概念、功能和分类。
2.车位管理系统的设计原理,包括硬件选型、软件设计等。
3.车位管理系统的应用场景,如停车场、小区等。
4.车位管理系统的发展趋势,如物联网、大数据等技术的应用。
教学大纲将按照以下顺序进行:1.车位管理系统的概述(第1周)2.车位管理系统的设计原理(第2-3周)3.车位管理系统的应用案例分析(第4周)4.车位管理系统的发展趋势(第5周)三、教学方法为了提高教学效果,本课程将采用以下教学方法:1.讲授法:用于讲解车位管理系统的基本概念、原理和设计方法。
2.案例分析法:通过分析实际案例,使学生更好地理解车位管理系统的应用。
3.实验法:安排实验课,让学生亲自动手操作,加深对车位管理系统的认识。
4.讨论法:学生进行小组讨论,培养学生的团队协作能力和创新思维。
四、教学资源为了支持本课程的教学,我们将准备以下教学资源:1.教材:《车位管理系统设计与应用》2.参考书:相关论文、技术文档3.多媒体资料:教学PPT、视频教程4.实验设备:车位管理系统实验平台通过以上教学资源,我们将帮助学生更好地学习车位管理系统知识,提高其实际应用能力。
五、教学评估为了全面、客观地评估学生在车位管理系统课程中的学习成果,我们将采用以下评估方式:1.平时表现:通过课堂参与、提问、讨论等环节,评估学生的学习态度和积极性。
停车场车位控制系统 课程设计
目录目录目录 0《可编程逻辑控制器》课程设计任务书 (2)一、设计题目五:停车场车位控制系统 (2)二、系统工作过程说明 (2)三、设计步骤: (3)一、绪论 (6)1、设计目的 (6)2、设计内容 (6)3、要实现的目标 (6)二、系统分析及硬件设计 (7)1、系统工作说明 (7)2、系统I/O分配 (7)3、PLC外围接线 .......................................................................................... 错误!未定义书签。
三、系统软件设计 (8)1、系统流程图 (8)2、系统程序设计 (8)四、系统调试 (12)1、硬件调试 (12)2、软件调试 (12)总结 (13)参考文献 (14)附录 (15)1、语句表 (15)2、其他图表................................................................................................... 错误!未定义书签。
The design of parking lot based on PLCDirector:Yufeng Associate Director:BaoJie(huangshan college information engineering institute, huangshan, anhui 245041)Abstract:Intelligent buildings will be one of the most important infrastructures in the information society, and the management and control system is an indispensable part for parking lots in intelligent buildings. With the development of computer control technology, the function, software and hardware of management and control systemhave also been improved continuously. The paper presents a plan of using Programmable Logic Controller (PLC) to manage the instructions of entering, leaving and parking, to realize the automation of the parking lots and reduce the operation cost. It is suitable for small and medium-sized parking lots.The parking lot consists of 18 parking spaces, the Entrance Detectors, the Barrier Management System, and seven segment LED whose function is to show the numbers of the vehicles in the garage and the remaining numbers of the parking spaces by the lights, and so on. And it establishes an automation control system basing on PLC to realize the automatic control of the parking lots.The system can realize the automatic control of the vehicles’ entering and leaving as well as the automatic display of the parking spaces in the garage. Owing to PLC’s reliability, operability, flexibility and other advantages, this control system has much excellence compared to the conventional parking lot, such as its short maintenance cycle, convenient adjustment, low cost, easy operation, high reliability, and the strong practical value, and it also can greatly improve the design efficiency.Key Words:Management of parking; parking control; c250 counter; PLC;Parking sensor《可编程逻辑控制器》课程设计任务书——供09级自动化、电气工程及其自动化、电气工程与自动化专业学生用引言:《可编程逻辑控制器》课程设计是该课程的一个重要教学环节,既有别于毕业设计,又不同于课堂教学。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
李福新,白勇民,李 灵(天津中德应用技术大学,天津,300350)摘要:本文基于NI-cRIPO 9025可编程控制器,通过反射式红外光电传感器和触发按钮模拟停车场车辆的出入和泊位信息,利用LabVIEW 可视化程序对整个过程进行数据采集和状态监控。
整体设计简洁明了,可作为传感器和电子技术课程的综合实验实训项目应用于高职专业课程的实践教学。
关键词:智能停车场;LabVIEW ;可编程控制器;红外传感器Design of Parking Management System Based on LabVIEWLi Fuxin,Bai Yongmin,Li Ling(Tianjin Sino-German University of Applied Sciences,Tianjin,300350)Abstract :In this paper,NI-cRIPO 9025.Programmable controller based on,through the reflection type infrared photoelectric sensor and a trigger button simulation parking field vehicle access and parking information using LabVIEW which is a visual program data acquisition and monitoring of the entire process. The whole design is concise and clear,and it can be applied to the practical teaching of the comprehensive experiment and training project of the sensor and the electronic technology course.Keywords :intelligent parking lot;LabVIEW;programmable controller;infrared sensor 0 引言随着城市车辆保有量的不断增大,停车问题日益突出,无论是公共场所停车场还是小区停车泊位越来越紧张。
为了能让司机进入停车场前对该停车场的剩余泊位以及对大型停车场内空闲车位的具体方位有一个了解,有必要设计停车场的智能控制系统,使车主能够及时了解停车场的车位情况并做出适当的选择,同时也方便停车场管理方进行管理。
本项目来源于传感器技术和实用物理技术基础课程的实例开发,利用NI-cRIPO 9025可编程控制器作为核心控件,以我校多个具体的停车场位置为模拟对象,由反射式红外光电传感器信号模拟车辆的出入库,由触发按钮模拟车辆的泊位信息,通过Labview 可视化程序对整个过程进行数据采集和状态监控,可实现剩余车位数的实施监控和显示以及剩余车位的具体信息,并在达到停车上线后发出报警信息。
1 车位管理系统的架构智能停车场的整体框架是由NI-cRIPO 9025控制器进行的信号采集与处理,用LabVIEW 编写人机界面程序,显示屏实施监测显示,进出口都装有红外传感器检测车辆的进出,每个车位都装有检测车辆是否停在该车位的传感器开关,进车口有提示灯当停车场满了的时候该灯点亮,整个停车场系统框架如下图1所示。
其中NI cRIO-9025嵌入式实时控制器是高性能CompactRIO 可编程自动化控制器(PAC)平台中的一部分,它拥有800MHz Freescale 的工业实时处理器,可以实现确定可靠的实时应用,其512MB 的DDR2RAM 与4GB 的非易失性存储介质,是程序实现高速运行和数据存储的重要保障。
系统具体技术指标如下:①具有自动计算剩余车位的功能;②具有显示剩余车位数的功能,当车位满时报警提示功能;③能够人工设置车位总数。
本系统利用红外线传感器模块和触发式按钮模拟现实停车场车辆的进出,由于端口限制,实际效果仅为模拟校园停车场中某一个由10车位构成的停车区域,如图2所示,并由12V 和5V两种直流稳压电源模块提供硬件所需电压。
图2 模拟停车场2 停车场的工作流程该系统的工作流程分为车辆驶入停车场、车位检测、车辆驶离停车场、车位满时提示LED 亮起三部分组成,系统采取并行手图 1 智能停车场管理系统整体框DOI:10.16520/ki.1000-8519.2016.06.0062.1 车位驶入当行驶车辆触发停车场闸栏前的红外线传感器时,则将此信息发送给中央微控制器,中央微控制器控制道闸开启,车辆驶入。
当车辆完全驶入停车场以后,红外线传感器检测到车辆顺利通过道闸,此时将该信息传送给中央微控制器,中央微控制器再次控制道闸落下完成车辆的入场。
此时中央微控制器记录车辆数量加一,控制停车场道路牌显示空余车位信息减一。
方便途径停车场周围的其他用户查看空余车位信息,以决定是否选择进入该停车场。
2.2 车位检测驶入停车场当车辆进入停车位,停车位顶部的红外线传感器检测到车辆的存在,表明该车位已被占用。
此时车位检测子控制器将检测到的信息通过CAN总线通信的方式发送给中央控制器。
这里需要说明的是停车场车位检测采用分布式检测结构,易于模块化集成以应用于车位数量不同的停车场。
而停车场中央控制器再将该信息通过异步串口通信方式发送给上位机,上位机显示该停车位被占用。
用户可以根据停车场入口处的大屏幕观看到上位机即时情况,方便用户查看停车场空余停车位信息。
2.3 车辆驶出当驶出车辆触发停车场闸栏前的红外线传感器时,则将此信息发送给中央微控制器,中央微控制器控制道闸开启,车辆驶出。
当车辆完全驶出停车场以后,红外线传感器检测到车辆顺利通过道闸,此时将该信息传送给中央微控制器,中央微控制器再次控制道闸落下完成车辆的出场。
此时中央微控制器记录车辆数量减一,控制停车场道路牌显示空余车位信息加一。
2.4 车位满报警报警电路的工作原理是当车库中没有空余车位,即车位数显示0时,此时有程序设置检测,输出反馈高电平,从而使报警装置工作,车库入口处LED发光,以此实现自动报警。
3 软件设计本设计软件部分由控制面板和数据显示两个模块组成,使用LabVIEW软件开发,如图3所示。
具体功能如下:载,车位检测,信息实时显示等功能。
方便了停车用户准确及时的获取最新信息,有效地节省了停车时间。
(2)数据显示模块:数据显示模块显示车位有两种状态,分别为:车位可用,车位被占用。
停车用户可以通过数据显示模块直观有效的获取车位信息,有效地缩短了使用者停车所花费的时间。
4 结论本系统的设计基于Ni-cRIPO 9025的信号采集和存储功能,由LabVIEW程序进行控制,其目的旨在通过项目的实施让学生充分了解传感器的工作原理,在此基础上解决实际应用问题。
因此,以上内容仅仅是个初步方案,而在实际授课中会逐步引导学生更多的考虑实际停车场中的问题,比如,如何防止和剩余车位的误统计、如何利用传感器解决自动抬杆和收费计时、如何利用数字电路技术方法直接通过停车场内车位占用情况获取剩余车位信息等。
参考文献[1] 陈树学,刘萱,LabVIEW宝典[M],电子工业出版社,2011[2] 沈聿农,传感器及应用技术,化学工业出版社,2014作者简介李福新,天津中德应用技术大学基础课部教师,讲师职称图3 上位机人机界面(上接40页)若变流比为75/5时,其相互对应的穿心式电流互感器的穿心匝数为2。
而按照表二的数据若穿心式电流互感器的变流比为50/5时,则所对应的穿心式电流互感器的匝数为4。
2.3 穿心式电流互感器在安装过程的分析在对穿心式电流互感器安装时,则要保持一次电流的进线即L1和一次电流的出线即L2不要穿反,否则会导致穿心式电流互感器的损坏。
其次在对二次电流的进线S1和二次电流的出线S2进行连接时,要确保接线的正确性。
最后,要对穿心式电流互感器的端子进行详细的检查,以保证二次线路的接线端子没有出现接触不良及接触不上的情况发生。
如果在接线过程中发现穿心式电流互感器的接线螺丝的垫圈比较大,则导线会在穿心式电流互感器外壳的凹处部位压不上穿心式电流互感器的二次接头,进而导致导线在中间悬空。
因此要对穿心式电流互感器的过大垫圈进行及时的更换。
此外,在对穿心式电流互感器安装接线的过程中还需要注意不要用力旋转螺丝,并控制螺丝的长度不宜过长,否则会使得穿心式电流互感器设备内部的接线柱被顶掉,进而导致设备的损坏。
3 结论根据上述分析,若在实际的接线过程中技术人员只考虑穿心式电流互感器的电流变化比而不考虑穿心式电流互感器的安匝数目,则会使得在对穿心式电流互感器接线过程中发生错误,所以我们需要高度的重视穿心式电流互感器的安匝数目。
在进行实际工作中,需要严格的按照一次额定安匝数目等于一次额定电流与穿心式电流互感器穿心匝数的乘积规律来进行操作,进而保障计量的正确性,同时还要按照此规律对穿心式电流互感器进行检查和保护的工作,避免由于接线问题所导致的穿心式电流互感器发生连续烧坏的情况,进而导致安全生产事故的发生。
只有明确了穿心式电流互感器的使用安装过程中需要注意的要点问题,才能更好的保证穿心式电流互感器的正常工作及提高企业的工作效率。