4个”实体模型和“12个”运动模型分析
项目六 智能制造数字化基础
四、先进数字化设计与仿真技术-虚拟样机
1.产生背景 传统的设计方式要经过图纸设计、样机制造,测试改进、定型生产等步骤, 为了使产品满足设计要求,往往要多次制造样机,反复测试,费时费力、成 本高昂。虚拟样机技术的出现,改变了传统的设计方式,采用数字技术进行 设计。它能够在计算机上实现设计——试验——设计的反复过程,大大降低 了研发周期和研发资本,能够快速响应市场,适应现代制造业对产品T (time)、Q(quality)、C(cost)、S(services)、E (environment)的要求,极大地促进了敏捷制造的发展,推动了制造业的 数字化、网络化、智能化。
29
2.虚拟样机技术定义 虚拟样机技术(Virtual Prototyping, VP)是指在产品设计开发过程中,将分
散的零部件设计和分析技术(指在某一系统中零部件的CAD和FEA 技术)揉合 在一起,在计算机上建造出产品的整体模型,并针对该产品在投入使用后的各种 工况进行仿真分析,预测产品的整体性能,进而改进产品设计,提高产品性能的 一种新技术。
基于三维的虚拟设计、智能设计、可靠性设 计、有限元分析、优化设计、动态设计、工
业造型设计等现代设计方法
串行设计、独立设计
并行设计、协同设计
纸质图档、技术文档管理
基于PDM的产品数字化管理
物理样机
虚拟样机、物理样机
过早进入物理样机阶段,从设计到物理 形象直观,干涉检查、强度分析、动态模拟、
样机反复迭代修正由个人经验、手工计 优化设计、外观和色彩设计等采用虚拟样机
7
8
汽车数字化开发-虚拟样机
9
10
11
二、我国数字制造与智能制造的发展现状 1、国内数字制造业智能制造发展现状分析
系统工程第三章系统模型与模型化
(二)ISM实用化方法
设定 问题 、形 成意 识模
型
找出 影响 要素
要素 关系 分析 (关 系图
)
建立可 达矩阵 (M)和缩
减 矩阵 (M/)
矩阵 层次 化处
理 (ML/)
绘制 多级 递阶 有向
图
建立 解释 结构 模型
分析 报告
比较/ F 学习
试验; ➢ 经过了分析人员对客体的抽象,因而必须再拿到
现实中去检验。
概述
2.模型的分类与模型化的基本方法
模型的分类:
A——概念模型A1(思维或意识模型A11; 字句模型
A12; 描述模型A13)
符号模型A2(图表模型A21;数学模型A22) 仿真模型A3 形象模型A4(物理模型A41;图像模型A42) 类比模型A5
……
二.解释结构模型(ISM)
(一)系统结构模型化基础
1.概念
结构→结构模型→结构模型化→结构分析
2.系统结构表达及分析方法 理解系统结构的概念(构成系统诸要素间的
关联方式或关系)及其有向图(节点与有向弧) 和矩阵(可达矩阵等)这两种常用的表达方式。
系统结构的基本表达方式
系统结构的基本表达方式
➢ ISM的实施:一般来说,需要三种角色的人员 参加,即掌握建模方法的专家、协调人和参与 者。
方法
协
参
技术
调
与
专家
人
者
(四) ISM的实施及应用
➢ 应用实例:讨论人口控制综合策略问题
经小组讨论得出影响人口增长的诸多因素:
(1)社会保障
(8)社会思想习惯
(2)老年服务
#现代制造系统实验规划指导书
《现代制造系统》实验指导书1.1实验名称:制造系统分析上机实验1.2实验学时:4学时1.3实验类型:综合性实验1.4实验目的:(1)加强学生的理论联系实际的能力,提高对现代制造系统及其分析方法的认识程度;(2)促进对课堂教学环节中所获知识的理解和巩固;(3)培养和发挥创造能力和想象能力;(4)加强处理和解决问题的能力。
1.5使用软件:FLEXSIM、em-PLANT等任选一种。
1.6实验内容:(1)分析某一柔性制造系统结构;(2)在仿真软件上,建立柔性制造系统仿真模型;(3)分析该系统性能,并和理论计算结果进行比较。
1.7实验要求:(1)根据课堂讲授的制造系统功能视图描述方法,绘制给定的柔性制造系统工作原理图;(2)利用仿真软件系统,建立系统仿真模型,并逐一设定各个组成设备的工作性能参数;(3)实验设计:综合理解课堂内容,提出实验方案,包括初始状态的变化、时间阶段的差异等实验条件变更,至少做出9种以上的实验记录;(4)分别分析系统各个关键组成设备的运行情况,记录运行曲线,统计计算相关系统参数;(5)编写实验报告。
1.8实验报告要求:实验报告是实验工作的总结和提高,机实验报告应该反映出学生在实验过程中所做的主要工作和取得的主要成果,以及心得体会。
学生必须以积极认真、严谨求实的态度完成课程设计报告的撰写。
上机实验报告编写基本要求:(1)每人独立完成一份实验报告;(2)实验报告应书写规范、文字通顺、图表清晰、数据完整、结论明确;(3)实验报告内容:制造系统平面布置图;设备选型及数量;仿真系统界面、实现方法及参数设置;仿真实验结果分析;参考文献;(4)实验报告不少于2000字,必须附有必要的结构图、流程图及测试结果等项内容。
1.9附录一:柔性制造系统例题1.9.1实验系统构成图1 实验系统构成图1.9.2具体参数1)工位:1~M-12)工位机床数Si3)运输系统:M4)中央服务机构1.9.3假设条件封闭系统,各个队列空间足够大。
运动仿真

运动仿真本章主要内容:●运动仿真的工作界面●运动模型管理●连杆特性和运动副●机构载荷●运动分析9.1 运动仿真的工作界面本章主要介绍UG/CAE模块中运动仿真的功能。
运动仿真是UG/CAE(Computer Aided Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力分析和设计仿真。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion的功能可以对运动机构进行大量的装配分析工作、运动合理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。
通过对这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。
运动仿真功能的实现步骤为:1.建立一个运动分析场景;2.进行运动模型的构建,包括设置每个零件的连杆特性,设置两个连杆间的运动副和添加机构载荷;3.进行运动参数的设置,提交运动仿真模型数据,同时进行运动仿真动画的输出和运动过程的控制;4.运动分析结果的数据输出和表格、变化曲线输出,人为的进行机构运动特性的分析。
9.1.1 打开运动仿真主界面在进行运动仿真之前,先要打开UG/Motion(运动仿真)的主界面。
在UG的主界面中选择菜单命令【Application】→【Motion】,如图9-1所示。
图9-1 打开UG/Motion操作界面选择该菜单命令后,系统将会自动打开UG/Motion的主界面,同时弹出运动仿真的工具栏。
9.1.2 运动仿真工作界面介绍点击Application/Motion后UG界面将作一定的变化,系统将会自动的打开UG/Motion 的主界面。
该界面分为三个部分:运动仿真工具栏部分、运动场景导航窗口和绘图区,如图9-2所示。
机械臂设计

机械臂的运动分析和模拟摘要本设计采用在基于Lisp编程语言的CAD下和MATLAB软件下进行的机械臂的程序化设计,将机械臂用CAD的形式绘制出来,并用Lisp语言进行编程将Auto CAD和MATLAB软件相互联系使用产生运动轨迹坐标数据和速度加速的曲线,便能清晰的将所设计机械臂的运动形式和运动轨迹的合理性表现出来,从而能够仅仅通过适当调整在Auto CAD中机械臂的各个构件或者运动轨迹就能得出设计者想要的最优化设计,这样能够在很大程度上减少我们人要花费很大精力进行大量复杂的工程计算,大大的提高了工作效率降低工作负担。
因此采用此种方法不管是在工程的设计上还是在大量的技术计算上发挥着至关重要的作用关键词:机械臂,仿真软件,模块化Mechanical arm's movement analysis and simulationABSTRACTThis design uses a Lisp-based programming language and MATLAB under the CAD software of the robot arm under the procedures of design, the robot arm using CAD Drawing out the form, and Lisp programming language and MA TLAB will be Auto CAD software contact trajectory coordinates the use of data and accelerate the speed of the curve, can be designed to be a clear movement of the robot arm trajectory forms and demonstrated the reasonableness and thereby be able to adjust only through the appropriate arm of Auto CAD in the various components or trajectory will be able to come to designers want to optimize the design, to a large extent this can reduce our people have to spend a great deal of energy to carry out a large number of complex engineering calculations, a significant increase in the workload and reducing efficiency. Therefore to apply this method, whether in the design of the project or in the calculation of a large number of technology plays a pivotal roleKEYWORDS: manipulator, simulation software, modular摘要............................................. - 1 -ABSTRACT.......................................... - 2 -前言............................................ - 2 -第一章概述....................................... - 4 -1.1 AutoCAD技术的实际应用领域与发展................ - 4 -1.2 Lisp语言简介及在仿真方法........................ - 6 -1.3 Matlab简介及仿真应用........................... - 7 -第二章机构运动分析................................. - 9 -2.1机构运动分析的必要性 ........................... - 9 -2.2运动分析的目的及基本方法........................ - 9 -2.3关于机构和杆组的基本知识....................... - 10 -2.4机构简图 ..................................... - 11 -第三章基于Lisp-Auto CAD下的机构运动实例........... - 14 -3.1平面机构运动分析.............................. - 14 -3.11运动分析的目的............................ - 14 -3.12程序说明.................................. - 14 -3.13模拟结果及分析............................ - 14 -3.2典型机构运动仿真实例.......................... - 15 -第四章基于Matlab-Auto CAD下的机械臂仿真........... - 17 -4.1机器人介绍.................................... - 17 -4.2机器人工作原理................................ - 18 -4.3机械臂介绍及运动分析 .......................... - 19 -4.31机械臂介绍................................ - 20 -4.32机械臂的运动分析.......................... - 22 -4.4机械臂的仿真程序设计 .......................... - 27 -第五章机械臂运动实例.............................. - 30 -总结........................................... - 33 -参考文献........................................ - 37 -源程序........................................... - 38 -仿真 (simulation) 是利用模型复现实际系统中发生的本质过程,并通过对系统模型的实验来研究存在的或设计中的系统。
系统工程

1系统工程:起源:一次最早源于工程技术专家运功用综合技术手段处理一些复杂的系统问题。
在20世纪40年代初,为完成巨大规模的复杂工程和科学研究任务,一些科学技术工作者开始运用系统的观点和方法处理技术和工程问题。
美国贝尔电话公司在发展微波通信网络时,首先应用一套系统的方法,并首度提出了“系统工程”这个名词。
定义:系统工程是对系统,尤其是复杂系统实施组织与管理的综合技术。
狭义:指对系统进行分析、综合、仿真、优化、设计等比较理论话的技术。
广义:指开发和改造系统的规划、计划、设计、研制、生产、安装、运行等阶段所涉及的思想、程序、方法等的总和。
交叉学科(性质):因为所研究的问题涉不同的学科,要解决这些问题,就需要不同学科的知识和不同领域的专家参加,因此系统工程具有跨学科或多学科交叉的学科性质,是一门综合性的横向技术科学;同时要研究的问题往往是多目标、多因素、类系错综复杂,求解困难,因此系统工程处理问题时要求人们全面的,综合的思考问题具有较好的专业知识背景。
2系统定义:由相互作用和相互依赖的若干组成部分结合而成的具有特定功能的有机整体。
系统与系统要素的关系:1.系统与要素之间的关系非常密切:系统的功能和目标是通过每个要素的作用的才得以正常作用 2.要素与系统是对立统一的:性质不同,层次地位不同,发展规律不同 3.系统和要素存在着功能的转化:要素的功能---(系统结构与法则)--->系统的功能 4.系统和要素是相对的:一个系统可以组成更高层次的系统要素;一个要素可以是由更低层次的要素所组成的系统。
3系统的基本性质1.整体性:任何一个系统都是由不同要素依据一定逻辑要求构成的整体,而不是这些要素的简单凑合,或者说这些要素不相关的堆砌 2.涌现性:系统整体性反映系统要素与系统整体功能数量上的差异,而系统的涌现性则表现出质上的差异,即系统各个部分组成一个整体后,就会产生整体具有而各个部分原来没有的某些东西 3.相关性:是指构成系统的要素之间,系统内层次之间都是以一定的规律相互联系,相互作用,既相互依存,又相互制约 4.层次性:任何一个系统都可以在空间或时间上进行初步分解,分成次级,次次级等,分系统,子系统,直至元素,形成一系列的排列次序 5.目的性:任何一个人造系统或认为系统都具有特定的目的,为了总的目的,各子系统直至元素都具有各自的目的 6.成长性:任何系统都是从无到有,从小到大,经历孕育期,诞生期,发展期,成熟期,衰老期和更新期7.环境适应性:任何一个系统都处于一定的环境之中,或者说它是一个更大系统的子系统,他的形成与发展在不同的程度上会受到环境的制约4系统的研究内容——如何认识一个系统:1. 系统目标,系统目标是多样的,如经济、环境、社会、政治等,不同的目标有不同的权重;不同的阶段,目标权重会发生不断的变化;存在近期、中期、长期目标,具有层次性 2. 系统功能,系统在环境中所起的作用或系统完成的任务,通常以作用的大小和完成任务的能力来评价系统的功能 3.系统行为,指一个系统的输入作用于系统所引起的输出,反映系统对输入的响应程度 4. 系统结构:系统内部相互关系的总和 5.系统法则:指支配系统的各要素以及要素之间相互支持、联系、制约的一些规律 6. 系统环境:系统之外的一切与它相关联的事物的集合。
物理模型的构建

物理模型的构建一、什么叫物理模型物理模型是为便于对实际物理问题进行研究而建立的高度抽象的理想化的实体、理想化过程等。
如力学中的质点、单摆、匀速直线运动、匀变速直线运动、自由落体运动、抛体运动、简谐振动、匀速圆周运动等都是物理模型。
二、物理模型的产生和作用1. 模型是形成物理概念建立物理规律的基础。
用物理模型可以使抽象的假说物理理论加以形象化,便于想像和思考研究问题.物理学的发展过程,可以说就是一个不断建立物理模型和用新的物理模型代替旧的或不完善的物理模型的过程。
比如对原子结构的认识就是了从“葡萄干蛋糕”模型开始的,随后卢瑟福从α粒子散射实验出发,提出了原子的核式模型结构,玻尔又以“定态、跃迁”理论解释了核式模型结构与经典电磁学之间的矛盾,核式结构模型得到了发扬光大。
2.运用物理模型可以简化和纯化研究对象及其过程。
在研究一些实际问题时,有些对象或过程与某些物理模型比较接近,一定的场合或条件下,可以当作物理模型来处理,从而抓住问题的核心和主要因素以及本质特征,暂时撇开次要的因素和非本质的特征,大大地方便了对物理问题的处理。
例如,在研究地球绕太阳公转的轨道问题时,由于地球与太阳的平均距离比地球的半径大得多,这时地球的形状和大小可以忽略,直接把地球当成质点来处理。
在运动学中大多数情况下都是把研究对象当成质点来处理。
再比如假设阻力恒定时,我们把车辆的制动,子弹打木块看成匀减速直线运动;把空气阻力影响小,从高处静止释放后物体的运动看成自由落体运动等等。
3.运用物理模型有利于发挥想象力和物理抽象能力。
从宏观世界中的天体的运行到微观世界中的分子原子、基本粒子的运动一般都是比较复杂的,只有采用适当的物理模型来分析,才能发挥物理抽象思维的作用。
三、物理模型的运用随着教学改革的深入,二期课改的精神是更突出对学生应用能力及创新能力的挖掘和培养,大量实践应用型、信息给予型、估算型等物理问题频繁出现于学生的面前,由此,如何于实际情景中构建物理模型借助物理规律解决实际问题则成了一个重要环节。
UG运动仿真-运动分析
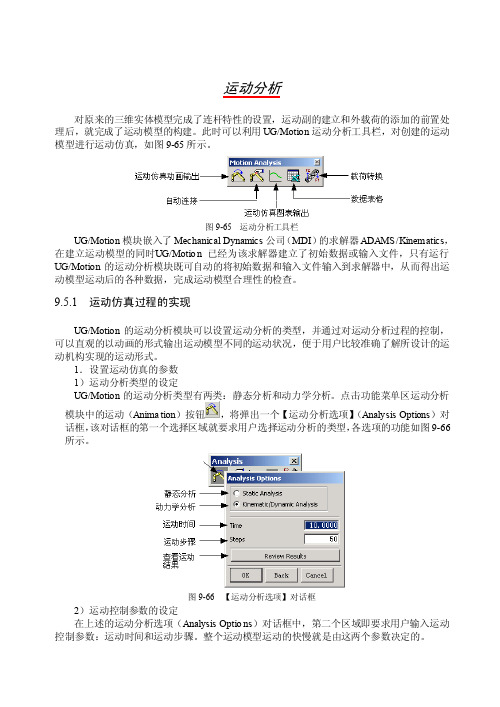
运动分析对原来的三维实体模型完成了连杆特性的设置,运动副的建立和外载荷的添加的前置处理后,就完成了运动模型的构建。
此时可以利用UG/Motion运动分析工具栏,对创建的运动模型进行运动仿真,如图9-65所示。
图9-65 运动分析工具栏UG/Motion模块嵌入了Mecha nical Dynami cs公司(MDI)的求解器AD AMS/Kinema tics,在建立运动模型的同时U G/Motion已经为该求解器建立了初始数据或输入文件,只有运行UG/Motion的运动分析模块既可自动的将初始数据和输入文件输入到求解器中,从而得出运动模型运动后的各种数据,完成运动模型合理性的检查。
9.5.1 运动仿真过程的实现UG/Motion的运动分析模块可以设置运动分析的类型,并通过对运动分析过程的控制,可以直观的以动画的形式输出运动模型不同的运动状况,便于用户比较准确了解所设计的运动机构实现的运动形式。
1.设置运动仿真的参数1)运动分析类型的设定UG/Motion的运动分析类型有两类:静态分析和动力学分析。
点击功能菜单区运动分析模块中的运动(Animat ion)按钮,将弹出一个【运动分析选项】(Analys is Option s)对话框,该对话框的第一个选择区域就要求用户选择运动分析的类型,各选项的功能如图9-66所示。
图9-66 【运动分析选项】对话框2)运动控制参数的设定在上述的运动分析选项(Analys is Option s)对话框中,第二个区域即要求用户输入运动控制参数:运动时间和运动步骤。
整个运动模型运动的快慢就是由这两个参数决定的。
2.运动仿真过程的动画输出及控制1)运动仿真过程的控制设置完了运动分析的参数后,若选择的运动分析类型为静态分析点击OK键,将弹出一个【静态平衡】(Static Equili brium)对话框,如图9-67所示。
最新国家开放大学电大本科《计算机绘图》期末题库及答案
最新国家开放大学电大本科《计算机绘图》期末题库及答案考试说明:本人针对该科精心汇总了历年题库及答案,形成一个完整的题库,并且每年都在更新。
该题库对考生的复习、作业和考试起着非常重要的作用,会给您节省大量的时间。
做考题时,利用本文档中的查找工具,把考题中的关键字输到查找工具的查找内容框内,就可迅速查找到该题答案。
本文库还有其他网核及教学考一体化答案,敬请查看。
《计算机绘图》题库及答案一一、判断题(下列各题中正确的打“√”。
错误的打“×P|0每空2分.共30分)1.在镜像时,镜像线是一条临时的参照线,镜像后并不保留。
( )2.使用菜单栏的“标注/线性”命令,既可创建水平线性尺寸标注,也可创建垂直线性尺寸标注。
( )3.用PLINE命令绘制的多段线或闭合多边形时,其中每一线段均为一个单独的对象。
( )4.可以用Windows下的记事本编辑一段文字,然后将其插入到AutoCAD中。
( )5.最近点捕捉不是指捕捉到离对象最近的点。
( )6.被关闭酌图层与被冻结的图层在图形重新生成时没有区别? ( )7.Zoom命令提供了2种缩放系数的输入方法。
( )8.每个图块只能够定义一个属性。
( )9.AREA命令只能查询单个零件的面积。
( )10.倒圆角命令只能对二维实体上的直边倒圆角。
( )11.被锁住图层中的图形不能被显示出来。
( )12.内部图块只能在当前图形文件中插入。
( )13.在矩形阵列时,行间距值不能是负数。
( )14.轴测图不能渲染。
( )15.在镜像时,为保持文字的可读性,应该设置变量mirrtext=0。
( )二、单项选择题(从供选择的答案中选出正确的答案。
将其编号添入括号内。
每小题3分,共30分)1.在AutoCAD中,要打开或关闭正交模式,可按( )键。
A.F2 B.F9C.F7 D.F82·在“修改标注样式”对话框中的( )选项卡中可以调整文字的位置。
高考物理基本概念和规律网格化“4个”实体模型和“12个”运动模型分析
回扣点十“4个”实体模型和“12个”运动模型分析
1.“4个”实体模型
(1)质点:形状和大小对研究问题的影响可以忽略不计,只考虑物体的质量.
(2)点电荷:形状和大小对研究问题的影响忽略不计的带电体.
(3)理想气体:常温常压下的气体,或者不计分子间的相互作用和分子势能的实际气体.
(4)柱状模型:有气体、液体和固体三种柱状模型,主要应用于研究风能、喷泉或者电流微观表达式及电流的形成.
2.运动模型
(1)匀速运动:F合=0
(2)匀变速直线运动:F合≠0且恒定,F合与速度v方向共线.
(3)匀速圆周运动:F合=F向且大小恒定,F合与速度v方向垂直.
(4)平抛运动(类平抛运动):把运动沿初速度方向和垂直初速度方向分解
(5)自由落体运动:只受重力,加速度为重力加速度,匀变速直线运动的规律都适用.
(6)竖直上抛运动(类竖直上抛运动):例如沿光滑斜面上升的物体返回出发点.
(7)连接体模型:整体法与隔离法结合牛顿第二定律分析.
(8)直线+平抛+圆周运动模型:分过程分析运动特点,利用相应规律分析,分析运动转折点的速度是解题关键.
(9)粒子在组合场内的运动模型:
电场内直线+磁场内圆周运动;电场内偏转+磁场内圆周运动;磁场内的圆周运动+磁场内的圆周运动
解题关键:一是要分过程画好运动轨迹;二是要分析好转折点的速度;三是要注意运动的周期性
(10)传送带模型:实质是相对运动的分析,解题方法主要应用动力学和能量观点
(11)板块模型:实质也是相对运动问题,解题方法主要应用动力学方法、动量和能量观点.
(12)碰撞模型:系统满足动量和能量守恒。
Abaqus常用技巧总结
Abaqus常用技巧总结1.对time increment的根本理解abaqus的step里有maximum number of increment、initial increment、minimum increment 、maximum increment四个量许多网友不知怎样设置合理,合理设置是建立在深刻理解基础上的。
要理解这个问题,首先需要了解abaqus的计算过程和有限元计算收敛性问题,abaqus首先用initial 值输入进行叠代计算,如果计算结果收敛,则继续以这个值代入计算下一步,如果不收敛,则自动减小时间步长(time increment)重新计算直到收敛然后计算下一步。
但是如果时间步长减小到最小值minimum时计算结果还是不收敛,则abaqus将停止计算,由此可知maximum值和minimum值分别是abaqus在收敛计算时时间步长的上下限,同时total time=求和(time increment*number),当时间步长很小时,需要计算的步数number相应增大(电脑计算花的时间也随之增大),因此number一般要设置较大值。
minimum并不是越小越好,因为1)number即计算时间增大2)abaqus计算精度约在10^(-5),当时间步长小于这个值,计算结果已经没什么意义了。
有限元计算收敛性与(最小空间步长/时间步长)值有关,若minimum设为10^(-5),还是不收敛,可适当减小空间步长(即把网格画细点),当然还有一些其他办法,如果实在计算不了,也许是模型本身有点问题,或改为显示explicit计算总而言之,maximun number要适当设置较大值,initial可适当改小(如-2,-3量级),minimum (-5量级)不要修改,maximum值影响不大,可不改.2.moment的加载一个大筒体上有三个接管端面固定,大筒体两端加载扭距,如何加载?(1)将大筒体两端要施加扭矩的节点分别定义为两个Nset:left, right.(2)分别在大筒体两端的圆心处定义两个reference node: rp-left,rp-right.(3)用如下命令将两个节点集绕3轴旋转的自由度与参考点耦合起来,其他自由度度是否耦合根据具体问题而定:*KINEMATIC COUPLING, REF NODE=rp-leftleft, 6,6*KINEMATIC COUPLING, REF NODE=rp-rightright, 6,6(4)在两个参考点上施加绕3轴旋转的弯矩.提醒:reference node也有自由度,注意相应的边界条件.3.abaqus计算时c盘的临时文件太大了,怎么改目录?临时目录是Windows自己定义的,可以在系统环境变量中修改.4.CAE中如何加预应力具体没作过,看看*PRESTRESS HOLD和*INITIAL CONDITIONS, TYPE=SOLUTION, REBAR这两个命令以及ABAQUS Analysis User's Manual “Defining reinforcement,” Section 2.2.3 “Defining rebar a s an element property,” Section 2.2.45.hypermesh里面看abaqus分析的结果(1)你在abaqus中计算完成后,将结果文件输出到*.fil.(2)利用hyperworks提供的hmabaqus.exe(在安装目录下的Altair\hw7.0\translators中)(3)在控制台下运行 hmabaqus *.fil *res,执行完成后就生成了相应的res文件(4)在hyperview中打开你的模型文件*.inp和结果文件*.res,就可以查看你的结果了6.X-Y Plots**** STEP: pre-load***Step, name=pre-load, nlgeompre-loading*Static0.01, 1., 1e-05, 0.1........**** LOADS**** Name: pt-load Type: Concentrated force*Cload_G5, 2, -200.E6**........***Output, history, frequency=1*node output, nset=_G5CF2,U2*element output, elset=_G5E22, S22***monitor, node=_G5, dof=27.如何把上一次分析结果作为下一次分析的初始条件使用LDREAD命令,首先需要注意下面两个问题:(1)每一个ANSYS的实体模型的面或体都要定义对应的单元类型编号材料属性.编号实常数编号单元坐标系编号这些参数在整个分析过程中保持不变而这些编号对应的属性在各个步骤中是不同的.(2)网格划分要满足所有步骤的要求单元类型必须兼容步骤:(1)创建实体模型(2)创建多个物理环境设定一个物理环境中的单元类型材料属性实常数坐标系等,将这些参数的编号赋给实体模型的面或体施加基本物理载荷和边界条件.设定求解选项:选择一个标题使用PHYSICS, WRITE命令将物理环境存入文件中(3)清楚当前的物理环境命令是PHYSICS, CLEAR 4重复第二步准备下一个物理环境8.材料方向与增量步材料方向:针对各向异性材料(如板金材料、复合材料等)变形体,材料方向定义材料的某一特定方向如纤维方向。
《快速成形技术》实验指导书概要

实验须知实验课是整个学习过程的一个重要环节, 通过实验可以提高学生分析问题和解决问题的能力,使学生掌握基本的实验方法与操作技能。
一.实验目的1.加深理解和巩固课堂教学的基本知识。
2.培养正确的科学实验方法,培养严谨的科学工作作风。
3.能独立操作和独立完成实验任务,提高在实验中分析问题和解决问题的能力。
二.实验任务1.学习利用 Pro/E设计三维零件2.掌握 STL 文件的生成方法和精度确定。
3.掌握切片加工软件的应用。
4.了解 LOM 快速成形机的基本结构及加工原理。
5.学习 LOM 快速成形机的基本操作及应急处理。
6.了解纸基快速原型的后处理过程。
三.实验前的准备实验能否顺利进行并收到预期效果,对实验的预习准备是非常重要的。
因此,学生应在每次实验课之前认真阅读实验指导书,并复习教材中的相关内容。
明确实验目的、实验内容、实验原理、实验方法、步骤以及实验的注意事项。
四.实验课的进行1.学生进入实验室后要严格遵守实验室的规章制度和安全操作规程。
2.认真听取实验指导教师对实验的介绍。
3.观察实验中出现的各种现象,记录实验数据。
4.实验结束后,计算机应正常退出、断电,快速成型机应按照要求的程序断电。
清理实验现场后方可离开实验室。
五.实验报告试验报告是对实验工作的总结,应简明地将实验结果完整、真实地表达出来。
试验报告要求文理通顺,字迹端正、清晰,分析合理,结论正确,讨论中肯。
试验报告应包括以下内容:1.实验名称、系别、专业、年级班次、实验者及同组人姓名、实验日期。
2.实验目的3.主要实验内容及结果。
4.对实验结果进行分行、讨论,回答实验指导书中提出的问题。
实验一快速原型建模及前置处理一.实验目的1.学习用三维零件设计软件,进行零件的三维设计。
2.掌握 STL 文件的生成方法和精度确定,了解估算加工时间软件的应用。
二.实验内容1.设计三维数字模型1参照给出的工程图设计零件的三维实体造型。
2学生自行设计三维数字模型,要求:高 <15mm,长 /宽 <130mm。
自由落体运动规律的应用
自由落体运动规律的应用考点解读自由落体运动是初速度为零、加速度为g 的匀加速直线运动,因此一切匀加速直线运动的公式均适用于自由落体运动,特别是初速度为零的匀加速直线运动的比例关系式,更是经常在自由落体运动中用到. 典例剖析例3 在学习了伽利略对自由落体运动的研究后,甲同学给乙同学出了这样一道题:一个物体从塔顶落下(不考虑空气阻力),物体到达地面前最后一秒内通过的位移为整个位移的925,求塔高H (取g =10 m/s 2).乙同学的解法:根据h =12gt 2得物体在最后1 s 内的位移h 1=12gt 2=5 m ,再根据h 1H =925得H =13.9 m ,乙同学的解法是否正确?如果正确说明理由,如果不正确请给出正确解析过程和答案.跟踪训练3 如图6所示,小球从竖直砖墙某位置静止释放,用频闪照相 机在同一底片上多次曝光,得到了图中1、2、3、4、5…所示小球运 动过程中每次曝光的位置.连续两次曝光的时间间隔均为T ,每块砖 的厚度为d .根据图中的信息,下列判断错误的是( )A .位置“1”是小球的初始位置B .小球做匀加速直线运动C .小球下落的加速度为dT 2D .小球在位置“3”的速度为7d2T1.物理模型问题(1)实体模型:质点例4 高速铁路的快速发展正改变着我们的生活,高速列车使我们的出行更加舒适、便捷.下列情况中,可将列车视为质点的是( ) A .测量列车的长度B .计算列车在两城市间运行的平均速度C .分析列车形状对所受阻力的影响D .研究列车车轮的转动跟踪训练4 下列情况中运动的物体不能被看作质点的是()图6A .研究“神舟八号”飞船绕地球运转的速率B .研究飞行中的直升机上的螺旋桨C .研究在水平推力作用下沿水平地面运动的木箱D .研究飞行过程中炮弹的轨迹 (2)运动模型:自由落体运动模型例5 小球从离地面90 m 高处由静止开始做匀加速直线运动下落, 其下落高度h 随时间t 的变化规律如图7所示,则下列说法中不正确的是( )A .小球下落的加速度大小为8 m/s 2B .小球在t =2 s 时速度大小为16 m/sC .小球在前3 s 内的平均速度大小为12 m/sD .小球在第4 s 内通过的路程为64 m跟踪训练5 伽利略在研究自由落体运动时,做了如下的实 验:他让一个铜球从阻力很小(可忽略不计)的斜面上由静 止开始滚下,并且做了上百次.假设某次实验过程伽利略 是这样做的:在斜面上任取三个位置A 、B 、C ,让小球分 别从A 、B 、C 处静止滚下,如图8所示.设A 、B 、C 与斜面底端的距离分别为x 1、x 2、x 3,小球由A 、B 、C 运动到斜面底端的时间分别为t 1、t 2、t 3,小球由A 、B 、C 运动到斜面底端时的速度分别为v 1、v 2、v 3,则下列关系式中正确并且是伽利略用来证 明小球沿光滑斜面向下的运动是匀变速直线运动的是( )A.v 12=v 22=v 32B.v 1t 1=v 2t 2=v 3t 3 C .x 1-x 2=x 2-x 3D.x 1t 21=x 2t 22=x 3t 23A 组 运动图象的分析与运用1.如图9所示,汽车以10 m/s 的速度匀速驶向路口,当行驶 至距路口停车线20 m 处时,绿灯还有3 s 熄灭.而该汽车在图7图8绿灯熄灭时刚好停在停车线处,则汽车运动的速度(v )-时 间(t )图象可能是()2.如图10为两个物体A 和B 在同一直线上沿同一方向同时做匀加速运动的v -t 图线.已知在第3 s 末两个物体在途中相遇, 则两个物体出发点的关系是( )A .从同一地点出发B .A 在B 前3 m 处C .B 在A 前3 m 处D .B 在A 前5 m 处B 组 自由落体运动3.伽利略对自由落体运动的研究,开创了研究自然规律的科学方法,这就是( ) A .对自然现象进行总结归纳的方法 B .用科学实验进行探究的方法C .对自然现象进行总结归纳,并用实验进行验证的方法D .抽象思维、数学推导和科学实验相结合的方法4.一个小石块从空中a 点自由落下,先后经过b 点和c 点,不计空气阻力.已知它经过b 点时的速度为v ,经过c 点时的速度为3v .则ab 段与ac 段位移之比为 ( ) A .1∶3B .1∶5C .1∶8D .1∶95.如图11所示,一根长为L =10 m 的直杆由A 点静止释放,求它通过距A 点为h =30 m ,高为Δh =1.5 m 的窗户BC 所用的时间Δt .(g 取10 m/s 2)图9图10图11。
ADAMS机构建模与运动和力分析
-30 -8.8677
3.38305 0.29559 0.999995602
-30 -11.7764 2.547463 0.392547 0.999998981
-30 -16.0599 1.868011 0.53533 1.000002428
-30 -21.7056 1.382132 0.72352 0.999999862
-30 -2.4592 12.19918 0.081973 1.00000366
-30 -2.6174 11.46171 0.087247
1
-30 -2.8271 10.61164 0.094237 1.00000955
-30 -3.1042 9.664198 0.103473 0.999983571
湖南大学课程考核报告
HUNAN UNIVERSITY
ADAMS 虚拟样机技术 课程报告
A2B12 机构建模与运动和力分析
(个人作业仅供参考)
学生姓名
学生学号专业班级Fra bibliotek机械工程
任课老师
2015 年 5 月 5 日
1
湖南大学课程考核报告
一、 题目
根据分配的题目将周转轮系 A2 和双曲柄机构 B12 串联组合成一个组合机 构,根据要求对该组合机构作运动分析、静力分析、机械利益分析、功率分析、 机械效率分析等。
-30 -3.4723 8.639757 0.115743 0.99999136
-30 -3.9664 7.563621 0.132213 1.000009076
-30
-4.64
6.46552 0.154667 1.000002586
-30 -5.5775 5.378744 0.185917
第4章系统建模理论与方法
2024/5/12
2266
4 则最短停车距离的影响D因素有
①车速——车速越大,停车距离越大,则要限制最大时速。 <<中华人民共和国道路交通安全法实施条例>>规定: 高速公路车速:60~120km/h
载客汽车≤120km/h 机动车≤100km/h 摩托车≤80km/h 没有道路中心线道路: 城市道路≤30km/h,公路≤40km/h 同方向只有一条机动车道的: 城市道路≤50km/h,公路≤70km/h
平均致死率:中国27.3%、日本0.9%、美国1.3%,30分钟死 亡占85%。
2024/5/12
1144
10月13日下午5时30分,佛山南海黄岐的广佛五金城里,两岁小女孩悦悦, 在路上被一辆面包车撞倒和碾轧。而之后将近7分钟时间,还有呼吸的悦悦一直 孤零零地躺在路边,18个路人先后经过,但都当没看见,而其间悦悦又被一辆货 车碾轧过去。
事故死亡人数同比上升。
2024/5/12
1100
交通事故特点:
(1)下午至晚间时段交通死亡事故多发 下午至晚间时段(14:00~22:00),共死亡44835人,占总数 的45.4%。
(2)年末年初月份交通事故较多(最多11月) 低驾龄驾驶人员事故多发(三年以下驾龄司机为主)
(3)在中国,交通事故每死亡四个人中有三个是交通弱者 司机13.4%,行人和骑自行车占45%(包括骑电动自行车者)
2024/5/12
1122
2011年7月4日,凌晨4时许,湖北随(州)岳(阳)高速公路229KM附 近,(湖北省仙桃市毛嘴镇珠玑村),发生一起两车追尾的交通事故导 致翻倒燃烧。事故发生时,该客车搭载52名乘客(其中有5名儿童),在 事发路段的应急车道内停车下客,被后面一辆满载冬瓜的“鄂FEA30 挂”大型货车追尾相撞,造成两车翻出高速公路护栏外起火燃烧,货 车驾驶员当场死亡。事故造成26人死亡、31人受伤。
第3章 数据模型及其设计

3.6.1从概念模型到关系模型
设计步骤:
第一步,对概念模型“符号化” 用符号表示实体名、属性名、联系名
如: 学生 xs 学号 xh 姓名 xm 性别 xb … 课程代号 kcdh 课程名 kcm … 系代号 xdh 系名 ximing … …
3.2.1 现实世界
组织模型: 组织模型:
是一个组织中所有对象,在规定规则的指 导和控制下,相互协调运动而构成的一个有机整 体。
3.2.1 现实世界
组织模型 对象 个体 特征
事物(或个体)及 其联系 事物的集合 (即对象) 事物(即个体)
表现事物
3.2.2 概念世界
又称信息世界或观念世界,是对现实世界的第1层 次抽象,是现实世界在头脑中的反映
(4)外关键词(Foreign Key)
如有关系,学生(学号,姓名,性别,…) 成绩(学号,课程号,分数) 设有关系A和B,若属性组合K是A的主关键词,但不是B的关键词,则称K是B相 (学号)是“学生”的主关键词,但不是“成绩”的主关键词,则称(学号)是 对于A的外关键词。 “成绩”的外关键词。
3.5.3 关系模型的特点
第三章
数据模型及其设计
数据库基础
主要内容:
数据库数据主要特性 数据抽象过程 数据模型的基本概念 概念模型设计 关系数据模型 关系模型设计 关系数据库创建 数据装入
3.1 数据库数据主要特性
结构化特性(structural) 持久性特性(persistence) 海量特性(great capacity) 有效性特性(effectiveness)
个体或事物
对象 个体集合) (个体集合)
组织
规则
活动 活动
第三章 实体模型-4
第三章Solids Modeling 实体模型第一节实体概念什么是实体模型实体相关术语实体文件实体模型的应用什么是实体模型?实体模型是一个三维的数据三角网. 例如,一张3DM就是通过用包裹一个DTM的方式而形成的一种实体形式,用线条描述了通过实体的剖面。
实体模型与DTM(数字化地形图)基于同样的原理,在Surpac中已经使用很多年了。
您也许已经听说过与实体模型相关的3DM或者“线框模型”等概念。
实体模型用多边形联结来定义一个实体或空心体,所产生的实体用于:∙可视化∙体积计算∙在任意方向上产生剖面∙与来自于地质数据库的数据相交DTM是用于定义一个表面的。
在Surpac中,DTM的创建是自动的。
三角网的创建是通过计算将大批的三维空间点计算到X-Y平面上联结形成的。
实体模型是能过将线中所含的点联结为一系列三角形建立起来的。
这些三角形在平面上看可能是重叠的,但实际上在三维空间里就不是重叠或相交的了。
实体模型的三角网可以很彻底地闭合为一个空间结构。
尽管在Surpac中有很多工具能自动地完成很多过程,但是创建一个实体模型要比创建一个DTM需要更多的交互过程。
下图就是一个实体模型的例子(地下矿山设计和矿体).实体术语一个实体模型是由一系列不重叠的三角形联结而形成的。
实体的这些三角形可以用1到32,000的数字进行标识。
体(体)表示了实体中不连续的部件。
例如在上图,下山和矿体都有不同的体数字标识,因为它们表示不同的部件。
然而,像矿体一样,体里可能包含有一小群相对独立的细节,你又想给它们相同的体标识号以表示它们是相同结构的,这时,每一个小部分必须再给予三角网(三角网)号,一个三角网三角网是体的一部分,您可以给它赋以任何正整数。
体与三角网号涉及到实体模型中的所有部件。
体和三角网可以是开放的或者是闭合的。
在组成三角网的三角形之间如果存在缝隙,那么它就是开放的。
一个体可以包含开放的或者是闭合的三角网。
区分体为开放的或者是闭合的,其原因在于:∙一个闭合的体可以通过计算每个三角形到任一平面的体积关系来得出体的体积。
数据库概论复习题--最新题目

数据库概论复习题一、选择题1.描述事物的符号记录称为____B____。
A、信息B、数据C、记录D、记录集合2. _C___是长期存储在计算机内的有组织,可共享的数据集合。
A、数据库管理系统B、数据库系统C、数据库D、文件组织3.___B__是位于用户与操作系统之间的一层数据管理软件。
A、数据库系统B、数据库管理系统C、数据库D、数据库应用系统4.数据库系统不仅包括数据库本身,还要包括相应的硬件、软件和__A___。
A、数据库管理系统 B、数据库应用系统C、数据库应用系统D、各类相关人员5.在人工管理阶段,数据是___C__。
A、有结构的B、无结构的C、整体无结构,记录内有结构D、整体结构化的6.在数据库系统阶段,数据是__D___。
A、有结构的B、无结构的C、整体无结构,记录内有结构D、整体结构化的7. 在文件系统阶段,数据__B___A、无独立性B、独立性差C、具有物理独立性D、具有逻辑独立性8.常见的数据模型是 A .A.层次模型、网状模型、关系模型B.概念模型、实体模型、关系模型C.对象模型、外部模型、内部模型D.逻辑模型、概念模型、关系模型9.非关系模型中数据结构的基本单位是__C___。
A、两个记录型间的联系B、记录C、基本层次联系D、实体间多对多的联系10.数据的正确、有效和相容称之为数据的__D___。
A、安全性B、一致性C、独立性D、完整性11.在数据模型的三要素中,数据的约束条件规定数据及其联系的__B___。
A、动态特性B、制约和依存规则C、静态特性D、数据结构12.__B___属于信息世界的模型,实际上是现实世界到机器世界的一个中间层次。
A、数据模型B、概念模型C、E-R图D、关系模型13.在对层次数据库进行操作时,如果删除双亲结点,则相应的子女结点值也被同时删除。
这是由层次模型的___C__决定的。
A、数据结构B、数据操作C、完整性约束D、缺陷16. 数据库系统软件包括__B___和_____。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
回扣点十“4个”实体模型和“12个”运动模型分析
1.“4个”实体模型
(1)质点:形状和大小对研究问题的影响可以忽略不计,只考虑物体的质量.
(2)点电荷:形状和大小对研究问题的影响忽略不计的带电体.
(3)理想气体:常温常压下的气体,或者不计分子间的相互作用和分子势能的实际气体.
(4)柱状模型:有气体、液体和固体三种柱状模型,主要应用于研究风能、喷泉或者电流微观表达式及电流的形成.
2.运动模型
(1)匀速运动:F合=0
(2)匀变速直线运动:F合≠0且恒定,F合与速度v方向共线.
(3)匀速圆周运动:F合=F向且大小恒定,F合与速度v方向垂直.
(4)平抛运动(类平抛运动):把运动沿初速度方向和垂直初速度方向分解
(5)自由落体运动:只受重力,加速度为重力加速度,匀变速直线运动的规律都适用.
(6)竖直上抛运动(类竖直上抛运动):例如沿光滑斜面上升的物体返回出发点.
(7)连接体模型:整体法与隔离法结合牛顿第二定律分析.
(8)直线+平抛+圆周运动模型:分过程分析运动特点,利用相应规律分析,分析运动转折点的速度是解题关键.
(9)粒子在组合场内的运动模型:
电场内直线+磁场内圆周运动;电场内偏转+磁场内圆周运动;磁场内的圆周运动+磁场内的圆周运动
解题关键:一是要分过程画好运动轨迹;二是要分析好转折点的速度;三是要注意运动的周期性
(10)传送带模型:实质是相对运动的分析,解题方法主要应用动力学和能量观点
(11)板块模型:实质也是相对运动问题,解题方法主要应用动力学方法、动量和能量观点.
(12)碰撞模型:系统满足动量和能量守恒。