两种轮式月球车悬架方案及其虚拟样机仿真
基于虚拟样机模型的车辆蓄能悬架联合仿真研究

图 2 a 中齿条 和箱 体分 别为元 件 的两个端 点设施 () 加 于两个 端点 上 的力 F为大小 相 等 而方 向相 反 的压力
时, 力 为 正 , 个 端点 上 相应 的速 度 为 和 : 相对 两 ,
架, 通过仿 真分 析 , 蓄能 悬架 在 不 同类 型 的 激励 作 用 对
下 的动态 响应 进 行 初 步研 究 , 以掌握 蓄 能 悬 架 的性 能 特点, 为开展 蓄能悬架 的应 用研究 打下 基础 。
弹 簧 阻 阻 尼 Nhomakorabea 尼 器
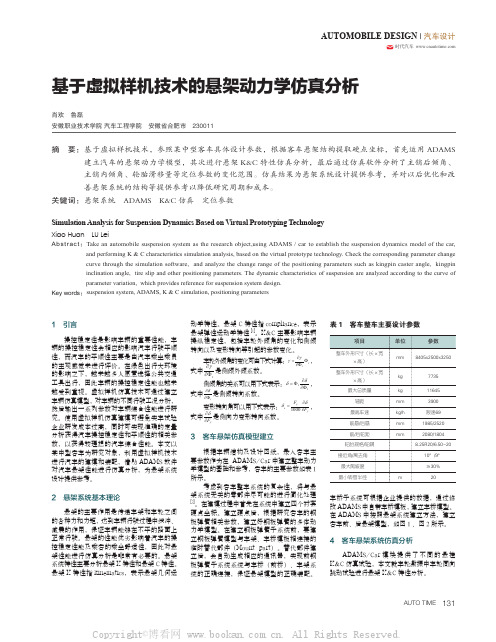
1 蓄 能 悬 架 系统 结构 和 组成
() 蓄能悬架 b
图 1 两 种 悬 架 结 构 比较
F g 1 Two tp s o us e in sr cu e i. y e fs p nso tu t r
1 2 惯性 蓄能 器的工 作原 理 .
的电流 , 用机械元件两端 的速度差来模 拟 电学元件两
端 的 电位 差 ( 电压 )类 比电学元件 的特性 可 知 , , 弹簧 具
1 1 蓄能 悬架 的设计 理论基 础 .
() 传统悬架 a
阻 尼
器
根据 机 电系 统 相 似 性 理 论 , “ 电阻 )一L( 由 R( 电
感) ( 一C 电容 ) 组成 的 电路 动态 特 性 的微 分 方程 与 描 ” 述 由“ 质量 ) ( 簧 )一 ( m( 一k 弹 C 阻尼器 ) 组 成 的机械 系 ” 统 动态特性 的微 分方 程是 完 全相 似 的 J 。按 照机 电模 拟方 法 , 可用 机 械元 件 所 受 的力来 模 拟 通 过 电 学元 件
新型八轮月球车悬架的研制

万方数据 万方数据2008年7月高海波等:新型八轮月球车悬架的研制臂连接;副摇臂上安装2个中间轮,副摇臂通过铰链与后主摇臂的前端连接;后主摇臂的后端连接1个转向机构,该转向机构与后轮相连;摇臂连接杆和摆杆通过铰链将前、后主摇臂连接在一起,摇臂连接杆通过差动机构与车载平台相连,摆杆位于主摇臂的上方。
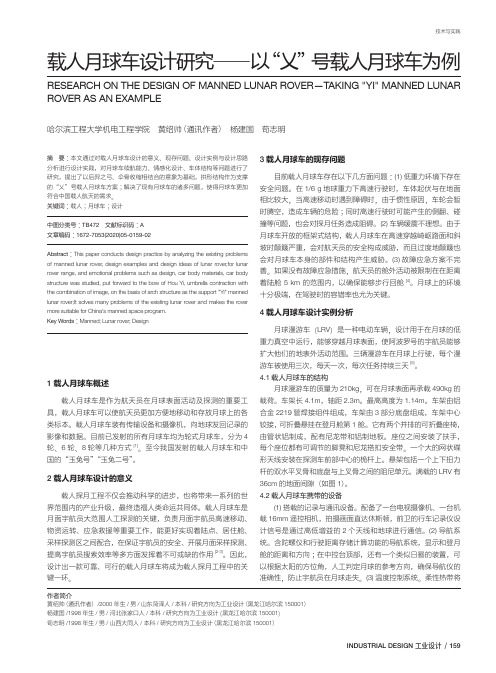
图3方案2的单侧悬架结构示意图方案2的悬架具有以下优点。
(1)结构对称,重力在各轮上均匀分配,电动机驱动功率一致。
(2)8个驱动轮与月面接触,接地比压小,有利于减小行驶阻力。
(3)主车体由差动装置与悬架相连接,可调节月球车两侧驱动轮接触不同地形差异,保证其主车体承受两侧悬架扰动的均值,增强了主车体姿态的平稳性。
方案2的悬架具有的缺点:悬架较复杂。
1.2两种八轮悬架方案的仿真比较用ADAMS软件进行仿真分析,为使两种方案具有可比性,设定以下仿真原则。
(1)两种方案ADAMS模型的最大三维包络尺寸相同。
(2)每个驱动轮驱动力矩相同。
(3)车载平台质量相同。
(4)车轮均采用光滑驱动轮,轮径、质量均相同。
(5)车体最小离地间隙相同。
(6)仿真的路面条件相同。
1.2.1双侧车轮同时跨越垂直障碍比较垂直障碍是各种障碍路面中条件最恶劣的一种,通过比较跨越垂直障碍的情况,能够反映两种方案越障性能的优劣。
判断依据:在相同条件下相同时间内,在同一设有垂直障碍的路面上行驶的距离越长说明越障越容易,即越障能力越强。
方案l在ADAMS中仿真完毕后从其后处理文件中可得到时间位移曲线,如图4a所示,50S后的位移是2855mm;同理,方案2的时间位移曲线如图4b所示,50s后的位移是3248min。
3·3‘吕2·≥2.彗-.1·O.图4质心位移曲线图比较两种方案模型越障的结果,方案2在50S内通过的距离大于方案1,而且当障碍高度提高后,通过仿真发现,方案1的越障能力远不如方案2。
因此,方案2的越障性能强于方案1。
遥操作训练仿真系统的月球车虚拟样机设计

遥操作训练仿真系统的月球车虚拟样机设计
苗毅;周倜
【期刊名称】《系统仿真学报》
【年(卷),期】2016(28)11
【摘要】为适应遥操作训练仿真的需要,研究了基于ADAMS的月球车虚拟样机仿真建模方法,提出了月球车仿真系统框架,建立了月球车本体三维模型,分析了各部件之间的相对运动关系,并对相对固定的部件进行了组合划分,为存在相对运动的部件采用运动副建立了约束关系模型,并采用驱动的方式为各部件的相对运动添加动力力矩。
设计了一系列的实验验证太阳翼等活动机构对月球车运动过程中遥测参数仿真的影响。
实验结果表明,提出的月球车虚拟样机模型实现了符合机械运动学特征的月面行走与探测仿真,为遥操作训练提供了逼真的训练数据。
【总页数】8页(P2701-2708)
【作者】苗毅;周倜
【作者单位】北京航天飞行控制中心
【正文语种】中文
【中图分类】TP391
【相关文献】
1.仿生轮腿式月球车运动学建模与虚拟样机仿真分析
2.两种轮式月球车悬架方案及其虚拟样机仿真
3.基于虚拟现实的预测仿真遥操作系统
4.在线修正虚拟仿真预测的遥操作机器人系统
因版权原因,仅展示原文概要,查看原文内容请购买。
基于虚拟样机技术的悬架动力学仿真分析
Simulation Analysis for Suspension Dynamics Based on Virtual Prototyping Technology Xiao Huan LU Lei
A b s t r a c t :Take an automobile suspension system as the research object,using ADAMS / car to establish the suspension dynamics model of the car, and performing K & C characteristics simulation analysis, based on the virtual prototype technology. Check the corresponding parameter change curve through the simulation software, and analyze the change range of the positioning parameters such as kingpin caster angle, kingpin inclination angle, tire slip and other positioning parameters. The dynamic characteristics of suspension are analyzed according to the curve of parameter variation, which provides reference for suspension system design.
多功能装载机基于虚拟样机的综合仿真与优化开题报告
多功能装载机基于虚拟样机的综合仿真与优化开题报告一、选题背景多功能装载机是一种目前广泛应用于建筑工地、矿山、码头等场所的重型机械设备,具有操作灵活、效率高等优点。
然而,多功能装载机的结构复杂,关键部件的运动学特性较难直接观测,因此在设计、制造和改进过程中需要进行仿真分析以保证性能和可靠性。
为提高多功能装载机的设计和制造效率,采用虚拟样机技术和综合仿真技术是当前的发展趋势。
虚拟样机技术可以在计算机上构建三维模型,并模拟多功能装载机的运动学和动力学特性,从而可以更加直观地理解和分析机器的性能和优化方案。
综合仿真技术能够将虚拟样机和相关的测试数据进行整合,可以对机器的不同部分和系统进行优化,从而进一步提高多功能装载机的性能和可靠性。
因此,本文主要研究多功能装载机基于虚拟样机的综合仿真与优化,以提高相关设计和制造的效率和质量。
二、研究内容本文将主要包括以下内容:1.多功能装载机的运动学和动力学分析。
基于虚拟样机技术,构建多功能装载机的三维模型,并建立运动学和动力学模型,分析关键部件的运动特性;2.多功能装载机的综合仿真技术研究。
应用综合仿真技术对多功能装载机的运动学和动力学进行综合仿真,模拟机器的工作过程和环境条件,并对其性能进行评估;3.多功能装载机的优化研究。
结合综合仿真结果,对机器的不同部分和系统进行优化,提高多功能装载机的性能和可靠性;4.实验验证和分析。
基于实际测试数据,验证虚拟样机的准确性和仿真结果的可靠性,并对优化方案进行分析和评估。
三、预期成果本文预期达到以下研究成果:1.构建多功能装载机的三维虚拟样机,并建立运动学和动力学模型;2.应用综合仿真技术对多功能装载机进行仿真,以评估其性能;3.通过优化方案,提高多功能装载机的性能和可靠性;4.验证虚拟样机的准确性和优化方案的有效性。
四、研究意义本文的研究意义主要体现在以下几个方面:1.提高多功能装载机的设计和制造效率,降低成本;2.提高多功能装载机的性能和可靠性,提高其使用价值;3.为相关领域的研究提供新的思路和方法。
分箱体式月球车虚拟样机的设计和分析
学位论文作者签名:王经国
日期:
2007 年 2 月 10 日
上海交通大学 学位论文版权使用授权书
本学位论文作者完全了解学校有关保留、使用学位论文的规定, 同意学校保留并向国家有关部门或机构送交论文的复印件和电子版, 允许论文被查阅和借阅。 本人授权上海交通大学可以将本学位论文的 全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫 描等复制手段保存和汇编本学位论文。 保密□,在 本学位论文属于 不保密√。 (请在以上方框内打“√” ) 年解密后适用本授权书。
索杰纳 Sojourner
图 1-2 Fig .1-2
勇气号 The Mars rover Spirit
轮式机器人按车轮的数量可以分为单轮、 三轮、 四轮、 五轮、 六轮和多轮等类型, 但使用最为广泛的是六轮机器人,其中具有代表性的是美国 JPL 设计的 MFEX (Microrover Flight Experiment) 小 型 漫 游 车 [16,17,18,19,20] , FIDO[21,22] 和 前 苏 联 Marsokhod 火星探测车[23]等。JPL 在星球表面科学探测漫游车技术方面,代表了这个 领域的最高水平。 以 Rocky-7 为例,如图 1-3 所示,它采用六轮摇臂悬吊机械机构, 单侧悬架包括主摇臂、副摇臂、前后四个主动轮以及中间的从动轮。当越障时,通过 副摇臂的转动,并借助中间轮调整重力在各轮的分力。
关键词:分箱体式月球车,虚拟样机,越障,转向分析
第
I
页
上海交通大学硕士学位论文
ABSTRACT
Design and Analysis of Two-body Lunar Rover Based On Virtual Prototyping
基于ADAMS的载人月球车性能分析

软 的月壤 中打 滑 而 失 去 移 动 能 力 。在 建 立 月 球 车
虚拟 样机模 型时 , 采用 A A D MS自带 的 te 型来模 i模 r
性能 和抗倾 覆性 能 , 小 的转 弯半 径 能 使 月球 车 绕 较 过月 面上密 布 的撞 击 坑 , 即便是 月 球 车 陷入 到撞 击
坑 内或 者遇 到视角 盲 区 , 图 1 示 , 见 所 良好 的抗倾覆
拟月球 车车 轮 , 考 虑 车 轮 滑 移 率 的影 响 , 用 复 为 选 合 滑移 特性较 好 的 U A轮 胎模 型 , 以通 过改 变动 、 可
静 摩擦 系数 的 大小 来 模 拟 胎 面 表 面 V形 钛 片 的功 用 。根据 车 轮 与 月 壤 相互 作 用 模 型 设 置 车 轮 的各 种 特性参 数见 表 1 。
表 1 车轮特性 参数
参数 数值
性能也 能保证 月球 车不发 生翻 到 。
图 1 视角盲 区可能造成月球 车倾覆
车轮 半 径
径 向刚 度
滚 动 阻 力 系 数
1 模型的建立
仿 真分 析前建 立 虚 拟 样机 模 型 , 括 月球 车 车 包
径 向阻 尼 动 摩 擦 因 素 静 摩 擦 因 素
⑥ 2 1 SiTc . nn . 0 0 c. eh E gg
基于 A A D MS的载 人 月球 车性 能分 析
黄 淼 聂 宏 陈金 宝
( 南京航 空航天大学航空宇航学 院, 南京 20 1 ) 0 6 1
摘
要 以载人月球车为研究对 象, 对月球车转弯性能和抗倾覆性 能进行 了理论分析 。利用 P T A A R N和 A A S建 立 了月球 D M
基于虚拟样机的多轴特种车辆整车平顺性研究

基于虚拟样机的多轴特种车辆整车平顺性研究1 前言笔者在文献[1]中基于多体动力学软件Motion建立驾驶室动力学模型,采用正交试验设计方法与试验设计(DOE)相结合的方法[2][3],对驾驶室悬置系统参数进行优化,优化方案参数为驾驶室后悬置的垂直方向刚度和阻尼共4个参数,以驾驶室座椅地板处垂直方向加速度均方根值为优化目标。
文献[1]中仅建立单独的单边驾驶室模型进行驾驶室悬置参数优化。
本文在文献[1]的驾驶室悬置优化方案基础上,基于多体动力学软件Motion建立包含驾驶室及其悬置系统、上装和车架、悬架及车轮系统的整车多体动力学模型,与基于液压仿真软件Amesim 建立的悬架液压模型进行联合仿真,分析各种工况下驾驶室悬置优化方案对整车平顺性的影响。
2 整车联合仿真模型建立2.1 整车多体动力学模型建立2.1.1 设置建模基本环境(1)设置主参考系以回转支耳的中心线与汽车纵向对称面的交点作为主参考系坐标原点。
x轴指向汽车行驶的正前方,y轴指向汽车的左侧,z轴垂直指向上方。
(2)选择系统单位长度单位为mm,质量单位为kg,力的单位为N,时间单位为s,角度单位为°,频率单位为Hz。
(3)将重力加速度设为-9.807,负号表示方向向下,单位为错误!未找到引用源。
2.1.2 驾驶室及其悬置系统模型建立多轴特种车辆驾驶室是分体驾驶室,左右单体驾驶室的质量是一致的,悬置方式和位置是左右对称。
驾驶室模型包括驾驶室、驾驶室座椅和驾驶室悬置系统,动力学模型如图1所示。
图1 驾驶室多体动力学模型2.1.3 上装和车架模型建立在多体动力学软件Motion中将上装及车架当作刚体来考虑,导入实体模型,赋予质心、质量、转动惯量等参数完成刚性部件建模。
上装模型与车架模型通过三个连接副相连,连接副位置分别分布在后托座左、右回转支耳处及前托座中心处。
后托座左回转支耳处连接副约束了x、y、z三个方向的平移,后托座右回转支耳处连接副约束x、z两个方向的平移,前托座中心处连接副约束了y、z两个方向的平移和绕x轴的转动。
月球探测车轮土交互作用实验设计与仿真分析
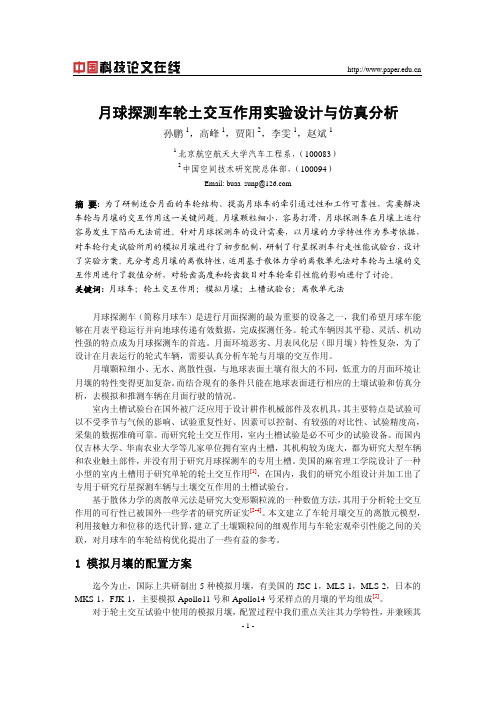
月球探测车轮土交互作用实验设计与仿真分析孙鹏1,高峰1,贾阳2,李雯1,赵斌11北京航空航天大学汽车工程系,(100083)2中国空间技术研究院总体部,(100094)Email: buaa_sunp@摘要: 为了研制适合月面的车轮结构、提高月球车的牵引通过性和工作可靠性,需要解决车轮与月壤的交互作用这一关键问题。
月壤颗粒细小,容易打滑,月球探测车在月壤上运行容易发生下陷而无法前进。
针对月球探测车的设计需要,以月壤的力学特性作为参考依据,对车轮行走试验所用的模拟月壤进行了初步配制,研制了行星探测车行走性能试验台,设计了实验方案。
充分考虑月壤的离散特性,运用基于散体力学的离散单元法对车轮与土壤的交互作用进行了数值分析,对轮齿高度和轮齿数目对车轮牵引性能的影响进行了讨论。
关键词: 月球车;轮土交互作用;模拟月壤;土槽试验台;离散单元法月球探测车(简称月球车)是进行月面探测的最为重要的设备之一,我们希望月球车能够在月表平稳运行并向地球传递有效数据,完成探测任务。
轮式车辆因其平稳、灵活、机动性强的特点成为月球探测车的首选。
月面环境恶劣、月表风化层(即月壤)特性复杂,为了设计在月表运行的轮式车辆,需要认真分析车轮与月壤的交互作用。
月壤颗粒细小、无水、离散性强,与地球表面土壤有很大的不同,低重力的月面环境让月壤的特性变得更加复杂。
而结合现有的条件只能在地球表面进行相应的土壤试验和仿真分析,去模拟和推测车辆在月面行驶的情况。
室内土槽试验台在国外被广泛应用于设计耕作机械部件及农机具,其主要特点是试验可以不受季节与气候的影响、试验重复性好、因素可以控制、有较强的对比性、试验精度高,采集的数据准确可靠。
而研究轮土交互作用,室内土槽试验是必不可少的试验设备。
而国内仅吉林大学、华南农业大学等几家单位拥有室内土槽,其机构较为庞大,都为研究大型车辆和农业触土部件,并没有用于研究月球探测车的专用土槽。
美国的麻省理工学院设计了一种小型的室内土槽用于研究单轮的轮土交互作用[1],在国内,我们的研究小组设计并加工出了专用于研究行星探测车辆与土壤交互作用的土槽试验台。
月球车刚性车轮与模拟月壤相互作用有限元仿真和试验验证
2 1 年 2月 00
强 度 与 环 境
S TRUCTURE & ENVI RONM ENT ENGI NEERI NG
Fe . 0 0 b2 1 Vo . 7 No 1 1 , . 3
第 3 卷第 1 7 期
月球车 刚性车轮与模拟 月壤相互作用有 限元
仿 真 和试 验 验 证
杨 艳静 向树红
( 北京卫 星环境工程研 究所 ,北京 10 9 ) 0 0 4
摘 要 : 据 三 轴 试 验 结 果 获 得 了模 拟 月 壤 的 模 型 参 数 ,在 A AQ 根 B US中基 于 修 正 的 Drc e rgr a ukr ae p P C 弹 塑 性 模 型建 立 了 模拟 月 壤 的 仿 真 模 型 ,并 通 过 仿 真 的 压 板 沉 陷试 验 对 试 验 测 到 的 模 型 参 数 进 行 校
Fi t l m e i u a i n a x r m e a ld to ft nt r c i n niee e ntsm l to nd e pe i nt l va i a i n o i e a to he
新型月球车悬架的设计与仿真研究

新型月球车悬架的设计与仿真研究CHEN Bai-chao, WANG Rong-ben, Y ANG Lu, JIN Li-sheng, GUO Lie摘要:这篇论文提出了一种新的月球车悬架形式。
这种悬架主要由一个主动四边形杠杆机构和一个被动四边形杠杆机构组成。
这种悬架是依照以下几种因素来设计:爬上障碍物,适应地形,行动顺畅,以及驾驶室负荷平均分配到各个车轮上。
在文章中,先是藐视了这种新型悬架的构造,接着进行了杠杆运动学分析并建立了杠杆关系的方程,因此悬架的变形能力是已知的。
为了测试悬架的性能,我们设计了一辆装有这种新型悬架的原型车用以进行爬障碍的实验,实验的结果表示这种新型悬架的应用使得月球车在使驾驶室保持平稳的前提下爬越障碍的能力非常出色。
在试验中发现的缺点的基础上,我们优化了杠杆机构,并建立了装有这种新型悬架和基于ADAMS平台的摇臂转向悬架的月球车模型,随后进行了仿真实验以比较性能。
对这种新型悬架的深入研究还在继续进行中以便于提高其整体表现。
中国已经决定在不就得将来开展探月计划。
这种新型悬架将会提供非常有价值的技术支持。
1.简介中国期望在2012年将月球车送上月球进行探月计划。
所以,一些机构和高校研究所都积极参与到与探月车相关领域的研究中。
由于探月车的运动系统上要装载探测仪器,运动的平顺性就显得十分重要。
为了保证探测工作的安全性,中国吉林大学在2004年为探月车发明了一种新型的悬架系统。
这种悬架机构主要由一个主动四边形杠杆机构和一个被动四边形杠杆机构组成。
实验的结果表示这种新型悬架的应用使得月球车在使驾驶室保持平稳的前提下爬越障碍的能力非常出色。
这种新型悬架将在不久的探月计划中提供有力的技术支持。
2.障碍分析当车轮遇到障碍物是悬架杠杆上的受力情况如图1所示。
Gw是该轮所受的重力。
Fm是车轮作用在悬架杠杆上的合力。
θ是Fm与水平方向的夹角。
G是整车重量。
Φ是路面与车轮之间的附着系数。
Ψ是路面阻力系数。
载人月球车设计研究——以“乂”号载人月球车为例
技术与实践INDUSTRIAL DESIGN 工业设计 / 159载人月球车设计研究――以“乂”号载人月球车为例RESEARCH ON THE DESIGN OF MANNED LUNAR ROVER—TAKING "YI" MANNED LUNAR ROVER AS AN EXAMPLE哈尔滨工程大学机电工程学院 黄绍帅(通讯作者) 杨建国 苟志明3载人月球车的现存问题目前载人月球车存在以下几方面问题:(1)低重力环境下存在安全问题。
在1/6 g 地球重力下高速行驶时,车体起伏与在地面相比较大,当高速移动时遇到障碍时,由于惯性原因,车轮会暂时腾空,造成车辆的危险;同时高速行驶时可能产生的侧翻、碰撞等问题,也会对探月任务造成阻碍。
(2)车辆缓震不理想。
由于月球车开放的框架式结构, 载人月球车在高速穿越崎岖路面和斜坡时颠簸严重,会对航天员的安全构成威胁,而且过度地颠簸也会对月球车本身的部件和结构产生威胁。
(3)故障应急方案不完善。
如果没有故障应急措施,航天员的舱外活动被限制在在距离着陆舱 5 km 的范围内,以确保能够步行回舱[4]。
月球上的环境十分极端,在驾驶时的容错率也尤为关键。
4载人月球车设计实例分析月球漫游车(LRV )是一种电动车辆,设计用于在月球的低重力真空中运行,能够穿越月球表面,使阿波罗号的宇航员能够扩大他们的地表外活动范围。
三辆漫游车在月球上行驶,每个漫游车被使用三次,每天一次,每次任务持续三天[5]。
4.1载人月球车的结构月球漫游车的质量为210kg ,可在月球表面再承载490kg 的载荷。
车架长4.1m ,轴距2.3m 。
最高高度为1.14m 。
车架由铝合金2219管焊接组件组成,车架由3部分底盘组成,车架中心铰接,可折叠悬挂在登月舱第1舱。
它有两个并排的可折叠座椅,由管状铝制成,配有尼龙带和铝制地板。
座位之间安装了扶手,每个座位都有可调节的脚凳和尼龙搭扣安全带。
月球车沙地行驶动力学建模与仿真

第47卷第23期机械工程学报V.01.47No.23 20I1年12月J O U R N A L O F MECHANICAL ENGINEERING Dec. 2 O1lDoI:10.3901/JME.2011.23.097月球车沙地行驶动力学建模与仿真★马传帅1,2文桂林1,2周景宇1,2韩汪利1,2戴意愿1,2(1.湖南大学汽车车身先进设计与制造国家重点实验室长沙410082:2.湖南大学特种装备先进设计技术与仿真教育部重点实验室长沙410082)摘要:提出建立刚性车轮在松软路面行驶的动力学模型的新方法。
该方法对车轮进行离散化处理,基于沉陷理论、剪切理论和被动土压理论预测轮壤接触表面的相互作用力,从而可以对车轮表面的应力分布以及电动机转矩进行分析。
进一步地将子模型整合到主副摇臂月球车悬架系统中,建立在松软干砂表面行驶的动力学模型。
通过仿真,对移动系统中各个车轮表面的应力分布以及驱动电动机转矩进行分析。
为验证模型的正确性,开发了信号处理模块和主副摇臂移动系统试验平台,开展主副摇臂月球车移动系统在干沙表面的移动性能试验研究,对仿真和试验中的车轮功耗以及滑移率进行比较。
结果表明主副摇臂移动系统动力学模型具有较好的可信性,该建模方法可以用于高效率的多轮多轴月球车的动力学分析。
关键词:轮壤模型月球车有齿刚性轮移动性能中图分类号:039U489V476Whole—vehicle Dynamical Model and Simulation for Lun arRover Traveli ng on the Loo se So ilMA Ch uans hua il'2WEN Guilinl·2Z H O U J ing yu l,2H A N Wanglil’2DAI Yiyuan l,2(1.State Key Laboratory ofAdvanced Design and Manufacture for Vehicle nody,Hunan Uni vers ity,Chan gsha 410082;2.Key Laboratory ofAdvanced Design and Simulation Techniqu es for Special Eq uip men t of Min istry of二Education,Hunan University,Changsha 410082)Ab s tr a ct:B a s ed O i l the s in k a ge-p r es s u re theory,the s t r es s-d i s p l ac e m e n t r e la ti on sh ip an d t he theory of pas sive ea rt h pr es su re,t he dy na mi ca l wheel-soil i nt er a ct io n mo de l is buil t to sim u l at e th e i nt er act iv e beh avior b et we en th e wh ee l with g ro u s er s an d dry-sandsoil.the s tress d is tr ib ut io n andtor q u es of t he w hee ls c a l lbepr e d i c te d using this m o d e l.I n t e g r a t i ng t h e su b-m od el wittl r o c k e r-bo g i esuspensions of the lu na r rove r,the d yna mic al mo d e l of t he mobility syste m i s d eve lop ed to in ve s ti ga te t he of f-r oa d pe rform ance i n c lu d i n g th edist ri bu ti on of th e str e s s a cti ng∞th e interf ac e betw ee n the whe els and soil and t o r q u e of th e w heel while th e r o v e r trav els o n the l o os e so il.In o r d e r to val id this model,the test bed of the rocker-bogle mobility system a nd s in gl e p r o c e s s i n g a r e deve lop ed.Th e accuro.cy an d reliabi lity oft he mo de l a∞v e r if i e d by some experiments.The c om pa ri s on b et we en the mea sur ed results a nd s i m u l a t io n res ult s i nd ic a te s t hat this model is v al i da t e d and csn be used to inve st i ga te th e per fo rm an c e of the multi—wheel r o v er tr av el in g o n the lo o s e soil.Ke y word s:W hee l-so il mod e l Lu n ar ro v e r Wheel讷th grousers Mobility syst em探测范围的移动能力。
汽车悬架动力学建模与仿真分析

汽车悬架动力学建模与仿真分析
张慧杰;郭志平;郝慧荣
【期刊名称】《机械设计与制造》
【年(卷),期】2015(000)001
【摘要】建立了基于SimMechnics的悬架模型,该模型能更真实的反映悬架特性,并且根据实际工程应用场合的不同,此模型还能方便的进行扩展或缩减,无需复杂的数学推导.应用此模型对汽车悬架在多种工况下进行了仿真,结果表明车身的俯仰或侧倾运动对汽车行驶加速度敏感,且加速度绝对值越大,车身俯仰或侧倾运动越剧烈;在转弯工况下对汽车转向角敏感.基于SimMechnics悬架模型的建立和仿真分析,为全车悬架的主动控制研究提供了更贴近工程实际的被控对象模型.
【总页数】4页(P66-68,73)
【作者】张慧杰;郭志平;郝慧荣
【作者单位】内蒙古工业大学能源与动力工程学院,内蒙古呼和浩特010051;内蒙古工业大学机械学院,内蒙古呼和浩特010051;66265部队,内蒙古呼和浩特010000
【正文语种】中文
【中图分类】TH16;U463
【相关文献】
1.基于SolidWorks/ADAMS的汽车悬架设计与仿真分析 [J], 蒋尊义; 唐笑影; 杜天德; 刘畅; 胡辰
2.基于SolidWorks/ADAMS的汽车悬架设计与仿真分析 [J], 蒋尊义; 唐笑影; 杜天德; 刘畅; 胡辰
3.基于Simulink的汽车悬架参数对其性能影响的仿真分析 [J], 徐颖航;覃旺桥;艾天乐
4.基于Simulink的汽车悬架参数对其性能影响的仿真分析 [J], 徐颖航;覃旺桥;艾天乐
5.基于ANSYS Workbench的汽车悬架系统的仿真分析 [J], 陈海清;袁超;王明杰;张子豪
因版权原因,仅展示原文概要,查看原文内容请购买。
载人月球车馈能悬架技术及其AMESim仿真分析
载人月球车馈能悬架技术及其AMESim仿真分析张晓露;李舜酩【摘要】基于载人月球车对行驶速度、乘坐舒适性及能量储备的要求,提出一种滚珠丝杠式馈能悬架技术方案.分析了其结构、馈能原理及悬架输出力,利用AMESim 软件建立了传统悬架系统和馈能悬架系统模型,在阶跃激励和正弦激励下仿真了其车身加速度和车轮动载.结果表明,馈能悬架系统的两项评价指标较传统悬架小,其平顺性和稳定性更好,能够为可靠的月面运行提供保障.【期刊名称】《科学技术与工程》【年(卷),期】2014(014)022【总页数】5页(P312-316)【关键词】月球车;馈能悬架;AMESim;仿真【作者】张晓露;李舜酩【作者单位】南京航空航天大学能源与动力学院,南京210016;南京航空航天大学能源与动力学院,南京210016【正文语种】中文【中图分类】V476.3悬架是月球车移动系统的重要部件,连接车轮与车体并对月球车的抗倾覆性、行驶平顺性、稳定性等移动性能有重要影响[1]。
目前,国内外所研究的无人月球车普遍采用整体协调式被动悬架[2,3],如美国系列火星探测车和中国第一辆“玉兔号”月球车均采用摇臂悬架方案;日本宇航中心、梅基大学等联合研制了Micro5五轮五点接触悬吊式悬架机构;吉林大学设计了一种对称分布的正反四边形悬架。
无人月球车悬架随动性良好且机构简单、重量轻,但无法满足载人月球车对于行驶速度、乘坐舒适性等要求。
美国载人月球车 LRV采用带杠杆导向的独立悬挂装置,由于LRV是半主动悬架,对悬架进行控制时需要外部输入能量进行调节,这对月球车的能量储存也是一种考验。
可见,传统的悬架结构可能难以保证月球表面探测任务的顺利完成,研究设计一种新型载人月球车悬架具有重要的现实意义。
馈能悬架是一种将传统悬架减振器的耗散能量进行回收利用的新型悬架[4—6]。
它主要分为两大类:液力式馈能悬架和电磁式馈能悬架。
液力式馈能悬架机构庞大,附属结构多,响应速度慢且可靠性较低,出现故障不易维修,不适合月球环境。
轮式星体探测机器人抗倾覆性研究_尚建忠
第23卷第1期2007年2月机械设计与研究Machine Design and Research Vol .23No .1Feb .,2007收稿日期:2006-08-01文章编号:100622343(2007)012040204轮式星体探测机器人抗倾覆性研究尚建忠, 罗自荣, 张志雄(国防科技大学 机电工程与自动化学院,长沙 410073,E 2mail:sjz1966@hot m ail .com ) 摘 要:建立了轮式星体探测机器人的抗倾覆性评价模型,对六轮摇臂星体探测机器人和双曲柄滑块探测机器人的抗倾覆性进行分析和比较,提出一种提高自适应悬架机器人移动性能的措施和方法,实现了一种可主动配置的六轮摇臂星体探测机器人。
仿真结果表明,通过主动配置,机器人的行驶平顺性和抗倾覆性均得到明显提高,能更好地满足探月需求。
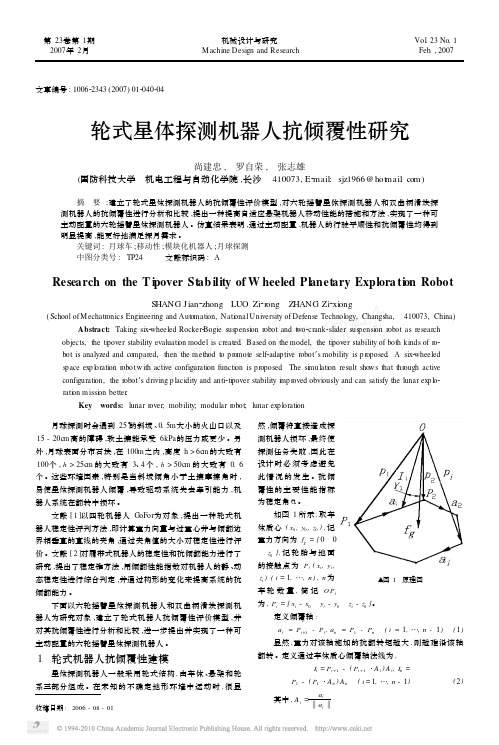
关键词:月球车;移动性;模块化机器人;月球探测中图分类号:TP24 文献标识码:AResearch on the T i pover St ab ility of W heeled Pl anet ary Explora ti on RobotSHANG J ian 2zhong LUO Zi 2r ong Z HANG Zi 2xi ong(School of Mechatr onics Engineering and Aut omati on,Nati onal University of Defense Technol ogy,Changsha, 410073,China ) Abstract:Taking six 2wheeled Rocker 2Bogie sus pensi on r obot and t w o 2crank 2slider sus pensi on r obot as researchobjects,the ti pover stability evaluati on model is created .Based on the model,the ti pover stability of both kinds of r o 2bot is analyzed and compared,then the method t o p r omote self 2adap tive r obot ′s mobility is p r oposed .A six 2wheeled s pace exp l orati on r obot with active configurati on functi on is p r oposed .The si m ulati on result shows that thr ough active configurati on,the r obot ′s driving p lacidity and anti 2ti pover stability i m p r oved obvi ously and can satisfy the lunar exp l o 2rati on m issi on better .Key words:lunar r over;mobility;modular r obot;lunar exp l orati on 月球探测时会遇到25°的斜坡、0.5m 大小的火山口以及15-20c m 高的障碍,软土壤能承受6kPa 的压力或更少。
基于虚拟样机技术月球机器人运动仿真
基于虚拟样机技术月球机器人运动仿真
王巍;梁斌;强文义
【期刊名称】《高技术通讯》
【年(卷),期】2002(012)002
【摘要】采用"虚拟样机"技术,建立一个集三维实体设计、动力学建模、控制、可视化仿真于一体的虚拟月面计算机仿真环境,对月球机器人的静力学、运动学以及动力学进行了仿真研究,为月球机器人结构参数、动力学参数及控制算法的优化提供了设计参数和验证场所.
【总页数】4页(P84-87)
【作者】王巍;梁斌;强文义
【作者单位】北京控制工程研究所空间机器人工程研究中心,北京,100080;哈尔滨工业大学控制工程系,哈尔滨,150001;北京控制工程研究所空间机器人工程研究中心,北京,100080;哈尔滨工业大学控制工程系,哈尔滨,150001
【正文语种】中文
【中图分类】TP24
【相关文献】
1.基于虚拟样机技术的汽车托森差速器蜗轮蜗杆的运动仿真方法 [J], 吴美霖
2.基于虚拟样机技术的并联机器人机构运动仿真 [J], 黄秀琴;沈惠平;杨廷力
3.基于虚拟样机技术的挖掘机工作装置运动仿真与优化设计 [J], 郭银赛;张毅;程明科
4.基于虚拟样机技术的球形机器人运动仿真研究 [J], 李团结;朱超
5.基于虚拟样机技术的双足机器人运动仿真研究 [J], 杜志江;张博;孙立宁;董为因版权原因,仅展示原文概要,查看原文内容请购买。
基于虚拟样机技术的ATV悬架仿真分析
基于虚拟样机技术的ATV悬架仿真分析
朱华
【期刊名称】《拖拉机与农用运输车》
【年(卷),期】2009(36)6
【摘要】运用虚拟样机技术,在ADAMS软件中对ATV模型进行了仿真分析。
为满足行驶平顺性指标,通过限定整车质心垂向加速度的大小对整车模型进行仿真。
仿真结果与试验结果相吻合,验证了虚拟试验的合理性和可行性,得出了需要的悬架参数,为整车性能的进一步改进提供了依据。
【总页数】2页(P78-79)
【关键词】ATV;独立悬架;虚拟样机技术;ADAMS
【作者】朱华
【作者单位】解放军汽车管理学院装备技术系
【正文语种】中文
【中图分类】U463.33
【相关文献】
1.基于虚拟样机技术的汽车悬架动力学仿真分析 [J], 邓子祥;詹建军
2.基于虚拟样机技术的双横臂前悬架系统仿真分析 [J], 罗卫平;王珺;陈曼华;姜小菁
3.基于虚拟样机技术的某轿车悬架性能仿真分析 [J], 冯敏;王猛猛;陈劭
4.基于虚拟样机技术的悬架动力学仿真分析 [J], 肖欢;鲁磊
5.基于虚拟样机技术的悬架动力学仿真分析 [J], 肖欢;鲁磊
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2. 2 虚拟样机分析及评价步骤 (1) 虚拟样机建模 月球车移动性能的虚拟
样机模型包括虚拟地面环境模型 、月球车虚拟样 机模型 、地面与机器人轮胎相互作用模型 、月球车 转向驾驶模型四部分组成 。
虚拟地面环境模型由一组模拟真实地面环境 的三角网格组成 ,根据已有月球地形知识 ,设置有 25°斜坡 、15 ~ 20cm 高的障碍以及直径约为 0. 5m 的火山口等非结构化形体 。月球车虚拟样机模型 包括车体 、悬架 、轮系等子模型 , 每一模型均由构 件 、约束和力三部分组成 。采用 ADAMS/ Tire 模 块建立地面与机器人轮胎相互作用模型 , 并设置 轮胎与地面作用的静摩擦 、动摩擦 、弹性模量 、滑 动系数等接触力参数 ,部分参数设置如表 1 所示 。 月球车转向驾驶模型通过控制 4 个角轮的转向 、 各轮系的行驶线速度等方法约束月球车的运动 , 实现预定的运行轨迹 。
双曲柄联动扭杆悬架机器人前轮越障时 ,曲 柄 1 后摆 ,滑块 1 右移 ,前轮上升 ,中间轮下降 ,如 图 3a 所示 。中间轮越障时 ,两个滑块相对滑动 , 前轮和后轮下降 ,中间轮提升 ,如图 3b 所示 。后
(a) 前轮越障
(b) 后轮越障 图 3 双曲柄滑块联动扭杆悬架越障原理
轮越障时 ,曲柄 2 前摆 ,滑块 2 左移 ,中间轮下降 , ·50 ·
后轮上升 。
2 虚拟样机评价的数学模型及步骤
2. 1 数学模型
为保证评价模型的客观性和科学性 ,对任意
空间探测任务的空间探测机器人解空间的所有方
案作如下一致性约束 : ①负载与自重相同 ; ②总体
尺寸相同 ; ③总功率相同 ; ④最高行驶速度相同 ;
⑤行驶路径相同 。
据此 ,可建立空间探测机器人移动性能评价
0 引言
移动性能是轮式月球车最基本的性能 。月球 探测对月球车的移动性能需求主要体现在地面自 适应性 、行驶平顺性 、越障性 、连续工作时间 、自主 行驶功能等方面 。月球车移动性能主要取决于悬 架和轮系 ,国内外学者提出了多种悬架结构 ,这些 悬架系统各有特点 。日本宇航中心 、梅基大学等 单位联合研制的 Micro5 采用的是一种 5 点接触 悬吊结构[1 ] ;邓宗全等[2 ] 提出的行星越障轮式月 球车越障功能很强 ,但这种结构在跨越较大障碍 时对行驶平顺性的影响较大 ;刘方湖等[3] 设计的 五轮铰接式月球机器人具有与美国节式空间探测 机器人 BlueRover 相同的特点 ,地面自适应能力 很好 ,但行驶平顺性与抗翻稳定性有待改善 ;美国 Rocky 系列探测机器人所采用的 rocker - bogie 悬架是一综合性能较好的结构[4 ,5] ,清华大学 、哈 尔滨工业大学 、国防科学技术大学研制的月球车 原理样车均有采用这种结构 。
·51 ·
中国机械工程第 17 卷第 1 期 2006 年 1 月上半月
图 6 车轮与地面接触力
图 7 越障性能评价
4 结论
本文以轮式月球车为研究对象 ,提出了三摇 臂月球车悬架和双曲柄滑块联动扭杆悬架两种新 型月球车悬架系统 ,采用虚拟样机技术从地面自 适应性 、行驶平顺性 、越障性等方面对其移动性能 进行动力学分析 。仿真结果表明 ,双曲柄联动扭 杆悬架具有很好的移动性能 。
参考文献 : [ 1 ] Yoji Kuroda , Koji Kondo , Kazuaki Nakamura , et
al. Low Power Mo bility System for Micro Planeta2 ry Rove‘r Micro5’. Fift h International Sympo sium on Artificial Intelligence ,Robotics and Auto matio n
图 2 双曲柄滑块联动扭杆悬架
左右车架采用双曲柄滑块联动结构 。双曲柄 滑块联动结构包括对称的两组曲柄滑块机构 ,两 者之间通过两根连杆实现联动 ,曲柄支座与滑块 、 滑块与滑块之间均采用弹簧连接 ,以达到减振与 保证车架行驶平顺性的目标 。双曲柄联动扭杆悬 架月球车采用六轮驱动 ,其中 4 个角轮为转向轮 , 整车有 22 个自由度 。
本文提出了两种新型月球车悬架系统 ,对基 于虚拟样机的移动性能评价理论与方法进行了初 步探讨 ,在 ADMA S 环境下对两种新型月球车悬 架系统进行了仿真分析 。
收稿日期 :2004 - 12 - 06 基金项目 :国家自然科学基金资助重点项目 (602346030)
1 两种新型轮式月球车悬架
1. 1 六轮三摇臂悬架 如图 1 所示 ,六轮三摇臂悬架由车体 、尾摇臂
另外 ,车体中心高度 、俯仰角和翻滚角变化的
一阶中心矩曲线也是空间探测机器人行驶平顺性
评价的重要依据 。
Hale Waihona Puke (3) 越障性能模型 基于一致性约束 , 质量 与功率参数一定 , 则越障性能的高低可简化为直
接采用机器人所能越过的垂直障碍的高度 h 来评
价 。h 越大 ,其越障性能越好 。
两种轮式月球车悬架方案及其虚拟样机仿真 ———尚建忠 罗自荣 张新访
表 1 地面与机器人轮胎相互作用参数
冲击力参数
摩擦力参数
刚度 k (105 N/ mm) 1. 0
静摩擦因数 f s
0. 7
阻尼η( N ·s/ mm) 10. 0
动摩擦因数 f d
0. 4
冲击力指数δ 2. 2 静摩擦转换速度 vs ( mm/ s) 0. 1
可穿透深度 hp ( mm) 0. 1 动摩擦转换速度 vd ( mm/ s) 1. 0
和两个侧摇臂组成 。尾摇臂和两个侧摇臂均可相 对车体独立摆动 ,调整六轮对地面的相对高度 ,实 现 6 个车轮对地面的自适应 。六轮三摇臂悬架月 球车采用六轮驱动 ,4 个角轮为转向轮 ,因此 ,整 车自由度数为 2 ×4 (侧摇臂) + 5 (尾摇臂) + 6 (车体) = 19 。
图 1 六轮三摇臂悬架
(2) 运行虚拟样机进行仿真分析 (3) 依据数学模型建立虚拟样机评价曲线 利用 ADMA S/ Po st Processor 模块绘制输出探测 机器人的自适应评价曲线 、行驶平顺性评价曲线 和越障性能评价曲线 。主要包括车轮与地面接触 力的一阶和二阶中心矩两组曲线车体中心高度 、 俯仰角和翻滚角的一阶和二阶中心矩 6 组曲线 , 越障性能表现为最大越障高度 。 (4) 试验设计研究 利用 ADMA S 试验设计 功能 ,对月球车虚拟样机模型的设计变量进行优 化 ,得到优化设计参数 。
关键词 :月球车 ,移动性 ,虚拟样机 ,ADAMS 中图分类号 : TP24 文章编号 :1004 - 132X(2006) 01 - 0049 - 04
Two Kinds of Wheeled Lunar Rover Suspension Scheme & Their Virtual Prototype Simulation Shang J iangzho ng1 ,2 L uo Ziro ng2 Zhang Xingfan1
两种轮式月球车悬架方案及其虚拟样机仿真 ———尚建忠 罗自荣 张新访
两种轮式月球车悬架方案及其虚拟样机仿真
尚建忠1 ,2 罗自荣2 张新访1
1. 华中科技大学 ,武汉 ,430074 2. 国防科学技术大学 ,长沙 ,410073
摘要 :提出了三摇臂悬架和双曲柄滑块联动扭杆悬架两种新型月球车悬架系统 ;建立了月 球车移动性能评价的数学模型 ;采用虚拟样机技术 ,从地面自适应 、行驶平顺性 、越障性能三个 方面对月球车的移动性能进行动力学分析 。仿真结果表明 ,双曲柄联动扭杆悬架月球车具有 很好的移动性能 。
仿真结果表明 ,双曲柄滑块联动悬架对地面 高度的变化具有相当好平滑作用 ,车体行驶车体 具有良好的平顺性和地面自适应能力 。
1. 左前轮中心高度 2. 左中轮中心高度 3. 左后轮中心高度 4. 右后轮中心高度 5. 右前轮中心高度 6 右中轮中心高度 7. 车体中心高度
图 5 车体平顺性
数学模型 。
(1) 自适应性评价模型 移动过程中的空间
探测机器人 ,随着地形的起伏 ,车轮的相对位置发
生变化 ,与之相对地表现为车轮与地面接触力 Fc 的变化 ,该变化形成一条随机曲线 Fc ( t) (图 4a) , 对其作如下处理 :
Fm ( t)
=
Fc ( t) Fp
Fp
(1)
式中 , Fp 为平地环境下车轮与地面接触力 。
则可得到单个车轮的自适应评价曲线 Fm ( t) ( 图
4b) 。
(a) 接触力曲线
( b) 自适应性评价曲线
图 4 单个车轮的评价曲线
(2) 行驶平顺性模型 机器人移动过程中 , 车体中 心 点 的 高 度 Y ( t) 也 是 一 个 随 机 过 程 , 记作 :
Y ( t) = ( y ( t1 ) , y ( t2 ) , …, y ( tn) ) , n = 1 , 2 , …, ∞
3 仿真结果
经基于虚拟样机技术的机器人移动性分析及 评价 ,认为图 2 所示的双曲柄联动扭杆悬架为相 对较优的方案 ,其部分移动性评价结果如图 5 ~ 图 7 所示 。可以看出 ,在行驶过程中 ,双曲柄联动 扭杆悬架的车轮随地面颠簸很大 ,而车体却很平 顺 ,如图 5 所示 。除少数因车轮与地面冲击接触 力发生突变外 ,接触力变化也很小 ,如图 6 所示 。 在越 110mm 高的碍障时 (图 7) ,车体高度变化也 小于 12. 5mm (图 5) ,车体的高度曲线相当平滑 。
·49 ·
中国机械工程第 17 卷第 1 期 2006 年 1 月上半月
1. 2 双曲柄联动扭杆悬架 如图 2 所示 ,双曲柄联动扭杆悬架由左车架 、
右车架 、扭杆弹簧 、车体四部分组成 。左右车架采 用花键与扭杆悬吊的两端固定 ,车体与扭杆悬吊 的中间处固定 ,在端部则可相对转动 。如此 ,车架 可相对于车体做微量转动 ,以防止机器人加减速 时因惯性冲击引发车体摆动 。