产线控制系统机器人模拟打磨工位的控制系统设计与实现
机器人控制系统的设计与实现
机器人控制系统的设计与实现在现代科技的发展下,机器人已经成为工业生产和日常生活中不可或缺的一部分。
为了更好地控制机器人的运动和操作,人们需要设计和实现一个高效可靠的机器人控制系统。
本文将介绍机器人控制系统的基本原理、设计步骤以及系统组成。
一、机器人控制系统的基本原理机器人控制系统的基本原理是通过输入控制指令,经过数据处理和运算,控制机器人执行相应动作。
机器人控制系统通常由硬件和软件两部分组成。
硬件部分包括感知装置、执行器和控制器。
感知装置用于实时获取机器人所处环境的信息,如距离、视觉、温度等数据。
执行器用于将控制信号转化为机械运动,例如驱动电机、执行臂等。
控制器是硬件部分的核心,用于接收和处理输入信号,并产生相应的控制信号给执行器。
软件部分通常包括系统软件和应用软件。
系统软件主要负责机器人的运行管理和数据处理,如操作系统、传感器驱动程序等。
应用软件则根据机器人的不同功能和任务进行开发,如工业自动化、医疗护理等领域的应用软件。
二、机器人控制系统的设计步骤1.需求分析:根据机器人的应用场景和功能需求,对控制系统的性能要求进行分析和规划。
2.系统设计:根据需求分析的结果,设计系统的硬件和软件框架。
确定感知装置、执行器和控制器的选择和集成方案,以及系统软件和应用软件的开发方案。
3.系统集成:将硬件和软件组件进行集成,并进行各组件之间的接口测试和调试。
确保硬件和软件的相互兼容和稳定性。
4.系统优化:在集成调试的基础上,对系统进行性能优化和功能增强。
通过算法优化、控制参数调整等方法,提高机器人的响应速度和运动精度。
5.系统测试:进行全面的系统测试,模拟各种工作场景和极端情况,验证控制系统的性能和可靠性。
对测试结果进行分析和修正,直到系统能够满足预期要求。
6.系统部署和维护:将经过测试和优化的机器人控制系统部署到实际应用中,并进行长期的维护和支持。
及时处理系统故障和性能下降问题,保证系统的可持续运行。
三、机器人控制系统的组成1.感知装置:包括传感器、摄像头、激光雷达等,用于获取机器人周围环境的信息,为控制系统提供输入数据。
机器人控制系统的设计与实现

机器人控制系统的设计与实现第一章:绪论近年来,随着科技的不断发展,机器人技术也日益成熟。
机器人在工业、医疗、教育等领域得到广泛应用,成为各个领域的重要助手。
机器人的智能化控制系统是机器人能够完成任务的重要保障,其设计与实现对于机器人性能的提升至关重要。
第二章:机器人控制系统的基本原理机器人控制系统包括机器人程序、控制器和传感器等部分。
机器人程序分为在线控制和离线控制两种类型。
在线控制是在机器人执行任务的同时进行程序调节,离线控制则是通过离线编程,生成机器人控制程序,在机器人执行任务时直接调用。
控制器是机器人控制系统的核心部分,其具备机器人动作控制、传感器数据采集、数据处理和通信调度等功能。
传感器负责采集环境信息,以便机器人在执行任务时作出正确的响应。
第三章:机器人控制系统设计流程机器人控制系统设计流程分为需求分析、控制策略设计、电路图设计、软件开发和系统测试等五个阶段。
需求分析环节是明确机器人应用的具体需求和参数要求。
控制策略设计包括机器人运动规划、路径规划和状态控制等,它要求控制系统要精确地控制机器人的运动和状态。
电路图设计是控制系统硬件设计,具体包括控制器的电路设计和传感器接口电路等。
软件开发包括机器人程序设计和控制器软件设计。
系统测试则是测试整个控制系统的正确性和稳定性。
第四章:机器人控制系统实现技术机器人控制系统实现技术包括单片机和计算机控制两种方式。
单片机控制是一种成本较低的控制方式,具备相对较好的实时性和稳定性,但其算法实现较为困难。
计算机控制则是一种应用较为广泛的控制方式,具备灵活性高、开发效率高等优点,但其实时性和稳定性可能受到一定影响。
第五章:机器人控制系统应用案例机器人控制系统应用案例有很多,以下以机器人农业应用为例。
机器人不仅能够在农业生产中完成地面种植任务,还可以在大棚中完成高空作业。
机器人通过传感器技术获取大棚温度、湿度等信息,实时控制大棚内的环境,确保农作物的生长环境符合标准。
机器人控制系统设计与实现

机器人控制系统设计与实现摘要:机器人控制系统是机器人技术中的核心部分,它负责对机器人进行指令控制,实现各种复杂的动作和功能。
本文将介绍机器人控制系统的设计与实现,包括系统架构、硬件设计和软件编程等关键内容。
一、引言机器人技术在工业、医疗、军事等领域有着广泛的应用,其核心就是机器人控制系统。
机器人控制系统由硬件和软件两部分组成,硬件负责接收指令和控制机器人执行动作,软件则负责对机器人进行编程和算法实现。
二、系统架构设计机器人控制系统的架构设计是整个系统开发的基础。
一个典型的机器人控制系统可以分为三个层次:感知层、决策层和执行层。
1.感知层感知层是机器人获取环境信息的部分,包括传感器和摄像头等。
传感器可以用来检测机器人与周围环境的距离、位置以及其他物理参数,而摄像头可以用于识别物体和人脸等。
2.决策层决策层是机器人控制系统的核心,它负责根据感知层获取到的信息进行决策和算法处理。
在这一层次,需要设计和实现一些算法,如路径规划、运动控制等,来实现机器人的智能决策。
3.执行层执行层是机器人根据决策层的指令执行相应动作的部分,它包括电机、舵机、液压系统等。
这些执行机构可以根据决策层的指令控制机器人的运动、抓取物体、开关等动作。
三、硬件设计硬件设计是机器人控制系统的重要组成部分,它包括电路设计、电气连接和机械结构等。
1.电路设计电路设计的关键是选择合适的传感器和执行机构,并设计相应的电路板,以实现传感器与执行机构之间的连接和信号传递。
此外,还需要设计适配电池或外部电源供电的电路。
2.电气连接电气连接是将电路板和传感器、执行机构连接起来的步骤,需要注意合理布局和连接方式,以保证电路的稳定性和可靠性。
3.机械结构机械结构是机器人控制系统的物理框架,它包括机器人的外形设计和结构组装。
设计合理的机械结构可以提高机器人的稳定性、灵活性和运动能力。
四、软件编程软件编程是机器人控制系统的关键环节,它决定了机器人能否实现各种复杂的功能和动作。
机器人控制系统的设计与实现

机器人控制系统的设计与实现机器人现在已经成为了现代工业领域中不可或缺的重要工具。
机器人能够完成各种高精度、高效率、高危险性和重复性的工作,极大地提高了公司的生产力和质量。
但是,机器人控制系统的设计与实现是机器人能够发挥作用的关键所在。
机器人控制系统是机器人的核心部分之一,它包括控制器、软件以及各种传感器等,是机器人自主完成工作的核心,也是工业机器人的核心控制平台。
机器人控制系统的设计和实现需要具备多学科融合的知识,涉及机械工程、电气工程、计算机科学、控制工程、通信技术等多方面的知识和技能。
下面将逐一介绍机器人控制系统的各个方面。
一、机器人的控制器设计机器人的控制器是机器人控制系统的核心,它采用了分层架构和模块化设计的方式,能够实现多个机器人之间的联动控制。
控制器的主要功能包括传感器采集、通信、控制和执行等,其中传感器采集和通信是机器人控制系统的关键部分。
目前市场上比较常见的机器人控制器主要有ABB、FANUC、YASKAWA等品牌。
二、机器人软件设计机器人软件设计是机器人控制系统的重要组成部分,它采用了多任务处理技术,能够快速识别和处理机器人周围环境的信息。
软件设计包括控制程序、图形界面和应用程序等,其中控制程序是整个软件的核心。
为了保证机器人控制系统的高可靠性和性能,软件设计需要使用现代软件开发方法和工具,如UML建模方法、验证技术和代码统一性测试等。
三、机器人传感器设计机器人控制系统涉及的传感器种类繁多,包括二维码扫描器、激光器、视觉传感器、力传感器等。
这些传感器需要实时采集周围环境的信息,并反馈给机器人控制系统,从而实现机器人的自主行动和精准操作。
四、机器人执行机构设计机器人执行机构是机器人控制系统的动力源,通常采用电机作为驱动器。
机器人执行机构的设计需要根据不同机器人的需求而定,同时需要保证其稳定性、精度和精度。
五、机器人通信技术机器人通信技术是机器人控制系统的重要组成部分,它采用了开放式通信协议和分布式系统架构,实现机器人设备之间的信息交换和共享。
机器人操作控制系统的设计与实现

机器人操作控制系统的设计与实现随着科技的飞速发展,机器人已经成为了各个领域的重要工具。
在工业生产、医疗保健、军事战争等领域都有着广泛的应用。
而机器人能够完成各种复杂的工作任务,其操作控制系统的设计与实现是机器人发挥作用的关键之一。
本文将就此话题展开探讨。
一、机器人操作控制系统的基本组成机器人操作控制系统一般由四部分组成,包括:1. 机器人控制器。
机器人控制器是机器人操作控制系统的核心,它可以控制机器人的各种动作。
根据机器人的类型和应用场景的不同,机器人控制器分为伺服控制器、PLC控制器、微控制器等多种类型。
2. 传感器系统。
机器人的传感器系统可以感知到周围的环境,并将感知到的信息传输给机器人控制器。
传感器系统主要包括视觉传感器、力传感器、位置传感器等。
3. 执行机构。
执行机构是机器人运动的驱动部件,它可以完成机器人的各种动作。
执行机构主要包括电机、液压系统、气压系统等。
4. 运动控制器。
运动控制器可以控制机器人的运动轨迹,使机器人能够按照预定的路线完成各种任务。
运动控制器的种类较多,常见的有伺服运动控制器、步进运动控制器等。
二、机器人操作控制系统的设计与实现机器人操作控制系统的设计与实现是一个复杂的过程,需要考虑多种因素。
下面我们就来看一看机器人操作控制系统的设计与实现过程中需要注意的问题。
1. 确定机器人的应用场景。
机器人操作控制系统的设计需要从应用场景入手,根据不同的任务需要确定机器人的类型、动作方式、传感器系统、执行机构等。
2. 选择适合的机器人控制器。
机器人控制器是机器人操作控制系统的核心,其性能直接关系到机器人的操作效率和稳定性。
在选择机器人控制器时需要考虑控制器的处理速度、接口类型、内存和存储容量等因素。
3. 设计合理的传感器系统。
传感器系统对机器人的操作非常重要,因此传感器的设计需要考虑到机器人的操作环境、物体形状、颜色等因素。
此外,为提高机器人的操作精度,还需要将传感器系统的误差控制在一定范围内。
机器人控制系统的设计和实现

机器人控制系统的设计和实现随着人工智能技术的快速发展,机器人在现代社会得到了广泛的应用,涵盖了制造业、医疗、教育、服务等领域。
机器人的能力越来越强大,但是机器人的控制系统的设计和实现也同样显得越来越关键。
机器人控制系统是指机器人的运动控制、感知处理、决策逻辑等方面的系统。
一个好的控制系统不仅能够提高机器人的运动精度和稳定性,还能使机器人更加灵活和自适应。
本文将从机器人控制系统的设计和实现两个方面展开讨论。
一、机器人控制系统的设计1.1 机器人运动控制机器人的运动控制是机器人控制系统设计一个核心的方面。
机器人运动控制主要包括位置控制、速度控制、力控制等。
在机器人的控制过程中,运动控制算法的优化是至关重要的。
目前,运动控制算法主要分为闭环控制算法和开环控制算法两种。
闭环控制可以通过传感器实时反馈机器人的状态,并根据期望输出和实际输出之间的差异进行调整。
闭环控制算法虽然能够提高机器人的运动精度和稳定性,但是过高的准确度和过高的干扰反馈增强程度可能造成系统震荡,而且这种算法算法比较复杂。
相比之下,开环控制算法较为简单,机器人的位置、速度、力等参数也较为容易量化。
但是,在开环控制中,没有实时反馈机器人的状态信息,因此无法进行及时调整。
为了解决这一问题,可以在机器人上加装更多传感器来获取更丰富的状态信息,并进行卡尔曼滤波等处理,使得机器人的运动更加精准和可控。
1.2 机器人感知处理机器人的感知处理是机器人控制系统中另一个核心的方面。
机器人感知处理主要包括:环境感知、目标检测和自主定位三个方面。
高质量的感知处理算法可以为机器人的行为和决策提供更加准确的背景信息。
机器人环境感知通常采用激光雷达、摄像头、红外线传感器等多种传感器来实时采集所处环境的数据。
环境感知的数据处理通常包括对数据的滤波、分割、分类等步骤。
对采集到的数据进行合理的处理可以减少假阳性和假阴性的发生,从而提高机器人的行为准确性。
机器人的目标检测主要是在所处环境中识别出需要处理的目标物体。
机器人控制系统设计与实现

机器人控制系统设计与实现一、引言随着科技和社会的不断发展,机器人作为一种新型产品,已经逐渐成为人们生活和工作中不可或缺的一部分。
机器人控制系统的设计和实现是机器人技术不断进步的关键之一。
从机器人控制系统的设计和实现方面来看,主要包括机器人硬件设计、控制算法设计以及系统集成等方面。
本文将介绍机器人控制系统设计与实现的基本原理和关键技术。
二、机器人硬件设计机器人硬件设计是机器人控制系统的重要组成部分。
机器人硬件主要包括机械结构、电气元器件、传感器、执行器等方面。
其中,机械结构的设计是机器人硬件设计的核心部分,其主要任务是实现机器人的运动和操作。
机器人的机械结构包括机器人的机械臂、关节、执行器、传动、连接等。
机器人机械结构的设计需要考虑到多种运动的方式和效率,以及刚度、质量、稳定性等方面的要求,从而实现机器人在各种不同运动环境下的优异性能。
电气元器件是机器人控制系统的实现基础,它包括机器人的电源、电路、控制器、驱动器等。
机器人控制器是机器人控制系统最关键的部分,它负责对机器人的电路、驱动器、传感器和执行器的控制和管理。
驱动器的设计和选型直接影响机器人的性能和运动状态。
机器人传感器是机器人控制系统中的核心元素之一,它可以提供机器人运动的反馈信息,从而保证机器人的运动行为的稳定和可靠性。
传感器的种类很多,包括触觉传感器、光电传感器、温度传感器、压力传感器等。
执行器是机器人控制系统中的关键元素之一,主要用于控制机器人各部分的运动和控制。
执行器的种类很多,包括直流电机、步进电机、伺服电机等。
这些执行器的选择和设计应该与机器人的运动特性和需求相匹配,从而保证机器人的运动响应快、准确、稳定。
三、控制算法设计控制算法设计是机器人控制系统设计和实现的核心部分,它可分为控制系统建模和算法设计两方面。
它们共同为实现机器人的各种运动和控制提供技术基础。
控制系统建模是机器人控制系统设计和实现的重要步骤之一,它通过对机器人系统的建模和分析,来解决机器人的控制问题。
基于PLC的机器人打磨控制系统设计

基于 PLC的机器人打磨控制系统设计摘要:机器人打磨技术越来越多的应用在工业领域,面对复杂的打磨工艺,机器人柔性加工变的越来越重要:针对这一问题设计开发了基于西门子PLC的和触摸屏的机器人打磨控制系统,阐述了控制系统的硬件组成、程序实现及一些关键的技术问题,生产实践证明此打磨控制系统运行稳定、操作灵活、满足工艺要求,有广阔的应用前景。
关键词:PLC;机器人打磨;自动化;软件设计前言:随着机器人应用技术的发展,机器人打磨技术逐渐应用在各行各业,在实际应用中往往是很多个不同结构的工件都需要在该打磨设备上进行打磨,而且打磨要求也越来越严格,这就需要有上料系统、变位机、工具库(打磨头更换系统)等不同的单个系统共同组成一个完整的控制系统,机器人在控制系统的作用下协调各个部分来完成工件的打磨。
为了解决这些需求,设计了一种机器人打磨控制系统,不但实现了机器人和各个部件之间的协调动作还可以与第三方设备通信,实现生产线的连续生产。
一、硬件组成系统主要部件:工业6轴机器人用于携带打磨工具对工件打磨;变位机作为工件的打磨平台,由3KW伺服电机控制,在打磨过程中可根据工艺需要进行正反方向360°旋转,且其台面上配有工装板用于工件的定位、夹紧;工具库为密闭工具库,配有气缸控制的开关门,用于存放打磨工具和打磨头,且可以防止所存放的配件免受打磨粉尘的污染;该打磨系统需要多个打磨头、1个电主轴、1个轴向气主轴和1个径向气主轴。
系统需要和机器人及第三方设备进行通信。
系统控制总体机构如图1所示。
系统采用西门子PLC-1200(DC/DC/DC)做控制器,根据系统的控制要求和控制规模,需要的输入和输出点数分别为96和40。
选择1个2*14Bit模拟量模块用来控制电主轴和伺服电机,且伺服电机的控制采用闭环,两个ET200SP作为分布式分别控制变位机和工具库。
操作台独立设置,使用西门子10寸触摸屏组态操作画面作为人机界面的操作。
工业机器人的控制系统设计与实现

工业机器人的控制系统设计与实现随着工业技术的不断发展,工业机器人已经成为了工业生产中不可或缺的一环。
在自动化生产的背景下,工业机器人的应用范围也在不断扩大。
工业机器人的控制系统设计与实现是关键的技术之一,下面就来简单探讨一下相关的知识。
一、工业机器人概述工业机器人是指利用数字化和微电子技术、机械设计制造技术、传感器和信息处理技术等多种技术手段,实现对机器人的智能控制、自主运行和执行某种操作的机器自动装置,代替人工完成一定的工作任务。
工业机器人可以大致分为联动式机器人和平行式机器人两种类型,其控制系统的设计与实现也是有所不同的。
二、工业机器人的控制系统组成及其功能工业机器人的控制系统主要由控制柜、机械手臂、电机、伺服控制器、传感器、编码器等组成。
其中,控制柜是整个控制系统的核心,包括控制器、电源、接口板、通信系统等。
控制器是机器人控制系统的主要部分,根据机器人类型和使用环境不同,控制器形式也不同,包括集成式控制器、模块化控制器和PC/IPC控制器等。
伺服控制器是机器人运动控制的核心,不同的伺服控制器在速度、精度、重复性、控制算法等方面都有不同的特点,根据不同的机器人类型和应用场景选择适合的伺服控制器可以提高机器人的开发效率和控制精度。
传感器和编码器则用来感知机器人在运动中的位置、姿态、速度等状态信息,并将这些信息反馈给控制器,根据反馈信息对机器人进行精确的控制。
三、工业机器人的控制系统设计与实现工业机器人的控制系统设计与实现需要综合考虑机器人类型、控制要求、应用场景等多种因素。
以下是常见的控制系统设计与实现流程:1、根据需求确定机器人类型和功能,选择适合的电机、传感器等组件。
2、根据机器人动力学模型和运动控制算法,设计伺服控制系统,并选择合适的伺服控制器。
3、设计机器人接口板和通信系统,并集成到控制柜中。
4、完成机器人编程和运动控制算法的开发,并上传到控制器中。
5、通过联调测试和调试,对机器人的控制系统进行功能测试和性能验证。
机器人控制系统的设计与实现

机器人控制系统的设计与实现一、概述机器人控制系统是一种集成化的系统,旨在以预设的程序对机器人进行控制和自动化操作。
该系统被广泛应用于制造、仓储、卫生保健等各个行业,极大地提高了生产效率和生产线的自动化程度。
本文将介绍机器人控制系统的设计和实现。
二、机器人控制系统的构成机器人控制系统由三个主要组件组成:机器人本身、运动控制单元和视觉处理单元。
1. 机器人本身机器人本身是机器人控制系统的核心。
它们可以根据设定的程序进行各种任务,如装配、拆卸或运输。
机器人通常由机械部分、电子部分、以及传感器系统组成。
2. 运动控制单元运动控制单元负责对机器人的动作执行进行管理。
它通过电子行程,操作簧片和各个运动部件,使机器人完成各种动作。
通常情况下,这个单元需要运用使用以太网和其他通讯协议,将运动控制器和其他设备连接起来。
3. 视觉处理单元视觉处理单元则负责让机器人识别物体。
在许多应用中,机器人需要能够自主地定位物体并随后进行操作。
这就需要在机器人上安装一个视觉处理单元。
通常情况下,视觉系统包括镜头、摄像头和图像处理软件等组件。
三、机器人控制系统的设计设计一个机器人控制系统时,需要严谨地考虑所有因素,并确保系统符合要求。
因此,必须考虑以下因素:1. 机器人设计机器人设计是机器人控制系统设计的核心。
机器人的机械和电气工程都应该能够充分满足系统设计的需求。
2. 通讯协议的设计通讯协议是机器人控制系统中的重要部分。
通讯协议直接影响着运动控制单元与视觉处理单元之间的数据交换。
因此,设计一个高效的通讯协议可以提升系统的效率和稳定性。
3. 控制算法的设计控制算法让机器人能够执行不同的任务。
因此,为确保机器人能够按照要求工作,需要一个完善的控制算法系统。
在设计控制算法时,应该考虑到机器人的动作精度、安全、生产效率等问题。
四、机器人控制系统的实现实现机器人控制系统需要高度的技术能力和经验。
通常,以下是实现机器人控制系统的步骤:1. 机器人设计与制造机器人的机械、电气和传感器系统在控制系统实现过程中起着关键作用。
毕业设计(论文)-产线控制系统机器人模拟打磨工位的控制系统设计与实现[管理资料]
![毕业设计(论文)-产线控制系统机器人模拟打磨工位的控制系统设计与实现[管理资料]](https://img.taocdn.com/s3/m/5fdc84be852458fb770b56fd.png)
本科毕业设计(论文)题目产线控制系统机器人模拟打磨工位的控制系统设计与实现-机器人与HMI部分学院电气工程与自动化学院年级2015 专业自动化班级ZB02151 学号30学生姓名校内导师职称正高校外导师职称论文提交日期2017-5-15常熟理工学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的本科毕业设计(论文),是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
本人学号(9位):本人签名:日期:常熟理工学院本科毕业设计(论文)使用授权说明本人完全了解常熟理工学院有关收集、保留和使用毕业设计(论文)的规定,即:本科生在校期间进行毕业设计(论文)工作的知识产权单位属常熟理工学院。
学校有权保留并向国家有关部门或机构送交论文的复印件和电子版,允许毕业设计(论文)被查阅和借阅;学校可以将毕业设计(论文)的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存、汇编毕业设计(论文),并且本人电子文档和纸质论文的内容相一致。
保密的毕业设计(论文)在解密后遵守此规定。
本人签名:日期:导师签名:日期:产线控制系统机器人模拟打磨工位的控制系统设计与实现摘要随着现代科技的不断发展以及劳动力成本不断上涨,越来越多的企业都在摸索如何实现“机器换人”,以此来提高生产效率和降低劳动生产成本。
经过长时间的磨合,工业机器人市场与产业逐渐发展起来,相信在不久的将来,机器人将渗透各个领域。
本课题就是利用机器人代替人工对工件进行重复性打磨,从而提高生产效率。
本课题以ABB的6自由度IRB-1410工业机器人实训系统作为研究对象,利用西门子s7-200PLC编程给机器人发送信号,再通过机器人示教编程来实现对工件的抓取、圆角打磨、表面打磨、放置四个动作完成该工站的任务。
工厂智能化生产中的机器人控制系统设计与实现

工厂智能化生产中的机器人控制系统设计与实现近年来,随着科技的不断进步和工业化水平的提升,智能制造技术在工厂生产中的应用已经成为了不可忽视的趋势。
智能化生产中的机器人控制系统设计与实现是智能制造的核心,其涉及到机器人的引入、机器人的编程、机器人的控制等多个方面,需要综合考虑工厂的生产需求、机器人的技术特点以及控制系统的设计原则等因素,才能够设计出高效、安全、稳定的机器人控制系统。
首先,机器人的引入是智能化生产中的重要环节。
在引入机器人之前,需要对工厂的生产环境进行分析和评估,确定机器人的应用领域和工作任务。
同时,需要选择适合的机器人类型和规格,例如,对于需要进行重复性操作的任务可以选择工业机器人,对于需要进行灵活操作的任务可以选择轻型机器人。
引入机器人还需要考虑机器人与人员的安全问题,例如,使用传感器和摄像头对机器人周围的环境进行监测,避免机器人与人员发生碰撞或造成其他安全隐患。
其次,机器人的编程是机器人控制系统设计与实现的重要环节。
机器人的编程可以分为离线编程和在线编程两种方式。
离线编程是在计算机上进行机器人程序的编写和调试,然后将程序上传到机器人进行执行;在线编程是在机器人控制台上进行程序的编写和调试。
无论是离线编程还是在线编程,都需要对机器人的动作、工具装置、传感器等进行编程。
在编程过程中,需要考虑机器人的运动轨迹规划、障碍物避障、姿态控制等问题,以保证机器人能够按照预定的路径和动作进行工作。
最后,机器人的控制是机器人控制系统设计与实现的核心环节。
机器人的控制可以由硬件和软件两个方面来实现。
在硬件方面,需要选择适当的传感器和执行器,并与机器人的控制系统进行连通。
在软件方面,需要设计机器人控制系统的软件架构和算法,例如,采用PID控制算法来实现机器人的位置控制,采用模糊控制算法来实现机器人的力控制。
此外,还需要考虑机器人控制系统的实时性和稳定性,以确保机器人能够在不同工作条件下按照预定的控制策略进行工作。
工厂智能化生产中的机器人控制系统设计与实现

工厂智能化生产中的机器人控制系统设计与实现随着工业技术的不断发展,智能化生产成为了现代化工厂中的重要趋势。
其中,机器人作为未来工厂的代表,扮演着重要的角色。
机器人带来了高效、精准、可持续的生产方式,解放了人力资源,提高了生产效率。
然而,机器人在工厂中的应用,需要一套完善的控制系统,来保证其稳定运行和高质量的生产。
本文就探讨一下,工厂智能化生产中的机器人控制系统设计与实现。
一、机器人控制系统的组成机器人控制系统主要由以下几个模块组成:1. 传感器模块:用来采集机器人周围的环境信息,包括温度、湿度、压力、位置、速度、角度、力等多种参数,为后续的控制提供准确的数据支撑。
2. 控制器模块:负责给机器人下达指令,如移动、抓取、放置等动作指令。
控制器还可以接受传感器模块采集的数据,根据实时情况进行调整控制。
3. 执行器模块:是机器人控制的最终实现者,由电动机、气动元件等控制机械臂、夹爪等执行机构动作,实现控制指令的转化。
二、机器人控制系统的设计要点1. 系统架构设计机器人控制系统应采用模块化设计,将传感器、控制器和执行器等模块分开设计,实现便于安装和维修。
同时,在控制器上采用分层控制结构,实现对机器人的多层控制,提高对机器人的控制精度和响应速度。
2. 实时性要求机器人控制系统的实时性要求非常高,需要在很短的时间内响应指令、采集传感数据、实时校准、计算位置并将控制信号反馈给执行器。
因此,系统中采用实时操作系统和实时控制算法,以及高速采集和处理控制信号的硬件。
3. 自动化控制机器人控制系统应支持自动化控制,并具有智能化和自学习的能力。
通过机器学习、深度学习、人工智能等技术,不断提升对机器人动作的理解和控制,从而实现更加复杂和高效的控制任务。
4. 安全性保障机器人在执行任务时经常处于高速和高精度状态下,很容易发生误差或其他意外。
因此,控制系统应具备安全保障措施,包括预判机器人动作和环境危险、降低意外发生的风险等。
自动化生产线上的机器人控制系统设计

自动化生产线上的机器人控制系统设计一、引言随着科技的不断发展和工业的转型,越来越多的企业开始使用自动化生产线,在自动化生产线中,机器人的应用越来越广泛。
而机器人控制系统设计则是机器人能够正常运转的关键。
二、机器人控制系统概述机器人控制系统是指对机器人的运动进行控制的系统,包括机械、电子、控制软件等多个方面。
机器人控制系统的设计主要分为三个部分:机器人结构设计、机器人控制器设计和编程软件设计。
机器人结构设计:机器人的结构设计需要根据不同的应用场景确定机器人的各个关节点和传感器,对机器人进行搭建。
机器人结构设计需要满足应用需求、运动性能、稳定性等要求。
机器人控制器设计:机器人控制器是对机器人进行控制和反馈的核心设备。
机器人控制器需要根据机器人的结构设计进行定制化的设计。
通常包括控制器软件、控制器硬件和通讯接口等等。
编程软件设计:编程软件是机器人运动的核心。
编程软件可以针对机器人结构进行编程,使得机器人可以完成任务。
编程软件包含语言、算法和动力学控制技术等方面。
三、自动化生产线上的机器人控制系统设计自动化生产线上的机器人控制系统设计需要考虑到现有生产线中机器人的安装和调试工作,以及机器人应该满足的功能需求。
安装调试工作:机器人的调试需要针对现有的生产线进行调试。
首先,需要进行机器人的结构设计,确定机器人的各个关节点和传感器。
然后,根据机器人的结构设计进行控制器的设计,包括控制器软件、控制器硬件和通讯接口等。
最后,进行编程软件的设计,使得机器人可以完成各种任务。
功能需求:自动化生产线上的机器人需要满足各种不同的功能需求。
首先,需要满足机器人在生产线上稳定运行的需求。
其次,需要满足机器人在生产线上完成指定任务的需求。
同时,机器人需要满足不同的应用场景下的应用需求,如工作环境、物料要求和任务复杂性等。
四、机器人的运动控制技术机器人的运动控制技术主要分为两种:位置控制和力控制。
位置控制:位置控制是机器人控制系统中的核心。
多功能机器人控制系统设计与实现
多功能机器人控制系统设计与实现随着科技的不断进步和人工智能的快速发展,机器人在各个领域的应用也越来越广泛。
多功能机器人作为一种高度智能化、多样化的机器人,能够完成多种任务,广泛应用于生产制造、军事领域、医疗护理等诸多领域。
而为了使多功能机器人能够灵活高效地完成各种任务,一个稳定可靠、功能齐全的机器人控制系统就显得尤为重要。
一、控制系统设计多功能机器人控制系统设计需要考虑到机器人的各个方面,涉及到机械结构、传感器、执行器、软件编程等多个方面。
1. 机械结构设计:多功能机器人的机械结构设计是控制系统设计的基础。
需要根据机器人的任务需求和工作环境,设计出合适的机械结构,包括机器人的机械臂、末端执行器、底盘等。
同时,还需要考虑机器人的运动学和动力学模型,以及机械结构的稳定性和承载能力。
2. 传感器设计:传感器是机器人获取外部信息的重要途径,也是机器人控制的关键。
多功能机器人的传感器设计需要根据任务需求选择合适的传感器,比如视觉传感器、力传感器、位置传感器等。
同时,需要考虑传感器的布局和连接方式,以及传感器数据的处理和融合。
3. 执行器设计:执行器是机器人完成任务的关键部件。
在多功能机器人控制系统设计中,需要选择合适的执行器,并设计相应的控制电路和驱动器。
同时,还需要考虑执行器的动作规划和控制算法,以确保机器人的动作准确、稳定。
4. 软件编程:多功能机器人的控制系统设计还需要进行软件编程。
这包括机器人各个部件的控制算法的编写和优化,以及机器人的任务规划和决策算法的设计。
同时,还需要开发相应的图形界面和通信接口,方便用户对机器人进行控制和监控。
二、控制系统实现多功能机器人控制系统的实现需要配合相关硬件设备和软件工具进行。
1. 硬件设备:为了实现多功能机器人的控制系统,需要选用适当的硬件设备,包括机械结构、传感器和执行器等。
这些硬件设备需要具备稳定性、精度和可靠性,并且能够满足机器人的任务需求。
2. 软件工具:实现多功能机器人的控制系统还需要使用相应的软件工具,比如机器人操作系统(ROS)、编程语言(C++、Python等)、仿真软件等。
自动化产线机器人操控系统设计

自动化产线机器人操控系统设计随着科技的不断进步,自动化产线机器人操控系统已经成为了生产制造行业中不可或缺的一部分。
它不仅可以提高生产效率,降低生产成本,而且还可以提高生产线的安全性和稳定性。
因此,设计一套高效稳定、灵活可靠的自动化产线机器人操控系统成为了制造业必须要解决的问题之一。
一、机器人系统的基本组成自动化产线机器人操控系统通常由控制器、传感器、执行器和操作界面四部分组成。
其中控制器是机器人系统的“大脑”,它能够实现对机器人动作的控制和监测。
当接收到命令后,控制器会计算出机器人需要的运动轨迹和速度,并将指令传送到机器人执行器上。
传感器可以对生产线上的环境和机器人状态进行监测和感知。
常用的传感器有视觉传感器、声音传感器、力传感器、温度传感器等。
它们能够为机器人提供需要的信息,实现更加精确的运动控制。
执行器是机器人系统的“手”和“腿”,它们能够执行控制器下达的指令,实现机器人的移动和操作。
常用的执行器有气动元件、电机、液压元件等。
操作界面是人与机器人进行交互的重要环节。
通过操作界面,人们可以向机器人下达指令,实时监测机器人的状态。
它可以是计算机、触摸屏、按钮等多种形式,根据实际情况进行配置。
二、机器人操控系统的设计机器人操控系统的设计需要考虑如下几个方面:1.系统的精度和稳定性机器人系统在生产线上的运动轨迹和速度需要达到一定的精度和稳定性,这需要选用合适的控制器和传感器。
同时,在制造机器人执行器的时候,也需要非常注意其中的精度。
2.系统的安全性机器人工作时需要考虑到工人的身体安全问题,在设计机器人执行器运动轨迹的时候,必须遵循相关的安全规范。
同时可以增加一些安全装置,比如添加安全光栅、机械限位器等设备。
3.系统的灵活性生产线的产品和生产方式会发生变化,机器人操控系统需要具备灵活的应对能力。
因此,在设计机器人控制器时需要考虑到其可编程性。
同时不同的执行器可以在不同的情况下进行切换。
4.系统的维护成本机器人操控系统在日常使用中需要进行维护,维护成本需要控制在一定的范围内。
一种工业机器人打磨工作站的控制系统设计
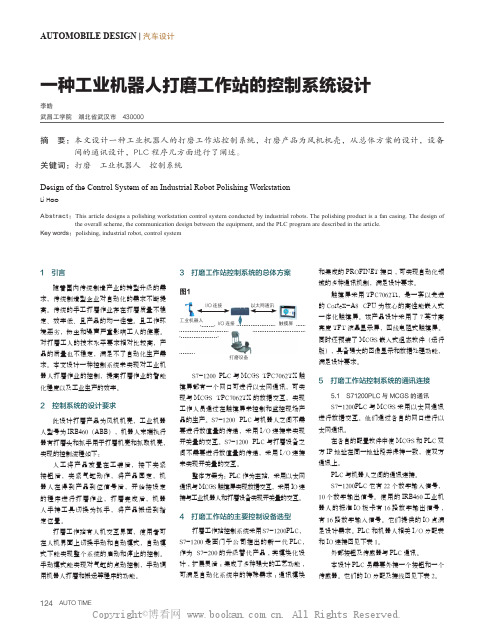
AUTOMOBILE DESIGN | 汽车设计一种工业机器人打磨工作站的控制系统设计李皓武昌工学院 湖北省武汉市 430000摘 要: 本文设计一种工业机器人的打磨工作站控制系统,打磨产品为风机机壳,从总体方案的设计,设备间的通讯设计,PLC程序几方面进行了阐述。
关键词:打磨 工业机器人 控制系统1 引言随着国内传统制造产业的转型升级的需求,传统制造型企业对自动化的需求不断提高。
传统的手工打磨作业存在打磨质量不稳定、效率低、且产品的均一性差。
且工作环境恶劣,粉尘和噪声严重影响工人的健康。
对打磨工人的技术水平要求相对比较高,产品的质量也不稳定,满足不了自动化生产需求。
本文设计一种控制系统来实现对工业机器人打磨作业的控制,提高打磨作业的智能化程度以及工业生产的效率。
2 控制系统的设计要求此设计打磨产品为风机机壳,工业机器人型号为IRB460(ABB),机器人末端执行器有打磨头和抓手用于打磨机壳和抓取机壳,实现的控制流程如下:人工将产品放置在工装后,按下夹紧按钮后,夹紧气缸动作,将产品固定,机器人在得到产品到位信号后,开始按设定的程序进行打磨作业,打磨完成后,机器人手持工具切换为抓手,将产品搬运到指定位置。
打磨工作站有人机交互界面,使用者可在人机界面上切换手动和自动模式,自动模式下能实现整个系统的启动和停止的控制。
手动模式能实现对气缸的点动控制,手动调用机器人打磨和搬运等程序的功能。
3 打磨工作站控制系统的总体方案图1I/O连接I/O连接以太网通讯触摸屏打磨设备工业机器人S7-1200 PLC与MCGS TPC7062TX触摸屏都有一个网口可进行以太网通讯,可实现与MCGS TPC7062TX的数据交互,实现工作人员通过在触摸屏来控制和监控现场产品的生产。
S7-1200 PLC与机器人之间不需要进行数值量的传递,采用I/O连接来实现开关量的交互。
S7-1200 PLC与打磨设备之间不需要进行数值量的传递,采用I/O连接来实现开关量的交互。
机器人控制系统的设计与仿真

机器人控制系统的设计与仿真随着机器人技术的不断发展,机器人在工业、军事、医疗、家庭等领域中得到了广泛的应用。
机器人控制系统是机器人工作的核心部分,它能够控制机器人高效地完成多样化的任务,提高生产效率,减少劳动强度。
本文将介绍机器人控制系统设计与仿真的基本原理和实现步骤。
一、机器人控制系统的基本原理机器人控制系统是由硬件电路和软件程序组成的,包括指令处理器、传感器、执行器、通信接口等。
机器人需要收集环境信息,通过控制系统中的处理器计算出相应的控制指令,再通过执行器转换成机器人所需的动作,完成任务。
机器人控制系统由三个部分组成:传感系统、决策系统和执行系统。
传感系统通过传感器对环境进行检测和获取信息;决策系统是控制系统的核心部分,它对传感器获取的信息进行处理,并生成控制指令;执行系统是控制系统的输出部分,通过执行器将指令转化成机器人的动作。
二、机器人控制系统的设计步骤1.需求分析在机器人控制系统设计过程中,需要进行需求分析,确定机器人控制系统所需要实现的功能,包括传感器、控制指令、执行器、通信接口等。
例如,对于家庭清洁机器人来说,所需传感器包括摄像头、超声波传感器,控制指令包括清洁、充电、自动避障等,执行器包括电机、驱动器等。
2.硬件设计与制作硬件设计包括电路原理图和PCB板的设计,制作包括PCB板的制作、元器件的安装等。
为了保证机器人的稳定性和可靠性,硬件设计需要遵循一定的标准,设计合理的电路结构,并选择合适的元器件。
3.软件设计与编程根据机器人的需求,设计相应的程序,并通过编程实现控制系统的各种功能。
软件程序需要和硬件电路相结合,完成机器人控制系统的整体设计。
4.系统集成与调试将硬件电路和软件程序组合在一起,进行系统集成和调试。
系统集成时,需要按照一定的流程进行测试和验证,确保机器人控制系统能够正常运行。
调试过程中,需要对系统进行各种测试,包括传感器测试、控制指令测试、执行器测试等。
三、机器人控制系统的仿真与优化在机器人控制系统设计和实现之前,进行仿真测试是十分必要的,通过仿真测试可以预测机器人的运动和控制系统的性能,并进行优化。
机器人工业化生产线全流程自动化控制系统的设计

机器人工业化生产线全流程自动化控制系统的设计随着科技的不断发展和进步,机器人在工业生产中扮演着越来越重要的角色。
机器人的运用能够提高生产效率、降低生产成本、提高产品质量,并且可以处理一些危险或重复性较高的工作。
为了充分发挥机器人的优点,机器人工业化生产线的全流程需要进行自动化控制系统的设计。
一.系统需求分析在设计机器人工业化生产线全流程的自动化控制系统之前,需要进行系统需求分析,明确系统的目标和功能需求。
主要包括以下几个方面:1.生产线布局分析:根据生产线的特点和需求,对生产线的布局进行分析和规划,确定生产线上各个工位的位置和机器人的布置方式。
2.生产能力分析:根据产品的生产需求,对整个生产线的产能进行估算和分析,确定生产线的产能要求。
3.自动化控制需求分析:根据生产线的特点和生产需求,对自动化控制系统的需求进行分析,确定系统所需的功能和性能要求。
二.控制系统设计在系统需求分析的基础上,进行机器人工业化生产线全流程自动化控制系统的设计。
主要包括以下几个方面:1.控制架构设计:根据生产线的特点和控制需求,设计系统的控制架构,包括控制层级和通信方式等。
2.传感器选择和布置:根据生产线上的工作要求,选择和布置适当的传感器,用于收集生产线上的各个环节的信息,如温度、压力、位置等。
3.机器人选择和编程:根据生产线的需求,选择适当的机器人,并进行机器人的编程,使其能够完成生产线上的各种任务。
4.控制算法设计:根据生产线的特点和控制需求,设计相应的控制算法,用于控制机器人的运动和生产线的工作流程。
5.故障诊断和维护设计:设计相应的故障诊断和维护系统,能够及时检测和诊断生产线上的故障,并提供相应的维护方案。
三.系统实施与测试在控制系统设计完成后,需要进行系统的实施和测试,确保系统能够正常运行。
主要包括以下几个步骤:1.硬件安装和调试:根据设计要求,对控制系统的硬件进行安装和调试,包括传感器、机器人和控制设备等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业设计(论文)题目产线控制系统机器人模拟打磨工位的控制系统设计与实现-机器人与HMI部分学院电气工程与自动化学院年级2015 专业自动化班级ZB02151 学号30学生姓名校内导师职称正高校外导师职称论文提交日期2017-5-15常熟理工学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的本科毕业设计(论文),是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
本人学号(9位):本人签名:日期:常熟理工学院本科毕业设计(论文)使用授权说明本人完全了解常熟理工学院有关收集、保留和使用毕业设计(论文)的规定,即:本科生在校期间进行毕业设计(论文)工作的知识产权单位属常熟理工学院。
学校有权保留并向国家有关部门或机构送交论文的复印件和电子版,允许毕业设计(论文)被查阅和借阅;学校可以将毕业设计(论文)的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存、汇编毕业设计(论文),并且本人电子文档和纸质论文的内容相一致。
保密的毕业设计(论文)在解密后遵守此规定。
本人签名:日期:导师签名:日期:产线控制系统机器人模拟打磨工位的控制系统设计与实现摘要随着现代科技的不断发展以及劳动力成本不断上涨,越来越多的企业都在摸索如何实现“机器换人”,以此来提高生产效率和降低劳动生产成本。
经过长时间的磨合,工业机器人市场与产业逐渐发展起来,相信在不久的将来,机器人将渗透各个领域。
本课题就是利用机器人代替人工对工件进行重复性打磨,从而提高生产效率。
本课题以ABB的6自由度IRB-1410工业机器人实训系统作为研究对象,利用西门子s7-200PLC编程给机器人发送信号,再通过机器人示教编程来实现对工件的抓取、圆角打磨、表面打磨、放置四个动作完成该工站的任务。
同时也运用西门子人机界面winccflexible smart v3对机器人动作进行监控,画面包括主界面、电机运行画面、报警画面,最后通过PLC和上位机进行通讯连接,从而实现对该工位的实时监控。
当然,在做这套系统之前也要事先通过ABB专门的仿真软件robstudio进行模拟仿真画面,然后按照仿真中的画面进行实际的安装。
关键词:工业机器人 PLC wincc监控 robstudio仿真Design and Realization of Control System for Simulating GrindingStation of Production Line Control SystemAbstractWith the continuous development of modern technology and rising labor costs, more and more enterprises are groping how to achieve "machine substitutions", in order to improve production efficiency and reduce labor costs. After a long run, the industrial robot market and industry gradually developed, I believe in the near future, the robot will penetrate all areas. This topic is the use of robots instead of artificial parts of the repetitive polished, thereby enhancing production efficiencyThis paper takes ABB's 6-DOF IRB-1410 industrial robot training system as the research object, uses Siemens s7-200PLC programming to send signals to the robot, and then through the robot teaching programming to achieve the workpiece crawling, fillet grinding, surface Polish, put four actions to complete the task of the station. But also the use of Siemens man-machine interface winccflexible smart v3 to monitor the robot, the screen, including the main interface, the motor running screen, alarm screen, and finally through the PLC and the host computer for communication connection, in order to achieve real-time monitoring of the station. Of course, before doing this system must also be in advance through ABB's special simulation software robstudio simulation screen, and then follow the simulation of the screen for the actual installation.Keywords: IndustrialRobot;PLC;Wincc;Monitor;Robstudio Simulation目录1.绪论 (1)1.1 课题的目的和意义 (1)1.2 课题研究的现状与趋势 (1)1.2.1国内外机器人发展状况 (1)1.2.2未来的趋势 (2)1.3 课题研究的主要内容 (3)2.打磨去毛刺工站的系统设计方案 (4)2.1 打磨去毛刺工站的工作流程 (4)2.2 控制系统的总体方案 (4)2.3 本章小结 (4)3.打磨去毛刺工站系统的硬件电路设计 (5)3.1 PLC的选型及外部接线图 (5)3.1.1 PLC选型 (5)3.1.2 PLC的I/O分配表 (5)3.1.3 PLC的外部接线图 (6)3.2 通讯模块EMZ77 (7)3.2.1 EM277模块地址设置 (8)3.2.2 EM277模块的电路接线图 (8)3.3 传感器的电路设计 (8)3.3.1传感器的选型 (8)3.3.2该传感器的工作原理 (9)3.3.3 中转台上的传感器电路设计 (9)3.3.4 抓手上的传感器及气缸电路设计 (10)3.4 打磨机砂轮机传送带的电路设计 (11)3.5本章小结 (11)4.打磨去毛刺工站系统的软件设计 (12)4.1 S7-200的通讯连接 (12)4.1.1 通信方式选择 (12)4.1.2 通信参数设置 (12)4.2 PLC控制的流程图设计 (14)4.3 主程序介绍 (14)4.4本章小结 (18)5.上位机监控画面设计 (19)5.1 组态画面设计 (19)5.1.1 项目的创建 (19)5.1.2 变量连接 (20)5.1.3 建立变量 (20)5.1.4 模板画面设计 (20)5.1.5 主画面设计 (21)5.1.6 机器人信号状态画面设计 (22)5.1.7 报警画面 (23)5.2 PLC与触摸屏的通信连接 (24)5.3本章小结 (24)6.机器人仿真与示教编程 (25)6.1 创建工具 (25)6.1.1 设定本地原点 (25)6.1.2 创建工具 (26)6.2 创建仿真画面 (26)6.2.1 建立机器人系统 (26)6.2.2 创建画面 (27)6.3 用smart组件创建动态夹具Gripper (27)6.3.1 建立smart组件 (27)6.3.2 创建属性与连结 (28)6.3.3 创建信号与连接 (28)6.3.4 工作站逻辑I/O信号设定 (30)6.4 示教编程及解析 (30)6.4.1 示教器常用指令 (30)6.4.2 程序解析 (32)6.5本章小结 (32)7.系统调试运行分析 (35)8.结语 (35)参考文献 (36)致谢 (37)附录 (38)1.绪论1.1 课题的目的和意义首先,最近几年里我国机器人这个行业可谓是发展的非常快,不管是服务型机器人还是工业机器人,都将成为未来发展的大趋势,加上目前无人驾驶汽车的快速研发,相信在不久的将来汽车行业也将会有一个颠覆性的变化。
然而生产汽车最终还是脱离不了工业机器人,无论是焊接、打磨、还是喷涂、装配等等,机器人产线都发挥着重大作用。
不仅是汽车行业,还有手机等大量自动化行业都离不开工业机器人。
再者德国工业4.0以及中国制造2025和十三五规划的相继出台,政府和资本的支持给机器人产业健康、稳定的发展带来了有利的条件。
目前,工业机器人已经在各种自动化生产线上被广泛地应用,在机器人种类中有着举足轻重的作用 ,它由四部分构成,分别是操作机、控制器、伺服驱动系统和检测传感装置。
工业机器人包括模仿人类关节结构的关节型工业型机器人,直角坐标型机器人,圆柱坐标型机器人、球坐标型机器人、喷漆机器人、焊接机器人等。
据专家预测,工业机器人的研究工作已向仿人化特种化智能化发展我们着手设计的门架机器人属特种化机器人,所以工业机器人的研究具有重大的意义。
由于我国工业生产力发展比较快,自动化程度迅速提高,机器人产业已经开始实现了对工件的装卸、转向、输送、装配等作业的自动化,并减轻工人的劳动强度,已愈来愈引起人们的重视。
而研究该课题的意义就在于运用机器人生产线打磨产品,不仅可以提高生产率,降低成本,还能让人远离打磨机带来的噪音伤害,真正能够实现以人为本,最终达到“机器换人”这一趋势。
1.2 课题研究的现状与趋势1.2.1国内外机器人发展状况在我国,工业机器人的真正使用到现在已经接近20多年了,已经基本实现了试验、引进到自主开发的转变,促进了我国制造业、勘探业等行业的发展。
随着我国门户的逐渐开放,国内的工业机器人产业将面对越来越大的竞争与冲击,因此,掌握国内工业机器人市场的实际情况,把握我国工业机器人研究的相关进展,显得十分重要。