五轴说明书(编程部分)
五轴编程UG教程
1刀轴远离直线(zhíxiàn)-案例1
分层切削(qiēxi āo)
第九页, 共61页。
词语: 如果 拼音: rúguǒ
1刀轴远离(yuǎn l í ) 直线-案例1 解释: 连词。表示假设。《前汉书平话》卷上: “如果不利,截旗营前,以定胜败验之。”《儒林外史》第十六回: “如果文
象
利用网格曲面作为 驱动面能够获得光
顺的刀路
构建网格曲面
面的质量 决定刀轨 的质量
第十九页, 共61页。
词语:指定 拼音:zhǐdìng 解释:确定;认定。唐刘肃《大唐新语·公直》:“銛谬膺驳正,敢废司存,请傍移礼官,以求指定。”宋司马光《起请科场札 子》:“伏乞以臣所奏,及礼部等官所议,榜国子监门,及编下诸州,有州学处榜州学门,令举人限一月内投状,指定何法为善,
旋转刀轨, 获得(huòdé)各个槽的加工程序, 两个刀轨要接起, 否则会有残料
第二十四页, 共61页。
2刀轴插补-案例(àn l ì ) 3
第二十五页, 共61页。
3刀轴侧刃驱动(qū dònɡ)1
部件几何引导刀尖运 动, 驱动面引导刀具
侧刃运动
部件(bù jiàn)选 择底面
驱动(qū dònɡ)面 为周边
第一回:“问其所 以,都是黄河沿上的州县,被河水决了,田庐房舍,尽行漂没。”可与形容词或动词组成名词性词组,仍表示 原因、情由。《庄子·天运》:“彼知矉美,而不知矉之所以美。”《史记·卫康叔世家》:“必求殷之贤人君子长者,问其所以 兴,所以亡,而务爱民。”用以,用来。《庄子·天地》:“是三者,非所以养德也。”《史记·孟尝君列传》:“若急,终无以 偿,上则为君好利不爱士民,下则有离上抵负之名,非所以厉士民彰君声也。”宋苏洵《几策·审势》:“故威与惠者,所以裁节 天下强弱之势也。”连词。表示因果关 系。用在下半句,由因及果。《荀子·哀公》:“君不此问,而问舜冠,所以不对。”北
《五轴编程UG教程》课件

THANKS
汇报人:PPT
UG软件的安装与配置
UG软件的安装步 骤
UG软件的配置参 数
UG软件与其他软 件的兼容性
UG软件的使用技 巧
Part Four
五轴编程基础知识
五轴机床的基本结构
五轴机床的定义和特点 五轴机床的分类和组成 五轴机床的控制系统和编程软件 五轴机床的应用领域和优势
五轴机床的坐标系和运动关系
五轴机床的坐标系 五轴机床的运动关系 五轴机床的编程技巧 五轴机床的应用领域
加工复杂零件:五 轴编程能够加工复 杂零件,满足高精 度、高效率的加工 需求。
提升产品质量:五 轴编程能够减少加 工误差,提高产品 质量和稳定性。
适应市场需求:五 轴编程能够适应市 场需求,满足不同 客户的需求,提高 企业的竞争力。
Part Three
UG软件介绍
UG软件的基本功能
建模功能:支持多种建模方式,包括实体建模、曲面建模等 工程图功能:能够生成符合工程要求的图纸,包括零件图、装配图等 运动仿真功能:可以对机构进行运动仿真,分析机构的运动性能 数控加工功能:支持多种数控加工方式,包括铣削、车削、钻孔等 模具设计功能:支持模具设计,包括分型面设计、型腔设计等
实际加工过 程演示:通 过视频或图 片展示实际 加工过程, 包括机床操 作、刀具选 择等
加工结果评 估:对加工 结果进行评 估,包括尺 寸精度、表 面粗糙度等 方面
总结与展望: 总结叶轮加 工的难点和 解决方案, 并展望未来 五轴编程技 术的发展趋 势
案例二:加工螺旋桨
螺旋桨简介:介 绍螺旋桨的结构、 功能和制造要求。
实际应用案例:介绍UG软件在后处理与工艺规划方面的实际应用案例, 包括复杂零件的加工、多轴联动加工等。
五轴编程简介

视频
学而不思则罔--思而不学则殆
三轴与五轴加工的比较
学而不思则罔--思而不学则殆
多轴加工的目的
学而不思则罔--思而不学则殆
多轴加工的目的
学而不思则罔--思而不学则殆
多轴加工的目的
S=1000VC/ D VC=S* D/1000
D=0 VC=0
学而不思则罔--思而不学则殆
多轴加工的目的
学而不思则罔--思而不学则殆
多轴加工的目的
学而不思则罔--思而不学则殆
多轴加工的目的
学而不思则罔--思而不学则殆
多轴加工的目的
学而不思则罔--思而不学则殆
多轴加工常见机床类型
学而不思则罔--思而不学则殆
四轴-旋转工作台A轴,旋转主轴
旋转工作台A轴特点:机床刚 性好,但受旋转台的限制,不
适合大型零件。
旋转主轴特点:旋转灵活,适合各 种形状大小零件,但是机床刚性差,
不能重切削。
视频
视频
学而不思则罔--思而不学则殆
五轴双旋转工作台
特点:机床刚性好,但受旋转台的限制,不适合大型零
五轴双摆头
特点:旋转灵活,适合各种形状大小零件,但是机床刚性差,不能重切 削。由于双摆头机床主要是针对大型零件而设计的,所以以龙门式为主
视频
学而不思则罔--思而不学则殆
五轴摆台+摆头
特点:主轴旋转灵活,C轴不限制零件旋转,但A轴同样会限制零件大小
JDPANNT5.5五轴模块使用说明书要点

JDPaint V5.5 多轴加工方法(版本0.01)北京精雕科技有限公司2007.08前言本文档从多轴基本知识、控制系统及控制软件(EN3D)设定及加工、JDPAINT5.5五轴编程模块等方面介绍一些常用的多轴加工技术,用以帮助使用者了解多轴加工操作和设定,减少多轴路径编程时间,改善多轴刀具路径质量。
本文档主要以实例的方式来介绍多轴编程加工,在阅读时可以结合实例来学习,可以达到更好的效果。
不同的人有不同的思路,因此请不要把本文档中介绍的一些技术视为多轴加工的基本原理,多轴加工技术内容相当丰富,不是薄薄一本手册可以覆盖的。
同时需要进行大量的实际加工,从中体会多轴加工的不同之处,灵活运用我们现有的编程功能,才能对五轴加工有一定的领悟。
阅读文档的读者应具备以下几方面的背景知识:1、对三轴精雕机有一定了解;2、具备一些模型的三轴加工经验;3、具备一些三维建模(或者曲面造型)经验者更佳。
第一章绪论在过去模具加工很少使用五轴加工,问题在于多轴机床的价格昂贵及人员培训与技术上的困难,大家皆敬而远之。
近年来因模具交期紧迫及价格压缩,五轴机床标准化产量,价格逐年下降,使五轴加工渐渐的受到模具业重视,多轴机床将是继高速加工机后另一个有效的加工工具。
1.1 五轴加工与三轴加工比较五轴加工与三轴加工比较,有以下几方面的优点:1) 减少工件非加工时间,可以提高加工效率五轴加工的一个主要优点是仅需经过一次装夹即可完成复杂形状零件的加工。
和多次装夹相比,它可极大地提高加工和生产能力,显著缩短产品加工周期及加工成本,并且提高了加工精度。
2) 刀具可以摆到更好的位置来加工曲面五轴加工完成一些三轴加工无法完成的加工,比如有负角的曲面零件加工,刀具可以摆到更好的位置来加工曲面,如图1-1所示。
图1-1 刀具可以摆到更好的位置来加工曲面图1-2 缩短加工时间, 改善表面加工质量3) 可以缩短曲面加工时间,改善曲面表面的加工质量五轴加工可通过将刀具倾斜一定角度,例如用铣刀侧刃进行铣削等,缩短加工时间;另外路径间距相同的情况下,用五轴加工工件表面的残留量要比三轴加工小得多,有利于改善加工曲面的表面光洁度,如图1-2所示。
五轴联动加工中心操作与基础编程 第五章 多轴数控加工技术

Q2:P1为(28.284,-28.284,-50) P2为(28.284,28.284,-50) P3为(28.284,0,-25)
五轴定向加工的编程
2.1、前侧表面特性坐标系构建关系 (G68.2)
P1为(0,-28.284,-25)
(a)原点平移
(b)进动角0°变换 (c)盘转角90°(完成)
4
攻螺纹
M4丝锥
500
-8
工序号
进给速度F (mm/min)
400 500 150 350
五轴定向加工的编程
1、各表面特性坐标系构建关系 (G68.1Qn预置)
Q1:P1为(0,-28.284,-25) P2为(10,-28.284,-25) P3为(5,-28.284,-20)
Q3:P1为(28.284,28.284,-50) P2为(-28.284,28.284,-50) P3为(0,28.284,-25)
阶梯孔
Ф17钻头、内孔车 刀
三爪卡盘
托盘 铝 LY12
设备 锯床 数控车床
3
调头,车外圆Ф80、 内孔Ф45
外圆车刀 内孔车刀
三爪卡盘
数控车床
箱体零件五轴定向加工的工艺设计
xx厂
机械加工 工艺过程卡
产品型号 产品名称
工序
工序内容
工序草图
零(部)件图号 零(部)件名称
材料名称
材料牌号
编制
刀具/工具
装夹方法
工序名称 侧面槽孔加工
材料名称
材料牌号
铝
LY12
机床名称
机床型号
双摆台五轴
HZ-5xis
夹具名称
夹具编号
拉杆螺钉
工步
ug五轴编程教程

ug五轴编程教程五轴编程是机器人技术中非常重要的一部分,它允许机器人在三个平面上进行运动,并且可以通过旋转来改变工具的方向。
在本教程中,我们将学习如何编写五轴编程来控制机器人的动作。
1. 建立工作坐标系在编程之前,我们需要先建立一个工作坐标系。
这个坐标系可以是机器人手臂能够操作的空间范围。
通常情况下,这个坐标系由机器人的基座、手臂和工具构成。
我们需要确定坐标系的原点,以及三个平面的方向。
2. 设定起始位置机器人需要一个起始位置来开始工作。
这个位置可以根据实际需求来设定,比如机器人手臂的位置、工具的方向等。
起始位置一般由坐标值表示,在编程中使用坐标值来设定起始位置。
3. 确定目标位置在编程中,我们通常需要指定一个目标位置,让机器人移动到这个位置。
目标位置可以是一个具体的坐标值,也可以是一个相对于起始位置的偏移量。
根据实际需求来确定目标位置。
4. 编写运动指令一旦我们确定了起始位置和目标位置,我们就可以开始编写运动指令。
这些指令告诉机器人应该如何移动,以及移动的速度和加速度。
编程语言中通常提供了一些指令来实现这些功能,比如直线插补、圆弧插补等。
5. 调试和优化编写完运动指令后,我们需要对程序进行调试和优化。
这包括检查程序中的错误,修改参数以获得更好的运动效果。
通常情况下,我们可以通过机器人模拟器来模拟程序的运行情况,并进行调试和优化。
总结:五轴编程是一项复杂而重要的任务,它允许机器人在三个平面上进行运动,并进行工具方向的调整。
通过建立工作坐标系、设定起始位置、确定目标位置、编写运动指令以及进行调试和优化,我们可以实现机器人的精确控制。
五轴联动加工中心操作与基础编程 第七章 叶轮零件五轴加工
多轴数控加工技术
7.2叶轮零件五轴加工刀路设计
训练:对含叶轮特征件设计综合五轴加工刀路。训练档:叶轮加工.MCX 训练方法:多种五轴综合加工刀路定义的讲解和现场练习。(模型已建)
五轴加工的CAM刀路设计
一、口部锥面的平行到曲线五轴加工刀路定义。
要点1:选择锥底 曲面边线为边界曲 线,选择锥面为加 工面
关闭叶轮基体所在图层,然后按图所示,将封闭的叶型线框绕回转轴心线旋 转360º生成叶片柱筒实体
按图示构建截面外形轮廓,再绕叶轮轴心旋转切割已构建的叶片柱筒实体, 即可得到单个叶片的雏形。切割用线框轮廓主要用于获得叶轮上部及侧面的 叶型边界,辅助线框以能将柱筒残料全部切割掉而绘制
按图示在前视面构建挤出切割用线框,对超出基体范围的另一侧和底部实施 双向贯穿切割,仅保留叶片有效部分
槽底曲面
刀轴侧倾0゜ 底刃切削
刀轴侧倾90゜ 侧刃切削
第七章 多轴数控加工技术
7.2叶轮零件图样的几何建模
先学习叶轮模型的构建,再处理其它结构特征
按图示在前视面绘制一封闭线框后,以绕旋转轴线旋转360º构建实体的方 法即可得到叶轮基体的3D实体模型
如图所示,先找到Ф150直径柱切面与基体曲面的交线,以正前方与-Y轴交 点处正切面为构图面(前视面Z=75),按b图所示在新层中绘制叶截面的中 线、叶背和叶面型线,同时以100的距离在左上绘出中线的平行线,作为叶 型建模用的回转轴心线
七、叶轮槽槽底曲面五轴加工刀路定义-刀轴控制。
五轴加工的CAM刀路设计
七、叶轮槽槽底曲面五轴加工刀路定义-刀轴控制路径线的构建。
五轴加工的CAM刀路设计
八、叶轮槽五轴加工刀路定义-粗切分层及多槽变换。
两曲面之间
两曲线之间
JDPANNT5.5五轴模块使用说明书

JDPaint V5.5 多轴加工方法(版本0.01)北京精雕科技有限公司2007.08前言本文档从多轴基本知识、控制系统及控制软件(EN3D)设定及加工、JDPAINT5.5五轴编程模块等方面介绍一些常用的多轴加工技术,用以帮助使用者了解多轴加工操作和设定,减少多轴路径编程时间,改善多轴刀具路径质量。
本文档主要以实例的方式来介绍多轴编程加工,在阅读时可以结合实例来学习,可以达到更好的效果。
不同的人有不同的思路,因此请不要把本文档中介绍的一些技术视为多轴加工的基本原理,多轴加工技术内容相当丰富,不是薄薄一本手册可以覆盖的。
同时需要进行大量的实际加工,从中体会多轴加工的不同之处,灵活运用我们现有的编程功能,才能对五轴加工有一定的领悟。
阅读文档的读者应具备以下几方面的背景知识:1、对三轴精雕机有一定了解;2、具备一些模型的三轴加工经验;3、具备一些三维建模(或者曲面造型)经验者更佳。
第一章绪论在过去模具加工很少使用五轴加工,问题在于多轴机床的价格昂贵及人员培训与技术上的困难,大家皆敬而远之。
近年来因模具交期紧迫及价格压缩,五轴机床标准化产量,价格逐年下降,使五轴加工渐渐的受到模具业重视,多轴机床将是继高速加工机后另一个有效的加工工具。
1.1 五轴加工与三轴加工比较五轴加工与三轴加工比较,有以下几方面的优点:1) 减少工件非加工时间,可以提高加工效率五轴加工的一个主要优点是仅需经过一次装夹即可完成复杂形状零件的加工。
和多次装夹相比,它可极大地提高加工和生产能力,显著缩短产品加工周期及加工成本,并且提高了加工精度。
2) 刀具可以摆到更好的位置来加工曲面五轴加工完成一些三轴加工无法完成的加工,比如有负角的曲面零件加工,刀具可以摆到更好的位置来加工曲面,如图1-1所示。
图1-1 刀具可以摆到更好的位置来加工曲面图1-2 缩短加工时间, 改善表面加工质量3) 可以缩短曲面加工时间,改善曲面表面的加工质量五轴加工可通过将刀具倾斜一定角度,例如用铣刀侧刃进行铣削等,缩短加工时间;另外路径间距相同的情况下,用五轴加工工件表面的残留量要比三轴加工小得多,有利于改善加工曲面的表面光洁度,如图1-2所示。
德马吉五轴加工中心DMU60操作与编程培训手册

机械技术学院德马吉五轴加工中心DMU60操作与编程培训手册魏昌洲 李晓会 孙欢 汤维政 编无锡职业技术学院数控技术系2012年6月目录目录 (I)第一章机床简介 (1)1.1 机床特点 (2)1.2 DMU 60 mono BLOCK 技术数据和特性 (3)1.3 数控系统 (3)第二章运行方式 (4)2.1 屏幕画面 (4)2.1.1 屏幕画面布局 (4)2.1.2 屏幕画面上的键说明 (5)2.2 机床操作区 (6)2.2.1 机床操作区布局 (6)2.2.2 操作区键详细说明 (7)2.3 刀具表 (11)2.3.1 标准刀具数据 (12)2.3.2 自动测量刀具所需的刀具数据 (14)2.3.3 自动计算速度/进给速率所需的刀具数据 (14)2.3.4 用于开关式3D测量探针系统的刀具参数 (15)第三章机床操作 (16)3.1 开关机 (16)3.1.1 开机 (16)3.1.2 关机 (17)3.2基本操作 (18)3.2.1 手动操作 (18)3.2.2 电子手轮操作 (18)3.2.3 增量方式点动 (20)3.3建立刀具表和刀位表 (20)3.3.1 建立刀具表 (20)3.3.2 建立刀位表 (21)3.4 程序管理 (22)3.4.1 文件管理 (22)3.4.2 文件命名 (22)3.4.3 新建目录 (23)3.4.4 文件操作 (25)3.5 装卸刀具 (28)3.5.1 从刀库中装刀与拆刀 (28)3.5.2 从主轴中装刀与拆刀 (30)3.6 对刀 (30)3.6.1 用标准刀对刀长 (30)3.6.2 对刀(试切法) (33)第四章加工编程 (38)4.1 创建与编写程序 (38)4.1.1 定义毛坯形状-BLK FORM (39)4.1.2 创建新零件程序 (40)4.2 输入刀具相关数据 (40)4.2.1 进给速率F (40)4.2.2 主轴转速S (41)4.3 轮廓加工编程 (44)4.3.1 路径功能 (44)4.3.2 工件加工的刀具运动编程 (45)4.3.3 接近与离开轮廓的路径类型 (48)4.4 编程举例 (51)4.5 编程-循环 (54)4.5.1 用软键定义循环 (54)4.5.2 用GOTO 功能定义循环 (54)4.5.3 调用循环 (55)4.5.4 循环举例:钻孔循环 (55)4.6 测试运行和程序运行 (56)4.6.1 测试运行 (56)4.6.2 程序运行 (56)参考文献 (57)第一章 机床简介德马吉五轴万能加工中心DMU60是同类级别中最高效的5轴加工中心,灵活性最佳,DMU mono BLOCK® 机床与身俱来的高水准:标配5轴或模块式设计,可选配转速在10000rpm~42000rpm 范围之间的针对特定机床的主轴,用作 B 轴的快速动态数控铣头具有很大的摆动范围,负摆角最大达30°,还有快速数控回转工作台,适用于日常生产的5面/5轴加工。
五轴说明书(编程部分)

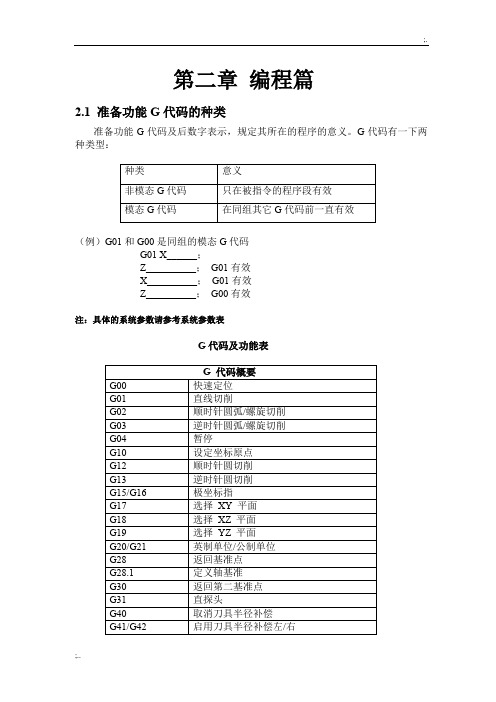
第二章编程篇2.1 准备功能G代码的种类准备功能G代码及后数字表示,规定其所在的程序的意义。
G代码有一下两种类型:(例)G01和G00是同组的模态G代码G01 X______;Z__________;G01有效X__________;G01有效Z__________;G00有效注:具体的系统参数请参考系统参数表G代码及功能表U、V、W分别和A、B、C 同义,同时使用A 和U 或B 和V 等会产生错误(也就是一行中用了两次A)。
在U、V、W 代码的描述中没有指定它们在同一程序行使用的次数,但A、B、C 代码的描述决定了他们只能使用一次。
2.1.1快速直线移动- G00(1)对于快速直线移动,程序G00 X__ Y__ Z__ A__ C__ 中的所有功能字,除了至少选用其中的一个外其它都为可选,如果当前移动模式为G00那么G00也是可选的,刀具可以以协调线性移动的方式以最大进给到达目的点,执行G00命令不会有切削动作发生。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
执行G16 时的当前点坐标就是极坐标原点。
如果在程序中省略了所有的轴功能字将会产生错误。
如果启用了刀具半径补偿,刀具的移动将与上面所描述的不同(见刀具补偿)。
如果程序在同一行有G53 命令,刀具的移动也同与上述不同(见绝对坐标系)。
2.1.2 以进给直线切削– G01(1)对于以进给直线切削来说,程序G01 X__ Y__ Z__ A__ C__中的所有功能字,除了必须至少使用的之外其它的轴功能字都为可选。
如果当前移动模式为G01,那么G01也是可选的,刀具将以协调线形移动的方式以当前进给移动到目的地。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
数控五轴xza方向的圆弧编程
数控五轴xza方向的圆弧编程摘要:1.数控五轴xza 方向的圆弧编程概述2.圆弧编程的基本原理3.圆弧编程的参数设定4.圆弧编程的实例演示5.圆弧编程的注意事项正文:一、数控五轴xza 方向的圆弧编程概述数控五轴xza 方向的圆弧编程是一种在五轴数控机床上实现圆弧运动的编程方法。
它能够实现x、y、z 三个线性轴和a、c 两个旋转轴的协同运动,从而完成复杂的空间曲线加工。
这种编程方法在航空航天、汽车制造等高精度制造领域有着广泛的应用。
二、圆弧编程的基本原理圆弧编程的基本原理是利用圆弧插补指令,通过设定起点、终点和插补段数,实现数控机床在x、y、z 三个线性轴和a、c 两个旋转轴上的圆弧运动。
在编程过程中,需要确定圆弧的半径、起点、终点和插补段数等参数。
三、圆弧编程的参数设定1.圆弧半径:圆弧半径是圆弧编程中的重要参数,决定了圆弧的形状和大小。
在编程时,需要根据加工零件的实际形状和尺寸,设定合适的圆弧半径。
2.起点:起点是圆弧的起始位置,决定了圆弧的起始方向。
在编程时,需要根据加工零件的实际形状和尺寸,设定合适的起点。
3.终点:终点是圆弧的结束位置,决定了圆弧的结束方向。
在编程时,需要根据加工零件的实际形状和尺寸,设定合适的终点。
4.插补段数:插补段数是圆弧编程中的另一个重要参数,决定了圆弧的平滑程度。
在编程时,需要根据加工零件的实际形状和尺寸,设定合适的插补段数。
四、圆弧编程的实例演示假设我们要在x、y、z 三个线性轴和a、c 两个旋转轴上,实现一个半径为50mm 的圆弧运动,起点为(0,0,0),终点为(100,0,0),插补段数为4,可以编写如下圆弧编程代码:```G90 G54 G17 G40 G49G28 G91 Z0G90M6 T1M3 S3000G1 X0 Y0 Z50 F1000G2 X100 Y0 Z0 F1000T2 M8```五、圆弧编程的注意事项1.在编程时,应根据加工零件的实际形状和尺寸,合理设定圆弧半径、起点、终点和插补段数等参数。
FIDIA五轴简易说明书
F I D I A五轴简易说明书 Revised by Petrel at 2021FIDIA五轴加工中心基础操作目录一、机床概述二、操作面板三、CNC的编程第一章机床概述名称:五轴高速数控铣床型号:Y2K411厂家:fidiaS.P.A主要技术参数:主轴转速:24000rpm主轴功率:27KWX2数控系统:FIDIAC20工件台面尺寸:5000×2200MM工作台最大载重:20000KG实际加工尺寸:X轴4200mm、Y轴110mm、Z轴1000mmA轴(主机床)95°~-110°(附机床)-95°~110°C轴±180°第二章操作面板一、启动和关闭1、启动:打开主机电源后进入windows见面,点击“开始”选择“程序”再选择FidiaUtility文件,然后点击Userinterface进入用户界面。
2、关闭:从File菜单上选择关闭Exit,关闭CNC的命令页面(其它相关的系统界面先关闭,主界面才会关闭)。
最后关闭电脑再关闭总电源。
二、应用窗口界面在CNC命令界面被执行后,在显示器上显示出一个窗口,它占有了整个桌面,其组成如下:A菜单条B显示和工作区域陈列,取决于上下文,位置值,对话窗口,图,目录以及使用者输入值或其它数据的参数或命令窗口C一个按时间顺序显示CNC信息的盒子D垂向软件键条E横向软件键条F日期和时刻1、横向软件键条:RES T·RESTCNC:机床恢复ZERO·RQ:各轴自动顺序回机床零点(Z、A、C、Y、X)·X、Y、Z、A、C:单独轴选择回零点SETCOMMAND:设置命令屏幕显示:F进给S转速UNIT公/英制单位RCTP(五轴连动)OF/ONTOOLCOORD刀具坐标轴OF/ONROTO当前原点坐标的旋转角度SETCOMMAND·SETORIGIN:设置加工原点坐标(1-10个)机床的原点为零号坐标系,是不能更改的。
FIDIA五轴简易说明书
F I D I A五轴简易说明书 Revised by Petrel at 2021FIDIA五轴加工中心基础操作目录一、机床概述二、操作面板三、CNC的编程第一章机床概述名称:五轴高速数控铣床型号:Y2K411厂家:fidiaS.P.A主要技术参数:主轴转速:24000rpm主轴功率:27KWX2数控系统:FIDIAC20工件台面尺寸:5000×2200MM工作台最大载重:20000KG实际加工尺寸:X轴4200mm、Y轴110mm、Z轴1000mmA轴(主机床)95°~-110°(附机床)-95°~110°C轴±180°第二章操作面板一、启动和关闭1、启动:打开主机电源后进入windows见面,点击“开始”选择“程序”再选择FidiaUtility文件,然后点击Userinterface进入用户界面。
2、关闭:从File菜单上选择关闭Exit,关闭CNC的命令页面(其它相关的系统界面先关闭,主界面才会关闭)。
最后关闭电脑再关闭总电源。
二、应用窗口界面在CNC命令界面被执行后,在显示器上显示出一个窗口,它占有了整个桌面,其组成如下:A菜单条B显示和工作区域陈列,取决于上下文,位置值,对话窗口,图,目录以及使用者输入值或其它数据的参数或命令窗口C一个按时间顺序显示CNC信息的盒子D垂向软件键条E横向软件键条F日期和时刻1、横向软件键条:RES T·RESTCNC:机床恢复ZERO·RQ:各轴自动顺序回机床零点(Z、A、C、Y、X)·X、Y、Z、A、C:单独轴选择回零点SETCOMMAND:设置命令屏幕显示:F进给S转速UNIT公/英制单位RCTP(五轴连动)OF/ONTOOLCOORD刀具坐标轴OF/ONROTO当前原点坐标的旋转角度SETCOMMAND·SETORIGIN:设置加工原点坐标(1-10个)机床的原点为零号坐标系,是不能更改的。
数控五轴xza方向的圆弧编程
数控五轴xza方向的圆弧编程摘要:一、前言二、数控五轴xza 方向的圆弧编程介绍三、编程方法四、编程实例五、总结正文:一、前言在现代制造业中,数控技术已经成为了不可或缺的一部分。
在数控加工中,五轴数控机床由于其高精度、高效率的特点被广泛应用。
在五轴数控机床中,xza 方向的圆弧编程是一种常见的编程方式,它能够实现对复杂形状零件的加工。
本文将详细介绍数控五轴xza 方向的圆弧编程。
二、数控五轴xza 方向的圆弧编程介绍数控五轴xza 方向的圆弧编程是指在五轴数控机床上,通过编写程序,控制刀具沿x、z、a 三个轴向进行圆弧运动,以实现对工件的加工。
这种编程方式能够实现对复杂形状零件的加工,如螺旋桨、叶片等。
与传统的数控编程相比,五轴xza 方向的圆弧编程需要更高的编程技巧和经验。
三、编程方法数控五轴xza 方向的圆弧编程主要采用G02 和G03 两个指令。
G02 指令用于顺时针圆弧运动,G03 指令用于逆时针圆弧运动。
在编写程序时,需要根据零件的形状和加工要求,选择合适的指令。
编程时,还需要考虑刀具的半径补偿和长度补偿。
半径补偿用于补偿刀具直径引起的加工误差,长度补偿用于补偿刀具磨损引起的加工误差。
在编写程序时,需要根据刀具的实际参数进行设置。
四、编程实例下面以一个简单的数控五轴xza 方向的圆弧编程实例进行说明。
假设我们要加工一个直径为100mm、高度为50mm 的圆柱形零件,刀具的直径为20mm。
1.首先,开启数控机床,并设置好刀具的半径补偿和长度补偿。
2.编写G00 指令,将刀具移至加工起点。
3.编写G02 指令,进行顺时针圆弧运动,加工直径为100mm 的圆弧。
4.编写G01 指令,进行直线运动,加工高度为50mm 的部分。
5.编写G02 指令,进行逆时针圆弧运动,加工直径为100mm 的圆弧。
6.编写G00 指令,将刀具移至加工终点。
五、总结数控五轴xza 方向的圆弧编程是一种常见的编程方式,能够实现对复杂形状零件的加工。
五轴说明书(编程部分)
第二章编程篇2.1 准备功能G代码的种类准备功能G代码及后数字表示,规定其所在的程序的意义。
G代码有一下两种类型:(例)G01和G00是同组的模态G代码G01 X______;Z__________;G01有效X__________;G01有效Z__________;G00有效注:具体的系统参数请参考系统参数表G代码及功能表U、V、W分别和A、B、C 同义,同时使用A 和U 或B 和V 等会产生错误(也就是一行中用了两次A)。
在U、V、W 代码的描述中没有指定它们在同一程序行使用的次数,但A、B、C 代码的描述决定了他们只能使用一次。
2.1.1快速直线移动- G00(1)对于快速直线移动,程序G00 X__ Y__ Z__ A__ C__ 中的所有功能字,除了至少选用其中的一个外其它都为可选,如果当前移动模式为G00那么G00也是可选的,刀具可以以协调线性移动的方式以最大进给到达目的点,执行G00命令不会有切削动作发生。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
执行G16 时的当前点坐标就是极坐标原点。
如果在程序中省略了所有的轴功能字将会产生错误。
如果启用了刀具半径补偿,刀具的移动将与上面所描述的不同(见刀具补偿)。
如果程序在同一行有G53 命令,刀具的移动也同与上述不同(见绝对坐标系)。
2.1.2 以进给直线切削– G01(1)对于以进给直线切削来说,程序G01 X__ Y__ Z__ A__ C__中的所有功能字,除了必须至少使用的之外其它的轴功能字都为可选。
如果当前移动模式为G01,那么G01也是可选的,刀具将以协调线形移动的方式以当前进给移动到目的地。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
FIDIA五轴简易说明书

FIDIA五轴加工中心基础操作目录一、机床概述二、操作面板三、CNC的编程第一章机床概述名称:五轴高速数控铣床型号:Y2K411厂家:fidiaS.P.A主要技术参数:主轴转速:24000rpm主轴功率:27KWX2数控系统:FIDIAC20工件台面尺寸:5000×2200MM工作台最大载重:20000KG实际加工尺寸:X轴4200mm、Y轴110mm、Z轴1000mm A轴(主机床)95°~-110°(附机床)-95°~110°C轴±180°第二章操作面板一、启动和关闭1、启动:打开主机电源后进入windows见面,点击“开始”选择“程序”再选择FidiaUtility文件,然后点击Userinterface进入用户界面。
2、关闭:从File菜单上选择关闭Exit,关闭CNC的命令页面(其它相关的系统界面先关闭,主界面才会关闭)。
最后关闭电脑再关闭总电源。
二、应用窗口界面在CNC命令界面被执行后,在显示器上显示出一个窗口,它占有了整个桌面,其组成如下:A菜单条B显示和工作区域陈列,取决于上下文,位置值,对话窗口,图,目录以及使用者输入值或其它数据的参数或命令窗口C一个按时间顺序显示CNC信息的盒子D垂向软件键条E横向软件键条F日期和时刻1、横向软件键条:RES T·RESTCNC:机床恢复ZERO·RQ:各轴自动顺序回机床零点(Z、A、C、Y、X)·X、Y、Z、A、C:单独轴选择回零点SETCOMMAND:设置命令屏幕显示:F进给S转速UNIT公/英制单位RCTP(五轴连动)OF/ONTOOLCOORD刀具坐标轴OF/ONROTO当前原点坐标的旋转角度SETCOMMAND·SETORIGIN:设置加工原点坐标(1-10个)机床的原点为零号坐标系,是不能更改的。
·SAVEORIGIN:记录坐标数据·RSETORIGIN:恢复坐标数据·CQAHADWH:手轮调节偏移量OF/ONSAVERESTORE:SAVE记录·TOOLTABLE刀具表RESTORE恢复·TOOLTABLE刀具表2、竖向软件键条:CNC环境·PARCNC(参数)·SWITCH使能/禁止阅读被编程的功能·AXIS各轴开关·FSC各轴镜像·MDCNC选择零件程序的执行模式·CQA各轴偏移量·ROTANG·ROTANG以坐标系旋转·ROTCEN以中心旋转·PROGLIM程序限位·AXISLIM轴限位·SAFETYLIM安全限位·TOOLTABLE:刀具表(0号为当前主轴无刀,1-41号为可自动/手动换刀,42号为测头专用刀位,43-100号为自定义刀号)Type1–圆柱平刀具Type2–圆柱圆角刀具Type3–球状刀具Type4–球状刀具,带一个圆周嵌入件Type5–圆柱圆角刀具,带两个圆周嵌入件Type6–圆柱圆角刀具,带两个方嵌入件Type7–锥状刀具,带平刀尖Type8–锥状刀具,带圆角刀尖Type9–镗刀Type10–带刀尖的刀具类型1圆柱体刀具类型2复合型刀具类型3球头刀具类型4带一个嵌入件的球头刀具类型5带两个圆形嵌入件的复合型刀具类型6带方形嵌入件的复合型刀具类型7带平端头的锥体刀具类型8带复合型端头的锥体刀具CNC环境·EXECUTE执行窗口·EXECUTEFILE执行一个零件程序。
五轴CNC教学手册

章節: 原點複歸
原點複歸
手動,MDI 模式下輸入 L X0 Y0 C0 A0 F2000 M31,執行 Cycle Star
呼叫刀具
手動,MDI 模式下,輸入 Tool Call (刀具號碼),執行 Circle Start,呼叫完成.
8
雷射測頭(Renishaw)
目前 Renishaw 基準刀具設定在 47 號,測頭設定在 46 號(PLC00001),啟動前須先作 換刀的動作,才會啟動測頭。 動作範例 A.環規校正在控制器上選擇”接觸式探針”再選環規校正 Ps:注意若要求測頭精度準確,於程式設計時,F 進給量設定在 80~100 左右,精度才 會準確。 於控制面板上輸入數據如下: Radius ring gauge 環規半徑 15
五 軸 CNC 教 學 手 冊
章節: /路徑功能概述
1
路徑功能概述
STOP 的輸入與應用
若於單節中編輯了 STOP,程式的執行或是測試執行會因這個單節而中斷,例如為了 檢視刀具。
2
章節: /路徑功能概述
定義素材大小最小點 定義素材大小最大點
11
章節: 操作程序
24 L Y-65 25 L Z+10 26 L X-65 Y+0 27 L Z-10 28 L X+65 29 L Y+65 30 L X+49.5 Y+49.5 RR 31 L X-49.5 32 L Y-49.5 33 L X+49.5 34 L Y+65 35 L Z-10 R0 36 L X-0.1 37 L Y-65 38 L X+0.1 39 L Y+65 40 L Z+10 41 L X-65 Y-0.1 42 L Z-10 43 L X+65 44 L Y+0.1 45 L X-65 46 L Z+10 47 L X+65 Y+65 48 L Z-10 49 L X+49.45 Y+49.45 RR
五轴说明书

五轴车床触摸屏说明书北京京联发数控科技有限公司2009年5月目录手动运行 (3)自动运行 (7)编辑程序 (8)参数设定 (11)注意事项 (12)触摸屏使用说明手动运行时黄灯亮,自动时绿灯亮,有报警时红灯亮。
手动运行:手动运行由以下几部分构成:锁定:禁止/允许对屏幕的触摸操作。
当程序自动运行时须按下此键!!!用于防止误碰触摸屏引起误动作。
运动状态显示部分:用于显示当前各轴位置,单位毫米,速度,各轴限位状态。
控制状态显示部分:用于显示当前运动对应的G指令。
变频器部分:控制主轴的运动。
点动增量:设定各轴的点动时运动步长。
速度控制:设定各轴的运动速度。
运动控制部分:用于控制各轴的运动,如点动、连续运动、回原点、设原点等。
1)显示部分:状态指示灯:绿色表示该轴没有碰到限位和行程开关。
(以X1轴为例)X1+/X1-正常时时绿色,当X轴碰到正/负限位时,X+/X-会变成红色运行OK灯:显示各轴伺服驱动器运行OK输入点的状态。
(红为故障,绿为正常)如果为红色,请先按运动控制区域中的“报警清除”按钮,此时运行OK灯变绿,然后再试。
(OK灯变红系统将认为没有准备好,且对其他运动操作不做响应)如仍变红,请先排除故障。
位置显示:显示当前各轴位置。
(单位毫米)速度显示:运动时,显示当前运动轴速度。
单位:米/分钟锁定:禁止/允许对屏幕的触摸操作。
点击【锁定】按钮:屏幕四周将变红,此时不接受任何除【锁定】按钮外的触摸和操作。
再次点击【锁定】按钮,则解除禁止操作状态。
2)点动增量,速度设定部分:点动距离设定:点击“DS”按钮或点击距离显示区域,都可弹出一个计算器,用于该值的设定,在计算器中按“=”按钮,将把数值填到显示区域内。
速度设定:点击“F”按钮或点击距离显示区域,都可弹出一个计算器,用于该值的设定,在计算器中按“=”按钮,将把数值填到显示区域内。
当输入的速度大于加工限速时,系统将默认填入加工限速。
3)运动控制:当某轴被按下时,以下操作都是对该轴的操作回参考点:点击“回参考点”使当前轴回到设定的参考点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章编程篇2.1 准备功能G代码的种类准备功能G代码及后数字表示,规定其所在的程序的意义。
G代码有一下两种类型:(例)G01和G00是同组的模态G代码G01 X______;Z__________; G01有效X__________; G01有效Z__________; G00有效注:具体的系统参数请参考系统参数表G代码及功能表U、V、W分别和 A、B、C 同义,同时使用 A 和 U 或 B 和 V 等会产生错误(也就是一行中用了两次 A)。
在 U、V、W 代码的描述中没有指定它们在同一程序行使用的次数,但 A、B、C 代码的描述决定了他们只能使用一次。
2.1.1快速直线移动 - G00(1)对于快速直线移动,程序 G00 X__ Y__ Z__ A__ C__ 中的所有功能字,除了至少选用其中的一个外其它都为可选,如果当前移动模式为G00那么G00也是可选的,刀具可以以协调线性移动的方式以最大进给到达目的点,执行G00命令不会有切削动作发生。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
执行 G16 时的当前点坐标就是极坐标原点。
如果在程序中省略了所有的轴功能字将会产生错误。
如果启用了刀具半径补偿,刀具的移动将与上面所描述的不同(见刀具补偿)。
如果程序在同一行有 G53 命令,刀具的移动也同与上述不同(见绝对坐标系)。
2.1.2 以进给直线切削– G01(1)对于以进给直线切削来说,程序G01 X__ Y__ Z__ A__ C__中的所有功能字,除了必须至少使用的之外其它的轴功能字都为可选。
如果当前移动模式为G01,那么G01也是可选的,刀具将以协调线形移动的方式以当前进给移动到目的地。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
执行 G16 时的当前点坐标就是极坐标原点。
如果在程序中省略了所有的轴功能字将会产生错误。
如果启用了刀具半径补偿,刀具的移动将与上面所描述的不同(见刀具补偿)。
如果程序在同一行有 G53 命令,刀具的移动也同与上述不同(见绝对坐标系)。
2.1.3以进给圆弧切削-G02和 G03用 G02(顺时针圆弧)或 G03(逆时针圆弧)来切削圆弧或螺旋,在机床坐标系中圆弧或螺旋的轴线必须与 X、Y 或 Z 轴平行。
可以用 G17(Z 轴,XY-平面)、G18(Y 轴,XZ-平面)、G19(X 轴,YZ-平面)来选择工作平面,如果圆弧是圆那么它应该位于与被选平面平行的平面上。
如果加工圆弧的代码定义了旋转轴的转动,转动轴将以恒定的速度转动,这样它会随 X、Y、Z 轴转动和停止,一般不使用这种程序。
如果启用了刀具半径补偿,刀具移动将与上面所描述的不同(见刀具补偿)。
圆弧的描述方法有两种,我们称它们为圆心格式和半径格式,在圆弧切削模式中半径模式和圆心模式都是可选的。
2.1.3.1 半径模式圆弧切削在半径格式圆弧切削模式中,指定被选平面内的弧线终点的坐标为圆弧半径,程序G02 X___ Y___ Z___ A___ B____ C___ R___(或把G02换成G03)中,R表示圆弧半径,除了所选切削的角度在 0-180°之间,当半径为负数时圆弧切削的角度在180-359.999°之间。
如果圆弧为螺旋线,圆弧终点在平行于螺旋线轴线的坐标平面上的坐标位置也可以指定。
如果出现下列情况将会出错:(1)所选平面上两根轴的功能字都被忽略。
(2)圆弧的终点位置就是起点位置。
如果圆弧是圆或半圆,最好不要使用半径格式切削,因为圆弧终点很小的变化可能使圆心位置发生很大的变化(圆弧的中心也会发生很大变化)。
如果影响足够大化整误差会导致规定公差之外的切削,如果圆弧接近整圆加工情况很而劣,如果圆弧是半圆(或接近半圆)加工情况比较比较严重,其它的角度(角度从很小到165°或从195°到345°)的圆弧加工出的工件符合要求。
下面是半径格式铣圆弧命令的例子:G17 G02 X10 Y15 R20 Z5这个命令是顺时针(从 Z 轴的正方向观察)切圆弧或螺旋线,圆弧的轴线平行于 Z 轴,终点坐标是 X=10、Y=15、Z=5,并且其半径为 20。
如果起点的 Z 轴坐标是 5,那么这个圆弧是平行于 XY 平面的圆,否则它就是一条螺旋形的弧线。
2.1.3.2 圆心格式圆弧切削在圆心格式圆弧切割中,所选平面内的圆弧终点坐标是根据当前位置与圆弧圆心的偏移量来指定的,如果圆弧终点和与当前点重合是可行的,下面的情况是错误的:在圆弧所在的平面上,如果当前点与圆弧圆心的距离比圆弧终点与圆弧圆心的距离大于 0.002 毫米/英寸(和系统使用的单位一致)。
圆弧的圆心可用 I 和 J 功能字来指定,有两种方法来解释它们,第一种是 I 和 J 指定与在圆弧起点的当前点相关的点为圆心,也叫增量 I/J 模式;第二种 I 和 J 指定当前坐标系得实际坐标为圆心,也叫绝对 IJ 模式。
I/J 模式是在配制下拉菜单状态对话框中设置,I/J 模式的选择要与商业化的控制系统兼容,您会发现增量 IJ 模式是最好的,因为在增量模式中如果圆心位置不在圆弧起点时您需要同时使用功能字 I 和 J。
如果您选择的工作平面是 XY 平面,程序G02 X__ Y__ Z__ A__ B__ C__ I__ J__(或用G03代替G02),那么除了必须使用 X 轴或 Y 轴的功能字之外,其它的所有轴功能字都是可选的。
I 和 J 是圆心与当前位置偏移量或当前坐标的偏移量(这取决于 I/J 模式,X 和 Y各自得方向),I 和 J 功能字都是可选但必须选择一个,如果出现下列的情况就会导致错误:(1)X 和 Y 功能字都被忽略。
(2)I 和 J 功能字都被忽略。
如果选择的工作平面是 XZ 平面,程序G02 X__ Y__ Z__ A__ B__ C__ I__ K__(或用G03代替G02),那么除了必须使用 X 轴或 Z 轴的功能字之外,其它的所有轴功能字都是可选的。
I 和 K 是圆心与当前位置偏移量或当前坐标的偏移量(这取决于 I/J 模式,X和 Z 各自得方向),I 和 K 功能字都是可选但必须选择一个,如果出现下列的情况就会导致错误:(1)Y 和 Z 功能字都被忽略。
(2)I 和 K 功能字都被忽略。
如果选择的工作平面是 YZ 平面,程序 G02 X__ Y__ Z__ A__ B__ C__ J__ K__ (或用G03代替G02),那么除了必须使用 Y 轴或 Z 轴的功能字之外,其它的所有轴功能字都是可选的。
J 和 K 是圆心与当前位置偏移量或当前坐标的偏移量(这取决于 I/J 模式,Y 和Z 各自得方向),J 和 K 功能字都是可选但必须选择一个,如果出现下列的情况就会导致错误:(1)Y 和 Z 功能字都被忽略。
(2)J 和 K 功能字都被忽略。
下面是用增量 I/J 模式圆心格式圆弧切削命令的例子:G17 G02 X10 Y16 I3 J4 Z9这个命令是顺时针(从 Z 轴的正方向观察)切圆弧或螺旋线,圆弧的轴线平行于 Z轴,圆弧的终点坐标是 X=10、Y=16、Z=9,圆心在 X 轴方向上的偏移量为3 个单位,在 Y 轴方向上的偏移量为 4 个单位,如果圆弧起点位置为 X=7、Y=7,那么圆心的坐标为 X=10、Y=11。
如果起点的 Z 轴坐标为 9 这个圆弧是个圆,否则它就呈螺旋状,并且圆弧的半径为 5。
如果上面的圆弧使用绝对 I/J 模式圆心格式圆弧切削,其命令如下:G17 G02 X10 Y16 I10 J11 Z9中心格式圆弧切削中弧的半径不能被指定,但是它可以很容易地找出圆弧半径,因为它就是从圆弧圆心到当前点或圆弧终点的距离。
2.1.4 暂停- G04暂停对应的程序为 G04 P___ ,这可以使得轴在 P数字指定的时间(单位为秒或毫秒)内停止,时间单位在配置下拉菜单逻辑对话框中设置。
如果时间单位为秒 G04 P0.5将使得轴暂停 0.5 秒,如果出现这样的情况会出错:P 数字为负,2.1.5设定坐标系刀具偏移量和工件偏移量 - G10设置刀具偏移量的程序如 G10 L1 P__ X__ Z__ A__ ,其中 P 数字必须是从 0 到 255 的整数,刀具偏移量设定格式为:刀具号码-P 数字指定的刀具偏移量,刀尖半径可以通过 A 数字设定,上面的程序中包括的轴功能字的数值也可以设定,但是刀具半径并不能通过这种方法来设定。
设定夹具坐标系原点的坐标值可以用程序 G10 L2 P__ X__ Y__ Z__ A__ B__ C__ ,其中 P 数字必须是从 1 到 255 的整数,设定夹具偏移量的格式为:刀具夹具编号-1~6中的任何一个数字(其中 1 到 6 分别对应 G54 到G59),其他所有轴功能字都是可选的。
由 P 数字指定的坐标值是夹具坐标系原点在绝对坐标中的坐标值,只有程序行中包含轴功能字的那些坐标才会被重置。
如果出现下面的情况将出现错误:P 数字不识从 0 到 255 的整数。
如果原点偏移量(由 G92 或 G93 指定)在 G10 被使用之前就已经生效,在后面的程序中原点偏移量将继续生效。
如果坐标系原点由 G10 命令设定,在 G10 执行期间坐标系原点可能起作用也可能不起作用。
如果不是使用表格上面的保存按钮保存刀具偏移量和夹具偏移量,这些偏移量不会一直有效例如:程序 G10 L2 P1 X3.5 Y17.2把第一个坐标系的原点(该坐标系统由 G54选定)设定在 X=3.5、Y=17.2(绝对坐标系坐标值)的位置。
坐标系原点的 Z 轴坐标(以及所有旋转轴的坐标)是程序行执行之前使用的坐标原点的 Z 轴坐标。
2.1.6顺时针和逆时针圆切削 - G12和 G13圆切削命令是有固定周期的命令,可以用它来切一个比刀具直径大的圆孔,如果使用合适的刀具可以切出 O 型内槽。
程序 G12 I__ 控制刀具顺时针转动,G13 I__ 控制刀具逆时针转动。
如果执行上面的命令,刀具会在 X 方向按 I 功能字指定的距离移动,并切割一个以 X和 Y 坐标为圆心的圆,切削完成之后刀具回到圆心。
如果备选平面不是 XY 平面,它的影响还没有定义。