URWPGSim2D开发人员手册-20120110
热模拟教学手册

Battery Connector 材质Connector_0.3W/mK 导热系数0.3W/mK 发射率0.8
Rev0.0
各零件的形状和属性的创建
n RHE和其连接部件
备注:后面没有辐射分割 的 表示不需要考虑辐射
Rev0.0
各零件的形状和属性的创建
n ODD
ODD Unit ODD Rear BRKT Connector Bezel
ODD Unit 材质HDD_10W/mK 导热系数10W/mK 发射率0.6 辐射分割10mm(正反两面其他不考 虑辐射) HDD Bezel 材质Casing_0.3W/mK 导热系数0.3W/mK 发射率0.9
Fan cover 材质Al5052_140W/mK 导热系数140W/mK 发射率0.6
Rev0.0
各零件的形状和属性的创建
n PCB板
*PCB确切的导热系数需要计算 获得,请参考热模拟参数 等价计算_PCB导热系数 计算 PCB 材质Cu+FR4 导热系数平面方向0.4W/mK ,垂直方向60W/mK 发射率0.8
Rev0.0
热模拟的作业作业流程
n 热模拟的作业流程
输入
PCB 数据(EMC、EMN、EMP、 Pro/E数据ß [MED](Str ucture ) 材质清单ß [MED](Structure ) Block,厚度和含铜率) ß[HWD](Layout) 平台信息 ß [HWD](Logic)
注意:Flotherm的坐标原 点要和Pro/E的一样 ,否则零件导入时位 置不对,调整比较麻 烦。
Working Model 2D 仿真教程

第一章 機構之自由度、位移、速度和加速度的計算與分析 1.1簡介一個剛體在二維空間之自由度應為三,在二維空間是一平面時,這剛體可以沿兩個線性無關之方向作平移,又可以在此平面上作旋轉,而其旋轉軸線與此平面垂直。
一個剛體在三維空間之自由度應為六,即此剛體可以沿三個線性無關之方向作平移,又可圍繞三個線性無關方向之軸線作旋轉。
自由度(Degrees of freedom)的定義是表示一個機構中,每一連桿位置所 需之獨立參數的最小數目。
由於機構是由機件以接頭連接而成,因此它的自由度是所有機件在尚未連接和固定前的總自由度,扣除所有接頭的總拘束度(Degrees of constraint),再扣除固定機架件的自由度。
1.2 平面機構自由度公式對平面機構而言,每一根可動的機件其有三個自由度,其中二個自由度 為兩互相垂直軸的平移(Translation),另一個自由度為繞任意一點的旋轉(Rotation) 。
M=3(N-1)-2f1-f2M: 自由度總數N: 所有連桿數目(包括固定地面之連桿)f1: 一個自由度接頭數目(如旋轉軸承)f2: 兩個自由度接頭數目(如凸輪、齒輪)例題一.試求如下圖所示平面四連桿機構的自由度此四連桿機構,皆為旋轉接頭,則自由度為M=3(4-1)-2*4=11.3 空間機構自由度公式對空間機構而言,每一根可動的機件其有六個自由度,其中三個自由度為三互相垂直軸的平移,另三個自由度為對此三軸的旋轉。
M=6(N-1)-ΣJ i C iM: 自由度總數N: 所有連桿數目(包括固定地面之連桿)J i: i型接頭數目C i: i型接頭的拘束度例題二.試求如下圖所示RSSR空間四連桿機構的自由度此四連桿機構,其中R1、R2為旋轉對, S1、S2為圓球對,則自由度為 M=6(4-1)-5*2-3*2=2當M≧1時,此為一個有M個自由度機構M=0時,此為一靜定結構M≦0時,此為一靜不定機構1.4 i型接頭種類第二章 Working Model 2D機構應用軟體之實例分析 2.1 簡介Working Model 2D為利用複雜的編輯功能來提供一個完整的專業的動態模擬,對於牛頓運動力學上的機構也可以利用Working Model 2D在電腦上模擬,它並且提供一些簡易的圖解讓使用者更容易從事實驗,及分析不同的運動情況。
操作手册2012版
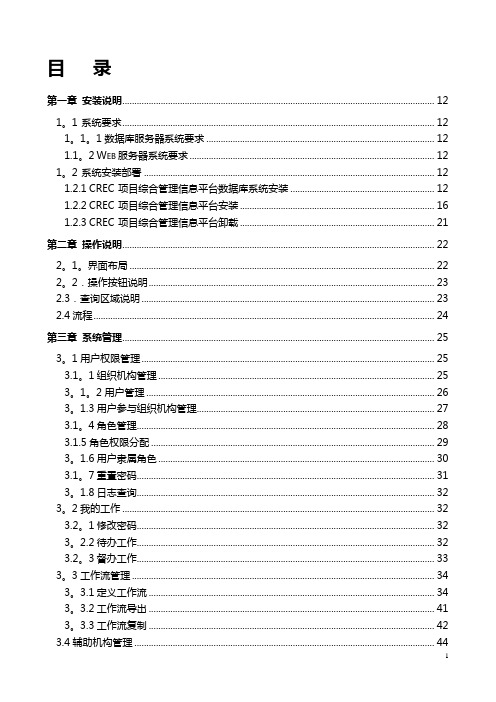
目录第一章安装说明 (12)1。
1系统要求 (12)1。
1。
1数据库服务器系统要求 (12)1.1。
2W EB服务器系统要求 (12)1。
2系统安装部署 (12)1.2.1CREC项目综合管理信息平台数据库系统安装 (12)1.2.2CREC项目综合管理信息平台安装 (16)1.2.3CREC项目综合管理信息平台卸载 (21)第二章操作说明 (22)2。
1。
界面布局 (22)2。
2.操作按钮说明 (23)2.3.查询区域说明 (23)2.4流程 (24)第三章系统管理 (25)3。
1用户权限管理 (25)3.1。
1组织机构管理 (25)3。
1。
2用户管理 (26)3。
1.3用户参与组织机构管理 (27)3.1。
4角色管理 (28)3.1.5角色权限分配 (29)3。
1.6用户隶属角色 (30)3.1。
7重置密码 (31)3。
1.8日志查询 (32)3。
2我的工作 (32)3.2。
1修改密码 (32)3。
2.2待办工作 (32)3.2。
3督办工作 (33)3。
3工作流管理 (34)3。
3.1定义工作流 (34)3。
3.2工作流导出 (41)3。
3.3工作流复制 (42)第四章合同管理 (46)4.1总包合同 (46)4。
2总包合同评审 (46)4。
3总包合同变更 (47)4。
4总包合同统计 (48)第五章项目基本信息管理 (49)5。
1项目基本信息 (49)5.2项目基本信息查询 (49)5。
3项目作业队 (49)5.4作业队参与成本工作分解 (49)5.5招投标信息 (49)第六章成本管理 (50)6.1成本工作分解 (50)6.2成本计划编制 (51)6.3大宗料备料计划 (54)6.4其他材料备料计划 (55)6.5对内验工 (57)6。
6对内验工统计 (59)6.7对外验工 (59)6.8对外验工统计 (59)6。
9全部成本计划汇总 (59)6.10已审核成本计划汇总 (59)6。
11未审核成本计划汇总 (59)6。
PGM2软件包说明书

Package‘PGM2’October12,2022Type PackageTitle Nested Resolvable Designs and their Associated Uniform DesignsVersion1.0-1Date2016-12-17Imports statsAuthor Mohamed Laib,Abla Boudraa and Zebida Gheribi-AoulmiMaintainer Mohamed Laib<******************>URL<https:///site/mohamedlaibwebpage/>Description Construction method of nested resolvable designs froma projective geometry defined on Galoisfield of order2.The obtainedResolvable designs are used to build uniform design.The presented resultsare based on<https:///doc/219563>and A.Boudraa et al.(See references). License GPL-3Encoding UTF-8LazyData trueRoxygenNote5.0.1NeedsCompilation noRepository CRANDate/Publication2016-12-1722:23:52R topics documented:PGM2-package (2)BIB (3)Gen (4)Resolvable (5)Steps (6)Uniform (7)Index912PGM2-package PGM2-package Nested Resolvable Designs and their Associated Uniform DesignsDescriptionConstruction method of nested resolvable designs from a projective geometry defined on Galois field of order2.The obtained Resolvable designs are used to build uniform design.The presented results are based on<https:///doc/219563>and A.Boudraa et al.(See references).NoteThis work established in same time with the article intitled:Abla Boudraa et al.,Recursive method for construction of nested resolvable designs and uniform designs associated,International Journal of Research and Reviews in Applied Sciences,(17),Issue2(2013).Author(s)Mohamed Laib,Abla Boudraa and Zebida Gheribi-AoulmiMaintainer:Mohamed Laib<******************>ReferencesD.DuguéTraitéde statistique théorique et appliquée,Masson et Cie,1958.Gheribi-Aoulmi.Z and M.Bousseboua Recursive methods for construction of balanced n-ary block designs.Serdica Math.J(31),2005,189-200Fang.K.T et al.,Constructions of uniform designs by using resolvable packings and coverings.Discrete Math.(19),2003,692-711.Abla Boudraa,Zebida Gheribi-Aoulmi and Mohamed Laib.Recursive method for construction of nested resolvable designs and uniform designs associated.International Journal of Research and Reviews in Applied Sciences.V ol.17,Issue2(2013).Fang.K.T et al.,Construction of uniform designs via super-simple resolvable t-designs.Util.Math.(66).2004,15-32.Examplesm<-4X<-BIB(m)n<-1mat<-X$BIBY<-Resolvable(n,mat)#Extract the RBIBn<-1mat<-X$BIBX2<-Gen(n,mat)#Extract the BIBD of the second generation##Not run:#Algorithm of the3rd example in the paper:(Abla Boudraa&al)IJRRAS.#(17),Issue2(2013).BIB3bib<-BIB(3)$BIBmat<-NULLfor(i in1:15){mat[[i]]<-Gen(i,bib)$BIB2}x<-Reduce("rbind",mat)e<-dim(x)[1]b<-dim(x)[2]v<-bib[1,]for(i in1:e){for(j in1:b){if(any(x[i,j]==v)){x[i,j]<-0}}}for(i in e:1){if(all(x[i,]==0)){x<-x[-i,]}}s<-x[1,]s<-s[s>0]h<-length(s)f<-dim(x)[1]x1<-matrix(nrow=f,ncol=h)for(i in1:f){x1[i,]<-x[i,][x[i,]>0]}A<-unique(x1)UD<-Uniform(A)##End(Not run)BIB Balanced Incomplete binary Blocks DesignsDescriptionGives the configuration of a Balanced Incomplete binary Blocks Designs(BIBD)using a projective geometry on a Galois Field of order2GF(2).UsageBIB(m)Argumentsm Dimension of the projective geometry defined on GF(2)ValueA LIST of:1.V Number of treatments in the BIBD.2.B Number of blocks of the BIBD.3.R Repetition of each treatment.4.K Size of each block.5.BIB The configuration of the BIBD.4GenAuthor(s)Mohamed Laib,Abla Boudraa and Zebida Gheribi-AoulmiReferencesD.DuguéTraitéde statistique théorique et appliquée,Masson et Cie,1958.Examplesm<-4X<-BIB(m)#BIB from PG(4,2)Gen Balanced Incomplete binary Blocks Designs of second Generation.DescriptionGives the configuration of a Balanced Incomplete binary Blocks Designs of seconde generation. UsageGen(n,mat)Argumentsn The sub-variety of the block to be deleted.mat The matrix of the BIB.ValueA LIST of:1.V Number of treatments in the BIBD.2.B Number of blocks of the BIBD.3.R Repetition of each treatment.4.K Size of each block.5.BIB The configuration of the BIBD.Author(s)Mohamed Laib,Abla Boudraa and Zebida Gheribi-AoulmiReferencesD.DuguéTraitéde statistique théorique et appliquée,Masson et Cie,1958.Resolvable5Examples##Not run:m<-4X<-BIB(m)#BIB from PG(4,2)n<-1mat<-X$BIBX2<-Gen(n,mat)#Extracts the BIB second generation##End(Not run)Resolvable Resolvable Balanced Incomplete Block Design RBIBDDescriptionExtracts the Resolvable Balanced Incomplete Block Design(RBIBD)of any BIBD constructed from a projective geometry.UsageResolvable(n,mat)Argumentsn The sub-variety of the block to be deleted.mat The matrix of the BIB.ValueA LIST of:1.V Number of treatments in the RBIBD.2.B Number of blocks of the RBIBD.3.R Repetition of each treatment.4.K Size of each block.5.BIB The configuration of the RBIBD.Author(s)Mohamed Laib,Abla Boudraa and Zebida Gheribi-AoulmiReferencesD.DuguéTraitéde statistique théorique et appliquée,Masson et Cie,1958.6StepsExamples##Not run:m<-4X<-BIB(m)#BIBD from PG(4,2)n<-1mat<-X$BIBY<-Resolvable(n,mat)#Extracts the RBIBD##End(Not run)Steps Nested Resolvable Designs and associated Uniform Designs in differ-ent stages.DescriptionGives the different stages of nested design begening from a projective geometry,BIBD,BIBD seconde generation,RBIBD and associated uniform designs.UsageSteps(m,n,stage="all")Argumentsm Dimension of the projective geometry defined on GF(2).n The sub-variety of the block to be deleted.stage Stage of recurrence wanted(single value or vector):’all’Print all designs.’S1’Print the configurations of BIB offirst generation.’S2’Print the configurationsof BIB of seconde generation.’S3’Print the configurations of RBIB.’S4’Printthe configurations of the uniform designs associate to each nested resolvable. ValueA LIST,with the parametrs and the configurations on each stages of recurrence.Author(s)Mohamed Laib,Abla Boudraa and Zebida Gheribi-AoulmiReferencesGheribi-Aoulmi.Z and M.Bousseboua Recursive methods for construction of balanced n-ary block designs.Serdica Math.J(31),2005,189-200Examples##Not run:list1<-Steps(4,1)#Get all stages:of the PG(4,2)list2<-Steps(4,1,c( S1 , S2 ))#Get the2first stages:of the PG(4,2)list3<-Steps(4,1,c( S1 , S4 ))#Get the first&the last stage:of the PG(4,2)list4<-Steps(4,1, S4 )#Get the last stage:of the PG(4,2)##End(Not run)Uniform Uniform designsDescriptionBuilds the uniform design(UD)using a Resolvable Balanced Incomplete Block Design(RBIBD) UsageUniform(mat)Argumentsmat The matrix of the RBIBD.ValueA LIST of:1.n Number of experiments.2.F The dimension of the design.3.UD The configuration of the uniform design.Author(s)Mohamed Laib,Abla Boudraa and Zebida Gheribi-AoulmiReferencesFang.K.T et al.,Constructions of uniform designs by using resolvable packings and coverings.Discrete Math.(19),2003,692-711.Fang.K.T et al.,Construction of uniform designs via super-simple resolvable t-designs.Util.Math.(66).2004,15-32.Examples##Not run:m<-4X<-BIB(m)n<-1mat<-X$BIBY<-Resolvable(n,mat)ud<-Uniform(Y$RBIB)#Uniform design##End(Not run)IndexBIB,3Gen,4PGM2(PGM2-package),2PGM2-package,2Resolvable,5Steps,6Uniform,79。
Autodesk Mudbox 2012 Service Pack 2 知识库说明书

Autodesk Mudbox 2012 Service Pack 2 Release NotesThis document describes known limitations, issues, and fixes included in Autodesk Mudbox 2012 Service Pack 2. It is strongly recommended that you read this document before you install this release.ContentsWhat’s Fixed? (1)Feature Limitations and Notes (1)Additional Resources (3)What’s Fixed?The following list contains bug numbers and corresponding descriptions for issues fixed in this release.Limitations and NotesThis section lists known limitations and workarounds for Mudbox 2012 Service Pack 2.Please report any additional issues using the online bug reporting form at:/mudbox-bugreport or from the Help > Report a Problem menu item in Mudbox.∙To run Mudbox 2012 you must have a processor which is SSE3 compliant. Mudbox uses SSE3-specific code, which does not allow Mudbox to run on hardware which is SSE2 or previous.∙Sculpting with the Stamp Spacing property turned on may cause the brush stamp to be offset to the cursor location when using a Wacom Cintiq or a Wacom tablet when the pen setting is set to Mouse mode. To correct this, add the environment variable "MUDBOX_USE_LOWRES_TABLET_DATA".∙With ATi graphics cards, if you are seeing texture painting corruption such as painting black and artifacts, adding the environment variable "MUDBOX_PAINT_CONTEXT_FLUSH" may fix theproblem.∙Some users may be seeing incorrect GPU RAM reporting causing many warnings to pop up every time they create, merge, or change the visibility of layers. The environment variable"MUDBOX_FORCE_GPU_RAM" (on Windows only) lets you override the amount of GPU memory inmegabytes that Mudbox sees. If you have an Nvidia Quadro 5600 and it reports 1 MB of GPU RAM (the hardware has 1.5GB), set the variable to 1536 (which is 1.5 * 1024) for that card. Values which are not numbers will be ignored, and values will be clamped to the range 256 to 4096.Note: For more information on these environment variables, see the Environment Variables topic in the Mudbox Help.∙If you experience any difficulty launching the Mudbox Help using Internet Explorer, use an alternative browser such as Firefox, or download and install the Help locally from/mudbox-helpdownload-enu∙If you previously installed any beta version (including Release Candidate versions) of Autodesk Mudbox 2012, you must uninstall and delete all system folders pertaining to the pre-releaseversions before you can install the commercial version.SDK Examples:On Mac OS X, release configurations may not build correctly. User must set the Active Architecture tox86_64 in Xcode.To do this:1. Open example project using Xcode.2. In menu bar, select Project > Edit Project Settings.3. Select the Build tab.4. Under Architectures in the Setting window, make sure the Architectures value is set to 64-bit Intel.5. Close window and build using the Release configuration.PtexImporter example requires PtexExtractor example to be built and copied into PtexImporter's build directory for linking.To build Turntable example, install Qt and run moc on the example header files. See readme in example.Additional ResourcesFor complete installation and licensing instructions refer to the Installation Overview and FAQ and the Licensing Guide. Access these guides from the Installation Help link of the Mudbox installer or find them here:/mudbox-faq-2012-enu/me-licensing-2012-enuFind new feature information in the "What's New" section of the Mudbox Help at:/mudbox-help-2012-enu-whatsnewFind learning resources for Mudbox at:/mudbox-learningpathWatch videos to learn how to use Mudbox at:/mudbox-trainingvideosFind support resources at:/mudbox-supportFor the latest list of certified hardware to run Mudbox 2012, including graphics cards, refer to the Mudbox 2012 certification chart located at:/mudbox-hardwareFind the Mudbox 2012 minimum system requirements at:/mudbox-systemreq-2012-enuFind documentation and examples for the Mudbox SDK with your installed version of Mudbox here:\Mudbox2012 \SDK\doc or online here:/mudbox-sdkdoc-2012-enuCustomer Involvement Program (CIP)The first time you start Mudbox, the Customer Involvement Program dialog box appears. If you choose to participate in the Customer Involvement Program, Mudbox will automatically send Autodesk information about system configuration, what features you use most, any problems that you encounter, and other information helpful to the future direction of the product. For further information, see /cip.Customer Error Reports (CERs)We are able to improve the stability of Mudbox largely because of the Customer Error Reports (CERs) that users of our products submit. We thank you for taking the time to fill out these reports and ask that you include as much information as possible about what actions you were performing at the time the error occurred. These details raise the value of the report immensely and are very much appreciated by the Autodesk Mudbox Engineering team.For further information about CERs refer to /cer.Autodesk, Backburner, FBX, Maya, MotionBuilder, Mudbox, Softimage, and 3ds Max are registered trademarks or trademarks of Autodesk, Inc., and/or its subsidiaries and/or affiliates in the USA and/or other countries. All other brand names, product names, or trademarks belong to their respective holders. Autodesk reserves the right to alter product and services offerings, and specifications and pricing at any time without notice, and is not responsible for typographical or graphical errors that mayappear in this document.©2011 Autodesk, Inc. All rights reserved.。
NURBS工具箱_中文版3ds Max 2012实用教程_[共3页]
![NURBS工具箱_中文版3ds Max 2012实用教程_[共3页]](https://img.taocdn.com/s3/m/ea083d39f8c75fbfc77db2e9.png)
图3-401
图3-402
图3-403
3.6.4 NURBS工具箱
在“常规”卷展栏下单击“NURBS创建工具 箱”按钮 打开“NURBS工具箱”,如图3-404所 示。“NURBS工具箱”中包含用于创建NURBS对
工具
创建点 :创建单独的点。 创建偏移点 :根据一个偏移量创建一个点。 创建曲线点 :创建从属曲线上的点。 创建曲线-曲线点 :创建一个从属于“曲线曲线”的相交点。 创建曲面点 :创建从属于曲面上的点。 创建曲面-曲线点 :创建从属于“曲面-曲 线”的相交点。
② 创建曲线的工具
创建CV曲线 :创建一条独立的CV曲线子对 象。
创建点曲线 :创建一条独立点曲线子对象。 创建拟合曲线 :创建一条从属的拟合曲线。 创建变换曲线 :创建一条从属的变换曲线。 创建混合曲线 :创建一条从属的混合曲线。 创建偏移曲线 :创建一条从属的偏移曲线。 创建镜像曲线 :创建一条从属的镜像曲线。 创建切角曲线 :创建一条从属的切角曲线。 创建圆角曲线 :创建一条从属的圆角曲线。 创建曲面-曲面相交曲线 :创建一条从属于 “曲面-曲面”的相交曲线。 创建U向等参曲线 :创建一条从属的U向等 参曲线。
116
象的所有工具,主要分为3个功能区,分别是“点”功 能区、“曲线”功能区和“曲面”功能区。
图3-399
图3-400
4.创建点/曲线/曲面卷展栏
“创建点”、“创建曲线”和“创建曲面” 卷展栏中的工具与“NURBS工具箱”中的工具相 对应,主要用来创建点、曲线和曲面对象,如图 3-401、图3-402和图3-403所示。
中文版3ds Max 2012实用教程
3.曲面/曲线近似卷展栏
“曲面近似”卷展栏下的参数主要用于控制 视图和渲染器的曲面细分,可以根据不同的需要 来选择“高”、“中”、“低”3种不同的细分预 设,如图3-399所示;“曲线近似”卷展栏与“曲 面近似”卷展栏相似,主要用于控制曲线的步数及 曲线的细分级别,如图3-400所示。
NT 二维扫描引擎 NT 2D Scan Engine 用户命令配置手册说明书

NT二维扫描引擎NT2D Scan Engine用户命令配置手册User’s Guide版本信息目录一、概述 (1)配置说明 (1)串口命令格式 (1)应答格式 (2)二、启动和停止扫码命令 (3)启动扫码 (3)停止扫码 (3)三、查询参数命令 (3)查询参数命令格式 (3)示例 (3)四、设置参数命令 (4)设置参数命令格式 (4)示例 (4)五、数据输出格式设置 (5)数据格式化设置格式 (5)示例 (5)六、查询参数命令常用列表 (6)七、设置参数命令列表 (6)系统设置 (6)通讯设置 (7)外设设置 (9)工作方式设置 (12)输出格式设置 (14)码制设置 (16)附表 (18)ASCII码表 (18)Code ID表 (22)一、概述配置说明:配置扫描引擎可以通过扫配置条码方式来配置,还可以通过串口发送命令字符串来配置,支持虚拟串口和物理串口两种串口连接。
本手册主要介绍通过串口发送命令字符串方式来配置扫描引擎。
串口缺省配置:9600bps,8数据位+1停止位,无校验位注:发送命令时,请先将字符串转换成对应的ASCII码。
串口命令格式:根据命令类型的不同,有两种命令格式。
一种是设置和查询参数命令的格式:命令类型参数项数值进制参数数值存储指示<SYN>?<CR>H/D./!一种是其他命令的格式:命令类型存储指示<SYN>?<CR>!格式字段分别说明如下:命令类型:其中的问号“?”根据不同的命令类型替换,例如:设置参数命令类型:<SYN>M<CR>(ASCII:0x16,0x4D,0x0D)查询参数命令类型:<SYN>Q<CR>(ASCII:0x16,0x51,0x0D)支持的命令类型如下表:设置参数<SYN>M<CR>查询参数<SYN>Q<CR>启动扫码<SYN>T<CR>停止扫码<SYN>U<CR>恢复出厂<SYN>F<CR>查询版本<SYN>V<CR>参数项:每个参数由4个ASCII字符组成,具体参数请参考后续章节。
TurboNest 2012 Quick Start Guide
商标 海宝和 TurboNest 均为 Hypertherm, Inc. 的商标,可能已在美国和/或其他国家/地区注册。 Microsoft、Windows 和 Internet Explorer 是 Microsoft 公司在美国和/或其它国家的注册商 标。Adobe 和 Adobe Reader 是 Adobe Systems 公司在美国和/或其它国家/地区的注册商 标或商标。HASP 是 Aladdin Knowledge Systems Ltd. 在美国和/或其他国家/地区的注册商 标。
1
TurboNest 安装指南
®
安装和设置
系统要求
软件
Windows® XP(带有 Service Pack 3 或更高版本)、Windows Vista(SP2 或更高版 本)、Windows 7 (SP1) 或更高版本
Microsoft Internet Explorer®6.0 或更高版本 Microsoft® Excel*
* 为编辑 TurboNest 设定电子表格 (.xls),推荐使用 Microsoft Excel 2000 或更高版本。如 果 Microsoft Excel 不可用,则可使用类似的电子表格应用程序。
安装 TurboNest
重要说明: • • 在安装 TurboNest 之前,请不要将 HASP 加狗 ( ) 插入到计算机之中。
网络授权
如果您购买了网络授权,则需要将一台计算机指定为网络授权服务器。网络许可证服务器将使用 HASP 加密狗来管理所有 TurboNest 客户端的许可证分配工作。 请注意,并不需要在网络许可证服务器上安装 TurboNest。
设置网络授权服务器
若要在网络许可证服务器上安装 TurboNest,只需在该计算机上安装 TurboNest 并将 HASP 加 密狗插接到计算机的 USB 端口上。这时,您的网络授权即已作好使用准备。 如果不打算在网络许可证服务器上安装 TurboNest,则应在该计算机上安装并运行独立的 License Manager(许可证管理器)实用工具。 要安装“许可证管理器“,请: 1 2 3 4 5 关闭所有程序。 将标有 TurboNest 的光盘插入网络授权服务器的光盘驱动器中。 浏览至 D:\Utilities(将 D 替换为合适的光盘驱动器盘符)。 双击 LicenseMgrSetup.exe。 按照屏幕上的要求完成安装。
SCOM 2012 系统建置手册

Step by step installation of SCOM 2012Pre-Install Preparation1.Ensure that all minimum requirements are met for the role(s) you areinstalling. The list of requirements for each role can be found here. 2.Ensure that the account being used to run your Management Serverservices is a member of the Local Administrators group on each ofyour Management Server.3.Ensure that any machine that is going to run the Operations Consolehas the MS Report Viewer installed, which can be found here.4.Ensure that the DW Write account for the environment you areinstalling is a local Administrator on the server hosting the SSRSReporting installation that will be used for SCOM.Install the First Agent Management ServerLog on to the server by using an account that has local administrative credentials.1.On the Operations Manager installation media, run Setup.exe, andthen on the splash screen click Install.2.On the Getting Started, Select features to install page, select theManagement server feature, and then click Next.3.On the Getting Started, Select installation location page, accept thedefault value of C:\Program Files\System Center 2012\Operations Manager. Or, type a new location or browse to one, and then clickNext.4.On the Prerequisites page, review and resolve any warnings or errors,and then click Verify Prerequisites Again to recheck the system.5.If the Prerequisites checker does not return any warnings or errors,the Prerequisites, Proceed with Setup page appears. Click Next.6.On the Configuration, Specify an installation option page, selectCreate the first Management server in a new management group, type the name for the management group, and then click Next.7.On the Configuration, Please read the license terms page, reviewthe Microsoft Software License Terms, select I have read,understood and agree with the license terms, and then click Next.8.When the Configuration, Configure the operational database pageopens, in the Server name and instance name box, type the name of the server and the name of the SQL Server instance for the database server that will host the operational database.9.After you type the correct value for the SQL Server database servername, click the SQL Server port box so that Setup will attempt to validate the values you typed for the SQL Server name and for the port number. If validation fails, ensure the SQL instance name you typed in is correct, and that you have permissions to read from the Master database and create new databases on the specified SQL instance, and try again.10.In the Database name, Database size (MB), Data file folder, andLog file folder boxes, accept the default values, and click Next. 11.When the Configuration, Configure the data warehouse databasepage opens, in the Server name and instance name box, type the server name and the name of the instance of SQL Server for thedatabase server that will host the data warehouse database.12.Because this is the first management server installation, accept thedefault value of Create a new data warehouse database.13.In the Database name, Database size (MB), Data file folder, andLog file folder boxes, accept the default values, and click Next. 14.On the Configuration, Configure Operations Manager accountspage, ensure that the Domain Account option is selected for each of the Management server action account, the System CenterConfiguration service and System Center Data Access serviceaccount, the Data Reader account, and the Data Writer account rows. Enter in the appropriate usernames for each row, with allpasswords. Click Next when finished.15.On the Configuration, Help improve System Center 2012 –Operations Manager page, select Yes for both options, and then click Next.16.Review the options on the Configuration, Installation Summarypage, and then click Install. Setup continues.17.When Setup is finished, the Setup is complete page appears. ClickClose.BeginningsThe following step-by-step walkthrough, starts from a newly built Microsoft Windows 2008R2 with SP1 Enterprise member server. We already have a fully working SQL Server 2008 R2 instance on a different member server.Database requirements:· SQL Collation: IMPORTANT - install SCOM 2012 on SQL withthe SQL_Latin1_General_CP1_CI_AS collation!·SQL Server 2008 with SP1/2/3, 2008R2, or 2008 R2 SP1 - Standard or Enterprise editions (no support for Express editions - it will not work, trust me, I’ve tried it!)· SQL Server Agent service must be started, and the startup type must be set to automatic· The db_owner role for the operational database must be a domain account· SQL Server Full Text Search is required· SQL Services Reporting Services (for Operations Manager Reporting)Note: If you don’t yet have an SQL Server 2008 R2 instance, a standard Next Next Next type install with Full Text Search, will suffice for the following demo/pilot.WalkthroughPart 1 - Server PreparationLogged in as a domain user with local administrator permissions (using domain administrator here which is not best practice)Add Features Wizard: Install the .NET Framework 3.5.1 feature from Server Manager > Features > Add Features:Accept to add the additional Required Role Services and Next > Next >:Select the role services to install for Web Server (IIS): Add the following IIS role services and Next >:· IIS6 Metabase Compatability· (and accept Add Required Role Services which includes the required - Default Document, ISAPI Filters, and ISAPI Extensions)· Windows Authentication· Static Content· Directory Browsing· HTTP Errors· HTTP Logging· Request Monitor· Static Content Compression· IIS Management Console· CGIConfirm Installation Selections: and Install:Download and install Microsoft .NET Framework 4 (Web Installer): dotNetFx40_Full_setup.exeInternet Information Services (IIS) Manager: From IIS Manager > Select the Web Server object > ISAPI and CGI Restrictions icon> and make sure that v4 is Allowed for 32 and 64 bit:Download and install the Report Viewer controls which are part of the Microsoft Report Viewer 2010 Redistributable Package: ReportViewer.exe(Optional) Turn off Windows Firewall:Mount the SQL Server 2008 R2 DVD/ISO:en_sql_server_2008_r2_enterprise_x86_x64_ia64_dvd_520517.isoAnd run through the ‘New installation or add features to an existing installation’ wizard to install ‘Reporting Services’:Note: We use a remote database for the operational database, and data warehouse database; installing Reporting Services here serves to populate the SQL Server instance field when on the ‘S QL Server instance for reporting services step’ of the SCOM2012 installation (see here for more info.) The SSRS instance needs to be a separate instance to SQL instance used by SCOM.At this stage it would be worth updating the server with the latest Microsoft and Windows patches.Part 2 - SCOM 2012 InstallInsert the System Center 2012 Operations Manager DVD/ISO and run SETUP.EXE (if autorun disabled):en_system_center_2012_operations_manager_x86_x64_dvd_804695.isoThe Microsoft System Center 2012 - Operations Manager setup screen appears:Links for reference:Release NotesInstallation GuidanceSupported ConfigurationsProduct DocumentationOperations Manager CommunityClick the Install button:Select features to install (here we’re going for a complete install) and Next >:Select installation location and Next >:Verify Prerequisites and if okay then Next >:Specify whether this is going to be the first Management server or an additional one (here we are creating a first one, so we need to provide a Management group name) and Next >:Accept the license terms and Next >:Configure the operational database - provide name and instance name of the SQL server to be used, configure further as required, and Next >:Configure the data warehouse database as required and Next >:SQL Server instance for reporting services - since we installed SSRS locally, this will pick up the local instance, Next >:Specify a web site for use with the Web console - use ‘Default Web Site’ or select as required, Next >:Select an authentication mode for use with the Web console, Next >:Configure Operations Manage accounts (for the demo using the domain administrator account which is not best practice - see Operations Manager Security Guide), Next >:Customer Experience Improvement and other stuff, Next> :Microsoft Update setting, Next >:Installation Summary, Install:The End!Note: In hindsight; for a demo you could probably get away with a local installation SQL Standard or Enterprise on the SCOM Server, with an additional instance for Reporting Services. Apologies I have no time to verify this.。
Autodesk Navisworks Freedom 2012 用户手册说明书

Autodesk Navisworks Freedom2012用户手册2011 年 4 月©2011 Autodesk, Inc. All Rights Reserved. Except as otherwise permitted by Autodesk, Inc., this publication, or parts thereof, may not be reproduced in any form, by any method, for any purpose.Certain materials included in this publication are reprinted with the permission of the copyright holder.TrademarksThe following are registered trademarks or trademarks of Autodesk, Inc., and/or its subsidiaries and/or affiliates in the USA and other countries: 3DEC (design/logo), 3December, , 3ds Max, Algor, Alias, Alias (swirl design/logo), AliasStudio, Alias|Wavefront (design/logo), ATC, AUGI, AutoCAD, AutoCAD Learning Assistance, AutoCAD LT, AutoCAD Simulator, AutoCAD SQL Extension, AutoCAD SQL Interface, Autodesk, Autodesk Envision, Autodesk Intent, Autodesk Inventor, Autodesk Map, Autodesk MapGuide, Autodesk Streamline, AutoLISP, AutoSnap, AutoSketch, AutoTrack, Backburner, Backdraft, Built with ObjectARX (logo), Burn, Buzzsaw, CAiCE, Civil 3D, Cleaner, Cleaner Central, ClearScale, Colour Warper, Combustion, Communication Specification, Constructware, Content Explorer, Dancing Baby (image), DesignCenter, Design Doctor, Designer's Toolkit, DesignKids, DesignProf, DesignServer, DesignStudio, Design Web Format, Discreet, DWF, DWG, DWG (logo), DWG Extreme, DWG TrueConvert, DWG TrueView, DXF, Ecotect, Exposure, Extending the Design Team, Face Robot, FBX, Fempro, Fire, Flame, Flare, Flint, FMDesktop, Freewheel, GDX Driver, Green Building Studio, Heads-up Design, Heidi, HumanIK, IDEA Server, i-drop, ImageModeler, iMOUT, Incinerator, Inferno, Inventor, Inventor LT, Kaydara, Kaydara (design/logo), Kynapse, Kynogon, LandXplorer, Lustre, MatchMover, Maya, Mechanical Desktop, Moldflow, Moonbox, MotionBuilder, Movimento, MPA, MPA (design/logo), Moldflow Plastics Advisers, MPI, Moldflow Plastics Insight, MPX, MPX (design/logo), Moldflow Plastics Xpert, Mudbox, Multi-Master Editing, Navisworks, ObjectARX, ObjectDBX, Open Reality, Opticore, Opticore Opus, Pipeplus, PolarSnap, PortfolioWall, Powered with Autodesk Technology, Productstream, ProjectPoint, ProMaterials, RasterDWG, RealDWG, Real-time Roto, Recognize, Render Queue, Retimer,Reveal, Revit, Showcase, ShowMotion, SketchBook, Smoke, Softimage, Softimage|XSI (design/logo), Sparks, SteeringWheels, Stitcher, Stone, StudioTools, ToolClip, Topobase, Toxik, TrustedDWG, ViewCube, Visual, Visual LISP, Volo, Vtour, Wire, Wiretap, WiretapCentral, XSI, and XSI (design/logo).LightWorks, the LightWorks logo, LWA and LWA-Enabled are registered trademarks of LightWork Design Ltd. The LWA-Enabled logo, Interactive Image Regeneration, IIR, A-Cubed, Feature-Following Anti-Aliasing and FFAA are all trademarks of LightWork Design Ltd. All other trademarks, images and logos remain the property of their respective owners. Copyright of LightWork Design Ltd. 1990-2007, 2008.This software is based in part on the work of the Independent JPEG Group.DisclaimerTHIS PUBLICATION AND THE INFORMATION CONTAINED HEREIN IS MADE AVAILABLE BY AUTODESK, INC. "AS IS." AUTODESK, INC. DISCLAIMS ALL WARRANTIES, EITHER EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO ANY IMPLIED WARRANTIES OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE REGARDING THESE MATERIALS.This User Guide was last updated on 11 April 2011.目录第 1 章欢迎使用 Autodesk Navisworks Freedom 2012 . . . . . . . . . . . 1此版本中有什么新功能? . . . . . . . . . . . . . . . . . . . . . . . . . . . 1如何获得帮助 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4使用信息中心查找信息 . . . . . . . . . . . . . . . . . . . . . . . . . 4信息中心概述 . . . . . . . . . . . . . . . . . . . . . . . . . . 4搜索信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5访问 Subscription Center . . . . . . . . . . . . . . . . . . . . 6使用通讯中心 . . . . . . . . . . . . . . . . . . . . . . . . . . 8保存和访问收藏夹主题 . . . . . . . . . . . . . . . . . . . . . . 9使用帮助系统 . . . . . . . . . . . . . . . . . . . . . . . . . . 10指定信息中心设置 . . . . . . . . . . . . . . . . . . . . . . . 15获取更多帮助 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17查看产品自述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17加入客户参与计划 . . . . . . . . . . . . . . . . . . . . . . . . . . 18第 2 章安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19单机版安装快速入门 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19准备安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19单机版安装的系统要求 . . . . . . . . . . . . . . . . . . . . . 19安装 Microsoft .Net Framework 4.0 . . . . . . . . . . . . . . 21了解管理权限要求 . . . . . . . . . . . . . . . . . . . . . . . 22iii避免在安装过程中丢失数据 . . . . . . . . . . . . . . . . . . . 22选择语言 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23安装多个产品或安装组合产品 . . . . . . . . . . . . . . . . . 24安装并运行 Autodesk Navisworks Freedom 2012 . . . . . . . . . . 25安装 Autodesk Navisworks . . . . . . . . . . . . . . . . . . 25启动 Autodesk Navisworks . . . . . . . . . . . . . . . . . . 27如何使用另一种语言启动 Autodesk Navisworks . . . . . . . . 27修复 Autodesk Navisworks Freedom 2012 . . . . . . . . . . 28卸载 Autodesk Navisworks Freedom 2012 . . . . . . . . . . 29安装疑难解答 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30基本安装问题 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30如何检查图形卡驱动程序以查看是否需要更新? . . . . . . . . 30如何将许可从单机许可切换到网络许可或者从网络许可切换到单机许可? . . . . . . . . . . . . . . . . . . . . . . . . . 31如果执行典型安装,将安装哪些功能? . . . . . . . . . . . . . 31为什么要指定项目文件夹和站点文件夹? . . . . . . . . . . . . 31如何基于站点和项目共享 Autodesk Navisworks 设置? . . . . 32什么时候应该重新安装产品而不是修复产品? . . . . . . . . . 33卸载软件时,哪些文件会留在系统中? . . . . . . . . . . . . . 33卸载和维护问题 . . . . . . . . . . . . . . . . . . . . . . . . . . . 33什么时候应该重新安装产品而不进行修复? . . . . . . . . . . 34卸载软件时,哪些文件会留在系统中? . . . . . . . . . . . . . 34第 3 章快速入门 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35启动和退出 Autodesk Navisworks . . . . . . . . . . . . . . . . . . . . . 35用户界面 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 Autodesk Navisworks 界面的组成部分 . . . . . . . . . . . . . . . . 36应用程序按钮和菜单 . . . . . . . . . . . . . . . . . . . . . . 37快速访问工具栏 . . . . . . . . . . . . . . . . . . . . . . . . 40功能区 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42工具提示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48按键提示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48导航工具 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49经典用户界面 . . . . . . . . . . . . . . . . . . . . . . . . . . 49场景视图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62可固定窗口 . . . . . . . . . . . . . . . . . . . . . . . . . . . 65状态栏 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69撤消/恢复命令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70Autodesk Navisworks 工作空间 . . . . . . . . . . . . . . . . . . . 70默认键盘快捷键 . . . . . . . . . . . . . . . . . . . . . . . . . . . 73 iv | 目录使用滚轮按钮导航 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Autodesk Navisworks 选项 . . . . . . . . . . . . . . . . . . . . . . . . 79位置选项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84显示单位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86搜索目录 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87小控件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88第 4 章使用文件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89使用文件读取器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89 NWD 文件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89DWF/DWFx 文件 . . . . . . . . . . . . . . . . . . . . . . . . . . 89管理文件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90打开文件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90创建文件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91二维文件和多页文件 . . . . . . . . . . . . . . . . . . . . . . . . . 92“项目浏览器”窗口 . . . . . . . . . . . . . . . . . . . . . . 92第 5 章浏览模型 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97导航场景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97三维工作空间中的方向 . . . . . . . . . . . . . . . . . . . . . . . . 98特定于产品的导航工具 . . . . . . . . . . . . . . . . . . . . . . . . 99导航栏工具 . . . . . . . . . . . . . . . . . . . . . . . . . . 100SteeringWheels 工具 . . . . . . . . . . . . . . . . . . . . . 105经典导航模式和工具 . . . . . . . . . . . . . . . . . . . . . 121 ViewCube . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130ViewCube 概述 . . . . . . . . . . . . . . . . . . . . . . . . 130ViewCube 菜单 . . . . . . . . . . . . . . . . . . . . . . . . 133通过 ViewCube 重新设置模型视图的方向 . . . . . . . . . . . 134设置视图投影模式 . . . . . . . . . . . . . . . . . . . . . . . 138主视图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138使用 ViewCube 观察各个对象 . . . . . . . . . . . . . . . . 139导航栏 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139导航栏概述 . . . . . . . . . . . . . . . . . . . . . . . . . . 140重新定位和重新定向导航栏 . . . . . . . . . . . . . . . . . . 141控制导航栏上导航工具的显示 . . . . . . . . . . . . . . . . . 142 SteeringWheels . . . . . . . . . . . . . . . . . . . . . . . . . . . 143SteeringWheels 概述 . . . . . . . . . . . . . . . . . . . . . 143“控制盘”菜单 . . . . . . . . . . . . . . . . . . . . . . . . 147查看对象控制盘 . . . . . . . . . . . . . . . . . . . . . . . . 148巡视建筑控制盘 . . . . . . . . . . . . . . . . . . . . . . . . 149目录 | v全导航控制盘 . . . . . . . . . . . . . . . . . . . . . . . . . 151二维导航控制盘 . . . . . . . . . . . . . . . . . . . . . . . . 153 3Dconnexion 三维鼠标 . . . . . . . . . . . . . . . . . . . . . . . 153相机 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155设置相机投影 . . . . . . . . . . . . . . . . . . . . . . . . . 156控制视野 . . . . . . . . . . . . . . . . . . . . . . . . . . . 156确定相机的位置并使相机聚焦 . . . . . . . . . . . . . . . . . 157导航辅助工具 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161平视显示仪 . . . . . . . . . . . . . . . . . . . . . . . . . . 161参考视图 . . . . . . . . . . . . . . . . . . . . . . . . . . . 162焦点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163保留 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164控制导航的真实效果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164重力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165蹲伏 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165碰撞 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166第三人视图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167第 6 章控制模型外观和渲染质量 . . . . . . . . . . . . . . . . . . . . . 169控制模型外观 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169选择渲染模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169完全渲染 . . . . . . . . . . . . . . . . . . . . . . . . . . . 170着色 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170线框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170隐藏线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171添加照明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171全光源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171场景光源 . . . . . . . . . . . . . . . . . . . . . . . . . . . 172顶光源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172无光源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173选择背景效果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174调整图元的显示 . . . . . . . . . . . . . . . . . . . . . . . . . . . 176曲面 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177捕捉点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177文字 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178控制渲染质量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178使用消隐 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178使对象成为强制项目 . . . . . . . . . . . . . . . . . . . . . 180控制对象的渲染 . . . . . . . . . . . . . . . . . . . . . . . . . . . 181vi | 目录在导航过程中调整场景渲染 . . . . . . . . . . . . . . . . . . 181加速显示性能 . . . . . . . . . . . . . . . . . . . . . . . . . 183调整 Presenter 材质 . . . . . . . . . . . . . . . . . . . . . . . . . 184立体渲染 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184第 7 章检查模型 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187选择对象 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187交互式几何图形选择 . . . . . . . . . . . . . . . . . . . . . . . . 187“选择树”窗口 . . . . . . . . . . . . . . . . . . . . . . . . 187选择工具 . . . . . . . . . . . . . . . . . . . . . . . . . . . 190选择命令 . . . . . . . . . . . . . . . . . . . . . . . . . . . 192设置高亮显示方法 . . . . . . . . . . . . . . . . . . . . . . . . . . 194隐藏对象 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195查找对象 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197快速查找 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197查找包含选定对象的所有图纸和模型 . . . . . . . . . . . . . . . . . . . 197“在其他图纸和模型中查找项目”窗口 . . . . . . . . . . . . . . . 198使用对象集 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200对象特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201“特性”窗口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201重置对象属性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203重置为原始值 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203测量工具 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204“测量工具”窗口 . . . . . . . . . . . . . . . . . . . . . . . . . . 204测量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205注释 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212查看注释 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212“注释”窗口 . . . . . . . . . . . . . . . . . . . . . . . . . 212查看红线批注和标记 . . . . . . . . . . . . . . . . . . . . . 214链接 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215链接类别 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215显示链接 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215自定义链接 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217查找和跟踪链接 . . . . . . . . . . . . . . . . . . . . . . . . . . . 219重置链接 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220快捷特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220第 8 章使用视点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223修改视点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223“保存的视点”窗口 . . . . . . . . . . . . . . . . . . . . . . . . 223重新调用视点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226目录 | vii组织视点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226编辑视点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227第 9 章播放动画 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231播放动画和脚本 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231第 10 章在一个团队中工作 . . . . . . . . . . . . . . . . . . . . . . . . . 233协作面板 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233协作任务 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233第 11 章共享数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237打印 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237打印预览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237打印设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237打印当前视点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238第 12 章TimeLiner 回放 . . . . . . . . . . . . . . . . . . . . . . . . . . 239 TimeLiner 工具概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . 239“TimeLiner 回放”窗口 . . . . . . . . . . . . . . . . . . . . . . 239“模拟”选项卡 . . . . . . . . . . . . . . . . . . . . . . . . 239播放模拟 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242“模拟设置”对话框 . . . . . . . . . . . . . . . . . . . . . . . . 242“覆盖文本”对话框 . . . . . . . . . . . . . . . . . . . . . . . . 247第 13 章参照 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251“背景设置”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251“碰撞”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252“默认碰撞”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253“编辑视点”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254“文件选项”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255“消隐”选项卡 . . . . . . . . . . . . . . . . . . . . . . . . . . . 256“方向”选项卡 . . . . . . . . . . . . . . . . . . . . . . . . . . . 257“速度”选项卡 . . . . . . . . . . . . . . . . . . . . . . . . . . . 258“头光源”选项卡 . . . . . . . . . . . . . . . . . . . . . . . . . . 258“场景光源”选项卡 . . . . . . . . . . . . . . . . . . . . . . . . 258“信息中心设置”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . 259“常规”节点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259“通讯中心”节点 . . . . . . . . . . . . . . . . . . . . . . . . . . 259“Autodesk 频道”页面 . . . . . . . . . . . . . . . . . . . . 260 viii | 目录“气泡式通知”页面 . . . . . . . . . . . . . . . . . . . . . 260“RSS 提要”页面 . . . . . . . . . . . . . . . . . . . . . . . 260“选项编辑器”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . 261“常规”节点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261“撤消”页面 . . . . . . . . . . . . . . . . . . . . . . . . . 261“位置”页面 . . . . . . . . . . . . . . . . . . . . . . . . . 262“界面”节点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262“显示单位”页面 . . . . . . . . . . . . . . . . . . . . . . . 262“选择”页面 . . . . . . . . . . . . . . . . . . . . . . . . . 263“测量”页面 . . . . . . . . . . . . . . . . . . . . . . . . . 264“捕捉”页面 . . . . . . . . . . . . . . . . . . . . . . . . . 264“视点默认值”页面 . . . . . . . . . . . . . . . . . . . . . 265“链接”页面 . . . . . . . . . . . . . . . . . . . . . . . . . 265“快捷特性”页面 . . . . . . . . . . . . . . . . . . . . . . . 267“开发人员”页面 . . . . . . . . . . . . . . . . . . . . . . . 267“显示”页面 . . . . . . . . . . . . . . . . . . . . . . . . . 2683Dconnexion 页面 . . . . . . . . . . . . . . . . . . . . . . 272“导航栏”页面 . . . . . . . . . . . . . . . . . . . . . . . . 272“ViewCube”页面 . . . . . . . . . . . . . . . . . . . . . . 273SteeringWheels . . . . . . . . . . . . . . . . . . . . . . . . 274“用户界面”页面 . . . . . . . . . . . . . . . . . . . . . . . 276“模型”节点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277“性能”页面 . . . . . . . . . . . . . . . . . . . . . . . . . 277“NWD”页面 . . . . . . . . . . . . . . . . . . . . . . . . 279“NWC”页面 . . . . . . . . . . . . . . . . . . . . . . . . 279第 14 章词汇表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281索引 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285目录 | ixx欢迎使用AutodeskNavisworks Freedom 2012Autodesk Navisworks Freedom 2012软件是免费的 DWF ™文件查看器。
SolveigMM HyperCam SDK 开发者参考手册说明书
SolveigMM HyperCam SDK Developer Reference ManualSDK Version: 1.0 EvaluationFirst edition: August 11, 2010Date modified: October 11, 2012Note:The documentation of evaluation version is technically restrictedSolveig Multimedia,3 Razvitiya ave., 634055,Tomsk, Russian FederationTable of contentsSolveigMM HyperCam SDK Notices (3)Releases Notes (4)Product Description (4)Components (4)Samples (4)System Requirements (4)SolveigMM HyperCam SDK User Guide (6)Installing SDK (6)Uninstalling SDK (6)SDK Folder Structure (6)SDK Sample Applications (7)SolveigMM HyperCam SDK Reference Manual (10)SolveigMM Overlay Hook (10)SolveigMM HyperCam 3 (10)SolveigMM HyperCam SDK NoticesSDK Version: 1.0 EvaluationFirst edition: August 11, 2010Date modified: October 11, 2012More information can be found at:/For Technical Support, contact the Solveig Multimedia Technical Support Team:********************* Forpurchasingandlicensinginformation,contacttheSalesDepartment:******************For more information, contact Solveig Multimedia Tel: +7 382 2 701 424 ext. 2049;Solveig Multimedia provides this publication “as is” without warranty of any kind, either expressed or implied.This publication may contain technical inaccuracies or typographical errors. While every precaution has been taken in the preparation of this document, the publisher and author assume no responsibility for errors or omissions. Nor is any liability assumed for damages resulting from the use of the information contained herein. Changes are periodically made to the information herein; these changes will be incorporated in new editions of the publication. Solveig Multimedia may make improvements and/ or changes in the product(s) and/or the program(s) described in this publication at any time.Other company, product, trademarks, and service names are trademarks or service marks of other companies or corporations.Releases NotesProduct DescriptionThe SolveigMM HyperCam SDK is a software development kit to enable programmers to develop digital video applications using Solveig Multimedia components.ComponentsSolveigMM HyperCam SDK includes the following components:SolveigMM Overlay Hook(SMM_OverlayHook.dll)A dynamic-link library to implement the technology of DirectDraw ® overlay capture.SolveigMM HyperCam 3 (SMM_HyperCam.exe)A SolveigMM HyperCam 3 executable registered to be used as an OLE server.SolveigMM Audio Mixer (SMM_AudioMixer.ax)A DirectShow filter intended for mixing multiple input audio streams to single output stream.SolveigMM Resampler (SMM_Resample.dll)A dynamic-link library providing simple methods to convert audio stream’s parameters (number of channels, sample rate and sample size)SolveigMM Screen Capture Filter (SMM_ScrCapture.ax)A DirectShow filter intended for capturing the specified on-screen region.SolveigMM Time Shifter (SMM_TimeShifter.ax)A DirectShow filter that allows shifting audio against videoSolveigMM System Audio Capture Filter (SMM_WASAPISource.ax)A DirectShow filter intended for capturing system audio in Windows Vista and higher.SolveigMM File Writer (SMM_FileWriter.ax)A DirectShow filter for writing AVI and MPEG audio files.SolveigMM ASF Multiplexer (SMM_ASFMuxer.ax)A DirectShow filter for the video and audio streams multiplexing into Microsoft Advanced Streaming Format.SolveigMM WAV Multiplexer (SMM_WavMux.ax)A DirectShow filter for multiplexing audio streams into WAV files.SamplesSMM_OverlayHookThis sample demonstrates using of SolveigMM Overlay Hook dynamic-link library. It shows how to capture application screen activity which uses DirectDraw ® overlay with given frame rate. Derived images are displayed in OverlayHook window and optionally saved to BMP files.SMM_HyperCamOLEManagerThe sample demonstrates how to utilize the SolveigMM HyperCam 3 as an OLE-server. It shows the usage of a main properties and methods.System Requirements·CPU (Intel® Pentium II, Celeron, AMD® Athlon, Opteron etc.)·128 MB RAM.·Any VGA card.·Windows® 2000/XP/2003/Vista/7.·Microsoft® DirectX® 8.0 Runtime or higher.SolveigMM HyperCam SDK User GuideInstalling SDKTo install the SolveigMM HyperCam SDK:1. Run the SDK setup. To run, double click the executable file from the SDK setup package.2. The SolveigMM HyperCam SDK window will appear. Read the recommendations and warnings.Click Next.3. The Release Notes will appear. Click Next.4. The license agreement will appear. Read the agreement and if you accept the terms within,select the“Yes I agree with the terms of this license agreement” check box. Click Next.5. Select the destination folder in which you want to install the SDK. Click Next.6. Select the program group in which you want the SDK to be located. Click Next.7. To complete installation, follow the onscreen instructions. When setup has finished installing allof the necessary files on your computer, the appropriate message box with the text “SolveigMM HyperCam SDK has been successfully installed” will appear and the SDK is ready to use. Uninstalling SDKTo uninstall the SolveigMM Media Capture SDK1.Click Start→Programs→Solveig Multimedia→SolveigMM HyperCam SDK→Uninstall SDK.Follow the onscreen instructions to complete removal of the application.SDK Folder StructureAfter installing the SDK, the “SolveigMM HyperCam SDK” folder will appear in the destination folder specified during installation.Note:After installing the SolveigMM HyperCam SDK, the SDK Components(filters and DLLs) will be installed on your PC in the “Program Files\Common Files\Solveig Multimedia” (in addition toSolveigMM HyperCam SDK folder).The SDK folder has the following folders:Bin– contains the necessary binaries.Bin/release– contains the release versions of compiled samplesDoc- includes all SDK-related documentationInclude- includes headers to comprise interfaces and headersSamples – includes VisualStudio 2008 C++ Sample ApplicationsSDK Sample ApplicationsSMM_OverlayHookThis sample demonstrates using of SolveigMM Overlay Hook dynamic-link library. It shows how to capture application screen activity which uses DirectDraw ® overlay with given frame rate. Derived images are displayed in OverlayHook window and optionally saved to BMP files into bmps subfolder of OverlayHook folder. If overlay is not used the application displays the message about it. OverlayHook GUI is at the Figure 1.Figure 1 – The application GUILet us consider a simple example of the sample usage. It works if DirectDraw ® overlay is used for bitmap output. However Windows Media Player 12 (it is default version for Windows ® 7) does not use it and OverlayHook sample will not display any picture in this case. To grab such applications the another SolveigMM Media Capture SDK components should be used. They will be included in later versions of the SDK.The example is the following. Start OverlayHook. Open any video in Windows Media Player ®and start playing.Figure 2 – Movie in the Windows Media Player ® windowSet necessary frame rate in the frame rate field at the OverlayHook window (it's set to 30 at the fig. 3), set "Resize image window" option and click "Grab overlay" button. Video from the Windows Media Player ® window will appear at the sample image window. Check "Save result to bmp files" option. OverlayHook will start to save the contents of image fileld to the bmp files named 000000.bmp, 000001.bmp, 000002.bmp etc.Figure 3 – Image in the OverlayHook windowUncheck "Save result to bmp files" option. The image saving will be stopped. Click "Stop grab" button to stop capture and exit the sample.SMM_HyperCamOLEManagerThis sample demonstrates using of a SolveigMM HyperCam 3 as an OLE-Server. It shows how to read and correctly change the supported settings. For the correct working of a sample the SolveigMM HyperCam 3 executable should be registered as an OLE-server. By default it is done while the installing. To manually register the SolveigMM HyperCam you should run it with the command “-regserver”, to manually unregister it, you should run it with the command “-unregserver”. In Windows Vista and higher you should run the SolveigMM HyperCam with the parameters above As an Administrator. The user interface is shown at Figure 4.Figure 4 – SolveigMM HyperCam OLE Manager User interface.SolveigMM HyperCam SDK Reference ManualSolveigMM Overlay HookSolveigMM Overlay Hook dynamic-link library is a software-only solution for capture of application screen activity which uses DirectDraw ® overlay with given frame rate. The engine is implemented as a simple dynamic-link library and can be used by any Windows® application.The library contains the following functions.Functions in VTable orderDescriptionStart the engine for capture overlay Stop the engine which captures overlayRetrieve a picture from overlaySpecify the capture frame rate Bring the capture engine onlineMake the capture engine offline Check if overlay is usedThese functions names and their detailed descriptions are available in the full SDK version.SolveigMM HyperCam 3The SolveigMM HyperCam 3 is an OLE server to be controlled by a client application. It exposes a number of methods and properties.The SolveigMM HyperCam server exposes some properties and methods. The detailed descriptions are available in the full SDK version.ExecutableSMM_OverlayHook.dllExecutable SMM_HyperCam.exe。
和rew Solutions 技术指南说明书

Technical PublicationRelated Support and Learning Opportunities Offered by the Andrew InstituteThe insights and expertise contained in this manual represent just one small part of Andrew Solutions global learning initiative. Few industries are evolving as quickly as wireless communications. Every technological innovation impacts what happens in the field. Our customers look to the Andrew Institute to make sure their technicians and installers are well trained, well-prepared, and well-educated to take advantage of opportunities as they evolve. Here are a few groups within Andrew Solutions that are working to make it happen: Field Engineering Services (FES)Support services, such as our Field Engineering Services (FES) Group gives Andrew Solutions’ customers access to technical support where and when it is needed the most — in the field. The FES team is staffed by an expert team of technicians who, in turn, are supported by some of the brightest and most experienced product line managers. With all of this knowledge and support FES’ Andrew Institute offers our customers access to hands-on, specialized training classes.Section 1: Tools Required / System Overview..................................................................................01Section 2: Trunk Fiber Feeder..........................................................................................................02Section 3: General Specifications / Fiber Jumpers...............................................................................03Section 5: LC Connection Considerations...........................................................................................04Section 6: Cleaning ..........................................................................................................................05Section 4: Fiber access..................................................................................................................06Section 7: BBU Breakout / Hanger- Grommet.............................................................................................07Section 8: Estimating Trunk Length / Excess Cable handling ..............................................................08Section 9: Installation Check List and Fiber Troubleshooting . (09)Customer Service CenterUnited States and Mexico 1-800-255-1479 or 1-888-235-5732 International: +1-779-435-8579For the most current, up-to-date information on all our products and product information please visit our eCatalog section at .Installation Guidelines - – HELIAX ® FiberFeed Solutions for RRH SystemsFiber/Copper Cables: RFF-16SM-812-APE │RFF-16SM-810-APE │ RFF-16SM-808-APETools Required• Fiber Optic Continuity Tester• Fiber Optic Cleaning Kit• Electrician Scissors• Shear Cutter – small• Long Nose Pliers• Flat Head Screwdriver – jewelry• Flat Head Screwdriver – large• Torx key set (Ti5)• Voltmeter• Safety Glasses• Safety Gloves• Knife – blunt end preferred• Wire Brush or Low Grit Emery Cloth• 1/2" Nut driver• Two adjustable wrenches (or M25 & M28 wrenches) System OverviewHybrid Configuration• Up to 4 RRUs per sector, 12 RRUs site max• One to three vertical hybrid cables• Main Hybrid Cable is Terminated at both Ends • Armored jumpers from Junction Box to RRU• Fully Armored Cables from BBU to RRU• Lockable Junction Boxes• Quantity sixteen Singlemode Fiber• 24 Fiber BBU patch panel kit• Install with standard tools and simple fiber tester• In general this cable will handle similarly to 7/8” coaxial cable, and similar installation techniques apply. All cables are individually serialized, be sure to write down the cable serial number for future reference.• The terminated fiber ends (the broken out fibers plus connectors) however are fragile, and these must be protected during the installation process.• Leave the protective tube and sock around the fiber tails and connectors in place during hoisting andsecuring the cable. Remove this only just prior to making the final connections to the Junction box.• DO NOT BEND THE FIBER ENDS (in the orange furcation tubes) TIGHTER THAN 1.18" (30mm) BEND RADIUS ELSE THERE IS A RISK OF BREAKING THE GLASS FIBERS.• Be sure that the lace up ends and fiber connectors are not damaged by attachment of a hoisting grip or during the hoisting process. Attach a hoisting grip on the jacketed cable no less than 6" below the fiber breakout point. If a hoisting grip is not easily attached, use a simple line attached below the fiber break-out point (i.e. at the cable outer jacket). Prevent the fiber tails (in protective tube) at the cable end from undue movement during hoisting by securing the protective tube (with outer sock) to the hoisting line.• During hoisting ensure that there is a free path and that the cable, and especially the fiber ends, will not be snagged on tower members or other obstacles.• Installation temperature range is -22F to 158F (-30C to +70C).• Minimum cable bend radii are 22.2” (565mm) loaded (with tension on the cable) and 11.1” (280mm) unloaded.• Maximum cable tensile load is 3560 N (800lb) short term (during installation) and 240lb (1070N) long term.• CommScope non Lace Up Grip recommended for Monopoleinstallations.•Maximum hanger spacing 3ft (0.9m).Trunk Fiber Feederconnector Cable leaderHoisting gripHoist line to next gripClevisHoisting RecommendationsReminder: Plan grip location by measuring distance (D) from Fiber Enclosure Box to tower support member.General SpecificationsCable Type RFF-16SM-812-APE RFF-16SM-810-APE RFF-16SM-808-APE Construction Type Armored Armored ArmoredApplication Remote radio head Remote radio head Remote radio headBrand Heliax® FiberFeed Heliax® FiberFeed Heliax® FiberFeedCenter Conductor Gauge 12 AWG 10 AWG 8 AWGConductors, quantity 8 8 8Corrosion Protection Water blocking tape Water blocking tape Water blocking tapeInner Shield (Tape) Material Corrugated aluminum Corrugated aluminum Corrugated aluminum Outer Shield (Tape) Material PE PE PERipcord Material Para-aramid synthetic fiber Para-aramid synthetic fiber Para-aramid synthetic fiber Strength Member Glass reinforced plastic rod Glass reinforced plastic rod Glass reinforced plastic rod Construction MaterialsFiber Type Solution Singlemode G.652.D fiber Singlemode G.652.D fiber Singlemode G.652.D fiber Total Fiber Quantity 16 16 16Armor Type Corrugated aluminum Corrugated aluminum Corrugated aluminum Fiber Type TeraSPEED® Singlemode fiber TeraSPEED® Singlemode fiber TeraSPEED® Singlemode fiber Fiber Type, quantity 16 16 16Fibers Per Subunit, quantity 2 2 4Jacket Color Black Black Black DimensionsCable Weight 516.0 kg/km | 347.0 lb/kft 750.0 kg/km | 510.0 lb/kft 1094.0 kg/km | 735.0 lb/kft Diameter Over Jacket 19.81 mm | 0.78 in 23.90 mm | 0.94 in 27.90 mm | 1.1 in Subunit, quantity 8 8 4Physical SpecificationsMinimum Bend Radius, loaded 396.2 mm | 15.6 in 477.5 mm | 18.8 in 558.8 mm | 22.0 in Minimum Bend Radius, unloaded 198.1 mm | 7.8 in 238.8 mm | 9.4 in 279 mm | 11.0 inTensile Load, long term, maximum 801 N | 180 lbf 801 N | 180 lbf 1068 N | 240 lbfTensile Load, short term, maximum 2669 N | 600 lbf 2669 N | 600 lbf 3559 N | 800 lbf Jumper Assemblies• In general this cable will handle similarly to a 3/8” coaxial cable.• The terminated fiber ends however are fragile and must be protected during installation. Leave the packaging around the fiber ends in place until ready to connect the jumper between junction box and RRU or BBU.• DO NOT BEND THE FIBER ENDS (in the orange furcation tubes) TIGHTER THAN 1.18" (30mm) BEND RADIUS ELSE THERE IS A RISK OF BREAKING THE GLASS FIBERS.• Attach the main cable securely to the structure or equipment using hangers and/or cable ties to prevent strain on connections from movement in wind or snow/ice conditions.• Ensure the LC fiber connectors are seated firmly in panel in junction box or in equipment.• All RRU ensure the weatherproof boots for both fiber and power connections and seated firmly in the radio frame. • Shrink tube of the jumper should be 1" (25.40mm) inside of the Junction box.• Installation temperature range is -22F to 158F (-30C to 70C).• Minimum cable bend radii are 10.3" (265mm) loaded (with tension on the cable) and 5.2" (130mm) unloaded.• Maximum cable tensile load is 350lb (1560N) short term (during installation) and 105lb (470N) long term.• Standard lengths available are 6 feet, 12 feet and 20 feet - others are available on request.• All jumpers are individually serialized, for immediate access to test results visit /webtrak/LC Connectors InstructionsInstall connectors into the adapter by aligning the latch on the connector with the slot on the adapter and gently push into place. An audible click is heard when the connector snaps into the adapter. If a high-loss condition exists, use the LC cleaning procedures and reinstall the connector.When doing rearrangements or reinsertions of LC connectors, use the LC cleaning procedures to clean all components and reinstall the connectors.LC Duplex ConnectorsEND 1 (RRU/BBU)END 2 (Junction box)Clean exposed connector ferrule by lightly moistening lint-free wipe with fiber optic cleaning solution (or >91% isopropyl alcohol), and by applying medium pressure, first wipe against wet area and then onto dry area to clean potential residue from end face. Clean connector ferrule inside adapter by inserting lightly moistened cleaning stick with fiber optic cleaning solution (or >91% isopropyl alcohol) inside the adapter until contact is made with connector on opposite end. Rotate cleaning stick with medium pressure in one circular motion as it is pulled away from the adapter. Repeat process using dry cleaning stick.Caution:Clean adapter by inserting adapter cleaning stick (or fiber adapter sleeve brush) moistened with fiber optic cleaning solution (or >91% isopropyl alcohol) inside the adapter and gently pull out with twisting motion. Repeat process with a dry cleaning stick.Caution: Do not try to clean adapter with a standard pipe cleaner. The sleeve inner diameter of LC adapters is too small. Do not try to clean the adapter with cleaning stick if a connector is mounted in one side. Discard cleaning sticks after each use.Clean Tip of FerruleDevice designed for cleaning the ferrule end faces of LC connectorsOpen guide cap, insert LC connector into guide, push the outer shell to start cleaning the LC connector interface, a "click" sound indicates end of a cleaning process, repeat, close cap immediately after use.Caution: Be careful not to slant LC connector while inserting into the Guide cap. Do not overly exert force during insertion as this may cause damage to both the connector and the cleaner.All in one cleanerGuideLC Connector Cap Part Number: FCCT - LRemove electrical tape from cap and protection tube Remove cap from protection tubeBreakout Procedure: Removal of Fiber Protection TubeRemove electrical tape from corrugated protection tube 1234567Access front section of the clear poly tube from the protection tube. While holding the clear tube, gently push the protection tube toward cable. Make sure protection tube is straight while pushing.Expose just enough clear tube outside the protection tube for access all optical connectors.Remove electrical tape from the clear poly tube.Push back poly tube to expose optical connectors. All Fiber bends minimum 1.18" (30mm) radius.**To reinstall protection kit reverse steps**Fiber to patch panelBBU Breakout 812 / 810Hanger - GrommetKit includes:Qty 10: SHK-78-3-P (hanger)Qty 30: RFFG-19-1 (grommet 812 cable) RFFG-24-1 (grommet 810 cable)*No grommet required for 808 cable• 1 Hanger required every 1m (3ft)Fiber to patch panelBBU Breakout 808Excess Cable HandlingProper Fiber Connections keeping sectors consistentDouble check all Electrical Terminals for proper torque, screw in all empty terminals Double check all Box compression fittings for proper torque (per installation bulletin)Proper grounding of both Boxes with 6 AWG (min) to 2 AWG (max) cablesDouble Check all outdoor RRU Connections (fiber, power and connectors) are properly seated Latch top and bottom of boxes – both latchedProperly support all jumpers to prevent strain on fiber during severe weatherCable serial numbers have been documented in the closeout paperwork and a copy has been left on-siteInstallation Check List• Clean First! Clean optical end face with appropriate all in one cleaner. Clean all connector end faces • Visually inspect end face for residual dirt and damage• Avoid migration of contaminations from one connector to another• Check continuity by using LED or lazer light source from one end face and look for light from other end to identify any broken fiber (Do not look directly at cable with lazer source)• Check end face again for cleanliness before attachment. If needed, clean again• Scan QR code to visit Webtrak online for fast, easy access to test data or download the cTrak app from/appsFiber Troubleshooting/andrewVisit our Web site or contact your local CommScope representative for more information © 2012 CommScope, Inc. All rights reserved.All trademarks identified by ® or ™ are registered trademarks or trademarks, respectively, of CommScope, Inc.This document is for planning purposes only and is not intended to modify or supplement any specifications or warranties relating to CommScope products or services.。
URHelper 帮助手册说明书
: Raymone Dong********************** :136****0408文档编号 [] nURHelper 帮助手册版本号: 1.2.11021修改日期: 2016-11-2Copyright © 2009-2016 by NONEAD Corporation. All rights reserved. Copyright ownership belongs to NONEAD Corporation, shall not be reproduced, copied, or used in other ways without permission. Otherwise NONEAD Corporation will have the right to pursue legal responsibilities.前言nURHelper.dll是由C#编写、基于Microsoft .Net Framework 4.0的优傲机器人控制类库。
其中包含了与优傲机器人的连接,获取优傲机器人数据及控制优傲机器人等功能。
通过使用本类库可以实现与多台优傲机器人连接,并操控优傲机器人。
1版本变更历史日期版本号描述作者2016-9-12 1.1.09121 Initial Version of Document Raymone Dong 2016-9-28 1.1.09281 Update&Change Raymone Dong 2016-10-17 1.1.10171 Add new function Raymone Dong 2016-10-21 1.2.10211 Release official version Raymone Dong 2016-10-28 1.2.10281 Bug verify Raymone Dong 2016-11-02 1.2.11021 Add new functin Raymone Dong2 版本变更内容日期版本号变更内容2016-11-02 1.2.11021 1.添加通过30003端口移动机器人TCP的功能2.添加通过30003端口移动机器人关节的功能3.修改n30003Entity.RUN_TIME的单位为秒(s)2016-10-28 1.2.10281 1.修改Ethernet连接下模拟输入/输出电流的单位转化问题2016-10-21 1.2.10211 1. 发布正式版本,添加硬件狗加密功能2016-10-17 1.1.10171 1. 修改Ethernet部分中的Connect方法,新增Ethernet连接方式2. 在Ethernet部分中新增GetEthernetConnectionID方法3. 修改错误信息列表,新增错误信息4. 限制UR机器人的连接数量上限为62016-9-28 1.1.09281 1. 修改部分Bug2. 修改文档2016-9-12 1.1.091211.修改部分Bug2.新增Ethernet功能模块目录1版本变更历史 (2)2 版本变更内容 (2)3 产品内容 (8)4 范围定义 (8)4.1 适用机器人范围 (8)4.2 类库包含功能模块 (8)5 功能模块介绍 (10)5.1 通用 (10)5.1.1 模块简述 (10)5.1.2 功能列表 (10)5.1.3 CreateUR (10)5.1.4 ClearUR (10)5.1.5 ClearAllUR (11)5.1.6 GetURList (11)5.1.7 URErrorMessage (11)5.1.8 ErrorMessage (12)5.2 Modbus模块 (12)5.2.1 模块简述 (12)5.2.2 功能列表 (12)5.2.3 Connect (13)5.2.4 Disconnect (13)5.2.5 IsConnected (14)5.2.6 GetData (14)5.2.7 GetInput (15)5.2.8 GetOutput (15)5.2.9 GetAnalogIn (16)5.2.10 GetAnalogOut (17)5.2.11 SetOutput (18)5.2.12 SetAnalogInType (18)5.2.13 SetAnalogOutType (19)5.2.14 SetAnalogOutValue (20)5.2.15 GetRegister (21)5.2.16 SetRegister (22)5.3 30003模块 (22)5.3.1 模块简述 (22)5.3.2 功能列表 (22)5.3.3 Connect (23)5.3.4 Disconnect (24)5.3.5 IsConnected (24)5.3.6 AnalysisData (24)5.3.7 GetData (25)5.3.8 SendProgram (25)5.3.9 Freedrive (26)5.3.10 TeachMode (26)5.3.11 Stop (27)5.3.12 MoveXPlus (27)5.3.13 MoveXReduce (28)5.3.14 MoveYPlus (29)5.3.15 MoveYReduce (30)5.3.16 MoveZPlus (31)5.3.17 MoveZReduce (32)5.3.18 MoveRXPlus (33)5.3.19 MoveRXReduce (34)5.3.20 MoveRYPlus (35)5.3.21 MoveRYReduce (36)5.3.22 MoveRZPlus (37)5.3.23 MoveRZReduce (38)5.3.24 MoveJ0Plus (39)5.3.25 MoveJ0Reduce (40)5.3.26 MoveJ1Plus (41)5.3.27 MoveJ1Reduce (42)5.3.28 MoveJ2Plus (43)5.3.29 MoveJ2Reduce (44)5.3.30 MoveJ3Plus (45)5.3.31 MoveJ3Reduce (46)5.3.32 MoveJ4Plus (47)5.3.33 MoveJ4Reduce (48)5.3.34 MoveJ5Plus (49)5.3.35 MoveJ5Reduce (50)5.4 Dashboard模块 (51)5.4.1 模块简介 (51)5.4.2 功能列表 (51)5.4.3 Connect (52)5.4.4 Disconnect (52)5.4.5 IsConnected (53)5.4.6 Play (53)5.4.7 Pause (54)5.4.8 Stop (54)5.4.9 GetLoadedProgram (55)5.4.10 LoadProgram (56)5.5 Ethernet模块 (56)5.5.1 模块简介 (56)5.5.2 功能列表 (56)5.5.3 Connect (57)5.5.4 Disconnect (58)5.5.5 IsConnected (58)5.5.6 AnalysisData (58)5.5.7 SetOutput (59)5.5.8 SetAnalogOutType (59)5.5.9 SetAnalogOutValue (60)5.5.10 SetBitInputRegister (61)5.5.11 SetIntInputRegister (62)5.5.12 SetFloatInputRegister (62)5.5.13 GetEthernetConnectionID (63)6 参数说明 (64)6.1 Modbus参数 (64)6.1.1 nModbusEntity (64)6.1.2 Modbus (73)6.1.3 Modbus.ModbusKey (75)6.2 30003参数 (76)6.2.1 n30003Entity (76)6.3 Dashboard参数 (87)6.3.1 Dashboard.ReturnCode (87)6.4 Ethernet参数 (88)6.4.1 nEthernetT2OEntity (88)7 错误信息 (99)7.1 错误信息列表 (99)8 运行环境 (101)3 产品内容本产品包含以下全部内容产品内容数量说明nURHelper.dll 1 调用类库硬件加密狗 1 硬件序列号设备nURHelper帮助手册 1 帮助手册4 范围定义4.1 适用机器人范围nURHelper.dll适用范围如表格所示,不在此表格所覆盖范围内的设备可能无法匹配。
基于URWPGSim2D平台的课程设计的探索与实践

ISSN 1002-4956 CN11-2034/T实验技术与管理Experimental Technology and Management第37卷第4期2020年4月Vol.37 No.4 Apr. 2020D O I:10.16791/ ki.sjg.2020.04.041基于U R W P G S im2D平台的课程设计的探索与实践罗耀耀,黄成洋,葛良全,曾国强,赵琦,阳小燕(成都理工大学核技术与自动化工程学院,四川成都610059)摘要:“肉动控制原理课程设计”是一门培养学生将控制理论用于实际T程的一门重要的实践课程,文章 介绍了以URW PGSim2D作为平台,根据水中鱼比赛和自控课程设计的要求进行相关的实验设计,并制定了评分规则实践表明,该课程设计能够强化学生的设计能力和丁程意识,并且能有效培养和激发学生的自主学习能力和科学探究能力。
关键词:H动控制原理课程设计;URW PGSim2D平台;2D仿真平台;精准控制中图分类号:TP13 文献标识码: B 文章编号:1002-4956(2020)04-0188-03Exploration and practice of curriculum design based onURWPGSim2D platformL U O Y a o y a o,H U A N G C h e n g y a n g,G E Liangquan,Z E N G G u o q i a n g,Z H A O〇i,Y A N G Xiaoyan(College of Nuclear Technology and Automation Engineering,Chengdu University of Technology, Chengdu 610059, China)Abstract:“A utom atic control principle course design” is an im portant practical course to train students to apply control theory to practical engineering. In this paper, the U R W PG Sim2D is used as the platform to carry out the relevant experim ental design according to the requirem ents o f w ater fish com petition and autom atic control course design, and the scoring rules are form ulated. The practice show s that the course design can strengthen students' design ability and engineering consciousness and can effectively cultivate and stim ulate their independent learning ability and scientific inquiry ability.Key words:autom atic control theory course design; U RW PG Sim2D platform; 2D sim ulation platform; precise control“自动控制原理课程设计”是自动化类专业的学 生将控制理论应用于实践的一个非常重要的课程[1]。
基于URWPGSim2D仿真平台水中机器鱼搬运策略分析
31
Copyright©博看网 . All Rights Reserved.
MH=(H.X,H.Y,H.Z+deltaZ) 在 deltaZ<0时有类似的关系,此时球位于洞的上方,需将 虚拟的洞口设置在 H的下方,不过在实际测试中,球总是往 Z 轴正方向偏移的,此时依旧沿用上式可能会出现接近洞口时, 向下调整过度而使球直接偏洞而过,所以我们在这里设置一个 系数 k来对 deltaZ的值进行适当缩小,即:
MH=(H.X,H.Y,H.Z+kdeltaZ) 经过多次测试发现,当球与洞的横向距离 deltaX>=100时 k=0.4比较合适,而当 deltaX<100时 k=-0.7比较合适,使鱼 既不会向 Z轴正方向调整过度,也不会向 Z轴负方向持续偏离 控球。
②计算新的顶球点。在虚拟洞坐标的基础上计算顶球点, 以虚拟洞和球中心的连线反向延长,得到随球的位置的变化不 停调整的顶球点坐标 MB,计算步骤如下:
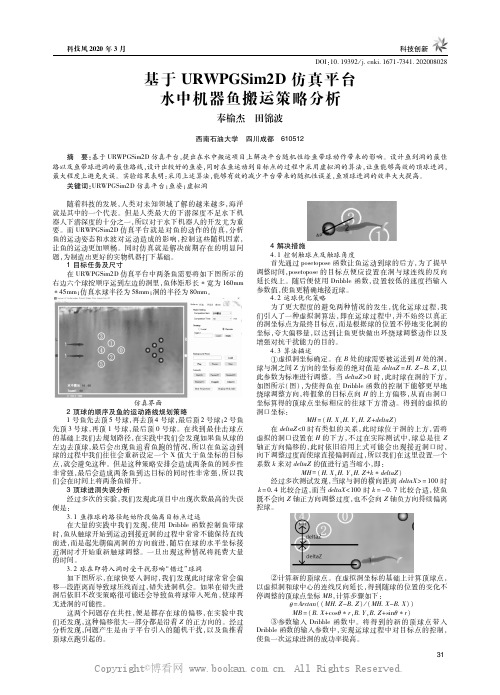
1目标任务及尺寸 在 URWPGSim2D仿真平台中两条鱼需要将如下图所示的 右边六个球按顺序运到左边的洞里,鱼体矩形长80mm。
仿真界面 2顶球的顺序及鱼的运动路线规划策略 1号鱼先去顶 5号球,再去顶 4号球,最后顶 2号球;2号鱼 先顶 3号球,再顶 1号球,最后顶 0号球。在找到最佳击球点 的基础上我们去规划路径,在实践中我们会发现如果鱼从球的 左边去顶球,最后会出现鱼追着鱼跑的情况,所以在鱼运动到 球的过程中我们往往会重新设定一个 X值大于鱼坐标的目标 点,就会避免这种。但是这种策略安排会造成两条鱼的同步性 非常强,最后会造成两条鱼到达目标的同时性非常强,所以我 们会在时间上将两条鱼错开。 3顶球进洞失误分析 经过多次的实验,我们发现此项目中出现次数最高的失误 便是: 3.1鱼推球的路径起始阶段偏离目标点过远 在大量的实践中我们发现,使用 Dribble函数控制鱼带球 时,鱼从触球开始到运动到接近洞的过程中常常不能保持直线 前进,而是起先朝偏离洞的方向前进,随后在球的水平坐标接 近洞时才开始重新触球调整。一旦出现这种情况将耗费大量 的时间。 3.2球在即将入洞时受干扰影响“错过”球洞 如下图所示,在 球 快 要 入 洞 时,我 们 发 现 此 时 球 常 常 会 偏 移一段距离而导致球压线而过,错失进洞机会。如果在错失进 洞后依旧不改变策略很可能还会导致鱼将球带入死角,使球再 无进洞的可能性。 这两个问题存 在 共 性,便 是 都 存 在 球 的 偏 移,在 实 验 中 我 们还发现,这种偏移很大一部分都是沿着 Z的正方向的。经过 分析发现,问题产生是由于平台引入的随机干扰,以及鱼推着 顶球点跑引起的。
UR 官方培训课程讲义ppt课件

August 2013
1
History
▪ 2005 Байду номын сангаас 2008:
• Development of UR5
▪ 2008:
• First commercial sales of UR5
▪ 2009:
• Distribution network established in Europe
URmagic files
23
URsim
Force Control
Features •Specify force control relative to coordinate system •Specify force control relative to motion •Define force in single axis or multiple axes •Limit tool velocity in compliant axes •Easy testing using the backrive button
DO[0] = HI
Event
Trigger: DO[0] = HI
DO[0] = LO
Sto p
18
Auto start Auto initialize Def. program
19
Service/troubleshooting Log history Joint replacement Low Level Control Calibrate joint
25
Force type: Frame Features •Multiple axes in compliant mode •Force level individual for each axis •Define speed for axes in compliant mode •Base, Tool, user defined frames
接口使用手册V1.2

//层参数结构体定义
Typedef struct LAYER_PARA
{
int
nCount;
// 打标次数
double dbMarkV;
//矢量打标速度(mm/s)
double dbJumpV;
//矢量空跳速度(mm/s)
double dbQFreq;
//Q 频(KHz)
double dbQRls;
pszFileName:打标文件完整路径及名称。
6、HS_GetDocList 语法:int HS_GetDocList(TCHAR szDocList[][50], int* pCount) 作用:获取当前所有已打开文档列表,文档名不允许超过 50Bytes。 参数描述:
szDocList:文档列表指针。 pCount:传入缓冲区数组大小,处理完成后返回实际获取文档数。
二次开发软件接口使用手册 V1.2
HANS 二次开发软件接口使用手册(V1.2)
版本号
1.0 1.1
1.2
修订日期
2010.10.10 2010.12.01
2011.02.16
修订人
钟四化 杨秀锋
钟四化
变更记录
初版 根据富士康需求,增加 Unicode、取错误接口. 根据定制部门的需求、增加对象及文档操作接口,提 供更丰富的应用
二、 返回值及结构体定义
所有函数返回值均为一个整形的通用错误码,码值定义如下
#define HL_ERR_SUCCESS
0 //成功
#define HL_ERR_PROGRUN
1 //另一个程序在运行
#define HL_ERR_PATH
2 //路径不正确
#define HL_ERR_FAILOPEN
deform2D手册_下
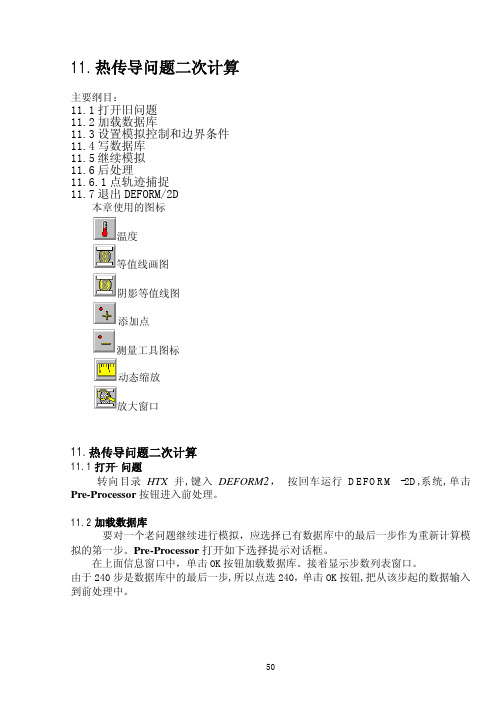
11.热传导问题二次计算主要纲目:11.1打开旧问题11.2加载数据库11.3设置模拟控制和边界条件11.4写数据库11.5继续模拟11.6后处理11.6.1点轨迹捕捉11.7退出DEFORM/2D本章使用的图标阴影等值线图测量工具图标放大窗口11.热传导问题二次计算11.1打开-问题转向目录HTX并,键入DEFORM2,按回车运行DEFORM -2D,系统,单击Pre-Processor按钮进入前处理。
11.2加载数据库要对一个老问题继续进行模拟,应选择已有数据库中的最后一步作为重新计算模拟的第一步。
Pre-Processor打开如下选择提示对话框。
在上面信息窗口中,单击OK按钮加载数据库。
接着显示步数列表窗口。
由于240步是数据库中的最后一步,所以点选240,单击OK按钮,把从该步起的数据输入到前处理中。
图11.1 - Select Database Step 窗口11.3设置模拟控制参数和边界条件单击Simulation Controls按钮,打开SIMULATION CONTROLS窗口。
接着单击Stopping Step按钮,程序会自动设置Starting Step Number(NSTART)为-240,设置Number of Simulation Steps (NSTEP)为60,Step Increment to Save (STPINC)为4,改变Time per Step (DTMAX)为1秒。
完成后单击OK按钮。
单击Processing Conditions按钮,打开其窗口,设置Environment Temperature(ENVTMP) 为68,并单击OK按钮,最后单击OK按钮退出SIMULA TION CONTROLS窗口。
重新设置工件的边界条件来模拟在空气中冷确的过程,这时工件的所有表面均暴露在环境中[前例中仅部分与环境有热交换],故而需初始化边界条件来重新设置(图11.2)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
URWPGSim2D开发人员手册V 1.2 Revised 20120101北京大学智能控制实验室 2012年1月目录1. 概述 (1)1.1. 读者对象 (1)1.2. 名词解释 (1)2. 开发环境 (2)2.1. 硬件环境 (2)2.2. 软件环境 (2)2.3. 搭建标准开发环境 (2)2.4. 开始开发 (3)2.5. 补充说明 (3)3. 整体设计 (3)3.1. 功能设计 (3)3.2. VS2008 Solution & Project结构 (3)3.3. 整体结构 (5)3.4. 服务端结构 (6)3.4.1. 以仿真使命为中心 (7)3.4.2. 以仿真循环为主线 (7)3.5. 版本控制 (8)3.5.1. 源码管理 (8)3.5.2. 产品管理 (8)4. 策略编写 (8)4.1. 策略是什么 (8)4.2. 策略调用方式 (8)4.2.1. 本地模式 (8)4.2.2. 远程模式 (9)4.2.3. 异步调用 (9)4.3. 编写指南 (9)4.3.1. 编程相关 (9)4.3.2. 业务相关 (12)4.3.3. 调试相关 (16)5. 标准函数 (16)5.1. PoseToPose函数 (16)5.1.1. 函数功能介绍 (16)5.1.2. 函数参数说明 (16)5.1.3. 函数调用方法 (17)5.2. Dribble函数 (17)5.2.1. 函数功能介绍 (17)5.2.2. 函数参数说明 (17)5.2.3. 函数调用方法 (18)1.概述本手册最新版本请从中国水中机器人大赛官方网站()仿真组资源下载页面获取。
1.1.读者对象本手册为可能参与URWPGSim2D软件设计、开发、测试和维护的人员和可能参与中国水中机器人大赛2D仿真比赛策略编写的人员编制,URWPGSim2D涉及的所有技术细节会尽最大可能记录于此。
1.2.名词解释1.URWPGSim2D:Underwater Robot Water Polo Game Simulator 2 Dimension Edition,水中机器人水球比赛仿真器2D版本。
2.MRDS:Microsoft Robotics Developer Studio,微软机器人开发套件。
R:Concurrency and Coordination Runtime,并发协调运行时,MRDS用于解决机器人软件开发中并发问题的技术和基础软件库。
4.DSS:Decentralized Software Services,分布式软件服务,MRDS用于解决机器人软件开发中异步问题的技术和基础软件库。
5.Simulation Mission:Mission,仿真使命,即仿真比赛或实验项目,模拟机器鱼比赛或实验项目的对象。
6.Simulation Environment:SimEnvironment,仿真环境,仿真使命运行所处的虚拟环境,其中包括仿真场地(模拟比赛或实验用水池的对象)、零个或多个仿真水球(模拟比赛或实验用水球的对象)、零个或多个仿真方形障碍物(模拟比赛或实验用方形障碍物的对象)、零个或多个仿真圆形障碍物(模拟比赛或实验用圆形障碍物的对象)。
7.Simulation RoboFish:RoboFish,仿真机器鱼,模拟比赛或实验用机器鱼的对象。
8.Simulation Loop:仿真循环,仿真使命运行过程中所有仿真动作顺序执行一遍的过程。
9.Simulation Cycle:仿真周期,理论上考虑为比单个仿真循环所耗时间(与运行软硬件环境有关,不能精确确定,在相同环境下,每次运行也不精确相同)预估最大值稍大的确定时间间隔(如100毫秒)。
当前(2011325)平台仿真循环在推荐的软硬件配置(见2开发环境)下所耗时间大约在10-20毫秒之间,为简化线程同步,在仿真使命的公共参数类中设置了一个成员MsPerCycle,保存一个初始化仿真使命时传入的整数值,称为“每周期毫秒数”,实际运行时的仿真周期值不确定,为MsPerCycle值加上当前周期仿真循环所耗时间,通常MsPerCycle都取100毫秒,仿真周期值大约在110-120毫秒之间。
仿真使命倒计时以根据MsPerCycle计算出来的总周期数递减的方式进行,故界面上显示的倒计时牌并不是按精确的世界时间递减。
10.Simulation Action:仿真动作,包括将策略计算出来的决策命令拷贝到每支队伍每条仿真机器鱼对象本身的决策字段(后续计算都是直接使用仿真机器鱼对象自身的决策命令)、对所有动态对象(目前包括每支队伍的所有仿真机器鱼、仿真环境中仿真水球列表的所有仿真水球)进行运动学计算、对所有对象(包括每支队伍的所有仿真机器鱼、仿真环境中所有对象)相互进行碰撞处理(包括碰撞检测和碰撞响应)。
2.开发环境2.1.硬件环境URWPGSim2D在PC机或工作站上进行开发,其硬件配置要求如表 2-1所示。
表 2-1 URWPGSim2D运行硬件配置表核心配件最低配置推荐配置CPU Intel P4 2.0GHz或同档次AMD CPU Intel E7300 2.66GHz或以上内存256MB 2GB或以上显卡支持DirectX 9.0,Pixel Shader 3.0,显存128M或以上硬盘10GB 80GB或以上2.2.软件环境操作系统:Windows XP Professional SP3,Windows Vista或Windows 7。
.Net框架:.Net Framework 3.5 with SP1。
IDE:Microsoft Visual Studio Team System 2008 Team Suite with SP1,或Microsoft Visual Studio 2008 Professional with SP1。
编程语言:C#(CSharp) V3.0。
MRDS:Microsoft Robotics Developer Studio 2008 R3。
附件:Microsoft XNA Framework Redistributable 3.1,Microsoft Excel 2003 Com Library。
2.3.搭建标准开发环境搭建开发环境所需软件,在中国水中机器人大赛官方网站仿真组资源下载页面部分提供本地下载,没有本地下载的则提供官方下载链接。
1.PC机或工作站安装Windows XP Professional SP3操作系统。
2.按照默认设置安装DotNet3.5SP1(该软件包集成了SP1,且安装时不需要联网,官方网站提供的安装包安装时需要联网)和XNA3.1。
3.按照至少保留C#开发相关组件的要求安装(建议除SQL Server数据库外的部分完全安装)Microsoft Visual Studio Team System 2008 Team Suite中文版with SP1并破解。
4. 按照默认设置安装TortoiseSVN1.6.5和VS2008的VisualSVN 插件并破解。
2.4. 开始开发从中国水中机器人大赛官方网站仿真组资源下载页面获取最新的URWPGSim2D 源代码SVN 地址及相应的用户名和密码,打开VS2008的VisualSVN 菜单选择“Get Solution from Subversion ”,输入得到的SVN 地址,弹出用户名和密码输入框时输入相应的值即可获得最新版本源代码。
为方便使用Visual Studio 的快捷键进行调试,需要先将ConductorSvr 项目设为启动项目。
操作方法是,在解决方案浏览器中,右键点击ConductorSvr 项目名称,选择“设为启动项目”。
2.5. 补充说明MRDS 不需要安装,URWPGSim2D 所要用到的由MRDS 提供的全部程序集(即DLL 文件)已经包含在源代码包的URWPGSim2D\bin 目录里。
3. 整体设计3.1. 功能设计URWPGSim2D 的主要作用是作为水中机器人竞赛平台和水中机器人科研平台,要求方便扩展竞赛和实验项目,方便独立编写竞赛和实验项目的策略算法。
URWPGSim2D 包括服务端(URWPGSim2DServer )和客户端(URWPGSim2DClient )两大部分。
服务端模拟水中环境,控制和呈现仿真过程及结果,向客户端发送实时仿真环境和过程信息;半分布式客户端模拟水中机器人队伍,全分布式客户端模拟单个水中机器人,加载比赛或实验策略,完成决策计算过程,向服务端发送决策结果。
3.2. VS2008 Solution & Project 结构URWPGSim2D 软件由一个名为URWPGSim2D.sln 的VS2008 C# Solution 生成,该Solution 包含至少9个(可扩展到更多)Project ,由依赖关系决定的生成次序如表 3-1所示。
所有Project 均使用名为URWPGSim2D.snk 的密钥文件进行签名以生成具有强名称的程序集。
URWPGSim2D1.0.11.316包括9个自有组件和MRDS 及其他第三方组件。
3-1 RWPGSim2D组件名对应的文件描述相应Project依赖的组表U 自有组件表称件Core URWPGSim2D.Core.dll运动学和动力学计算模块;随机扰动模块;碰撞响应模块Core 无Commo ndll 、config.xml模型;仿真使命模型;碰撞检测模块;系统配置模nCoremon.仿真机器鱼模型;仿真环境(场地/水球/障碍物/通道等)块;辅助函数模块Commo Match atch.dlltch 、Common URWPGSim2D.M 仿真使命具体实现模块(添加比赛项目的地方) Ma CoreStrategy URWPGSim2D.StrategyL 实现策略动态加载的辅助Strategy onLoaderoader.dll模块Loader Comm Gadget URWPGSim2D.Gadget.dll绘制轨迹,显示实时信息等无辅助功能模块GadgetSim2DS vrSim2DSvr.manifest.xml 、URWPGSim2D.Sim2DSvr nsform.服务端DSS 服务和界面模块Sim2DS vrn 、Match、StrategyLoa der 、GadgetURWPGSim2D.Sim2DSvr.Y2010.M11.dll 、.Y2010.M11.Proxy.dll 、URWPGSim2D.Sim2DSvr .Y2010.M11.Tra dll Commo Sim2DC ltl URWPGSim2D.Sim2DClt nsform.客户端DSS 服务和界面模块Sim2DC ltCommon 、Sim2DSvr 、StrategyLoa derSim2DClt.manifest.xm 、URWPGSim2D.Sim2DClt .Y2010.M11.dll 、.Y2010.M11.Proxy.dll 、URWPGSim2D.Sim2DClt .Y2010.M11.Tra dllConduct orSvr 服务端启动引导程序nduct orSvr DSvrURWPGSim2DServer.exeCo Sim2Conduct URWPGSim2DClient.exe 客户端启动引导程序 Conduct Sim2DCltorCltorCltURWPGSim2D Solution 目录(解决方案目录,Solution Directory )名称任意,默认为U im 可以取任意名称)。